Предлагаемое изобретение относится к области цифровой обработки сигналов и может быть использовано в бортовых цифровых вычислительных машинах (БЦВМ) летательных аппаратов (ЛА) и беспилотных летательных аппаратов (БПЛА) при их наведении (самонаведении) на воздушный объект (ВО) по информации, получаемой от нескольких радиолокационных станций (РЛС) ЛА, нескольких РЛС БПЛА и нескольких индикаторов варианта тактической ситуации в условиях группового применения ЛА и БПЛА, для повышения точности совместного распознавания варианта тактической ситуации и фильтрации фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА» в комплексной системе наблюдения «РЛС ЛА-РЛС БПЛА-индикаторы ЛА и БПЛА», для повышения надежности и устойчивости к срывам автосопровождения этой системы наблюдения, для повышения степени адаптации системы комплексной обработки информации к сменам вариантов тактической ситуации, а также для решения задачи интерполяции (сглаживания) варианта тактической ситуации и фазовых координат.
Задача совместного распознавания варианта тактической ситуации и фильтрации фазовых координат включает среди прочего определение направления БПЛА на ВО и величины предполагаемого промаха в интересах повышения эффективности действия полезной нагрузки БПЛА за счет оптимального определения времени задержки на срабатывание полезной нагрузки при сближении БПЛА и ВО на малые дальности.
Задача совместной интерполяции варианта тактической ситуации и фазовых координат решается в интересах анализа эффективности группового применения нескольких ЛА и нескольких БПЛА в трех постановках: на закрепленном интервале, в закрепленной точке, с постоянным запаздыванием.
Известен способ определения мгновенного положения точки промаха БПЛА по информации угломерного канала [1-3], заключающийся в том, что БПЛА в процессе самонаведения сближается с маневрирующим ВО по методу пропорциональной навигации, в информационно-измерительной системе (ИИС) БПЛА, включающей навигационную систему, измерители положения БПЛА относительно центра массы, РЛС и БЦВМ, формируются оценки фазовых координат, необходимые для реализации самонаведения БПЛА на ВО, до момента t0 РЛС в составе ИИС реализует измерения следующего вектора фазовых координат относительного перемещения ВО и БПЛА:

при этом вектор измерения имеет вид:

где
k - дискретный момент времени и относится ко всем элементам вектора;
xk - вектор фазовых координат относительного перемещения ВО и БПЛА;
βk и εk - азимут и угол места ВО;
ωk - угловая скорость линии визирования БПЛА на ВО;
Dk и Vk - радиальные соответственно дальность и скорость сближения с ВО;
γk, ψ k и θk - углы соответственно крена, рыскания и тангажа БПЛА (БПЛА стабилизирован по крену);
T - операция транспонирования матрицы;
 - измерения величин, стоящих под чертой,
- измерения величин, стоящих под чертой,
при минимальных расстояниях между БПЛА и ВО, а также в момент ослепления ИИС БПЛА ее угломерный канал (угломер интенсивно маневрирующих ВО) формирует значения положения линии визирования БПЛА на ВО по азимуту Δβk и углу места Δεk, знаки положения этой линии визирования относительно направления на ВО по азимуту ±Δβk и по углу места ±Δεk, задаются нижние  и верхние в границы секторов картинной плоскости ВО, выбранного для наведения, по следующим соотношениям [1-3]:
и верхние в границы секторов картинной плоскости ВО, выбранного для наведения, по следующим соотношениям [1-3]:
например, для 1-го сектора значения нижней и верхней границ примут вид:
Ω1,н=(0 0 1)T, Ω1,в=(Δβmax, Δεmax, ∝)T,
для 2-го сектора:
Ω2,н=(0 0 0)T, Ω2,в=(Δβmax, Δεmax, 1)T,
для 3-го сектора:

…
для 8-го сектора
Ω8,н=(0, -Δεmax, -∝)T, Ω8,в=(Δβmax, 0, -1)T, где
k - дискретный момент времени;
Δβk и Δεk - фактические положения линии визирования БПЛА на ВО соответственно по азимуту и углу места;
Δβmax и Δεmax - границы секторов картинной плоскости ВО соответственно по азимуту и углу места;
δk - отношение продольного промах БПЛА к поперечному;
hx,k и hz,k - промах БПЛА соответственно продольный и поперечный;
s1,k - номер сектора картинной плоскости ВО, в котором находится точка мгновенного промаха БПЛА (радиальное направление на ВО),
 - соответственно нижние и верхние границы секторов картинной плоскости ВО;
- соответственно нижние и верхние границы секторов картинной плоскости ВО;
{… и [… - в выражении (16), эквивалентные обозначения логических операций соответственно «и» и «или»;
 - логическое «и»;
- логическое «и»;
… - условный знак «по аналогии», формируется вектор измерения в соответствии с выражением:

где
zk - вектор измерения;
 - измеренные ИИС радиальные соответственно дальность от БПЛА до ВО и их относительная скорость сближения;
- измеренные ИИС радиальные соответственно дальность от БПЛА до ВО и их относительная скорость сближения;
 - измеренные ИИС положения линии визирования БПЛА на ВО соответственно по азимуту и углу места, а также формируются комплексные показания
- измеренные ИИС положения линии визирования БПЛА на ВО соответственно по азимуту и углу места, а также формируются комплексные показания

индикатора варианта тактической ситуации (при наличии индикаторов или обнаружителей),
где
 - показания индикатора нахождения точки мгновенного промаха БПЛА в конкретном секторе картинной плоскости ВО;
- показания индикатора нахождения точки мгновенного промаха БПЛА в конкретном секторе картинной плоскости ВО;
 - показания индикатора типа ВО;
- показания индикатора типа ВО;
 - показания индикатора поперечной перегрузки ВО;
- показания индикатора поперечной перегрузки ВО;
 - показания обнаружителя ослепления ИИС БПЛА,
- показания обнаружителя ослепления ИИС БПЛА,
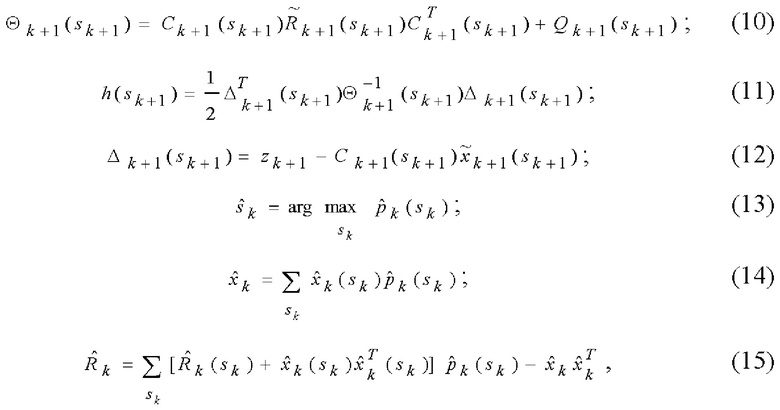
которые поступают на вход многоканального фильтра, функционирующего в соответствии с процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы [1,2, 4-7]:
основанной на априорных данных в виде математической модели (ММ) системы «БПЛА-ВО-ИИС-индикатор» со случайной скачкообразной структурой (ССС), включающей линейную модель динамики радиальных дальности до ВО, скорости сближения БПЛА с ВО, постоянной и флуктуационной составляющих этой скорости, флуктуационной составляющей ускорения относительного перемещения БПЛА и ВО, положения линии визирования БПЛА на ВО по азимуту и углу места, а также азимутальных и угломестных составляющих угловой скорости этой линии визирования

линейную модель измерений этих фазовых координат в ИИС

марковскую модель смены сектора нахождения точки мгновенного промаха БПЛА

марковскую модель смены типа ВО

марковскую модель смены значения поперечной перегрузки ВО

марковскую модель возникновения и пропадания ослепления ИИС

с марковской моделью смены тактической ситуации

марковскую модель индикатора сектора нахождения точки мгновенного промаха БПЛА

марковскую модель индикатора типа ВО

марковскую модель индикатора значения поперечной перегрузки ВО

марковскую модель обнаружителя ослепления ИИС

с марковской моделью индикатора тактической ситуации (при наличии индикаторов или обнаружителей)

модели неуправляемых случайных возмущений и помех

при начальных условиях

где
k - дискретный момент времени;
xk=(Dk, Vk, Vп,k, ΔVk, ak, Δβk, Δωβ,k, Δεk, Δωε,k)T - вектор фазовых координат относительного перемещения ВО и БПЛА;
sk=(s1, s2, s3, s4)k - вектор состояния структуры, индекс варианта тактической ситуации ( - номер сектора нахождения точки мгновенного промаха БПЛА;
- номер сектора нахождения точки мгновенного промаха БПЛА;  - тип ВО, 1 - малый, 2 - средний, 3 - большой;
- тип ВО, 1 - малый, 2 - средний, 3 - большой;  - значение поперечной перегрузки ВО, ед.; s4=1, 2 - наличие ослепления ИИС, 1 - ослепление отсутствует, 2 - произошло ослепление);
- значение поперечной перегрузки ВО, ед.; s4=1, 2 - наличие ослепления ИИС, 1 - ослепление отсутствует, 2 - произошло ослепление);
 - вектор измерений ИИС;
- вектор измерений ИИС;
 - выходные показания индикатора варианта тактической ситуации;
- выходные показания индикатора варианта тактической ситуации;
uk - вектор управляющих БПЛА сигналов;
ξk, ζk - стандартные дискретные векторные белые шумы;
Ak(sk+1, sk), Bk(sk+1, sk), Fk(sk+1, sk), Ck(sk), Ek(sk) - известные матрицы детерминированных функций случайных аргументов sk и sk+1;
Ak(sk+1, sk) - матрица динамики фазовых координат относительного перемещения ВО и БПЛА при фиксированной смене варианта тактической ситуации;
Bk(sk+l, sk) - матрица управления БПЛА при фиксированной смене варианта тактической ситуации;
Fk(sk+l, sk) - матрица возмущений при фиксированной смене варианта тактической ситуации;
Ck(sk) - матрица измерения фазовых координат относительного перемещения ВО и БПЛА при фиксированном варианте тактической ситуации;
Ek(sk) - матрица ошибок измерения фазовых координат взаимного перемещения ВО и БПЛА при фиксированном варианте тактической ситуации;
q1,k(s1,k+1 | s1,k) _ условные вероятности смены секторов нахождения точки мгновенного промаха БПЛА, причем если принять s1,k+1=1 при s1,k=8, а s1,k-1=8 при s1,k=1, то (∀ s1,k, s1,k+1:s1,k+1 ∉ {s1,k, s1,k+1, s1,k-1}) q1,k(s1,k+1 | s1,k)=0,
что отражает возможные альтернативы смены сектора нахождения точки мгновенного промаха БПЛА, а именно на следующем шаге дискретизации может произойти или сохранение положения точки мгновенного промаха БПЛА в текущем секторе картинной плоскости, или переход этой точки в один из соседних секторов, помимо этого при допущении об отсутствии смены секторов полагается  где Kij - символ Кронекера;
где Kij - символ Кронекера;
q2,k(s2,k+1 | s2,k) - условные вероятности смены типа ВО; так как изменение типа ВО не возможно, то 
q3,k(s3,k+1| s3,k) - условные вероятности смены значения поперечной перегрузки ВО; так как значение перегрузки может меняться только на одно из соседних значений, то
(∀ s3, k, s3, k+1: s3, k+1 ∉ {s3, k, s3, k+1, s3, k -1}) q3, k(s3,k+1 | s3, k)=0;
q4, k(s4, k+1 | s4, k) - условные вероятности возникновения (не возникновения) и пропадания (не пропадания) ослепления ИИС;
qk(sk+l | sk) - условные вероятности смены тактической ситуации;
π1,k(r1, k+1 | r1, k, s1, k+1) - условные вероятности смены показаний индикатора сектора нахождения точки мгновенного промаха БПЛА; при отсутствии индикатора, в (19 г) полагается π1,k(r1, k+1 | r1, k, s1, k+1)=1;
π2,k(r2, k+1 | r2, k, s2, k+1) - условные вероятности смены показаний индикатора типа ВО; при его отсутствии, в (19 г) полагается π2,k(r2, k+1 | r2, k, s2, k+1)=1;
π3,k(r3, k+1 | r3, k, s3, k+1) _ условные вероятности смены показаний индикатора значения поперечной перегрузки ВО; при отсутствии такого индикатора, в (19 г) полагается π3, k(r3, k+1 | r3, k, s3, k+1)=1;
π4, k(r4, k+1 | r4, k, s4, k+1) _ условные вероятности смены показаний обнаружителя ослепления ИИС; при отсутствии такого индикатора, в (19 г) полагается π4, k(r4, k+1 | r4, k, s4, k+1)=1;
πk(rk+1 | rk, sk+1) - условные вероятности смены показаний индикатора варианта тактической ситуации; при его отсутствии, в (9) полагается πk(rk+1 | rk, sk+1)=1;
Fk(sk+1, sk)ξk, Ek(sk)ζk - удобное для моделирования представление векторов шумов соответственно возбуждения и измерения при фиксированном варианте тактической ситуации;
Gk(sk+l, sk), Qk(sk) - ковариационные матрицы (КМ) соответственно векторов шумов возбуждения Fk(sk+1,sk)ξk и измерения Ek(sk)ζk;
 - прогнозируемые на один шаг дискретности вперед и апостериорные соответственно вероятности возникновения sk+l-го варианта тактической ситуации, условные математические ожидания (МО) фазовых координат при фиксированном варианте тактической ситуации, условные КМ ошибок оценивания фазовых координат при фиксированном варианте тактической ситуации;
- прогнозируемые на один шаг дискретности вперед и апостериорные соответственно вероятности возникновения sk+l-го варианта тактической ситуации, условные математические ожидания (МО) фазовых координат при фиксированном варианте тактической ситуации, условные КМ ошибок оценивания фазовых координат при фиксированном варианте тактической ситуации;
 - начальные условия фильтрации;
- начальные условия фильтрации;
 - квазиоптимальная по критерию максимума апостериорной вероятности оценка варианта тактической ситуации, включающей радиальное направление на ВО - номер сектора нахождения точки мгновенного промаха БПЛА;
- квазиоптимальная по критерию максимума апостериорной вероятности оценка варианта тактической ситуации, включающей радиальное направление на ВО - номер сектора нахождения точки мгновенного промаха БПЛА;
 - апостериорное безусловное по отношению к вариантам тактической ситуации МО фазовых координат, включающих величину промаха в текущий момент времени;
- апостериорное безусловное по отношению к вариантам тактической ситуации МО фазовых координат, включающих величину промаха в текущий момент времени;
 - апостериорная безусловная по отношению к вариантам тактической ситуации КМ ошибок оценивания фазовых координат;
- апостериорная безусловная по отношению к вариантам тактической ситуации КМ ошибок оценивания фазовых координат;
Θk(sk) - условная KM измерения при фиксированном варианте тактической ситуации;
 - обратная матрица по отношению к матрице Θk(sk);
- обратная матрица по отношению к матрице Θk(sk);
det Θk(sk) - определитель матрицы Θk(sk);
Δk+1(sk+1) - отклонение результата измерения от прогноза (невязка измерения) при фиксированном варианте тактической ситуации;
 - в (7), (8), матрица коэффициентов усиления (доверия измерению) при фиксированном варианте тактической ситуации;
- в (7), (8), матрица коэффициентов усиления (доверия измерению) при фиксированном варианте тактической ситуации;
 - в (12), ожидаемый (прогнозируемый) результат измерения при фиксированном варианте тактической ситуации;
- в (12), ожидаемый (прогнозируемый) результат измерения при фиксированном варианте тактической ситуации;
πk(rk+1 |rrk, sk+1)[det Θk+1(sk+1)]-1/2 exp[-hk+1(sk+1)] - в (6), (9), функция правдоподобия;
 - в (6), нормировочный коэффициент;
- в (6), нормировочный коэффициент;
 - в (11), квадратичная форма;
- в (11), квадратичная форма;
T - операция транспонирования матрицы;
ехр[⋅] - экспоненциальная функция;
 - упрощенное обозначение суммирования;
- упрощенное обозначение суммирования;
n(s) - мощность (число элементов) множества возможных вариантов тактической ситуации,
определяется оценка  варианта тактической ситуации, включающего радиальное направление на ВО, определяется оценка
варианта тактической ситуации, включающего радиальное направление на ВО, определяется оценка  безусловного по отношению к варианту тактической ситуации МО фазовых координат, включающих величину промаха в текущий момент времени, определяется оценка
безусловного по отношению к варианту тактической ситуации МО фазовых координат, включающих величину промаха в текущий момент времени, определяется оценка  безусловной по отношению к варианту тактической ситуации КМ ошибок оценивания фазовых координат, на основе ММ (16) динамики фазовых координат, включающих радиальные дальность Dk до ВО, скорость Vk сближения БПЛА с ВО и ее постоянную Vп, k и флуктуационную ΔVk+l составляющие, флуктуационную составляющую ak+1 ускорения относительного перемещения БПЛА и ВО, положение линии визирования БПЛА на ВО по азимуту Δβk и углу места Δεk, а также составляющие Δωβ, k и Δωε, k угловой скорости этой линии визирования; на основе модели, которая в дискретном времени имеет вид:
безусловной по отношению к варианту тактической ситуации КМ ошибок оценивания фазовых координат, на основе ММ (16) динамики фазовых координат, включающих радиальные дальность Dk до ВО, скорость Vk сближения БПЛА с ВО и ее постоянную Vп, k и флуктуационную ΔVk+l составляющие, флуктуационную составляющую ak+1 ускорения относительного перемещения БПЛА и ВО, положение линии визирования БПЛА на ВО по азимуту Δβk и углу места Δεk, а также составляющие Δωβ, k и Δωε, k угловой скорости этой линии визирования; на основе модели, которая в дискретном времени имеет вид:
или в векторно-матричном представлении (16)
отдельно для параметров относительного радиального перемещения ВО и БПЛА (22)-(26)

отдельно для параметров положения и движения по азимуту (27), (28)
отдельно для параметров положения и движения по углу места (29), (30)

или совместно для рассматриваемых фазовых координат
где
Dk и Vk - радиальные соответственно дальность от БПЛА до ВО и их относительная скорость сближения;
Vп, k и ΔVk+1 - соответственно постоянная и флуктуационная составляющие радиальной скорости сближения БПЛА с ВО;
a k+1 - флуктуационная составляющая ускорения относительного перемещения БПЛА и ВО;
Δβk и Δεk - положения линии визирования БПЛА на ВО соответственно по азимуту и углу места;
Δωβ, k и Δωε, k - составляющие угловой скорости линии визирования БПЛА на ВО соответственно по азимуту и углу места;
sk=(s1, s2, s3, s4)k - вектор состояния структуры, номер варианта тактической ситуации ( - номер сектора нахождения точки мгновенного промаха БПЛА;
- номер сектора нахождения точки мгновенного промаха БПЛА;  - тип ВО, 1 - малый, 2 - средний, 3 - большой;
- тип ВО, 1 - малый, 2 - средний, 3 - большой;  - значение поперечной перегрузки ВО, ед.; s4=1, 2 - наличие ослепления ИИС, 1 - ослепление отсутствует, 2 - произошло ослепление); каждой тактической ситуации ставятся в соответствие заранее определенные модели динамики фазовых координат и их измерений, построенные для ожидаемых усредненных условий применения БПЛА;
- значение поперечной перегрузки ВО, ед.; s4=1, 2 - наличие ослепления ИИС, 1 - ослепление отсутствует, 2 - произошло ослепление); каждой тактической ситуации ставятся в соответствие заранее определенные модели динамики фазовых координат и их измерений, построенные для ожидаемых усредненных условий применения БПЛА;
Δ t - интервал дискретизации;
α(sk), αβ(sk) и αε(sk) - коэффициенты, определяющие маневренные свойства ВО относительно БПЛА для каждого варианта sk тактической ситуации, соответственно радиальные, по азимуту и по углу места;
β(sk) - квадрат частоты скоростных флуктуаций взаимного перемещения БПЛА и ВО в зависимости от варианта sk тактической ситуации;
 - центрированные дискретные белые шумы возбуждения с дисперсиями соответственно
- центрированные дискретные белые шумы возбуждения с дисперсиями соответственно 

 - дисперсии флуктуационных составляющих соответственно радиального ускорения относительного перемещения БПЛА и ВО, угловой скорости линии визирования БПЛА на ВО по азимуту и углу места, в зависимости от варианта sk тактической ситуации;
- дисперсии флуктуационных составляющих соответственно радиального ускорения относительного перемещения БПЛА и ВО, угловой скорости линии визирования БПЛА на ВО по азимуту и углу места, в зависимости от варианта sk тактической ситуации;
ξ1, k, ξ2, k и ξ3, k - независимые стандартные дискретные белые шумы;
 - удобное для моделирования представление вектора
- удобное для моделирования представление вектора  шумов возбуждения с КМ
шумов возбуждения с КМ  - вектор независимых стандартных дискретных белых шумов;
- вектор независимых стандартных дискретных белых шумов;
Gr(sk), Gβ(sk) и Gε(sk) - KM векторов шумов возбуждения соответственно Fr, k(sk)ξr, k, Fβ,k(sk)ξβ,k и Fε, k(sk)ξε, k;
xk, Ak(sk), Fk(sk), ξk, Gk(sk) - в выражении (34), блочные вектора и матрицы;
D00, V00, ΔV00, a00, Δβ00, Δωβ,00, Δεk, 00, Δωε,00 - начальные условия, значения соответственно дальности до ВО, относительной скорости сближения БПЛА с ВО, ее постоянной и флуктуационной составляющих, флуктуационной составляющей ускорения относительного перемещения БПЛА и ВО, детерминированных и флуктуационных составляющих радиальных скоростей, флуктуационных составляющих радиальных ускорений, положения линии визирования БПЛА на ВО и ее угловая скорость по азимуту, положения линии визирования БПЛА на ВО и ее скорость по углу места, и на основе ММ (17) измерений в ИИС радиальных дальности Dk до ВО и относительной скорости Vk ее сближения с БПЛА, положений линии визирования БПЛА на ВО по азимуту Δβk и углу места Δεk, которая в дискретном времени и векторно-матричном представлении имеет вид:
где
 - дисперсии шумов измерения соответственно радиальных дальности до ВО и скорости сближения с ним, а также положений линии визирования БПЛА на ВО по азимуту и углу места;
- дисперсии шумов измерения соответственно радиальных дальности до ВО и скорости сближения с ним, а также положений линии визирования БПЛА на ВО по азимуту и углу места;
ζD, k, ζV,k, ζβ, k и ζε, k - независимые стандартные дискретные белые шумы;
Qk - КМ вектора шумов измерения Ekζk.
На основании (1в) определяется оценка  отношения продольного промаха БПЛА к поперечному в соответствии с выражением [3]:
отношения продольного промаха БПЛА к поперечному в соответствии с выражением [3]:

определяется оценка  динамической составляющей промаха в момент окончания самонаведения, в соответствии с выражением [8, 9]:
динамической составляющей промаха в момент окончания самонаведения, в соответствии с выражением [8, 9]:

определяется оценка  дисперсии промаха в соответствии с выражением [8, 9]:
дисперсии промаха в соответствии с выражением [8, 9]:

где
Kивс, Kср, K1, KV, Kω - коэффициенты передачи соответственно информационно-вычислительной системы БПЛА, системы «автопилот БПЛА - БПЛА», системы формирования сигнала рассогласования в соответствии с методом наведения, измерителя скорости сближения, угломера при оценивании угловой скорости линии визирования;
Gω - спектральная плотность шума оценки угловой скорости линии визирования;
ΔFэф - эффективная полоса пропускания системы самонаведения по угловому шуму;
N0 - навигационный параметр метода наведения, при отсутствии достаточного количества априорных сведений полагаем
Kивс=Kср=K1=KV=Kω=1,
тогда выражение (37) вырождается в известное [10]:

а (38) вырождается в

С учетом оценок (36)-(40) формируется расширенный вектор оценок фазовых координат в соответствии с выражением

а также расширенная КМ ошибок оценивания фазовых координат

Существенными признаками известного способа определения мгновенного положения точки промаха БПЛА по информации угломерного канала [1-3] являются:
1. Применение многоканального, по числу рассматриваемых тактических ситуаций, фильтра совместных оценивания радиальных дальности до цели, скорости сближения БПЛА с ВО, постоянной и флуктуационной составляющих этой скорости, флуктуационной составляющей ускорения относительного перемещения БПЛА и ВО, положения линии визирования БПЛА на ВО по азимуту и углу места, а также азимутальных и угломестных составляющих угловой скорости этой линии визирования, и распознавания варианта тактической ситуации, функционирующего в соответствии с процедурой (3)-(15) квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы.
2. Комплексирование в (6) показаний ИИС, измеряющей фазовые координаты, и индикатора тактической ситуации с моделью (19 г), включающего индикаторы сектора нахождения точки мгновенного промаха БПЛА, типа ВО, значения поперечной перегрузки ВО, и обнаружителя ослепления ИИС, соответственно с моделями (19), (19а), (19б) и (19в).
3. Учет априорных данных о смене тактической ситуации в виде условных вероятностей переходов (18 г), комплексирующих априорные данные о смене сектора нахождения точки мгновенного промаха БПЛА (18), типа ВО (18а), значения поперечной перегрузки ВО (18б), о возникновении и пропадании ослепления ИИС (18в).
4. Коррекция оценок (4), (5), (14), (15) фазовых координат, полученных на основе модели (16) и измерений (17), по оцененным вероятностям (6) возникновения соответствующего вида тактической ситуации и априорным данным (18 г) о смене этих ситуаций (адаптация фильтра к различным тактическим ситуациям - относительному положению и движению БПЛА и ВО, типу ВО, ослеплению ИИС).
5. Прогнозирование (3) вероятностей  возникновения каждого варианта тактической ситуации на один шаг дискретности вперед на основе априорных данных о смене этих вариантов, представленных соответственно начальными (21) и переходными (18в) вероятностями цепи Маркова.
возникновения каждого варианта тактической ситуации на один шаг дискретности вперед на основе априорных данных о смене этих вариантов, представленных соответственно начальными (21) и переходными (18в) вероятностями цепи Маркова.
6. Прогнозирование (4) условных математических ожиданий  фазовых координат на один шаг дискретности вперед при фиксированном варианте тактической ситуации, с учетом найденных вероятностей (3), на основе априорных данных о смене этого варианта (18 г) и альтернативных моделей динамики фазовых координат взаимного перемещения ВО и БПЛА (16).
фазовых координат на один шаг дискретности вперед при фиксированном варианте тактической ситуации, с учетом найденных вероятностей (3), на основе априорных данных о смене этого варианта (18 г) и альтернативных моделей динамики фазовых координат взаимного перемещения ВО и БПЛА (16).
7. Прогнозирование (5) условных КМ  ошибок оценивания фазовых координат на один шаг дискретности вперед при фиксированном варианте тактической ситуации, с учетом найденных вероятностей (3) и МО (4), на основе априорных данных о смене варианта тактической ситуации и альтернативных моделей динамики фазовых координат взаимного перемещения ВО и БПЛА.
ошибок оценивания фазовых координат на один шаг дискретности вперед при фиксированном варианте тактической ситуации, с учетом найденных вероятностей (3) и МО (4), на основе априорных данных о смене варианта тактической ситуации и альтернативных моделей динамики фазовых координат взаимного перемещения ВО и БПЛА.
8. Оценка (6) апостериорных вероятностей  реализации каждого варианта тактической ситуации, по степени согласованности (9)-(12) спрогнозированных вероятностей (3), математических ожиданий фазовых координат (4) и КМ (5) ошибок их оценивания с результатами измерений в (12) и комплексными показаниями индикаторов в (9).
реализации каждого варианта тактической ситуации, по степени согласованности (9)-(12) спрогнозированных вероятностей (3), математических ожиданий фазовых координат (4) и КМ (5) ошибок их оценивания с результатами измерений в (12) и комплексными показаниями индикаторов в (9).
9. Оценка (7) условных апостериорных математических ожиданий  фазовых координат взаимного перемещения ВО и БПЛА, при фиксированном варианте тактической ситуации, на основе спрогнозированных МО (4) и КМ (5) ошибок прогноза с учетом результатов измерения в (12).
фазовых координат взаимного перемещения ВО и БПЛА, при фиксированном варианте тактической ситуации, на основе спрогнозированных МО (4) и КМ (5) ошибок прогноза с учетом результатов измерения в (12).
10. Оценка (8) условных апостериорных КМ  ошибок оценивания фазовых координат, при фиксированном варианте тактической ситуации, на основе спрогнозированных МО (4) и КМ (5) ошибок прогноза с учетом результатов измерения в (12).
ошибок оценивания фазовых координат, при фиксированном варианте тактической ситуации, на основе спрогнозированных МО (4) и КМ (5) ошибок прогноза с учетом результатов измерения в (12).
11. Идентификация (13) такого  варианта тактической ситуации, для которого найденная апостериорная вероятность (6) окажется больше.
варианта тактической ситуации, для которого найденная апостериорная вероятность (6) окажется больше.
12. Нахождение (14) безусловной оценки  фазовых координат на основе апостериорных вероятностей (6) реализации каждого варианта тактической ситуации и условных апостериорных оценок (7) фазовых координат, как безусловного МО.
фазовых координат на основе апостериорных вероятностей (6) реализации каждого варианта тактической ситуации и условных апостериорных оценок (7) фазовых координат, как безусловного МО.
13. Нахождение (15) безусловной КМ  ошибок оценивания фазовых координат с учетом найденных апостериорных вероятностей (6) реализации каждого варианта тактической ситуации, условных математических ожиданий (7) фазовых координат, условных КМ (8) ошибок их оценивания и безусловных оценок (14) фазовых координат.
ошибок оценивания фазовых координат с учетом найденных апостериорных вероятностей (6) реализации каждого варианта тактической ситуации, условных математических ожиданий (7) фазовых координат, условных КМ (8) ошибок их оценивания и безусловных оценок (14) фазовых координат.
14. Совместное оценивание как параметров положения и движения по азимуту и углу места, так и одновременно параметров относительного радиального перемещения ВО и БПЛА [добавлены уравнения (22)-(26), (31), расширено уравнение (34)].
15. Оценка (36) отношения продольного промах БПЛА к поперечному.
16. Оценка (37) динамической составляющей промаха в момент окончания самонаведения.
17. Оценка (38) дисперсии промаха.
Недостатками данного способа определения мгновенного положения точки промаха БПЛА по информации угломерного канала являются:
1. Низкая достоверность распознавания варианта тактической ситуации (сектора картинной плоскости ВЦ, в котором находится точка мгновенного промаха БПЛА (радиального направления на ВО); типа ВО; значения его поперечной перегрузки; наличия ослепления РЛС БПЛА) и фильтрации фазовых координат относительного перемещения ВО и БПЛА, в том числе предполагаемого промаха, при групповом применении нескольких ЛА и БПЛА.
2. Отсутствие возможности комплексирования информации РЛС группы ЛА, их индикаторов (обнаружителей) варианта тактической ситуации и РЛС БПЛА при групповом применении нескольких ЛА и БПЛА.
3. Неэффективное использование структурной избыточности комплексной системы наблюдения «РЛС самолетов-РЛС БПЛА-индикаторы ЛА и БПЛА» при групповом применении нескольких ЛА и БПЛА, в интересах повышения надежности этой системы.
4. Неэффективное использование возможностей по повышению устойчивости комплексной системы наблюдения «РЛС самолетов-РЛС БПЛА-индикаторы ЛА и БПЛА» к срывам автосопровождения ВО при групповом применении нескольких ЛА и БПЛА.
5. Низкая степень адаптации системы комплексной обработки информации к сменам вариантов тактической ситуации.
6. Отсутствие возможности интерполяции варианта тактической ситуации и фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА» в интересах анализа эффективности группового применения нескольких ЛА и БПЛА.
Техническим результатом, на достижение которого заявлено заявленное изобретение, является повышение точности распознавания варианта тактической ситуации и фильтрации фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА» в комплексной системе наблюдения «РЛС самолетов-РЛС БПЛА-индикаторы ЛА и БПЛА».
Заявленный технический результат достигается за счет комплексирования информации при определении радиального направления БПЛА на ВО и величины предполагаемого промаха, заключающегося в том, что при сближении БПЛА в процессе самонаведения с маневрирующим ВО по методу пропорциональной навигации, с помощью информационно-измерительной системы БПЛА, включающей навигационную систему, измерители положения БПЛА относительно центра массы, РЛС и БЦВМ, формируют оценки фазовых координат, необходимые для реализации самонаведения БПЛА на ВО, до момента ослепления РЛС посредством информационно-измерительной системы реализуют измерения (1а) вектора фазовых координат (1) относительного перемещения ВО и БПЛА, при минимальных расстояниях между БПЛА и ВО, а также в момент ослепления ИИС БПЛА ее угломерный канал формирует значения положения линии визирования БПЛА на ВО по азимуту и углу места, знаки положения этой линии визирования относительно направления на ВО по азимуту и по углу места, задают (16), (1г) нижние и верхние границы секторов картинной плоскости ВО, выбранного для наведения, по соотношениям (1б), (1в) формируют вектор измерения в соответствии с выражением (2), а также показания индикатора варианта тактической ситуации в соответствии с выражением (2а), которые дополнительно при групповом применении нескольких ЛА и нескольких БПЛА, по каналу радиокоррекции передают на борт командного ЛА, одновременно с этим сформированные в соответствии с вышеописанной процедурой в каждой РЛС ЛА группы и каждой РЛС БПЛА группы вектора измерений и показания индикаторов тактической ситуации по каналам межсамолетной навигации (от ЛА) и каналам радиокоррекции (от БПЛА) передают на борт командного ЛА, где формируют вектор комплексных измерений от всех РЛС ЛА и всех РЛС БПЛА

и комплексные показания индикаторов тактической ситуации от всех РЛС ЛА и всех РЛС БПЛА

где  - измерения фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА» соответственно РЛС командного ЛА, РЛС условно j-го ЛА после командного и РЛС i-го БПЛА;
- измерения фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА» соответственно РЛС командного ЛА, РЛС условно j-го ЛА после командного и РЛС i-го БПЛА;
 - выходные показания индикаторов варианта тактической ситуации соответственно командного ЛА, условно j-го ЛА после командного и i-го БПЛА.
- выходные показания индикаторов варианта тактической ситуации соответственно командного ЛА, условно j-го ЛА после командного и i-го БПЛА.
Сформированные комплексные измерения и комплексные показания индикаторов тактической ситуации поступают на вход нового многоканального фильтра, функционирующего в соответствии с процедурой квазиоптимального совместного оценивания (экстраполяции, фильтрации и интерполяции) фазовых координат и состояния марковской структуры линейной стохастической динамической системы на основе двухмоментной параметрической аппроксимации (ДПА) нормальным законом [4-7]. Процедура совместного оценивания включает уравнения (3)-(15), дополненные следующими выражениями:
сглаживание на закрепленном интервале:
при граничных условиях:

сглаживание в закрепленной точке:
при начальных условиях:
сглаживание с постоянным запаздыванием:
при начальных условиях:
где, наряду с ранее введенными обозначениями,
для сглаживания (45)-(53) на закрепленном интервале:
k - дискретный момент времени сглаживания (распознавания);
 - дискретный момент времени окончания наблюдения;
- дискретный момент времени окончания наблюдения;
 - сглаженные на закрепленном интервале на один шаг дискретности назад соответственно вероятности реализации sk-го варианта тактической ситуации, условные математические ожидания (МО) фазовых координат при фиксированном варианте тактической ситуации, условные ковариационные матрицы (КМ) ошибок оценивания фазовых координат при фиксированном варианте тактической ситуации;
- сглаженные на закрепленном интервале на один шаг дискретности назад соответственно вероятности реализации sk-го варианта тактической ситуации, условные математические ожидания (МО) фазовых координат при фиксированном варианте тактической ситуации, условные ковариационные матрицы (КМ) ошибок оценивания фазовых координат при фиксированном варианте тактической ситуации;
 - сглаженные на закрепленном интервале соответственно оценка варианта тактической ситуации, безусловное по отношению к варианту тактической ситуации МО фазовых координат, безусловная по отношению к варианту тактической ситуации КМ ошибок оценивания фазовых координат;
- сглаженные на закрепленном интервале соответственно оценка варианта тактической ситуации, безусловное по отношению к варианту тактической ситуации МО фазовых координат, безусловная по отношению к варианту тактической ситуации КМ ошибок оценивания фазовых координат;
 - блочный вектор-строка, i-й элемент которого равен матрице
- блочный вектор-строка, i-й элемент которого равен матрице 
 - блочные диагональные матрицы, i-й элемент которых равен соответственно матрице
- блочные диагональные матрицы, i-й элемент которых равен соответственно матрице 
для сглаживания (54)-(66) в закрепленной точке:
k - дискретный момент времени (закрепленная точка) сглаживания (распознавания);
- дискретный момент времени наблюдения;
 - сглаженные в закрепленной точке соответственно вероятности реализации sk-го варианта тактической ситуации, условные МО фазовых координат при фиксированном варианте тактической ситуации, условные КМ ошибок оценивания фазовых координат при фиксированном варианте тактической ситуации;
- сглаженные в закрепленной точке соответственно вероятности реализации sk-го варианта тактической ситуации, условные МО фазовых координат при фиксированном варианте тактической ситуации, условные КМ ошибок оценивания фазовых координат при фиксированном варианте тактической ситуации;
 - сглаженные в закрепленной точке соответственно оценка варианта тактической ситуации, безусловные по отношению к варианту тактической ситуации МО фазовых координат, безусловные по отношению к варианту тактической ситуации КМ ошибок оценивания фазовых координат;
- сглаженные в закрепленной точке соответственно оценка варианта тактической ситуации, безусловные по отношению к варианту тактической ситуации МО фазовых координат, безусловные по отношению к варианту тактической ситуации КМ ошибок оценивания фазовых координат;
 - вероятность смены варианта тактической ситуации, вероятность того, что в момент времени k был реализован sk-й вариант тактической ситуации при условии, что в будущем в момент времени реализовался
- вероятность смены варианта тактической ситуации, вероятность того, что в момент времени k был реализован sk-й вариант тактической ситуации при условии, что в будущем в момент времени реализовался  вариант и известна вся история наблюдений на интервале
вариант и известна вся история наблюдений на интервале 
для сглаживания (67)-(79) с постоянным запаздыванием:
k - дискретный момент времени сглаживания с постоянным запаздыванием;
i - шаг внутреннего цикла вычислений;
m - шаг запаздывания;
(k+i) - дискретный момент времени фиксации состояния ВО;
 - сглаженные с постоянным запаздыванием соответственно вероятности реализации sk-го варианта тактической ситуации, условные МО фазовых координат при фиксированном варианте тактической ситуации, условные КМ ошибок оценивания фазовых координат при фиксированном варианте тактической ситуации;
- сглаженные с постоянным запаздыванием соответственно вероятности реализации sk-го варианта тактической ситуации, условные МО фазовых координат при фиксированном варианте тактической ситуации, условные КМ ошибок оценивания фазовых координат при фиксированном варианте тактической ситуации;
 - сглаженные с постоянным запаздыванием соответственно оценка варианта тактической ситуации, безусловное по отношению к варианту тактической ситуации МО фазовых координат, безусловная по отношению к варианту тактической ситуации КМ ошибок оценивания фазовых координат.
- сглаженные с постоянным запаздыванием соответственно оценка варианта тактической ситуации, безусловное по отношению к варианту тактической ситуации МО фазовых координат, безусловная по отношению к варианту тактической ситуации КМ ошибок оценивания фазовых координат.
Процедура совместной интерполяции основывается на априорных данных в виде ММ системы «ВО-группа ЛА-группа БПЛА-РЛС ЛА и РЛС БПЛА-индикаторы ЛА и БПЛА» со ССС, включающей:
- совокупность линейных моделей (16), (22)-(30) динамики фазовых координат относительного перемещения каждой пары «ВО-ЛА (БПЛА)» из группы «ВО-ЛА-БПЛА»;
- линейную модель измерений этих фазовых координат в РЛС командного ЛА:

- линейную модель измерений фазовых координат в РЛС условно первого в группе после командного ЛА:

- линейную модель измерений фазовых координат в РЛС второго ЛА:

- в общем случае, линейную модель измерений фазовых координат в РЛС j-го ЛА:

- линейную модель измерений фазовых координат в РЛС первого в группе БПЛА:

- линейную модель измерений фазовых координат в РЛС второго БПЛА:

- в общем случае, линейную модель измерений фазовых координат в РЛС i-го БПЛА:

- комплексную марковскую модель смены тактической ситуации (18г);
- марковскую модель индикатора тактической ситуации командного ЛА:

- марковскую модель индикатора тактической ситуации первого в группе после командного ЛА:

- марковскую модель индикатора тактической ситуации второго ЛА:

- в общем случае, марковскую модель индикатора тактической ситуации j-го ЛА:

- марковскую модель индикатора тактической ситуации первого в группе БПЛА:

- марковскую модель индикатора тактической ситуации второго БПЛА:

- в общем случае, марковскую модель индикатора тактической ситуации i-го БПЛА:

- модель неуправляемых случайных возмущений и помех (20);
- при начальных условиях (21).
Модели (80)-(86) образуют комплексную модель совместных измерений всех РЛС ЛА группы и РЛС БПЛА группы в соответствии с (17), где принимается:
при этом КМ шумов измерения принимает вид:
а матрица коэффициентов усиления в процедуре (3)-(15) формируется в соответствии с выражением:
где
diag (⋅) - обозначение диагональной матрицы;
 - соответственно в выражениях (95)-(98), блочные вектора и матрицы.
- соответственно в выражениях (95)-(98), блочные вектора и матрицы.
Модели (87)-(93) образуют комплексную модель совместных показаний индикаторов варианта тактической ситуации всех РЛС ЛА группы и РЛС БПЛА:
где
Р(⋅) - символ вероятности.
На фиг. 1 приведена схема относительного положения БПЛА и ВО в момент ослепления БРЛС, где O, Ц - соответственно центры масс БПЛА и ВО; OXYZ - связанная система координат БПЛА; VБПЛА, Vц, V - скорости соответственно БПЛА, ВО и взаимного сближения; Dц - дальность до ВО; β, ε - соответственно азимут и угол места ВО; П0 - картинная плоскость ВО, перпендикулярная продольной оси БПЛА ОХ; Р - точка промаха; 1-8 - номера секторов; ОЦ - линия визирования БПЛА на ВО; радиус круга принят равным максимально допустимому промаху БПЛА мимо объекта наведения.
На фиг. 2 показана картинная плоскость ВО, где hX - продольный промах БПЛА; hZ - поперечный промах БПЛА.
На фиг. 3 приведена блок-схема осуществления экстраполяции и фильтрации в рамках реализации способа комплексирования информации при определении направления БПЛА на ВО и величины предполагаемого промаха, где:
1 - классификатор экстраполяции;
2 - условный экстраполятор;
3 - условный дисперсиометр экстраполяции;
4 - классификатор фильтрации;
5 - условный фильтр;
6 - условный дисперсиометр фильтрации;
7 - идентификатор;
8 - безусловный фильтр;
9 - безусловный дисперсиометр фильтрации;
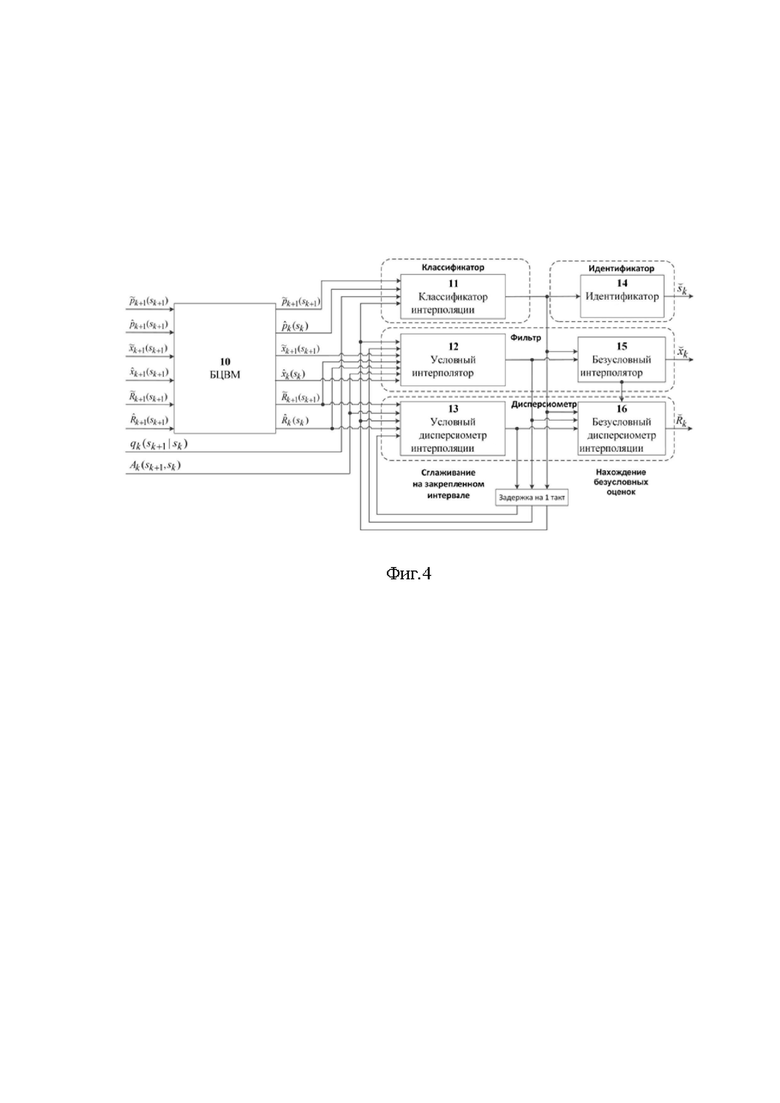
На фиг. 4 приведена блок-схема осуществления процедуры совместного оценивания при сглаживании на закрепленном интервале в рамках реализации способа комплексирования информации при определении направления БПЛА на ВО и величины предполагаемого промаха, где:
10 - БЦВМ;
11 - условный классификатор интерполяции на закрепленном интервале;
12 - условный интерполятор на закрепленном интервале;
13 - условный дисперсиометр интерполяции на закрепленном интервале;
14 - идентификатор интерполяции на закрепленном интервале;
15 - безусловный интерполятор на закрепленном интервале;
16 - безусловный дисперсиометр интерполяции на закрепленном интервале.
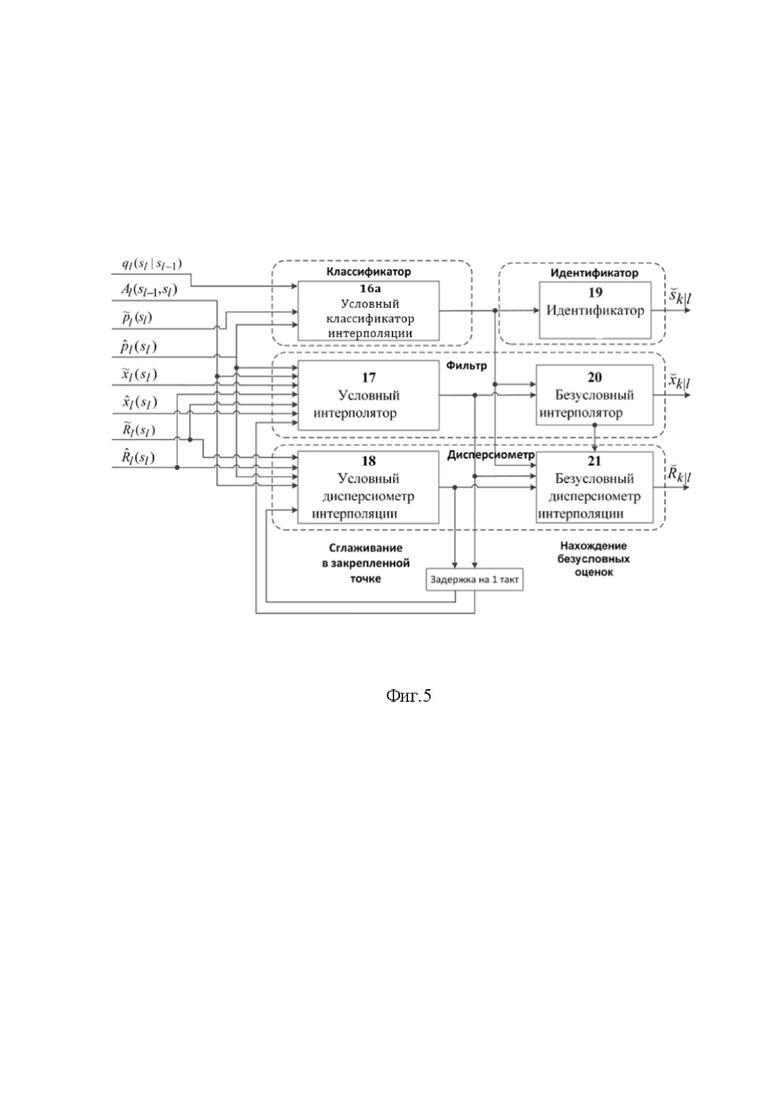
На фиг. 5 приведена блок-схема осуществления процедуры совместного оценивания при сглаживании в закрепленной точке в рамках реализации способа комплексирования информации при определении направления БПЛА на ВО и величины предполагаемого промаха, где:
16а - условный классификатор интерполяции в закрепленной точке;
17 - условный интерполятор в закрепленной точке;
18 - условный дисперсиометр интерполяции в закрепленной точке;
19 - идентификатор интерполяции в закрепленной точке;
20 - безусловный интерполятор в закрепленной точке;
21 - безусловный дисперсиометр интерполяции с постоянным запаздыванием.
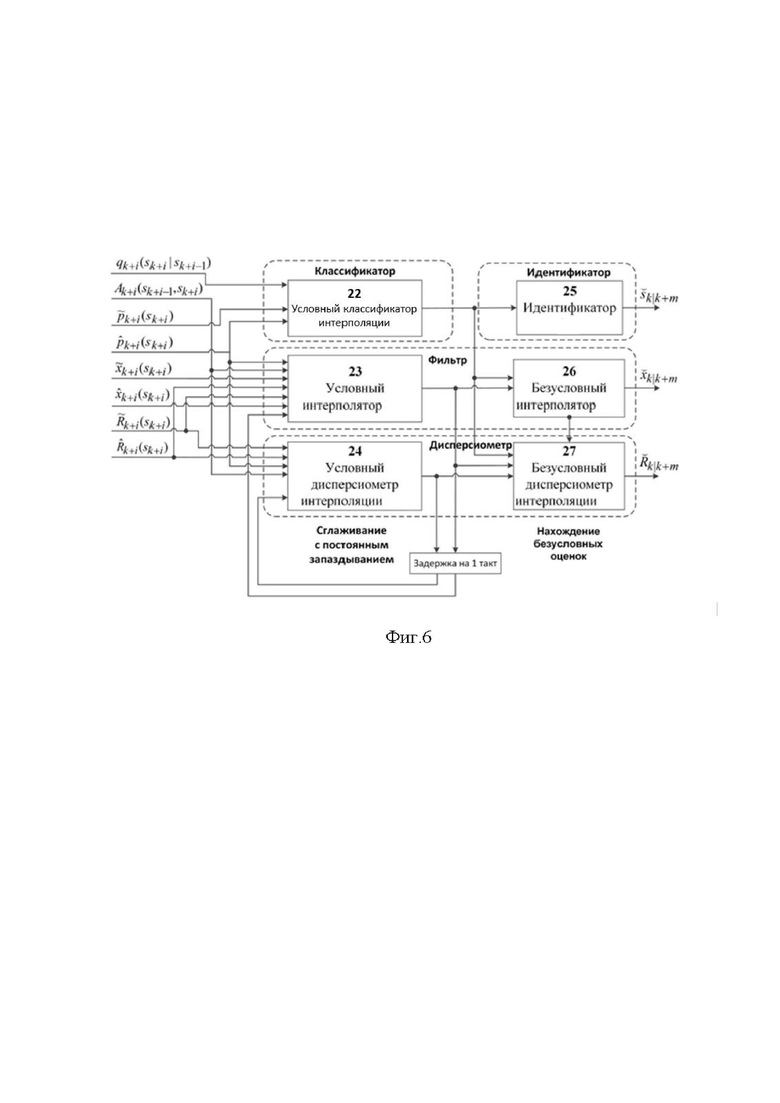
На фиг. 6 приведена блок-схема осуществления процедуры совместного оценивания при сглаживании с постоянным запаздыванием в рамках реализации способа комплексирования информации при определении направления БПЛА на ВО и величины предполагаемого промаха, где:
22 - условный классификатор интерполяции с постоянным запаздыванием;
23 - условный интерполятор с постоянным запаздыванием;
24 - условный дисперсиометр интерполяции с постоянным запаздыванием;
25 - идентификатор интерполяции с постоянным запаздыванием;
26 - безусловный интерполятор с постоянным запаздыванием;
27 - безусловный дисперсиометр интерполяции с постоянным запаздыванием.
Технический результат предлагаемого способа комплексирования информации РЛС группы ЛА и РЛС группы БПЛА при определении направления БПЛА на ВО и величины предполагаемого промаха, а именно, повышение точности распознавания варианта тактической ситуации и фильтрации фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА» в комплексной системе наблюдения «РЛС ЛА-РЛС БПЛА-индикаторы ЛА и БПЛА» достигается путем использования следующих существенных признаков:
1. Групповое применение нескольких ЛА и БПЛА.
2. Передача показаний РЛС ЛА, РЛС БПЛА и индикаторов варианта тактической ситуации от всех ЛА и всех БПЛА в составе группы по каналам межсамолетной навигации (от ЛА) и каналам радиокоррекции (от БПЛА) на борт командного ЛА.
3. Формирование (43) комплексных измерений от всех РЛС ЛА и всех РЛС БПЛА на борту командного ЛА.
4. Формирование (44) комплексных показаний от всех индикаторов варианта тактической ситуации на борту командного ЛА.
5. Применение многоканального по числу рассматриваемых вариантов тактической ситуации фильтра, функционирующего в соответствии с процедурой (3)-(15), (45)-(79) квазиоптимального совместного оценивания (экстраполяции, фильтрации и интерполяции) фазовых координат и состояния марковской структуры линейной стохастической динамической системы на основе ДПА нормальным законом по комплексным показаниям нескольких измерителей (43) и нескольких индикаторов (44).
6. Комплексирование в (6) информации РЛС группы ЛА с моделями (81)-(83), РЛС БПЛА с моделями (84)-(86) и ЛА и БПЛА индикаторов (обнаружителей) варианта тактической ситуации с моделями соответственно (87)-(90) и (91)-(93) при групповом применении нескольких ЛА и БПЛА.
7. Коррекция оценок (4), (5), (14), (15) фазовых координат, полученных на основе модели (17) и совместных измерений всех РЛС ЛА группы и РЛС БПЛА с комплексной моделью (17), (80)-(86), (94)-(98) по оцененным вероятностям (6) реализации соответствующего варианта тактической ситуации и априорным данным (18 г) о смене этих ситуаций (адаптации системы комплексной обработки информации к сменам вариантов тактической ситуации).
8. Возникновение эффекта резервирования датчиков информации в комплексной системе наблюдения «РЛС ЛА-РЛС БПЛА-индикаторы ЛА и БПЛА», заключающегося в том, что при отказе одной или нескольких РЛС ЛА, отказе одной или нескольких РЛС БПЛА, отказе одного или нескольких индикаторов варианта тактической ситуации задача сопровождения ВО и наведения на него БПЛА успешно решается с использованием оставшихся исправных датчиков информации (хотя бы одной РЛС ЛА или РЛС БПЛА).
9. Дублирование решения задачи автосопровождения ВО в нескольких следящих системах, позволяющее продолжать сопровождение ВО комплексной системой наблюдения «РЛС ЛА-РЛС БПЛА-индикаторы ЛА и БПЛА» при срыве автосопровождения в нескольких РЛС ЛА или РЛС БПЛА.
10. Решение задачи интерполяции варианта тактической ситуации и фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА» в трех постановках: на закрепленном интервале (45)-(53), в закрепленной точке (54)-(66), с постоянным запаздыванием (67)-(79).
11. Сохранение всех существенных признаков (перечисления 1-17) известного способа определения мгновенного положения точки промаха БПЛА по информации угломерного канала [1-3].
12. Решение уравнений экстраполяции (3)-(5) и фильтрации (6)-(8) в «прямом времени» с сохранением результатов в памяти БЦВМ командного ЛА для последующей интерполяции на закрепленном интервале.
13. Решение уравнений (45)-(51) сглаживания на закрепленном интервале в «обратном времени» (53) при граничных условиях (52).
14. Сглаживание (45) на закрепленном интервале вероятностей  реализации каждого варианта тактической ситуации на один шаг дискретности назад, на основе априорных данных о смене этого варианта, представленных переходными вероятностями (18г) цепи Маркова, сохраненных в памяти БЦВМ спрогнозированных (3) и апостериорных (6) вероятностей вариантов тактической ситуации и результатов предыдущего сглаживания вероятностей.
реализации каждого варианта тактической ситуации на один шаг дискретности назад, на основе априорных данных о смене этого варианта, представленных переходными вероятностями (18г) цепи Маркова, сохраненных в памяти БЦВМ спрогнозированных (3) и апостериорных (6) вероятностей вариантов тактической ситуации и результатов предыдущего сглаживания вероятностей.
15. Сглаживание (46) на закрепленном интервале условных МО  фазовых координат на один шаг дискретности назад при фиксированном варианте тактической ситуации, на основе альтернативных моделей (16) динамики фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА» и сохраненных в памяти БЦВМ спрогнозированных и апостериорных условных МО фазовых координат соответственно (4) и (7), и КМ ошибок их оценивания соответственно (5) и (8) при фиксированном варианте тактической ситуации, а также результатов предыдущего сглаживания вероятностей и условных МО.
фазовых координат на один шаг дискретности назад при фиксированном варианте тактической ситуации, на основе альтернативных моделей (16) динамики фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА» и сохраненных в памяти БЦВМ спрогнозированных и апостериорных условных МО фазовых координат соответственно (4) и (7), и КМ ошибок их оценивания соответственно (5) и (8) при фиксированном варианте тактической ситуации, а также результатов предыдущего сглаживания вероятностей и условных МО.
16. Сглаживание (48) на закрепленном интервале условных КМ  ошибок оценивания фазовых координат на один шаг дискретности назад при фиксированном варианте тактической ситуации, на основе альтернативных моделей (16) динамики фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА» и сохраненных в памяти БЦВМ спрогнозированных и апостериорных условных КМ ошибок оценивания фазовых координат соответственно (5) и (8) при фиксированном варианте тактической ситуации, а также результатов предыдущего сглаживания вероятностей и условных КМ.
ошибок оценивания фазовых координат на один шаг дискретности назад при фиксированном варианте тактической ситуации, на основе альтернативных моделей (16) динамики фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА» и сохраненных в памяти БЦВМ спрогнозированных и апостериорных условных КМ ошибок оценивания фазовых координат соответственно (5) и (8) при фиксированном варианте тактической ситуации, а также результатов предыдущего сглаживания вероятностей и условных КМ.
17. Идентификация (49) такого сглаженного на закрепленном интервале варианта  тактической ситуации, для которого найденная интерполированная вероятность (45) окажется больше.
тактической ситуации, для которого найденная интерполированная вероятность (45) окажется больше.
18. Нахождение (50) безусловной сглаженной на закрепленном интервале оценки  фазовых координат на основе интерполированных вероятностей (45) реализации каждого варианта тактической ситуации и условных интерполированных оценок (46) фазовых координат, как безусловного МО.
фазовых координат на основе интерполированных вероятностей (45) реализации каждого варианта тактической ситуации и условных интерполированных оценок (46) фазовых координат, как безусловного МО.
19. Нахождение (51) безусловной сглаженной на закрепленном интервале КМ  ошибок оценивания фазовых координат с учетом найденных интерполированных вероятностей (45) реализации каждого варианта тактической ситуации, условных МО (46) фазовых координат, условных КМ (48) ошибок их оценивания и безусловных оценок (50) фазовых координат.
ошибок оценивания фазовых координат с учетом найденных интерполированных вероятностей (45) реализации каждого варианта тактической ситуации, условных МО (46) фазовых координат, условных КМ (48) ошибок их оценивания и безусловных оценок (50) фазовых координат.
20. Решение уравнений (54)-(62) сглаживания в закрепленной точке в «прямом времени» (66) при начальных условиях (63)-(65) (фиг.5).
21. Сглаживание (54) в закрепленной точке вероятностей  реализации каждого варианта тактической ситуации, на основе апостериорных вероятностей (6), полученных для момента окончания наблюдения, и вероятности (55) смены варианта тактической ситуации с момента окончания наблюдения до закрепленной точки.
реализации каждого варианта тактической ситуации, на основе апостериорных вероятностей (6), полученных для момента окончания наблюдения, и вероятности (55) смены варианта тактической ситуации с момента окончания наблюдения до закрепленной точки.
22. Сглаживание (56)в закрепленной точке условных МО  фазовых координат при фиксированном варианте тактической ситуации, на основе апостериорных вероятностей (6), альтернативных моделей (16) динамики фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА», спрогнозированных и апостериорных условных МО фазовых координат соответственно (4) и (7), и КМ ошибок их оценивания соответственно (5) и (8) при фиксированном варианте тактической ситуации, а также результатов предыдущего сглаживания условных МО.
фазовых координат при фиксированном варианте тактической ситуации, на основе апостериорных вероятностей (6), альтернативных моделей (16) динамики фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА», спрогнозированных и апостериорных условных МО фазовых координат соответственно (4) и (7), и КМ ошибок их оценивания соответственно (5) и (8) при фиксированном варианте тактической ситуации, а также результатов предыдущего сглаживания условных МО.
23. Сглаживание (59) в закрепленной точке условных КМ  ошибок оценивания фазовых координат при фиксированном варианте тактической ситуации, на основе апостериорных вероятностей (6), альтернативных моделей (16) динамики фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА», спрогнозированных и апостериорных условных КМ ошибок оценивания фазовых координат соответственно (5) и (8) при фиксированном варианте тактической ситуации, а также результатов предыдущего сглаживания условных КМ.
ошибок оценивания фазовых координат при фиксированном варианте тактической ситуации, на основе апостериорных вероятностей (6), альтернативных моделей (16) динамики фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА», спрогнозированных и апостериорных условных КМ ошибок оценивания фазовых координат соответственно (5) и (8) при фиксированном варианте тактической ситуации, а также результатов предыдущего сглаживания условных КМ.
24. Идентификация (60) такого сглаженного в закрепленной точке варианта  тактической ситуации, для которого найденная интерполированная вероятность (54) окажется больше.
тактической ситуации, для которого найденная интерполированная вероятность (54) окажется больше.
25. Нахождение (62) безусловной сглаженной в закрепленной точке оценки  фазовых координат на основе интерполированных вероятностей (54) реализации каждого варианта тактической ситуации и условных интерполированных оценок (56)фазовых координат, как безусловного МО.
фазовых координат на основе интерполированных вероятностей (54) реализации каждого варианта тактической ситуации и условных интерполированных оценок (56)фазовых координат, как безусловного МО.
26. Нахождение (62) безусловной сглаженной в закрепленной точке КМ  ошибок оценивания фазовых координат с учетом найденных интерполированных вероятностей (54) реализации каждого варианта тактической ситуации, условных МО (56)фазовых координат, условных КМ (59) ошибок их оценивания и безусловных оценок (61) фазовых координат.
ошибок оценивания фазовых координат с учетом найденных интерполированных вероятностей (54) реализации каждого варианта тактической ситуации, условных МО (56)фазовых координат, условных КМ (59) ошибок их оценивания и безусловных оценок (61) фазовых координат.
27. Решение уравнений (67)-(75) сглаживания с постоянным запаздыванием в «прямом времени» (79) при начальных условиях (76)-(78) (фиг. 6).
28. Формальное совпадение существенных признаков сглаживания с постоянным запаздыванием (67)-(78) с соответствующими существенными признаками (перечисления 21-26) сглаживания в закрепленной точке (54)-(66), если принять к переменной величиной, положить k=0, 1, 2, …;  m=const и учесть, что на каждом шаге счета к организуется внутренний цикл счета по переменной i=1, 2, …, m.
m=const и учесть, что на каждом шаге счета к организуется внутренний цикл счета по переменной i=1, 2, …, m.
Существенный признак перечисления 11 является сходным с прототипом [1]. Существенные признаки перечислений 1-10, 12-28 являются новыми, отличающимися от прототипа [1], и в известных технических решениях не обнаружены.
Результаты сравнительного моделирования предлагаемого способа комплексирования информации РЛС группы ЛА и РЛС БПЛА при определении направления на ВО и величины предполагаемого промаха и известного способа определения мгновенного положения точки промаха БПЛА по информации угломерного канала [1-3] свидетельствуют с доверительной вероятностью 0,99 о снижении среднеквадратического отклонения ошибки (СКО) фильтрации на 16±0,1%, о повышении вероятности правильного распознавания варианта тактической ситуации на 10±0,1%, о повышении вероятности безотказной работы комплексной системы наблюдения «РЛС ЛА-РЛС БПЛА-индикаторы ЛА и БПЛА» на 17±0,1%, о снижении вероятности срыва автосопровождения ВО в этой системе на 14±0,1%, о снижении СКО ошибки оценивания после интерполяции по сравнению с СКО ошибки фильтрации на 7±0,1% и о повышении вероятности правильного распознавания варианта тактической ситуации после интерполяции на 5±0,1%.
Таким образом, применение предлагаемого изобретения позволит повысить точность распознавания варианта тактической ситуации и фильтрации фазовых координат относительного перемещения группы «ВО-ЛА-БПЛА», в комплексной системе наблюдения «РЛС ЛА-РЛС БПЛА-индикаторы ЛА и БПЛА», повысить надежность и устойчивость к срывам автосопровождения этой системы наблюдения путем комплексирования информации нескольких РЛС группы ЛА, нескольких РЛС БПЛА и нескольких индикаторов (обнаружителей) варианта тактической ситуации, повысить степень адаптации системы комплексной обработки информации к сменам вариантов тактической ситуации, а также решить задачу достоверной интерполяции варианта тактической ситуации и фазовых координат с помощью показаний комплексной системы наблюдения.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент РФ на изобретение №2721623 от 21.05.2020. Способ определения мгновенного положения точки промаха беспилотного летательного аппарата по информации угломерного канала / Себряков Г.Г., Павлов В.И., Мужичек С.М., Ермолин О.В., Скрынников А.А.; заявитель и патентообладатель Федеральное государственное унитарное предприятие «Государственный научно-исследовательский институт авиационных систем» (ФГУП «ГосНИИАС») (RU).
2. Метод определения мгновенного положения точки промаха беспилотного летательного аппарата по информации угломерного канала / С.М. Мужичек, А.Ю. Федотов, М.И. Хлопков, А.О. Попов // Сборник научно-методических трудов V Всероссийской научно-практической конференции. - Москва: МГТУ им. Н.Э. Баумана, 2020. - С.253-262.
3. Определение мгновенного положения точки промаха беспилотного летательного аппарата по информации угломерного канала / Себряков Г.Г., Мужичек С.М., Скрынников А.А., Павлов В.П., Ермолин О.В. // Вестник компьютерных и информационных технологий. 2017. №5. С.23-27.
4. Бухалев, В.А. Распознавание, оценивание и управление в системах со случайной скачкообразной структурой / В.А. Бухалев. - М.: ФИЗМАТЛИТ, 1996. - 283 с.
5. Бухалев, В.А. Оптимальное сглаживание в системах со случайной скачкообразной структурой / В.А. Бухалев. - М.: ФИЗМАТЛИТ, 2013. - 187 с.
6. Бухалев, В.А. Алгоритмическая помехазащита беспилотных летательных аппаратов / В.А. Бухалев, А.А. Скрынников, В.А. Болдинов. - М.: ФИЗМАТЛИТ, 2018. - 192 с.
7. Метод распознавания в бортовой радиолокационной станции истребителя состояния групповой воздушной цели на основе теории систем со случайной скачкообразной структурой: монография / А.А. Филонов [и др.]; рук. авт. коллектива А.Ю. Федотов. - М.: ИД Академии Жуковского, 2019. - 309 с.
8. Авиационные системы радиоуправления. Т. 1. Принципы построения систем управления. Основы синтеза и анализа / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2003. - 192 с.
9. Авиационные системы радиоуправления. Т. 2. Радиоэлектронные системы самонаведения / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2003. - 390 с.
10. Казаков И.Е., Гладков Д.И., Криксунов Л.3., Харитонов А.П. Системы управления и динамика наведения ракет / Под ред. И.Е. Казакова. - М.: ВВИА им. Н.Е. Жуковского, 1973. - 498 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения мгновенного положения точки промаха беспилотного летательного аппарата по информации угломерного канала | 2019 |
|
RU2721623C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| Способ распознавания варианта наведения подвижного объекта на один из летательных аппаратов группы | 2019 |
|
RU2713212C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2020 |
|
RU2764781C1 |
| Способ комплексирования информации радиолокационной станции и радиолокационных головок самонаведения ракет, пущенных носителем по воздушной цели при воздействии уводящих по дальности и скорости помех | 2021 |
|
RU2765145C1 |
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОЙ НАГРУЗКИ НА ВОЗДУШНЫЙ ОБЪЕКТ | 2022 |
|
RU2784492C1 |
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОЙ НАГРУЗКИ НА ВОЗДУШНЫЙ ОБЪЕКТ | 2023 |
|
RU2804765C1 |
| Способ сопровождения в радиолокационной станции воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2019 |
|
RU2713635C1 |
| Способ распознавания функционального назначения летательных аппаратов пары по принципу "ведущий-ведомый" | 2019 |
|
RU2726869C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
Изобретение относится к области цифровой обработки сигналов и может быть использовано в бортовых цифровых вычислительных машинах (БЦВМ) пилотируемых летательных аппаратов (ЛА) и беспилотных летательных аппаратов (БПЛА) при их самонаведении на воздушный объект (ВО) по информации от нескольких радиолокационных станций (РЛС) ЛА, нескольких РЛС БПЛА и нескольких индикаторов варианта тактической ситуации в условиях группового применения ЛА и БПЛА. Техническим результатом является повышение точности распознавания варианта тактической ситуации и фильтрации фазовых координат относительного перемещения группы «ВО - ЛА - БПЛА» в комплексной системе наблюдения «РЛС ЛА - РЛС БПЛА - индикаторы ЛА и БПЛА». Способ заключается в совместном оценивании фазовых координат относительного перемещения группы «ВО - ЛА - БПЛА» и варианта тактической ситуации при комплексировании информации нескольких РЛС группы ЛА, нескольких РЛС БПЛА и нескольких индикаторов варианта тактической ситуации, на основе передачи по каналам межсамолетной навигации от ЛА и каналам радиокоррекции от БПЛА на борт командного ЛА сформированных в каждой РЛС ЛА группы и каждой РЛС БПЛА измерений фазовых координат и показания индикаторов варианта тактической ситуации, обработки комплексных измерений и комплексных показаний индикаторов варианта тактической ситуации в многоканальном фильтре, функционирующего в соответствии с процедурой квазиоптимального совместного оценивания фазовых координат и состояния марковской структуры линейной стохастической динамической системы, работающего на основе априорных данных в виде математической модели (ММ) системы «ВО - группа ЛА - группа БПЛА - РЛС ЛА и РЛС БПЛА - индикаторы ЛА и БПЛА» со случайной скачкообразной структурой (ССС), включающей совокупность линейных моделей динамики фазовых координат относительного перемещения каждой пары «ВО - ЛА (БПЛА)», совокупность линейных моделей измерений фазовых координат в РЛС каждого ЛА из состава группы, совокупность линейных моделей измерений фазовых координат в РЛС каждого БПЛА из состава группы, комплексную марковскую модель смены варианта тактической ситуации, совокупность марковских моделей индикаторов варианта тактической ситуации каждого ЛА из состава группы, совокупность марковских моделей индикаторов варианта тактической ситуации каждого БПЛА из состава группы, модель неуправляемых случайных возмущений и помех, при начальных условиях, и на выходе которого формируются отфильтрованные и сглаженные оценки варианта тактической ситуации, безусловных МО фазовых координат и КМ ошибок их оценивания. 6 ил.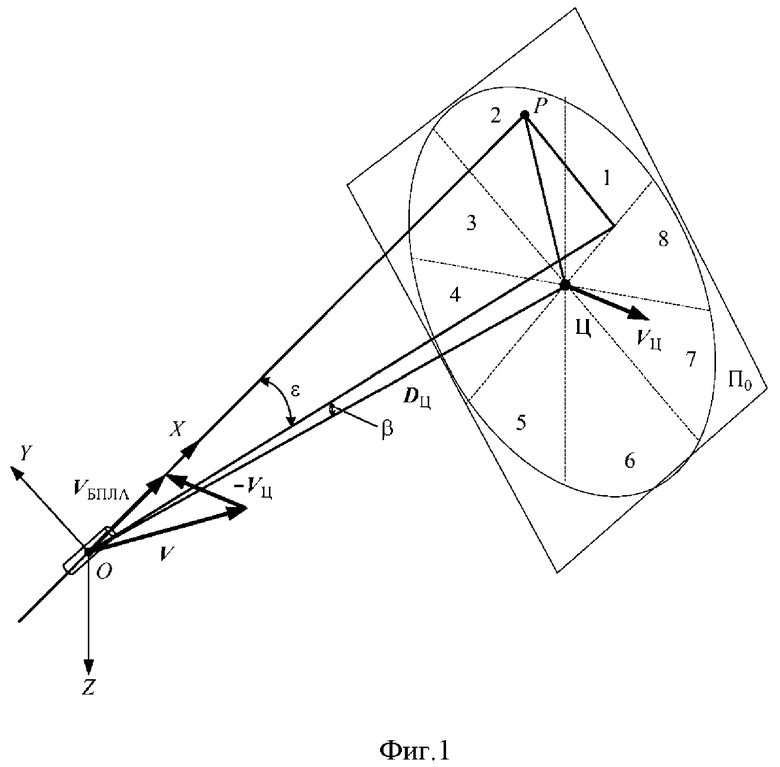
Способ комплексирования информации при определении направления беспилотного летательного аппарата (БПЛА) на воздушный объект (ВО) и величины предполагаемого промаха, заключающийся в том, что при сближении БПЛА в процессе самонаведения с маневрирующим ВО по методу пропорциональной навигации, с помощью информационно-измерительной системы (ИИС) БПЛА, включающей навигационную систему, измерители положения БПЛА относительно центра массы, радиолокационную станцию (РЛС) и бортовую цифровую вычислительную машину (БЦВМ), формируют оценки фазовых координат, необходимые для реализации самонаведения БПЛА на ВО до момента ослепления РЛС, посредством ИИС БПЛА реализуют измерения вектора фазовых координат относительного перемещения ВО и БПЛА, при минимальных расстояниях между БПЛА и ВО, а также в момент ослепления ИИС БПЛА, ее угломерный канал формирует значения положения линии визирования БПЛА на ВО по азимуту и углу места, знаки положения этой линии визирования относительно направления на ВО по азимуту и по углу места, задают нижние и верхние границы секторов картинной плоскости ВО, выбранного для наведения, формируют вектор измерения и показания индикатора варианта тактической ситуации, отличающийся тем, что сформированные измерения и показания индикатора тактической ситуации при групповом применении нескольких летательных аппаратов (ЛА) и нескольких БПЛА, по каналу радиокоррекции передают на борт командного ЛА, одновременно с этим сформированные в каждой РЛС ЛА из состава группы и каждой РЛС БПЛА из состава группы вектора измерений и показания индикаторов варианта тактической ситуации по каналам межсамолетной навигации (от ЛА) и каналам радиокоррекции (от БПЛА) передают на борт командного ЛА, где формируют вектор комплексных измерений от всех РЛС ЛА и всех РЛС БПЛА и комплексные показания индикаторов варианта тактической ситуации от всех РЛС ЛА и всех РЛС БПЛА, сформированные комплексные измерения и комплексные показания индикаторов варианта тактической ситуации поступают на вход многоканального фильтра, функционирующего в соответствии с процедурой квазиоптимального совместного оценивания фазовых координат и состояния марковской структуры линейной стохастической динамической системы на основе двухмоментной параметрической аппроксимации (ДПА) нормальным законом, процедурой совместного оценивания, основанной на априорных данных в виде математической модели (ММ) системы «ВО – группа ЛА – группа БПЛА – РЛС ЛА и РЛС БПЛА – индикаторы ЛА и БПЛА» со случайной скачкообразной структурой (ССС), включающей совокупность линейных моделей динамики фазовых координат относительного перемещения каждой пары «ВО – ЛА (БПЛА)», совокупность линейных моделей измерений фазовых координат в РЛС каждого ЛА из состава группы, совокупность линейных моделей измерений фазовых координат в РЛС каждого БПЛА из состава группы, комплексную марковскую модель смены варианта тактической ситуации, совокупность марковских моделей индикаторов варианта тактической ситуации каждого ЛА из состава группы, совокупность марковских моделей индикаторов варианта тактической ситуации каждого БПЛА из состава группы, модель неуправляемых случайных возмущений и помех, при начальных условиях, совокупности моделей измерений фазовых координат образуют комплексную модель совместных измерений всех РЛС ЛА группы и РЛС БПЛА группы, совокупности моделей индикаторов варианта тактической ситуации образуют комплексную модель совместных показаний индикаторов варианта тактической ситуации всех РЛС ЛА группы и РЛС БПЛА группы, осуществляют решение задачи интерполяции варианта тактической ситуации и фазовых координат относительного перемещения группы «ВО – ЛА – БПЛА» в трех постановках: на закрепленном интервале, в закрепленной точке, с постоянным запаздыванием, решают уравнения экстраполяции и фильтрации в «прямом времени» с сохранением результатов в памяти БЦВМ командного ЛА для последующей интерполяции на закрепленном интервале, решают уравнения сглаживания на закрепленном интервале в «обратном времени» при граничных условиях, осуществляют сглаживание на закрепленном интервале вероятностей реализации каждого варианта тактической ситуации на один шаг дискретности назад, на основе априорных данных о смене этого варианта, представленных переходными вероятностями цепи Маркова, сохраненных в памяти БЦВМ спрогнозированных и апостериорных вероятностей вариантов тактической ситуации и результатов предыдущего сглаживания вероятностей, осуществляют сглаживание на закрепленном интервале условных математических ожиданий (МО) фазовых координат на один шаг дискретности назад при фиксированном варианте тактической ситуации, на основе альтернативных моделей динамики фазовых координат относительного перемещения группы «ВО – ЛА – БПЛА» и сохраненных в памяти БЦВМ спрогнозированных и апостериорных условных МО фазовых координат и ковариационных матриц (КМ) ошибок их оценивания при фиксированном варианте тактической ситуации, а также результатов предыдущего сглаживания вероятностей и условных МО, осуществляют сглаживание на закрепленном интервале условных КМ ошибок оценивания фазовых координат на один шаг дискретности назад при фиксированном варианте тактической ситуации, на основе альтернативных моделей динамики фазовых координат относительного перемещения группы «ВО – ЛА – БПЛА» и сохраненных в памяти БЦВМ спрогнозированных и апостериорных условных КМ ошибок оценивания фазовых координат при фиксированном варианте тактической ситуации, а также результатов предыдущего сглаживания вероятностей и условных КМ, осуществляют идентификацию такого сглаженного на закрепленном интервале варианта тактической ситуации, для которого найденная интерполированная вероятность окажется больше, находят безусловные сглаженные на закрепленном интервале оценки фазовых координат на основе интерполированных вероятностей реализации каждого варианта тактической ситуации и условных интерполированных оценок фазовых координат, как безусловного МО, определяют безусловную сглаженную на закрепленном интервале КМ ошибок оценивания фазовых координат с учетом найденных интерполированных вероятностей реализации каждого варианта тактической ситуации, условных МО фазовых координат, условных КМ ошибок их оценивания и безусловных оценок фазовых координат, решают уравнения сглаживания в закрепленной точке в «прямом времени» при начальных условиях, осуществляют сглаживание в закрепленной точке вероятностей реализации каждого варианта тактической ситуации, на основе апостериорных вероятностей, полученных для момента окончания наблюдения, и вероятности смены варианта тактической ситуации с момента окончания наблюдения до закрепленной точки, осуществляют сглаживание в закрепленной точке условных МО фазовых координат при фиксированном варианте тактической ситуации, на основе апостериорных вероятностей, альтернативных моделей динамики фазовых координат относительного перемещения группы «ВО – ЛА – БПЛА», спрогнозированных и апостериорных условных МО фазовых координат и КМ ошибок их оценивания при фиксированном варианте тактической ситуации, а также результатов предыдущего сглаживания условных МО, осуществляют сглаживание в закрепленной точке условных КМ ошибок оценивания фазовых координат при фиксированном варианте тактической ситуации, на основе апостериорных вероятностей, альтернативных моделей динамики фазовых координат относительного перемещения группы «ВО – ЛА – БПЛА», спрогнозированных и апостериорных условных КМ ошибок оценивания фазовых координат при фиксированном варианте тактической ситуации, а также результатов предыдущего сглаживания условных КМ, осуществляют идентификацию такого сглаженного в закрепленной точке варианта тактической ситуации, для которого найденная интерполированная вероятность окажется больше, находят безусловные сглаженные в закрепленной точке оценки фазовых координат на основе интерполированных вероятностей реализации каждого варианта тактической ситуации и условных интерполированных оценок фазовых координат, как безусловного МО, находят безусловные сглаженные в закрепленной точке КМ ошибок оценивания фазовых координат с учетом найденных интерполированных вероятностей реализации каждого варианта тактической ситуации, условных МО фазовых координат, условных КМ ошибок их оценивания и безусловных оценок фазовых координат, решают уравнения сглаживания с постоянным запаздыванием в «прямом времени», формально совпадающих с уравнениями сглаживания в закрепленной точке, если принять момент интерполяции переменной величиной и учесть, что на каждом шаге счета организуется внутренний цикл счета, при начальных условиях.
| Способ определения мгновенного положения точки промаха беспилотного летательного аппарата по информации угломерного канала | 2019 |
|
RU2721623C1 |
| МУЖИЧЕК С.М., ФЕДОТОВ А.Ю., ХЛОПКОВ М.И., ПОПОВ А.О | |||
| Метод определения мгновенного положения точки промаха беспилотного летательного аппарата по информации угломерного канала // Сборник научно-методических трудов V Всероссийской научно-практической конференции | |||
| М.: МГТУ им | |||
| Н.Э | |||
| Баумана, 2020 | |||
| Прибор для измерения угла наклона | 1921 |
|
SU253A1 |
| Способ управления группой беспилотных летательных аппаратов с учетом степени опасности окружающих объектов | 2019 |
|
RU2728197C1 |

