[Область техники, к которой относится изобретение]
[0001]
Настоящее изобретение относится к способу управления парковкой и устройству управления парковкой.
[Уровень техники]
[0002]
Известна технология, в которой, когда транспортное средство паркуется в месте для парковки посредством управления извне транспортного средства, осуществляется управление транспортным средством для выполнения остановки, если в окружении транспортного средства обнаружен объект (патентный документ 1).
[Документ из уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2008-074296A
[Раскрытие изобретения]
[Проблемы, решаемые изобретением]
[0004]
В вышеупомянутом уровне техники управление транспортным средством осуществляется таким образом, чтобы оно выполняло остановку, даже когда оператор желает продолжить управление парковкой, поэтому автономное (автоматическое) управление парковкой может не выполняться в соответствии с намерением оператора.
[0005]
Задача, решаемая настоящим изобретением, состоит в том, чтобы подтвердить намерение оператора при обнаружении объекта и выполнить управление автономной парковкой в соответствии с намерением оператора.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает вышеуказанную задачу при обнаружении объекта после начала выполнения первой команды управления для движения транспортного средства по первому маршруту к целевому парковочному месту, посредством представления оператору информации для выбора первого режима, в котором продолжается выполнение первой команды управления, или второго режима, в котором выполняется альтернативная команда управления для движения транспортного средства по альтернативному маршруту, отличному от первого маршрута, и побуждения устройства управления выполнять выбранную первую команду управления или альтернативную команду управления.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению, когда обнаружен объект, продолжается выполняемая команда управления или выполняется альтернативная команда управления для движения транспортного средства по альтернативному маршруту на основании выбора, введённого оператором, и таким образом процесс парковки может выполняться в соответствии с намерением оператора без остановки транспортного средства во всех случаях.
[Краткое описание чертежей]
[0008]
Фиг. 1 - блок-схема, иллюстрирующая пример системы управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения.
Фиг. 2А - схема для описания первой схемы обнаружения для положения оператора.
Фиг. 2B - схема для описания второй схемы обнаружения для положения оператора.
Фиг. 2C - схема для описания третьей схемы обнаружения для положения оператора.
Фиг. 2D - схема для описания четвертой схемы обнаружения для положения оператора.
Фиг. 3А - схема для описания первой схемы обнаружения для объекта.
Фиг. 3B - схема для описания второй схемы обнаружения для объекта.
Фиг.4 - блок-схема, иллюстрирующая пример процедуры управления, выполняемой системой управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения.
Фиг. 5 - блок-схема, иллюстрирующая пример процесса управления парковкой на основании информации выбора.
Фиг. 6 - блок-схема, иллюстрирующая пример процесса представления информации выбора.
Фиг. 7А - первая схема для описания первого процесса представления для информации выбора.
Фиг. 7B - вторая схема для описания первого процесса представления для информации выбора.
Фиг. 7C - третья схема для описания первого процесса представления для информации выбора.
Фиг. 8А - первая схема для описания второго процесса представления для информации выбора.
Фиг. 8B - вторая схема для описания второго процесса представления для информации выбора.
Фиг. 9А - первая схема для описания третьего процесса представления для информации выбора.
Фиг. 9B - вторая схема для описания третьего процесса представления для информации выбора.
Фиг. 10А - первая схема для описания четвертого процесса представления для информации выбора.
Фиг. 10B - вторая схема для описания четвертого процесса представления для информации выбора.
Фиг. 11А - первая схема для описания пятого процесса представления для информации выбора.
Фиг. 11B - вторая схема для описания пятого процесса представления для информации выбора.
[Осуществление изобретения]
[0009]
Далее один или более вариантов осуществления настоящего изобретения будут описаны с обращением к чертежам.
В вариантах осуществления настоящее изобретение будет описано с использованием в качестве примера случая, в котором устройство управления парковкой в соответствии с настоящим изобретением применяется в системе управления парковкой. Устройство управления парковкой также может быть применено в портативном терминале управления (в устройстве, таком как смартфон или КПК: карманный персональный компьютер), способном обмениваться информацией с бортовым устройством. Способ управления парковкой в соответствии с настоящим изобретением может использоваться в устройстве управления парковкой, которое будет описано ниже.
[0010]
На фиг.1 показана блок-схема системы 1000 управления парковкой, включающей в себя устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения. Система 1000 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя камеры 1a-1d, устройства 2 измерения расстояния, информационный сервер 3, терминал 5 управления, устройство 100 управления парковкой, контроллер 70 транспортного средства, систему 40 привода, датчик 50 угла рулевого управления и датчик 60 скорости транспортного средства.
[0011]
Устройство 100 управления парковкой согласно одному или более вариантам осуществления настоящего изобретения побуждает устройство управления (ECU: блок управления двигателем) транспортного средства выполнять первую команду управления (команду управления парковкой) для движения транспортного средства в качестве цели управления по первому маршруту к целевому парковочному месту (парковке) на основании операционной команды, полученной от оператора. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения управляет операцией движения (парковки) транспортного средства V в качестве цели управления в целевое парковочное место на основании операционной команды, вводимой с терминала 5 управления.
[0012]
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения управляет операцией движения транспортного средства V таким образом, чтобы побудить транспортное средство V покинуть целевое парковочное место (так, чтобы отделить транспортное средство V от целевого парковочного места), (так что транспортное средство V находится/становится отдаленным от целевого парковочного пространства), (так, чтобы транспортное средство V покинуло целевое парковочное место) на основании операционной команды, которая вводится в терминал 5 управления оператором M, расположенным вне транспортного средства V. Один или более вариантов осуществления настоящего изобретения будут описаны с обращением к примерному случаю, в котором оператор М находится вне транспортного средства V, но оператор М может находиться и внутри салона транспортного средства V1. В другом случае пользователи, включая водителя, могут находиться внутри салона транспортного средства, а оператор М (например, управляющий парковкой) может находиться вне транспортного средства.
[0013]
Терминал 5 управления представляет собой портативный компьютер, который может быть выведен наружу из транспортного средства V и имеет функцию ввода и функцию связи. Терминал 5 управления принимает ввод операционной команды, сделанный оператором M, для управления движением (работой) транспортного средства V для парковки. Движение включает в себя операции для парковки (операции для въезда на парковочное место и выезда с парковочного места). Оператор М вводит команды через терминал 5 управления. Команды включают в себя операционную команду для выполнения парковки. Операционная команда включает в себя информацию о выполнении/прекращении управления парковкой, выборе/изменении целевого положения парковки и выборе/изменении маршрута парковки и другую информацию, необходимую для парковки. Оператор M также может побуждать устройство 100 управления парковкой распознавать команды, включающие в себя операционную команду, без использования терминала 5 управления, например, посредством признаков снятого изображения жеста, сделанного оператором M (то есть оператор M может ввести такую команду в устройство 100 управления парковкой без использования терминала 5 управления (например, жестом). Примеры операционных команд, которые вводятся оператором М через терминал 5 управления, включают в себя не только операционную команду для выполнения парковки, но также команду эвакуации для покидания транспортным средством V целевого парковочного места.
[0014]
Терминал 5 управления включает в себя устройство связи и способен обмениваться информацией с устройством 100 управления парковкой и информационным сервером 3. Терминал 5 управления передает операционную команду, которая вводится извне транспортного средства, в устройство 100 управления парковкой через сеть связи, и вводит операционную команду в устройство 100 управления парковкой. Терминал 5 управления осуществляет связь с устройством 100 управления парковкой, используя сигналы, включающие в себя уникальный идентификационный код. Терминал 5 управления включает в себя дисплей 53. Дисплей 53 представляет интерфейс ввода и различные информационные элементы. Когда дисплей 53 является дисплеем типа сенсорной панели, он имеет функцию приема операционной команды. Терминал 5 управления может быть портативным устройством, таким как смартфон или КПК: карманный персональный компьютер, в котором установлены приложения для приема ввода операционной команды, используемой в способе управления парковкой, в соответствии с одним или более вариантами осуществления настоящего изобретения, и передачи операционной команды в устройство 100 управления парковкой.
[0015]
Информационный сервер 3 является устройством обеспечения информации, предусмотренным в сети, обеспечивающей возможность осуществления связи. Информационный сервер 3 включает в себя устройство 31 связи и запоминающее устройство 32. Запоминающее устройство 32 включает в себя считываемую картографическую информацию 33, информацию 34 о парковке и информацию 35 об объектах. Устройство 100 управления парковкой и терминал 5 управления могут осуществлять доступ к запоминающему устройству 32 информационного сервера 3 для получения каждого элемента информации.
[0016]
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя устройство 10 управления, устройство 20 ввода и устройство 30 вывода. Эти компоненты устройства 100 управления парковкой соединены друг с другом через локальную сеть контроллеров (CAN) или другую бортовую локальную сеть для взаимного обмена информацией. Устройство 20 ввода включает в себя устройство 21 связи. Устройство 21 связи принимает операционную команду, переданную от внешнего терминала 5 управления, и вводит операционную команду в устройство 20 ввода. Субъектом, который вводит операционную команду во внешний терминал 5 управления, может быть человек (пользователь, пассажир, водитель или работник парковочного объекта). Устройство 20 ввода передает принятую рабочую команду на устройство управления. Устройство 30 вывода включает в себя дисплей 31. Устройство 30 вывода сообщает водителю информацию управления парковкой. Дисплей 31 в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой дисплей типа сенсорной панели, имеющий функцию ввода и функцию вывода. Когда дисплей 31 имеет функцию ввода, он служит в качестве устройства 20 ввода. Даже когда управление транспортным средством V осуществляется на основании операционной команды, которая вводится с терминала 5 управления, пользователь (водитель или пассажир) может вводить операционную команду, такую как команда экстренной остановки, через устройство 20 ввода.
[0017]
Устройство 10 управления устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой компьютер для управления парковкой, включающий в себя ПЗУ 12, в котором хранится программа управления парковкой, ЦП 11 в качестве схемы управления, которая выполняет сохраненную в ПЗУ программу, чтобы служить в качестве устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, и ОЗУ 13, которое служит в качестве запоминающего устройства с возможностью доступа.
[0018]
Программа управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя исполняемые команды для вычисления первой команды управления для движения транспортного средства V в качестве цели управления по первому маршруту к целевому месту парковки на основании операционной команды, полученной от оператора М; побуждения устройства управления транспортного средства V выполнять первую команду управления; при обнаружении объекта после начала выполнения первой команды управления - представления оператору М информации выбора для выбора первого режима, в котором продолжается выполнение первой команды управления, или второго режима, в котором устройство управления транспортным средством V побуждают выполнять альтернативную команду управления для движения транспортного средства V по альтернативному маршруту, отличному от первого маршрута; и побуждения устройства управления выполнять первую команду управления или альтернативную команду управления в соответствии с вводимой информацией выбора от оператора М.
[0019]
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения является устройством дистанционного управления, которое принимает команду управления от терминала 5 управления и управляет движением транспортного средства V для парковки транспортного средства V в заданном парковочном месте. Пользователь, который управляет терминалом 5 управления, может быть расположен за пределами салона транспортного средства или также может быть расположен внутри салона транспортного средства.
[0020]
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения может быть устройством управления автономного (автоматизированного) типа, в котором управление рулем и ускорение/торможение выполняются автономным (автоматическим) образом. Устройство 100 управления парковкой также может быть устройством управления полуавтономного (полуавтоматического) типа, в котором операция рулевого управления выполняется автономно, в то время как операцию ускорения/торможения выполняет водитель.
В программе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения пользователь может произвольно выбирать целевое положение парковки, или устройство 100 управления парковкой или сторона парковочного объекта могут автоматически устанавливать целевое положение парковки.
[0021]
Устройство 10 управления устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения имеет функции выполнения первого процесса управления для перемещения транспортного средства V по первому маршруту в целевое парковочное место на основании операционной команды, полученной от оператора М, процесса представления информации о выборе на дисплее 53 терминала 5 управления, когда после начала выполнения первой команды управления обнаружен объект, и процесс управления парковкой для выполнения первой команды управления или альтернативной команды управления в соответствии с вводимой информацией выбора от оператора М. Информация выбора относится к информации для выбора первого режима, в котором продолжается выполнение первой команды управления, или второго режима, в котором выполняется альтернативная команда управления для движения транспортного средства V по альтернативному маршруту, отличному от первого маршрута. Каждый из вышеупомянутых процессов выполняется посредством взаимодействия программного обеспечения для реализации процесса и вышеописанного аппаратного обеспечения.
[0022]
Некоторые процессы определения положения оператора М будут описаны с обращением к фиг. 2А в 2D. Устройство 10 управления получает положение оператора М. Положение оператора М используется для вычисления места эвакуации. Положение оператора M включает в себя информацию о положении транспортного средства V на плоскости движения. Положение оператора M включает в себя информацию о положении по высоте. Положение оператора M может быть обнаружено на основании сигналов датчиков от датчиков, предусмотренных в транспортном средстве V, или также может быть получено путем обнаружения положения терминала 5 управления, носимого оператором M, и вычисления положения оператора M на основании положения терминала 5 управления. Терминал 5 управления может быть предусмотрен в заданном положении или может также переноситься оператором М. Когда терминал 5 управления предусмотрен в заданном положении, оператор М перемещается в положение, в котором предусмотрен терминал 5 управления, и использует терминал 5 управления в этом положении. В этих случаях положение терминала 5 управления может использоваться как положение оператора М.
[0023]
Как проиллюстрировано на фиг. 2А, положение оператора М определяется на основании результатов обнаружения от множества устройств 2 измерения расстояния, предусмотренных в транспортном средстве, и/или изображений, снятых камерами 1. Положение оператора М может быть обнаружено на основании изображений, снятых камерами 1a-1d. Каждое из устройств 2 измерения расстояния, подлежащих использованию, может представлять собой радарное устройство, такое как радарное устройство миллиметрового диапазона, лазерное радарное устройство или ультразвуковое радарное устройство, или устройство-сонар. Множество устройств 2 измерения расстояния и их результаты обнаружения могут быть идентифицированы, и таким образом на основании результатов обнаружения может быть обнаружено двумерное положение и/или трехмерное положение оператора M. Устройства 2 измерения расстояния могут быть предусмотрены в тех же положениях, что и камеры 1a-1d, или могут также быть предусмотрены в других положениях. Устройство 10 управления также может обнаруживать жест оператора M на основании изображений, снятых камерами 1a-1d, и идентифицировать операционную команду, связанную с признаками изображения жеста.
[0024]
Как проиллюстрировано на фиг. 2B, положение терминала 5 управления или оператора M, несущего терминал 5 управления, также может быть обнаружено на основании радиоволн связи между множеством антенн 211, предусмотренных в различных положениях транспортного средства V и терминала 5 управления. Когда множество антенн 211 осуществляют связь с одним терминалом 5 управления, интенсивность принимаемой радиоволны для каждой антенны 211 является различной. Положение терминала 5 управления может быть вычислено на основании различия в интенсивности между принимаемыми радиоволнами антенн 211. Двумерное положение и/или трехмерное положение терминала 5 управления или оператора М может быть вычислено из разности интенсивности между принятыми радиоволнами антенн 211.
[0025]
Как проиллюстрировано на фиг. 2C, заданное положение (направление/расстояние: D1, D2) относительно водительского сиденья DS транспортного средства V могут быть заранее указаны как рабочее положение оператора M или как положение, в котором расположен терминал 5 управления. Например, когда оператор М временно останавливает транспортное средство V в указанном положении и выходит из транспортного средства V, чтобы управлять терминалом 5 управления, предусмотренным в заданном положении, можно вычислить начальное положение оператора М относительно транспортного средства V или начальное положение терминала 5, носимого оператором М, относительно транспортного средства V.
[0026]
Как аналогичным образом проиллюстрировано на фиг. 2D, информация изображения, представляющая рабочее положение (положение, в котором стоит оператор M: рабочее положение) относительно транспортного средства V, отображается на дисплее 53 терминала 5 управления. Это управление отображением может выполняться приложением, установленным на стороне терминала 5 управления, или также может выполняться на основании команды от устройства 10 управления.
[0027]
Процесс обнаружения объектов будет описан с обращением к фиг. 3А и 3В. В одном или более вариантах осуществления настоящего изобретения «объекты» включают в себя конструкции, такие как стены и опоры парковки, сооружения вокруг транспортного средства, пешеходов, другие транспортные средства, припаркованные транспортные средства и т.п.
Как проиллюстрировано на фиг. 3А, объект обнаруживается на основании результатов обнаружения посредством множества устройств 2 измерения расстояния, предусмотренных в транспортном средстве V, и/или изображений, снятых камерами 1. Устройства 2 измерения расстояния обнаруживают присутствие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта на основании принятых сигналов от радарных устройств. В качестве дополнения или альтернативы, присутствие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта могут быть обнаружены на основании изображений, снятых камерами 1a-1d. Обнаружение объекта может быть выполнено с использованием технологии стереосъёмки движения посредством камер 1a-1d. Результаты обнаружения используются для определения, является ли парковочное место пустым (припарковано ли на парковочном месте транспортное средство).
[0028]
Как проиллюстрировано на фиг. 3B, объекты, включающие в себя конструкции, такие как стены и опоры парковки, могут быть обнаружены на основании информации 34 о парковке, полученной из запоминающего устройства 32 информационного сервера 3. Информация о парковке включает в себя местоположение и идентификационный номер каждой парковки, и информацию о положении проездов, опор, стен, мест для хранения и т.п. в парковочном объекте. Управление информационным сервером 3 может осуществляться персоналом парковки.
[0029]
Процедура управления для управления парковкой будет описана ниже с обращением к блок-схеме, показанной на фиг. 4.
На фиг.4 показана блок-схема, иллюстрирующая процедуру управления процессом управления парковкой, выполняемым системой 1000 управления парковкой, в соответствии с одним или более вариантами осуществления настоящего изобретения. Инициирующий фактор для запуска процесса управления парковкой конкретно не ограничен, и процесс управления парковкой может быть инициирован путём операции с переключателем запуска устройства 100 управления парковкой.
[0030]
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения имеет функцию перемещения транспортного средства V в качестве цели управления автономным способом на парковочное место на основании операционной команды, полученной извне транспортного средства.
[0031]
На этапе 101 устройство 10 управления устройства 100 управления парковкой получает информацию об окружении транспортного средства с заданной цикличностью. Процесс получения сигналов измерения расстояния и процесс получения захваченных изображений могут выполняться по выбору. Устройство 10 управления по мере необходимости получает сигналы измерения расстояния от устройств 2 измерения расстояния, которые прикреплены во множестве мест транспортного средства V. Устройство 10 управления по мере необходимости получает изображения, снимаемые камерами 1a-1d, прикрепленными во множестве мест транспортного средства V. Хотя это и не ограничено конкретно, камера 1a расположена на передней решетке транспортного средства V, камера 1d расположена вблизи заднего бампера, а камеры 1b и 1c расположены в нижней части зеркал на правой и левой дверях. В качестве каждой из камер 1a-1d может использоваться камера, имеющая широкоугольный объектив с широким углом обзора. Камеры 1a-1d захватывают изображения линий границ парковочных мест вокруг транспортного средства V и объектов, присутствующих вокруг парковочных мест. Камеры 1a-1d могут быть камерами CCD, инфракрасными камерами или другими подходящими устройствами формирования изображений.
[0032]
На этапе 102 устройство 10 управления обнаруживает парковочные места, на которых возможна парковка. Устройство 10 управления обнаруживает рамки (области) парковочных мест на основании изображений, снятых камерами 1a-1d. Устройство 10 управления обнаруживает пустые парковочные места, используя данные обнаружения от устройств 2 измерения расстояния и данные обнаружения, извлеченные из снятых изображений. Устройство 10 управления обнаруживает доступные парковочные места среди парковочных мест. Доступные парковочные места - это парковочные места, которые являются пустыми (т.е. в которых не припаркованы другие транспортные средства) и для которых могут быть вычислены маршруты для завершения парковки. Целевое парковочное место для парковки транспортного средства указывается из числа доступных парковочных мест. В одном или более вариантах осуществления настоящего изобретения условие, что маршрут парковки может быть вычислен, означает, что траектория маршрута от текущего положения до целевого положения парковки может быть воспроизведена по координатам на поверхности дороги без пересечения с объектами (включая припаркованные транспортные средства).
[0033]
На этапе 103 устройство 10 управления передает доступные парковочные места в терминал 5 управления, управляет дисплеем 53 для отображения доступных парковочных мест и запрашивает у оператора M ввод информации о выборе целевого положения парковки для парковки транспортного средства V. Целевое положение парковки может быть автоматически выбрано устройством 10 управления или стороной парковочного объекта. Когда операционная команда указания парковочного места вводится в терминал 5 управления, парковочное место устанавливается в качестве целевого положения парковки.
[0034]
На этапе 104 устройство 10 управления обнаруживает объект с использованием описанной выше схемы. Объекты включают в себя пешеходов, дорожные знаки, дорожные конструкции, грузы, подвижные объекты, конструкции, которые образуют парковочные места, бордюрные камни, которые разделяют парковочные места и т.п. Структуры, которые образуют парковочные места, представляют собой здания, которые составляют гаражи, крытые парковки и тому подобное. Обнаружение объектов включает в себя обнаружение препятствий, которые препятствуют выполнению управления парковкой.
[0035]
На этапе 105 устройство 10 управления вычисляет первый маршрут к целевому парковочному месту. Любая схема, известная на момент подачи настоящей заявки, может использоваться для процесса вычисления первого маршрута к целевому парковочному месту.
[0036]
На этапе 106 устройство 10 управления формирует первую команду управления для движения транспортного средства V1 по вычисленному первому маршруту. Устройство 10 управления исходно сохраняет информацию о характеристиках транспортного средства V1, необходимую для команды управления. Примеры первой команды управления включают в себя операционные команды в отношении величины рулевого управления, скорости рулевого управления, ускорения рулевого управления, положение коробки передач, скорости (включая ноль), ускорения и замедления транспортного средства V1, которые связаны с моментом или положением, когда транспортное средство V1 движется по маршруту парковки и другие операционные команды. Первая команда управления включает в себя время выполнения или положение выполнения вышеупомянутой операционной команды для транспортного средства V1. Команда в отношении маршрута парковки и операционная команда, связанная с маршрутом парковки, выполняются транспортным средством V1, и таким образом транспортное средство V1 может двигаться (парковаться) в целевое положение парковки.
[0037]
На этапе 107 устройство 10 управления принимает ввод команды выполнения первой команды управления от оператора М. Когда вводится команда выполнения, процесс переходит к этапу 108, на котором начинается выполнение первой команды управления. Команда выполнения может быть вводом в переключатель автоблокировки терминала 5 управления. Переключатель автоблокировки представляет собой переключатель, имеющий функцию продолжения выполнения процесса управления парковкой, только когда оператор М прикладывает усилие к переключателю, и функцию приостановки или отмены выполнения процесса управления парковкой, когда сила, приложенная к переключателю, снимается. Пока продолжается нажатие переключателя автоблокировки терминала 5 управления/прикосновение к нему, процесс управления парковкой выполняется непрерывно.
[0038]
Для подтверждения окружения транспортного средства V1 дисплей 53 терминала 5 управления отображает изображение, полученное путем преобразования точки обзора захваченного изображения, представляющего ситуацию вокруг транспортного средства V1, в изображение с высоты птичьего полета, наблюдаемое с точки обзора сверху. Дисплей также может отображать положение оператора М. Пример отображения проиллюстрирован на фиг. 7А. Как показано на чертеже, дисплей 53 отображает кнопку «GO», которая служит в качестве переключателя автоблокировки. Процесс управления парковкой выполняется непрерывно, пока продолжается прикосновение к кнопке «GO» (её нажатие).
[0039]
На этапе 109 после начала выполнения первой команды управления устройство 10 управления обнаруживает изменение в факторе окружения при парковке, которое включает в себя обнаружение объекта. Даже после того, как начато управление парковкой (первое управление) для транспортного средства V1, фактор окружающей среды при парковке, включающий в себя результат обнаружения объекта, изменяется в каждый момент. Объекты включают в себя двумерный объект разметки, например парковочное место. Пешеход (объект) может вновь появиться с течением времени, объект, который не мог быть обнаружен, может быть обнаружен из-за изменения положения транспортного средства V1, или положение и/или размер парковочного места может измениться.
[0040]
Например, бампер и что-либо подобное у припаркованного другого транспортного средства имеет форму с изогнутой поверхностью, поэтому может быть невозможным приём отраженных волн от другого транспортного средства, облучаемого радаром, во время приближения к другому транспортному средству. Таким образом, может оказаться невозможным обнаружение присутствия другого транспортного средства. С другой стороны, после поворота для парковки, взаимное расположение между другим транспортным средством и рассматриваемым транспортным средством изменяется, поэтому приём отраженных волн от другого транспортного средства, облучаемого радаром, и обнаружение присутствия другого транспортного средства может стать возможным. То есть, когда управление транспортным средством V1 осуществляется так, чтобы оно двигалось прямо по маршруту парковки для парковки под прямым углом, а затем поворачивало для парковки и двигалось по маршруту парковки (первому маршруту) для въезда на парковочное место при движении задним ходом, может быть выполнено определение, что «присутствует другое транспортное средство» в положении поворота для парковки или во время движения задним ходом, даже если во время начала управления парковкой или движения прямо вперед было выполнено определение, что «другого транспортного средства нет». В таком случае выполняется определение, что фактор окружения при парковке, включающий в себя результат обнаружения объекта, изменился.
[0041]
Фактор окружения при парковке относится к фактору окружения вокруг транспортного средства, подлежащего парковке (управляемого транспортного средства), который влияет на то, возможно ли выполнение управления парковкой. Факторы окружения, которые влияют на управление парковкой, включают в себя наличие/отсутствие/положение другого транспортного средства в окружении транспортного средства, подлежащего парковке, положение/размер парковочного места и другие подобные факторы. Примеры изменения фактора окружения при парковке включают ситуацию, в которой был недавно обнаружен объект, изменение положения, формы, размера или атрибута объекта, который был обнаружен, и изменение положения, формы, размера, высоты или атрибута парковочного места, которое было обнаружено. Атрибуты парковочного места включают в себя такие формы парковки, как параллельная парковка, парковка под прямым углом и парковка под углом. Атрибуты объекта включают в себя определение того, является ли объект стационарным объектом, является ли объект движущимся объектом, является ли объект пешеходом, является ли объект взрослым, является ли объект ребенком, является ли объект мусором, является ли объект дорожной конструкцией, или является ли объект природным объектом. Дорожные конструкции включают в себя двухмерные или трехмерные дорожные знаки.
[0042]
Хотя это и не ограничено конкретно, изменение фактора окружения при парковке является результатом сравнения между первым окружением при парковке в первый момент времени в качестве эталона и вторым фактором окружения при парковке во второй момент времени после первого момента времени. Первый момент времени может быть моментом времени, в который начинается выполнение первой команды управления (включая момент времени непосредственно перед началом или после него). В качестве альтернативы, первый момент времени может быть моментом времени, в который получен фактор окружения при парковке, используемый для вычисления первого маршрута. В частности, при сравнении между первым фактором окружения при парковке для транспортного средства, обнаруженным до начала выполнения первой команды управления, и вторым фактором окружения при парковке для транспортного средства, обнаруженным после начала выполнения первой команды управления, когда величина изменения между первым значением оценки первого фактора окружения при парковке и вторым значением оценки второго фактора окружения при парковке не меньше заданного значения, устройство 10 управления определяет, что имеется изменение в факторе окружения при парковке. Когда объект, который не был обнаружен, обнаружен после начала выполнения первой команды управления, выполняется определение, что фактор окружения при парковке изменился или что имеется изменение в факторе окружения при парковке.
[0043]
Посредством количественного определения того, имеется ли изменение в факторе окружения при парковке, на основании величины изменения между первым значением оценки первого фактора окружения при парковке и вторым значением оценки второго фактора окружения при парковке, момент времени запроса на выполнение второго управления может быть определен точно и надлежащим образом.
[0044]
Оценка того, что объект был вновь обнаружен, выполняется следующим образом. То, имеется ли изменение в факторе окружения при парковке, может быть определено на основании того, выполняется ли заданное условие. Устройство 10 управления определяет в качестве «нуля» первое оценочное значение, что объект не обнаружен в первый момент времени, определяет в качестве «1» второе оценочное значение, что объект обнаружен во второй момент времени, и использует значение разности между оценочными значениями как величину изменения оценочного значения. Устройство 10 управления определяет заданное условие как величину изменения, равную или превышающую заданное значение «1», и определяет, что фактор окружения при парковке удовлетворяет заданному условию, на основании того, что значение разности между оценочными значениями равно «1».
[0045]
Оценка изменения результата обнаружения, представленного физической величиной, такой как значение координаты или длина, выполняется следующим образом. Для изменения положения, формы или размера объекта, который был обнаружен, устройство 10 управления вычисляет величину изменения оценочного значения на основании обнаруженной физической величины. То же самое относится к изменению положения, формы или размера парковочного места.
[0046]
Оценка определения атрибута на основании результата обнаружения выполняется следующим образом. Атрибут определяется на основании изображений, снятых камерами 1a-1d. На основании величины изменения во времени на снятых изображениях выполняется определение, является ли объект неподвижным объектом или движущимся объектом. Определение выполняется путем сопоставления с образцом для объекта, извлеченного из снятых изображений.
[0047]
Устройство 10 управления может определять, является ли объект пешеходом, является ли объект мусор или является ли объект дорожной конструкцией. Устройство 10 управления может определять, является ли объект взрослым пешеходом или является ли объект пешеходом-ребёнком, на основании сопоставления с образцом и размера объекта, извлеченного из снятых изображений.
[0048]
Устройство 10 управления может определять, является ли обнаруженный пешеход (объект) оператором М, на основании описанного выше положения оператора М. Результат определения того, является ли обнаруженный объект оператором М, пешеходом, отличным от оператора М, или объектом, отличным от человека, используется для создания информации выбора.
[0049]
«Атрибуты» объектов включают в себя то, что объект является «препятствием», которое препятствует движению транспортного средства, и то, что объект является «не препятствием», которое не препятствует движению транспортного средства. Когда объект удовлетворяет заданному условию, устройство 10 управления может определить, что объект является препятствием или не препятствием. Устройство 10 управления может определять заданное условие как условие для определения того, что объект, обнаруженный после начала выполнения первой команды управления, является «не препятствием», которое не препятствует движению транспортного средства. Аналогичным образом, устройство 10 управления может определять, что объект, который не удовлетворяет заданному условию, является препятствием. «Не препятствием» является такой объект, который не препятствует движению транспортного средства V1, как, например, движущийся объект, объект, имеющий высоту 20 см или менее, объект, имеющий высоту 10 см или менее, мусор, ступень с перепадом уровней 20 см или менее, ступень с перепадом уровней 10 см или менее, упавший лист или трава. Результат определения того, является ли обнаруженный объект препятствием или не препятствием, используется для создания информации выбора.
[0050]
«Не препятствие» в одном или более вариантах осуществления настоящего изобретения представляет собой такой объект, который не препятствует движению транспортного средства V1, как, например, движущийся объект, объект, имеющий высоту 20 см или менее, объект, имеющий высоту 10 см или менее, мусор, ступень с перепадом уровней 20 см или менее, ступень с перепадом уровней 10 см или менее, упавший лист или трава, как описано выше. Даже если вновь обнаруживается объект, который не препятствует движению, выполняется определение, что в факторе окружения при парковке нет никаких изменений.
[0051]
Движущийся объект становится отсутствующим на первом маршруте с течением времени и, таким образом, не препятствует движению транспортного средства V1. Объект, имеющий высоту 20 см или менее, объект, имеющий высоту 10 см или менее, ступень с перепадом уровней 20 см или менее, ступень с перепадом уровней 10 см или менее, мусор, опавшие листья, трава и тому подобное также не препятствуют движению транспортного средства V1. Высота и размер объекта могут быть определены на основании снятых изображений и результатов измерений с помощью устройств 2 измерения расстояния. Пакет для покупок из полиэтилена или тому подобного, выдаваемый в супермаркете или тому подобном, имеет верхний предел (например, около 40 см × 40 см) размера и может перемещаться в различных направлениях из-за ветра или тому подобного. Хотя опавшие листья, трава и тому подобное являются природными объектами, их присутствие можно определить на основании признаков на изображении или изменений во времени таких элементов, как цвет, форма скопления и движение в различных направлениях из-за ветра или тому подобного. Для схемы определения атрибута объекта может использоваться известная методика, такая как методика сопоставления с образцом, основанная на степени совпадения признаков изображения.
[0052]
Оценка изменений атрибутов на основании результатов обнаружения выполняется следующим образом. Устройство 10 управления выдает оценочное значение, связанное с атрибутом. Атрибут определяется на основании разности между числовыми значениями, определенными для каждого атрибута, или разности между абсолютными значениями.
[0053]
На этапе 110 устройство 10 управления управляет транспортным средством V1 таким образом, чтобы оно выполнило остановку при приближении к объекту на заданное расстояние. После того, как транспортное средство V1 останавливается, на этапе 111 устройство 10 управления управляет дисплеем 53 терминала 5 управления для отображения информации выбора, и принимает вводимую информацию выбора от оператора М. В процессе представления информации выбора при представлении информации об альтернативном маршруте выполняется вычисление альтернативного маршрута. В качестве дополнения или альтернативы, информация выбора на этапе 111 может отображаться на дисплее 53 терминала 5 управления, если на этапе 109 обнаружен объект.
[0054]
«Информация выбора» в одном или более вариантах осуществления настоящего изобретения включает в себя параметры первого режима и второго режима. В первом режиме выполнение первой команды управления для движения транспортного средства V1 по первому маршруту в целевое парковочное место продолжается. Во втором режиме устройство 10 управления выполняет альтернативную команду управления для движения транспортного средства V1 по альтернативному маршруту, отличному от первого маршрута. Альтернативный маршрут включает в себя дополнительный маршрут к целевому парковочному месту и второй маршрут для покидания транспортным средством V1 целевого парковочного места. Информация выбора включает в себя вариант режима «восстановления» для побуждения устройства 10 управления выполнить вторую команду управления для движения по второму маршруту.
[0055]
Второй маршрут - это маршрут для покидания транспортным средством V1 целевого парковочного места (маршрут для отделения транспортного средства V1 от целевого парковочного мечта) (маршрут для создания расстояния между транспортным средством V1 и целевым парковочным местом) (маршрут для побуждения транспортного средства V1 покинуть целевое парковочное место). Второй маршрут в соответствии с одним или более вариантами осуществления настоящего изобретения используется в режиме восстановления (режиме возврата) для возврата/восстановления из состояния, в котором управление парковкой приостановлено/отменено. Режим восстановления относится к процессу, который выполняется в порядке избежания аварии, когда продолжение процесса управления парковкой затруднено и движение к целевому положению парковки приостановлено/отменено. Режим восстановления представляет собой процесс движения рассматриваемого транспортного средства V1 таким образом, чтобы побудить рассматриваемое транспортное средство V1 покинуть целевое парковочное место (так, чтобы отделить рассматриваемое транспортное средство V1 от целевого парковочного места) (так, чтобы рассматриваемое транспортное средство V1 находилось в отдалении/отдалилось от целевого парковочного места) (так, чтобы рассматриваемое транспортное средство V1 покинуло целевое парковочное место), которое было установлено до выполнения режима восстановления. Устройство 10 управления может вычислять траекторию для уклонения от объекта, который вызывает приостановление/прекращение движения к целевому месту парковки, в качестве второго маршрута (маршрут в режиме восстановления). Как будет понятно, второй маршрут может быть таким же, как и первый маршрут к целевому парковочному месту, и устройство 10 управления может изменять направление движения по маршруту на обратное для вычисления второго маршрута для движения транспортного средства V1 в направлении, противоположном первому маршруту. Второй маршрут, вычисленный в режиме восстановления, может представлять собой траекторию движения (возвращения) в положение, в котором был начат процесс парковки.
[0056]
Когда объект обнаружен после начала выполнения первой команды управления, в качестве информации для оператора M представляется не только первый маршрут к целевому парковочному месту, но также и второй маршрут для покидания транспортным средством V1 целевого парковочного места, и таким образом число вариантов для оператора M может быть увеличено.
[0057]
В одном или более вариантах осуществления настоящего изобретения операционную информацию получают от оператора M, расположенного вне транспортного средства V1. Оператор M, находящийся вне транспортного средства V1, может определять окружение вокруг транспортного средства V1 с точки обзора, отличной от камер 1 и устройств 2 измерения расстояния транспортного средства V1. Посредством представления информации выбора оператору M, расположенному вне транспортного средства V1 может быть реализовано надлежащее содержимое управления.
[0058]
В одном или более вариантах осуществления настоящего изобретения устройство 10 управления вычисляет уровень рекомендации и изменяет форму отображения «информации выбора» в соответствии с уровнем рекомендации.
В частности, при представлении информации выбора оператору M устройство 10 управления вычисляет первый уровень рекомендации для первого режима и второй уровень рекомендации для второго режима в соответствии с атрибутом обнаруженного объекта. Когда первый уровень рекомендации имеет более высокое значение, чем второй уровень рекомендации, устройство 10 управления отображает с выделением первый переключатель для приема выбора первого режима, чтобы он был более заметным, чем второй переключатель для приема выбора второго режима. С другой стороны, когда второй уровень рекомендации имеет более высокое значение, чем первый уровень рекомендации, устройство 10 управления отображает с выделением второй переключатель для приема выбора второго режима, чтобы он был более заметным, чем первый переключатель для приёма выбора первого режима.
[0059]
При выделении любого из первого переключателя и второго переключателя размер отображения, цвет, яркость, прозрачность, толщина и форма линий границ (пунктирные линии, цепочки двухточечных линий) и/или наличие или отсутствие мигания первого переключателя и второго переключателя выполнены разными. При выделении отображения первого переключателя в большей степени, чем отображения второго переключателя, область отображения (область) первого переключателя может быть сделана относительно большей по сравнению с областью второго переключателя, область отображения первого переключателя и/или его линия обрамления может быть обозначена выделяющимся цветом, таким как красный, сплошная линия, оранжевый или желтый, чтобы он был относительно заметным по сравнению со вторым переключателем, линия обрамления области отображения первого переключателя может быть обозначена жирным шрифтом или двойной линией, чтобы он был относительно заметным по сравнению со вторым переключателем, или область отображения первого переключателя может отображаться с высокой яркостью или миганием, чтобы он был относительно заметным по сравнению со вторым переключателем.
[0060]
В этом случае область отображения (область) второго переключателя может быть сделана относительно меньшей по сравнению с областью первого переключателя, область отображения второго переключателя и/или его линии обрамления может быть обозначена не выделяющимся цветом, таким как синий, зеленый или фиолетовый, чтобы он был относительно незаметным по сравнению с первым переключателем, линия обрамления области отображения второго переключателя может быть обозначена тонкой или пунктирной линией, чтобы он был относительно незаметным по сравнению с первым переключателем, или область отображения второго переключателя может отображаться с низкой яркостью или серым цветом, чтобы он был относительно незаметным. В отличие от этого, когда отображение второго переключателя выделяется в большей степени, чем отображение первого переключателя, описанная выше схема используется для того, чтобы сделать отображение второго переключателя относительно заметным и/или сделать отображение первого переключателя относительно незаметным.
[0061]
Таким образом, посредством вычисления уровней рекомендации первого режима и второго режима в соответствии с атрибутом обнаруженного объекта, и отображения переключателя, который используется для выбора режима с более высоким уровнем рекомендации, таким образом, чтобы он был относительно заметным, может обеспечиваться помощь оператору М в операции выбора для выбора режима, подходящего для присутствия обнаруженного объекта.
[0062]
В процессе вычисления уровня рекомендации в соответствии с одним или более вариантами осуществления настоящего изобретения устройство 10 управления вычисляет значение второго уровня рекомендации как более высокое значение по мере увеличения расстояния между оператором M и транспортным средством V1. Когда оператор М отходит от транспортного средства V1, надежность определения, выполненного оператором М в отношении окружения вокруг транспортного средства V1, может снизиться. В одном или более вариантах осуществления настоящего изобретения значение второго уровня рекомендации вычисляется как высокое значение, так что, когда обнаружен объект, второй режим для выполнения команды альтернативного управления для движения транспортного средства по альтернативному маршруту с большей легкостью выбирается по сравнению с продолжением первого управления. Когда вычислено, что второй уровень рекомендации является высоким, второй переключатель для выбора второго режима отображается таким образом, чтобы он был относительно заметным.
[0063]
«Информация выбора» в одном или более вариантах осуществления настоящего изобретения может включать в себя информацию об альтернативном маршруте. Информация об альтернативном маршруте включает в себя положение и траекторию альтернативного маршрута и точку поворота для парковки на альтернативном маршруте. Путём отображения такой информации на дисплее 53 терминала 5 управления можно помочь оператору М выполнить определение в отношении выбора.
[0064]
«Информация выбора» в одном или более вариантах осуществления настоящего изобретения может включать в себя количество поворотов для парковки на альтернативном маршруте. Путём отображения количества поворотов для парковки на альтернативном маршруте на дисплее 53 терминала 5 управления можно помочь оператору М выполнить определение в отношении выбора.
[0065]
«Информация выбора» в одном или более вариантах осуществления настоящего изобретения может включать в себя положение остановки движения на альтернативном маршруте. Положение остановки движения является местом, которого транспортное средство может достичь по альтернативному маршруту. Когда целевое парковочное место не может быть достигнуто по альтернативному маршруту, положение остановки движения может быть представлено в качестве информации выбора, чтобы информировать оператора M о точке, которую может достичь транспортное средство. Путём отображения положения остановки движения на альтернативном маршруте на дисплее 53 терминала 5 управления можно помочь оператору М выполнить определение по выбору выбора. Положение остановки движения может совпадать с местом эвакуации.
[0066]
На этапе 112 устройство 10 управления принимает ввод информации выбора, который вводится оператором М в отношении представленной информации выбора. Когда оператор M вводит команду продолжения выполнения в отношении первой команды управления, процесс возвращается к этапу 107, с которого продолжаются процессы этапа 108 и последующих этапов.
[0067]
Фиг. 5 иллюстрирует подпроцедуру этапа 111 по фиг. 4. На этапе 201 устройство 10 управления отображает переключатель для выбора продолжения первой команды управления или переключения на альтернативное управление в качестве информации выбора. На этапе 202 альтернативный маршрут дополнительно отображается в качестве информации выбора. В это время на этапе 203 положение остановки на альтернативном маршруте может быть представлено в качестве информации выбора. На этапе 204 одно или более положений поворотов для парковки на альтернативном маршруте и количество поворотов для парковки могут отображаться в качестве информации выбора. На этапе 205 указание в отношении того, является ли альтернативный маршрут или второй маршрут маршрутом к целевому парковочному месту, может быть включено в качестве информации выбора. Первый маршрут представляет собой оптимальный маршрут к целевому парковочному месту. Альтернативный маршрут включает в себя маршрут, который проходит через точку, отличную от первого маршрута, к целевому месту парковки, и маршрут для движения в место эвакуации, отличное от целевого парковочного места. Из-за присутствия нового объекта или изменения результата обнаружения маршрут для движения к целевому парковочному месту может быть не определен, или число поворотов для парковки может превысить допустимое число. В этом случае второй маршрут вычисляется для временной эвакуации транспортного средства V1, а не для направления в целевое место парковки. Транспортное средство движется по второму маршруту, таким образом покидая целевое место парковки, и после этого может быть предпринята попытка повторного движения в целевое место парковки (парковка в целевом месте парковки).
[0068]
Фиг. 6 иллюстрирует подпроцедуру этапов 111 - 117 по фиг. 4. После обнаружения объекта на этапе 109 по фиг. 4 и управления транспортным средством для выполнения остановки на этапе 110 выполняется процесс представления информации выбора.
На этапе 301 по фиг. 6 устройство 10 управления определяет атрибут объекта. В качестве схемы определения атрибута объекта используется описанная выше схема. Результат определения атрибута используется для вычисления уровня рекомендации.
[0069]
Если объект может быть удален из первого маршрута, устройство 10 управления определяет, что продолжение первого управления является рекомендуемым управлением.
На этапе 302 первый уровень рекомендаций для первого управления и второй уровень рекомендаций для альтернативного управления вычисляются в соответствии с атрибутом. Выполняется прибавление/вычитание эталонного значения, которое является заранее установленным. Пример прибавления/вычитания для уровня рекомендации будет описан ниже. При корректировке уровня рекомендации до более высокого значения в предположении, что эталонное значение установлено в 1, может быть прибавлено положительное числовое значение или может быть выполнено умножение на коэффициент Q (Q>1). При корректировке уровня рекомендации до более низкого значения, в предположении, что эталонное значение установлено в 1, может быть вычтено положительное числовое значение или может быть выполнено умножение на коэффициент Q (0<Q<1).
[0070]
Примеры вычисления уровня рекомендации будут описаны ниже.
(1) Если обнаруженным объектом является оператор М, предпочтительно продолжать первое управление, а не приостанавливать/отменять первое управление, поскольку оператор М обращает внимание на движение транспортного средства V1. Поэтому первый уровень рекомендации первого элемента управления вычисляется как значение, превышающее контрольное значение. Хотя это конкретно не ограничено, когда положение обнаруженного объекта совпадает с положением оператора М (или терминала 5 управления), выполняется определение, что обнаруженный объект является оператором М.
(2) Если обнаруженный объект является пешеходом, предпочтительно остановить первое управление и выполнить альтернативное управление для движения по альтернативному маршруту, а не продолжать первое управление, как описано выше в (1), поскольку пешеход может ходить в окружении маршрута. Поэтому уровень второй рекомендации второго управления установлен в относительно более высокое значение, чем в приведенном выше случае (1). Коэффициент Q при получении второго уровня рекомендации устанавливается в более высокое значение, чем коэффициент Q в приведенном выше случае (1), или коэффициент Q при получении первого уровня рекомендации устанавливается в более низкое значение, чем коэффициент Q в приведенном выше случае (1). Хотя это конкретно не ограничено, когда характерное движение части тела (конечности) может быть извлечено из снятых с течением времени изображений обнаруженного объекта, выполняется определение, что объект является пешеходом.
(3) Если обнаруженный объект является препятствием, предпочтительно наделить важностью определение, выполненное оператором М, а не рекомендовать какой-либо из первого режима и второго режима. Поэтому первый уровень рекомендации для первого управления и второй уровень рекомендации для второго управления устанавливаются в одно и то же значение. Хотя это и не ограничено конкретно, выполняется определение в отношении того, является ли объект неподвижным объектом или движущимся объектом, на основании изменения положения со временем на снятых изображениях обнаруженного объекта. Схема определения атрибута объекта конкретно не ограничена, и определение может быть выполнено с использованием схемы, известной на момент подачи настоящей заявки.
[0071]
На этапе 303 устройство 10 управления управляет дисплеем 53 терминала 5 управления для отображения информации выбора в соответствии со значениями первого уровня рекомендации и второго уровня рекомендации.
Во время начала управления парковкой оператор М касается переключателя «GO», показанного на фиг. 7А, или нажимает на него, , чтобы таким образом дать команду к началу управления парковкой. Если затем обнаружен объект, устройство 10 управления замедляет или останавливает транспортное средство, чтобы приостановить или отменить выполнение первой команды управления. Если первый уровень рекомендации имеет более высокое значение, чем второй уровень рекомендации на этапе 302, как показано на фиг. 7B, на этапе 303 более крупно отображается «Продолжить (продолжение)», что является первым переключателем для ввода команды продолжения в отношении первой команды управления, , таким образом, чтобы оно было относительно более заметным, чем «Переключить (переключение)», что является вторым переключателем. В ситуации, показанной на фиг. 7B, оператор M находится в положении, отделенном от первого маршрута RT1, и другие препятствия отсутствуют, поэтому первый уровень рекомендации имеет более высокое значение, чем второй уровень рекомендации. С другой стороны, если второй уровень рекомендации имеет более высокое значение, чем первый уровень рекомендации, как показано на фиг. 7C, на этапе 303 «Переключить (переключение)», что является вторым переключателем для ввода команды переключения на альтернативное управление, отображается более крупным, чтобы быть относительно более заметным, чем «Продолжить (продолжение)», что является первым переключателем. В ситуации, показанной на фиг. 7C, рядом с первым маршрутом RT1 присутствует другое транспортное средство, и второй уровень рекомендации имеет более высокое значение, чем первый уровень рекомендации.
[0072]
На этапе 304 устройство 10 управления ожидает ввода вводимой информации выбора. Устройство 10 управления подтверждает ввод команды продолжения первого управления. Вводимая информация команды продолжения первого управления может быть введена прикосновением к первому переключателю, который принимает выбор первого режима. В качестве дополнения или альтернативы, в случае, если первый уровень рекомендации выше второго уровня рекомендации, определение, что введена вводимая команда выбора для первого уровня рекомендации, может быть выполнено, если выполняется некоторая операция принятия/действие принятия. Операция принятия/действие принятия может быть действием в отношении основного переключателя, такого как кнопка запуска, встряхиванием терминала 5 управления вправо и влево или вверх и вниз, ударом по терминалу 5 управления или постукиванием или скользящим прикосновением в отношении дисплея 53. Например, если устройство 10 управления определяет, что уровень рекомендации первого режима является относительно более высоким, и оператор М выполняет операцию взмаха вниз терминалом 5 управления, выполняется определение, что оператор М выбирает первый режим.
[0073]
Не только операция активного выбора, как описано выше, но также и операция неактивного выбора может быть заранее определена. При такой операции неактивного выбора, когда устройство 10 управления определяет режим, имеющий более высокий уровень рекомендации между первым управлением и альтернативным управлением, и отсутствует ввод в терминал 5 управления в течение заданного времени, устройство 10 управления выбирает режим, имеющий более высокий уровень рекомендации. Например, если оператор M не выполняет никаких операций в течение заданного времени после того, как устройство 10 управления определило, что уровень рекомендации первого режима является относительно высоким, устройство 10 управления определяет, что оператор M выбирает первый режим.
[0074]
На этапе 305, если на этапе 304 введена команда продолжения первого управления, устройство 10 управления определяет, является ли обнаруженный объект «не препятствием» (объектом, который не препятствует движению транспортного средства). В одном или более вариантах осуществления настоящего изобретения это ситуация, в которой, если после начала управления парковкой обнаружен объект, оператор M вводит команду продолжения первого управления и продолжает первое управление для перемещения транспортного средства V1 вдоль первого маршрута, при этом проверяя объект. Если объект является препятствием, весьма вероятно, что будет выбрано альтернативное управление для движения по альтернативному маршруту. Если объект не является препятствием, весьма вероятно, что оператор М продолжит первое управление. Соответственно, помимо процесса определения атрибута объекта на этапе 302, процесс определения атрибута объекта выполняется на этапе 305. Устройство 10 управления сначала оценивает объект, такой как пешеход или оператор М, который покидает маршрут посредством самостоятельной ходьбы, а затем определяет, является ли обнаруженный объект «не препятствием», не препятствующим движению транспортного средства V1. Если объект является подвижным объектом (когда объект может быть удален/унесен), этот объект является «не препятствием».
[0075]
Устройство 10 управления определяет атрибут объекта. Когда объект имеет какой-либо из следующих атрибутов, выполняется определение, что объект является подвижным объектом, который может покинуть первый маршрут. Если обнаруженный объект является подвижным объектом, выполняется определение, что этот объект является «не препятствием».
(1) Случай, в котором обнаруженный объект является оператором М
(2) Случай, в котором обнаруженный объект является движущимся объектом
(3) Случай, в котором обнаруженный объект является пешеходом
[0076]
За определением на этапе 305 того, что объект является «не препятствием», следует этап 306. На этапе 306 устройство 10 управления вычисляет первый уровень рекомендации как относительно высокое значение и определяет уровень рекомендации для первого режима, в котором продолжается первое управление. После этого процесс переходит к этапу 307, на котором отображается с выделением первый переключатель для выбора первого режима. За определением на этапе 305, что объект является препятствием, следует этап 308. На этапе 308 устройство 10 управления вычисляет первый уровень рекомендации как относительно низкое значение или вычисляет второй уровень рекомендации как относительно высокое значение, отменяет первое управление и определяет уровень рекомендации для второго режима для движения по альтернативному маршруту. После этого процесс переходит к этапу 309, на котором отображается с выделением второй переключатель для выбора второго режима.
[0077]
Как показано на фиг. 8A, «информация выбора» в одном или более вариантах осуществления настоящего изобретения может включать в себя альтернативный маршрут RT1’; в дополнение к первому маршруту RT1. Положение и траектория альтернативного маршрута RT1’ могут отображаться на дисплее 53 терминала 5 управления. Кроме того, как проиллюстрировано на фиг. 8B, может отображаться уведомление в отношении маршрута. В примере, проиллюстрированном на фиг. 8B, чтобы сообщить, что первый маршрут включает в себя узкий маршрут, отображается следующий текст: «Транспортное средство может двигаться по узкому маршруту для продолжения управления парковкой. Управление парковкой будет продолжено, если Ваше визуальное подтверждение позволяет управлять с остановкой».
[0078]
Как показано на фиг. 9А, «информация выбора» в одном или более вариантах осуществления настоящего изобретения может включать в себя количество поворотов для парковки на альтернативном маршруте RT′. Количество поворотов для парковки на альтернативном маршруте может отображаться на дисплее 53 терминала 5 управления. В примере, показанном на фиг. 9А, рекомендуется переключиться на альтернативный маршрут RT′, на котором число поворотов для парковки равно двум, и второй переключатель «Переключить» подчёркнуто отображается, чтобы быть более заметным, чем первый переключатель «Продолж.». Кроме того, как показано на фиг. 9B, может отображаться уведомление об альтернативном маршруте. В примере, показанном на фиг. 9B, для указания количества поворотов для парковки на альтернативном маршруте отображается следующий текст: «Выбор режима переключения допускает парковку с увеличенным числом поворотов, составляющим два».
[0079]
Как показано на фиг. 10A, «информация выбора» в одном или более вариантах осуществления настоящего изобретения может включать в себя положение остановки движения на альтернативном маршруте. Положение остановки движения относится к положению, в которое может в конечном итоге двигаться транспортное средство, когда не удается достичь целевого парковочного места. Конечная часть альтернативного маршрута RT′ является положением остановки движения. Эта информация выбора позволяет оператору M понять, что альтернативный маршрут RT’ является маршрутом, по которому невозможно достичь целевого места парковки. В примере, показанном на фиг. 10B для пояснения альтернативного маршрута RT’, отображается следующий текст: «Выбор режима переключения пытается выполнить парковку вдоль маршрута, включающего в себя поворот для парковки. Целевое парковочное место не может быть достигнуто». Посредством отображения положения остановки движения, которое является местом, которое может быть достигнуто по альтернативному маршруту RT’, на дисплее 53 терминала 5 управления можно помочь оператору М выполнить определение в отношении выбора.
[0080]
Как показано на фиг. 11А, «информация выбора» в одном или более вариантах осуществления настоящего изобретения может включать в себя вариант режима восстановления. Третий переключатель «Восстановление» отображается для выбора режима восстановления для перемещения транспортного средства V1 в место покидания вместо продолжения первой команды управления или переключения на альтернативное управление. Фиг. 11B иллюстрирует пример, в котором второе управление (режим восстановления) связано с описанным выше вторым переключателем. Фиг. 11А иллюстрирует пример информации выбора, в которой предусмотрен специальный переключатель (Восстановление) для выбора второго управления (режима восстановления) для покидания транспортным средством V1 целевого места парковки, тогда как фиг. 11B иллюстрирует пример информации выбора, которая включает в себя первый переключатель для первого режима для движения транспортного средства в целевое парковочное место и второй переключатель для второго режима, включающий в себя управление для движения транспортного средства в целевое парковочное место по альтернативному маршруту, и управление движением транспортного средства в место эвакуации по альтернативному маршруту.
[0081]
На этапе 310 для информации выбора, в которой рекомендуемый режим на этапе 306 или 308 отображается с выделением, устройство 10 управления подтверждает выбор или принятие, сделанные оператором М. Вводимая информация выбора определяется в соответствии с операцией в отношении первого переключателя или второго переключателя. Вводимая информация о принятии может быть получена посредством активной операции ввода, такой как прикосновение к переключателю, отображаемому на дисплее 53, или встряхивание терминала 5 управления, или также может быть получена посредством ввода с неактивным принятием, когда ничего не вводится в течение заданного времени для представления информация выбора, в которой рекомендуемый режим отображается с выделением.
[0082]
За этапом 310 следует этап 311, на котором устройство 10 управления подтверждает, что объект переместился с маршрута. После подтверждения отсутствия объекта процесс переходит к этапу 312. На этапе 312 устройство 10 управления продолжает выполнять команду управления в выбранном режиме.
[0083]
Когда устройство 10 управления подтверждает, что объект присутствует и не переместился с маршрута, процесс переходит к этапу 313. На этапе 313 устройство 10 управления определяет, может ли быть вычислен альтернативный маршрут к целевому парковочному месту с поворотом для парковки. Маршрут может быть вычислен с использованием схемы, известной на момент подачи настоящей заявки. Если маршрут к целевому парковочному месту вычислен с заданным или меньшим числом поворотов для парковки, процесс переходит к этапу 314, на котором транспортное средство движется в целевое парковочное место по альтернативному маршруту.
[0084]
На этапе 313, когда маршрут к целевому парковочному месту не может быть вычислен с заданным или меньшим числом поворотов для парковки, устройство 10 управления вычисляет альтернативный маршрут, то есть второй маршрут для покидания целевого парковочного места. Второй маршрут является маршрутом к месту эвакуации в положении, отличном от целевого парковочного места. Устройство 10 управления управляет транспортным средством V1 для движения по второму маршруту (альтернативному маршруту).
[0085]
Таким образом, для объекта, который был вновь обнаружен после начала движения к целевому парковочному месту, информация о выборе представляется оператору М на основании уровня рекомендации в соответствии с атрибутом объекта, и поэтому возможно выполнить содержимое управления в соответствии с намерением оператора M при одновременном снижении нагрузки на оператора M по выполнению определения. При дистанционной парковке важна связь между транспортным средством V1 и оператором M посредством обмена информацией между устройством 10 управления и терминалом 5 управления, такого как обмен информацией между определением на стороне транспортного средства и оператором М и подтверждением определения. Если все определения оставлены на усмотрение оператора M, а содержимое управления для транспортного средства V1 определяется только на основании намерения оператора M, увеличивается нагрузка на оператора M по выполнению определения, а поле обзора и способность визуального распознавания у оператора М ограничены. На основании уровня рекомендации устройство 10 управления транспортным средством V представляет оператору М информацию выбора, которая помогает оператору М выполнить определение с учётом намерения оператора М, и поэтому возможно определить и выполнить соответствующее содержимое управления, в котором отражены определение на стороне транспортного средства и намерение оператора М.
[0086]
Обращаясь вновь к фиг. 4, после того, как устройство 10 управления выполняет процесс этапа 111, если команда продолжения выполнения для первой команды управления не вводится на этапе 112 для представленной информации выбора, то есть если запрашивается выполнение команды альтернативного управления, процесс переходит к этапу 113. С другой стороны, если вводится команда продолжения выполнения для первой команды управления, процесс возвращается к этапу 107.
[0087]
На этапе 113, если устройство 10 управления приостанавливает/отменяет выполнение первой команды управления, которая выполняется в данный момент, процесс переходит к этапу 114.
[0088]
На этапе 114 устройство 10 управления вычисляет альтернативный маршрут. В это время может быть принято во внимание изменение ситуации для повторного вычисления альтернативного маршрута, или также может использоваться альтернативный маршрут, вычисленный при представлении информации выбора.
[0089]
Этап 115 представляет собой процесс, который может выполняться параллельно этапу 114 или перед ним, или после этапа 114. На этапе 115 устройство 10 управления может при необходимости установить место эвакуации и вычислить альтернативный маршрут в место эвакуации. Также, когда управление транспортным средством V1 осуществляется так, чтобы оно двигалось по второму маршруту для покидания целевого парковочного места, может быть установлено место эвакуации и может быть вычислен второй маршрут к месту эвакуации.
[0090]
За этапом 115 следует этап 116, на котором устройство 10 управления формирует альтернативную команду управления для движения транспортного средства V1 по вычисленному альтернативному маршруту. Альтернативная команда управления включает в себя второй маршрут к месту эвакуации. Устройство 10 управления заранее хранит информацию о характеристиках транспортного средства V1, необходимую для вычисления альтернативной команды управления. Примеры альтернативной команды управления включают в себя операционную команду для величины рулевого управления, скорости рулевого управления, ускорения рулевого управления, положения коробки передач, скорости (включая ноль), ускорения и замедления транспортного средства V1, которые связаны с моментом или положением, когда транспортное средство V1 движется по маршруту парковки, и другие операционные команды.
На этапе 117 устройство 10 управления выполняет альтернативную команду управления. Альтернативная команда управления включает в себя время выполнения или положение выполнения вышеуказанной операционной команды для транспортного средства V1. Команда в отношении маршрута парковки и операционная команда, связанная с маршрутом парковки, выполняются транспортным средством V1, и транспортное средство V1, таким образом, может перемещаться (парковаться) в целевое положение парковки. Когда вводится команда выполнения для альтернативного управления, устройство 10 управления выполняет процесс движения транспортного средства V1 по альтернативному маршруту для покидания целевого парковочного места.
[0091]
Альтернативное управление для движения транспортного средства V1 по альтернативному маршруту включает в себя второе управление для покидания транспортным средством целевого парковочного места. Устройство 10 управления выполняет второе управление на основании второй команды управления. Когда команда выполнения для второго управления вводится оператором М, устройство 10 управления в соответствии с одним или более вариантами осуществления настоящего изобретения приостанавливает или отменяет выполнение первой команды управления, вычисляет второй маршрут для покидания транспортным средством V1 целевого парковочного места, формирует или получает вторую команду управления для движения транспортного средства по второму маршруту и выполняет вторую команду управления. Таким образом, когда фактор окружения при парковке изменяется, например, когда вновь обнаружен объект, вторая команда управления (режим восстановления) может быть быстро выполнена в соответствии с намерением оператора М. После того, как второе управление завершено, осуществляется управление транспортным средством V1 для движения в место эвакуации. Место эвакуации не является парковочным местом, и поэтому необходимо переместить транспортное средство V1 на парковочное место.
[0092]
На этапе 118, когда вновь вводится команда выполнения для первой команды управления для движения транспортного средства в целевое парковочное место, выполняются процессы этапа 119 и последующих этапов для повторного движения транспортного средства в целевое парковочное место. Это связано с тем, что транспортное средство V1 может не иметь возможности двигаться к целевому парковочному месту даже после выполнения альтернативной команды управления. Когда транспортное средство V1 может двигаться к целевому парковочному месту посредством выполнения альтернативной команды управления, команда выполнения для первой команды управления не вводится, поэтому процесс управления парковкой завершается.
[0093]
На этапе 119 устройство 10 управления обнаруживает объекты вокруг транспортного средства V1. Это делается потому, что может вновь приблизиться объект. На этапе 120 устройство 10 управления снова устанавливает целевое парковочное место. Может быть установлено то же парковочное место, что и целевое парковочное место, установленное на этапе 103. На этапе 121 устройство 10 управления вычисляет маршрут парковки (первый маршрут) к целевому парковочному месту. Маршрут парковки включает в себя положение поворота для парковки, необходимого для движения на парковочное место. Для этой операции маршрут парковки определяется как линия, а также определяется как область в форме полосы, соответствующая области, занимаемой транспортным средством V1, на основании ширины транспортного средства. Область, занимаемая транспортным средством V1, определяется с учетом ширины транспортного средства и ширины запаса, предусмотренного для движения. Устройство 10 управления подтверждает, что в пределах занимаемой области не обнаружены объекты.
[0094]
На этапе 121 устройство 10 управления формирует команду управления для движения транспортного средства V1 по вычисленному маршруту парковки. Устройство 10 управления заранее сохраняет информацию о характеристиках транспортного средства V1, необходимую для команды управления. Примеры команды управления включают в себя операционные команды для величины рулевого управления, скорости рулевого управления, ускорения рулевого управления, положения коробки передач, скорости (включая ноль), ускорения и замедления транспортного средства V1, которые связаны с моментом или положением, когда транспортное средство V1 движется по маршруту парковки, и другие операционные команды. Команда управления включает в себя время выполнения или положение выполнения вышеуказанной операционной команды для транспортного средства V1. Команда в отношении маршрута парковки и операционная команда, связанная с маршрутом парковки, выполняются транспортным средством V1, и таким образом транспортное средство V1 может перемещаться (парковаться) в целевое положение парковки. Команда управления в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя команды остановки для транспортного средства V1 во втором положении. В качестве дополнения или альтернативы, команда управления может включать в себя операцию открытия двери транспортного средства V1 во втором положении.
[0095]
На этапе 122 устройство 10 управления отслеживает изменение окружения вокруг транспортного средства V1, например появление объекта, до тех пор, пока транспортное средство V1 не достигнет положения поворота для парковки. Когда транспортное средство V1 достигает положения поворота для парковки, на этапе 123 выполняется переключение передач, включенное в команду управления. За этапом 123 следует этап 124, на котором управление парковкой завершается путем последовательного выполнения команд управления.
[0096]
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения управляет работой системы 40 привода через контроллер 70 транспортного средства в соответствии с командой управления таким образом, что транспортное средство V1 движется по маршруту парковки (примеры маршрута парковки включают в себя первый маршрут, альтернативный маршрут и второй маршрут). Устройство 100 управления парковкой вычисляет командные сигналы для системы 40 привода транспортного средства V1, такой как мотор EPS, при этом возвращая выходное значение датчика 50 угла рулевого управления таким образом, что траектория движения транспортного средства V1 совпадает с вычисленным маршрутом парковки, и передает командные сигналы в систему 40 привода или в контроллер 70 транспортного средства, который управляет системой 40 привода.
[0097]
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя блок управления для управления парковкой. Блок управления парковочным управлением получает информацию о диапазоне переключения передач от блока управления AT/CVT, информацию о скорости вращения колес от блока управления ABS, информацию об угле поворота рулевого управления от блока управления углом поворота рулевого управления, информацию о скорости вращения двигателя от ECM, и другую необходимую информацию. На основании этих элементов информации блок управления для управления парковкой вычисляет и выводит информацию команд в отношении автономного рулевого управления в блок управления EPS, информацию команд, такую как предупреждение блоку управления счетчиком, и т.п. Устройство 10 управления получает элементы информации, которые получены датчиком 50 угла рулевого управления транспортного средства V1, датчиком 60 скорости транспортного средства и другими датчиками транспортного средства V1, через контроллер 70 транспортного средства.
[0098]
Система 40 привода в соответствии с одним или более вариантами осуществления настоящего изобретения приводит в движение транспортное средство V1 для движения (перемещения) из текущего положения в целевое положение парковки путем управления на основании сигналов команды управления, полученных от устройства 100 управления парковкой. Устройство рулевого управления в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой приводной механизм, который перемещает транспортное средство V1 в правом и левом направлениях. Мотор EPS, включенный в систему 40 привода, приводит в действие механизм рулевого управления с усилителем рулевого управления устройства рулевого управления на основании сигналов команды управления, полученных от устройства 100 управления парковкой, для управления величиной рулевого управления и управления работой при движении транспортного средства V1 в целевое положение парковки. Содержимое управления и схема работы для парковки транспортного средства V1 не ограничены конкретным образом, и может быть надлежащим образом применена любая схема, известная на момент подачи настоящей заявки.
[0099]
Когда устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения управляет транспортным средством V1 для движения в целевое положение парковки по маршруту, вычисленному на основании положения транспортного средства V1 и положения целевого положения парковки, управление акселератором и тормозом осуществляется автономно на основании установленной скорости управления транспортным средством (заданной скорости транспортного средства), а работа рулевого устройства автономно управляет движением транспортного средства V1 в соответствии со скоростью транспортного средства.
[0100]
В одном или более вариантах осуществления настоящего изобретения внимание сосредоточено на процессах после обнаружения объекта, поэтому был описан пример процесса, в котором управление парковкой на этапе 108 приостанавливается/отменяется, но если объекты не обнаружены, процесс управления парковкой выполняется на этапе 108 в соответствии с вышеописанным принципом.
[0101]
Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения используется в устройстве управления парковкой, как указано выше, и таким образом демонстрирует следующие эффекты. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения выполнено и работает, как указано выше и, следовательно, демонстрирует следующие эффекты.
[0102]
(1) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, когда обнаружен объект, исполняемая команда управления продолжается или исполняется альтернативная команда управления для движения транспортного средства по альтернативному маршруту на основании выбора, вводимого оператором М, и поэтому процесс парковки может быть выполнен в соответствии с намерением оператора М без остановки транспортного средства во всех случаях.
Для объекта, который был вновь обнаружен после начала движения к целевому парковочному месту, информация о выборе представляется оператору M в соответствии с атрибутом объекта, и поэтому возможно выполнить содержимое управления согласно намерению оператора М, при этом снижая нагрузку на оператора М по выполнению определения. В особенности при дистанционной парковке важна связь, такая как обмен информацией между определением на стороне транспортного средства и оператором М и подтверждение определения. Если все определения оставлены на усмотрение оператора M, и содержимое управления для транспортного средства V1 определяется только на основании намерения оператора M, нагрузка на оператора M по выполнению определения увеличивается. Кроме того, поле обзора и способность распознавания зрения у оператора M ограничены, и определение, выполненное оператором M, может быть неточным. Напротив, бортовые камеры могут с легкостью обнаружить присутствие объекта. На основании уровня рекомендации в соответствии с атрибутом объекта устройство 10 управления транспортным средством V1 выдаёт оператору M информацию выбора, которая может помочь оператору M выполнить определение, и, следовательно, можно определить соответствующее содержимое управления, в котором отражены определение на стороне транспортного средства и намерение оператора М.
[0103]
(2) В способе управления парковкой согласно одному или более вариантам осуществления настоящего изобретения при представлении информации выбора оператору M устройство 10 управления вычисляет первый уровень рекомендации для первого режима и второй уровень рекомендации для второго режима в соответствии с атрибутом обнаруженного объекта. Когда первый уровень рекомендации имеет более высокое значение, чем второй уровень рекомендации, устройство 10 управления отображает с выделением первый переключатель для приема выбора первого режима , чтобы он был более заметным, чем второй переключатель для приема выбора второго режима. С другой стороны, когда второй уровень рекомендации имеет более высокое значение, чем первый уровень рекомендации, устройство 10 управления отображает с выделением второй переключатель для приема выбора второго режима, чтобы он был более заметным, чем первый переключатель для получения выбора первого режима. Путем вычисления уровней рекомендации первого режима и второго режима в соответствии с атрибутом обнаруженного объекта и отображения переключателя, который используется для выбора режима с более высоким уровнем рекомендации таким образом, чтобы он был относительно более заметным, можно помочь операции выбора со стороны оператора М для выбора режима, подходящего при присутствии обнаруженного объекта.
[0104]
(3) В способе управления парковкой согласно одному или более вариантам осуществления настоящего изобретения устройство 10 управления вычисляет значение второго уровня рекомендации как более высокое значение по мере увеличения расстояния между оператором М и транспортным средством V1. Когда оператор М отходит от транспортного средства V1, может снизиться надежность определения, выполненного оператором М в отношении окружения вокруг транспортного средства V1. В одном или более вариантах осуществления настоящего изобретения значение второго уровня рекомендации вычисляется как высокое значение, так что, если обнаружен объект, второй режим для выполнения команды альтернативного управления для движения транспортного средства по альтернативному маршруту может быть с большей легкостью выбран, чем продолжение первого управления. Когда второй уровень рекомендации вычислен как высокий, второй переключатель для выбора второго режима отображается таким образом, чтобы он был относительно более заметным.
[0105]
(4) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, если после начала выполнения первой команды управления обнаружен объект, не только первый маршрут к целевому парковочному месту, но также и второй маршрут для покидания транспортным средством V1 целевого парковочного места представляется в качестве информации для оператора M, и поэтому варианты для оператора M могут быть увеличены.
[0106]
(5) В способе управления парковкой согласно одному или более вариантам осуществления настоящего изобретения «информация выбора» может включать в себя информацию об альтернативном маршруте. Отображая положение и траекторию альтернативного маршрута на дисплее 53 терминала 5 управления, можно помочь оператору М выполнить определение в отношении выбора.
[0107]
(6) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения «информация выбора» может включать в себя количество поворотов для парковки на альтернативном маршруте. Отображая количество поворотов для парковки на альтернативном маршруте на дисплее 53 терминала 5 управления, можно помочь оператору М выполнить определение в отношении выбора.
[0108]
(7) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения «информация выбора» может включать в себя положение остановки движения на альтернативном маршруте. Отображая положение остановки движения на альтернативном маршруте на дисплее 53 терминала 5 управления, можно помочь оператору М выполнить определение в отношении выбора.
[0109]
(8) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения операционную информацию получают от оператора М, расположенного вне транспортного средства V1. Оператор M, находящийся вне транспортного средства V1, может определять окружение вокруг транспортного средства V1 с точки обзора, отличной от камер 1 и устройств 2 измерения расстояния транспортного средства V1. Посредством обеспечения информации выбора оператору M, расположенному вне транспортного средства V1, может быть выполнено надлежащее содержимое управления.
[0110]
(9) В устройстве 100 управления парковкой, в котором выполняется способ в соответствии с одним или более вариантами осуществления настоящего изобретения, также демонстрируются действия и эффекты, описанные в вышеприведенных пунктах (1) - (8).
[0111]
Варианты выполнения, поясняемые выше, описаны, чтобы способствовать пониманию настоящего изобретения, и не описаны для ограничения настоящего изобретения. Таким образом, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, находящиеся в рамках технического объема настоящего изобретения.
[Описание ссылочных позиций]
[0112]
1000 - Система управления парковкой
100 - Устройство управления парковкой
10 - Устройство управления
11 - ЦП
12 - ПЗУ
13 - ОЗУ
132 - Запоминающее устройство
133 - Картографическая информация
134 - Информация о парковке
135 - Информация об объектах
20 - Устройство ввода
21 - Устройство связи
211 - Антенны
30 - Устройство вывода
31 - Дисплей
1a-1d - Камеры
2 – Устройства измерения расстояния
3 - Информационный сервер
31 - Устройство связи
32 - Запоминающее устройство
33 - Картографическая информация
34 - Информация о парковке
35 - Информация об объектах
5 - Терминал управления
51 - Устройство связи
511 - Антенна
52 - Устройство ввода
53 - Дисплей
200 - Бортовое устройство
40 - Система привода
50 - Датчик угла рулевого управления
60 - Датчик скорости транспортного средства
70 – Контроллер транспортного средства
V, V1 - Транспортное средство.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2742530C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2738780C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736960C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2735340C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740111C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736520C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2733300C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2730808C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2744447C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2746684C1 |
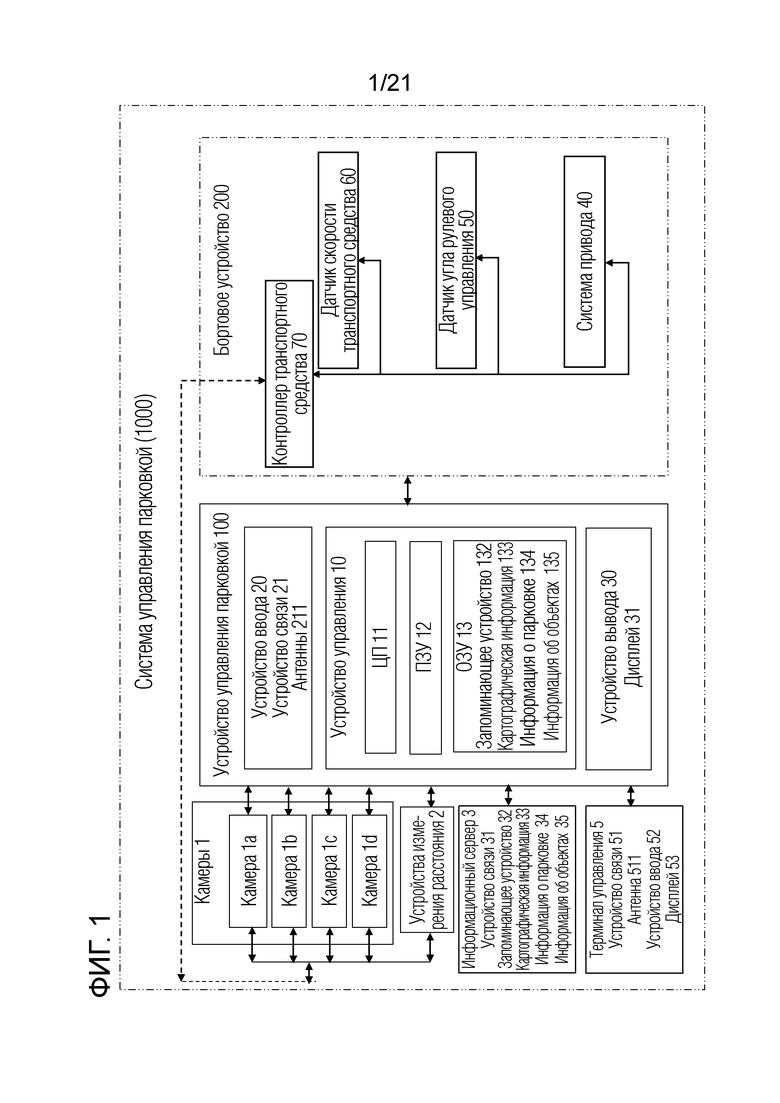
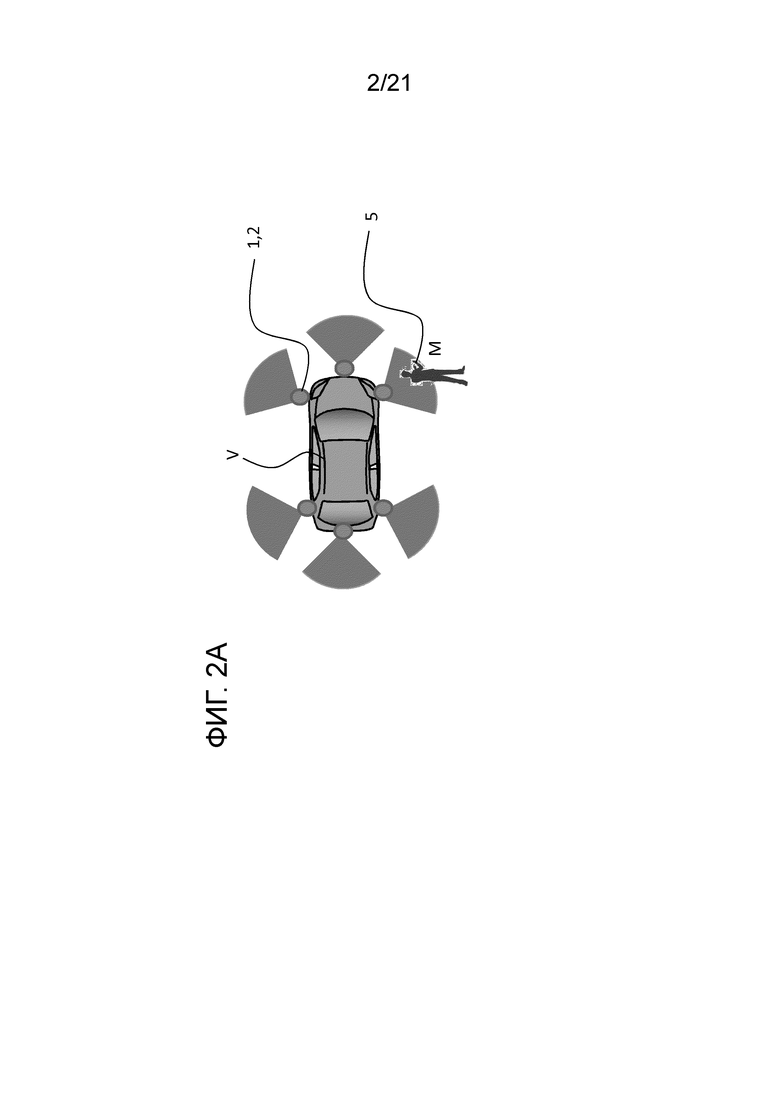
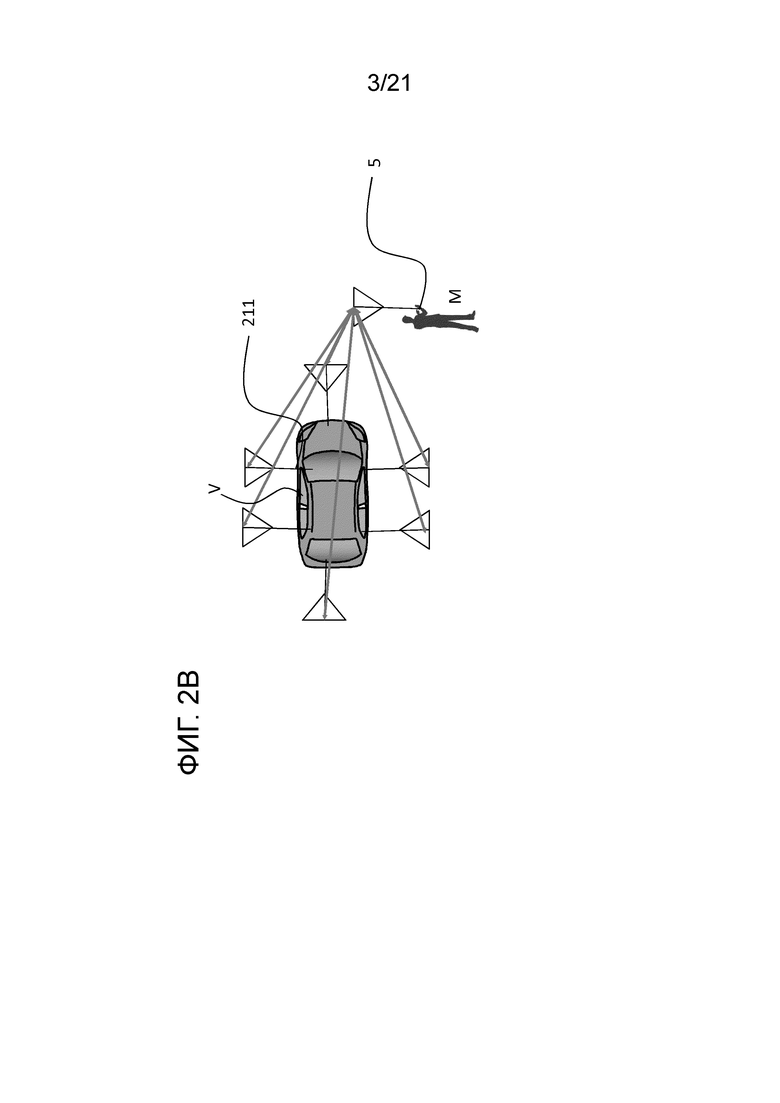
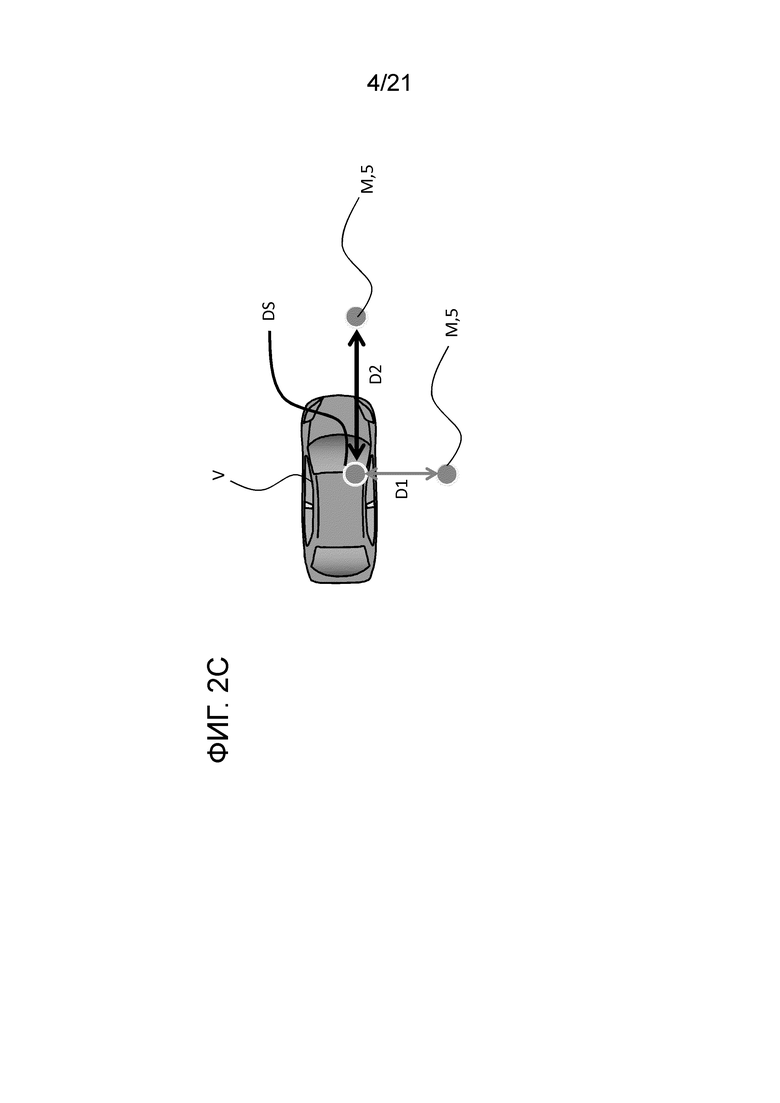
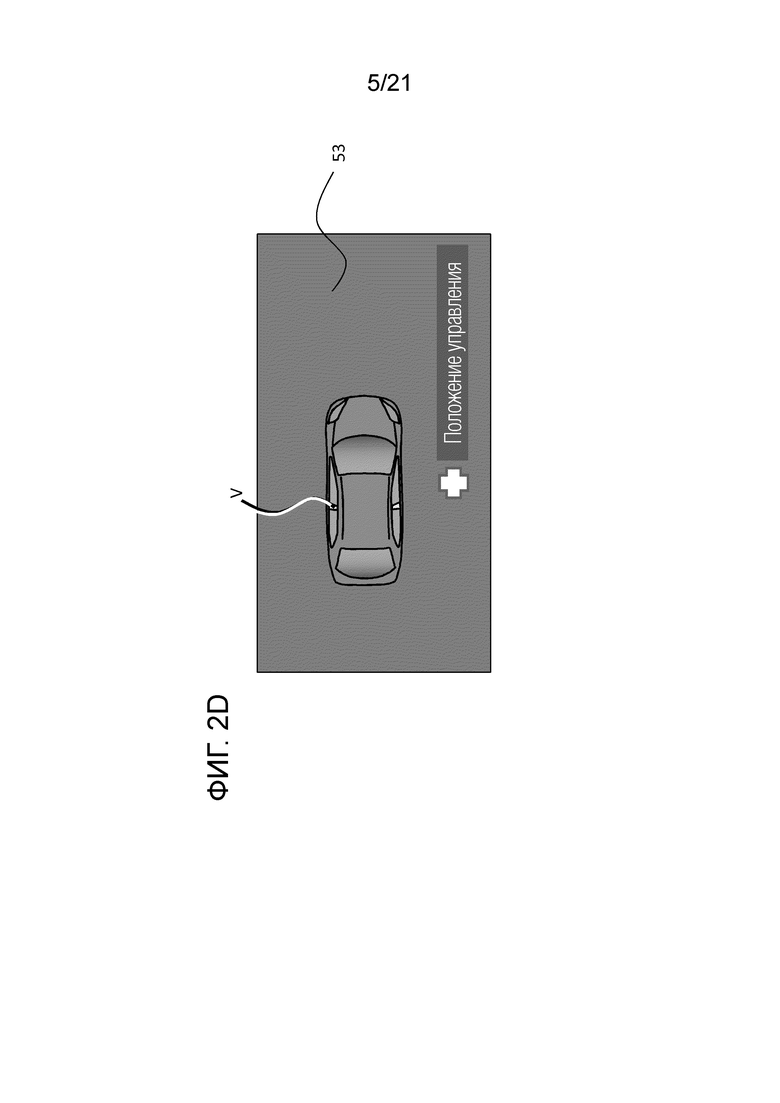
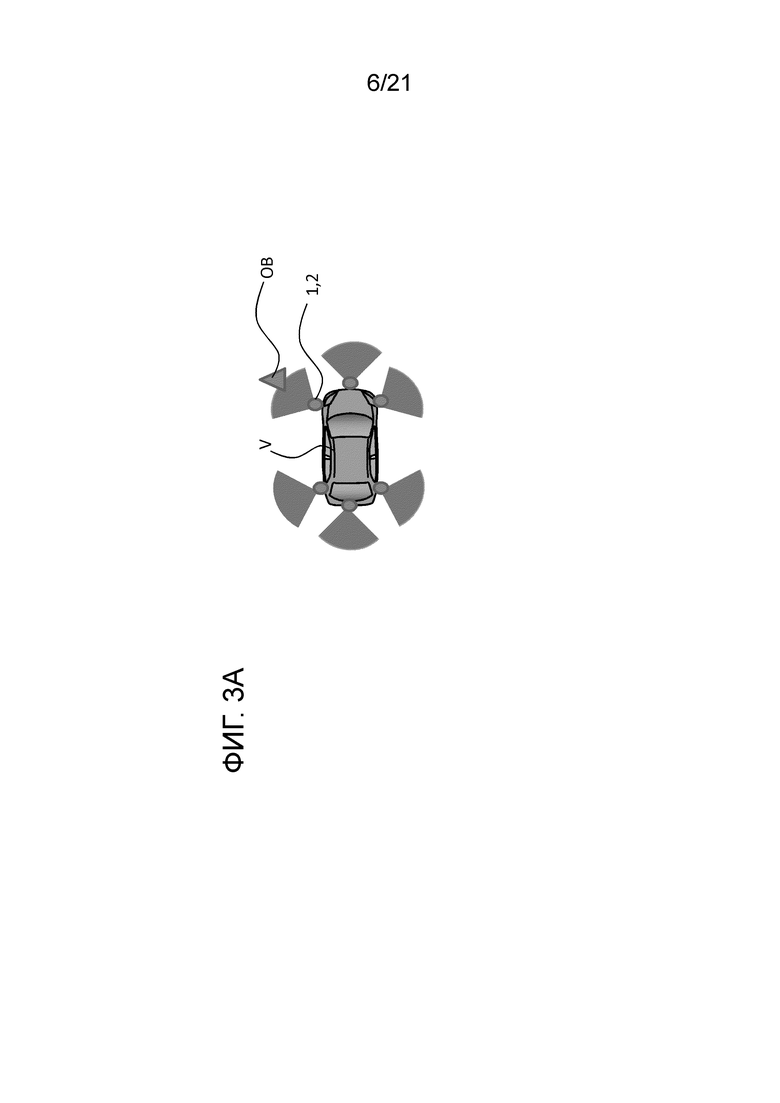
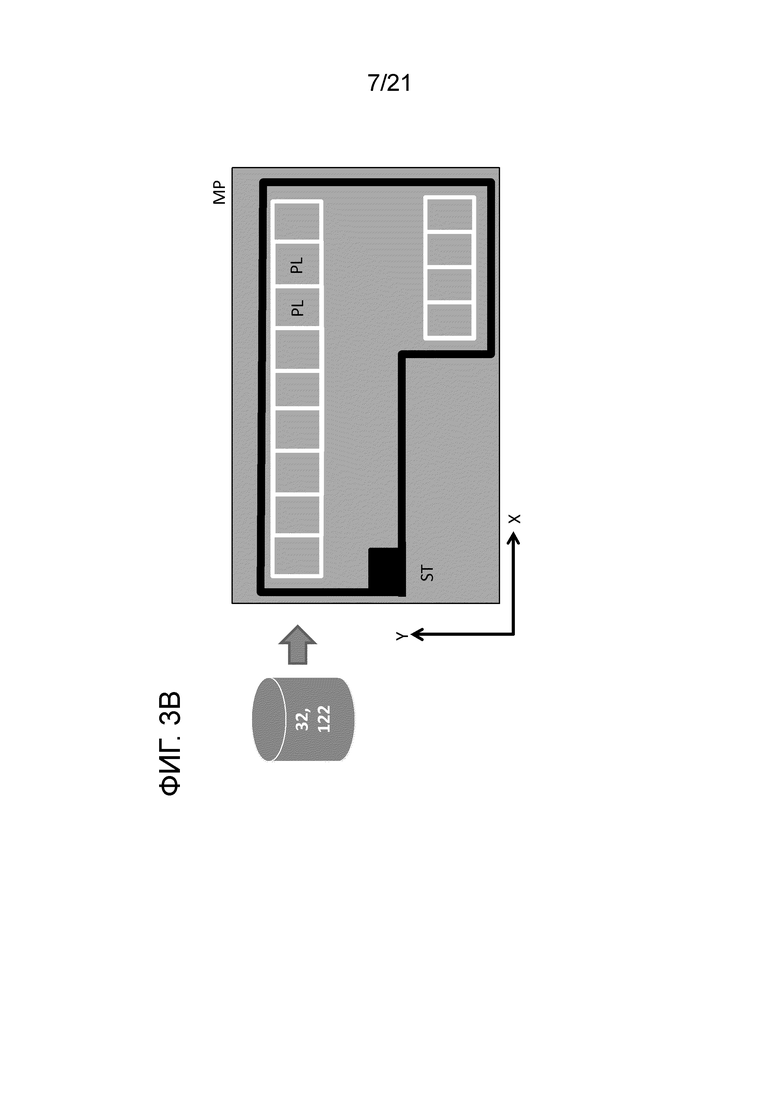
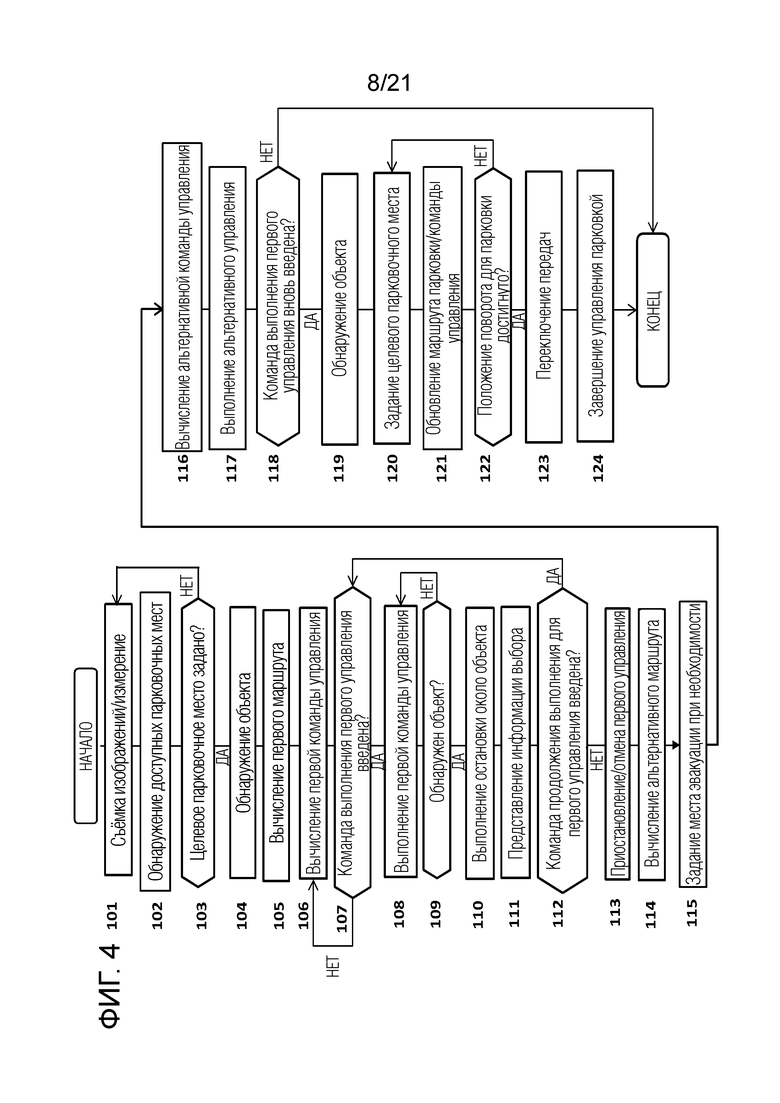
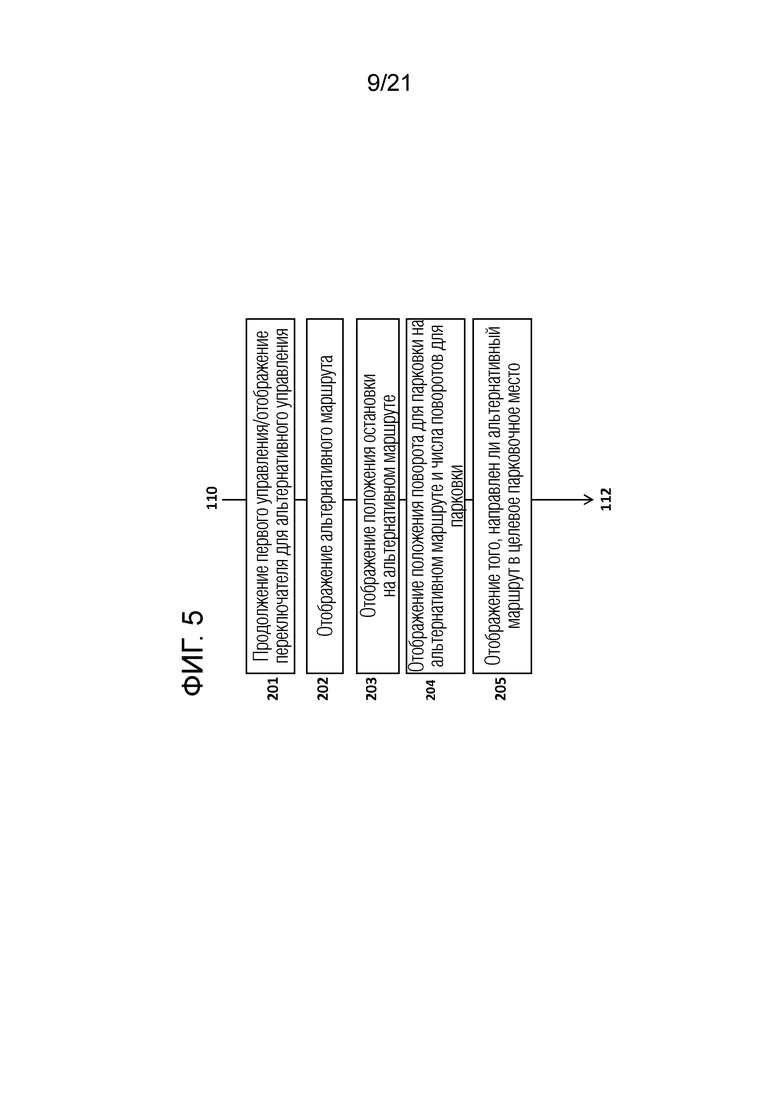
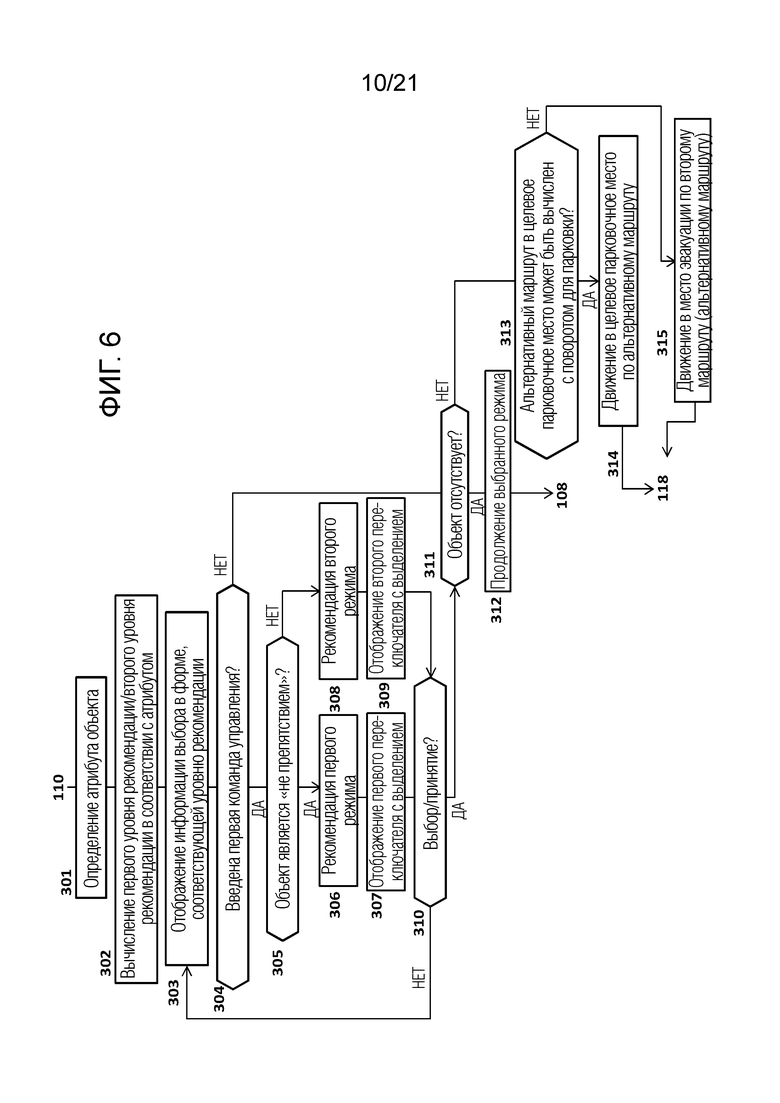
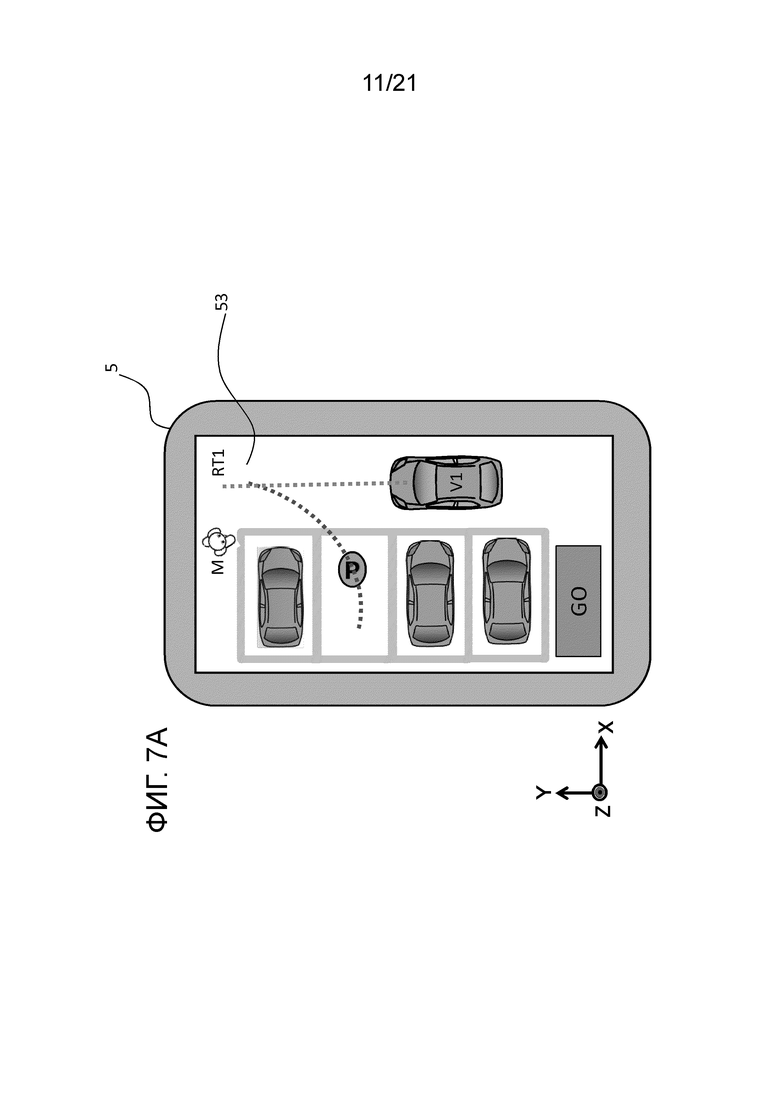
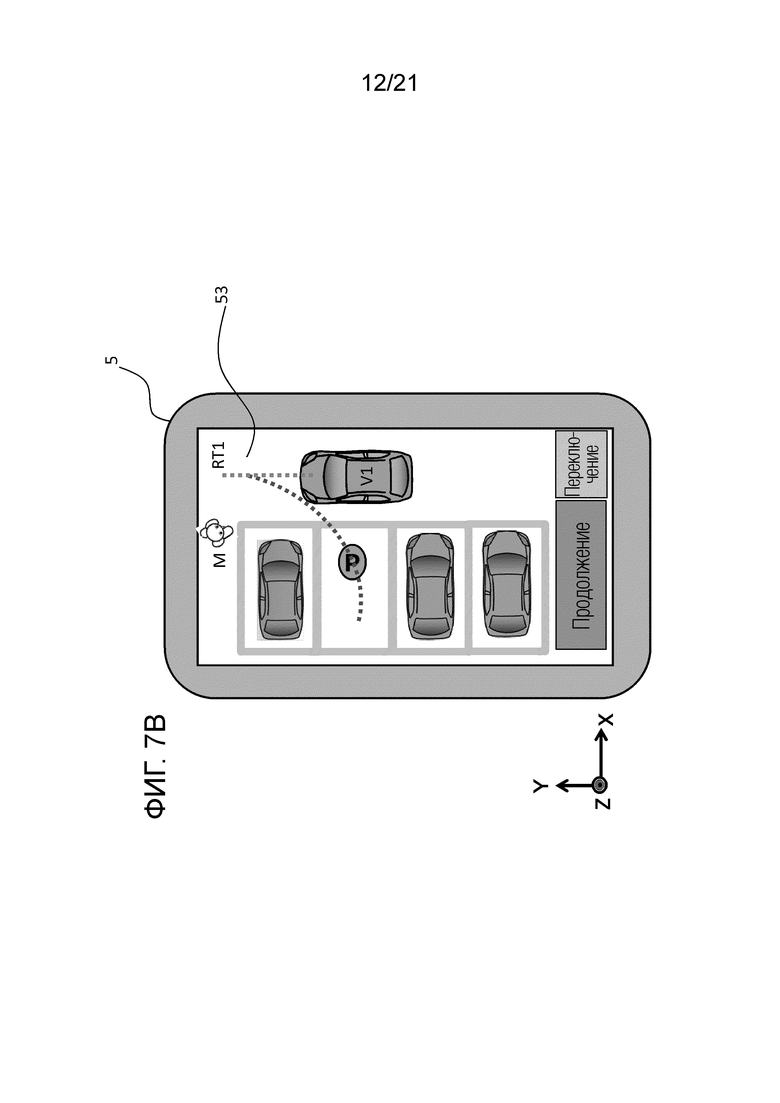
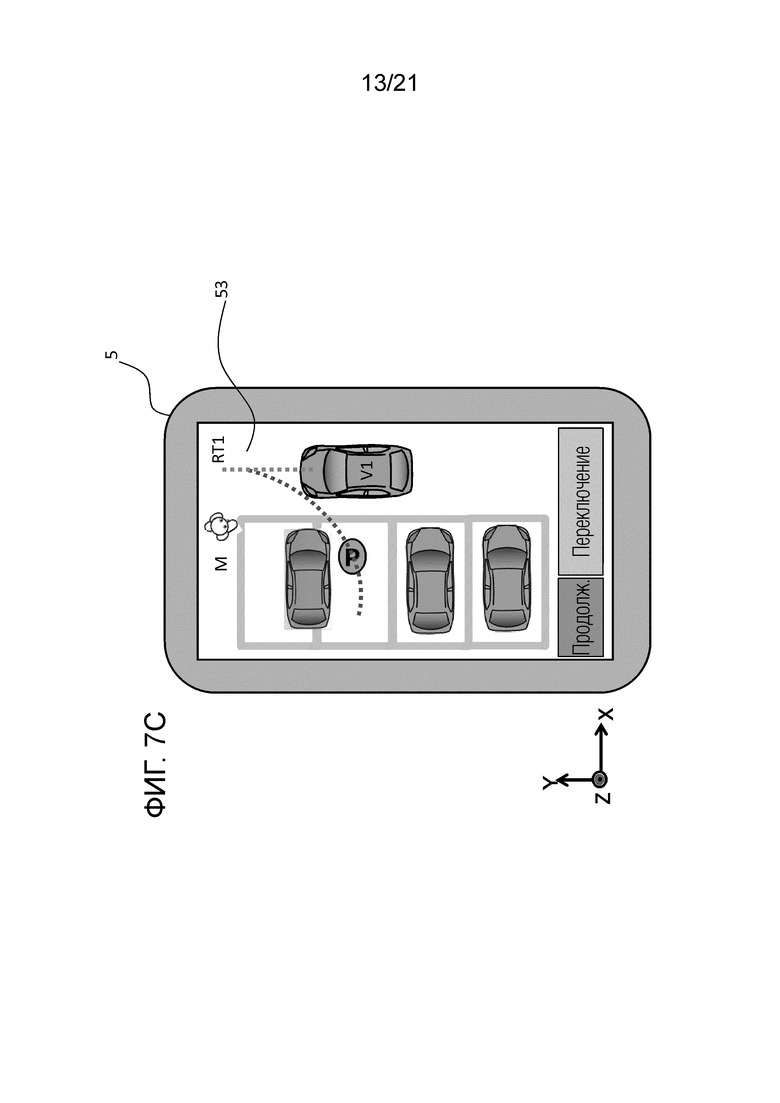
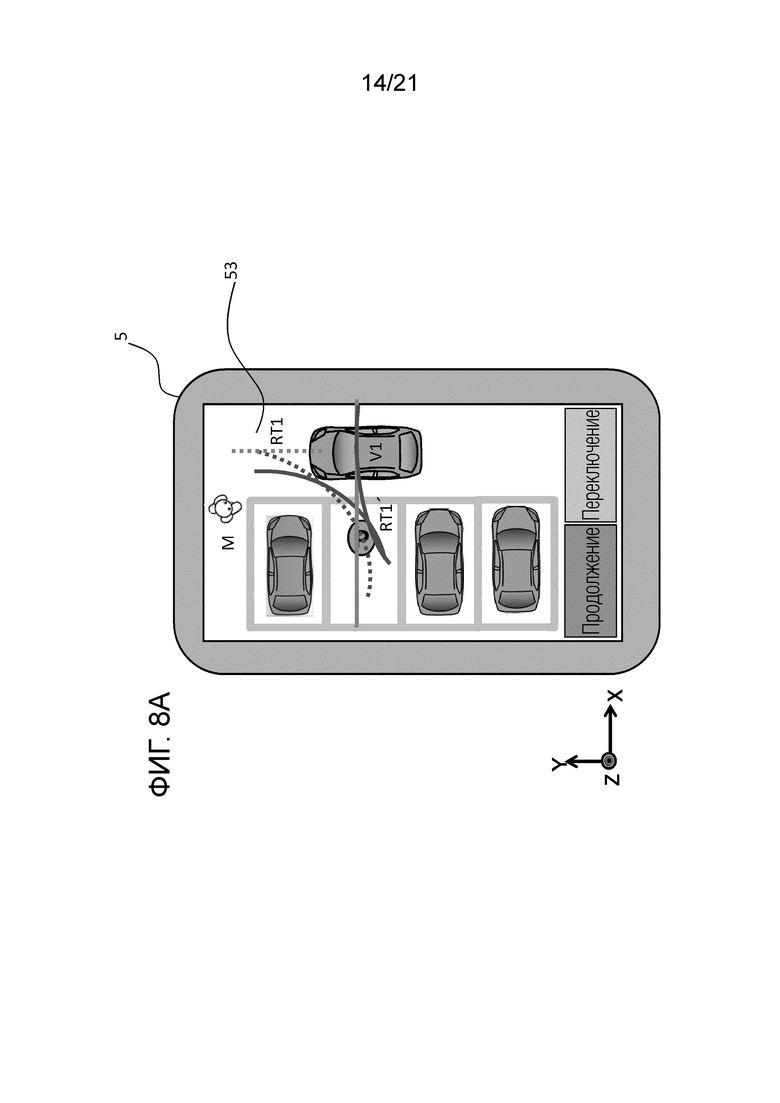
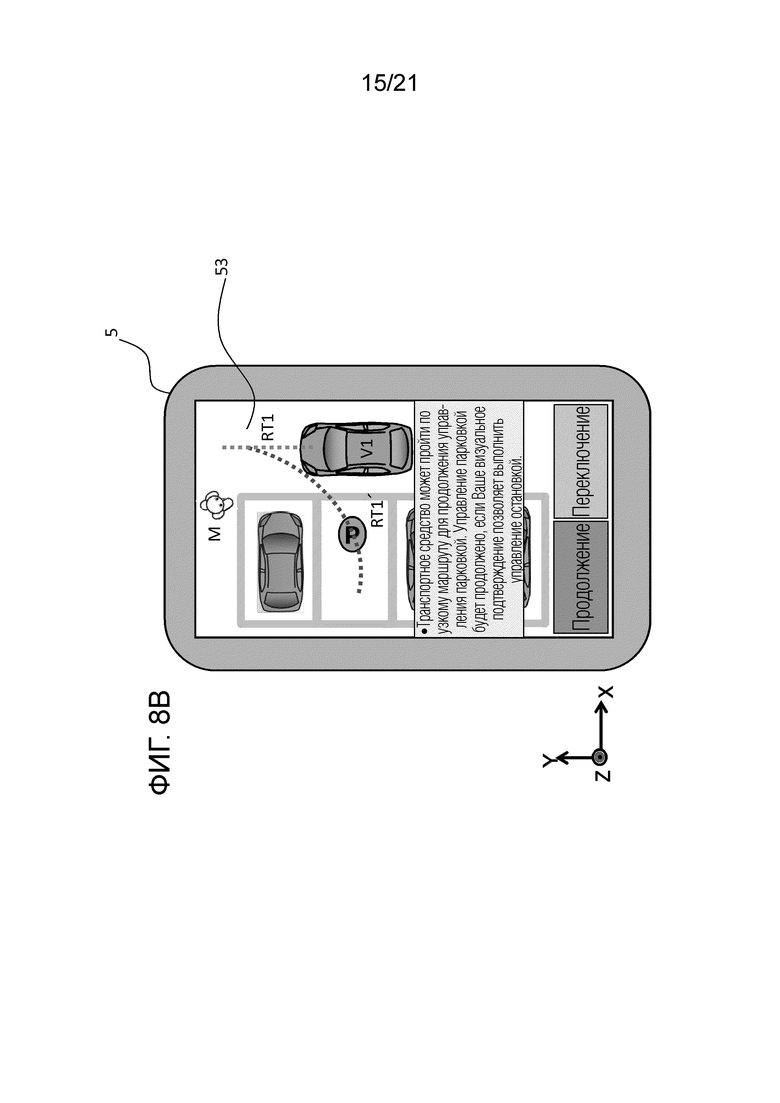
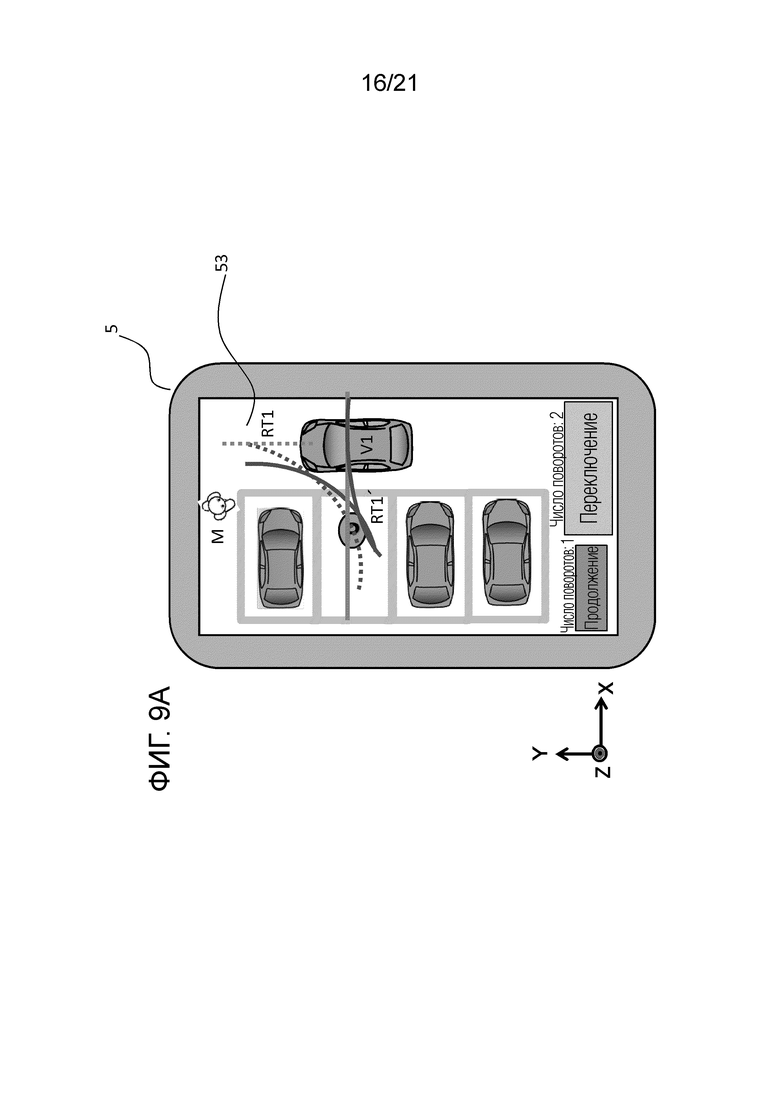
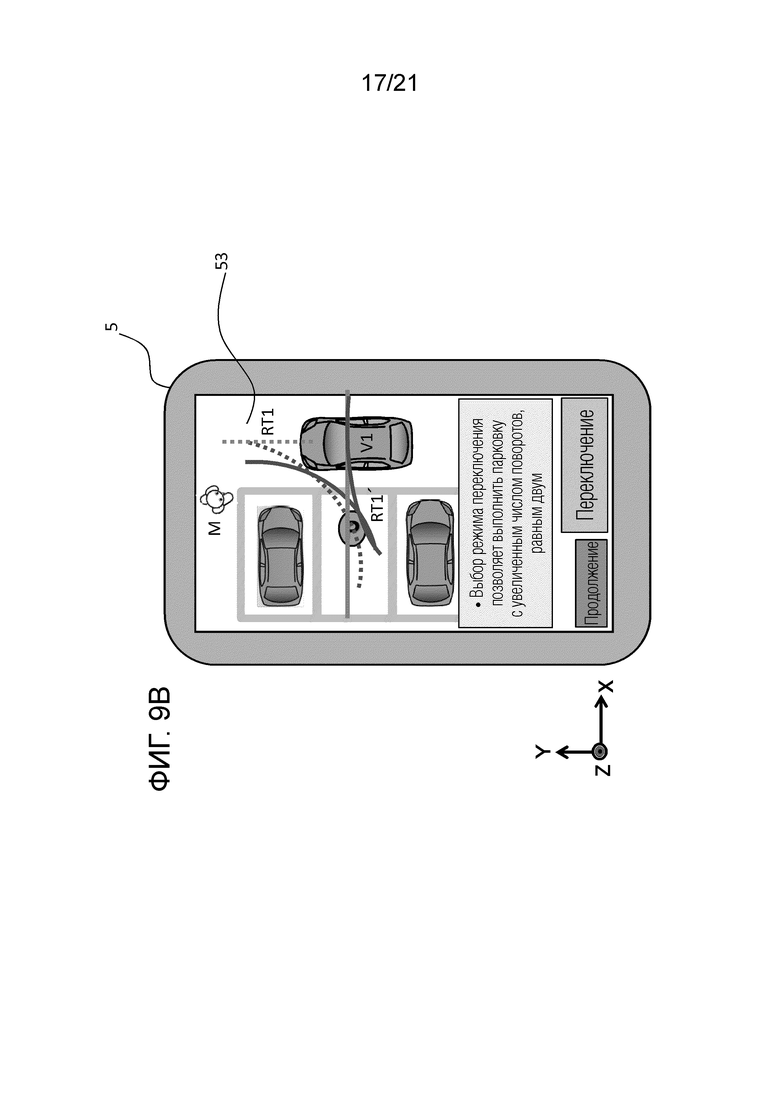
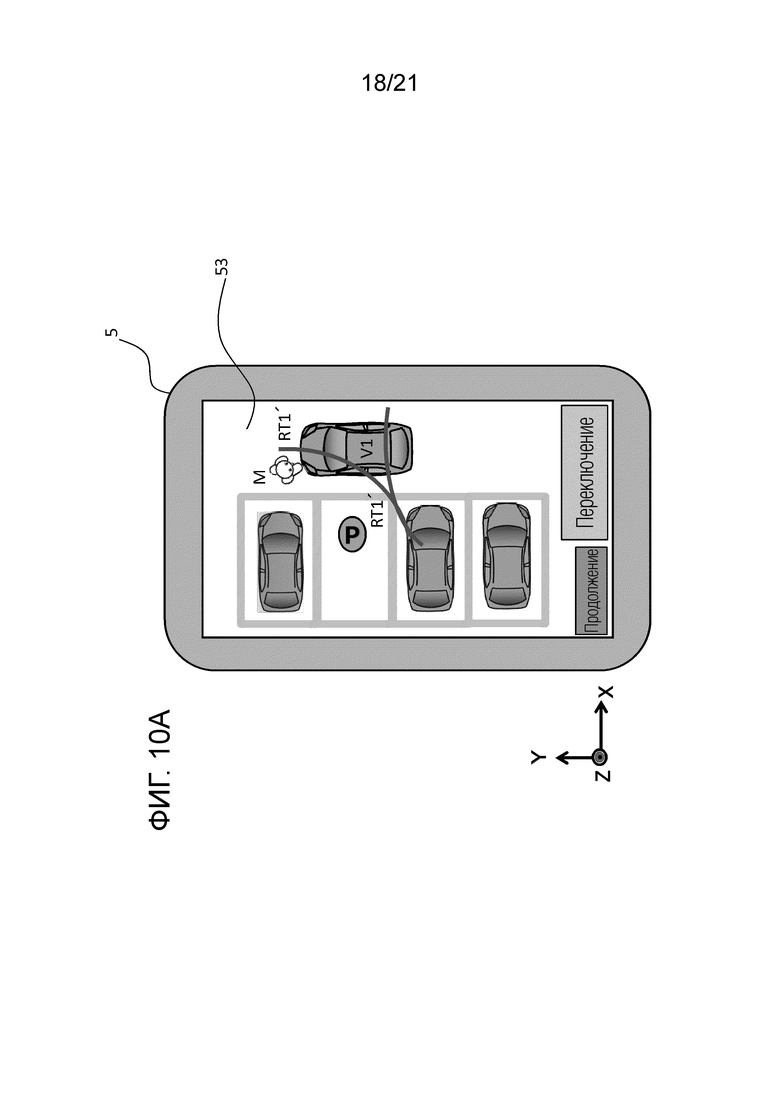
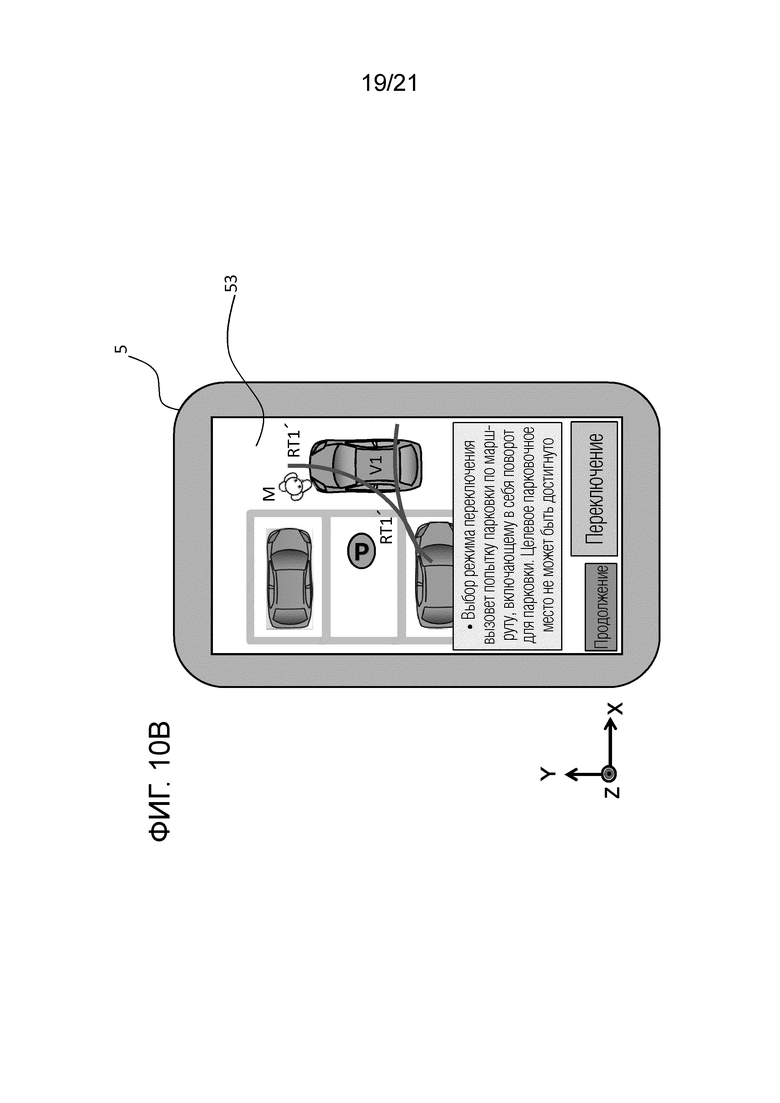

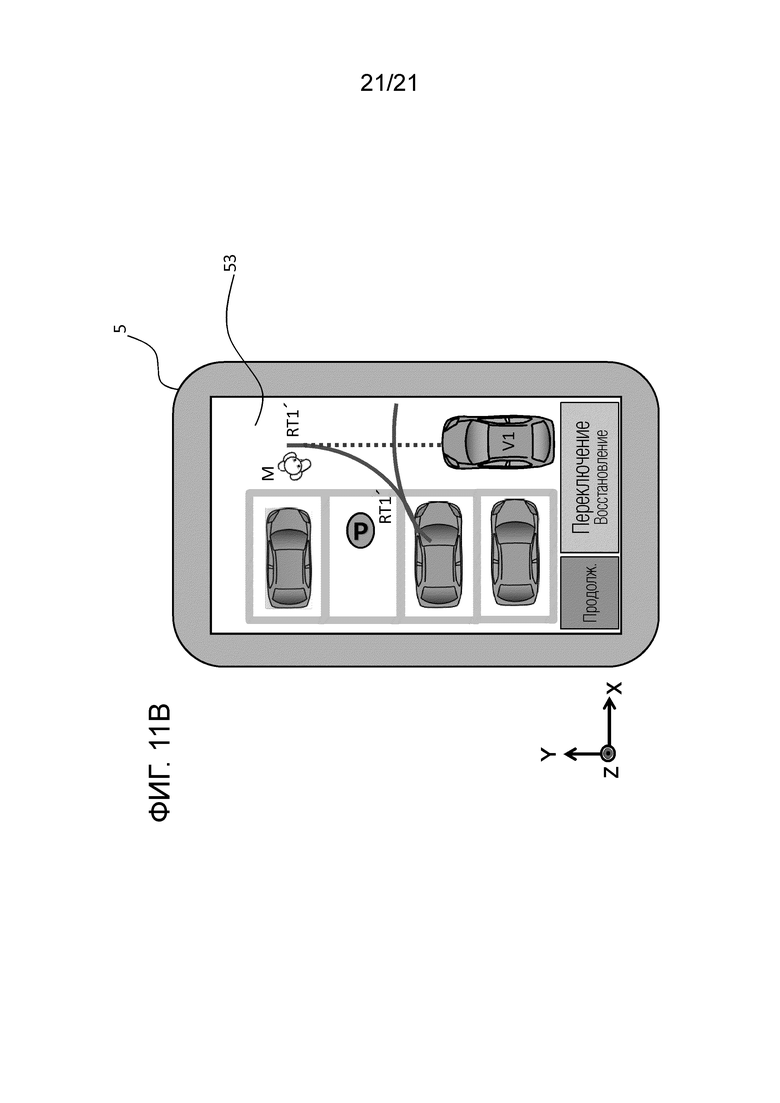
Изобретение относится к способу и устройству управления парковкой. Способ управления парковкой содержит этапы, на которых, при обнаружении объекта после начала выполнения первой команды управления, представляют оператору информацию выбора для выбора первого режима, в котором продолжается выполнение первой команды управления, или второго режима, в котором устройство управления транспортным средством побуждают выполнить альтернативную команду управления для движения транспортного средства по альтернативному маршруту, отличному от первого маршрута и побуждают устройство управления выполнить первую команду управления или альтернативную команду управления в соответствии с вводимой информацией выбора от оператора. Устройство управления парковкой содержит устройство управления, выполненное с возможностью выполнения первой команды управления для движения транспортного средства по первому маршруту к целевому парковочному месту, на основании операционной команды, полученной от оператора, расположенного вне транспортного средства. Достигается повышение безопасности. 2 н. и 7 з.п. ф-лы, 21 ил.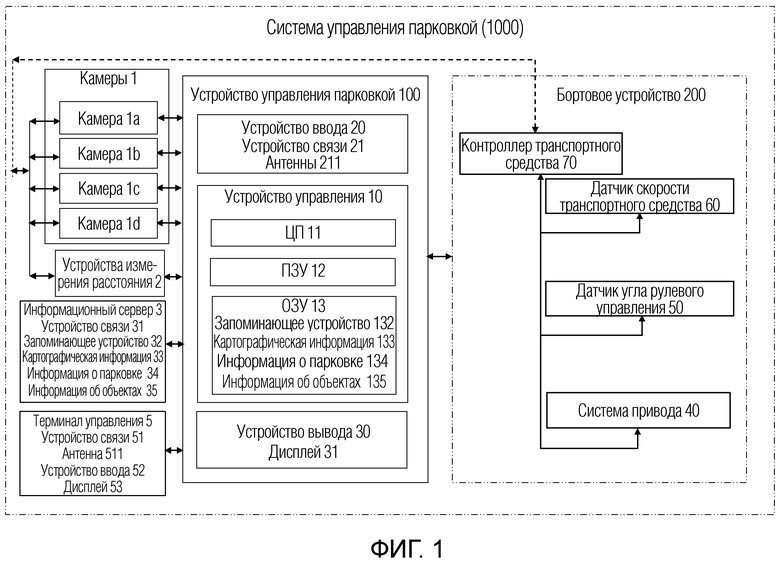
1. Способ управления парковкой для вычисления первой команды управления и побуждения устройства управления транспортным средством выполнить первую команду управления на основании операционной команды, полученной от оператора, причем первая команда управления предназначена для движения транспортного средства по первому маршруту в целевое парковочное место, причем способ управления парковкой содержит этапы, на которых:
при обнаружении объекта-препятствия, который препятствует движению транспортного средства по первому маршруту после задания целевого парковочного места и начала выполнения первой команды управления для движения транспортного средства по первому маршруту в заданное целевое парковочное место, вычисляют в качестве альтернативного маршрута маршрут, отличный от первого маршрута для движения транспортного средства в заданное целевое парковочное место, или маршрут для покидания транспортным средством заданного целевого парковочного места и движения в место эвакуации, причём место эвакуации не является парковочным местом;
представляют оператору информацию выбора для выбора первого режима, в котором продолжается выполнение первой команды управления, которая задана, или второго режима, в котором устройство управления транспортным средством побуждают выполнить альтернативную команду управления для движения транспортного средства по альтернативному маршруту, отличному от первого маршрута; и
побуждают устройство управления выполнить первую команду управления или альтернативную команду управления в соответствии с вводимой информацией выбора от оператора.
2. Способ управления парковкой по п.1, содержащий этапы, на которых:
при представлении информации выбора оператору
вычисляют первый уровень рекомендации для первого режима и второй уровень рекомендации для второго режима в соответствии с атрибутом обнаруженного объекта;
если первый уровень рекомендации имеет более высокое значение, чем второй уровень рекомендации, отображают первый переключатель для приема выбора первого режима с большим выделением, чем второй переключатель для приема выбора второго режима; и
если второй уровень рекомендации имеет более высокое значение, чем первый уровень рекомендации, отображают второй переключатель для приема выбора второго режима с большим выделением, чем первый переключатель для приема выбора первого режима.
3. Способ управления парковкой по п.2, содержащий этап, на котором:
вычисляют значение второго уровня рекомендации как более высокое значение по мере увеличения расстояния между оператором и транспортным средством.
4. Способ управления парковкой по любому из пп.1-3, в котором
альтернативный маршрут включает в себя маршрут к целевому парковочному месту и второй маршрут для покидания транспортным средством целевого парковочного места, и
информация выбора включает в себя вариант режима восстановления для побуждения устройства управления выполнять вторую команду управления для движения по второму маршруту.
5. Способ управления парковкой по любому из пп.1-4, в котором информация выбора включает в себя информацию об альтернативном маршруте.
6. Способ управления парковкой по любому из пп.1-5, в котором информация выбора включает в себя количество поворотов для парковки на альтернативном маршруте.
7. Способ управления парковкой по любому из пп.1-6, в котором информация выбора включает в себя положение остановки движения на альтернативном маршруте.
8. Способ управления парковкой по любому из пп.1-6, в котором операционную команду получают от оператора, расположенного вне транспортного средства.
9. Устройство управления парковкой, содержащее устройство управления, выполненное с возможностью выполнения первой команды управления для движения транспортного средства по первому маршруту к целевому парковочному месту, на основании операционной команды, полученной от оператора, расположенного вне транспортного средства, причем устройство управления работает для:
при обнаружении объекта-препятствия, который препятствует движению транспортного средства по первому маршруту после задания целевого парковочного места и начала выполнения первой команды управления для движения транспортного средства по первому маршруту в заданное целевое парковочное место, вычисления, в качестве альтернативного маршрута, маршрута, отличного от первого маршрута для движения транспортного средства в заданное целевое парковочное место, или маршрута для покидания транспортным средством заданного целевого парковочного места и движения в место эвакуации, причём место эвакуации не является парковочным местом;
представления на терминале управления, управляемом оператором, информации выбора для выбора первого режима, в котором продолжается процесс выполнения для первой команды управления, которая задана, или второго режима, в котором устройство управления транспортным средством побуждают выполнить альтернативную команду управления для движения транспортного средства по альтернативному маршруту, отличному от первого маршрута; и
выполнения первой команды управления или альтернативной команды управления в соответствии с вводимой информацией выбора, которая вводится оператором в терминал управления.
| WO 2017068695 A1, 27.04.2017 | |||
| JP 5794451 B2, 14.10.2015 | |||
| US 2015161890 A1, 11.06.2015 | |||
| US 8922394 B2, 30.12.2014. |

