Изобретение относится к медицинской технике, а именно к хирургическому инструменту для измерения усилия и может быть использовано в медицинских исследованиях с целью измерения усилия, необходимого для разрыва биологической ткани, а также в роботизированных хирургических системах (например, для калибровки или дополнительного контроля роботизированного устройства).
На сегодняшний день в области медицинской техники активно развивается направление по разработке роботизированных хирургических систем. Такие устройства значительно расширяют возможности хирургов и повышают точность манипуляций. Данные системы традиционно оснащены приборами для измерения усилия и обратной связью [1].
Известно хирургическое устройство для использования хирургом в ходе офтальмологической хирургической процедуры, содержащее по меньшей мере один герметичный стерилизованный хирургический пакет, выполненный с возможностью вскрытия перед хирургической процедурой и выбрасывания после единственной хирургической процедуры или после ограниченного количества хирургических процедур [2]. По меньшей мере один герметичный стерилизованный хирургический пакет содержит стерильный хирургический прибор и стерильный хирургический планшет.Стерильный хирургический планшет имеет верхнюю поверхность, выполненную так, чтобы она являлась частью стерильного поля хирургической процедуры. Стерильный хирургический планшет также содержит стенки, определяющие углубление, выполненное с размером и возможностью вмещения многоразового нестерильного модуля. Углубление выполнено с возможностью герметизации многоразового нестерильного модуля с целью изоляции многоразового нестерильного модуля от стерильного поля хирургической процедуры. Стенки стерильного хирургического планшета содержат по меньшей мере одно средство сопряжения, расположенное и выполненное с возможностью использования по меньшей мере одной функции многоразового нестерильного модуля в стерильном поле хирургической процедуры снаружи углубления. По меньшей мере одно средство сопряжения содержит по меньшей мере соединение электронной связи, выполненное с возможностью установления электронной связи электронного контроллера многоразового нестерильного модуля со стерильным хирургическим планшетом или стерильным хирургическим прибором. Стерильный хирургический планшет имеет свернутую конфигурацию для перевозки и развернутую конфигурацию для хирургического использования. Во втором варианте выполнения вышеуказанное хирургическое устройство содержит по меньшей мере один герметичный стерилизованный хирургический пакет.По меньшей мере один герметичный стерилизованный хирургический пакет содержит стерильный хирургический прибор и стерильный хирургический планшет. Стерильный хирургический планшет имеет верхнюю поверхность, выполненную так, чтобы она являлась частью стерильного поля хирургической процедуры, и нижнюю поверхность, выполненную с размером и возможностью соединения с верхней поверхностью или опоры на верхнюю поверхность многоразовой опорной конструкции. Многоразовая опорная конструкция содержит по меньшей мере одно из следующего: двигатель, источник света, дисплей пользовательского интерфейса, источник питания и компьютерный процессор. Стерильный хирургический планшет содержит по меньшей мере одно из следующего: механическую связь для передачи вращательного движения от двигателя опорной конструкции к гидравлическому насосу, соединенному со стерильным хирургическим планшетом, светопередающую связь для передачи света от источника света опорной конструкции к стерильному хирургическому прибору, прозрачный материал, расположенный для обеспечения видимости дисплея пользовательского интерфейса опорной конструкции сквозь упомянутый материал в стерильном поле хирургической процедуры, электрическую связь для передачи электроэнергии из источника питания опорной конструкции к стерильному хирургическому планшету и соединение для электронной связи для передачи электрических сигналов из компьютерного процессора к стерильному хирургическому планшету. В третьем варианте выполнения выше представленное хирургическое устройство содержит по меньшей мере один герметичный стерилизованный хирургический пакет. По меньшей мере один герметичный стерилизованный хирургический пакет содержит по меньшей мере один из следующих модулей: стерильный инфузионный модуль и стерильный аспирационный модуль. Каждый из стерильных инфузионного и аспирационного модулей, содержит корпус, насос для перекачивания жидкостей в область хирургического вмешательства и из области хирургического вмешательства и двигатель. Корпус содержит стенки, выполненные с размером и возможностью вмещения в углубление многоразовой опорной конструкции с возможностью извлечения, и по меньшей мере одну наружную поверхность, выполненную так, чтобы она являлась частью стерильного поля хирургической процедуры. Стерильный инфузионный модуль выполнен с возможностью перекачивания жидкостей в область хирургического вмешательства, а стерильный аспирационный модуль выполнен с возможностью перекачивания жидкостей из области хирургического вмешательства. По меньшей мере один герметичный стерилизованный хирургический пакет дополнительно содержит стерильный хирургический прибор и держатель стерильного хирургического прибора. Держатель стерильного хирургического прибора имеет верхнюю поверхность, выполненную так, чтобы она являлась частью стерильного поля хирургической процедуры. Верхняя поверхность содержит приемную часть для расположения в ней или на ней стерильного хирургического прибора. Держатель стерильного хирургического прибора также имеет нижнюю поверхность, выполненную с размером и возможностью вмещения в другое углубление многоразовой опорной конструкции. В одном из вариантов реализации устройство может содержать чувствительную к давлению кнопку, выполненную с возможностью измерения усилия хирурга.
Известна система с возможностью оценки усилия на роботохирургическом инструменте [3], включающая манипулятор и систему оценки сил, воздействующих на инструмент в течение хирургической операции. Манипулятор имеет опору, сконфигурированную для закрепления троакара и для закрепления привода хирургического инструмента. Система оценки сил включает трехосевой нижний тензометрический датчик, трехосевой верхний тензометрический датчик, датчик усилия захвата исполнительных поверхностей инструмента и датчик момента вращения хирургического инструмента. Трехосевой нижний тензометрический датчик расположен на опоре манипулятора в месте закрепления троакара и находится в непосредственном контакте с ним. Трехосевой верхний тензометрический датчик расположен на опоре манипулятора под приводом хирургического инструмента. Датчик усилия захвата выполнен в виде датчика силы тока для электродвигателя привода инструмента, обеспечивающего сжатие исполнительных поверхностей инструмента. Датчик момента вращения выполнен в виде датчика силы тока для электродвигателя привода инструмента, обеспечивающего вращение хирургического инструмента вокруг его продольной оси. Тензометрические датчики соединены с модулями цифровой обработки данных. Датчик усилия захвата и датчик момента вращения соединены с системами управления электродвигателем. Модули цифровой обработки и системы управления электродвигателями соединены с модулем обработки, который запрограммирован для осуществления вычисления: сил, направленных вдоль линейных осей; вращательных моментов инструмента вдоль осей х и у относительно точки ввода троакара в тело пациента; вращательного момента инструмента вдоль оси z относительно точки ввода троакара в тело пациента; усилия сжатия исполнительных поверхностей инструмента. Каждый модуль цифровой обработки запрограммирован для использования цифрового фильтра нижних частот и алгоритма полосно-заграждающего фильтра для данных усилия, измеренных тензометрическим датчиком. Модуль обработки запрограммирован для: компенсации силы тяжести, действующей на опору манипулятора и инструмента; компенсации сил, вызываемых сопротивлением троакара движению инструмента; компенсации динамических характеристик элементов, размещенных на оси вращения электродвигателей. Модуль обработки выполнен с возможностью передачи данных на систему управления роботохирургическим комплексом.
Наиболее близким к заявляемому устройству является система для измерения усилия, используемая в хирургическом манипуляторе [1]. Данная система оснащена упругим подвесом для определения поперечной составляющей рабочей силы, состоящим из восьми упругих элементов с расположенными на них тензорезисторами, и пъезодатчиком силы для измерения осевой составляющей рабочей силы. Также данная система оснащена модулем обработки сигналов с датчиков.
Вышеприведенные технические решения являются достаточно сложными в изготовлении и их невозможно использовать для измерения усилия в мануальных инструментах.
Технической проблемой является необходимость разработки простой в изготовлении и использовании насадки на хирургический инструмент для измерения усилия, лишенной вышеприведенных недостатков.
Технический результат состоит в упрощении конструкции и обеспечении возможности точного измерения усилия на различных хирургических инструментах.
Технический результат достигается тем, что в насадке на хирургический инструмент для измерения усилия, включающей крепление на хирургический инструмент, соединенные с ним датчики и модуль обработки информации, связанный с датчиками, согласно изобретению, в качестве датчиков используют резистивные тонкопленочные датчики давления с гибкими чувствительными к силе резисторами.
В предпочтительном варианте реализации изобретения насадка содержит четыре датчика, расположенных радиально по отношению к оси хирургического инструмента. Также в предпочтительном варианте реализации датчики и модуль обработки информации связаны с помощью проводов. Также в предпочтительном варианте реализации изобретения используют модуль обработки информации Arduino и совместимые с ним датчики.
Использование резистивных тонкопленочных датчиков давления с гибкими чувствительными к силе резисторами обеспечивает наиболее точное измерение усилия на хирургическом инструменте. При этом было выявлено, что наибольшая точность измерений достигается при использовании четырех датчиков и расположении их радиально по отношению к оси хирургического инструмента.
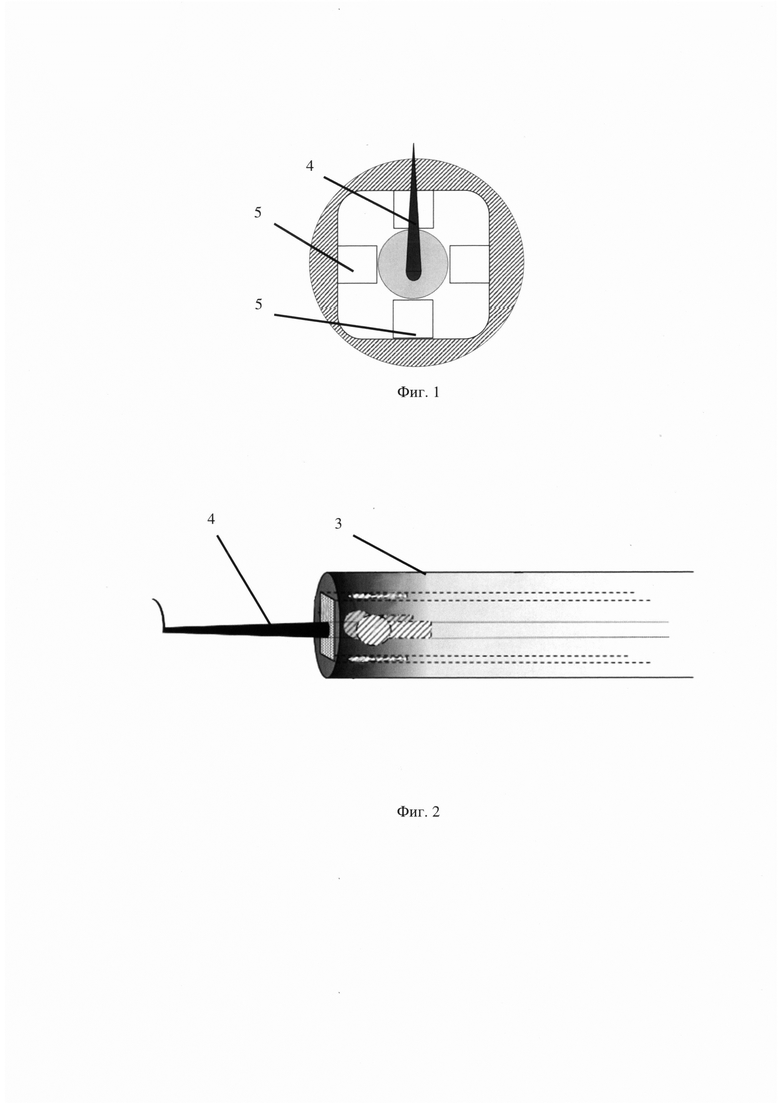
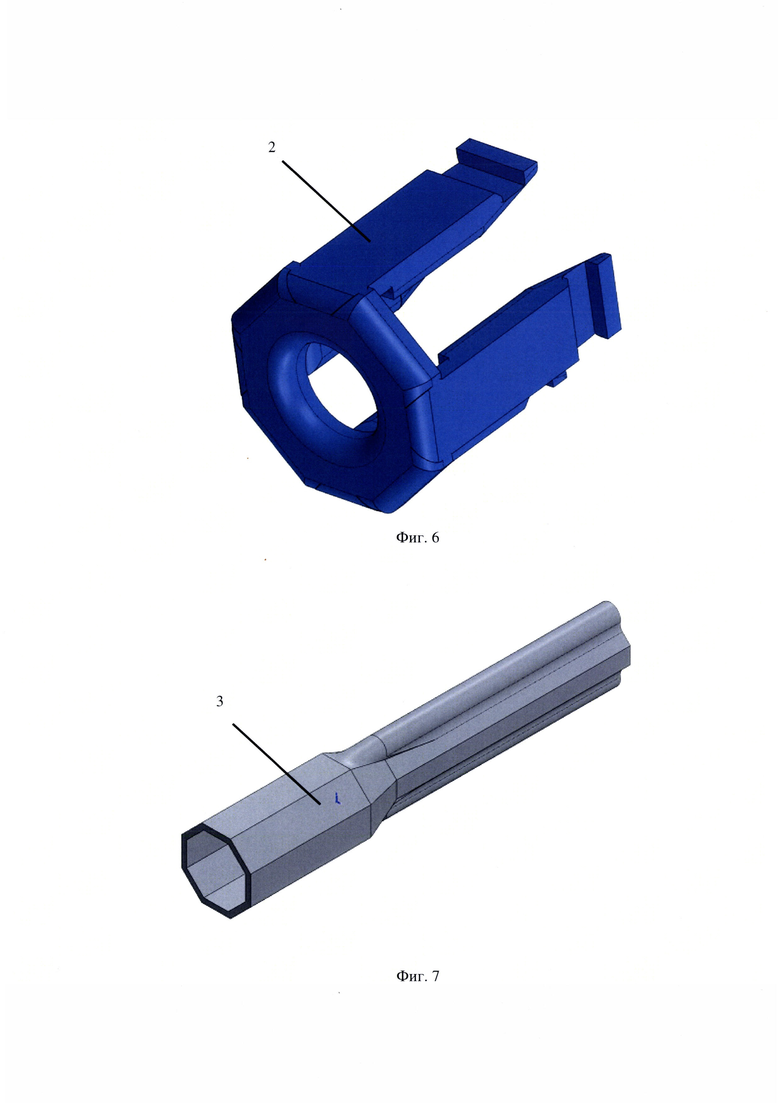
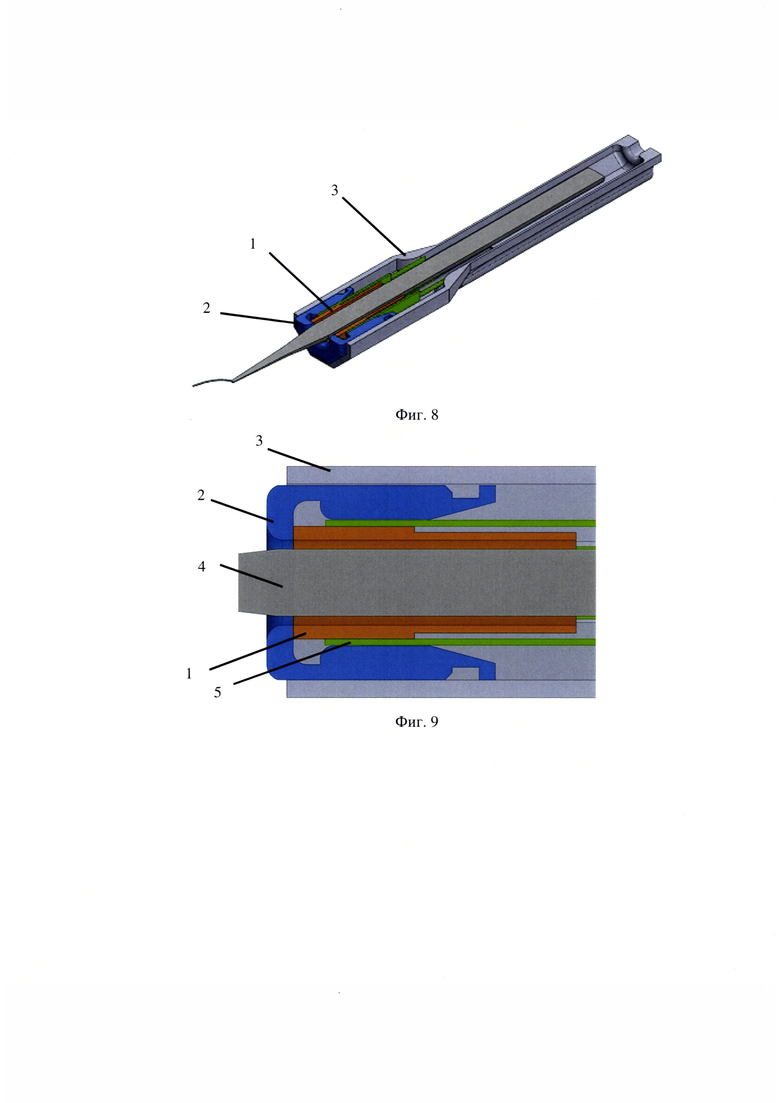
Заявляемое изобретение поясняется чертежами, где на фиг. 1 представлено схематическое изображение насадки в поперечном разрезе, а на фиг. 2 представлено схематическое изображение установленной на хирургический инструмент насадки в виде сбоку с применением эффекта прозрачности на корпусе хирургического инструмента, а на фиг. 3 схематическое изображение установленной на хирургический инструмент насадки в продольном разрезе, вид сбоку. На фиг. 4 представлено заявляемое устройство в сборе с Power bank. На фиг. 5 представлена оправка крепления, на фиг. 6 - дополнительная оправка, на фиг. 7 - оболочка крепления, а на фиг. 8 и 9 - часть устройства с хирургическим инструментом в продольном разрезе.
Насадка на хирургический инструмент для измерения усилия включает крепление на хирургический инструмент, которое предпочтительно выполнено из трех элементов - оправки 1, дополнительной оправки 2 и оболочки 3 крепления. Оправка 1 выполнена в виде втулки и ее внутренний диаметр подбирают так, чтобы она имела возможность жесткого закрепления на хирургическом инструменте 4. Дополнительная оправка 2 включает основу и четыре ножки, расположенные на равном расстоянии друг от друга и предназначенные для сопряжения с участками оправки 1, на которые должны быть расположены датчики 5 (при сборке устройства дополнительная оправка прилагает к датчикам). Оболочка 3 крепления содержит полость для помещения оправки 1 и дополнительной оправки 2, причем размеры этой полости обеспечивают фиксацию дополнительной оправки 2 между оболочкой 3 и оправкой 1. Также оболочка крепления содержит полость для выступающих из оправки 1 участков хирургического инструмента 4 и два канала для проводов.
К креплению на хирургический инструмент прикреплены резистивные тонкопленочные датчики 5 давления с гибкими чувствительными к силе резисторами. Предпочтительно датчики приклеены к оправке 1 в участках, сопряженных с ножками дополнительной оправки 2. Предпочтительно устройство содержит четыре датчика 5, расположенных таким образом, чтобы при установке насадки на хирургический инструмент 4 они оказались расположены радиально по отношению к его оси. Также насадка содержит блок обработки информации 6, связанный с датчиками 5 и креплением. В предпочтительном варианте реализации изобретения датчики 5 и модуль обработки 6 информации связаны между собой с помощью проводов. Причем данные провода проведены через каналы в оболочке 3 крепления. Также в предпочтительном варианте реализации используют модуль обработки информации Arduino и совместимые с ним датчики. Предпочтительно насадка представляет собой отдельное устройство, пригодное для использования с разными хирургическими инструментами (в зависимости от конкретного исполнения крепления). При этом возможен вариант реализации, в котором насадку устанавливают на хирургический инструмент (например, на офтальмохирургический шпатель) с помощью сборочных операций на заводе-изготовителе.
В предпочтительном варианте реализации изобретения блок обработки данных 6 содержит корпус, состоящий из коробки и крышки. Внутри коробки располагается электроника и она содержит пять отверстий - четыре для крепления и одно для провода, который связывает Arduino и Power bank. Крышка содержит в ней четыре отверстия под крепление и одно отверстие под провода, идущие от датчиков. Также блок обработки данных 6 содержит кроме Arduino следующие элементы: Bluetooth-модуль НС-05, макетная плата, резисторы и провода.
Также в предпочтительном варианте устройство содержит крепление Power bank 7 с кнопкой включения, к которому подключен аккумулятор. С помощью этого блока происходит передача электроэнергии на блок обработки информации 6 и, соответственно, на все устройство.
В еще одном из вариантов реализации изобретение может включать индикатор усилия, расположенный на оболочке 3 крепления. Индикатор может быть выполнен в виде одного или нескольких светодиодов, а сама индикация может быть осуществлена следующим образом. При настройке модуля обработки информации 6 может быть задан допустимый диапазон усилия и при нахождении в таком диапазоне за счет светодиода или светодиодов будет загораться зеленый индикатор, а при выходе за пределы такого диапазона может загораться красный индикатор. Также могут быть предусмотрены дополнительные «пограничные» диапазоны, при нахождении значения усилия в которых будет загораться желтый индикатор.
Заявляемое устройство работает следующим образом.
Насадку устанавливают на хирургический инструмент 4 с помощью крепления (фиксируют крепление ближе к рабочему концу инструмента) или используют предварительно собранное устройство с установленным инструментом. Затем устройство включают с помощью кнопки на Power bank 7 и датчики 5 начинают отправлять информацию об усилии, прилагаемом хирургическим инструментом на область тела человека, в условных единицах на модуль обработки информации 6. Данные постоянно отправляются от Arduino на компьютер через Bluetooth. В начале работы осуществляется автоматическая калибровка устройства с помощью модуля обработки информации 6 (значение от каждого датчика принимается за 0). Далее хирург начинает использовать инструмент с насадкой по назначению и в процессе работы хирурга датчики 5 постоянно фиксируют усилие и отправляют соответствующие данные на модуль обработки информации 6. Затем данные об усилии подвергают фильтрации с помощью фильтра Баттерворта (фильтр с бесконечной импульсной характеристикой (БИХ-фильтр)). После модуль обработки информации 6 переводит данные в Ньютоны и строит график с усилием в Ньютонах на оси ординат и временем на оси абсцисс. Далее хирург изучает данный график (например, сопоставляя время на графике с видеозаписью операции).
Заявляемое устройство поясняется примерами.
Пример 1.
Применение заявляемого устройства для определения усилия необходимого для разделения межтканевых перемычек после работы фемтосекундного лазера с различным диапазоном энергии (от 120 до 160 нДж с шагом в 10 нДж) в коррекции миопии по технологии SMILE в эксперименте (на кадаверных глазах).
Оценивалась сила необходимая для разделения межтканевых перемычек после работы фемтосекундного лазера в коррекции миопии по технологии SMILE. 5 уровней энергии фемтосекундного лазера от 120 до 160 нДж с диапазоном шага в 10 нДж по 5 опытов в каждой из исследуемой групп. Для стандартизации опытов в протокол операции введены единые диагностические данные: сферический показатель: -4,25 дптр, цилиндрический показатель: -0,75 дптр, ось: 16 град., радиус роговицы: 7,9 мм, К среднее: 42,72 дптр, толщина роговицы: 593 мкм. Данные процедуры: размер treatment pack - S; данные клапана: диаметр 7,9 мм, толщина 120 мкм, угол краевого надреза 90 град., положение рассечения 35 и 145 град., угол рассечения 36 град., ширина рассечения 2,50 мм. Данные лентикулы: оптическая зона 6,5 мм, переходная зона 0,10 мм, толщина минимальная 20 мкм, толщина максимальная 100 мкм, угол краевого надреза 90 град., коррекция рефракции: сферический показатель: -4,25 дптр, цилиндрический показатель: -0,75 дптр, ось: 16 град. Данные экспертного режима фемтосекундного лазера: режим сканирования: лентикула - single, клапан - single, направление сканирования: лентикула -spiral in, клапан - spiral out, энергия 120-160 нДж, путевое расстояние для лентикулы, края лентикулы, клапана - 4,5 мкм, путевое расстояние для края клапана - 2,0 мкм, точечное расстояние для лентикулы, клапана - 4,5 мкм, точечное расстояние для края лентикулы и края клапана - 2,0 мкм.
Стандартная техника операции SMILE включает в себя процесс докинга (стыковки), работу фемтосекундного лазера (ФСЛ), иссечение и удаление роговичной лентикулы. Лентикула отсепаровывается от окружающей стромы путем иссечения через маленький боковой разрез, первоначально передняя поверхность, далее задняя.
На этапе иссечения роговичной лентикулы производили замеры показателей усилия необходимого для разделения межтканевых перемычек в роговичной ткани.
В таблице представлены средние значения и стандартные отклонения усилий необходимыхо для разделения межтканевых перемычек после работы фемтосекундного лазера (значения преобразованы в Ньютоны) для каждой энергии отдельно.

Как видно из таблицы применение высоких показателей энергии фемтосекундного лазера сопровождалось более легким разделением межтканевых перемычек: применение энергии 160 нДж сопровождалось усилием в 0,678±0,05 Н, по мере снижения энергетических параметров отмечалось увеличение силы для разделения тканей: 120 нДж соответствовали 2,370±0,08 Н.
Результаты статистической обработки исследуемых групп представлены в таблице 2.

Как видно из таблицы, значимо по силе различались энергии 120 нДж и 150 нДж (р=0,0127), 120 нДж и 160 нДж (р=0,00017) и 130 нДж и 160 нДж (р=0,0127), остальные энергии не отличались по силе необходимой для рассечения межтканевых перемычек после работы фемтосекундного лазера.
На фиг. 10 и 11 представлены графические изображения силы разделения межтканевых перемычек, выводимые на экран во время операции. Причем на фиг. 10 приведена иллюстрация силы разделения при следующих параметрах: Энергия фемтосекундного лазера 160 нДж, графическое изображение силы (обработанный в Ньютонах) необходимой для механического разделения межтканевых перемычек в роговице после SMILE (кадаверный глаз). На фиг. 11 приведена иллюстрация силы разделения при следующих параметрах: энергия фемтосекундного лазера 120 нДж, графическое изображение силы необходимой для механического разделения межтканевых перемычек в роговице после SMILE (кадаверный глаз).
Использование более низких энергий фемтосекундного лазера характеризуется увеличением силы необходимой для разделения межтканевых перемычек.
Проведенный эксперимент иллюстрирует возможность использования заявляемой насадки для измерения усилия при работе с хирургическим инструментом.
Пример 2.
Заявляемое устройство, в котором в качестве хирургического инструмента использован офтальмологический шпатель было использовано при моделировании лазерной коррекции зрения по технологии SMILE. При этом блок обработки информации был предварительно подключен к компьютеру и с помощью специального программного обеспечения была обеспечена трансляция изображения с уровнем усилия в Н на мониторе, расположенном в поле зрения офтальмохирурга и ассистента.
Операция в эксперименте включала в себя следующие этапы:
1. этап докинга (стыковки);
2. этап работы фемтосекундного лазера;
3. этап иссечения роговичной лентикулы;
4. этап удаления роговичной лентикулы.
Заявляемое устройство использовалось на этапе 3, в ходе которого осуществляли рассечение межтканевых перемычек роговичной ткани после работы фемтосекундного лазера. При данной манипуляции предпочтительно, чтобы усилие хирурга было в диапазоне 1,13-1,91 Н. При проведении операции ассистент следил за уровнем усилия и должен был сообщать при приближении значения усилия к границам допустимого диапазона. Однако при осуществлении всех манипуляций значения были в пределах 1,67±0,06 Н. нДж. Эксперимент проведен успешно и его результаты демонстрируют возможность применения заявляемого устройства в клинической практике.
При этом особенно актуальным может быть применение в клинической практике устройства с встроенной индикацией.
Список литературы
1. Гуськов A.M. Очувствление хирургического инструмента для внутрисосудистых манипуляций. Наука и образование, 2009, URL: http://technomag.edu.ru/pdf/134636.html?_s=1.
2. Хирургическое устройство для использования хирургом в ходе офтальмологической хирургической процедуры (варианты): патент RU 2682485, Российская Федерация, заявка RU 2016147683, заявл. 29.01.2015, опубл. 19.03.2019.
3. Оценка усилия на роботохирургическом инструменте: патент RU 2721462, Российская Федерация, заявка RU 2019143616, заявл. 25.12.2019, опубл. 19.05.2020.



Изобретение относится к медицинской технике, а именно к насадке на хирургический инструмент для измерения усилия для разрыва биологической ткани. Насадка включает крепление на хирургический инструмент, датчики, модуль обработки информации, блок обработки информации. Крепление соединено с датчиками и модулем обработки информации, связанным с датчиками. При этом в качестве датчиков используют резистивные тонкопленочные датчики давления с гибкими чувствительными к силе резисторами. Крепление на хирургический инструмент выполнено из оправки, дополнительной оправки и оболочки крепления. Оправка выполнена в виде втулки с возможностью жесткого закрепления на хирургическом инструменте. Дополнительная оправка включает основу и четыре ножки, расположенные на равном расстоянии друг от друга и предназначенные для сопряжения с участками оправки, на которых расположены датчики. Оболочка крепления содержит полость для выступающих из оправки участков хирургического инструмента, два канала для проводов, полость для помещения оправки и дополнительной оправки таким образом, что обеспечивается фиксация дополнительной оправки между оболочкой крепления и оправкой. Резистивные тонкопленочные датчики давления с гибкими чувствительными к силе резисторами прикреплены к оправке в участках, сопряженных с ножками дополнительной оправки с возможностью радиального расположения по отношению к оси хирургического инструмента. Датчики и модуль обработки информации связаны между собой с помощью проводов, проведенных через каналы в оболочке крепления. Обеспечивается повышение точности измерения усилия для разрыва биологической ткани на хирургическом инструменте за счет использовании насадки на хирургический инструмент с четырьмя тонкопленочными датчиками давления с гибкими чувствительными к силе резисторами, расположенными радиально по отношению к оси хирургического инструмента, возможность крепления насадки к хирургическим инструментам. 11 ил., 2 табл.
Насадка на хирургический инструмент для измерения усилия для разрыва биологической ткани, включающая крепление на хирургический инструмент, соединенные с ним датчики и модуль обработки информации, связанный с датчиками, отличающаяся тем, что в качестве датчиков используют резистивные тонкопленочные датчики давления с гибкими чувствительными к силе резисторами, при этом крепление на хирургический инструмент выполнено из оправки, дополнительной оправки и оболочки крепления, при этом оправка выполнена в виде втулки с возможностью жесткого закрепления на хирургическом инструменте, дополнительная оправка включает основу и четыре ножки, расположенные на равном расстоянии друг от друга и предназначенные для сопряжения с участками оправки, на которых расположены датчики, оболочка крепления содержит полость для выступающих из оправки участков хирургического инструмента, два канала для проводов, полость для помещения оправки и дополнительной оправки таким образом, что обеспечивается фиксация дополнительной оправки между оболочкой крепления и оправкой; резистивные тонкопленочные датчики давления с гибкими чувствительными к силе резисторами прикреплены к оправке в участках, сопряженных с ножками дополнительной оправки с возможностью радиального расположения по отношению к оси хирургического инструмента; насадка содержит блок обработки информации, связанный с датчиками и креплением, при этом датчики и модуль обработки информации связаны между собой с помощью проводов, проведенных через каналы в оболочке крепления.
| RU 2008131943 A, 10.02.2010 | |||
| US 2014113828 A1, 24.04.2014 | |||
| US 2020135056 A1, 30.04.2020 | |||
| US 2016030240 A1, 04.02.2016 | |||
| US 2015037775 A1, 05.02.2015 | |||
| US 2019350757 A1, 21.11.2019 | |||
| CN 106535809 B, 03.03.2020. |

