Изобретение относится к области гидроакустики, а именно к техническим средствам позиционирования по гидроакустическому каналу различного рода подводных объектов (ПО), находящихся длительное время в подводном положении на большом удалении от пунктов управления, в том числе подо льдом.
Техническая проблема, которая возникает во время функционирования ПО в таких условиях, состоит в накоплении и росте погрешности определения координат бортовыми инерциальными навигационными системами ПО и необходимости уточнения своих координат без всплытия на поверхность, в отсутствии судов сопровождения и невозможности использования радионавигационных средств или систем GPS/ГЛОНАСС.
Известны примеры технической реализации навигационных систем (НС), осуществляющих передачу и прием навигационных сигналов на большие дистанции, например, для осуществления позиционирования автономных подводных аппаратов. Такие НС представляют собой комплексы, включающие системы формирования, излучения, приема и обработки навигационных сигналов, причем работа излучающих и приемных систем синхронизируется тем или иным способом, зависящим от алгоритма работы НС.
Известна система активного позиционирования подводного объекта (А Long-Range and High-Resolution Underwater Acoustic Positioning System. Marine Geodesy, Volume 14, pp. 225-231 1990), в которой используются опорные акустические ретрансляторы в виде стационарных буев. Ретранслятор имеет источник сложных (фазоманипулированных двоичной последовательностью максимальной длинны) сигналов и блок корреляционной обработки, который способствует детектированию принимаемых акустически сигналов с высоким отношением сигнал-шум. Приводятся сведения о работе НС на дистанции до 20 км.
Недостатком устройства является размещение на ПО акустического излучателя и блока усилителя мощности, которые служат для осуществления активного способа навигации, состоящего в излучении платформой сигнала запроса на срабатывание ретрансляторов. Это делает невозможным увеличение дальности действия НС на основе снижения частоты ввиду неизбежного роста массогабаритных характеристик излучателя при ограниченных размерах ПО.
Известен комплекс для проведения гидроакустических исследований, используемый в экспериментах по проверке эффективности новых систем навигации, связи и управления подводными роботами с использованием широкополосных сигналов в условиях мелкого моря (Мобильный измерительный комплекс для проведения гидроакустических исследований / М.А. Линник, И.В. Карабанов, И.Н. Бурдинский, А.С. Миронов, С.В. Власьевский // Информатика и системы управления - 2012. - №2 (32). - С. 82-91).
В состав комплекса входят два унифицированных блока приема-передачи гидроакустического сигнала, работающих в общей синхронной временной сетке, которая обеспечивается системой единого времени на базе приемников GPS и двух блоков сбора, обработки и отображения информации. В комплексе использовались широкополосные сигналы с центральной частотой, равной 11,7 кГц и 41,6 кГц, с помощью мобильного измерительного комплекса в реальном времени производилась обработка полученных данных. Недостатком устройства является незначительная дальность действия ввиду его предназначения, и связанного с этим использования диапазона рабочих частот выше 10 кГц.
Известно устройство мобильной навигационной системы, предназначенной для акустической навигации удаленных подводных объектов, включающее автономные излучающие системы (источники навигационных сигналов), приемный модуль в составе имитатора автономных необитаемых подводных аппаратов (радиогидроакустического буя), и центр анализа навигационных сигналов, находящийся на берегу или на плавсредстве, где обеспечивается прием и обработка радиосигналов от буя, вычисление географических координат и отображение траектории движения подводного объекта на акватории. (Мобильный измерительный комплекс для исследований в области акустической навигации удаленных подводных аппаратов. В.В. Безответных, А.В. Буренин, Е.А. Войтенко, Ю.Н. Моргунов, А.А. Тагильцев. Приборы и техника эксперимента. - 2011. - №6, с. 89-94).
Недостатком комплекса является малая дальность действия, связанная с конструкцией и недостаточно низкой частотой излучателя, а также с малой дальностью уверенного приема радиосигнала от имитатора ПО (10 - 15 км); невысокая точность определения координат имитатора ПО без использования данных GPS; недостаточная надежность устройства, связанная с пропусками сигнала по причине отсутствия в составе устройства средств компенсации эффекта Доплера, который возникает при движении ПО во время приема сигналов.
Наиболее близкой к заявляемой является акустическая система позиционирования подводного объекта в пределах шельфа на больших дальностях (50 - 100 км), основанная на принципе приема акустических сигналов в подводном звуковом канале (патент США №9013959 В2). Система включает по меньшей мере, два излучателя низкочастотных (100-500 Гц) сигналов, входящих в состав гидроакустических маяков (ГМ), снабженных цепочками термисторов и вычислительными устройствами, а также приемный модуль, находящийся на подводном объекте (ПО). Гидроакустические маяки и приемный модуль ПО снабжены системой единого времени. Приемный модуль ПО содержит гидрофон, принимающий излученные источником в соответствующий заранее определенный момент времени сигналы, вычислительное устройство, которое идентифицирует принятые акустические сигналы одной или нескольких мод, определяет групповую скорость идентифицированной моды, определяет время прихода моды для идентифицированного волноводного режима из принятых акустических сигналов на основе соответствующих заданных времен излучения сигнала, и определяет координаты ПО. Блок приемного модуля ПО может включать в себя передающий элемент для передачи акустического сигнала источнику или удаленному наблюдателю, дополнительно включать датчик глубины, например, датчик гидростатического давления для измерения глубины погружения ПО.
ГМ располагают на расстоянии около 30-40 км относительно друг друга в точках, координаты которых фиксируют.
Данная система акустического позиционирования корректно работает с использованием низкочастотных акустических сигналов в мелководных районах (таких как прибрежные районы), где распространение звуковых сигналов имеет волновой характер, поэтому известная система построена на реализации модовой модели описания распространения навигационных сигналов, что требует при идентификации моды и определении ее групповой скорости знаний о профилях скорости звука на трассах между источниками и приемником, а также их динамике. Кроме того, должны учитываться характеристики грунта, что также требует получения дополнительной информации, качество которой влияет на конечный результат позиционирования. Моды сигнала идентифицируются с помощью выставляемых вертикально термисторных цепочек, которые являются вспомогательными средствами измерений, и требуют периодического контроля и обслуживания, влияя на надежность системы.
Кроме того, система обладает малой дальностью действия, ограниченной размерами шельфовой зоны; требует определение профиля скорости звука вблизи каждого источника ГМ и в точке нахождения ПО, что снижает надежность системы ввиду большого количества дополнительных измерительных средств, необходимых для функционирования системы, и накопления погрешности при обработке большого объема данных, требующих калибровки самих измерительных средств; не учитывает влияния движения ПО на способность приема сигналов в полосе частот (отсутствие средств компенсации эффекта Доплера при движении ПО), что также снижает надежность системы ввиду возможных пропусков сигнала по этой причине, а также имеет недостаточную точность определения координат на дистанциях больших 100 км ввиду применения в системе дополнительных измерительных средств, не предназначенных для использования вне шельфа на больших глубинах.
Техническая проблема, требующая решения - разработка гидроакустической системы позиционирования дальнего действия для подводных объектов, определяющих собственные координаты в пассивном режиме.
Технический результат - увеличение дальности действия системы, точности определения координат и надежности приема сигналов.
Для решения данной проблемы предлагается гидроакустическая навигационная система (ГАНС), включающая как минимум два ГМ с широкополосными низкочастотными излучателями, и приемный модуль подводного объекта (ПО), снабженный вычислительным устройством, соединенным с гидрофоном и измерителем скорости звука, при этом гидроакустическая система дополнительно оборудована гидроакустическим приемоответчиком, работающим в обратимом режиме с одним из ГМ и обеспечивающим измерение текущих значений скорости звука на трассе между ними, а приемный модуль подводного объекта расположен вблизи оси подводного звукового канала (ПЗК) и дополнительно снабжен блоком корреляционных каналов компенсации доплеровского смещения несущей частоты сигналов ГМ.
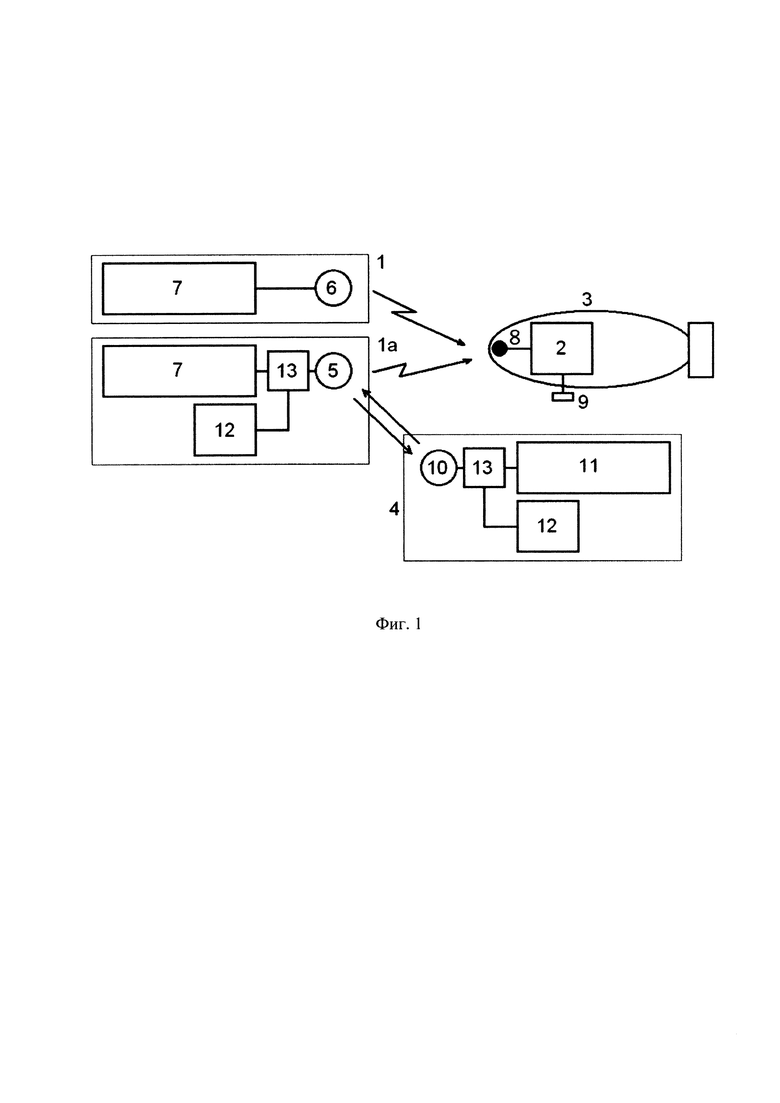
На фиг. 1 схематично представлен один из возможных вариантов предлагаемой навигационной системы, где 1 и 1а - гидроакустические маяки (ГМ); 2 - приемный модуль подводного объекта 3 - подводный объект (ПО); 4 - приемоответчик; 5 - стационарный излучатель ГМ 1а; 6 - мобильный излучатель ГМ 1; 10 - обратимый излучатель приемоответчика 4; 8 - гидрофон; 9 - измеритель скорости звука; 7 - передающие тракты ГМ; 11 - передающий тракт приемоответчика 4; 12 - приемные тракты приемоответчика и ГМ 1а, работающего в обратимом режиме; 13 - коммутаторы сигналов.
Система работает следующим образом. ГМ с излучателями размещают на шельфе с известными координатами излучателей, предпочтительно на участках его пологого склона. Они могут иметь стационарное, мобильное, автономное исполнение и использоваться в их различных комбинациях в зависимости от поставленных задач и гидрологических условий навигационного района. При установке одного из ГМ в мобильном варианте его излучатель снабжают датчиком глубины погружения. Вблизи границы шельфа в точку с известными координатами на грунт выставляют приемоответчик 4, который в рабочем режиме, синхронизированном с ГМ системой единого времени, принимает навигационные сигналы одного из ГМ, и после их обработки через строго определенное время излучает свой сигнал. Этот сигнал принимает ГМ 1а, работающий в обратимом режиме, при этом сигнал обрабатывается с определением времени двойного пробега дистанции между ГМ 1а и приемоответчиком 4 для измерения текущих значений скорости звука на трассе между ними, которые используют для уточнения эффективной скорости звука, принимаемой в расчетах дистанций и координат ПО.
Гидроакустические маяки формируют и излучают сигналы в синхронизированном режиме с приемным модулем 2 ПО по заданной программе. Координаты излучателей навигационных сигналов и программа (расписание) их работы вводятся в память вычислительного устройства ПО на этапе его подготовки к выполнению работ на акватории. Приемный модуль 2 ПО соединен с измерителем скорости звука 9 для поиска оси ПЗК и оборудован блоком корреляционных каналов компенсации доплеровского смещения несущей частоты сигналов ГМ. По заданной программе ГМ излучают навигационные сигналы. Сигналы, приходящие по гидроакустическому каналу от ГМ и принятые гидрофоном 8, усиливаются в приемном модуле ПО и обрабатываются его вычислительным устройством с определением дистанций и координат ПО.
Каждый из ГМ излучает свой программно сформированный и квазиортогональный к другим, сложный сигнал (например, модулированный М-последовательностью максимальной длины), что позволяет идентифицировать ГМ в приемном модуле ПО в процессе корреляционной обработки по уникальной структуре его сигнала. Маски (электронные копии) излучаемых ГМ сигналов предварительно загружаются в память вычислительного устройства ПО, функционально связанного с блоком корреляционной обработки. Блок корреляционной обработки навигационных сигналов имеет число корреляторов, соответствующее числу источников сигналов и дополнительные корреляторы для компенсации эффекта Доплера. В его устройстве технически реализован алгоритм корреляционного детектирования сложных сигналов с определением текущих значений порога шума. Полученные в результате корреляционной обработки времена задержки сигналов относительно момента излучения, значения эффективной скорости звука, рассчитанные по ним дистанции между излучателями и гидрофоном приемного модуля, а также имеющиеся в памяти координаты излучателей ГМ, используются для расчета собственных координат ПО. Возникающая при определении собственных координат ПО неоднозначность положения относительно ГМ, устраняется наличием береговой черты в местах расположения ГМ, и известными координатами излучателей.
Реализация обратимой работы одного из ГМ - 1а осуществляется с использованием известных технических решений путем включения в его состав коммутатора и тракта приема.
Выполнение одного из излучателей ГМ мобильным, позволяет ему функционировать как вывешенным за борт судна на определенную глубину на якорной стоянке, так и установленным на грунт, что повышает надежность навигационной системы, поскольку он может применяться как дублирующий, для временной замены при отказе стационарного излучателя. Кроме того, мобильные излучатели могут быть использованы в ГАНС вместо стационарных при коротком времени позиционирования ПО, а также в комбинациях со стационарными или автономными ГМ.
Заявляемые технические решения реализованы в ГАНС и проверены при проведении экспериментальных исследований по позиционированию имитаторов ПО в натурных условиях на их удалениях от ГМ до 400 км.
Техническая реализация устройства ГАНС может быть осуществлена, например, следующим образом.
В качестве объекта позиционирования при отработке элементов ГАНС и системы в целом, служил имитатор ПО, при этом его приемный модуль погружался на глубину ПЗК, определяемую с помощью измерителя скорости звука.
Передающий тракт 7 ГМ 1 и 1а включал систему единого времени и блок генерации сигналов, который воспроизводил заранее подготовленный и записанный на SD-карту файл, содержащий сложные акустические сигналы, служащие для определения времени распространения сигнала от излучателя к приемному модулю ПО, и последующего расчета дистанции между ними. Блок генерации сигналов работал под управлением микроконтроллера STM32F103ZE.
Система единого времени выполнена на основе программируемой логической интегральной схемы (ПЛИС) семейства Cyclone IV, она определяет момент старта (метки времени) генерации акустических сигналов, синхронизированного с источником точного времени с точностью 10-6 сек. Аналоговый сигнал с выхода блока генерации сигналов поступал на усилитель мощности, типа PHONIC ХР5000 мощностью 5 кВт. К усилителю мощности через элементы электрического согласования выхода усилителя с нагрузкой подключался широкополосный гидроакустический излучатель, собранный на основе пьезоколец диаметром 1000 мм, с водозаполненным внутренним объемом (разгруженная конструкция).
Существуют иные способы конструктивного исполнения излучателя, однако, основным требованием к излучателю остаются: достижение необходимой мощности, полосы рабочих частот, неискаженное преобразование формируемого блоком генерации сложного сигнала в акустический, предпочтительно на несущих частотах диапазона 200 - 800 Гц.
Мобильный излучатель на основе таких же пьезоколец, имеет меньший вертикальный размер для снижения массы, и заполнен внутри воздухосодержащим полимером для снижения эффекта акустического замыкания и увеличения водоизмещения.
ГМ в стационарном исполнении доставлялся судном в обозначенную точку, где выполнялась постановка на грунт излучателя навигационной системы (ИНС), прокладка кабеля к побережью, и размещение на нем аппаратуры ГМ.
ГМ в мобильном исполнении доставлялся судном в обозначенную точку, где мобильный излучатель вывешивался за борт в придонную область, а аппаратура ГМ находилась на борту судна.
При выполнении ГМ в автономном исполнении он доставляется судном в обозначенную точку, где выставляется в дрейф с погружением излучателя на глубину ПЗК, определяемую с помощью измерителя скорости звука. ГМ в дрейфе сопровождается судном.
Выставленные для позиционирования ПО маяки излучают навигационные сигналы по заданной программе.
Сигналы ГМ, поступающие на гидрофон приемного модуля имитатора ПО, после усиления обрабатывались корреляционными приемниками, в которых реализован алгоритм корреляционного детектирования фазоманипулированных сигналов типа М-последовательностей. Процедуры корреляционной обработки выполнялись на вышеуказанной ПЛИС, в качестве вычислительного устройства использовался персональный компьютер.
Приемоответчик с мобильным излучателем при проверке функционирования ГАНС в натурных условиях размещался на дрейфующем судне на удалении до 20 км от ГМ, установленного у побережья, при этом излучатель вывешивался за борт в придонную область, а его текущие координаты определялись по навигационной аппаратуре судна, и передавались по радиоканалу в пункт управления ГМ.
Таким образом, заявляемая гидроакустическая синхронизированная навигационная система дальнего радиуса действия позволила решить обозначенную проблему с достижением заявленного технического результата. Она обеспечила значительно большую дальность действия - сотни километров (до 400 км) и высокую точность позиционирования ПО с использованием как минимум двух гидроакустических маяков и только гидроакустического канала за счет введения в состав ГАНС гидроакустического приемоответчика, служащего для уточнения величины скорости звука в границах шельфа, компенсации эффекта Доплера посредством включения в вычислительное устройство приемного модуля ПО блока корреляционных каналов компенсации доплеровского смещения несущей частоты сигналов ГМ, а также за счет контроля скорости звука на борту ПО для выполнения приема сигналов на оси ПЗК, использования сложных сигналов низкочастотного диапазона, излучения сигналов в водную среду мощными широкополосными гидроакустическими излучателями, прием навигационных сигналов бортовым приемным модулем ПО, работающим только в пассивном режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ позиционирования подводного объекта на больших дистанциях | 2022 |
|
RU2794700C1 |
| Способ навигационного оборудования морского района | 2022 |
|
RU2789999C1 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| Способ позиционирования автономного подводного аппарата в глубоком море | 2022 |
|
RU2792922C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| Абонентский приемник в составе гидроакустической системы позиционирования большой дальности для глубокого моря | 2022 |
|
RU2789636C1 |
Использование: изобретение относится к области гидроакустики, а именно к техническим средствам позиционирования только по гидроакустическому каналу различного рода подводных объектов (ПО), находящихся длительное время в подводном положении, и удаленных на сотни километров от побережья, судов сопровождения и пунктов управления, в том числе подо льдом. Технический результат: увеличение дальности действия системы, точности определения координат и надежности приема сигналов. Сущность: гидроакустическая синхронизированная навигационная система включает как минимум два гидроакустических маяка, снабженных широкополосными низкочастотными излучателями, установленными на глубинах шельфа, и гидроакустический приемоответчик, установленный вблизи границы шельфа. Приемный модуль подводного объекта осуществляет прием сигналов гидроакустических маяков вблизи оси подводного звукового канала и имеет в своем составе гидрофон, измеритель скорости звука и вычислительное устройство, дополнительно снабженное блоком корреляционных каналов компенсации доплеровского смещения несущей частоты принятых сигналов. 2 з.п. ф-лы, 1 ил.
1. Гидроакустическая навигационная система дальнего радиуса действия, включающая как минимум два гидроакустических маяка, снабженных широкополосными низкочастотными излучателями, установленными на глубинах шельфа и приемный модуль подводного объекта, снабженный гидрофоном, измерителем скорости звука и вычислительным устройством, отличающаяся тем, что гидроакустическая навигационная система дополнительно оборудована гидроакустическим приемоответчиком, работающим с одним из гидроакустических маяков в обратимом режиме и обеспечивающим измерение текущих значений скорости звука на трассе между ними, приемный модуль подводного объекта дополнительно снабжен блоком корреляционных каналов компенсации доплеровского смещения несущей частоты сигналов, а гидрофон расположен на оси подводного звукового канала.
2. Гидроакустическая навигационная система по п. 1, отличающаяся тем, что гидроакустические маяки выполнены стационарными.
3. Гидроакустическая навигационная система по п. 1, отличающаяся тем, что один из гидроакустических маяков выполнен мобильным.
| US 9013959 B2, 21.04.2015 | |||
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2353949C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ПОДВОДНОЙ НАВИГАЦИИ | 2014 |
|
RU2617134C2 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход | 2018 |
|
RU2687844C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 1995 |
|
RU2084923C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| CN113686385 A, 23.11.2021. | |||

