[Область техники]
[0001]
Настоящее изобретение относится к способу управления парковкой и оборудованию управления парковкой.
[Уровень техники]
[0002]
Известна технология, которая позволяет транспортному средству перемещаться, чтобы следовать за перемещением портативного устройства, сохраняя при этом взаимное расположение с портативным устройством (патентный документ 1).
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный документ 1] JP5984745B
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
Транспортное средство постоянно следует за перемещением портативного устройства при перемещении портативного устройства, и поэтому пользователь может испытывать беспокойство по поводу операции в месте, в котором транспортному средству трудно двигаться, или в других подобных местах.
[0005]
Задача, решаемая настоящим изобретением, состоит в том, чтобы парковать транспортное средство с помощью инструкции управления с диапазоном управления, который уменьшает беспокойство оператора, который выполняет операцию удаленной парковки.
[Средство для решения проблем]
[0006]
Настоящее изобретение решает вышеупомянутую проблему посредством того, что, когда уровень беспокойства оператора, вычисленный по перемещению оператора, меньше предварительно определенного порогового значения, осуществляют парковку транспортного средства в соответствии с первой инструкцией управления, которая предварительно задана в инструкции управления, в то время как, когда уровень беспокойства не меньше предварительно определенного порогового значения, вычисляют вторую инструкцию управления, полученную путем ограничения диапазона управления первой инструкции управления, и осуществляют парковку транспортного средства в соответствии со второй инструкцией управления.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению транспортное средство может быть припарковано с помощью инструкции управления с диапазоном управления, который уменьшает беспокойство оператора, который выполняет операцию удаленной парковки.
[Краткое описание чертежей]
[0008]
Фиг. 1 – блок–схема, иллюстрирующая пример системы управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг. 2А – изображение для описания первой схемы обнаружения положения оператора.
Фиг. 2B – изображение для описания второй схемы обнаружения положения оператора.
Фиг. 2C – изображение для описания третьей схемы обнаружения положения оператора.
Фиг. 2D – изображение для описания четвертой схемы обнаружения положения оператора.
Фиг. 3А – изображение для описания первой схемы обнаружения препятствия.
Фиг. 3B – изображение для описания второй схемы обнаружения препятствия.
Фиг. 4 – блок–схема последовательности операций, иллюстрирующая пример процедуры управления, выполняемой системой управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг. 5 иллюстрирует схему расчета уровня беспокойства оператора.
Фиг. 6 – изображение, иллюстрирующее взаимосвязь между перемещением оператора и уровнем беспокойства.
Фиг. 7А – изображение, иллюстрирующее взаимосвязь между величиной MD перемещения оператора и уровнем AX беспокойства.
Фиг. 7B – изображение, иллюстрирующее взаимосвязь между скоростью MV перемещения оператора и уровнем AX беспокойства.
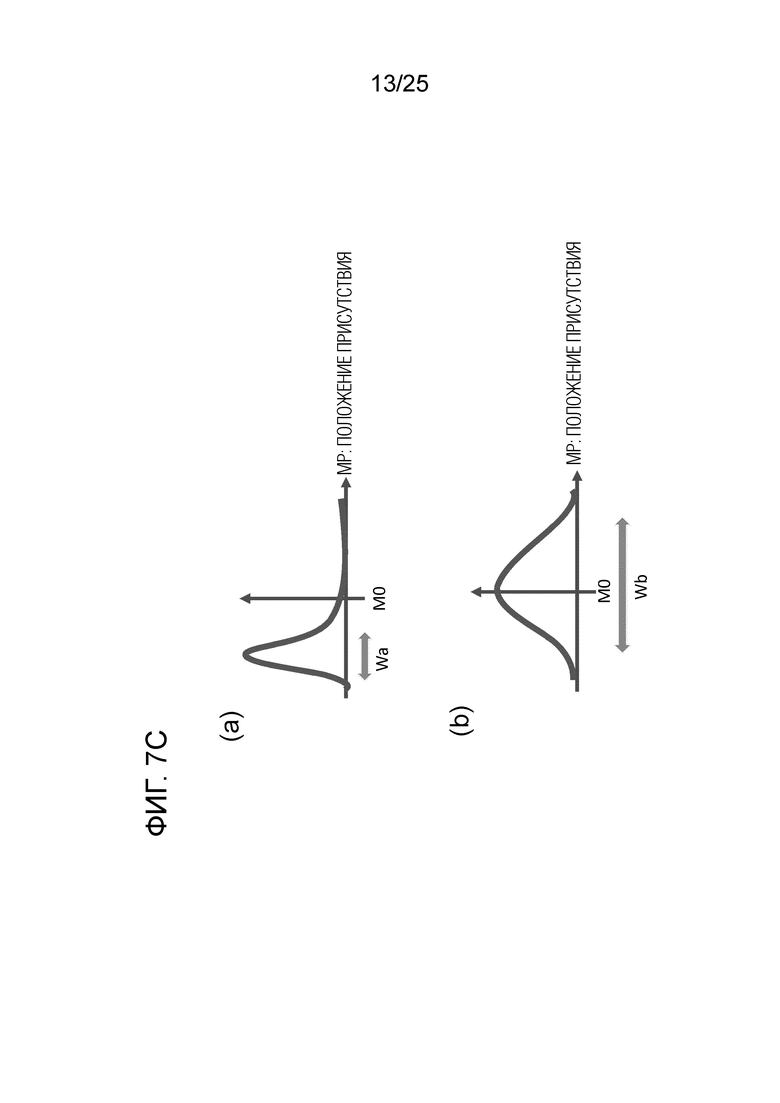
Фиг. 7C - набор изображений (a) и (b), каждое из которых иллюстрирует распределение положения MP перемещения оператора.
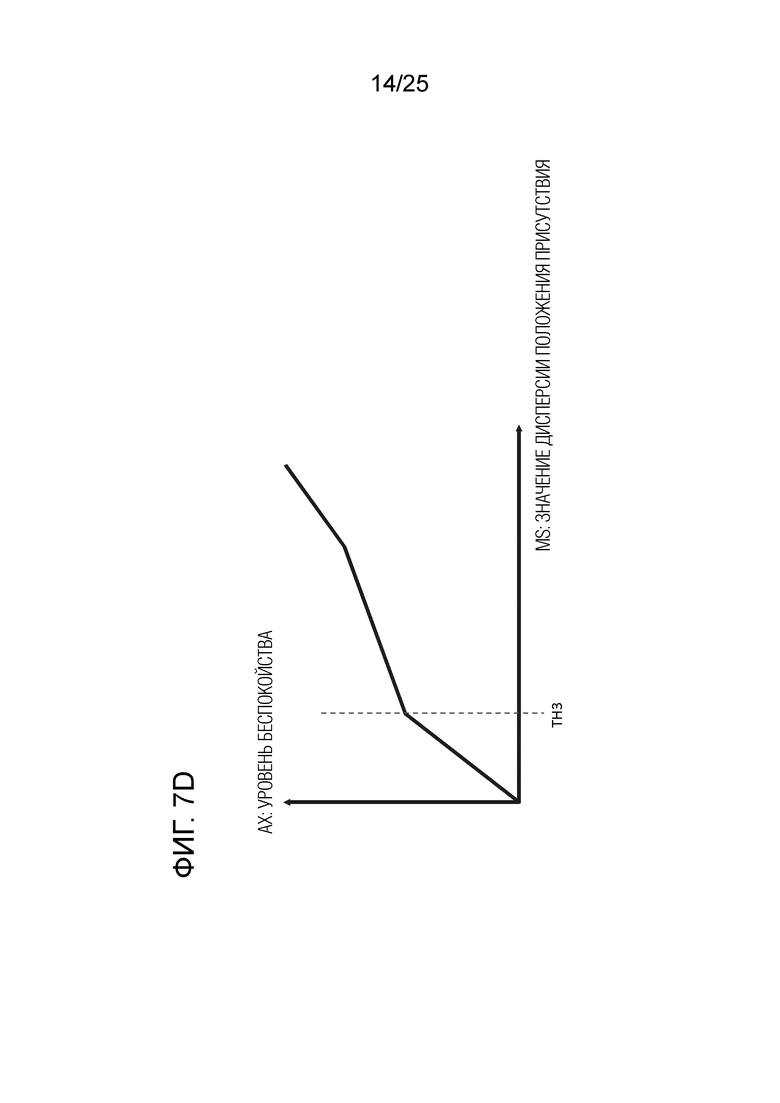
Фиг. 7D – изображение, иллюстрирующее взаимосвязь положения перемещения оператора со значением MS дисперсии.
Фиг. 8А – изображение, иллюстрирующее пример диапазона управления процесса вычисления маршрута парковки.
Фиг. 8B – изображение, иллюстрирующее взаимосвязь между уровнем AX беспокойства и расстоянием OBD запаса маршрута парковки.
Фиг. 9А – изображение, иллюстрирующее пример диапазона управления процесса вычисления инструкции управления.
Фиг. 9B – изображение, иллюстрирующее взаимосвязь между уровнем AX беспокойства и верхней предельной скоростью VM.
Фиг. 10А – изображение, иллюстрирующее первый пример инструкции управления относительно скорости.
Фиг. 10B – изображение, иллюстрирующее второй пример инструкции управления относительно скорости.
Фиг. 11А – изображение, иллюстрирующее первый пример инструкции управления относительно угла поворота рулевого колеса.
Фиг. 11B – изображение, иллюстрирующее второй пример инструкции управления относительно угла поворота рулевого колеса.
Фиг. 12 - изображение, иллюстрирующее пример диапазона управления процесса представления меню операций.
Фиг. 13А – изображение, иллюстрирующее первый пример инструкции управления относительно меню операций.
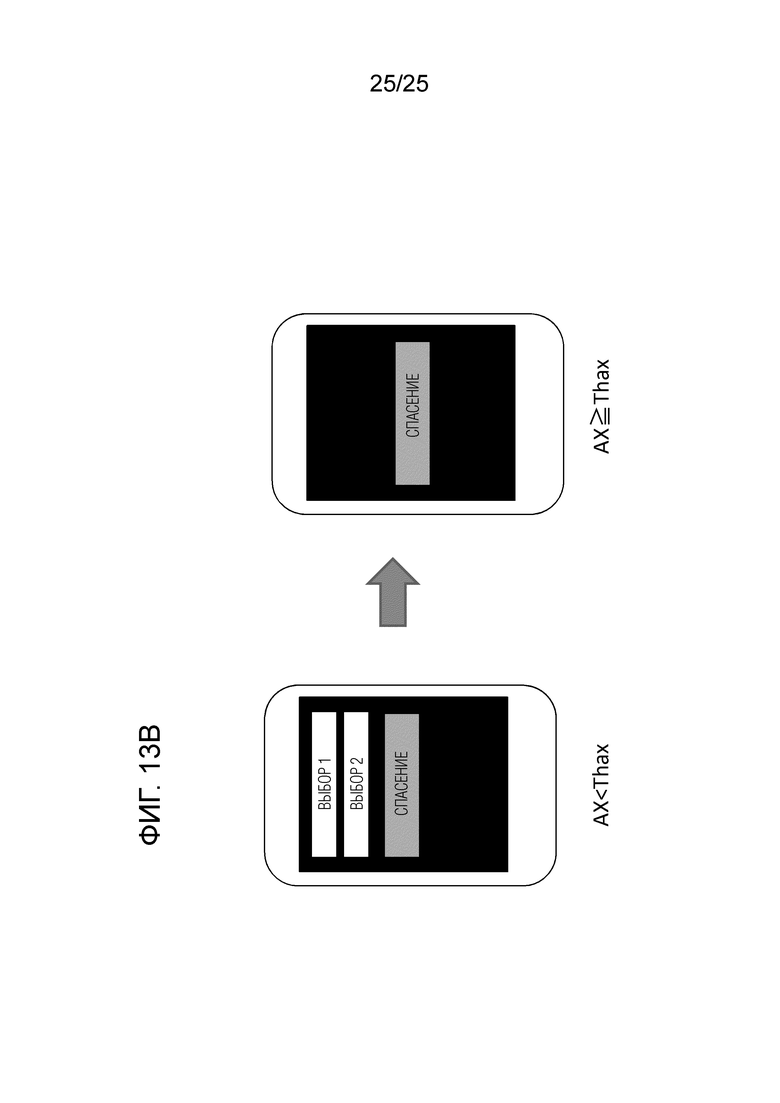
Фиг. 13B – изображение, иллюстрирующее второй пример инструкции управления относительно меню операций.
[Вариант(ы) осуществления настоящего изобретения]
[0009]
Далее один или несколько вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи.
В вариантах осуществления настоящее изобретение будет описано посредством примера случая, в котором оборудование управления парковкой согласно настоящему изобретению применяется к системе управления парковкой. Оборудование управления парковкой также может быть применено к портативному операционному терминалу (техническое средство, такое как смартфон или КПК: Персональный цифровой помощник), способному обмениваться информацией с бортовым оборудованием. Способ управления парковкой в соответствии с настоящим изобретением может использоваться в оборудовании управления парковкой, которое будет описано ниже.
[0010]
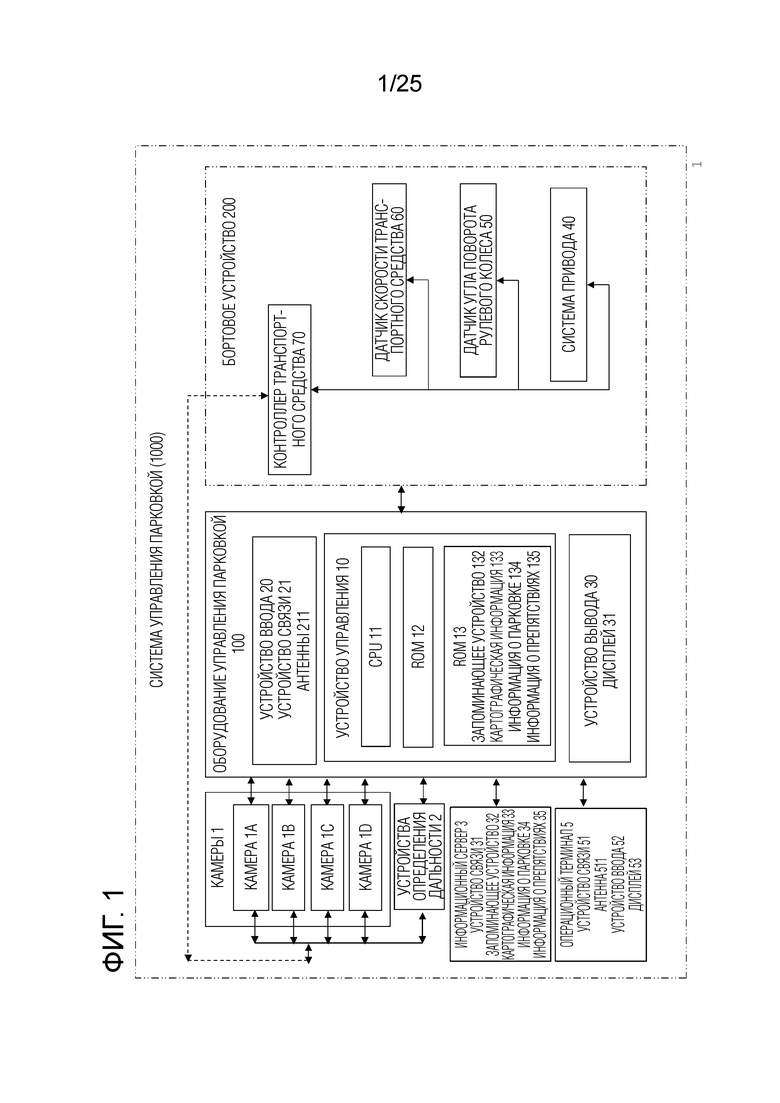
Фиг. 1 - блок–схема системы 1000 управления парковкой, включающей в себя оборудование 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Система 1000 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя камеры 1a–1d, устройства 2 определения дальности, информационный сервер 3, операционный терминал 5, оборудование 100 управления парковкой, контроллер 70 транспортного средства, систему 40 привода, датчик 50 угла поворота рулевого колеса и датчик 60 скорости транспортного средства. Оборудование 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения функционирует с возможностью управления операцией перемещения (парковки) транспортного средства V в качестве цели управления парковкой в парковочное место на основе команды операции, которая вводится из операционного терминала 5.
[0011]
Операционный терминал 5 представляет собой портативный компьютер, который может быть вынесен наружу из транспортного средства V и имеет функцию ввода и функцию связи. Операционный терминал 5 принимает ввод команды операции, выполняемый оператором M для управления вождением (работой) транспортного средства V для парковки. Вождение включает в себя операции для парковки (операции для въезда в парковочное место и выезда из парковочного места). Оператор M вводит инструкции через операционный терминал 5. Инструкции включают в себя команду операции для выполнения парковки. Команда операции включает в себя информацию о выполнении/остановке управления парковкой, выборе/изменении целевого положения парковки и выборе/изменении маршрута парковки и другую информацию, необходимую для парковки. Оператор M также может заставить оборудование 100 управления парковкой распознавать инструкции, включающие в себя команду операции, без использования операционного терминала 5, например, жестом оператора M (то есть оператор M может вводить такие инструкции в оборудование 100 управления парковкой без использования операционного терминала 5, например, жестом).
[0012]
Операционный терминал 5 включает в себя устройство связи и способен обмениваться информацией с оборудованием 100 управления парковкой и информационным сервером 3. Операционный терминал 5 передает команду операции, которая вводится вне транспортного средства, в оборудование 100 управления парковкой через сеть связи и вводит команду операции в оборудование 100 управления парковкой. Операционный терминал 5 связывается с оборудованием 100 управления парковкой, используя сигналы, включающие в себя уникальный идентификационный код. Операционный терминал 5 включает в себя дисплей 53. Дисплей 53 представляет интерфейс ввода и различные информационные элементы. Когда дисплей 53 является дисплеем типа сенсорной панели, он имеет функцию приема команды операции. Операционный терминал 5 может быть портативным оборудованием, таким как смартфон или КПК: Персональный цифровой помощник, в котором установлены приложения для приема ввода команды операции, используемой в способе управления парковкой, в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, и передачи команды операции на оборудование 100 управления парковкой.
[0013]
Информационный сервер 3 является устройством предоставления информации, предоставляемым в сети, допускающей связь. Информационный сервер включает в себя устройство 31 связи и запоминающее устройство 32. Запоминающее устройство 32 включает в себя читаемую картографическую информацию 33, информацию 34 о парковке и информацию 35 о препятствиях. Оборудование 100 управления парковкой и операционный терминал 5 могут обращаться к запоминающему устройству 32 информационного сервера 3, чтобы получать каждый элемент информации.
[0014]
Оборудование 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя устройство 10 управления, устройство 20 ввода и устройство 30 вывода. Эти компоненты оборудования 100 управления парковкой соединены друг с другом через локальную сеть контроллера (CAN) или другую бортовую локальную сеть для взаимного обмена информацией. Устройство 20 ввода включает в себя устройство 21 связи. Устройство 21 связи принимает команду операции, переданную от внешнего операционного терминала 5, и вводит команду операции в устройство 20 ввода. Субъектом, который вводит команду операции во внешний операционный терминал 5, может быть человек (пользователь, пассажир, водитель или работник парковочного объекта). Устройство 20 ввода передает полученную команду операции на устройство 10 управления. Устройство 30 вывода включает в себя дисплей 31. Устройство 30 вывода уведомляет водителя об информации управления парковкой. Дисплей 31 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой дисплей типа сенсорной панели, имеющий функцию ввода и функцию вывода. Когда дисплей 31 имеет функцию ввода, он служит в качестве устройства 20 ввода. Даже когда транспортное средство V управляется на основе команды операции, которая вводится с операционного терминала 5, пользователь (водитель или пассажир) может вводить команду операции, такую как команда для аварийной остановки, через устройство 20 ввода.
[0015]
Устройство 10 управления оборудования 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой компьютер для управления парковкой, включающий в себя ROM 12, в котором хранится программа управления парковкой, CPU 11 в качестве схемы операций, которая выполняет программу, сохраненную в ROM 12 для использования в качестве оборудования 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения и RAM 13, которое служит в качестве доступного запоминающего устройства.
[0016]
Программа управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения является программой, когда уровень беспокойства, вычисленный по перемещению оператора, который выполняет дистанционное управление, меньше предварительно определенного порогового значения, для парковки транспортного средства в соответствии с первой инструкцией управления, которая предварительно задана, в то время как, когда уровень беспокойства оператора не меньше предварительно определенного порогового значения, для выполнения управления парковкой для транспортного средства V в соответствии с инструкцией управления, полученной посредством ограничения диапазона управления предварительно заданной первой инструкции управления.
[0017]
Здесь диапазон управления относится к диапазону, в котором управление разрешено. Диапазон управления включает в себя диапазон скоростей, с которыми транспортное средство перемещается, и расстояние запаса между транспортным средством и другим объектом или тому подобным. В частности, диапазон управления определяется диапазоном значений скорости управления, который определяется верхним пределом и нижним пределом скорости транспортного средства, и диапазоном значений расстояния запаса, который определяется верхним пределом и нижним пределом расстояния запаса. Скорость, подлежащая управлению, включает в себя скорость транспортного средства, ускорение, скорость поворота (скорость рулевого управления) и ускорение поворота (ускорение рулевого управления). Дополнительно или в качестве альтернативы, диапазон управления может включать в себя диапазон объема информации (объем данных, количество элементов контента), представленный пользователю посредством дисплея или тому подобного.
[0018]
Оборудование 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой оборудование типа дистанционного управления, которое принимает команду операции от внешнего устройства и управляет перемещением транспортного средства V для парковки транспортного средства V в заданное парковочное место. Во время этой операции пользователи могут находиться за пределами салона транспортного средства или также могут находиться внутри салона транспортного средства.
Оборудование 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения может быть автономного (автоматизированного) типа управления, в котором операция рулевого управления и операция акселератора/тормоза выполняются автономно. Оборудование 100 управления парковкой также может быть полуавтономного (полуавтоматического) типа, в котором операция рулевого управления выполняется автономно, в то время как водитель выполняет операцию акселератора/тормоза.
В программе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения пользователь может произвольно выбирать целевое положение парковки, или оборудование 100 управления парковкой или сторона парковочного объекта могут автоматически задавать целевое положение парковки.
[0019]
Устройство 10 управления оборудования 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения имеет функции выполнения процесса обнаружения перемещения оператора M, процесса вычисления уровня беспокойства, процесса вычисления маршрута парковки, процесса вычисления для инструкции управления и процесса управления парковкой. Каждый из вышеупомянутых процессов выполняется взаимодействием программного обеспечения для реализации процесса и вышеописанного аппаратного обеспечения.
[0020]
Некоторые процессы обнаружения положения оператора М будут описаны со ссылкой на фиг. 2А-2D. «Перемещение оператора М» может быть обнаружено по истории результатов обнаружения положений оператора М.
[0021]
Устройство 10 управления получает положение оператора М. Положение оператора М используется для вычисления слепой зоны. Положение оператора M включает в себя информацию о положении и информацию о высоте на плоскости перемещения транспортного средства V. Положение оператора M может быть обнаружено на основе сигналов датчиков от датчиков, предусмотренных в транспортном средстве V, или также может быть получено посредством обнаружения положения операционного терминала 5, переносимого оператором M, и вычисления положения оператора M на основе позиции операционного терминала 5. Операционный терминал 5 может предоставляться в заранее определенном положении или также может переноситься оператором М. Когда операционный терминал 5 предоставляется в заранее определенном положении, оператор М перемещается в положение, в котором предоставляется операционный терминал 5, и использует операционный терминал 5 в этом положении. В этих случаях положение операционного терминала 5 может использоваться как положение оператора М.
[0022]
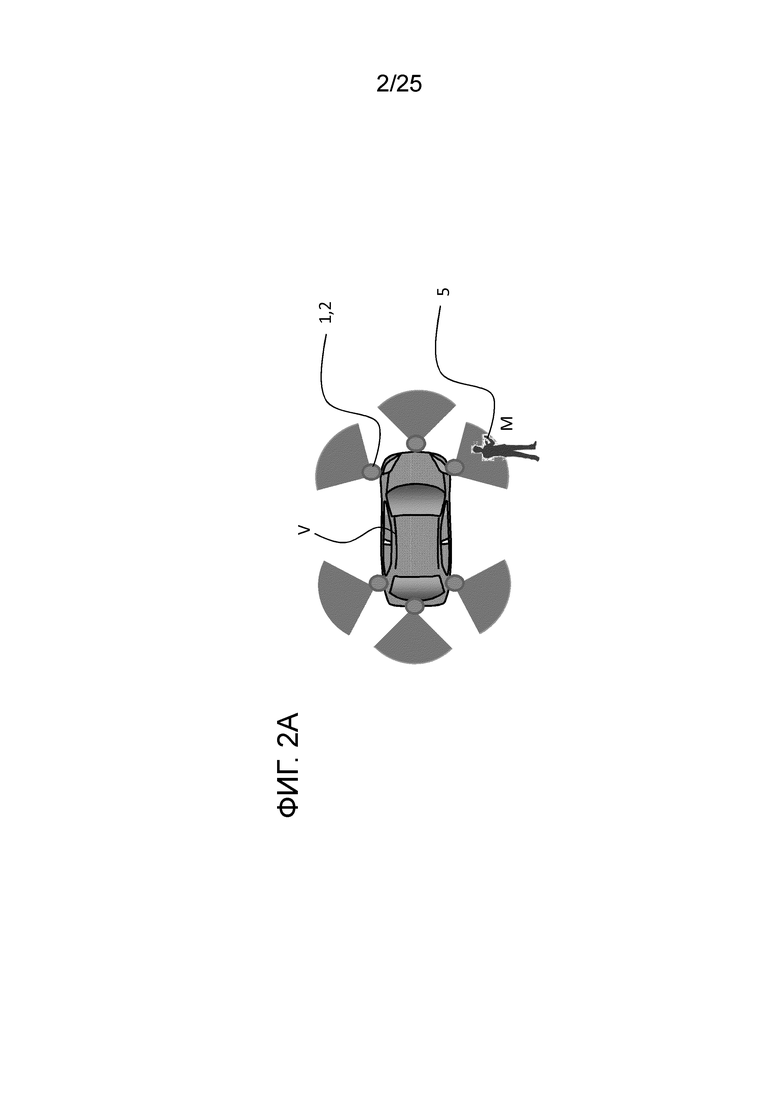
Как показано на фиг. 2А, положение оператора М обнаруживается на основе результатов обнаружения с помощью множества устройств 2 определения дальности, предусмотренных в транспортном средстве, и/или изображений, захваченных камерами 1. Положение оператора М может быть обнаружено на основе изображений, захваченных камерами 1a–1d. Каждое устройство 2 определения дальности для использования может представлять собой радиолокационное устройство, такое как радиолокационное устройство миллиметрового диапазона, лазерное радиолокационное устройство или ультразвуковое радиолокационное устройство или акустическое устройство. Множество устройств 2 определения дальности и их результаты обнаружения могут быть идентифицированы, и поэтому двумерное положение и/или трехмерное положение оператора M могут быть обнаружены на основе результатов обнаружения. Устройства 2 определения дальности могут быть расположены в тех же положениях, что и камеры 1a–1d, или могут также располагаться в разных положениях. Устройство 10 управления также может обнаруживать жест оператора M на основе изображений, захваченных камерами 1a–1d, и идентифицировать команду операции, связанную с жестом (то есть оператор M может вводить команду операции жестом).
[0023]
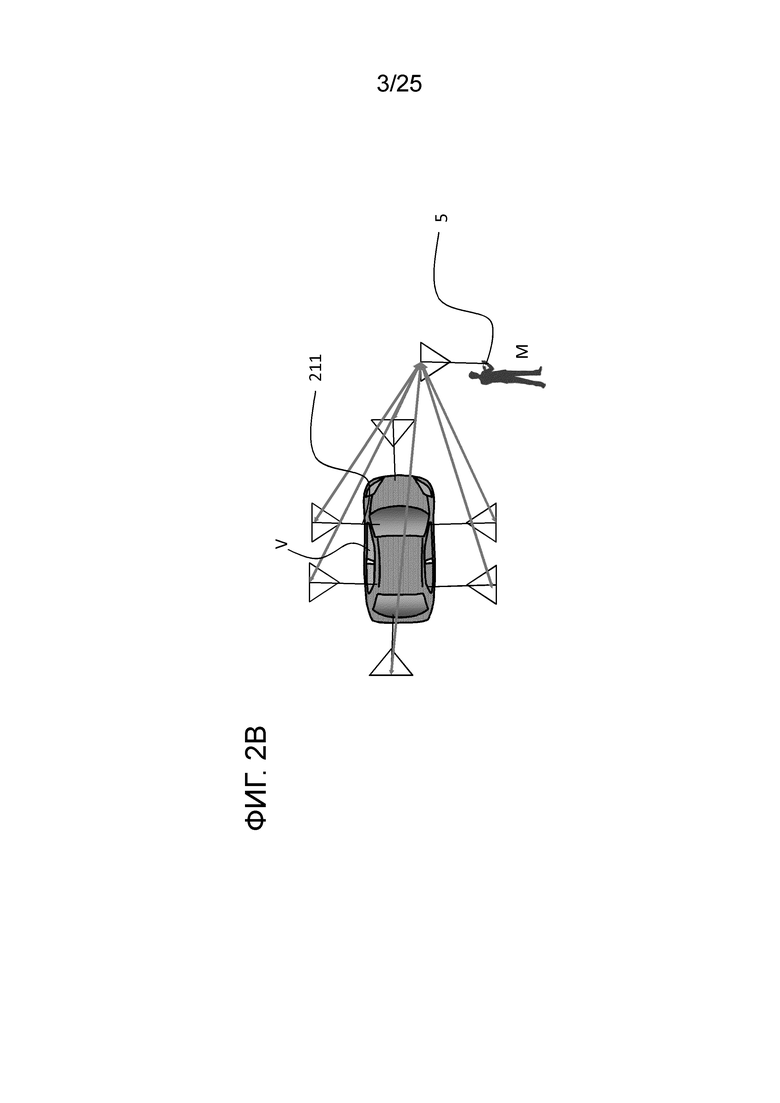
Как показано на фиг. 2B, положение операционного терминала 5 или положение оператора M, несущего операционный терминал 5, также может быть обнаружено на основе радиоволн связи между множеством антенн 211, предоставленных в разных положениях транспортного средства V, и операционным терминалом 5. Когда множество антенн 211 обмениваются данными с одним операционным терминалом 5, интенсивность принимаемой радиоволны каждой антенны 211 отличается. Положение операционного терминала 5 может быть вычислено на основе разности интенсивности между принятыми радиоволнами антенн 211. Двумерное положение и/или трехмерное положение операционного терминала 5 или оператора М может быть вычислено из разности интенсивности между принятыми радиоволнами антенн 211.
[0024]
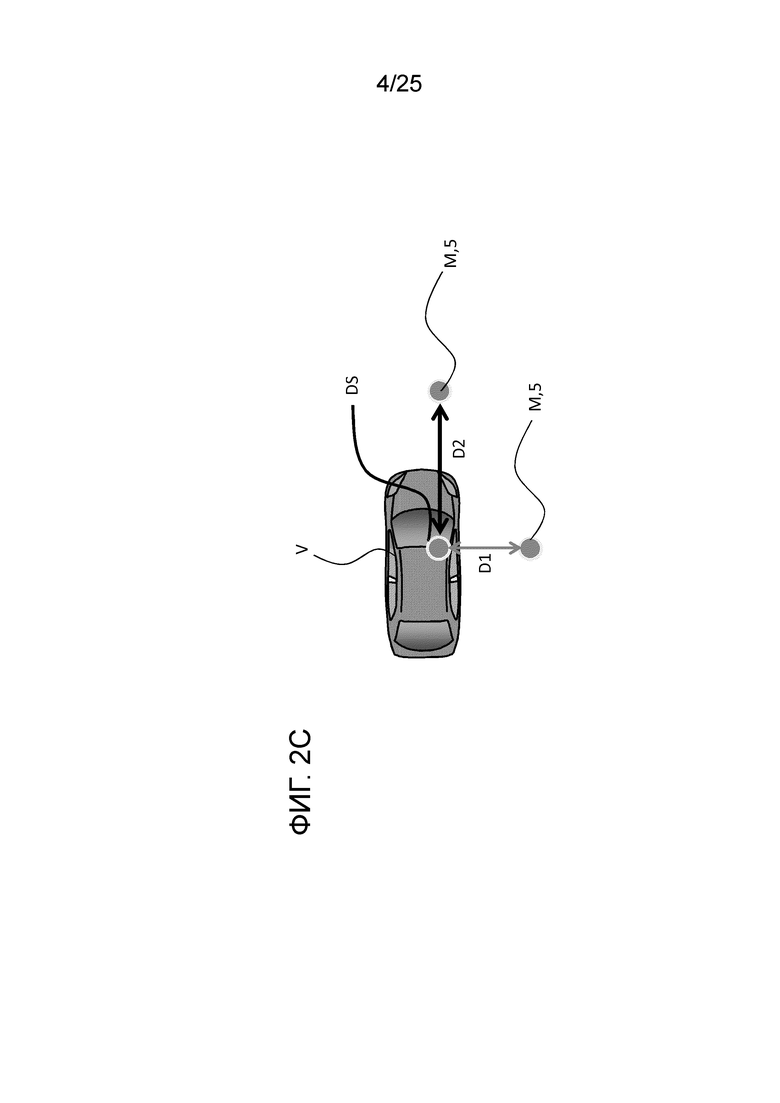
Как показано на фиг. 2C, заранее определенное положение (направление/расстояние: D1, D2) относительно сиденья водителя DS транспортного средства V могут быть предварительно обозначены как рабочее положение оператора М или как положение, в котором расположен операционный терминал 5. Например, когда оператор М временно останавливает транспортное средство V в назначенном положении и покидает транспортное средство V, чтобы задействовать операционный терминал 5, предусмотренный в предварительно определенном положении, можно вычислить начальное положение оператора М относительно транспортного средства V или начальное положение терминала 5, которое переносится оператором М, относительно транспортного средства V.
[0025]
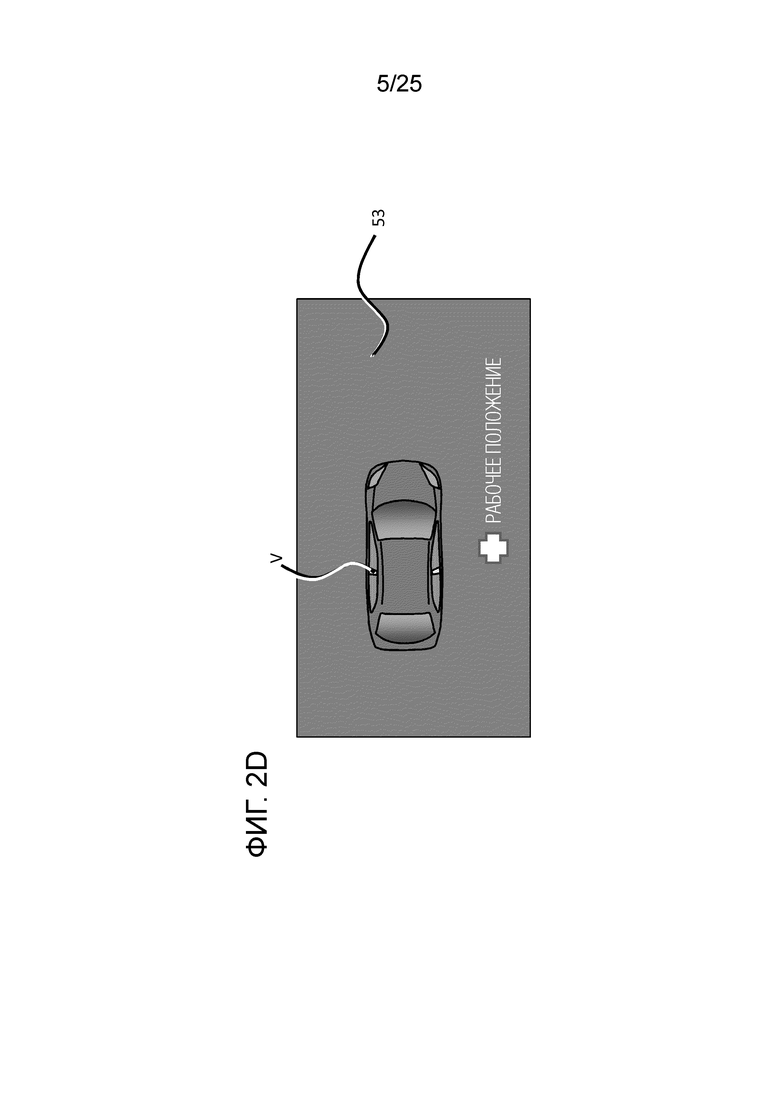
Как показано на фиг. 2D аналогичным образом информация об изображении, представляющая рабочее положение (положение, в котором оператор M стоит: рабочее положение) относительно транспортного средства V, отображается на дисплее 53 операционного терминала 5. Это управление отображением может быть выполнено приложением, установленным на стороне операционного терминала 5, или также может быть выполнено на основе команды от устройства 10 управления.
[0026]
В одном или нескольких вариантах осуществления настоящего изобретения положение оператора M вычисляется для вычисления второй области, которую оператор M может визуально распознать, или первой области (слепая зона), которую оператор M не может визуально распознать. При вычислении второй области (или первой области) обнаруженное двумерное положение оператора М может быть вычислено как положение наблюдения. В этом вычислении может учитываться положение глаза оператора М (информация о высоте). Положение, соответствующее положению глаза оператора М, вычисляется как положение наблюдения на основе двумерного положения операционного терминала 5, полученного по вышеупомянутой схеме. Положение наблюдения также может быть вычислено с использованием предварительно заданной роста стоя оператора М или среднего роста стоя взрослых. Когда сигнал обнаружения, представляющий позиционную информацию операционного терминала 5, включает в себя информацию о высоте, положение операционного терминала 5 может использоваться в качестве положения наблюдения.
[0027]
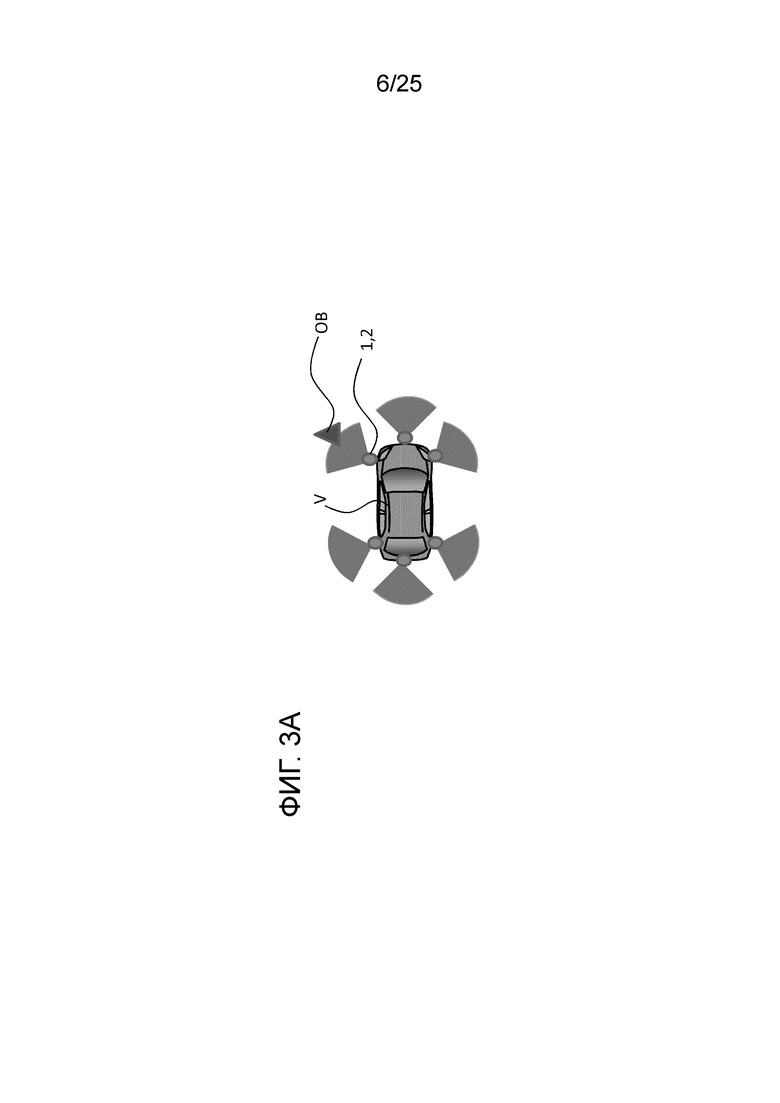
Процесс обнаружения препятствия будет описан со ссылкой на фиг. 3А и 3В. К препятствиям относятся конструкции, такие как стены и столбы парковки, установки вокруг транспортного средства, пешеходы, другие транспортные средства, припаркованные транспортные средства и т.д.
Как показано на фиг. 3А, препятствие обнаруживается на основе результатов обнаружения от множества устройств 2 определения дальности, предусмотренных в транспортном средстве V, и изображений, захваченных камерами 1. Устройства 2 определения дальности обнаруживают наличие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта на основе принятых сигналов от радарных устройств. Дополнительно или в качестве альтернативы, наличие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта могут быть обнаружены на основе изображений, захваченных камерами 1a–1d. Обнаружение препятствия может быть выполнено с использованием технологии стерео движения с камерами 1a–1d. Результаты обнаружения используются для определения того, является ли парковочное место пустым (припарковано или нет транспортное средство на парковочном месте).
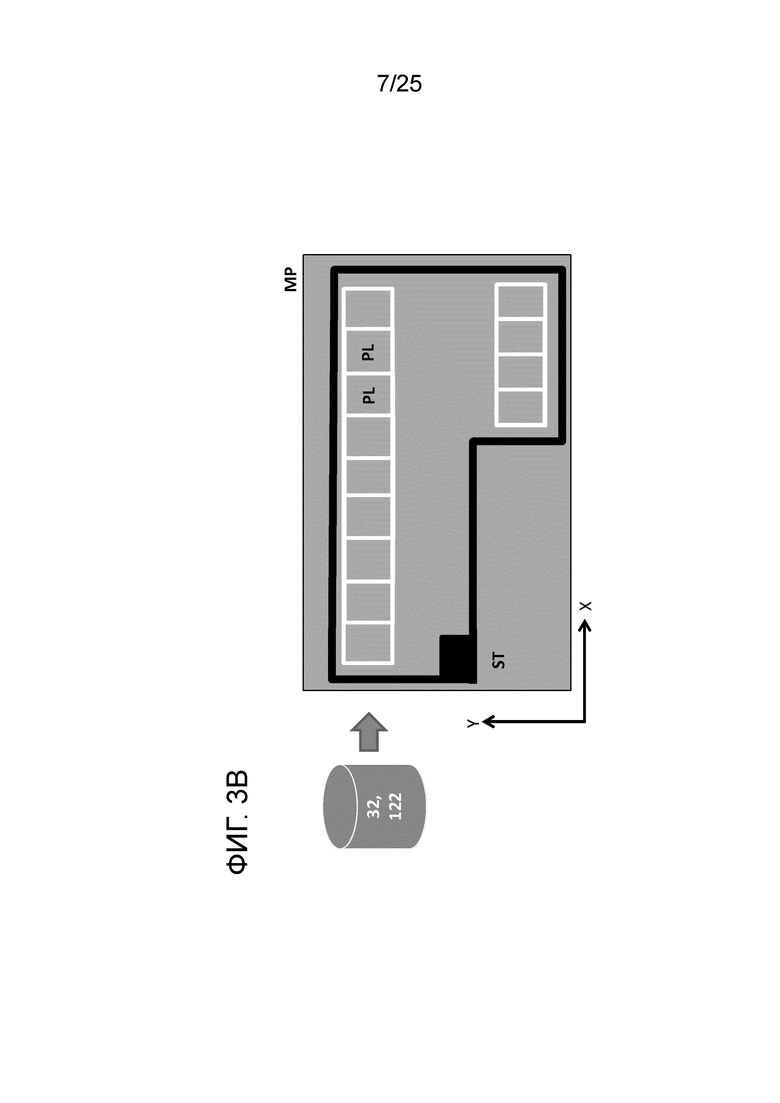
[0028]
Как показано на фиг. 3B, препятствия, включающие в себя конструкции, такие как стены и столбы парковки, могут быть обнаружены на основе информации 34 о парковке, полученной из запоминающего устройства 32 информационного сервера 3. Информация о парковке включает в себя местоположение и идентификационный номер каждой парковки, а также позиционную информацию проходов, столбов, стен, мест для хранения и т.д. на парковке. Информационный сервер 3 может управляться парковочными объектами.
[0029]
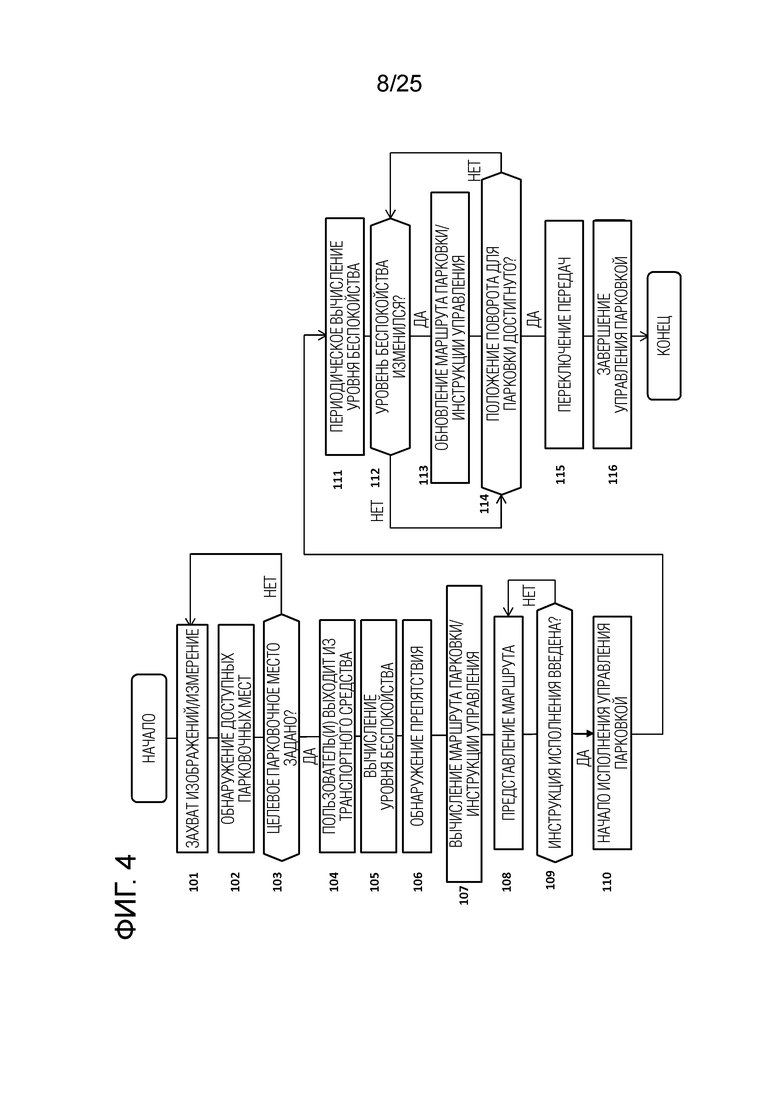
Процедура управления для управления парковкой будет описана ниже со ссылкой на блок–схему, показанную на фиг. 4 .
Фиг. 4 - блок–схема последовательности операций, иллюстрирующая процедуру управления процессом управления парковкой, выполняемым системой 1000 управления парковкой, в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Триггер для запуска процесса управления парковкой конкретно не ограничен, и процесс управления парковкой может запускаться с помощью операции пускового переключателя оборудования 100 управления парковкой.
[0030]
Оборудование 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения имеет функцию автономного перемещения транспортного средства V в парковочное место на основе команды операции, полученной извне транспортного средства.
[0031]
На этапе 101 устройство 10 управления оборудования 100 управления парковкой получает информацию вокруг транспортного средства. Получение сигналов определения дальности и получение захваченных изображений может выполняться выборочно. Устройство 10 управления получает, при необходимости, сигналы определения дальности от устройств 2 определения дальности, которые подключены к нескольким узлам транспортного средства V. Устройство 10 управления, по мере необходимости, получает изображения, которые захватываются камерами 1a–1d, прикрепленными к множеству мест транспортного средства V. Хотя это и не ограничивается особым образом, камера 1a расположена на передней решетке транспортного средства V, камера 1d расположена вблизи заднего бампера, а камеры 1b и 1c расположены на нижних частях правого и левого зеркал заднего вида. Каждая из камер 1a–1d может быть камерой, имеющей широкоугольный объектив с широким углом обзора. Камеры 1a–1d снимают изображения пограничных линий парковочных мест вокруг транспортного средства V и объектов, существующих вокруг парковочных мест. Камеры 1a-1d могут быть камерами CCD, инфракрасными камерами или другими соответствующими устройствами формирования изображения.
[0032]
На этапе 102 устройство 10 управления обнаруживает парковочные места, в которые возможна парковка. Устройство 10 управления обнаруживает рамки (области) парковочных мест на основе изображений, захваченных камерами 1a–1d. Устройство 10 управления обнаруживает пустые парковочные места, используя данные обнаружения от устройств 2 определения дальности и данные обнаружения, извлеченные из захваченных изображений. Устройство 10 управления обнаруживает доступные парковочные места среди парковочных мест. Парковочные места – это парковочные места, которые пусты (т.е. другие транспортные средства не припаркованы) и к которым можно вычислить маршруты для завершения парковки.
В одном или нескольких вариантах осуществления настоящего изобретения условие, что маршрут парковки может быть вычислен, означает, что траектория маршрута от текущего положения до целевого положения парковки может быть воспроизведена по координатам дорожного покрытия, без помех от препятствий (включая припаркованные транспортные средства).
[0033]
На этапе 103 устройство 10 управления передает доступные парковочные места на операционный терминал 5, управляет дисплеем 53 для отображения доступных парковочных мест и просит оператора M ввести информацию о выборе целевого положения парковки для парковки транспортного средства V. Целевое положение парковки может быть автоматически выбрано устройством 10 управления или стороной парковочного объекта. Когда команда операции указания парковочного места вводится в операционный терминал 5, парковочное место устанавливается в качестве целевого положения парковки.
[0034]
В одном или нескольких вариантах осуществления настоящего изобретения оператор выполняет так называемый процесс удаленной парковки, при котором оператор покидает транспортное средство V и паркует транспортное средство V снаружи. На этапе 104 оператор М выходит из транспортного средства. Оператор, вышедший из транспортного средства, вводит информацию об операции относительно процесса парковки в операционный терминал 5. Информация об операции включает в себя, по меньшей мере, инструкцию начала процесса парковки. Информация об операции передается на устройство 10 управления.
[0035]
На этапе 105 устройство 10 управления вычисляет уровень беспокойства оператора М по перемещению оператора М.
[0036]
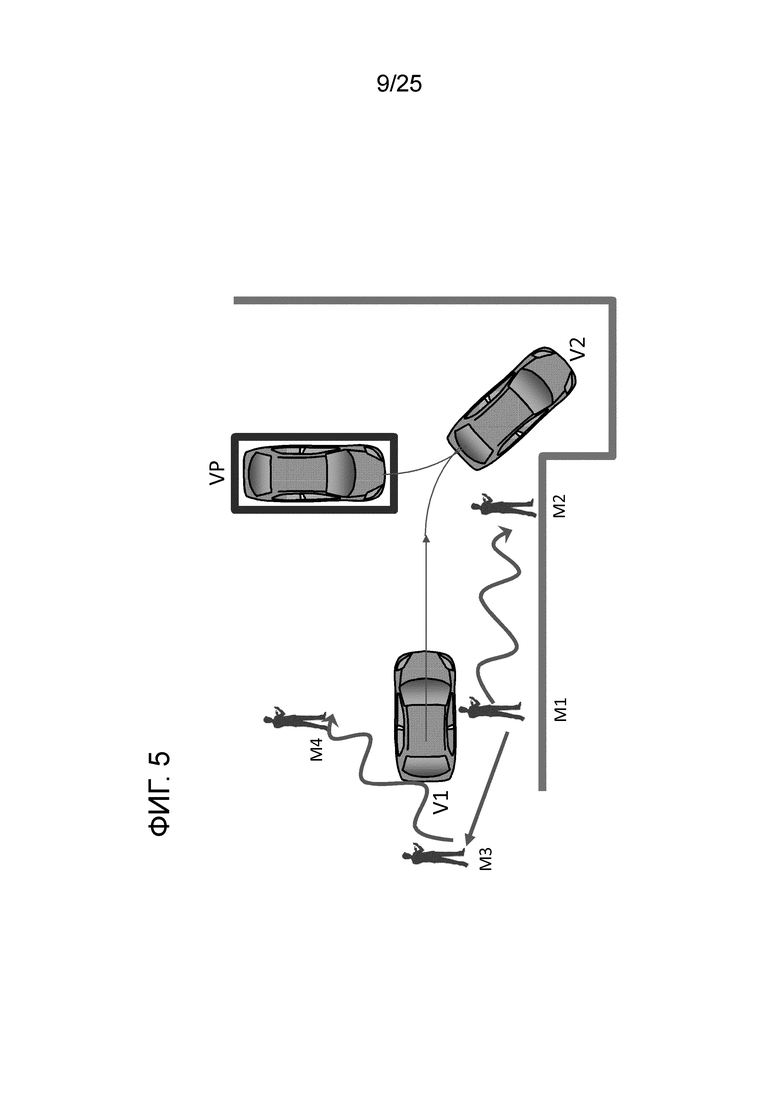
Согласно анализу перемещения оператора М, который выполняет дистанционное управление, было обнаружено, что оператор М перемещается вокруг, когда оператор М чувствует беспокойство во время дистанционного управления. Когда оператор М обеспокоен тем, сталкивается ли транспортное средство V с препятствием, таким как стена или другое транспортное средство, или приближается ли движущийся объект, оператор М стремится перемещаться, чтобы проверить окружающую обстановку. Кроме того, когда оператор M не может полностью подтвердить окружение транспортного средства из–за возникновения некоторых слепых зон, оператор M испытывает беспокойство и стремится ходить вокруг транспортного средства V. Эта ситуация проиллюстрирована на фиг. 5. Как показано на фиг. 5, оператор М, который испытывает беспокойство по поводу дистанционного управления, может перемещаться из положения M1 высадки в положение M2, петляя. Дополнительно или в качестве альтернативы, оператор M может перемещаться из положения M1 высадки в положение M3 позади транспортного средства V1, которое начинает перемещение, и дополнительно перемещается в положение M4 на левой стороне транспортного средства V1, противоположное положению высадки. Таким образом, величина перемещения оператора М, который чувствует беспокойство, имеет тенденцию быть больше, чем обычно. Кроме того, оператор М, который чувствует беспокойство во время дистанционного управления, имеет тенденцию увеличивать количество поведения (количество перемещения из–за поведения). Оператор M, который чувствует беспокойство во время дистанционного управления, имеет тенденцию бегать с короткими шагами и перемещаться быстрее, чем при нормальной ходьбе, имеет тенденцию повторять остановки и движения и перемещаться с более высоким ускорением, чем при нормальной ходьбе, имеет тенденцию перемещаться с большей разницей в высоте, чем нормальное перемещение, такое как вытягивание или подъем к месту подъема, или имеет тенденцию перемещаться с большим углом траектории перемещения, например, изменение направления перемещения. Дополнительно или в качестве альтернативы, когда чувствуется беспокойство во время дистанционного управления, оператор может перемещаться в различных направлениях, и графики положений присутствия более рассредоточены, чем при движении к обычному месту назначения.
[0037]
Устройство 10 управления вычисляет уровень беспокойства оператора M на основе временного изменения положения оператора M (или на основе изменения положения оператора M с течением времени). Положение оператора М может быть обнаружено с использованием ранее описанного способа. Положение операционного терминала 5, переносимого оператором M, может использоваться в качестве положения оператора M. Путем сохранения положения оператора M во времени может быть вычислено временное изменение в положении оператора M.
[0038]
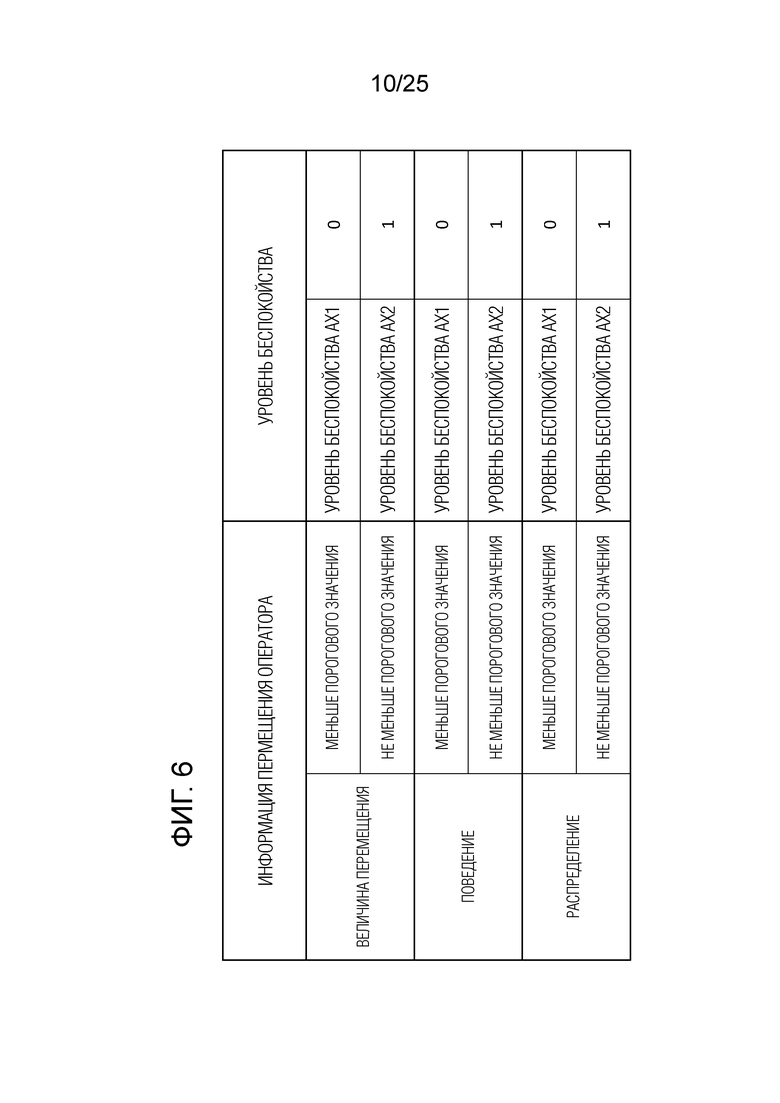
Авторы настоящего изобретения дополнительно проанализировали движение оператора М, когда он испытывает беспокойство по поводу дистанционного управления, и вывели связь с уровнем беспокойства. Фиг. Фиг.6 – диаграмма, иллюстрирующая взаимосвязь между движением оператора и уровнем беспокойства. Как показано на фиг. 6, устройство 10 управления вычисляет уровень беспокойства оператора M на основе «величины движения», «скорости движения» и «распределения» относительно движения оператора. Способы расчета уровня беспокойства конкретно не ограничены, но предварительно задается пороговое значение для каждого из «количества движения», «скорости движения» и «распределения», а когда каждый фактор меньше соответствующего порогового значения, уровень беспокойства определяется как низкий, и значение оценки уровня беспокойства устанавливается на 0 (ноль), в то время как когда каждый фактор не меньше соответствующего порогового значения, уровень беспокойства определяется как высокий, а значение оценки уровня беспокойства установлен на 1,0. Числовое значение оценочного значения может быть установлено соответствующим образом. Дополнительно или в качестве альтернативы, уровень беспокойства оператора M может быть вычислен на основе значения каждого из уровня беспокойства на основе «величины движения», уровня беспокойства на основе «скорости движения» и уровня беспокойства на основе на «распределение» или также может быть вычислен путем их объединения. Уровень беспокойства, основанный на «величине движения», уровень беспокойства, основанный на «скорости движения», и уровень беспокойства, основанный на «распределении», могут быть взвешены для получения соответствующих уровней беспокойства, которые могут быть суммированы, чтобы вычислить уровень беспокойства оператора М.
Уровень беспокойства оператора М может быть вычислен на основе временного изменения положения оператора М, и поэтому управление парковкой может быть выполнено в соответствии с уровнем беспокойства оператора М.
[0039]
Устройство 10 управления может вычислять уровень беспокойства оператора M на основе «величины движения» оператора M. Величина перемещения оператора M может быть вычислена на основе временного изменения положения оператора M или положения операционного терминала 5. Величина перемещения оператора M может быть расстоянием (интегрированным значением), вдоль которого оператор M фактически перемещался в течение предварительно определенного времени, или может также быть расстоянием от начальной позиции до текущей позиции. При расчете уровня беспокойства можно использовать реляционное выражение, в котором величина движения предварительно связана с уровнем беспокойства.
[0040]
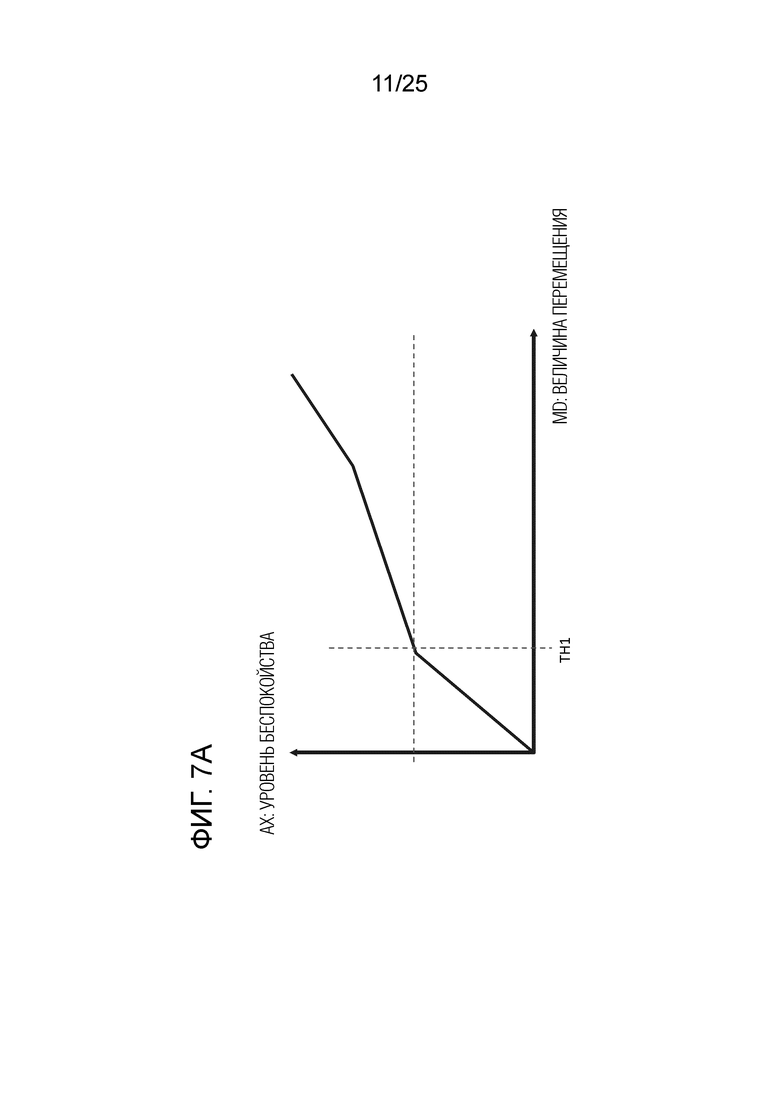
Фиг. 7А иллюстрирует взаимосвязь между «величиной перемещения» оператора М и уровнем беспокойства. Чем больше величина MD перемещения, тем выше уровень AX беспокойства оператора M. Когда величина MD перемещения не меньше, чем пороговое значение TH1, которое предварительно задано, уровень AX беспокойства оператора M определяется как высокий, в то время как когда величина MD перемещения меньше предварительно заданного порогового значения TH1, уровень AX беспокойства оператора M определяется как низкий. Когда уровень AX беспокойства высокий, значение оценки установлено на 1,0, а когда уровень AX беспокойства низкий, значение оценки установлено на 0.
[0041]
Величина перемещения оператора М, который чувствует беспокойство, имеет тенденцию быть больше, чем обычно. Уровень беспокойства оператора М может быть вычислен на основе величины перемещения, и поэтому управление парковкой может быть выполнено в соответствии с уровнем беспокойства оператора М.
[0042]
Устройство 10 управления может вычислять уровень беспокойства оператора M на основе «величины поведения («величины перемещения из–за поведения)» оператора M. «Величина поведения» включает в себя любое одно или более из скорости перемещения, ускорения перемещения, значения изменения в направлении перемещения и значения изменения положения оператора M по высоте. Скорость перемещения, ускорение перемещения и значение изменения в направлении перемещения оператора M можно вычислить на основе временного изменения положения оператора М или положения операционного терминала 5. Значение изменения положения по высоте оператора M может быть вычислено на основе временного изменения положения по высоте операционного терминала 5, переносимого оператором M. Информация о положении по высоте может быть вычислена на основе значения обнаружения от датчика высоты операционного терминала 5. Скорость перемещения оператора М может быть средней скоростью или также может быть максимальной скоростью. Ускорение перемещения оператора М может быть средним ускорением или также может быть максимальным ускорением. Величина изменения в направлении перемещения оператора М может быть углом поворота или также может быть величиной изменения угла поворота (скорости поворота). Оператор М, который чувствует беспокойство, имеет тенденцию перемещаться с места на место. Величина изменения положения по высоте оператора М может быть средним значением величины изменения высоты или также может быть ее максимальным значением. При расчете уровня беспокойства используется реляционное выражение, в котором величина перемещения, вызванного поведением оператора М, предварительно связана с уровнем беспокойства.
[0043]
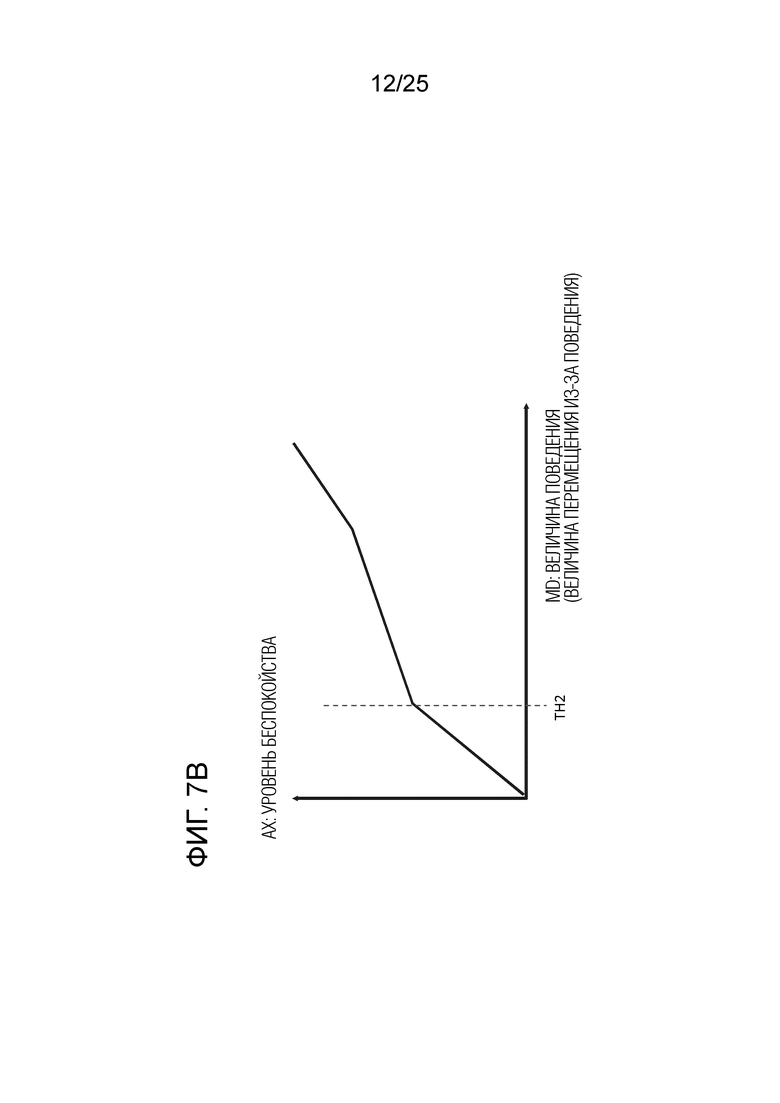
Фиг. 7B иллюстрирует взаимосвязь между «величиной поведения (величиной перемещения из–за поведения)» MV оператора M и уровнем беспокойства. Чем больше величина MV поведения, величина перемещения, вызванного поведением, тем выше уровень AX беспокойства оператора М. Когда величина MV поведения оператора М не меньше, чем пороговое значение TH2, которое предварительно задано, уровень беспокойства AX оператора M определяется как высокий, тогда как, когда величина MV поведения оператора M меньше порогового значения TH2, которое предварительно задано, уровень AX беспокойства оператора M определяется как низкий. Когда уровень AX беспокойства высокий, значение оценки установлено на 1,0, а когда уровень AX беспокойства низкий, значение оценки установлено на 0.
[0044]
Оператор М, который чувствует беспокойство во время дистанционного управления, имеет тенденцию бегать короткими шагами и перемещаться быстрее, чем при нормальной ходьбе, имеет тенденцию повторять остановки и движения и перемещаться с более высоким ускорением, чем при нормальной ходьбе, имеет тенденцию перемещаться вперед и назад в различных направлениях, или имеет тенденцию менять направление перемещения через короткие промежутки времени. Уровень беспокойства оператора M может быть вычислен на основе «величины поведения», включающей в себя любое одно или несколько из скорости перемещения, ускорения перемещения, величины изменения в направлении перемещения и величины изменения в положении высоты оператор M, и, следовательно, управление парковкой может выполняться в соответствии с уровнем беспокойства оператора M.
[0045]
Устройство 10 управления может вычислять уровень беспокойства оператора M на основе «распределения положения присутствия» оператора M. Распределение положения оператора M может быть вычислено на основе результатов обнаружения положения оператора М или положения операционного терминала 5. Распределение положения оператора М может быть представлено числом раз присутствия в соответствующих координатах положения. При расчете уровня беспокойства можно использовать реляционное выражение, в котором распределение скорости перемещения или ускорения перемещения предварительно связано с уровнем беспокойства.
[0046]
Фиг. 7C представляет собой набор изображений (a) и (b), каждое из которых иллюстрирует «распределение положения присутствия» оператора M, например, со ссылкой на начальное положение M0, такое как положение высадки. Фиг. 7C (a) иллюстрирует распределение положения присутствия оператора (монитора), который не испытывает беспокойства по поводу дистанционного управления, а фиг. 7C (b) иллюстрирует распределение положения присутствия монитора, который чувствует беспокойство по поводу дистанционного управления. Ширина Wa распределения положения присутствия оператора без беспокойства, показанная на фиг. 7C (a), уже, чем ширина Wb распределения положения присутствия оператора с беспокойством. Положение присутствия оператора М может быть определено на основе положения присутствия операционного терминала 5. Выборки для получения распределения могут быть положениями присутствия, в которых оператор M или операционный терминал 5 присутствовал, когда транспортное средство V перемещается из положения управления парковкой в текущее положение, или также могут быть положениями присутствия, в которых оператор M или операционный терминал 5 присутствовал в течение прошедшего предварительно определенного времени (например, 5 секунд) до текущего времени.
[0047]
Фиг. 7D иллюстрирует взаимосвязь между «значением дисперсии положения присутствия», полученным из распределения положения присутствия по фиг. 7С, и уровнем беспокойства. Чем больше значение MS дисперсии положения присутствия, тем выше уровень AX беспокойства оператора M. Когда значение MS дисперсии положения присутствия не меньше порогового значения TH3, которое предварительно задано, уровень AX беспокойства оператора М определяется как высокий, тогда как, когда значение AX дисперсии меньше предварительно определенного порогового значения TH3, уровень AX беспокойства оператора М определяется как низкий. Когда уровень AX беспокойства высокий, значение оценки установлено на 1,0, а когда уровень AX беспокойства низкий, значение оценки установлено на 0.
[0048]
Оператор М, который чувствует беспокойство во время дистанционного управления, имеет тенденцию перемещаться в различных направлениях, а не выполнять направленное перемещение. Уровень беспокойства оператора M может быть вычислен на основе значения дисперсии положения присутствия, и поэтому управление парковкой может быть выполнено в соответствии с уровнем беспокойства оператора М.
[0049]
Обращаясь снова к фиг. 4, на этапе 106 устройство 10 управления обнаруживает положение, в котором существует препятствие, используя ранее описанную схему.
[0050]
На этапе 107 устройство 10 управления вычисляет маршрут парковки до целевого положения парковки. Маршрут парковки включает в себя положение поворота для парковки, необходимое для перемещения на парковочное место. Для этой операции маршрут парковки определяется как линия, а также определяется как полосообразная область, соответствующая занимаемой области транспортным средством V на основе ширины транспортного средства. Занимаемая площадь транспортным средством V определяется с учетом ширины транспортного средства и ширины запаса, обеспечиваемой для перемещения.
[0051]
Когда уровень беспокойства не меньше предварительно определенного порогового значения, устройство 10 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения генерирует вторую инструкцию управления, полученную путем ограничения диапазона управления первой инструкции управления, которая предварительно задана в инструкции управления, для перемещения транспортного средства по маршруту парковки.
[0052]
Ограничение диапазона управления в отношении процесса генерации маршрута парковки будет описано первым.
В общем, при расчете маршрута парковки маршрут парковки вычисляется так, что между маршрутом парковки и препятствием обеспечивается заранее определенный диапазон расстояния запаса, то есть обеспечивается зазор. Диапазон расстояния запаса может быть определен диапазоном значений расстояния запаса, который определяется верхним пределом и нижним пределом. Устройство 10 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения генерирует второй маршрут парковки, когда уровень беспокойства не меньше предварительно определенного порогового значения. Когда уровень беспокойства оператора составляет не менее заданного порогового значения, второй маршрут парковки вычисляется таким образом, что второй диапазон расстояния запаса между вторым маршрутом парковки и препятствием больше, чем первый диапазон расстояния запаса между первым маршрутом парковки и объектом. Второй диапазон расстояния запаса – это диапазон управления, включенный во вторую инструкцию управления. Первый диапазон расстояния запаса – это диапазон управления, включенный в предварительно заданную первую инструкцию управления. Другими словами, когда уровень беспокойства оператора не меньше предварительно определенного порогового значения, расстояние, на котором транспортное средство перемещается, чтобы приблизиться к препятствию, становится небольшим. Расстояние подъезда к препятствию становится большим.
[0053]
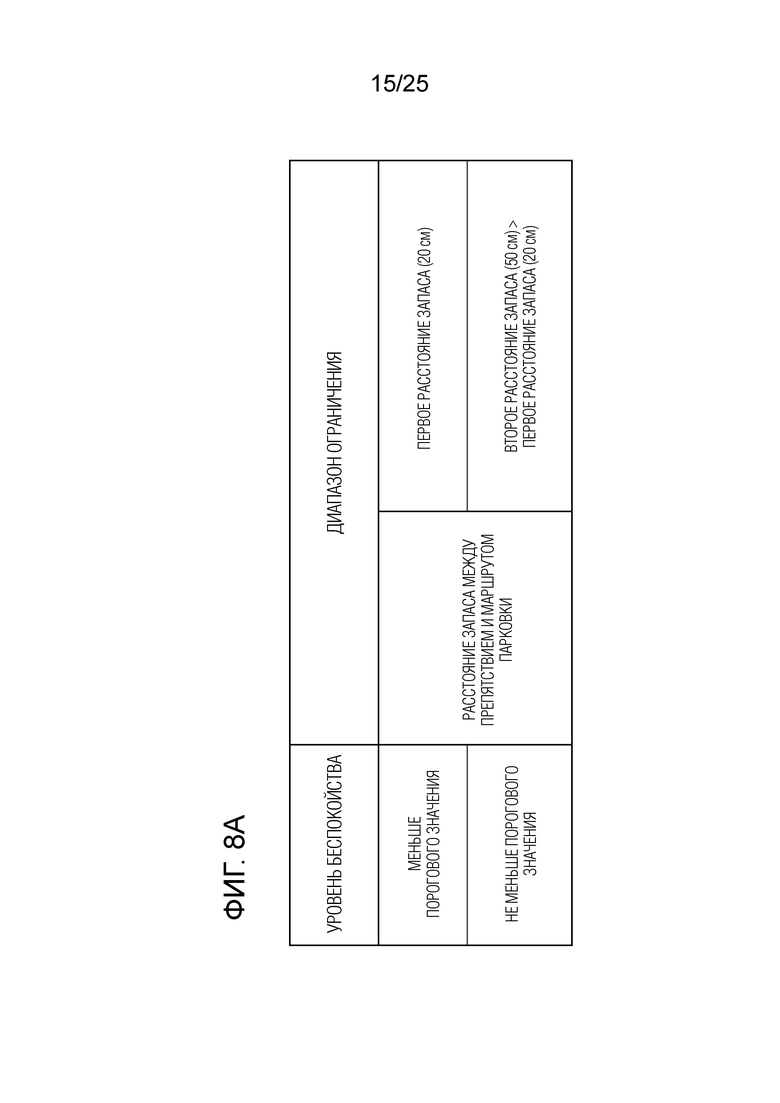
Фиг. 8А – изображение, иллюстрирующее пример диапазона управления процесса вычисления маршрута парковки. Как показано на фиг. 8А, когда уровень беспокойства меньше предварительно определенного порогового значения, оператор М не испытывает беспокойства, поэтому первый диапазон расстояния запаса между препятствием и маршрутом парковки устанавливается относительно коротким. Хотя это и не ограничено, зазор составляет около 20 см. Этот первый диапазон расстояния запаса является стандартным значением, которое предварительно задается. С другой стороны, когда уровень беспокойства не меньше предварительно определенного порогового значения, оператор М чувствует беспокойство, поэтому первый диапазон расстояния запаса между препятствием и маршрутом парковки изменяется на второй диапазон расстояния запаса, более длинный, чем первый диапазон расстояния запаса. Хотя это и не ограничивается особым образом, зазор во втором диапазоне расстояния запаса составляет около 50 см.
[0054]
Когда определено, что оператор M испытывает беспокойство, предварительно заданный первый диапазон расстояния запаса изменяется на второй диапазон расстояния запаса, более длинный, чем первый диапазон расстояния запаса. Расширяя зазор от препятствия, оператор М, который чувствует беспокойство, может выполнять дистанционное управление с облегчением. Оператор M может выполнять операцию, подтверждая, что препятствие и транспортное средство V движутся по маршруту парковки, и, таким образом, облегчается дистанционное управление.
[0055]
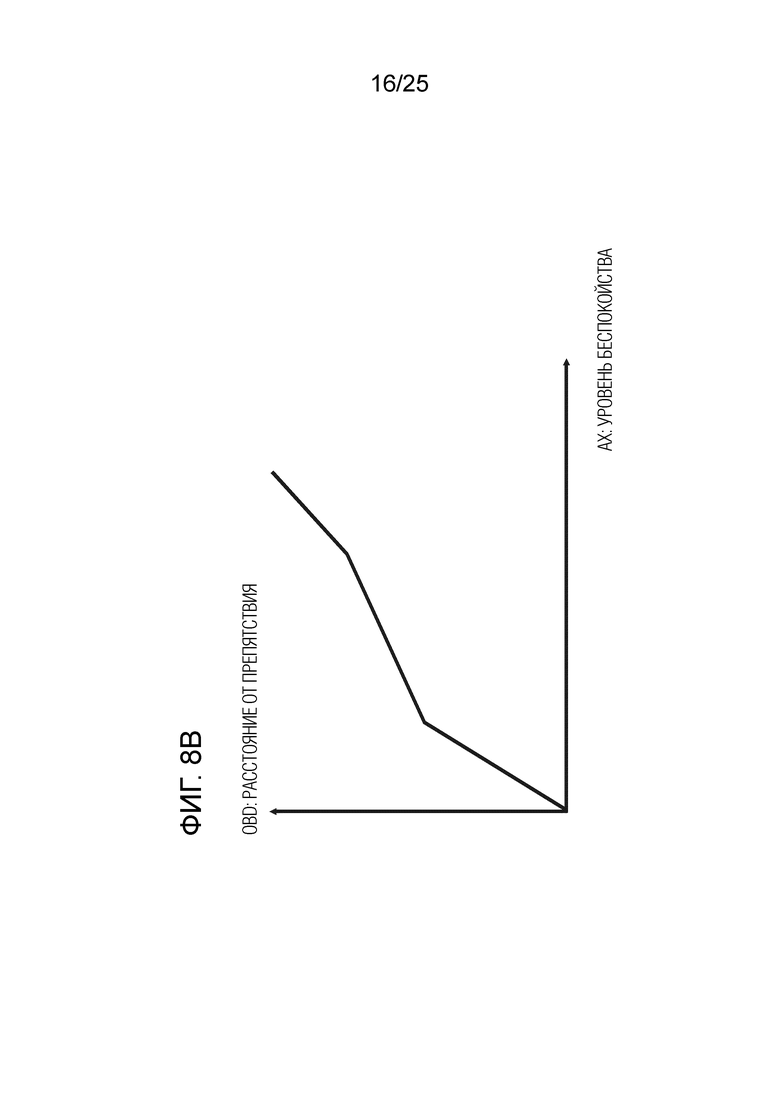
Устройство 10 управления устанавливает второй диапазон расстояния запаса на большее расстояние, так как уровень беспокойства, который представляет собой степень беспокойства, испытываемого оператором М, выше. То есть, чем больше беспокойство оператора М, тем шире устанавливается зазор от препятствия. Фиг.8B - изображение, иллюстрирующее взаимосвязь между уровнем AX беспокойства и расстоянием OBD запаса маршрута парковки. Как показано на фиг. 8B, по мере того как уровень беспокойства увеличивается, устанавливается большее значение расстояния OBD запаса, и вычисляется маршрут парковки, вдоль которого обеспечивается расстояние OBD запаса. Чем выше уровень беспокойства, тем дольше установлен второй диапазон расстояния запаса, так что беспокойство, испытываемое оператором М, может быть уменьшено.
[0056]
Далее будет описано ограничение диапазона управления инструкции управления для перемещения по маршруту парковки.
Когда уровень беспокойства не меньше предварительно определенного порогового значения, устройство 10 управления вычисляет вторую инструкцию управления, полученную путем ограничения диапазона управления первой инструкции управления, которая предварительно задана в инструкции управления. Когда оператор M, который выполняет дистанционное управление, чувствует беспокойство, диапазон управления первой инструкции управления изменяется, и вычисляется новая вторая инструкция управления. Новая вторая инструкция управления обеспечивает диапазон управления, в котором беспокойство по поводу дистанционного управления парковкой больше ослабляется, чем то, которое обеспечивается первой инструкцией управления. Например, скорость перемещения изменяется на низкую, а ускорение/замедление также изменяется на малое. Путем изменения диапазона управления инструкции управления таким образом можно уменьшить беспокойство оператора М и, таким образом, облегчить дистанционное управление.
[0057]
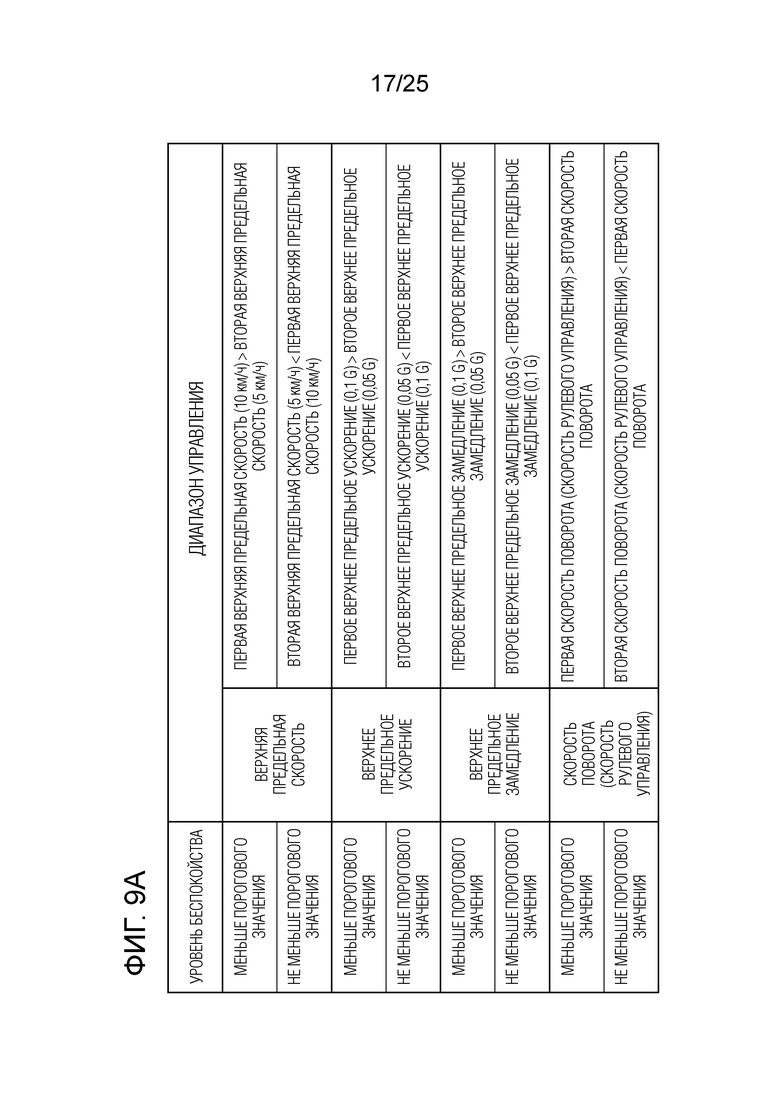
Фиг. 9А – изображение, иллюстрирующее пример диапазона управления процессом вычисления инструкции управления. Диапазон регулирования, который должен быть ограничен (изменен), является диапазоном скоростей, установленным в инструкции управления. Диапазон скоростей в инструкции управления включает верхнюю предельную скорость, верхнее предельное ускорение, верхнее предельное замедление и скорость поворота (скорость рулевого управления). Хотя это не показано, верхняя предельная величина поворота и ускорение поворота (ускорение рулевого управления), которые влияют на скорость, также могут быть включены в диапазон скоростей.
[0058]
Устройство 10 управления вычисляет вторую инструкцию управления так, что второй диапазон скоростей, включенный во вторую инструкцию управления, меньше, чем первый диапазон скоростей, включенный в первую инструкцию управления. Оператор М следит за перемещением транспортного средства V, которым нужно управлять. Чем выше диапазон скоростей транспортного средства V, тем сложнее контролировать транспортное средство V. Когда оператор М чувствует беспокойство, диапазон скоростей во время перемещения транспортного средства V, подлежащего парковке, изменяется на низкое значение. То есть верхний предел диапазона скоростей понижен. Нижний предел диапазона скоростей также может быть снижен. Таким образом, беспокойство оператора М может быть уменьшено, и дистанционное управление облегчено.
[0059]
Например, устройство 10 управления вычисляет вторую инструкцию управления так, что вторая верхняя предельная скорость, включенная во вторую инструкцию управления, ниже, чем первая верхняя предельная скорость, включенная в первую инструкцию управления. Когда оператор М чувствует беспокойство, верхняя предельная скорость во время перемещения транспортного средства V, подлежащего парковке, изменяется на низкую; следовательно, беспокойство оператора M может быть ослаблено, и, таким образом, облегчается дистанционное управление.
[0060]
Как показано на фиг. 9А, когда уровень беспокойства меньше порогового значения, верхняя предельная скорость устанавливается высокой (например, 10 км/ч), в то время как, когда уровень беспокойства не меньше порогового значения, верхняя предельная скорость устанавливается низкой (например, 5 км/ч). Когда уровень беспокойства меньше порогового значения, верхнее предельное ускорение или верхнее предельное замедление задается высоким (например, 0,1 G), в то время как когда уровень беспокойства не меньше порогового значения, верхнее предельное ускорение или верхнее предельное замедление задается низким (например, 0,05 G). Когда уровень беспокойства меньше порогового значения, верхняя предельная скорость поворота (скорость рулевого управления) задается высокой, в то время как, когда уровень беспокойства не меньше порогового значения, скорость поворота (скорость рулевого управления) задается низкой.
[0061]
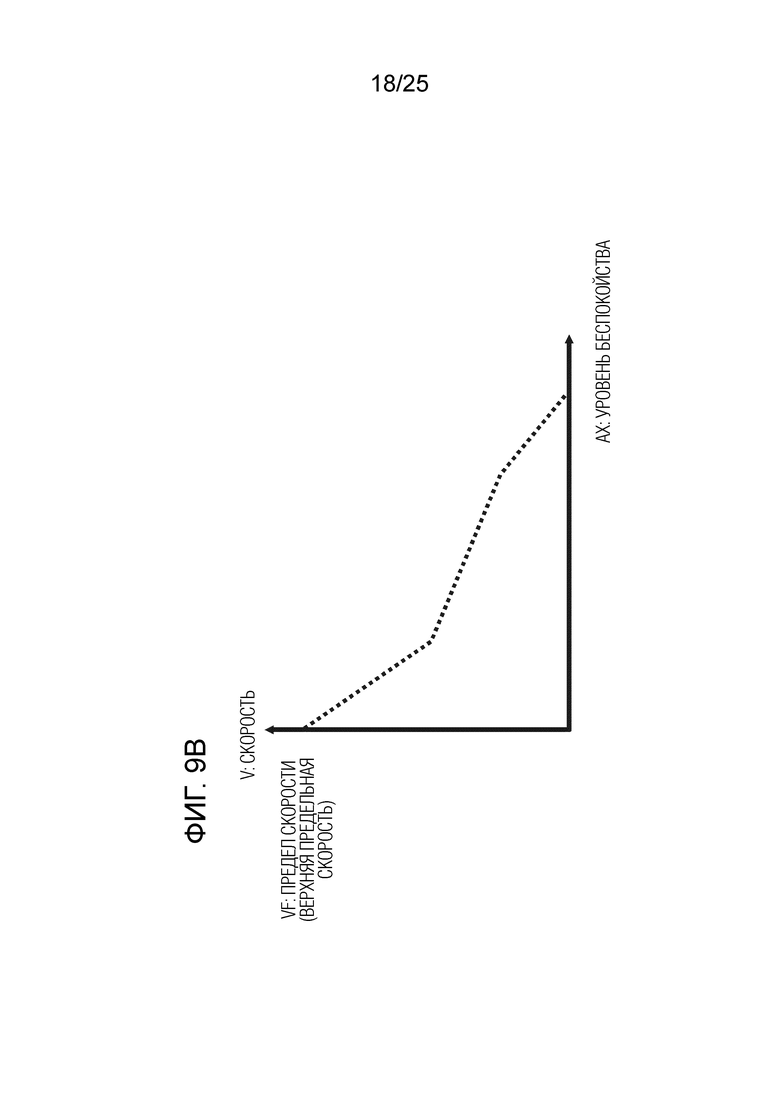
Устройство 10 управления задает второй диапазон скоростей (верхняя предельная скорость и/или нижняя предельная скорость) на более низкое значение, поскольку уровень беспокойства оператора М выше. Фиг. 9B является изображением, иллюстрирующим взаимосвязь между уровнем AX беспокойства и верхней предельной скоростью VF. Как показано на рисунке, чем выше уровень беспокойства, тем ниже скорость (верхний предел и/или нижний предел) диапазона скоростей. Когда диапазон скоростей является диапазоном значений скорости транспортного средства, чем выше уровень беспокойства, тем ниже верхняя предельная скорость и/или нижняя предельная скорость. Когда диапазон скоростей представлен диапазоном значений ускорения, чем выше уровень беспокойства, тем ниже верхнее предельное ускорение и/или нижнее предельное ускорение. Когда диапазон скоростей представлен верхней предельной скоростью поворота (скорость рулевого управления), чем выше уровень беспокойства, тем ниже верхняя предельная скорость поворота (скорость рулевого управления) и/или нижняя предельная скорость поворота (скорость рулевого управления).
[0062]
Устройство 10 управления задает второй диапазон скоростей на более низкое значение, когда уровень беспокойства оператора M выше, и, следовательно, транспортное средство V может перемещаться медленнее, когда беспокойство, испытываемое оператором M, больше. Это может облегчить беспокойство оператора М, и таким образом облегчается дистанционное управление.
[0063]
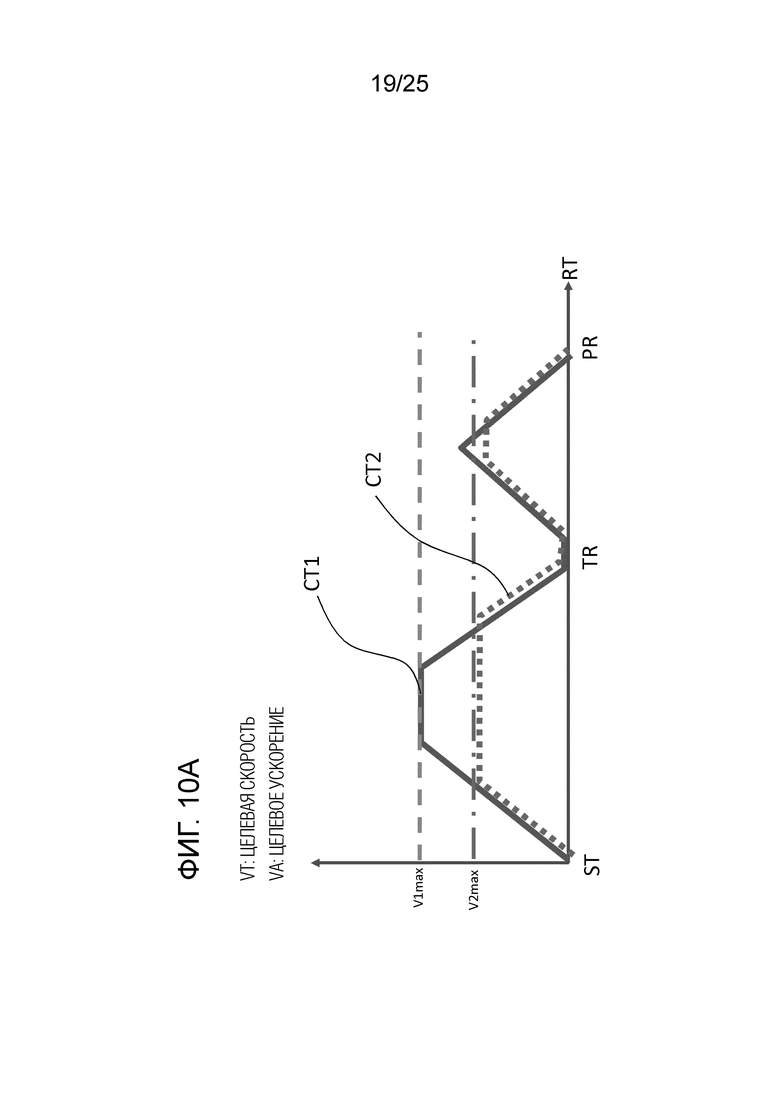
Фиг.10А - изображение, иллюстрирующее первый пример инструкции управления относительно диапазона скоростей. Диапазон скоростей связан с каждым положением на маршруте RT парковки. На маршруте RT парковки начальное положение управления парковкой обозначено ST, точка поворота для парковки обозначена TR, а положение завершения парковки обозначено PR.
Фиг. 10A иллюстрирует первую инструкцию CT1 управления, в которой установлен первый диапазон скоростей, и вторую инструкцию CT2 управления, в которой установлен второй диапазон скоростей. Первая инструкция CT1 управления представляет переходный процесс целевой скорости, которая является первым диапазоном скоростей, а вторая инструкция CT2 управления представляет переходный процесс целевой скорости, которая является вторым диапазоном скоростей. Первая верхняя предельная скорость, которая определяет первый диапазон скоростей первой инструкции CT1 управления, представлена V1max, а вторая верхняя предельная скорость, которая определяет второй диапазон скоростей второй инструкции CT2 управления, представлена V2max. Вторая верхняя предельная скорость V2max ниже, чем первая верхняя предельная скорость V1max. Во второй инструкции CT2 управления установлена относительно низкая верхняя предельная скорость, и целевая скорость VT также является низкой; следовательно, транспортное средство V может перемещаться медленно. Это может облегчить беспокойство оператора М, и таким образом облегчается дистанционное управление.
[0064]
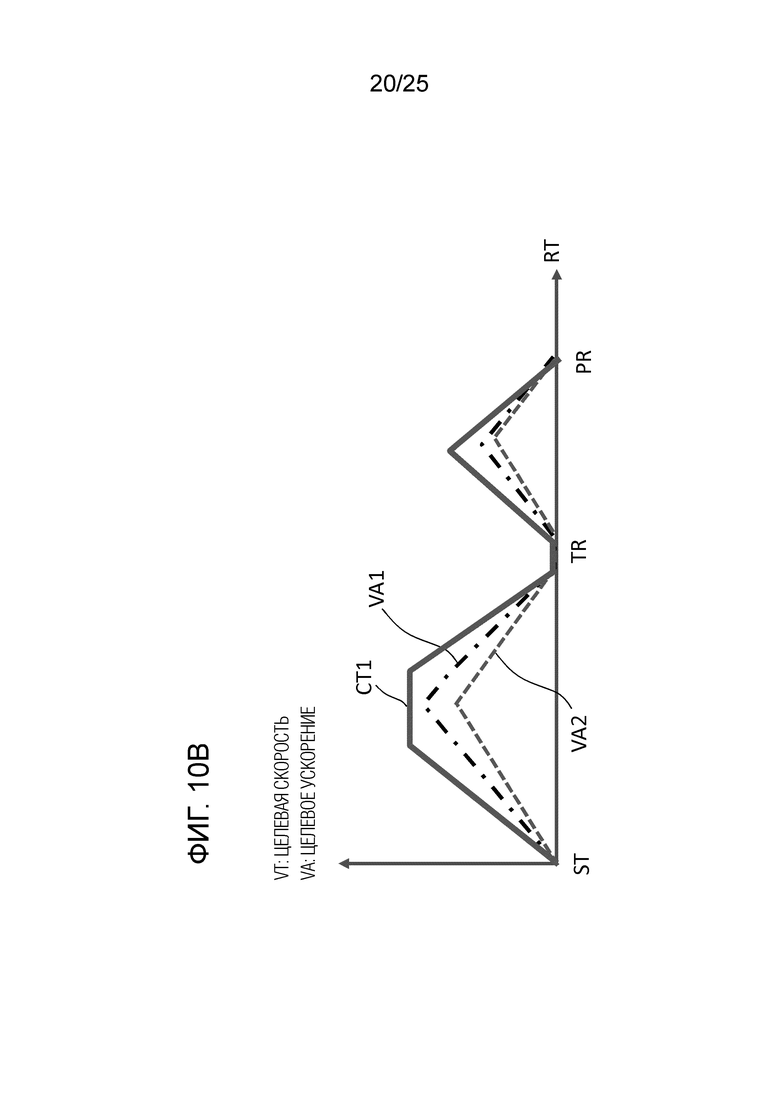
Фиг. 10B – изображение, иллюстрирующее второй пример инструкции управления относительно диапазона скоростей. Диапазон скоростей связан с каждым положением на маршруте RT парковки. Первая инструкция CT1 управления проиллюстрирована для справки. Кроме того, показаны переходный процесс первого целевого ускорения VA1, который представляет первый диапазон скоростей первой инструкции CT1 управления, и переходный процесс второго целевого ускорения VA2, который представляет второй диапазон скоростей второй инструкции CT2 управления. Второе целевое ускорение VA2 является более низким значением, чем первое целевое ускорение VA1, и можно обнаружить, что вторая инструкция управления вызывает небольшое изменение скорости. Это может облегчить беспокойство оператора М, и таким образом облегчается дистанционное управление.
[0065]
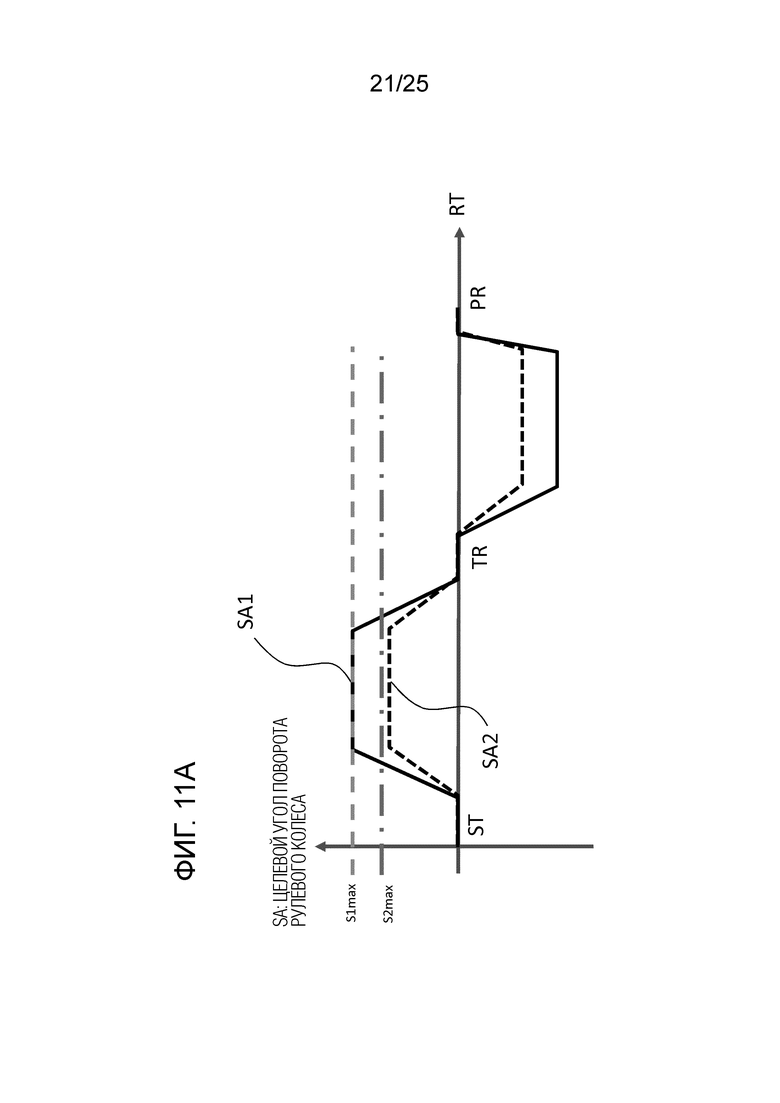
Фиг. 11А – изображение, иллюстрирующее первый пример инструкции управления относительно рулевого управления. Диапазон угла поворота рулевого колеса связан с каждым положением на маршруте RT парковки. На маршруте RT парковки начальное положение управления парковкой обозначено ST, точка поворота для парковки обозначена TR, а положение завершения парковки обозначено PR.
Фиг. 11А иллюстрирует первую инструкцию SA1 управления, в которой установлен первый диапазон угла поворота рулевого колеса, и вторую инструкцию SA2 управления, в которой установлен второй диапазон угла поворота рулевого колеса. Первая инструкция SA1 управления обеспечивает переходный процесс целевого угла SA поворота рулевого колеса, который представляет первый диапазон угла поворота рулевого колеса, а вторая инструкция SA2 управления обеспечивает переходный процесс целевого угла SA поворота рулевого колеса, который представляет второй диапазон угла поворота рулевого колеса . Первая верхняя предельная величина поворота рулевого колеса, которая определяет первый диапазон угла поворота рулевого колеса первой инструкции SA1 управления, представлена S1max, а вторая верхняя предельная величина поворота рулевого колеса, которая определяет второй диапазон угла поворота рулевого колеса второй инструкции SA2 управления, представлена S2max. Вторая верхняя предельная величина S2max поворота рулевого колеса меньше, чем первая верхняя предельная величина S1max поворота рулевого колеса . Во второй инструкции SA2 управления задается относительно небольшая верхняя предельная величина поворота рулевого колеса, и целевой угол SA поворота рулевого колеса также мал; следовательно, транспортное средство V перемещается при низким угле поворота рулевого колеса и может перемещаться медленно/постепенно. Это может облегчить беспокойство оператора М, и таким образом облегчается дистанционное управление.
[0066]
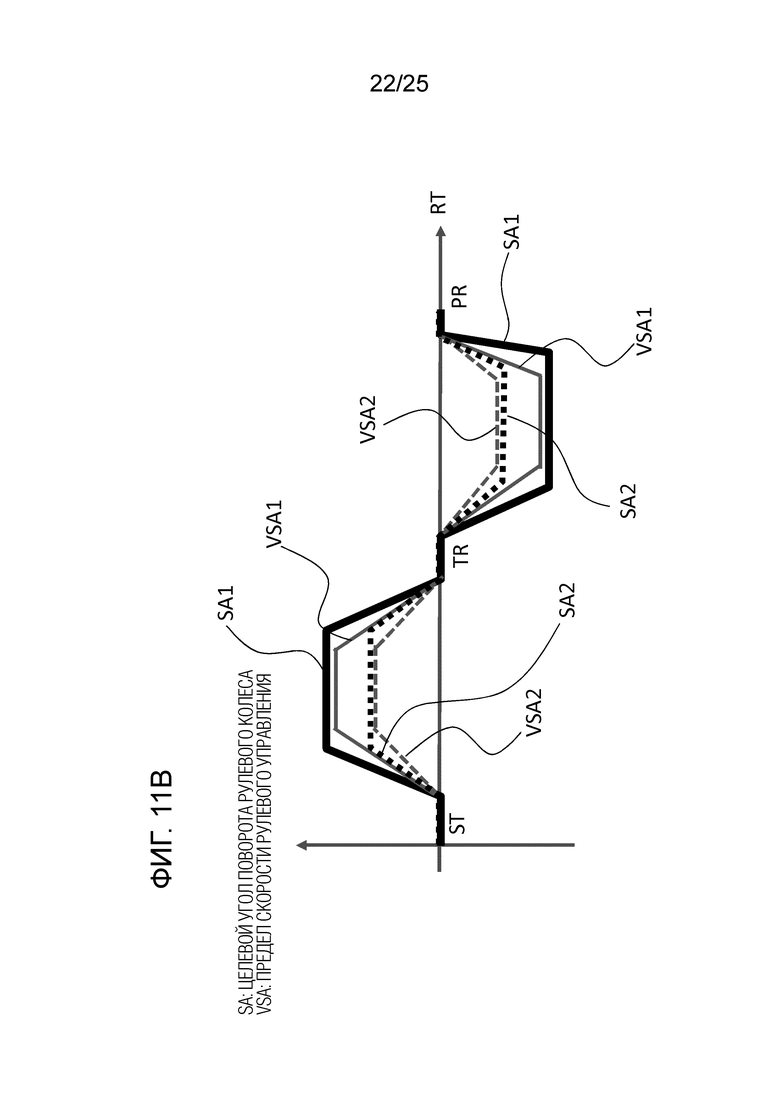
Фиг. 11B – изображение, иллюстрирующее второй пример инструкции управления относительно диапазона скоростей угла поворота рулевого колеса. Диапазон скоростей угла поворота рулевого колеса связан с каждым положением на маршруте RT парковки. На фигуре показаны первая инструкция SA1 управления, вторая инструкция SA2 управления, переходный процесс первого ограничения VSA1 скорости рулевого управления и переходный процесс второго ограничения VSA2 скорости рулевого управления. Второе ограничение VSA2 скорости рулевого управления является более низким значением, чем первое ограничение VSA1 скорости рулевого управления, и можно обнаружить, что величина и скорость рулевого управления во второй инструкции управления малы и низки. Скорость рулевого управления также установлена низкой; следовательно, транспортное средство V перемещается с низкой скоростью угла поворота рулевого колеса и может двигаться медленно/постепенно. Это может облегчить беспокойство оператора М, и таким образом облегчается дистанционное управление.
[0067]
Когда уровень беспокойства не меньше предварительно определенного порогового значения, устройство 10 управления ограничивает количество информации, представленной относительно управления парковкой. Информация относительно управления парковкой включает в себя содержание инструкции управления, диапазон управления инструкции управления, опции меню, опции инструкции управления и т.д.
[0068]
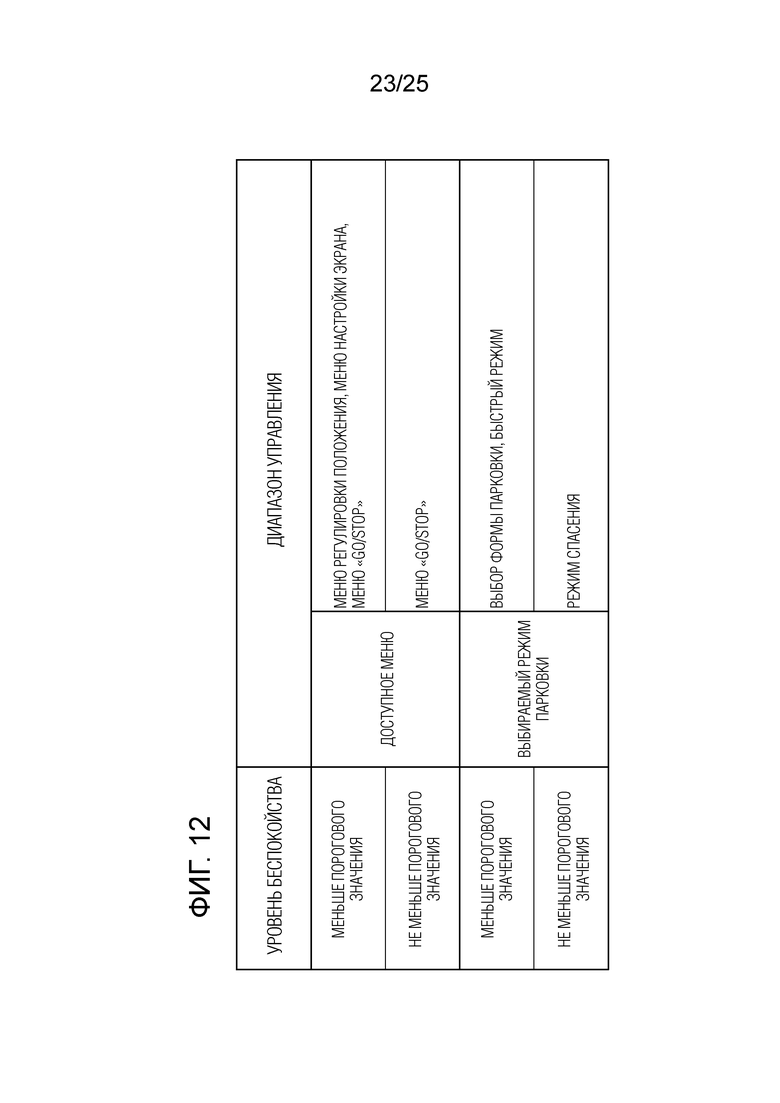
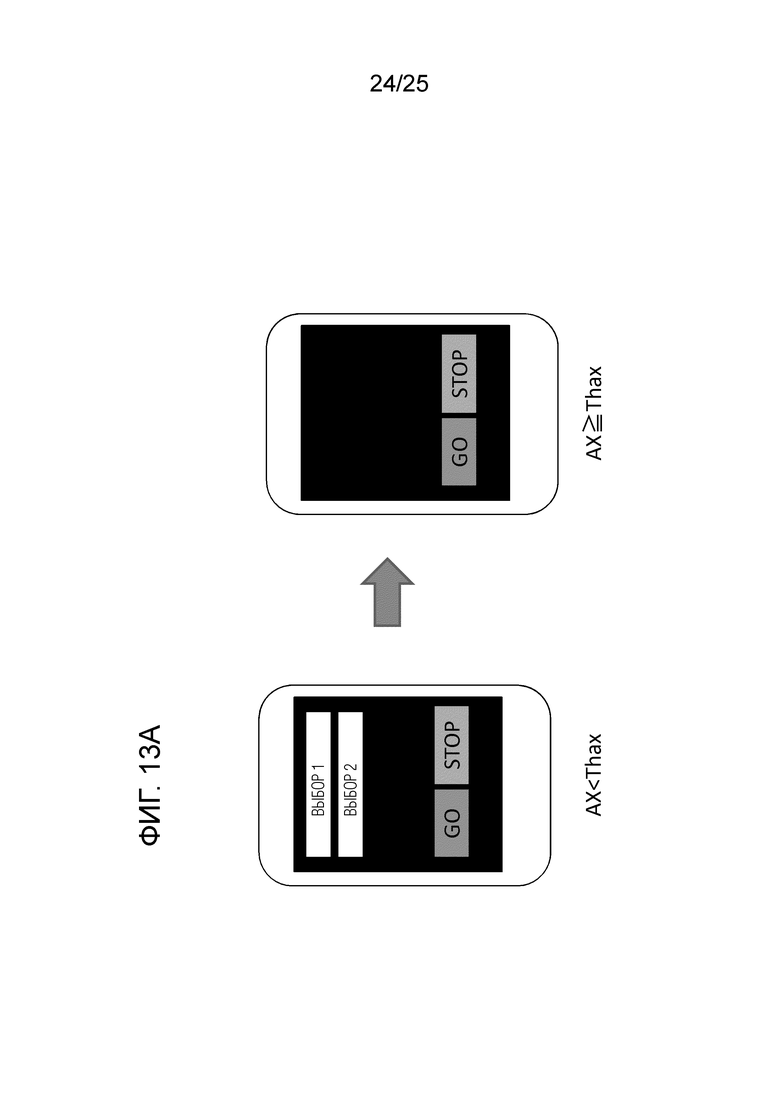
Фиг. 12 является схемой, иллюстрирующей первый пример инструкции управления относительно меню операций. Как показано на фиг. 12, когда уровень беспокойства меньше порогового значения, три меню «меню регулировки положения», «меню настройки экрана» и «GO/STOP» представлены как меню доступных диапазонов управления, но когда уровень беспокойства не менее порогового значения, меню доступных диапазонов управления ограничены, и отображается только меню «GO/STOP». Фиг. 13А иллюстрирует формы ограничения меню доступных диапазонов управления в качестве информации представления. Когда уровень AX беспокойства меньше порогового значения Thax, варианты 1 и 2 представлены в дополнение к «GO/STOP». С другой стороны, когда уровень AX беспокойства не меньше порогового значения Thax, представлено только «GO/STOP».
[0069]
Когда уровень беспокойства меньше порогового значения, три режима «выбора формы парковки», «быстрого режима» и «режима спасения» представляются в качестве выбираемых режимов парковки в диапазонах управления, но когда уровень беспокойства не меньше порогового значения, меню выбираемых диапазонов управления ограничены, и представлен только «режим спасения». Фиг. 13B иллюстрирует формы ограничения режимов выбираемых диапазонов управления в качестве информации представления. Когда уровень AX беспокойства меньше порогового значения Thax, варианты 1 и 2 представлены в дополнение к «режиму спасения». С другой стороны, когда уровень AX беспокойства не меньше порогового значения Thax, представлен только «режим спасения». Как используется в данном документе, режим спасения (режим восстановления) относится к процессу перемещения транспортного средства V в положение, когда начинается процесс парковки. Это управление для перемещения транспортного средства V в исходное положение, в качестве предотвращения чрезвычайной ситуации, когда трудно продолжить процесс парковки.
[0070]
Если большое количество информации представляется оператору M, который чувствует беспокойство, оператор M может быть сбит с толку. Более того, если оператору M, который испытывает беспокойство, представлено много вариантов, оператор M также может быть сбит с толку. Когда уровень беспокойства оператора M не меньше предварительно определенного порогового значения, количество информации, представляемой для диапазона управления инструкции управления, ограничивается таким образом, чтобы оператор M мог сделать соответствующее определение. Это может облегчить беспокойство оператора М, и таким образом облегчается дистанционное управление.
[0071]
Когда уровень беспокойства оператора М не меньше предварительно определенного порогового значения, устройство 10 управления вычисляет вторую инструкцию управления. Устройство 10 управления предварительно хранит информацию о спецификации транспортного средства V, необходимую для инструкции управления. Примеры инструкции управления включают в себя инструкции для величины рулевого управления, скорости рулевого управления, ускорения рулевого управления, положения переключения, скорости (включая ноль), ускорения и замедления транспортного средства V, которые связаны с моментом или положением, когда транспортное средство V перемещается вдоль маршрута парковки и другие инструкции операций. Инструкция управления включает в себя время выполнения или положение выполнения вышеупомянутой инструкции операции для транспортного средства V. Инструкция, касающаяся маршрута парковки, и инструкция операции, связанная с маршрутом парковки, выполняются транспортным средством V, и, таким образом, транспортное средство может перемещаться (парковаться) до целевого парковочного положения.
[0072]
Обращаясь снова к фиг. 4, оператор M подтверждает маршрут парковки на этапе 108, и когда инструкция выполнения вводится на этапе 109, процесс переходит к этапу 110, на котором устройство 10 управления начинает выполнение управления парковкой.
[0073]
На этапе 111 устройство 10 управления периодически вычисляет уровень беспокойства. Уровень беспокойства оператора М изменяется в зависимости от изменения положения препятствия и положения транспортного средства V. Чтобы отреагировать на изменение ситуации, устройство 10 управления вычисляет уровень беспокойства оператора М в заранее определенном цикле. На этапе 112 устройство 10 управления определяет, произошло ли изменение уровня беспокойства. Когда есть изменение, маршрут парковки и инструкция управления для перемещения вдоль маршрута парковки вычисляются снова. Когда можно вычислить новый подходящий маршрут парковки, используется новый маршрут парковки. Устройство 10 управления вычисляет инструкцию управления для нового маршрута парковки. На этапе 113 устройство 10 управления обновляет маршрут парковки и инструкцию управления, которые вычисляются на этапе 107, до нового маршрута парковки и новой инструкции управления. На этапе 112, когда не происходит изменения уровня беспокойства, нет необходимости вычислять новый маршрут парковки и новую инструкцию управления, поэтому процесс переходит к этапу 114.
[0074]
На этапе 114 устройство 10 управления контролирует изменение уровня беспокойства, пока транспортное средство V не достигнет положения поворота для парковки. Когда транспортное средство V достигает положения поворота для парковки, переключение передач, включенное в инструкцию управления, выполняется на этапе 115. За этапом 115 следует этап 116, на котором управление парковкой завершается путем последовательного выполнения инструкций управления.
[0075]
Оборудование 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения функционирует с возможностью управления работой системы 40 привода через контроллер 70 транспортного средства в соответствии с инструкцией управления, так что транспортное средство V перемещается по маршруту парковки. Оборудование 100 управления парковкой функционирует для вычисления командных сигналов для системы 40 привода транспортного средства V, такой как мотор EPS, с одновременной передачей обратно выходного значения датчика 50 угла поворота рулевого колеса оборудования рулевого управления, чтобы определить, что траектория движения транспортного средства V совпадает с вычисленным маршрутом парковки и передает командные сигналы в систему 40 привода или в контроллер 70 транспортного средства, который управляет системой 40 привода.
[0076]
Оборудование 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя блок управления для управления парковкой. Блок управления для управления парковкой получает информацию о диапазоне переключения передач от блока управления AT/CVT, информацию о скорости вращения колес от блока управления ABS, информацию о угле поворота рулевого колеса от блока управления углом поворота рулевого колеса , информацию о частоте вращения двигателя от ECM и другую необходимую информацию. На основе этих информационных элементов блок управления для управления парковкой вычисляет и выводит информацию о инструкциях автономного рулевого управления на блок управления EPS, информацию о инструкциях, такую как предупреждение для блока управления счетчиком и т.д. Устройство 10 управления получает информационные элементы, которые получают датчиком 50 угла поворота рулевого колеса оборудования рулевого управления транспортного средства V, датчиком 60 скорости транспортного средства и другими датчиками транспортного средства V через контроллер 70 транспортного средства.
[0077]
Система 40 привода в соответствии с одним или несколькими вариантами осуществления настоящего изобретения приводит в движение транспортное средство V1 для перемещения (движения) из текущего положения в целевое положение парковки путем приведения в движение на основе сигналов команды управления, полученных от оборудования 100 управления парковкой. Оборудование рулевого управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой приводной механизм, который перемещает транспортное средство V в правом и левом направлениях. Мотор EPS, включенный в систему 40 привода, приводит в действие механизм гидроусилителя рулевого управления оборудования рулевого управления на основе сигналов команды управления, полученных от оборудования 100 управления парковкой, для управления величиной рулевого управления и управления работой при перемещении транспортного средства V в целевое положение парковки. Контент управления и схема работы для парковки транспортного средства V конкретно не ограничены, и любая схема, известная на момент подачи этой заявки, может быть соответствующим образом применена.
[0078]
Когда оборудование 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения работает, чтобы управлять транспортным средством V для перемещения в целевое положение парковки по маршруту, вычисленному на основе положения транспортного средства V и целевого положения парковки, акселератор и тормоз управляются автономно на основе назначенной скорости управления транспортным средством (заданной скорости транспортного средства), а работа оборудования рулевого управления управляет перемещением транспортного средства V автономным способом в соответствии с скоростью транспортного средства.
[0079]
Способ управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения используется в оборудовании управления парковкой, как указано выше, и поэтому проявляет следующие эффекты. Оборудование 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения сконфигурировано и работает, как указано выше, и, следовательно, проявляет следующие эффекты.
[0080]
(1) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда уровень беспокойства не меньше предварительно определенного порогового значения, вычисляется вторая инструкция управления, которая получается посредством ограничения диапазона управления первой инструкции управления, которая предварительно задана в инструкции управления. Когда уровень беспокойства меньше предварительно определенного порогового значения, и оператор М, который выполняет дистанционное управление, не чувствует беспокойства, транспортное средство паркуется в соответствии с первой инструкцией управления, которая предварительно задана в инструкции управления, тогда как, когда уровень беспокойства не меньше предварительно определенного порогового значения, и оператор М чувствует беспокойство, вычисляется другая вторая инструкция управления, которая получается путем ограничения диапазона управления первой инструкции управления. Новая вторая инструкция управления обеспечивает диапазон управления, в котором беспокойство оператора М относительно дистанционного управления управлением парковкой более ослаблено, чем то, которое обеспечивается первой инструкцией управления. Например, диапазон управления, который включает диапазон скоростей перемещения, диапазон ускорения/замедления, диапазон скоростей поворота (скорость рулевого управления) и диапазон количества отображаемой информации, изменяется на более низкое значение. В частности, верхний предел каждого диапазона управления понижается. Кроме того, нижний предел каждого диапазона управления может быть уменьшен. Таким образом, изменяя диапазон управления инструкции управления на низкий, чтобы уменьшить беспокойство оператора М, можно уменьшить беспокойство оператора М и облегчить дистанционное управление.
[0081]
(2) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения вторая инструкция управления вычисляется так, что второй диапазон скоростей, включенный во вторую инструкцию управления, ниже, чем первый диапазон скоростей, включенный в первую инструкцию управления. В качестве примера, вторая инструкция управления вычисляется так, что вторая верхняя предельная скорость, включенная во вторую инструкцию управления, ниже, чем первая верхняя предельная скорость, включенная в первую инструкцию управления. Оператор М контролирует перемещение транспортного средства V, которым нужно управлять. Чем выше диапазон скоростей (верхняя предельная скорость/нижняя предельная скорость) транспортного средства V, тем сложнее контролировать транспортное средство V. Когда оператор М чувствует беспокойство, диапазон скоростей во время перемещения транспортного средства V, которое должно быть припарковано, изменяется на низкое значение. Таким образом, беспокойство оператора М может быть уменьшено, и дистанционное управление облегчено.
Например, устройство 10 управления вычисляет вторую инструкцию управления так, что вторая верхняя предельная скорость, включенная во вторую инструкцию управления, ниже, чем первая верхняя предельная скорость, включенная в первую инструкцию управления. Когда оператор М чувствует беспокойство, верхняя предельная скорость во время перемещения транспортного средства V, подлежащего парковке, изменяется на низкую; следовательно, беспокойство оператора M может быть ослаблено, и, таким образом, облегчается дистанционное управление.
[0082]
(3) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения устройство 10 управления устанавливает второй диапазон скоростей (верхняя предельная скорость и/или нижняя предельная скорость) на более низкое значение с повышением уровня беспокойства оператора М, и, следовательно, транспортное средство V может перемещаться медленнее, поскольку беспокойство, испытываемое оператором М, больше. Это может облегчить беспокойство оператора М, и таким образом облегчается дистанционное управление.
[0083]
(4) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда определяется, что оператор М испытывает беспокойство, предварительно заданный первый диапазон расстояния запаса изменяется на второй диапазон расстояния запаса, более длинный, чем первый диапазон расстояния запаса. Посредством расширения зазора от препятствия, оператор М, который чувствует беспокойство, может выполнять дистанционное управление с облегчением. Оператор M может выполнять операцию, подтверждая препятствие и транспортное средство V, движущееся по маршруту парковки, и, таким образом, облегчается дистанционное управление.
[0084]
(5) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения второй диапазон расстояния запаса устанавливается на большее расстояние (большее значение), поскольку уровень беспокойства, который представляет собой степень беспокойства, испытываемого оператором М, выше. То есть, чем больше беспокойство оператора М, тем шире устанавливается зазор от препятствия. Фиг.8B - изображение, иллюстрирующее взаимосвязь между уровнем AX беспокойства и расстоянием OBD запаса маршрута парковки. Как показано на фиг. 8B, по мере того как уровень беспокойства увеличивается, устанавливается большее значение расстояния OBD запаса, и вычисляется маршрут парковки, вдоль которого обеспечивается расстояние OBD запаса. Чем выше уровень беспокойства, тем больше установлен второй диапазон расстояния запаса, так что беспокойство, испытываемое оператором М, может быть уменьшено.
[0085]
(6) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения уровень беспокойства оператора M может быть вычислен на основе временного изменения положения оператора M, и, следовательно, управление парковкой может исполняться в соответствии с уровнем беспокойства оператора М.
[0086]
(7) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения величина перемещения оператора М, который чувствует беспокойство, имеет тенденцию быть больше, чем обычно. Уровень беспокойства оператора М может быть вычислен на основе величины перемещения, и поэтому управление парковкой может быть выполнено в соответствии с уровнем беспокойства оператора М.
[0087]
(8) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения оператор М, который чувствует беспокойство во время дистанционного управления, имеет тенденцию бегать с короткими шагами и перемещаться быстрее, чем при нормальной ходьбе, имеет тенденцию повторять остановку и движение и перемещаться с большим ускорением, чем при нормальной ходьбе, имеет тенденцию перемещаться вперед и назад в различных направлениях или имеет тенденцию изменять направление перемещения через короткие промежутки времени. Уровень беспокойства оператора M может быть вычислен на основе «величины поведения (величины перемещения из–за поведения)», включающего в себя любое одно или более из скорости перемещения, ускорения перемещения, величины изменения направления перемещения и величины изменения положения оператора M по высоте, и, следовательно, управление парковкой может выполняться в соответствии с уровнем беспокойства оператора M.
[0088]
(9) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения оператор М, который чувствует беспокойство во время дистанционного управления, имеет тенденцию перемещаться в различных направлениях, а не выполнять направленное перемещение. Уровень беспокойства оператора M может быть вычислен на основе значения дисперсии положения присутствия, и поэтому управление парковкой может быть выполнено в соответствии с уровнем беспокойства оператора М.
[0089]
(10) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, если большой объем информации представляется оператору M, который чувствует беспокойство, оператор M может быть сбит с толку. Более того, если оператору M, который испытывает беспокойство, представлено много вариантов, оператор M также может быть сбит с толку. Когда уровень беспокойства оператора M не меньше предварительно определенного порогового значения, объем информации, представляемой для управления парковкой, ограничивается, таким образом, чтобы оператор M мог сделать соответствующее определение. Это может облегчить беспокойство оператора М, и таким образом облегчается дистанционное управление.
[0090]
(11) Также в оборудовании 100 управления парковкой, в котором выполняется способ в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, демонстрируются действия и эффекты, как описано в вышеприведенных пунктах (1) – (10).
[0091]
Варианты осуществления, описанные выше, описаны для облегчения понимания настоящего изобретения и не описаны для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, чтобы подпадать под объем технических сведений в настоящем изобретении.
[Описание ссылочных обозначений]
[0092]
1000 Система управления парковкой
100 Оборудование управления парковкой
10 Устройство управления
11 CPU
12 ROM
13 RAM
132 Запоминающее устройство
133 Картографическая информация
134 Информация о парковке
135 Информация о препятствиях
20 Устройство ввода
21 Устройство связи
211 Антенны
30 Устройство вывода
31 Дисплей
1a – 1d камеры
2 Устройства определения дальности
3 Информационный сервер
31 Устройство связи
32 Запоминающее устройство
33 Картографическая информация
34 Информация о парковке
35 Информация о препятствиях
5 Операционный терминал
51 Устройство связи
511 Антенна
52 Устройство ввода
53 Дисплей
200 Бортовое устройство
40 Система привода
50 Датчик угла поворота рулевого колеса
60 Датчик скорости транспортного средства
70 Контроллер транспортного средства
V, V1 Транспортное средство
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2738780C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2735340C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2730808C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736518C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740111C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2742530C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740661C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736960C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2746684C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736520C1 |
Группа изобретений относится к способу управления парковкой для выполнения инструкции управления для перемещения транспортного средства (V) по маршруту (RT) парковки на основе команды операции, полученной от оператора (M), расположенного вне транспортного средства (V), и устройству для его осуществления. Этот способ включает в себя обнаружение перемещения оператора (M); вычисление уровня беспокойства оператора (M) по перемещению оператора (M); и когда уровень беспокойства меньше предварительно определенного порогового значения, парковку транспортного средства в соответствии с первой инструкцией управления, которая предварительно задана в инструкции управления, в то время как, когда уровень беспокойства не меньше предварительно определенного порогового значения, вычисление второй инструкции управления, полученной посредством ограничения диапазона управления первой инструкции управления, и парковку транспортного средства (V) в соответствии со второй инструкцией управления. Обеспечивается удобство и безопасность удаленной парковки. 2 н. и 9 з.п. ф-лы, 13 ил.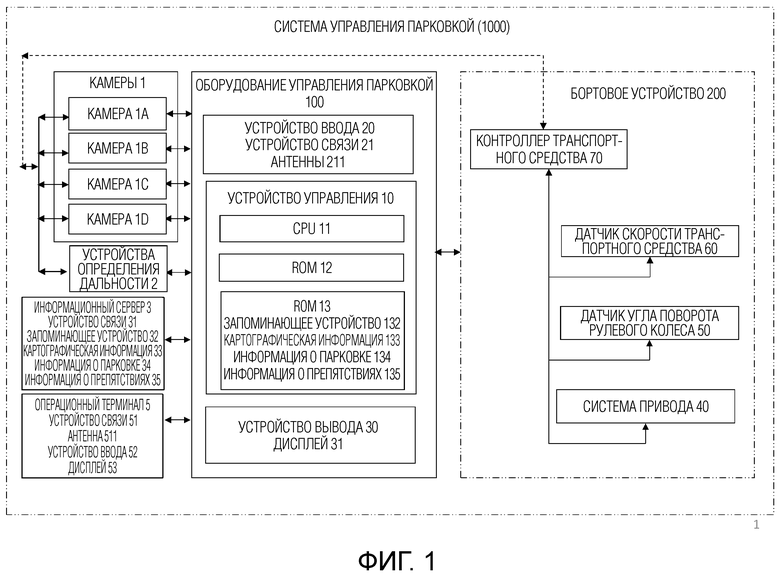
1. Способ управления парковкой для выполнения инструкции управления для перемещения транспортного средства по маршруту парковки на основе команды операции, полученной от оператора, расположенного вне транспортного средства, содержащий этапы, на которых:
обнаруживают перемещение оператора;
вычисляют уровень беспокойства оператора по перемещению оператора и,
когда уровень беспокойства меньше предварительно определенного порогового значения, осуществляют парковку транспортного средства в соответствии с первой инструкцией управления, которая предварительно задана в инструкции управления, в то время как, когда уровень беспокойства не меньше предварительно определенного порогового значения, вычисляют вторую инструкцию управления, полученную посредством ограничения диапазона управления первой инструкции управления, и осуществляют парковку транспортного средства в соответствии со второй инструкцией управления.
2. Способ управления парковкой по п.1, содержащий
вычисление второй инструкции управления таким образом, чтобы второй диапазон скоростей, который является диапазоном управления, включенным во вторую инструкцию управления, был ниже, чем первый диапазон скоростей, который является диапазоном управления, включенным в первую инструкцию управления.
3. Способ управления парковкой по п.2, содержащий
понижение второго диапазона скоростей по мере повышения уровня беспокойства.
4. Способ управления парковкой по п.1, содержащий:
обнаружение препятствия, существующего вокруг транспортного средства; и,
когда уровень беспокойства составляет не меньше предварительно определенного порогового значения, вычисление второго маршрута парковки так, чтобы второй диапазон расстояния запаса между вторым маршрутом парковки и препятствием был больше, чем первый диапазон расстояния запаса между первым маршрутом парковки и препятствием, причем второй диапазон расстояния запаса является диапазоном управления, включенным во вторую инструкцию управления, причем первый диапазон расстояния запаса является диапазоном управления, включенным в предварительно заданную первую инструкцию управления.
5. Способ управления парковкой по п.4, содержащий
установку второго диапазона расстояния запаса на большее расстояние по мере повышения уровня беспокойства.
6. Способ управления парковкой по любому из пп.1-5, содержащий
вычисление уровня беспокойства оператора на основе временного изменения положения оператора.
7. Способ управления парковкой по любому из пп.1-5, содержащий
вычисление уровня беспокойства оператора на основе величины перемещения оператора.
8. Способ управления парковкой по любому из пп.1-5, содержащий
вычисление уровня беспокойства оператора на основе величины поведения оператора.
9. Способ управления парковкой по любому из пп.1-5, содержащий
вычисление уровня беспокойства оператора на основе распределения положения присутствия оператора.
10. Способ управления парковкой по п.1, содержащий,
когда уровень беспокойства не меньше предварительно определенного порогового значения, ограничение количества информации, представляемой для управления парковкой.
11. Оборудование управления парковкой, содержащее устройство управления, выполненное с возможностью исполнения инструкции управления для перемещения транспортного средства по маршруту парковки на основе команды операции, полученной от оператора, расположенного вне транспортного средства, причем устройство управления работает, чтобы:
обнаружить перемещение оператора;
вычислить уровень беспокойства оператора по перемещению оператора и,
когда уровень беспокойства меньше предварительно определенного порогового значения, парковать транспортное средство в соответствии с первой инструкцией управления, которая предварительно задана в инструкции управления, в то время как, когда уровень беспокойства не меньше предварительно определенного порогового значения, вычислять вторую инструкцию управления, полученную посредством ограничения диапазона управления первой инструкции управления, и парковать транспортное средство в соответствии со второй инструкцией управления.
| JP 2017007399 A, 12.01.2017 | |||
| JP 2014146288 A, 14.08.2014 | |||
| JP 2008174192 A, 31.07.2008 | |||
| JP 2010018167 A, 28.01.2010 | |||
| JP 2017030481 A, 09.02.2017. |

