ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к системам посадки по приборам для летательных аппаратов. В частности, настоящее изобретение относится к решеткам глиссады и курсового радиомаяка ILS.
УРОВЕНЬ ТЕХНИКИ
[0001] Существует потребность в улучшенных системах точного захода на посадку и посадки, которые генерируют сигнал системы посадки по приборам (instrument landing system, ILS) в пространстве и удовлетворяют дополнительным требованиям, характерным для различных ожидаемых задач.
[0002] При внедрении для правительства США система ILS должна быть установлена и работать в окружающей среде, в которой отсутствует GPS, должна выдавать сигналы курсового радиомаяка и глиссады ILS в пространстве, которые соответствуют требованиям Приложения 10 ИКАО для ILS категории I, и должна быть способна успешно завершить полетную инспекцию в соответствии с Руководством по полетной инспекции США, Приказом FAA 8200.1. Также необходимо, чтобы система была транспортабельной, например, чтобы ее можно было перевозить на одном поддоне объемом 463 л посредством самых разных воздушных, наземных и морских транспортных средств. Также необходимо, чтобы установку системы могли выполнить 2 человека за 2 человеко-часа (до 6 человеко-часов с громоздкой одеждой) в суровых условиях по всему миру.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0003] В соответствии с вариантами осуществления настоящего раскрытия описывается система посадки по приборам (ILS). ILS содержит множество антенн и множество антенных радиоблоков (antenna radio unit, ARU). Каждый ARU из множества ARU выполнен с возможностью работы для генерирования модулированного РЧ-сигнала, подаваемого на отличающуюся антенну из множества антенн для передачи. ILS также содержит центральный блок обработки, который выполнен с возможностью работы для управления блоками ARU для регулировки синхронизации между модулированными РЧ-сигналами, подаваемыми блоками ARU на множество антенн для передачи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0004] Аспекты настоящего раскрытия проиллюстрированы в качестве примера и не ограничены прилагаемыми чертежами.
[0005] Фиг. 1 иллюстрирует традиционную архитектуру системы ILS в соответствии с некоторыми вариантами осуществления.
[0006] Фиг. 2 иллюстрирует архитектуру портативной системы посадки по приборам, которая выполнена в соответствии с некоторыми вариантами осуществления.
[0007] Фиг. 3 иллюстрирует две несущие в идеальном пространстве сигналов в соответствии с некоторыми вариантами осуществления.
[0008] Фиг. 4 иллюстрирует приведенную для примера архитектуру, выполненную в соответствии с некоторыми вариантами осуществления.
[0009] Фиг. 5 иллюстрирует картину, когда два кабеля отличаются на 1 см в соответствии с некоторыми вариантами осуществления.
[0010] Фиг. 6 иллюстрирует приведенную для примера блочную схему с соответствующими операциями для реализации системы в соответствии с некоторыми вариантами осуществления.
[0011] Фиг. 7 иллюстрирует временную диаграмму в соответствии с некоторыми вариантами осуществления.
[0012] Фиг. 8 иллюстрирует приведенную для примера работу архитектуры в соответствии с некоторыми вариантами осуществления.
[0013] Фиг. 9 иллюстрирует пример измерения, которое показывает типичное поведение обычного кабеля в соответствии с некоторыми вариантами осуществления.
[0014] Фиг. 10 иллюстрирует приведенную для примера работу синхронизации модуляции в соответствии с некоторыми вариантами осуществления.
[0015] Фиг. 11 иллюстрирует график, который показывает синхронность модуляции в соответствии с некоторыми вариантами осуществления.
[0016] Фиг. 12 иллюстрирует два передатчика DVOR, выполненные в соответствии с некоторыми вариантами осуществления.
[0017] Фиг. 13 иллюстрирует антенну Вивальди, выполненную в соответствии с некоторыми вариантами осуществления.
[0018] Фиг. 14 иллюстрирует логопериодическую дипольную антенну (LPD), выполненную в соответствии с некоторыми вариантами осуществления.
[0019] Фиг. 15 иллюстрирует конфигурацию четырехэлементной горизонтальной решетки антенны глиссады в соответствии с некоторыми вариантами осуществления.
[0020] Фиг. 16 иллюстрирует зависимость DDM (Depth of Modulation, глубины модуляции) от угла возвышения для четырехэлементной горизонтальной решетки в соответствии с некоторыми вариантами осуществления.
[0021] Фиг. 17 иллюстрирует графики зависимости мощности сигналов CSB (carrier plus sideband, несущей плюс боковой полосы) и SBO (sideband only, только боковой полосы) от угла возвышения для горизонтальной решетки в соответствии с некоторыми вариантами осуществления.
[0022] Фиг. 18 иллюстрирует зависимость фазы сигналов CSB и SBO от угла возвышения в соответствии с некоторыми вариантами осуществления.
[0023] Фиг. 19 иллюстрирует конфигурацию двухэлементной горизонтальной решетки антенны глиссады в соответствии с некоторыми вариантами осуществления.
[0024] Фиг. 20 иллюстрирует вид сбоку варианта осуществления обычной нулевой эталонной решетки с поперечным сечением в виде конуса в соответствии с некоторыми вариантами осуществления.
[0025] Фиг. 21 иллюстрирует вид сбоку поперечного сечения поверхности горизонтальной решетки глиссады в соответствии с некоторыми вариантами осуществления.
[0026] Фиг. 22 иллюстрирует поперечное сечение в виде конуса, если смотреть из летательного аппарата на траектории захода на посадку, в соответствии с некоторыми вариантами осуществления.
[0027] Фиг. 23 иллюстрирует конфигурацию десятиэлементной горизонтальной решетки антенны глиссады в соответствии с некоторыми вариантами осуществления.
[0028] Фиг. 24 иллюстрирует поперечные сечения глиссады отдельной пары в соответствии с некоторыми вариантами осуществления.
[0029] Фиг. 25 иллюстрирует DDM при угле возвышения 3° как функцию угла азимута для решетки в соответствии с некоторыми вариантами осуществления.
[0030] Фиг. 26 иллюстрирует DDM десятиэлементной горизонтальной решетки глиссады в зависимости от угла возвышения в соответствии с некоторыми вариантами осуществления.
[0031] Фиг. 27 иллюстрирует DDM с клиренсом в зависимости от угла азимута в соответствии с некоторыми вариантами осуществления.
[0032] Фиг. 28 иллюстрирует DDM с клиренсом в зависимости от расстояния до точки приземления в соответствии с некоторыми вариантами осуществления.
[0033] Фиг. 29 иллюстрирует монтажную конструкцию горизонтальной решетки в соответствии с некоторыми вариантами осуществления.
[0034] Фиг. 30 иллюстрирует график мощности сигналов CSB и SBO в зависимости от угла возвышения для вертикальной решетки без изображения в соответствии с некоторыми вариантами осуществления.
[0035] Фиг. 31 иллюстрирует график зависимости фазы сигналов CSB и SBO от угла возвышения для вертикальной решетки без изображения в соответствии с некоторыми вариантами осуществления.
[0036] Фиг. 32 иллюстрирует конфигурацию вертикальной решетки глиссады без формирования изображения в соответствии с некоторыми вариантами осуществления.
[0037] Фиг. 33 иллюстрирует зависимость DDM вертикальной решетки глиссады без формирования изображения от угла возвышения в соответствии с некоторыми вариантами осуществления.
[0038] Фиг. 34 иллюстрирует монтажную конструкцию вертикальной решетки в соответствии с некоторыми вариантами осуществления.
[0039] Фиг. 35 иллюстрирует антенну решетки курсового радиомаяка с элементами и опорной конструкцией в соответствии с некоторыми вариантами осуществления.
[0040] Фиг. 36 иллюстрирует коэффициент усиления сигналов CSB и SBO курсового радиомаяка в зависимости от угла азимута в соответствии с некоторыми вариантами осуществления.
[0041] Фиг. 37 иллюстрирует зависимость DDM курсового радиомаяка от угла азимута в соответствии с некоторыми вариантами осуществления.
[0042] Фиг. 38 иллюстрирует эффекты долговременной ошибки положения антенны горизонтальной решетки в соответствии с некоторыми вариантами осуществления.
[0043] Фиг. 39 иллюстрирует эффекты долговременной ошибки амплитуды горизонтальной решетки в соответствии с некоторыми вариантами осуществления.
[0044] Фиг. 40 иллюстрирует эффекты долговременной ошибки фазы горизонтальной решетки в соответствии с некоторыми вариантами осуществления.
[0045] Фиг. 41 иллюстрирует эффекты комбинированной долговременной ошибки горизонтальной решетки в соответствии с некоторыми вариантами осуществления.
[0046] Фиг. 42 иллюстрирует эффекты комбинированной кратковременной ошибки горизонтальной решетки в соответствии с некоторыми вариантами осуществления.
[0047] Фиг. 43 иллюстрирует эффекты долговременной ошибки положения вертикальной решетки антенны в соответствии с некоторыми вариантами осуществления.
[0048] Фиг. 44 иллюстрирует эффекты долговременной ошибки амплитуды вертикальной решетки в соответствии с некоторыми вариантами осуществления.
[0049] Фиг. 45 иллюстрирует эффекты долговременной ошибки фазы вертикальной решетки в соответствии с некоторыми вариантами осуществления.
[0050] Фиг. 46 иллюстрирует эффекты комбинированной долговременной ошибки вертикальной решетки в соответствии с некоторыми вариантами осуществления.
[0051] Фиг. 47 иллюстрирует эффекты комбинированной кратковременной ошибки вертикальной решетки в соответствии с некоторыми вариантами осуществления.
[0052] Фиг. 48 иллюстрирует эффекты горизонтальной решетки при неровности земли в соответствии с некоторыми вариантами осуществления.
[0053] Фиг. 49A-D иллюстрируют эффекты вертикальной решетки при неровности земли в соответствии с некоторыми вариантами осуществления.
[0054] Фиг. 50 иллюстрирует области отражения для горизонтальной решетки в соответствии с некоторыми вариантами осуществления.
[0055] Фиг. 51 иллюстрирует области отражения для вертикальной решетки в соответствии с некоторыми вариантами осуществления.
[0056] Фиг. 52 иллюстрирует традиционную систему курсового радиомаяка и систему курсового радиомаяка PILS, достигающую эквивалентной интенсивности поля в соответствии с некоторыми вариантами осуществления.
[0057] Фиг. 53 представляет собой график диаграммы сигнала CSB курсового радиомаяка с 8 элементами, иллюстрирующий изменение амплитуды в зависимости от угла азимута в соответствии с некоторыми вариантами осуществления.
[0058] Фиг. 54 показывает конфигурацию традиционной системы и горизонтальной системы PILS в соответствии с некоторыми вариантами осуществления.
[0059] Фиг. 55 представляет собой график, иллюстрирующий диаграмму сигнала CSB глиссады в соответствии с некоторыми вариантами осуществления.
[0060] Фиг. 56 иллюстрирует традиционную систему, горизонтальную систему PILS согласно некоторым вариантам осуществления и вертикальную систему PILS согласно некоторым вариантам осуществления.
[0061] Фиг. 57 иллюстрирует вертикальную систему глиссады PILS в соответствии с некоторыми вариантами осуществления.
[0062] Фиг. 58 иллюстрирует регулировку ошибки положения горизонтальной решетки в соответствии с некоторыми вариантами осуществления.
[0063] Фиг. 59 иллюстрирует регулировку ошибки для сигналов, приходящих от двух горизонтальных решеток глиссады и поступающих в приемник в противофазе, в соответствии с некоторыми вариантами осуществления.
[0064] Фиг. 60 иллюстрирует зависимость DDM горизонтальной решетки глиссады от угла возвышения без ошибок в соответствии с некоторыми вариантами осуществления.
[0065] Фиг. 61 иллюстрирует зависимость DDM горизонтальной решетки глиссады от угла возвышения с ошибкой в 10 см в соответствии с некоторыми вариантами осуществления.
[0066] Фиг. 62 иллюстрирует DDM горизонтальной решетки глиссады в соответствии с некоторыми вариантами осуществления.
[0067] Фиг. 63 иллюстрирует DDM горизонтальной решетки глиссады в соответствии с некоторыми вариантами осуществления.
[0068] Фиг. 64 иллюстрирует эффект ошибки положения антенны передней группы по отношению к задней группе в см в соответствии с некоторыми вариантами осуществления.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0069] Настоящее изобретение будет описано более полно ниже со ссылкой на прилагаемые чертежи, на которых показаны примеры вариантов осуществления изобретения. Однако принципы изобретения могут быть воплощены во многих различных формах и не должны рассматриваться как ограниченные вариантами осуществления, изложенными в настоящем описании. Скорее, эти варианты осуществления предоставлены для того, чтобы раскрытие изобретения было исчерпывающим и полным, а также полностью передавало объем различных принципов настоящего изобретения специалистам в данной области техники. Следует также отметить, что эти варианты осуществления не являются взаимоисключающими. Можно неявно предположить, что компоненты из одного варианта осуществления присутствуют/используются в другом варианте осуществления.
[0070] Некоторые варианты осуществления настоящего раскрытия направлены на решение потенциальных проблем синхронизации, которые могут возникать в архитектурах ILS. Фактически, в то время как в традиционной системе один передатчик генерирует модулированный РЧ-сигнал, который затем распределяется на все антенны через пассивную сеть, в распределенной системе, согласно некоторым представленным в настоящее время вариантам осуществления, сигнал, излучаемый каждой антенной, генерируется выделенным активным передатчиком.
[0071] Фиг. 1 иллюстрирует традиционную архитектуру системы ILS. На фиг. 2 показана архитектура портативной системы посадки по приборам (PILS), которая выполнена в соответствии с некоторыми вариантами осуществления настоящего изобретения.
[0072] Ссылаясь на фиг. 2, надлежащая синхронизация между передатчиками (называемыми «ARU», антенный радиоблок), координируемая общим центральным блоком (CU), необходима для гарантии когерентности составного сигнала в пространстве. В некоторых вариантах осуществления центральный блок содержит схему обработки или процессор для выполнения описанных здесь операций. Дополнительные примеры и варианты осуществления, касающиеся аппаратных и/или программных реализаций центрального блока, также описаны ниже.
[0073] Проблема является общей для курсового радиомаяка и глиссады (в этом документе она описана для глиссады, для которой она является наиболее критичной) и может быть разделена на следующие три группы:
1) Синхронизация несущей частоты и фазы (например, 330 МГц): все антенны работают для передачи одной и той же несущей частоты и фазы.
• В традиционной системе, показанной на фиг. 1, присутствует только один РЧ-генератор, а равенство фаз РЧ между антеннами гарантируется допусками блока распределения и надлежащей калибровкой РЧ-кабелей.
• Вместо этого в архитектуре PILS, показанной на фиг. 2, каждый ARU имеет собственный локальный генератор. Центральный блок должен широковещательно передавать сигнал опорного генератора на все ARU, чтобы они принимали общий сигнал, по которому они бы синхронизировали свой собственный локальный РЧ-генератор. Затем, поскольку каждый передатчик способен корректировать любую фазу РЧ, равенство РЧ-фаз кабелей не требуется, но центральный блок должен выполнить адекватное измерение различных задержек кабеля.
2) Синхронизация модуляций (например, Морзе, 90 Гц, 150 Гц, 1020 Гц, 8 кГц): все антенны работают для передачи сигнала модуляции с одинаковой частотой и фазой.
• В традиционной системе, показанной на фиг. 1, сигналы модуляции генерируются общим передатчиком.
• В архитектуре PILS на фиг. 2 эта проблема теоретически аналогична двум предыдущим, с тем упрощением, что сигналы медленнее (и на них не влияют длины кабелей), но сложностью в том, что их много, поэтому их необходимо мультиплексировать и демультиплексировать.
3) Синхронизация приемника (например, проблема безопасности): сбой в результате любой из двух предыдущих проблем должен быть обнаружен центральным блоком.
• В традиционной системе на фиг. 1 эта проблема практически отсутствует, так как блок контроля в основном один.
• В архитектуре PILS, показанной на фиг. 2, вместо этого блок контроля центрального блока оценивает сигнал в пространстве путем обработки числовых значений, вычисленных цифровыми приемниками, размещенными в каждом ARU. Эти значения надежны только в том случае, если схемы синхронизации не выходят из строя, следовательно, схемы синхронизации, используемые каждым передатчиком ARU, должны быть независимы от схем синхронизации, используемых приемником ARU. В архитектуре PILS различных вариантов осуществления настоящего изобретения секция ТХ и секция RX каждого ARU могут работать как независимые блоки, поэтому N в два раза больше количества антенн (и ARU).
[0074] Соответствующие варианты осуществления направлены на ILS, которая включает множество антенн, множество блоков ARU, каждый из которых выполнен с возможностью работы для генерирования модулированного РЧ-сигнала, подаваемого на отличающуюся антенну из множества антенн для передачи. ILS также включает центральный блок, который выполнен с возможностью работы для управления блоками ARU для регулировки синхронизации между модулированными РЧ-сигналами, подаваемыми блоками ARU на множество антенн для передачи.
[0075] В одном варианте осуществления центральный блок выполнен с возможностью работы для управления блоками ARU для регулировки синхронизации несущей частоты и фазы между модулированными РЧ-сигналами, подаваемыми блоками ARU на множество антенн для передачи. Как будет объяснено более подробно ниже, может быть особенно выгодно, чтобы центральный блок был выполнен с возможностью работы для управления блоками ARU для регулировки синхронизации разброса фазы несущей таким образом, чтобы разброс между модулированными РЧ-сигналами, подаваемыми блоками ARU на множество антенн для передачи, не превышал порогового значения ухода РЧ, такого как, но не ограничиваясь этим, порог ухода РЧ в 1°, в соответствии с одним вариантом осуществления.
[0076] В другом варианте осуществления каждый из блоков ARU напрямую подключен только к одной антенне из множества антенн для подачи одного из модулированных РЧ-сигналов только одной из множества антенн для передачи. Каждый из блоков ARU может включать локальную схему РЧ-генератора, которая выполнена с возможностью фазовой синхронизации с сигналом опорного генератора, обеспечиваемым центральным блоком. Центральный блок может быть подключен через множество кабелей, каждый из которых подключен к отличающемуся блоку ARU из множества блоков ARU для подачи сигналов через кабели для блоков ARU для генерирования модулированных РЧ-сигналов, и центральный блок может быть выполнен с возможностью работы для измерения задержек сигналов в кабелях между центральным блоком и каждым ARU, и с возможностью регулировки синхронизации между модулированными РЧ-сигналами, подаваемыми блоками ARU на множество антенн для передачи, на основе измерений задержек сигналов в кабелях. Задержки сигналов в кабелях могут быть измерены на основе сравнения фаз между сигналом опорного генератора и сигналами каждой локальной схемы РЧ-генератора.
[0077] В другом варианте осуществления каждый ARU включает схему передатчика, схему синхронизации передатчика, схему приемника и схему синхронизации приемника. Схема передатчика выполнена с возможностью передачи модулированного РЧ-сигнала. Схема синхронизации передатчика выполнена с возможностью работы для управления синхронизацией модулированного РЧ-сигнала, переданного схемой передатчика. Схема приемника выполнена с возможностью приема модулированного РЧ-сигнала. Схема синхронизации приемника выполнена с возможностью работы для управления синхронизацией модулированного РЧ-сигнала, принятого схемой приемника. В дополнительном варианте осуществления центральный блок выполнен с возможностью регулировки синхронизации несущей частоты и фазы между схемами передатчика в каждом ARU.
[0078] РАЗРАБОТКА КОНЦЕПЦИИ
[0079] Ниже приводится описание разработки концепции PILS (также называемой «новой системой») в соответствии с некоторыми вариантами осуществления.
[0080] ARU может генерировать сигналы в соответствии со следующим математическим описанием.
[0081] Идеальный сигнал в пространстве (V) состоит из двух несущих (CRS и CLR (clearance), например, как показано на фиг. 3), сдвинутых приблизительно на +4 кГц и -4 кГц (fs) от центральной частоты fθ (330 МГц), каждая из которых модулирована по амплитуде на 80% двумя непрерывными тонами 90 Гц и 150 Гц с разницей модуляции DDM в зависимости от угла возвышения приемника:
V(t, θ)=V(θ)*cos
[2π(f0-fS)t]*
[1+(0,4-DDM(θ)/2)*cos(2π*90*t)+(0,4+DDM(θ)/2)*cos(2π*150*t)]+(клиренс, отцентрованный на f0+fS)
[0082] Фиг. 3 иллюстрирует две несущие (CRS и CLR) в идеальном пространстве сигналов в соответствии с некоторыми вариантами осуществления. Только для системы курсового радиомаяка каждая несущая также модулируется по амплитуде тоном 1020 Гц, кодируемым кодом Морзе (импульсы которого имеют длительность в доли секунд):
ID(t)=cos(2π*1024*t)* Морзе(t)
[0083] Этот сигнал в пространстве vARU-i достигается за счет подачи на каждую антенну (i) подобных сигналов, которые отличаются РЧ-амплитудой, РЧ-фазой ψi, глубиной модуляции тона и фазой ψisbo, и имеют другие общие характеристики, такие как несущая частота, частота модуляции и код Морзе:
VARU-i (t)=Vi*cos
[2π(f0-fS)t+ψi]*
[1+(0.4+Ai)*cos(2π*f90*t+ψisbo)±(0.4+Ai)*cos(2π*f150*t+ψisbo)]+(+клиренс, отцентрованный на f0+fS)
[0084] В принципе, в то время как коэффициенты с индексом i изменяются для каждой антенны и, следовательно, для каждого ARU (Vi, ψi, Ai, ψisbo как для CRS, так и для CLR), синхронизация состоит в том, чтобы гарантировать, что все общие частоты будут по возможности более идентичны друг другу и будут излучаться по возможности в один и тот же момент времени (фаза) в соответствии с некоторыми вариантами осуществления.

[0085] В одном варианте осуществления, чтобы новая система глиссады гарантировала стабильный угол снижения, допустимый статический разброс фазы радиочастотных несущих должен быть меньше 1°. Это требование является результатом моделирования, выполненного на новой решетке GP без изображения, которое показало, что уход РЧ на 1° между двумя передатчиками антенны может привести к уходу DDM приблизительно на 0,5%, что соответствует уходу угла глиссады на 0,02°, что является приемлемым. Поскольку уход на 0,03° является типичным шумом для угла GP, испытываемым текущей системой в реальной окружающей среде, при проектировании новой системы была определена консервативная задача 0,02° из-за идеальной окружающей среды систем моделирования. С другой стороны, в существующей системе с изображением уход РЧ-фазы даже на 5° на антеннах не влияет на угол GP.
[0086] Поэтому, в соответствии с приведенной выше таблицей 1, этот предел требований переводится в допустимое отклонение по времени. Просто для сравнения и ссылки также указан 1° для других частот.
[0087] Из таблицы 1 видно, что первый элемент (синхронизация несущей) требует особого внимания по отношению к другим элементам (синхронизация модуляции). Требование 8 пс является сложной задачей (особенно из-за длины кабеля более 50 м). Это требование должно быть гарантировано в среднесрочной и долгосрочной перспективе (иначе возникнет нестабильный угол снижения), в то время как в краткосрочной перспективе (диапазон мс) это требование может быть консервативным. Очень кратковременный уход фазы (высокочастотное дрожание фазы) не имеет значения, поскольку сигналы модулируются по амплитуде.
[0088] ОПИСАНИЕ РЕШЕНИЯ
[0089] Ниже описываются различные дополнительные варианты осуществления в контексте того, как может быть реализована система PILS.
[0090] Описание сигнала и выведение вариантов решения.
[0091] Каждый передатчик ARU представляет собой автономный программно-определяемый радиоблок, способный генерировать модулированный радиочастотный сигнал с программируемой несущей частотой и с программируемыми конфигурационными значениями (например, с по меньшей мере одними из следующих конфигурационных значений: РЧ-мощность, РЧ-фаза, глубины модуляции и фазы). Требования к частоте, формам волны и стабильности сигнала VOR очень близки к требованиям ILS, поэтому реализация элементарной системы курсового радиомаяка ILS с 4 антеннами с использованием физической платформы DVOR, создающей сигнал курсового радиомаяка в пространстве, может быть относительно недорогой и простой. Таким образом, доказывается точность частоты и фазы SDR, в то время как была изучена только синхронизация между различными ARU.
[0092] Решения, представленные в следующих абзацах, ориентированы на конструкцию системы, независимую от длин кабелей и полевых калибровок.
[0093] Звездообразное распределение общего сигнала синхронизации.
[0094] В некоторых вариантах осуществления каждый ARU будет иметь одинаковую среднюю радиочастоту, если каждый локальный генератор (детерминированное дробное умножение несущей частоты) синхронизирован с общим кварцевым генератором с температурной компенсацией, ТСХО, (Temperature Compensated Crystal Oscillator), широковещательно передаваемым центральным блоком. Фиг. 4 иллюстрирует приведенную для примера архитектуру, выполненную в соответствии с некоторыми вариантами осуществления. ТСХО может быть сигналом, генерируемым кварцевым генератором с температурной компенсацией.
[0095] Таким образом, в одном варианте осуществления каждый ARU включает локальную схему РЧ-генератора, которая выполнена с возможностью работы для вывода сигнала детерминированного дробного умножения несущей частоты, который синхронизирован с общим широковещательно передаваемым центральным блоком обработки сигналом ТСХО.
[0096] Согласно фиг.4, архитектура может гарантировать синхронизацию несущей частоты, но не синхронизацию РЧ-фазы, поскольку требование 10 пс может быть достигнуто только в том случае, если 20 кабелей имеют одинаковую длину с точностью 1 мм при общей длине 60 м или 80 м (с учетом двух исследуемых вариантов горизонтальной GP). На фиг. 5 показано, что происходит в случае, когда два кабеля отличаются всего на 1 см (что неприемлемо для соблюдения нашего предела сдвига фаз в 1°).
[0097] Тем не менее, некоторые варианты осуществления позволяют измерять РЧ-смещение каждого кабеля, поэтому цифровой передатчик, связанный с этим кабелем, может вычитать это значение из номинальной РЧ-фазы на порту антенны (необходимой для формирования диаграммы направленности) так, чтобы сигналы в антеннах были в фазе.
[0098] Центральному блоку необходимо измерение задержки кабелей. Абсолютное значение задержки кабеля (и передатчика) не требуется, поскольку только разница между всеми кабелями (и между блоками ARU) является определяющей для формирования луча фазированной решетки. После отказа от других решений, таких как измерение длины кабеля при установке или внедрение непрерывного измерения, предлагается решение, основанное на мультиплексировании с временным разделением.
[0099] Локальный РЧ-генератор ARU возбуждается внутренним ТСХО (см. фиг. 6 и 8), который управляется контуром фазовой автоподстройки (phase locked loop, PLL), синхронизированным с сигналом синхронизации, широковещательно передаваемым центральным блоком (central unit, CU) и генерируемым его внутренним ТСХО.
[00100] Периодически (например, каждую секунду) CU останавливает передачу ТСХО только к одному ARU на очень короткий временной промежуток (например, несколько миллисекунд), в течение которого локальный ТСХО ARU переводится в состояние удержания (PLL переводится в состояние удержания). В течение этого временного промежутка (в это время сигнал, генерируемый этим ARU, должен быть достаточно стабильным, как показано ниже), CU может измерить разность фаз между своим сигналом ТСХО и сигналом ТХСО ARU, отправленным обратно по тому же кабелю.
[00101] Соответственно, в одном варианте осуществления каждый ARU включает локальную схему РЧ-генератора, которая возбуждается встроенным в каждый ARU ТСХО, который управляется PLL, синхронизированным с сигналом синхронизации, широковещательно передаваемым центральным блоком от встроенного в центральный блок ТСХО. Периодически центральный блок останавливает ТСХО одного ARU на определенный промежуток времени, в течение которого ТСХО этого одного ARU переводится в состояние удержания, и пока ТСХО этого одного ARU находится в состоянии удержания центральный блок работает для измерения разности фаз между сигналом встроенного в центральный блок ТСХО и сигналом встроенного в этот один ARU ТСХО, отправленным по кабелю в центральный блок.
[00102] Фиг. 6 иллюстрирует приведенную для примера блочную диаграмму с соответствующими схемами и операциями для реализации этой системы в соответствии с некоторыми вариантами осуществления. В системе на фиг. 6 схема и операции включают синхронизацию в течение временного интервала «tGO» (приблизительно 990 мс каждую секунду) локального ТСХО ARU с ведущим ТСХО CU. Управляют локальной частотой. В течение временного интервала «tRET» (приблизительно 10 мс каждую секунду) переводят локальный ТСХО каждого ARU в состояние удержания, и CU измеряет сигнал локального ARU, задержанный (два раза) кабелем. Перестают управлять локальной частотой. Каждую секунду CU обновляет каждый ARU новой измеренной задержкой фазы Δψ/2 вместе с другими конфигурационными значениями (мощность, индекс модуляции). Синхронности низкой скорости (тоны модуляции, ID и т.д.) широковещательно передаются по тем же кабелям (как показано ниже). На фиг. 6 «блок управления» (CU) может соответствовать «центральному блоку», описанному в настоящем документе в других местах.
[00103] В случае необходимости синхронизации 10 (ТХ)+10 (RX) ARU, возможный временной план может быть таким, как показано на временной диаграмме на фиг. 7.
[00104] Определение наиболее подходящей длительности временного промежутка имеет основополагающее значение для целостности сигнала в пространстве и является результатом компромисса между большим значением, необходимым CU для выполнения точного и стабильного измерения фазы, и небольшим значением, необходимым для предотвращения чрезмерного блуждания локального ТСХО в состоянии удержания.
[00105] К сожалению, в то время как долговременная стабильность частоты конкретизируется для коммерчески доступных ТСХО (обычно 1 ppm/год, что уже является очень хорошим значением), краткосрочный уход (ppm/c) обычно конкретизируется для более точного атомарного ТСХО (0,002 ppm/с), который не может быть использован из-за своей стоимости (1000$) и энергопотребления (5 Вт).
[00106] Грубая оценка краткосрочного ухода была выполнена посредством эксперимента путем смешивания частот, создаваемых двумя типичными идентичными ТСХО, и путем измерения ухода во времени частоты биений. Грубая оценка краткосрочной стабильности ТСХО составляет приблизительно 1 Гц на частоте 330 МГц. К сожалению, несмотря на очень хорошую стабильность (3е-9), этого недостаточно, чтобы позволить ТСХО бесконтрольно работать в течение 1 с. На самом деле, если быть осторожными, 1 Гц за 1 с приведет к сдвигу фазы, равному 360°, что далеко от нашей задачи в 1°. Поскольку Δψ=2π Δf t бесконтрольный промежуток в 10 мс будет давать 3,6°, но можно разумно предположить, что за 10 мс уход частоты намного меньше 1 Гц (значение, измеренное через 1 с). С другой стороны, временной промежуток 10 мс содержит несколько тысяч колебаний частоты 40 МГц, что позволяет CU стабильно и точно измерять сдвиг фазы (с точностью приблизительно 10 пс, т.е. 0,1°).
[00107] Контур синхронизации фазы на основе множества несущих
[00108] В некоторых вариантах осуществления каждый ARU будет реализовывать схему точной синхронизации фазы своего внутреннего тактового сигнала с использованием контура распределенной синхронизации фазы на основе различных тонов, передаваемых по соединительному коаксиальному кабелю. Этот подход работает надлежащим образом и очень точно, если скорость распространения в среде одинакова для разных выбранных частот (кабель должен быть почти не рассеивающим).
[00109] В соответствии с некоторыми вариантами осуществления, две частоты, передаваемые в ARU, обозначаются f1 и f2 и выбираются таким образом, чтобы они в сумме давали желаемую частоту fop. В ARU две частоты f1 и f2 смешиваются вместе, чтобы получить рабочую частоту fop, которая делится на два и отправляется обратно по тому же кабелю в CU. Требуемое частотное разделение и избирательность в ARU, а также в CU могут быть практически гарантированы посредством использования недорогих фильтров (фильтры на поверхностных акустических волнах (SAW) или LC-фильтры) без направленных ответвителей.
[00110] CU принимает обратно тон fop/2 и сравнивает по фазе этот сигнал со сгенерированным сигналом fop, надлежащим образом корректируя фазу одного из двух тонов, переданных в ARU (f2), реализуя, таким образом, распределенную архитектуру PLL.
[00111] Соответственно, в одном варианте осуществления каждый ARU включает локальную схему РЧ-генератора. Центральный блок подает на каждый ARU двухчастотный сигнал по кабелям, каждый из которых соответственно соединяет центральный блок с другим ARU. Центральный блок также объединяет два частотных сигнала, чтобы обеспечить сигнал рабочей частоты в центральном блоке. Каждый из ARU смешивает два частотных сигнала вместе, чтобы получить сигнал рабочей частоты, который затем делится на два для генерирования возвратных сигналов, которые передаются обратно в блок управления по соответствующему кабелю. Для каждого ARU блок управления получает возвратные сигналы от ARU, сравнивает фазу возвратных сигналов от ARU с сигналом рабочей частоты в центральном блоке и регулирует синхронизацию ARU на основе сравнения фаз.
[00112] На фиг. 8 показана приведенная для примера работа архитектуры, описанной выше. USBG и LSBG представляют собой соответственно генератор верхней боковой полосы или генератор нижней боковой полосы (сбалансированные смесители и фильтрация). В CU есть два других смесителя для надлежащей генерации тона f2 с управлением по фазе, который замыкает контур вместе с тоном обратной связи fop/2. Эту архитектуру можно синтезировать аналогичным образом с использованием FPGA или другого цифрового РЧ-решения.
[00113] Было подтверждено, что этот подход является точным с ошибкой по фазе менее 1 градуса даже для микроволновой реализации, по существу компенсируя любое изменение температуры, связанное с кабелями (т.е. длина, коэффициент распространения).
[00114] Можно показать, что в устойчивом состоянии смещения фазы кабелей компенсируются, а система нечувствительна к длине кабелей, и ошибка генерируется только в том случае, когда кабели являются дисперсионными. В некоторых реализациях частоты находятся в диапазоне сотен мегагерц, и общая полоса пропускания, используемая тремя тонами, также ограничена в этом диапазоне, поэтому дисперсия незначительна.
[00115] Фиг. 9 иллюстрирует приведенное для примера измерение, которое показывает типичное поведение обычного кабеля, такого как RG223. Ошибка дифференциальной фазы, связанная с дисперсией кабеля, находится в диапазоне нескольких тысяч градусов ниже 1 ГГц. Это величина вклада ошибки из-за дисперсии, которая может возникнуть при работе на частоте около 330 МГц.
[00116] Синхронизация модуляции
[00117] Как только несущие частоты синхронизированы с использованием одного из двух приведенных для примера подходов, в каждом ARU частота модуляции может быть легко сгенерирована как дробное отношение несущей частоты с очень высоким разрешением. Поскольку отношение является детерминированной величиной, гарантируется эквивалентность всех частот модуляции.
[00118] В качестве примера, если несущая частота составляет 332 МГц (с отклонением 1000 Гц), тоны модуляции могут быть сгенерированы следующим образом:
f90=332,000,000 (±1000)/240*298,061=90,0002 Гц (±0,002) Гц (требуется 0,01 Гц)
f150=332,000,000 (±1000)/240*496,768=150,0002 Гц (±0,003) Гц (требуется 0,01 Гц)
f1024=332,000,000 (±1000)/232*13,247=1023,99 Гц (±0,02) Гц (требуется 0,1 Гц)
fS=332,000,000 (±1000)/224*203=4017 Гц (±0,1) Гц (требуется 50 Гц)
[00119] Что касается частот модуляции, то синхронизация не является проблемой. Вместо этого, поскольку низкая частота достигается делением гораздо более высокой частоты, их фаза является проблемой, поскольку необходимо предотвратить начало низкой частоты с любого периода РЧ в каждом ARU. Фиг. 10 представляет собой график, иллюстрирующий приведенную для примера работу синхронизации модуляции.
[00120] Из-за низкой точности, требуемой для синхронизации блоков ARU во временной области модуляции (приблизительно 1 мкс), задержки в кабелях незначительны, и общая синхронность модуляции может быть широковещательно передана посредством CU на все блоки ARU без какой-либо необходимости возврата от каждого кабеля.
[00121] Прямой цифровой синтезатор (DDS) в ARU будет генерировать частоту модуляции как часть радиочастоты путем использования импульса синхронизации от CU в качестве триггера. Фиг. 11 представляет собой график, иллюстрирующий синхронность модуляции.
[00122] Синхронность модуляции может быть физически отправлена в ARU вместе с конфигурационными данными, первая грубая оценка которых составляет приблизительно 100 кбит/с, но для этой задачи она может быть увеличена до 1 Мбит/с.
[00123] Передача сигналов синхронизации
[00124] Согласно некоторым вариантам осуществления, сигналы синхронизации к удаленным блокам ARU передаются по волоконно-оптическим или медным кабелям. В одном варианте осуществления сигналы синхронизации могут распространяться в виде электрического сигнала по медному проводу. В некоторых вариантах осуществления используется один кабель для каждого соединения от CU к ARU и от ARU обратно к CU. В некоторых реализациях основной сигнал ILS передается по волоконно-оптическому соединению вместе с сигналом синхронизации по прямому пути. По обратному пути сигнал синхронизации отправляется отдельно. При такой архитектуре блоки ARU упрощаются, поскольку им не нужно будет внутренне синтезировать основной сигнал ILS. ARU или CU могут регулировать фазу основного сигнала в соответствии с контуром синхронизации.
[00125] В некоторых вариантах осуществления кабели содержат оптические волокна. В соответствии с некоторыми вариантами осуществления для снижения размеров и веса соединений могут быть использованы оптические принципы, в основном, для соединения CU и ARU оптическими волокнами. В частности, для соединения подрешеток можно использовать одно или несколько волокон, прикрепленных к одному прочному межсоединительному разъему. Центральный блок в некоторых вариантах осуществления выполнен с возможностью работы для управления блоками ARU для регулировки синхронизации между модулированными РЧ-сигналами, подаваемыми блоками ARU на множество антенн для передачи, с использованием сигналов оптической синхронизации, передаваемых по волоконно-оптическим кабелям.
[00126] В некоторых вариантах осуществления передача данных синхронизации по волоконно-оптическим или медным кабелям использует несколько несущих. В этом варианте осуществления одна из несущих множества несущих используется для возвратного пути. Возвратный путь может проходить по той же среде (для волокна, например, с разными модами или длинами волн) или с использованием отдельной среды той же длины, что и прямой путь (т.е. для волокна означает еще один такой же составной кабель).
[00127] Каждая частота электрического сигнала множества несущих распределяется на определенную длину волны оптического сигнала синхронизации. В этом случае сигнал синхронизации останется непрерывным во времени сигналом. Оптический сигнал синхронизации может быть отправлен по одному оптическому волокну для соединения подрешеток. Распределение к каждому ARU может быть выполнено посредством межсоединительной коробки, которая разделяет оптический сигнал для распределения по коротким волокнам для соединения с каждым ARU. Оптический сигнал синхронизации может быть преобразован обратно в электрический сигнал, а соединение в коммутационной коробке осуществляется короткими эквивалентными электрическими межсоединительными кабелями.
[00128] В некоторых вариантах осуществления для передачи сигналов синхронизации по волоконным или медным кабелям используется временное мультиплексирование и отправка обратно данных о выравнивании фазы по той же среде. В некоторых вариантах осуществления схема синхронизации с временным мультиплексированием может применяться путем модуляции интенсивности света. Принцип соединений CU и ARU аналогичен или идентичен описанным выше примерам.
[00129] Использование для архитектуры оптической реализации контура фазовой автоподстройки (PLL) также описано выше. В некоторых вариантах осуществления альтернатива состоит в использовании оптических блоков PLL в контуре синхронизации так, что синхронизация достигается в оптической области. Эта реализация повысит общую точность синхронизации, поскольку при более быстрой оптической синхронизации фазовый шум и дрожание фазы будут на частотах выше частот электрической синхронизации.
[00130] Звездообразное распределение общего сигнала синхронизации
[00131] Было проведено испытание для оценки возможности удержания локальных блоков ТСХО ARU на небольшой интервал времени, в течение которого блок управления может измерять задержку ТСХО, возвращаемую ARU, посредством того же кабеля, который используется для передачи общего ТСХО.
[00132] Испытательный стенд: два передатчика DVOR (SDR на частоте 115 МГц), каждый синхронизирован со своим собственным свободно работающим ТСХО (40 МГц); заявленная производителем стабильность частоты порядка 0,1÷1 ppm (т.е. более 30 Гц на частоте GP) в зависимости от напряжения питания, нагрузки, температуры, старения. На фиг. 12 показаны два передатчика DVOR, выполненные в соответствии с некоторыми вариантами осуществления.
[00133] Результаты измерений показывают, что две несущие (с частотой 115 МГц) смещают друг друга по меньшей мере на 0,1 Гц, что соответствует 0,3 Гц на частоте 330 МГц (частота GP). Это смещение частоты приводит к сдвигу фазы на несколько десятков градусов за небольшую долю секунды, что неприемлемо.
[00134] Вывод заключается в том, что, если передатчики реализованы с одним и тем же ТСХО, их нельзя оставлять несинхронизированными даже на небольшую долю секунд, а единственным жизнеспособным вариантом является удержание локального ТСХО на несколько миллисекунд. В течение этого интервала блуждания ТСХО разумно меньше, и демодулятор приемника может быть нечувствительным к изменению сигнала в пространстве, поскольку тона модуляции составляют 90 Гц и 150 Гц.
[00135] Обсуждение и оценка
[00136] Результаты изучения различных вариантов осуществления, раскрытых в настоящем документе, показывают, что синхронизация фазу удаленных блоков осуществима с использованием обоих подходов (общий сигнал или несколько несущих), удовлетворяющих целевому выравниванию фазы в 1 градус.
[00137] Для синхронизации модуляции в обоих случаях можно использовать низкочастотный импульс для надлежащего выравнивания модулирующих сигналов и, в конечном счете, для передачи конфигурационных данных двумя путями. Было бы возможно реализовать решение, используя один кабель для объединения и передачи высокочастотной синхронизации фазы, низкочастотных импульсов и данных, а также питания на удаленный ARU.
[00138] Ключевые отличия, обеспечиваемые различными вариантами осуществления, раскрытыми в настоящем документе, могут включать:
[00139] Звездообразное распределение общего сигнала синхронизации
1) Длины кабелей периодически измеряются и компенсируются в ARU, передающем надлежащие данные.
2) Более простая аппаратная (HW) реализация.
3) ТСХО необходимо переводить в состояние удержания во время измерения кабеля.
4) Систему можно масштабировать, добавляя блоки ARU, но с учетом ограничений опроса при временном мультиплексировании.
[00140] Контур синхронизации фазы на основе нескольких несущих
1) Нечувствительность к длинам кабелей и колебаниям температуры.
2) Требуется некоторая фильтрация для разделения несущих и, как правило, более сложная аппаратная реализация.
3) Контроль синхронизации в режиме реального времени и отсутствие необходимости переводить ТХСО в состояние удержания.
4) Систему можно масштабировать, повторяя архитектуру точка к точке.
[00141] Далее описываются производные требования в различных вариантах осуществления. Некоторые варианты осуществления связаны со следующими требованиями, основанными на уникальных требованиях заказчика для данного исследования:
а) В соответствии с некоторыми вариантами осуществления система глиссады должна быть без формирования изображения.
- Обычные системы глиссады с изображением требуют большой плоской поверхности перед антенной глиссады для создания надлежащего сигнала в пространстве. Таким образом, система с изображением не может соответствовать требованиям для установки в «суровых» местоположениях.
b) В системе глиссады должна использоваться горизонтальная решетка антенны или вертикальная решетка антенны на короткой мачте.
- Обычная решетка антенны глиссады монтируется на высокой (до 60 футов) и тяжелой башне, что несовместимо с транспортабельностью и требованиями к установке.
c) Каждая антенна в решетках курсового радиомаяка и глиссады возбуждается отдельным антенным радиоблоком (ARU), который представляет собой «программно-определяемые» передатчики приемник. Приемник используется для контроля.
- Обычный курсовой радиомаяк или система глиссады имеют один передатчик, подключенный к антеннам через аппаратный блок распределения. Использование небольшого ARU для каждой антенны упрощает упаковку и установку, а также обеспечивает гораздо большую гибкость при проектировании и настройке, поскольку амплитуду и фазу сигнала каждой антенны можно точно установить посредством программного обеспечения.
[00142] Ниже обсуждаются некоторые дополнительные варианты осуществления концепции разработки, подходы к оценке и применяемые способы.
[00143] Основная часть усилий по разработке была сосредоточена на системе антенны глиссады, поскольку она представляет собой совершенно новую конструкцию. Были рассмотрены различные конфигурации, анализирующие характеристики сигнала в пространстве в рамках ограничений требований к упаковке и времени установки.
[00144] Ниже обсуждаются некоторые варианты осуществления подходов к созданию концепции.
[00145] Глиссада
[00146] В некоторых вариантах осуществления система глиссады требует радикально отличающегося подхода к конструкции решетки антенны. Для каждой исследованной конфигурации решетки были выполнены моделирования для оценки характеристик сигнала в пространстве. Возможности моделирований включают:
a) График разницы глубины модуляции (DDM) в зависимости от угла возвышения в диапазоне углов азимута. (Примечание: DDM - это базовая характеристика сигнала, которая позволяет приемнику ILS летательного аппарата измерять вертикальный уход положения летательного аппарата от желаемой глиссады. Для типичной глиссады 3° DDM равен нулю при 3° и увеличивается по мере снижения летательного аппарата ниже глиссады и уменьшается по мере подъема летательного аппарата выше глиссады).
b) График зависимости DDM от угла азимута в диапазоне углов возвышения.
c) График зависимости DDM от расстояния до решетки антенны глиссады в диапазоне углов возвышения и азимута.
d) График мощности и фазы CSB и SBO при описанных выше условиях для DDM. (Примечание: CSB [несущая плюс боковая полоса] и SBO [только боковая полоса] представляют собой два компонента сигнала в пространстве, которые при объединении создают DDM).
e) Влияние механического смещения антенны на DDM.
f) Влияние мощности ARU и ошибок фазы на DDM.
g) Влияние отражений от земли, в том числе от неровной и наклонной поверхности земли.
h) Влияние радиочастотной связи между антеннами в решетке.
i) Диаграммы направленности и другие характеристики отдельных антенн.
[00147] Графики DDM показывают сигнал в пространстве, угол и ширину глиссады, которые являются ключевыми параметрами, которые сравнивались с ограничениями Приложения 10 конвенции ИКАО и Приказа 8200.1 FAA.
[00148] Курсовой радиомаяк
[00149] В некоторых вариантах осуществления решетка антенны курсового радиомаяка может быть основана на стандартной 8-элементной решетке, которая может отличаться от некоторых существующих решеток в механической системе поддержки (модифицированной для упрощения упаковки и установки) и конструкции отдельных элементов антенны (модифицированных для уменьшения размеров и веса). Еще одно отличие заключается в использовании отдельного ARU для каждого из 8 элементов. Это обеспечивает значительное улучшение настройки пика, поскольку точная регулировка фазы может выполняться посредством программного обеспечения, а не с помощью обычного метода обрезки коаксиального кабеля. Моделирования были выполнены для оценки характеристик элементов-кандидатов с точки зрения диаграммы направленности, коэффициента усиления, коэффициента обратного излучения и т.д.
[00150] Обычно используемые решетки антенны курсового радиомаяка различаются по размеру от 8 до 32 элементов, чем больше элементов, тем шире решетка. Ширина луча курсового радиомаяка обратно пропорциональна размеру апертуры. Курсовые радиомаяки с более широкой апертурой менее подвержены искажениям от многолучевых отражений, вызывающих изгибы курса. Например, решетка из 32 элементов используется для курсовых радиомаяков категории III в аэропортах, где очень большие самолеты (например, Airbus А380) при рулении вблизи взлетно-посадочной полосы могут вызвать изгибы на курсе захода на посадку, превышающие ограничения категории III.
[00151] Конфигурация с 8 элементами была выбрана для этого приложения как результат компромисса между требованиями к характеристикам (CATI) и требованиями к упаковке и времени установки.
[00152] Подход к анализу концепции
[00153] Концепции системы посадки, разработанные для этого исследования, были проанализированы с учетом различных требований. Многие комбинации конкретных требований требуют компромиссов, например, для стабильного сигнала в пространстве требуются прочные и жесткие конструкции для крепления антенны, но требования к упаковке и установке требуют, чтобы они были как можно меньше и легче.
[00154] Некоторые варианты осуществления решетки антенны глиссады описаны ниже.
[00155] Разработка решетки антенны глиссады, отвечающей всем требованиям этой программы, является сложной задачей. Были проанализированы два типа решеток: горизонтальная решетка, смонтированная на высоте метра или двух над землей, и вертикальная решетка, смонтированная на мачте высотой 6 метров.
[00156] Сигнал системы глиссады в пространстве имеет два компонента: несущая плюс боковая полоса (CSB) и только боковая полоса (SBO). Сигнал CSB представляет собой несущую с амплитудой на 80% модулированной двумя тонами 90 Гц и 150 Гц с одинаковой амплитудой, а сигнал SBO представляет собой сигнал с подавленной амплитудой несущей, модулированный двумя тонами 90 Гц и 150 Гц с одинаковой амплитудой и противоположной фазой относительно тонов CSB. Если V →csb и V →sbo являются общими фазорами модуляции CSB и SBO, принятыми в любой точке пространства (комбинация которых зависит от местоположения приемника относительно каждой передающей антенны), DDM в этой точке можно вычислить как:

[00157] Чтобы создать подходящий сигнал глиссады в пространстве, необходимо выбрать соответствующие амплитуду и фазу CSB и SBO на каждом элементе антенны, чтобы получить нулевой DDM на глиссаде. Обычно это достигается путем достижения нулевой амплитуды SBO при желаемом угле глиссады, обычно 3°. Этот подход может быть использован в настоящем изобретении для горизонтальной решетки. Однако это также можно сделать, отрегулировав фазы, чтобы сделать функцию косинуса нулевой (т.е. фаза CSB и SBO в квадратуре), и это был подход, принятый для вертикальной решетки без формирования изображения.
[00158] Для решетки глиссады были рассмотрены два типа элементов антенны: логопериодический диполь (LPD) и антенна Вивальди, т.е. антенна с конической щелью, которая по существу представляет собой плоскую пластину. Блоки Вивальди можно очень компактно складывать друг на друга при транспортировке, хотя LPD имеет лучшую направленность, что снижает требования к мощности передатчика. На фиг. 13 показана приведенная для примера антенна Вивальди размером 0,75 м на 0,75 м с коэффициентом усиления 5,2 дБи (плюс коэффициент решетки). На фиг. 14 также показана приведенная для примера антенна LPD, которая может иметь длину 0,74 м и коэффициент усиления 9 дБи (плюс коэффициент решетки).
[00159] В некоторых вариантах осуществления центральный блок выполнен с возможностью синтеза сигнала глубины модуляции (Depth of Modulation, DDM) и/или сигнала суммарной глубины модуляции (Sum Depth of Modulation, SDM), принятых находящимся в воздухе летательным аппаратом, на основе измеренных РЧ-параметров, принятых от одного или более отдельных блоков ARU. В этом варианте осуществления центральный блок выполнен с возможностью определения, соответствует ли или превышает ли синтезированный сигнал DDM и/или сигнал SDM заранее заданное пороговое значение, на основе сравнения сигнала DDM и/или сигнала SDM с одним или более сконфигурированными РЧ-параметрами отдельных блоков ARU. В некоторых вариантах осуществления центральный блок выполнен с возможностью прекращения работы множества блоков ARU в ответ на определение того, что синтезированный сигнал DDM и/или сигнал SDM соответствует заранее заданному пороговому значению или превышает его. В некоторых других вариантах осуществления центральный блок выполнен с возможностью продолжения работы множества блоков ARU в ответ на определение того, что синтезированный сигнал DDM и/или сигнал SDM не соответствует заранее заданному пороговому значению или не превышает его.
[00160] Для контроля в центральном блоке поле, принятое пользователем на борту, синтезируется на основе измеренных РЧ-параметров от Rx отдельных блоков ARU и перенаправляется в центральный блок. Исполнительный блок контроля в СРМ синтезирует результирующий DDM и сравнивает сигнал с сконфигурированными значениями. Такой подход позволяет быстро оценить сигнал в пространстве в любом желаемом местоположении (азимут, угол возвышения и ближнее поле тоже) и в зависимости от их количества. Например, контроль может выполняться для любого диапазона значений входных сигналов блока контроля в любом местоположении, и может быть синтезирован DDM, воспринимаемый пользователем на борту. Напротив, в стандартной ILS можно оценить только несколько фиксированных местоположений. При обнаружении разногласия, которое превышает заранее заданное пороговое значение, от СРМ LOC отправляется уведомление, которое инициирует прекращение работы TX/RX блоков ARU LOC.
[00161] В некоторых вариантах осуществления каждый ARU из множества блоков ARU выполнен с возможностью приема модулированного РЧ-сигнала, подаваемого на антенну из множества антенн, связанную с ARU, и определения, соответствует ли или превышает ли модулированный РЧ-сигнал заранее заданное пороговое значение, на основе сравнения модулированного РЧ-сигнала с одним или более параметрами сигнала ARU. В некоторых вариантах осуществления каждый ARU из множества блоков ARU также выполнен с возможностью передачи сообщения в центральный блок, которое включает индикацию того, что модулированный РЧ-сигнал соответствует заранее заданному пороговому значению или превышает его на основе определения того, что модулированный РЧ-сигнал соответствует заранее заданному пороговому значению или превышает его. В этом варианте осуществления центральный блок выполнен с возможностью определения продолжать ли работу одного или более блоков ARU из множества блоков ARU на основе упомянутого сообщения.
[00162] В качестве альтернативы для контроля сигнала в центральном блоке индивидуальный контроль отдельных РЧ-параметров может выполняться непосредственно в ARU. В этом случае отношение между действительностью DDM, принятого в местоположении летательного аппарата, обеспечивается пороговым значениями отдельных блоков контроля для каждого ARU. Каждый (TX/RX) ARU принимает собственный РЧ-сигнал и сравнивает параметры сигнала с сконфигурированными значениями. При обнаружении на центральный блок отправляется сообщение, которое имеет дополнительную логику для принятия решения о прекращении работы дальнейших или всех блоков ARU.
[00163] В некоторых вариантах осуществления антенный радиоблок контроля выполнен с возможностью приема РЧ-сигналов, излучаемых множеством антенн. В этом варианте осуществления антенный радиоблок контроля также выполнен с возможностью определения, совпадают ли РЧ-сигналы, излучаемые множеством антенн, с ожидаемым сигналом DDM и/или сигналом SDM, принятыми находящимся в воздухе летательным аппаратом, от системы ILS. В некоторых вариантах осуществления антенный радиоблок контроля также выполнен с возможностью работы для инициирования прекращения излучения РЧ-сигналов множеством антенн в ответ на определение того, что РЧ-сигналы, излучаемые множеством антенн, не совпадают с ожидаемым сигналом DDM и/или сигналом SDM, принятыми находящимся в воздухе летательным аппаратом, от системы ILS. В некоторых других вариантах осуществления антенный радиоблок контроля также выполнен с возможностью работы для инициирования повторной калибровки излучения РЧ-сигналов множеством антенн в ответ на определение того, что РЧ-сигналы, излучаемые множеством антенн, отклоняются в заранее заданном пороге от предыдущих РЧ-сигналов, излученных во время процесса калибровки системы ILS.
[00164] Дополнительный ARU может быть установлен и сконфигурирован только для приема (только RX) излучаемого сигнала, предназначенного для полевого контроля, с точки зрения DDM. При типичном использовании блок контроля поля прерывает излучаемый сигнал при обнаружении ошибочного смещения. Кроме того, блок контроля поля можно использовать для контроля состояния, т.е. для обнаружения изменений сигнала, которые не являются критическими для пользователя, но уходят от предыдущего откалиброванного состояния. В этих случаях блок контроля поля может быть использован для повторной калибровки сигнала с использованием средств, автономных по отношению к системе, без необходимости использования летательного аппарата для полетной проверки. В связи с этим центральный блок может дать команду различным блокам ARU излучать сигнал отдельно или в группах из нескольких блоков ARU, чтобы максимально приблизить сигнал к состоянию минимального отказа. Это можно сделать посредством поискового алгоритма, который ищет минимальный уход от желаемого DDM путем циклического изменения и регулировки различных значений параметров для каждого ARU.
[00165] Хотя прекращение работы всех блоков ARU описано выше, следует понимать, что в некоторых ситуациях возможно прекращение работы одного или более блоков ARU и продолжение работы оставшихся блоков ARU. Например, если результирующее общее поле все еще находится в пределах допуска, работа оставшихся блоков ARU возможна до тех пор, пока не будут скорректированы затронутые блоки ARU. В этой ситуации загружается другой набор параметров, относящихся к потере затронутого ARU или блоков ARU, чтобы привести результирующее общее поле в пределы допуска.
[00166] В некоторых вариантах осуществления блок контроля поля может представлять собой мобильную мачту, несущую приемную антенну и приемник измерения сигнала, подключенный к центральному блоку. Эту настройку может быть использована только для калибровки и может быть удалена после калибровки сигнала.
[00167] Горизонтальная решетка глиссады
[00168] Первая проанализированная решетка представляла собой решетку без формирования изображения, выполненную как обычная нулевая эталонная решетка формирующая изображение и включающую 2 антенны, смонтированные на башне, уложенные плоско к земле, с изображениями нулевого эталона, преобразованными в физические антенны, что привело к 4-элементной линейной горизонтальной решетке. На фиг. 15 показан схематический вид с воздуха на эту решетку и взлетно-посадочную полосу (не в масштабе).
[00169] Фиг. 15 иллюстрирует конфигурацию четырехэлементной горизонтальной решетки антенны глиссады согласно некоторым вариантам осуществления.
[00170] Разнесение между элементами для этой решетки было значительно увеличено по сравнению с разнесением вертикальной нулевой эталонной решетки, чтобы снизить чувствительность сигнала в пространстве к отклонениям положения антенны. Апертура решетки (параллельно взлетно-посадочной полосе) составляла приблизительно 160 метров. Эта решетка дала превосходную кривую DDM в зависимости от угла возвышения, как показано на фиг. 16. Показанная кривая относится к системе с типичным углом глиссады 3°, хотя угол может быть установлен в диапазоне от 2,5° до 3,5° путем регулировки фазы сигнала SBO.
[00171] Фиг. 16 иллюстрирует зависимость DDM от угла возвышения для четырехэлементной горизонтальной решетки согласно некоторым вариантам осуществления. Отметим, что DDM равен нулю при угле возвышения 3° и становится все более положительным (индикация «лететь выше») при меньших углах возвышения и все более отрицательным (индикация «лететь ниже») при больших углах возвышения.
[00172] На фиг. 17 показана мощность сигналов CSB и SBO в зависимости от угла возвышения. Обратите внимание на ноль в SBO при 3°. На фиг. 18 показаны фазы сигналов CSB и SBO в зависимости от угла возвышения. Отметим, что фаза сигнала SBO составляет -90° (в квадратуре с фазой сигнала CSB) при угле возвышения 3°.
[00173] В 4-элементной решетке сигналы SBO (только боковая полоса несущей) возбуждают внешнюю пару антенн, а сигналы CSB (несущая плюс боковая полоса) возбуждают внутреннюю пару антенн. Дальнейший анализ показал, что такую же кривую DDM можно было бы получить, если бы внутреннюю пару убрали, а внешнюю пару возбуждали посредством как сигналов CSB, так и сигналов SBO. Результирующая двухэлементная решетка показана на фиг. 19.
[00174] Таким образом, в некоторых вариантах осуществления множество антенн содержит решетку глиссады из антенн и решетку курсового радиомаяка из антенн, а каждая антенна решетки глиссады и каждая антенна решетки курсового радиомаяка возбуждается отличающимся блоком ARU из блоков ARU. Каждый из блоков ARU может быть программно-определяемым радиоблоком, выполненным с возможностью работы для генерирования модулированного радиочастотного сигнала с программируемой несущей частотой и с программируемыми конфигурационными значениями. Программируемые конфигурационные значения могут включать по меньшей мере одно из следующего: мощность РЧ-сигнала, фазу РЧ-сигнала, глубины модуляции и фазы. Решетка глиссады из антенн может включать по меньшей мере четыре элемента антенны, расположенные горизонтально на расстоянии друг от друга, для обеспечения по меньшей мере четырехэлементной горизонтальной решетки. В некоторых вариантах осуществления решетка глиссады из антенн имеет 10 элементов антенны, расположенных горизонтально на расстоянии друг от друга, для обеспечения десятиэлементной горизонтальной решетки. Когда решетка глиссады из антенн имеет четырехэлементную горизонтальную решетку, в дополнительном варианте осуществления внешняя пара антенн решетки глиссады возбуждается посредством сигналов только боковой полосы (SBO), а внутренняя пара антенн решетки глиссады возбуждается посредством сигналов несущей плюс боковой полосы (CSB).
[00175] Фиг. 19 иллюстрирует вариант осуществления конфигурации двухэлементной горизонтальной решетки антенны глиссады. Если изучить поведение DDM в диапазоне углов азимута по отношению к оси решетки, становится очевидным, что диапазон, в котором создается надлежащий сигнал, может быть слишком мал для практической системы глиссады. Линейная решетка глиссады с 2, 4 или любым количеством элементов антенны создает сигнал в пространстве, для которого угол глиссады постоянен на конической поверхности, окружающей ось решетки.
[00176] Фиг. 20 иллюстрирует вид сбоку варианта осуществления обычной нулевой эталонной решетки с поперечным сечением в виде конуса. В некоторых вариантах осуществления этой решетки конус очень пологий и полностью огибает вокруг башню антенны. Нулевая эталонная решетка с изображением имеет теоретическое покрытие по азимуту 360°, ограниченное только диаграммой направленности по азимуту элементов антенны.
[00177] Фиг. 21 иллюстрирует вид сбоку варианта осуществления горизонтальной решетки. В этом случае поверхность глиссады представляет собой очень глубокий конус. Она охватывает небольшой диапазон углов азимута. Фиг. 22 иллюстрирует вариант осуществления поперечного сечения конуса, если смотреть из летательного аппарата на траектории захода на посадку.
[00178] В некоторых вариантах осуществления поперечное сечение глиссады представляет собой дугу с радиусом 3°, окружающую ось решетки. Отметим, что радиус измеряется в градусах, а не в линейном расстоянии. Фиг. 22 можно также интерпретировать как указание расстояния до поверхности глиссады на заданном расстоянии вдоль центральной линии взлетно-посадочной полосы от решетки антенны. Летательный аппарат, находящийся непосредственно над удлиняющейся осью решетки, будет видеть нулевой DDM при глиссаде 3°. Однако летательный аппарат, находящийся при угле возвышения 3° вправо или влево от оси решетки, будет видеть ошибочный отрицательный DDM («лететь ниже»). Если летательный аппарат находится на 3° в стороне от центральной линии взлетно-посадочной полосы, он будет видеть серьезную индикацию «лететь ниже», что эквивалентно нахождению на 3° выше глиссады.
[00179] Расширить покрытие по азимуту можно добавлением антенн по обеим сторонам оси решетки. Например, фиг. 23 иллюстрирует вариант осуществления конфигурации десятиэлементной горизонтальной решетки антенны глиссады.
[00180] Эта решетка содержит 5 пар антенн с центральной парой, выровненной с осью решетки (не обязательно параллельно взлетно-посадочной полосе), 2 парами, выровненными приблизительно на 2,25° в каждую сторону от оси решетки, и 2 парами, выровненными приблизительно на 5° в каждую сторону оси. Это приводит к 2 дугам антенн, разнесенным на 120-160 м друг от друга. Было определено, что точное расстояние разделения не является критическим. Более близкое разнесение между двумя дугами антенн обеспечивает более точную синхронизацию фаз между блоками ARU, но увеличивает чувствительность сигнала в пространстве к ошибкам положения антенны. Оптимальное разнесение еще не определено, но ожидается, что оно будет в нижней части этого диапазона. Разнесение не зависит от угла глиссады или несущей частоты. Разнесение может быть одинаковым для всех типов установки.
[00181] В одном варианте осуществления десятиэлементная горизонтальная решетка включает 5 пар антенн с центральной парой выровненной с осью решетки, с 2 парами, выровненными приблизительно на 2,25° по противоположным сторонам оси решетки, и с 2 парами, выровненными приблизительно на 5° по противоположным сторонам оси решетки, при этом антенны каждой пары разнесены в пространстве на расстояние от приблизительно 120 метров до приблизительно 160 метров.
[00182] Поперечные сечения поверхностей глиссады отдельных пар антенн показаны на фиг. 24. Фиг. 24 иллюстрирует вариант осуществления поперечного сечения глиссады отдельной пары. Излучаемые сигналы от 5 пар объединяются сложным образом, а не простым сложением мощностей. Если мощности и фазы сигналов CSB и SBO для каждой антенны выбраны правильно, можно получить почти плоский угол глиссады в диапазоне азимута ±6°.
[00183] Фиг. 25 иллюстрирует вариант осуществления DDM при угле возвышения 3° в зависимости от угла азимута для этой решетки. Это указывает на то, что угол глиссады очень близок к 3° в диапазоне азимута ±6° и быстро снижается за пределами этого диапазона.
[00184] В одном варианте осуществления блоки ARU выполнены с возможностью возбуждения антенн с использованием мощностей и фаз сигналов CSB и SBO для каждой антенны, которые управляются для обеспечения почти плоского угла глиссады в диапазоне азимута ±6°.
[00185] Фиг. 26 иллюстрирует вариант осуществления DDM десятиэлементной горизонтальной решетки глиссады в зависимости от угла возвышения. Кривые DDM по возвышению и азимуту для этой решетки подходят для системы глиссады категории I, за одним исключением. Резкое уменьшение DDM (т.е. в направлении «лететь ниже») при углах азимута за пределами ±6° может быть неприемлемым по соображениям безопасности. Более безопасное решение состоит в том, чтобы кривая DDM указывала «лететь выше» при углах азимута за пределами диапазона покрытия. Это может быть достигнуто путем добавления подходящего сигнала клиренса.
[00186] Сигнал клиренса (CLR) представляет собой отдельный сигнал несущей, смещенный на 5 кГц по частоте, который модулируется с фиксированным преобладанием 150 Гц только по отношению к 90 Гц, что дает чистый фиксированный положительный сигнал DDM (т.е. «лететь выше»). Диаграмма направленности сигнала клиренса сформирована таким образом, что его мощность меньше, чем мощность сигнала CSB для углов азимута внутри ±6°, и больше, чем мощность сигнала CSB для углов азимута вне этого диапазона. Приемник глиссады летательного аппарата за счет «эффекта захвата» будет синхронизироваться либо на сигнал пути, либо на сигнал клиренса, в зависимости от того, что больше, в результате чего объединенная кривая DDM имеет хвосты «лететь выше» за пределами диапазона покрытия по азимуту.
[00187] Таким образом, в одном варианте осуществления блоки ARU выполнены с возможностью возбуждения антенн с использованием сигнала клиренса (CLR), который представляет собой отдельный сигнал несущей, смещенный на 5 кГц по частоте, который модулируется только частотой 150 Гц, что создает чистый сигнал «лететь выше», и где центральный блок выполнен с возможностью работы для индивидуальной регулировки CLR каждого из блоков ARU. Диаграмма направленности сигнала клиренса (CLR) может быть сформирована под управлением центрального блока так, чтобы мощность сигнала CLR была меньше, чем мощность сигнала курса глиссады, передаваемого антеннами решетки глиссады для углов азимута внутри ±6°, и больше чем мощность сигнала курса глиссады для углов азимута за пределами этого диапазона.
[00188] Одним из вариантов передачи сигнала клиренса может быть использование отдельной решетки антенны, но для минимизации количества антенн можно использовать 5 антенн в передней части существующей решетки. Фиг. 27 иллюстрирует вариант осуществления DDM с клиренсом в зависимости от угла азимута. Градусы азимута относятся к удлиняющейся центральной линии взлетно-посадочной полосы на этом графике, с учетом смещения решетки глиссады, поэтому диаграмма не симметрична.
[00189] Передние антенны пути не идеально расположены в пространстве для создания диаграммы клиренса, поэтому были необходимы некоторые компромиссы в диаграмме DDM. В некоторых вариантах осуществления должны быть отрегулированы параметры сигнала пути и сигнала клиренса, а также разнесение антенн, чтобы получить приемлемую составную кривую DDM по азимуту. Отметим, что диапазон покрытия по азимуту несколько снижен по сравнению с диапазоном без клиренса, а изменение DDM внутри диапазона покрытия несколько больше. Оптимизация комбинированного сигнала пути/клиренса для создания максимального диапазона азимута с максимальной плоскостностью в пределах диапазона азимута продолжается.
[00190] Фиг. 28 иллюстрирует график DDM с клиренсом в зависимости от дальности до точки приземления. График основан на летательном аппарате на центральной линии взлетно-посадочной полосы со смещенной решеткой глиссады. Отметим, что при наличии сигнала клиренса DDM движется в направлении «лететь выше» в пределах 500 метров от точки приземления. Это значительно превышает высоту принятия решения по категории I, поэтому не влияет на нормальную работу. Однако это охватывает характеристику «лететь ниже» на приблизительно 400 метров от DDM без клиренса, что может быть потенциально опасным.
[00191] Физическая реализация горизонтальной решетки слегка изменяет компоновку, показанную на фиг. 23, так что дуги заменяются линейным рядом антенн. Моделирование показывает, что эта конфигурация может производить сигнал в пространстве, эквивалентный сигналу дуг. Линейность передней и задней подрешеток позволяет установить антенны в подрешетки на единой телескопической конструкции, как показано на фиг. 29. Фиг. 29 иллюстрирует монтажную конструкцию горизонтальной решетки в соответствии с одним вариантом осуществления. Структура показана с антеннами LDP.
[00192] Вертикальная решетка без формирования изображения
[00193] Альтернативой горизонтальной решетке глиссады является вертикальная решетка без формирования изображения. Подход к этой разработке отходит от обычной методологии размещения нуля SBO при желаемом угле возвышения глиссады. Вместо этого нулевой DDM при угле глиссады был создан путем регулировки фаз, чтобы сделать функцию косинуса равной нулю при угле глиссады (т.е. SBO в квадратуре по отношению к CSB), и это был подход, принятый для вертикальной решетки без формирования изображения. На фиг.30 показаны графики мощности сигналов CSB и SBO в зависимости от угла возвышения для вертикальной решетки без изображения. Сравните с фиг. 17 для горизонтальной решетки.
[00194] На фиг. 31 показан график зависимости фаз сигналов CSB и SBO от угла возвышения для вертикальной решетки без изображения. Сравните с фиг. 18 для горизонтальной решетки. Отметим, что как для горизонтальной, так и для вертикальной решеток фаза сигнала SBO находится в квадратуре с CSB при угле глиссады.
[00195] Вертикальная решетка, как показано на фиг. 32, включает 3 антенны, смонтированные на мачте и разнесенные в пространстве на высоту 1 м, 3,5 м и 6 м в соответствии с некоторыми вариантами осуществления. Центральная антенна должна быть смонтирована посередине между верхней и нижней антеннами, чтобы обеспечить надлежащий сигнал глиссады. Общее разнесение было выбрано как компромисс между потребностью в относительно короткой мачте антенны (в соответствии с требованиями к упаковке и времени установки) и чувствительностью сигнала в пространстве к допускам положения антенны. Размещение нижней антенны ниже 1 м приводит к нежелательным эффектам ближнего поля.
[00196] Хотя вертикальная решетка напоминает обычную решетку глиссады М типа с изображением, она полностью отличается, будучи короче, создавая сигнал в пространстве без изображения и используя метод, который устанавливает квадратурную разность фаз между сигналами CSB и SBO на глиссаде.
[00197] Фиг. 33 иллюстрирует вариант осуществления DDM вертикальной решетки глиссады без формирования изображения в зависимости от угла возвышения. Пунктирная линия указывает ограничения Приложения 10 конвенции ИКАО для DDM. Отметим, что DDM равен нулю при угле возвышения 3°, хотя амплитуда SBO на фиг. 27 не имеет нуля в этой точке. Физическая реализация вертикальной решетки показана на фиг. 34. Более конкретно, фиг. 34 иллюстрирует монтажную конструкцию вертикальной решетки в соответствии с некоторыми вариантами осуществления. Мачта телескопически выдвигается для компактной упаковки и быстрой установки и закрепляется стяжками для жесткости при сильном ветре. Это показано для сдвоенных антенн LPD. Необходимость дублирования антенн в некоторых вариантах осуществления объясняется ниже в отношении затрат мощности.
[00198] Вариант осуществления курсового радиомаяка описан ниже.
[00199] Решетка антенны курсового радиомаяка может быть основана на конфигурации стандартной восьмиэлементной одночастотной (т.е. без сигнала клиренса) решетки, которая используется для заходов на посадку по категории I во всем мире. Для некоторых вариантов осуществления обычные элементы антенны LPD заменяются двойными дипольными элементами, которые значительно меньше и легче, чем элементы LPD. Двойные дипольные элементы могут иметь размеры 0,68 м на 1,36 м с коэффициентом усиления 4,9 дБи (плюс коэффициент решетки) в соответствии с одним вариантом осуществления. Двойные диполи немного менее направленны, чем элементы LPD. Это оказывает небольшое, но незначительное влияние на диаграмму DDM, а также немного увеличивает требования к мощности передатчика. Система монтажа антенны была изменена, чтобы ее можно было упаковать в меньший объем и быстрее установить.
[00200] На фиг. 35 показана механическая конструкция элементов антенны решетки курсового радиомаяка и опорной структуры в соответствии с некоторыми вариантами осуществления. Опорная структура телескопически сдвигается в компактный блок для транспортировки. Элементы антенны представляют собой двойные диполи. Три соединительных стержня между диполями представляют собой непроводящие элементы, используемые для обеспечения механической жесткости. Двойные дипольные антенны имеют немного меньшую направленность, чем антенны LPD.
[00201] Восьмиэлементная решетка может быть выбрана в результате компромисса. Обычно используемые решетки курсового радиомаяка имеют размер от 8 до 32 элементов. Чем больше элементов, тем шире апертура решетки, а чем шире апертура, тем уже луч курсового радиомаяка. Курсовые радиомаяки с узким лучом менее подвержены деградации сигнала от многолучевых отражений от структур на стороне пути посадки. В этих вариантах осуществления может быть предпочтителен более широкий луч из-за относительно небольшого размера восьмиэлементной решетки и из-за того, что ILS должна поддерживать только заходы на посадку по категории I.
[00202] Сигнал курсового радиомаяка формируется аналогично сигналу глиссады, за исключением того, что он имеет другой уровень модуляции и предназначен для создания нулевого DDM при нулевом угле азимута, согласно следующему уравнению:

[00203] На фиг. 36 и 37 показаны зависимость мощности CSB/SBO от угла азимута и зависимость DDM от угла азимута. Эти графики были получены путем моделирования FEKO.
[00204] Далее описываются ошибки и/или чувствительность к ошибкам для некоторых вариантов осуществления, описанных выше.
[00205] Графики, проиллюстрированные на фигурах выше, могут быть получены при моделировании «теоретически совершенных» систем. Однако существует ряд источников ошибок, присущих реальным системам, поэтому можно выполнить моделирования для оценки влияния известных ошибок на сигнал в пространстве. Идентифицированные источники ошибок в основном случайны, и их величина меняется во времени. Можно предположить, что каждый источник ошибки имеет долговременную составляющую (т.е. составляющую, которая существенно не меняется в течение нескольких минут захода на посадку) и кратковременную составляющую, которая существенно меняется во время захода на посадку.
[00206] Могут существовать различные ограничения для долговременного и кратковременного изменения сигнала в пространстве угла глиссады. В Приложении 10 конвенции ИКАО и в разделе о стихийных бедствиях Приказа 8200.1 FAA определены ограничения на угол глиссады, предусматривающие «регулировку и поддержание», что является долговременным требованием. Кратковременное изменение угла глиссады, обычно вызываемое многолучевыми отражениями в обычных системах глиссады с изображением, называется «структурой» или «изгибами» и также имеет ограничения, предусмотренные Приложением 10 и Приказом 8200.1. Приложение 10 ограничивает изгибы в единицах DDM с вероятностью 95%. Приказ 8200.1 использует единицы микроампер (мкА), что относится к выходному сигналу приемника летательного аппарата, который пропорционален DDM.
[00207] В таблице 2 обобщены долговременные и кратковременные ограничения ошибки глиссады в двух документах с требованиями. Все ограничения в таблице 2 были переведены в единицы градусов. Отметим, что ограничения Приказа 8200.1 несколько слабее (можно предположить, что это применимые ограничения для данной программы). В таблице 2 показаны ограничения ошибки глиссады согласно Приложению 10 и Приказу 8200.1.

[00208] Анализируемые источники ошибок могут включать:
- Ошибки положения антенны. Эти ошибки включают отклонения при установке, а также динамическое перемещение элементов антенны при сильном ветре. Ошибки включают только ошибки продольного положения. Моделирование показало гораздо меньшую чувствительность к боковым ошибкам и ошибкам положения по высоте.
- Изменение мощности передатчика. В первую очередь это долговременные (т.е. более продолжительные, чем одна посадка) эффекты температуры и старения.
- Изменение фазы передатчика. Сдвиг фазы, общий для всех сигналов на всех антеннах, не вызывает никакого эффекта, но, поскольку каждая антенна возбуждена отдельным передатчиком, передатчики должны быть синхронизированы с отклонением до 10 пикосекунд. Этот допуск приводит к небольшой величине долговременной и кратковременной разности фаз между антеннами.
[00209] Моделирование методом Монте-Карло было проведено для определения влияния на угол глиссады ошибок положения антенны, ошибок амплитуды и фазы. Тридцать моделирований были выполнены для каждого источника ошибок отдельно, и еще одна серия моделирований была выполнена со всеми источниками ошибок в полевых условиях. Ошибки моделировались как случайные значения с равномерным распределением вероятностей в заданном диапазоне. На приведенных ниже графиках результатов моделирования методом Монте-Карло показан угол возвышения глиссады после применения ошибки по вертикальной оси и номер выборки по горизонтальной оси. Каждая точка представляет результаты одного моделирования со случайной ошибкой. Некоторые графики показывают небольшое смещение данных об угле глиссады. Это результат того, что анализируемая решетка имеет небольшое (несколько сотых градуса) смещение угла глиссады, что не является следствием ошибок чувствительности.
[00210] Некоторые значения чувствительности горизонтальной решетки глиссады обсуждаются ниже.
[00211] Некоторые долговременные ошибки могут включать:
- Положение антенны: Положение в продольном направлении (параллельно взлетно-посадочной полосе) менялось на ±5 мм. Предполагалось, что это допуск установки после корректировки настроек. Ниже также описана процедура настройки начальных продольных ошибок до 20 см между двумя подрешетками.
- Изменение мощности: мощность каждой антенны изменялась индивидуально на ±0,2 дБ. Предполагалось, что мощности CSB и SBO коррелируют, поэтому они изменялись одинаково.
- Изменение фазы: фаза каждой антенны изменялась индивидуально на ±2°. Предполагалось, что фазы CSB и SBO коррелируют, поэтому они изменялись одинаково.
[00212] Фиг. 38 иллюстрирует эффекты долговременной ошибки положения антенны горизонтальной решетки согласно некоторым вариантам осуществления. Фиг. 39 иллюстрирует эффекты долговременной ошибки амплитуды горизонтальной решетки в соответствии с некоторыми вариантами осуществления. Фиг. 40 иллюстрирует эффекты долговременной ошибки фазы горизонтальной решетки в соответствии с некоторыми вариантами осуществления. Фиг. 41 иллюстрирует эффекты комбинированной долговременной ошибки горизонтальной решетки согласно некоторым вариантам осуществления.
[00213] Чувствительность к кратковременным влияниям.
[00214] Некоторые кратковременные ошибки могут включать:
- Положение антенны: Положение в продольном направлении (параллельно взлетно-посадочной полосе) менялось на ±5 мм. Предполагалось, что это динамическое изменение от ветра.
- Изменение мощности: мощность каждой антенны изменялась индивидуально на ±0,1 дБ. Предполагалось, что мощности CSB и SBO коррелируют, поэтому они изменялись одинаково.
Изменение фазы: фаза каждой антенны изменялась индивидуально на ±1°. Предполагалось, что фазы CSB и SBO коррелируют, поэтому они изменялись одинаково.
[00215] На фиг. 42 показаны кратковременные результаты метода Монте-Карло для горизонтальной решетки с эффектами комбинированной краткосрочной ошибки. Они показывает немного меньшее изменение угла глиссады по сравнению с долговременными результатами.
[00216] Некоторые значения чувствительности вертикальной решетки глиссады обсуждаются ниже.
[00217] Некоторые долговременные ошибки могут включать:
- Положение антенны: Положение в продольном направлении (параллельно взлетно-посадочной полосе) менялось на ±5 мм. Предполагалось, что это допуск установки после коррекции настроек.
- Изменение мощности: мощность каждой антенны изменялась индивидуально на ±0,2 дБ. Предполагалось, что мощности CSB и SBO коррелируют, поэтому они изменялись одинаково.
Изменение фазы: фаза каждой антенны изменялась индивидуально на ±2°. Предполагалось, что фазы CSB и SBO коррелируют, поэтому они изменялись одинаково.
[00218] Фиг. 43 иллюстрирует эффекты долговременной ошибки положения антенны вертикальной решетки согласно некоторым вариантам осуществления. Фиг. 44 иллюстрирует эффекты долговременной ошибки амплитуды вертикальной решетки в соответствии с некоторыми вариантами осуществления. Фиг. 45 иллюстрирует эффекты долговременной ошибки фазы вертикальной решетки в соответствии с некоторыми вариантами осуществления. Фиг. 46 иллюстрирует эффекты комбинированной долговременной ошибки вертикальной решетки согласно некоторым вариантам осуществления.
[00219] Чувствительность к кратковременным влияниям.
[00220] Некоторые кратковременные ошибки могут включать:
- Положение антенны: положение в продольном направлении (параллельно взлетно-посадочной полосе) изменялось в пределах ±1,5 см для верхней антенны, 0,75 см для средней и 0,38 см для нижней. Три положения были случайными, но коррелированными, чтобы моделировать мачту, изогнутую ветром.
- Изменение мощности: мощность каждой антенны изменялась индивидуально на ±0,1 дБ. Предполагалось, что мощность CSB и SBO коррелируют, поэтому они изменялись одинаково.
Изменение фазы: фаза каждой антенны изменялась индивидуально на ±1°. Предполагалось, что фазы CSB и SBO коррелируют, поэтому они изменялись одинаково.
[00221] Фиг. 47 иллюстрирует эффекты кратковременной комбинированной ошибки вертикальной решетки согласно некоторым вариантам осуществления.
[00222] Эффекты местности
[00223] Горизонтальные и вертикальные решетки антенны глиссады, анализируемые для этой программы, являются решетками без формирования изображения. В отличие от решетки с изображением, они не зависят от отражения от земли для создания надлежащего сигнала в пространстве. Однако они не полностью защищены от эффектов отражений от земли.
[00224] Показанные выше результаты моделирования также включают эффекты отражений от земли, но можно предположить, что земля представляет собой идеально плоскую однородную поверхность. Отражения от этой поверхности оказывают минимальное влияние на сигнал в пространстве, в основном влияя только на уровни излучаемой мощности при малых углах возвышения. Неровная поверхность перед антеннами может повлиять на отражения и, возможно, изменить сигнал в пространстве.
[00225] Точное моделирование влияния неровности земли на сигнал в пространстве для этих решеток глиссады является трудным и сложным. Показанные здесь результаты являются предварительными и могут оказаться чрезмерно пессимистичными по мере уточнения имитационных моделей.
[00226] Моделирования могут выполняться для определения влияния неровности местности на DDM. Для упрощения вычислений можно взять синусоидальную высоту для земли в двух измерениях, модифицированную случайным образом.
[00227] Профиль земли может быть вычислен следующим образом:  где
где
- Zground: Профиль земли.
- Н: максимальный профиль местности.
- I: расстояние до решетки антенны.
- CL: длина когерентности.
- g: случайный параметр, который позволяет моделировать различную землю для каждого элемента антенны.
[00228] Влияние местности на горизонтальную решетку обсуждается ниже.
[00229] Фиг. 48A-D иллюстрируют эффекты горизонтальной решетки при неровности земли согласно некоторым вариантам осуществления. DDM при угле возвышения 3° (угол глиссады) и 2,3° и 3,7° (края сектора глиссады) показаны на фиг. 38A-D для различных значений Н (высота пика местности, т.е. мера неровности) в метрах и CL (длина когерентности, т.е. мера расстояния между пиками) в метрах. Фиг. 48А иллюстрирует изменение DDM при разных случайных поверхностях земли с неровностью (Н), равной 0,1 м, и длиной когерентности (CL), равной 2 м. Фиг. 48В иллюстрирует изменение DDM при разных случайных поверхностях земли с неровностью (Н), равной 0,1 м, и длиной когерентности (CL), равной 10 м. Фиг. 48С иллюстрирует изменение DDM при разных случайных поверхностях земли с неровностью (Н), равной 0,2 м, и длиной когерентности (CL), равной 2 м. Фиг. 48D иллюстрирует изменение DDM при разных случайных поверхностях земли с неровностью (Н), равной 0,2 м, и длиной когерентности (CL), равной 10 м. Для каждого случая показаны сто выборок моделирования. Отметим, что наибольшие уходы DDM происходили при большей высоте неровности и меньшей длине когерентности.
[00230] Влияние местности на вертикальную решетку обсуждается ниже.
[00231] Фиг. 49A-D иллюстрируют эффекты вертикальной решетки при неровности земли согласно некоторым вариантам осуществления. Вертикальная решетка более чувствительна к неровностям земли, чем горизонтальная решетка. Неровность влияет на ширину траектории, а также на угол глиссады. Фиг. 49А иллюстрирует изменение DDM при разных случайных поверхностях земли с неровностью (Н), равной 0,1 м, и длиной когерентности (CL), равной 2 м. Фиг. 49В иллюстрирует изменение DDM при разных случайных поверхностях земли с неровностью (Н), равной 0,1 м, и длиной когерентности (CL), равной 10 м. Фиг. 49С иллюстрирует изменение DDM при разных случайных поверхностях земли с неровностью (Н), равной 0,2 м, и длиной когерентности (CL), равной 2 м. Фиг. 49D иллюстрирует изменение DDM при разных случайных поверхностях земли с неровностью (Н), равной 0,2 м, и длиной когерентности (CL), равной 10 м.
[00232] Затраты мощности
[00233] Ниже обсуждается анализ мощности передатчика, необходимой для удовлетворения требований покрытия глиссады с горизонтальными и вертикальными решетками.
[00234] Анализ предполагает наличие одного передатчика на антенну. Это означает, что для решетки курсового радиомаяка (8 антенн) и горизонтальной решетки глиссады (10 антенн) требуемая общая мощность распределяется по довольно большому количеству передатчиков. Анализ показывает, что некоторые антенны в вертикальной решетке необходимо заменить двумя или более антеннами, размещенными рядом, чтобы увеличить направленность. В этом случае каждая антенна по-прежнему будет возбуждаться отдельным передатчиком, что приведет к меньшей требуемой мощности передатчика. Необходимое количество антенн зависит от направленности выбранного типа антенны (Вивальди, LDP и т.д.). При анализе затрат мощности предполагалось, что требование покрытия расстояния составляет 10 морских миль (Т) или 20 морских миль (О).
[00235] Оценка горизонтальной решетки глиссады.
[00236] Сигнал в пространстве. Эта решетка способна создавать сигнал в пространстве с настройками угла глиссады от 2,5° до 3,5° с надлежащей шириной (угол возвышения DDM). Диапазон покрытия по азимуту немного превышает ±5°, включая клиренс. Хотя покрытие по азимуту меньше, чем у вертикальной решетки, оно достаточно для того, чтобы решетка прошла полетную проверку в соответствии с ограничениями приказа 8200.1, который измеряет диапазон азимута согласно Приложению «Точка А» конвенции ИКАО (4 морских мили от порогового значения) при заходе на посадку.
[00237] Чувствительность. Приказ 8299.1 FAA конкретизирует отклонение угла глиссады ±0,5° от желаемого или эксплуатируемого угла. Разброс угла глиссады, показанный на фиг. 41, находится в пределах этого отклонения, даже допуская небольшое увеличение, которое может появиться при сотнях моделирований. Из-за большого расстояния (120 м - 160 м) между двумя подрешетками поддержание точной синхронизации для этой решетки является сложной задачей. Мы разработали процедуру настройки с использованием дрона, который может посредством электроники корректировать ошибки продольного положения до 20 см. Показано, что чувствительность к кратковременным ошибкам, вызывающим изгибы траектории захода на посадку, несколько меньше, чем долговременная чувствительность. Кратковременное изменение DDM находится в пределах структурных ограничений Приказа 8200.1 FAA ±0,21° (±45 мкА).
[00238] Упаковка: Упаковка 10 антенн и их поддерживающих конструкций в небольшом объеме является сложной задачей. Несколько типов антенн (LPD, диполь, Вивальди) находятся на стадии исследования зависимости упаковочного размера от электрических характеристик. Каждая 5-элементная подрешетка (передняя и задняя) смонтирована на единой телескопической конструкции.
[00239] Установка: опорная точка устанавливается на стороне взлетно-посадочной полосы, противоположной точке приземления. Местоположение каждой подрешетки отмечается относительно опорной точки с использованием геодезического тахеометра, который, по сути, представляет собой комбинированный цифровой теодолит и лазерный дальномер, обеспечивающие угловую точность до угловых секунд и точность дальности до миллиметра. Физическая компоновка одинакова, независимо от назначенной частоты и угла глиссады, которые регулируются электронно. Расстояние между подрешетками не критично, но подрешетки должны быть перпендикулярны взлетно-посадочной полосе с точностью до сантиметра.
[00240] Характеристики на пересеченной местности. Предварительные моделирования показывают, что на сигнал в пространстве для этой решетки слабо влияет неровность земли, за исключением случая, когда Н=0,2 м, CL=2 м. Необходима дальнейшая работа, чтобы оценить, насколько реалистичны эти результаты. На фиг. 50 показаны области отражения для горизонтальной решетки. Земля в этих областях должна быть достаточно гладкой. В настоящее время трудно дать «разумную» количественную оценку. Отражения от земли за пределами этих областей не влияют на сигнал в пространстве в пределах общего объема пространства для захода на посадку, определяемого границами сектора курсового радиомаяка и глиссадного радиомаяка. По горизонтальной оси на фигуре отложено продольное расстояние в метрах от решетки антенны, а вертикальная ось представляет собой поперечное расстояние от центральной линии взлетно-посадочной полосы. Смещение антенны предполагалось равным 40 метрам.
[00241] Затраты мощности: Эта решетка требует большей мощности передатчика, чем обычная нулевая эталонная решетка глиссады с изображением, но при той же мощности она по-прежнему создает сигнал в пространстве, который удовлетворяет требованиям покрытия.
[00242] Оценка вертикальной решетки
[00243] Сигнал в пространстве. Эта решетка способна создавать сигнал в пространстве с настройками угла глиссады от 2,5° до 3,5° с надлежащей шириной (угол возвышения DDM). Диапазон азимута ограничен только диаграммой направленности элементов антенны, поэтому теоретически он составляет 360° для всенаправленных антенн.
[00244] Чувствительность. Приказ 8299.1 FAA конкретизирует отклонение угла глиссады ±0,5° от желаемого или эксплуатируемого угла. Долговременный разброс угла глиссады, показанный на фиг. 46, находится в пределах этого отклонения, даже допуская небольшое увеличение, которое может появиться при сотнях моделирований. Чувствительность этой решетки к кратковременным изменениям положения антенны, изменениям мощности и фазы, показанная на фиг. 47, вполне соответствует требованиям, даже если допускается смещение верхней антенны на 1,5 см при изгибе мачты при сильном ветре.
[00245] Упаковка: Эта решетка подходит для компактной упаковки, включая складную мачту плюс только три элемента антенны (хотя некоторые антенны могут быть сдвоены, но все же смонтированы на единой мачте).
[00246] Установка: Только один компонент этой решетки (мачта) должен быть точно размещен на площадке. Высота трех антенн должна контролироваться в пределах отклонений в 1 см. Физическая компоновка одинакова, независимо от назначенной частоты и угла глиссады, которые регулируются электронно посредством блоков ARU.
[00247] Характеристики на пересеченной местности. Предварительные моделирования показывают, что на сигнал в пространстве для этой решетки слабо влияет неровность земли, за исключением случая, когда Н=0,2 м, CL=2 м. Необходима дальнейшая работа, чтобы оценить, насколько реалистичны эти результаты. На фиг. 51 показана область отражения для вертикальной решетки. Земля в этой области должна быть достаточно гладкой. В настоящее время трудно дать «разумную» количественную оценку. Отражения от земли за пределами этой области не влияют на сигнал в пространстве в пределах общего объема пространства для захода на посадку, определяемого границами сектора курсового радиомаяка и глиссадного радиомаяка. По горизонтальной оси на фигуре отложено продольное расстояние в метрах от решетки антенны, а вертикальная ось представляет собой поперечное расстояние от центральной линии взлетно-посадочной полосы. Смещение антенны предполагалось равным 40 метрам.
[00248] Затраты мощности: анализ затрат мощности показал, что во избежание больших и тяжелых блоков ARU может потребоваться монтаж 2 или более антенн в ряд на мачте для увеличения направленности решетки. В этом случае каждая антенна будет возбуждаться отдельным передатчиком.
[00249] Сравнение
[00250] В таблице 3 показано сравнение характеристик горизонтальной и вертикальной решетки глиссады согласно некоторым вариантам осуществления. В таблице 3 показана относительная прочность горизонтальной и вертикальной решеток глиссады, где «+» указывает на лучшие характеристики, «-» указывает на худшие характеристики и «0» указывает на равные характеристики с другой решеткой.
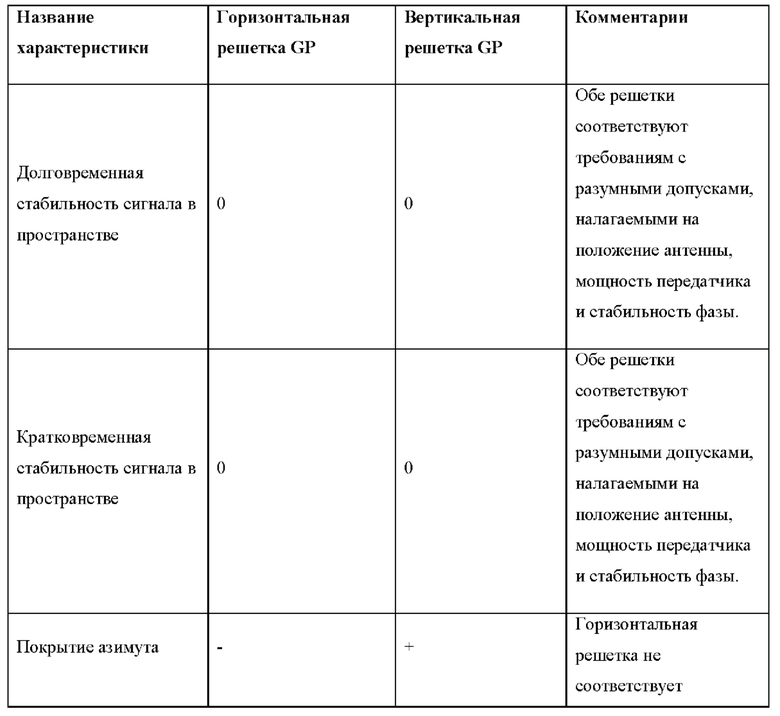


[00251] Примеры компромисса
[00252] В таблице 4 показаны компромиссные решения решетки антенны курсового радиомаяка и глиссады согласно некоторым вариантам осуществления.


[00253] Выводы
[00254] 8-элементная решетка курсового радиомаяка обеспечивает сигнал в пространстве, соответствующий Приложению 10 конвенции ИКАО. Была разработана телескопическая опорная конструкция, которая складывается в компактный объем для транспортировки и может быть быстро установлена. Настройка может быть выполнена полностью электронным способом (без обрезки кабеля или регулировки положения антенны) при поддержке дрона, выполняющего измерения сигнала в пространстве. Дрон также может выполнять некоторые критические измерения для полетной проверки.
[00255] Горизонтальная решетка глиссады создает сигнал в пространстве, соответствующий Приложению 10 конвенции ИКАО, за исключением покрытия по азимуту. Тем не менее, его покрытие по азимуту достаточно для выполнения требований Приказа 8200.1 FAA к полетным проверкам. Две телескопические опорные конструкции складываются в компактный объем для транспортировки и могут быть быстро установлены. Настройка может быть выполнена полностью электронно (без обрезки кабеля или регулировки положения антенны) при поддержке дрона, выполняющего измерения сигнала в пространстве. Дрон также может выполнять некоторые критические измерения для полетной проверки.
[00256] Вертикальная антенна глиссады создает сигнал в пространстве, соответствующий Приложению 10 конвенции ИКАО, включая требование покрытия по азимуту. Телескопическая мачта складывается в компактный объем для транспортировки и может быть быстро выдвинута. Настройка может быть выполнена полностью электронно (без обрезки кабеля или регулировки положения антенны) при поддержке дрона, выполняющего измерения сигнала в пространстве. Некоторые антенны, возможно, потребуется удвоить или утроить для достижения достаточного запаса мощности, в зависимости от выбранного типа элемента антенны.
[00257] Покрытие и затраты мощности
[00258] Далее описываются производные требования в различных вариантах осуществления. Некоторые варианты осуществления связаны с анализом оценки мощности передачи ARU, необходимой для достижения требуемого покрытия системами курсового радиомаяка и глиссады.
[00259] Покрытие также зависит от геометрии решетки и от элементов антенны, которые являются новыми для GP и LOC.
[00260] Анализ выполняется с использованием двух подходов:
a) практическое сравнение с текущими системами;
b) теоретическое сравнение с требованиями.
[00261] Курсовой радиомаяк
[00262] Подход 1: Практическое сравнение с текущей системой.
[00263] Мощность передатчика ARU, подключенного к центральным антеннам (1R и 1L), вычисляется для достижения той же интенсивности поля, что и в текущей системе при максимальной мощности. На фиг. 52 показана конфигурация текущей системы и системы PILS. На этой фигуре коэффициент усиления азимутальной решетки (приблизительно 9,5 дБ) не учитывается, поскольку эти две решетки одинаковы.
[00264] Приемник при азимуте =0°, расстояние 46000, высота 600 м (возвышение 0,75°):
- Текущая система: 8 антенн LPD, hANT =3 м:
коэффициент усиления элемента = +10 дБ
коэффициент усиления элемента = 20*log
[2*sin(2π/λ*hANT*sin(0,75°))]=-15 дБ
- Система PILS: 8 антенн Н-диполь, hANT = 2 м:
коэффициент усиления элемента = +5 дБ
коэффициент усиления элемента = 20*log
[2*sin(2π/λ*hANT*sin(0,75°))]=-18,5 дБ
[00265] Когда элементы Н-диполя (G=5 дБ) используются вместо элемента LPD (G=10 дБ) и они опускаются до 2 м по отношению к типичной высоте 3 м (больше потерь по углу возвышения на 3,5 дБ), общий коэффициент усиления антенны системы PILS на 8,5 дБ ниже, чем в традиционной системе над удлиняющейся центральной линией.
[00266] Если система PILS должна гарантировать ту же интенсивность поля, что и традиционная система (где максимальная мощность несущей на центральных антеннах составляет 3 Вт), то максимальная мощность несущей блоков ARU, подключенных к центральным антеннам (1R и 1L), должна быть на 8,5 дБ выше, т.е. приблизительно 20 Вт, что неприемлемо.
[00267] Одним из преимуществ системы PILS должна быть компактность и малый вес блоков ARU, которые не могут быть достигнуты при такой передаваемой мощности. Поэтому важно оценить реальный запас текущей системы для поиска возможности снижения общей мощности передатчика с новыми антеннами.
[00268] Подход 2: Теоретическое сравнение с требованиями.
[00269] Значение интенсивности поля вычисляется, когда мощность передачи ARU на центральных антеннах составляет 20 Вт, для оценки теоретического запаса по отношению к требованиям покрытия конвенции ИКАО.
Требования: плотность мощности дБВт/м2 в двух значащих точках:
a. При расстоянии = 46000 м (25 морских миль), высота = 600 м (т.е. 9=0,75°), азимут = 0°
b. При расстоянии = 31000 м (17 морских миль), высота = 600 м (т.е. возвышение = 1,1°), азимут = 35°
Вычисление:
Плотность мощности = МОЩНОСТЬ ТХ - ПОТЕРИ В СВОБОДНОМ ПРОСТРАНСТВЕ + КОЭФФИЦИЕНТ УСИЛЕНИЯ АНТЕННЫ
где
МОЩНОСТЬ ТХ = 20 Вт = +13 дБВт
ПОТЕРИ В СВОБОДНОМ ПРОСТРАНСТВЕ = 10*log (4πR2) зависят от расстояния R:
a. при R = 46000 м потери +104 дБ/м2
b. при R = 31000 м потери +100,5 дБ/м2
КОЭФФИЦИЕНТ УСИЛЕНИЯ АНТЕННЫ = коэффициент усиления элемента + коэффициент усиления решетки + коэффициент усиления возвышения
• коэффициент усиления элемента в основном зависит от азимута приемника Ф:
a. при Ф=0° коэффициент усиления +5 дБ
b. при Ф=35° коэффициент усиления +1 дБ
• коэффициент усиления решетки в основном зависит от азимута приемника Ф:
a. при Ф=0° коэффициент усиления +9,5 дБ
b. при Ф=35° коэффициент усиления -3,5 дБ
• коэффициент усиления возвышения зависит от возвышения приемника θ: (20*log(
[2*sin(2π/λ*hANT*sinθ)))
a. при θ=0,75° коэффициент усиления -18,5 дБ
b. при θ=1,1° коэффициент усиления -15 дБ
Определено:
a. При расстоянии = 46000 м (25 морских миль), высота = 600 м (т.е. θ=0,75°), азимут = 0°
Плотность мощности = +13 Вт - 104 дБ/м2+5+9,5-18,5 дБ=-95 дБВт/м2
b. При расстоянии = 31000 м (17 морских миль), высота = 600 м (т.е. возвышение = 1,1°), азимут = 35°
Плотность мощности = +13 дБВт - 100,5 дБ/м2+1-3,5-15 дБ=-105 дБВт/м2
[00270] Фиг. 53 представляет собой график диаграммы CSB курсового радиомаяка с 8 элементами, иллюстрирующий изменение амплитуды в зависимости от угла азимута. При мощности передатчика 20 Вт запас по отношению к требованию составляет приблизительно 20 дБ на расстоянии 25 морских миль в пределах сектора курса и приблизительно 10 дБ на расстоянии 17 морских миль на границе клиренса.
[00271] Если запас снизится до 10 дБ на секторе курса и до 0 дБ на границе клиренса (чего можно достигнуть, слегка изменив диаграмму направленности), мощность несущей, требуемая на центральных антеннах, может быть снижена до 2 Вт, что является более разумным значением.
[00272] Глиссада (горизонтальная версия)
[00273] Подход 1: Практическое сравнение с традиционной системой.
[00274] Мощность передатчика ARU, подключенного к центральным антеннам (F3 и R3), вычисляется для достижения той же интенсивности поля, что и в текущей системе при максимальной мощности. На фиг. 54 показана конфигурация традиционной системы и горизонтальной системы PILS.
[00275] Приемник при возвышении = 3°, расстоянии 18500 м (10 морских миль), азимуте = 0°:
- Традиционная (нулевая эталонная) система: 2 вертикальные антенны компании Kathrein (антенна CSB h=4,3 м):
коэффициент усиления элемента = +10 дБ
коэффициент усиления решетки (только за счет изображения) = +6 дБ
- Система PILS: 10 горизонтальных антенн Вивальди (с h=1,5 м):
коэффициент усиления элемента = +3 дБ
коэффициент усиления массива = +14 дБ
[00276] Если выбрана горизонтальная решетка (G=14 дБ вместо 6 дБ вертикальной решетки) и используются элементы Вивальди (G=3 дБ вместо 10 дБ элементов компании Kathrein), общий коэффициент усиления антенны системы PILS будет на 1 дБ выше при типичном угле возвышения (3°).
[00277] Если система PILS должна гарантировать ту же интенсивность поля, что и традиционная система (где максимальная мощность несущей на антенне CSB составляет 4 Вт), то максимальная мощность несущей блоков ARU, подключенных к центральным антеннам (F3 и R3), должна быть на 1 дБ ниже, т.е. приблизительно 3,2 Вт, что неприемлемо.
[00278] На самом деле, также необходимо учитывать мощность клиренса для покрытия диапазона азимута, для которого требуется удвоенная общая мощность передатчика (6,5 Вт), что слишком много, если мы хотим спроектировать легкие по весу блоки ARU (следует учитывать, что, поскольку для GP общая амплитудная модуляция составляет 80%, пиковая мощность почти в четыре раза превышает мощность несущей). Поэтому важно оценить реальный запас традиционной системы для поиска возможности снижения общей мощности передатчика с новыми антеннами.
[00279] Подход 2: Теоретическое сравнение с требованиями.
[00280] Значение интенсивности поля вычисляется, когда мощность передачи ARU на центральных антеннах составляет 3,2 Вт, для оценки теоретического запаса по отношению к требованиям покрытия конвенции ИКАО.
Требования: плотность мощности = -95 дБ Вт/м2 в двух значащих точках:
a. При расстоянии = 18500 м (10 морских миль), возвышение = 3°
b. При расстоянии = 18500 м (10 морских миль), возвышение = 0,9°
Вычисление:
Плотность мощности = МОЩНОСТЬ ТХ - ПОТЕРИ В СВОБОДНОМ ПРОСТРАНСТВЕ + КОЭФФИЦИЕНТ УСИЛЕНИЯ ЭЛЕМЕНТА + КОЭФФИЦИЕНТ УСИЛЕНИЯ РЕШЕТКИ, где
МОЩНОСТЬ ТХ = 3,2 Вт = +5 дБВт
ПОТЕРИ В СВОБОДНОМ ПРОСТРАНСТВЕ = 10*log(4πR2)=96,3 дБ/м2 на расстоянии = 18500 м
КОЭФФИЦИЕНТ УСИЛЕНИЯ ЭЛЕМЕНТА = +3дБ (Вивальди, равномерный во всем угловом секторе глиссады)
КОЭФФИЦИЕНТ УСИЛЕНИЯ РЕШЕТКИ зависит от возвышения приемника θ:
a. при θ=3° коэффициент усиления +14 дБ
b. при θ=0,9° коэффициент усиления 0 дБ
[00281] Определено:
a. при возвышении = 3°, Плотность мощности = +5 дБВт - 96,3 дБ/м2+3+14 дБ=-74,3 дБВт/м2
b. при возвышении = 0,9°, Плотность мощности = +5 дБВт - 96,3 дБ/м2+3+0 дБ=-88,3 дБВт/м2
[00282] Фиг. 55 представляет собой график, иллюстрирующий диаграмму CSB глиссады. При мощности передатчика 3,2 Вт запас по отношению к требованию составляет приблизительно 20 дБ при типичном угле глиссады и приблизительно 7 дБ при наименьшем угле возвышения.
[00283] Если запас снизится до 15 дБ при 3° и до 2 дБ при 0,9°, мощность несущей, требуемая на центральных антеннах, может быть снижена до 1 Вт (курс) +1 Вт (клиренс), что являются более разумными значениями.
[00284] Глиссада (вертикальная версия: h=1 м, 3,5 м, 6 м)
[00285] Коэффициент усиления решетки вертикальной версии (+2 дБ) намного ниже, чем у горизонтальной версии (+14 дБ), из-за меньшего количества антенн и особенного распределения мощности и фазы сигнала CSB. Следовательно, если вместо антенны компании Kathrein (10 дБ) также используются антенны Вивальди (3 дБ), мощность передатчика ARU, подключенного к средней антенне, должна составлять 50 Вт для достижения той же интенсивности поля, что и с традиционной (также называемой текущей) системы на максимальной мощности. Фиг. 56 иллюстрирует традиционную систему, горизонтальную систему PILS в соответствии с некоторыми вариантами осуществления, и вертикальную систему PILS в соответствии с некоторыми вариантами осуществления.
[00286] Это неприемлемо для большинства требований, следовательно, необходимо мультиплицировать передатчики или лучше антенны.
[00287] Если четыре элемента смонтированы на средней высоте антенны (и, в конечном итоге, только два для нижней и верхней антенн, которые требуют меньшей мощности CSB), то азимутальная направленность увеличивается на 12 дБ (за счет бокового покрытия, которое не является проблемой для больших значений азимута), а мощность передатчика может быть снижена до 3 Вт или до 2 Вт, если приемлемы допустимые потери только в 2 дБ по отношению к нулевому эталону. Фиг. 57 иллюстрирует вертикальную систему PILS согласно некоторым вариантам осуществления.
[00288] Сигналы отдельных антенн ориентируют таким образом, чтобы глубина демодуляции между сигналами 90 Гц и 150 Гц стала равной нулю вокруг номинальной глиссады. На верхнюю антенну подают сигнал SBO 90 Гц и 150 Гц с первым максимумом при 1,5° и нулем при 3°. Глубина модуляции обычно составляет 0,4 для GP и 0,2 для LOC для каждого из сигналов модуляции 90 Гц и 150 Гц соответственно на центральной линии и под углом GP, где две глубины модуляции равны.
[00289] Разница в глубине демодуляции (DDM) представляет собой сигнал, используемый летательным аппаратом для управления заходом на посадку. При центрировании по траектории посадки разница между сигналом модуляции 90 Гц и сигналом модуляции 150 Гц равна нулю. Только при уходе с номинального курса она становится отличной от нуля из-за преобладания 90 Гц слева (LOC) или выше (GP) и 150 Гц справа (LOC) или ниже (GP).
[00290] Сумма глубины демодуляции обычно составляет 0,8 или 80% для GP и 0,4 или 40% для LOC, поскольку она представляет собой сумму модуляции 90 Гц и 150 Гц, когда отцентрирована. SDM может отличаться от номинального значения из-за отказа передатчика или при переходе курс-клиренс, или из-за непредвиденных полевых эффектов. Поскольку сумма отлична от нуля, она лучше подходит в качестве контрольного сигнала, когда отцентрирована на номинальной траектории. В стороне от номинальной траектории как SDM, так и DDM не равны нулю и подходят в качестве контрольного входного сигнала. На номинальной траектории SDM=80% для GP (и 40% для LOC) и DDM=0%, в стороне от номинальной траектории SDM по-прежнему составляет 80% или 40%, а DDM не равен 0%. На номинальной траектории DDM более важен, чем SDM, как контрольный сигнал.
[00291] В некоторых вариантах осуществления решетка глиссады содержит одну из нулевой эталонной решетки и решетки глиссады гл-типа. Например, нулевая эталонная GP использует две вертикально расположенные антенны. На нижнюю антенну подают опорный сигнал CSB, одинаково модулированный тонами 90 Гц и 150 Гц. Поверхность земли используется в качестве поверхности изображения (виртуально четыре антенны обеспечивают сигнал GP). Вместе с антенной с изображением получается поле с первым максимумом при 3° и первым нулевым значением при 6° (дополнительные максимумы и минимумы за этими пределами).
[00292] В другом примере, GP М-типа (эффект захвата) представляет собой тип GP с изображением, подобный нулевому эталонному типу. Однако он несколько менее чувствителен к местности по сравнению с нулевым эталонным типом. В GP М-типа используются три вертикально расположенных элемента антенны. Все антенны возбуждаются сигналом SBO. Нижняя и средняя антенны также возбуждаются сигналом CSB. Сигналы SBO для верхней и нижней антенн имеют отрицательный угол фазы, тогда как SBO для средней антенны имеет сдвиг фазы +180°, при этом амплитуда больше. CSB для средней антенны имеет номинальную амплитуду и не имеет сдвига фазы, в то время как CSB для нижней антенны имеет увеличенную амплитуду и сдвиг фазы +180°. Полученное поле после пространственной модуляции приводит к уменьшению размеров отображаемой поверхности.
[00293] Глиссада с элементами LPD (как горизонтальная, так и вертикальная версия)
[00294] В предыдущих разделах в качестве элемента для решетки рассматривалась антенна Вивальди (которая имеет коэффициент усиления 3 дБ, включая потери в фидере и кабеле). Эта антенна имеет смоделированную направленность приблизительно 5 дБ, что соответствует коэффициенту усиления, равному 3 дБ, если также принять во внимание потери в фидере (1,5 дБ) и потери в кабеле (0,5 дБ).
[00295] В случае использования элемента LDP (используемого в системе Thales GP12) благодаря его большей направленности (9 дБ) мощность, требуемая для блоков ARU, ниже. При потерях 2 дБ коэффициент усиления элемента составляет 7 дБ. Следовательно, мощность передачи приблизительно на 4 дБ ниже:
- для горизонтальной решетки: менее 0,5 Вт для курса +0,5 Вт для клиренса;
- для вертикальной решетки: менее 1 Вт или, альтернативно, 2 Вт с 4 антеннами вместо 8 антенн.
[00296] Регулировка ошибки положения горизонтальной решетки
[00297] Когда две группы решеток (расстояние более 100 м) размещены с большой статической ошибкой (до 20 см) вдоль направления взлетно-посадочной полосы, угол GP можно скорректировать путем регулировки фазы передатчиков, как показано на фиг. 58, в соответствии с некоторыми вариантами осуществления.
[00298] Теоретическое объяснение
[00299] Далее следует краткое пояснение, почему коррекция возможна. Принцип работы горизонтальной GP заключается в том, что передняя группа и задняя группа излучают два сигнала SBO, которые находятся в противофазе только при угле GP, создавая нулевой DDM при этом угле. Этого можно достичь, например, если расстояние между двумя решетками кратно половине длины волны, деленной на cos(3°), а передатчики SBO находятся в фазе. Фактически, в этом случае два сигнала, поступающие от двух решеток, достигают приемника в противоположных фазах (как показано на фиг. 59, верхний чертеж для «без ошибки»).
[00300] Теперь, если расстояние не точно соответствует номинальному значению, при 3° два луча, выходящие из двух решеток, достигают приемника со смещением фазы Лу, которое можно легко компенсировать путем расфазировки передатчиков двух групп посредством одного и того же количества фаза -Δψ (как показано на верхнем чертеже на фиг. 59 для «ошибка»).
[00301] Пример смещения ±10 см с решеткой (5+5).
[00302] Следующие графики относятся к системе, состоящей из двух 5-элементных решеток, удаленных приблизительно на 120 м и смещенных на 40 м от центральной линии, но применяются те же соображения в зависимости от того, какое расстояние между двумя группами, например 160 м.
a) При рабочей частоте 332 МГц расстояние между двумя решетками должно быть
D=(2×66+1)*с/f/cos(3°)=121,16 м
[00303] В этих идеальных условиях (без ошибок) DDM равен нулю при 3°, как показано на графике фиг. 60.
b) Если две группы смонтированы с ошибкой 10 см в направлении взлетно-посадочной полосы
D'=121,16 м+10 см
DDM равен нулю при 3,8° вместо 3°. В случае, если новое расстояние не может быть точно измерено, положение нуля указывает направление и величину ошибки смещения, как поясняется ниже и показано на графиках фиг. 61.
c) При применении коррекции фазы Δψ к SBO задней группы (а также к сигналу CSB для поддержания симметрии по ширине)
Δψ (SBO)=+40°
DDM равен нулю при 3°, как это необходимо. Коррекция фазы пропорциональна ошибке положения, как следует из теоретического объяснения (соответствующего Δψ=360*Δd/λ) и объясненного ниже. Это значение может быть применено непосредственно, если известна ошибка положения, в противном случае необходима итерационная процедура для нахождения условия нуля DDM при эксплуатационном угле GP. Однако эта процедура все равно необходима, так как фактический угол GP может отличаться от теоретического значения из-за поведения реальной окружающей среды. Фиг. 62 иллюстрирует график DDM для глиссады.
d) Наоборот, если ошибка положения в противоположном направлении (т.е. группы ближе)
D'=121,16 м-10 см
угол нуля DDM составляет 1,9°, меньше 3°, а не больше 3° (но разница по величине не такая как в предыдущем случае). Фиг. 63 иллюстрирует DDM для глиссады согласно некоторым вариантам осуществления.
А коррекция фазы должна быть применена в противоположном направлении (с той же величиной, что и в предыдущем случае)
Δψ (SBO)=-40°
[00304] Резюме
[00305] Вышеприведенный пример показывает, что, если ошибка положения неизвестна, предварительное измерение угла, где DDM равен нулю, дает очень хорошую индикацию знака и величины коррекции фазы SBO, которая должна быть применена. Эти знания могут минимизировать время, необходимое для точной регулировки угла GP, начиная с условий, очень далеких от желаемых.
[00306] Фактически, нижеследующая таблица 5 обобщает, для каждого значения ошибки начального положения, угол при котором DDM равен нулю, и какое значение фазы SBO (и CSB) необходимо применить для достижения нуля DDM при 3°.

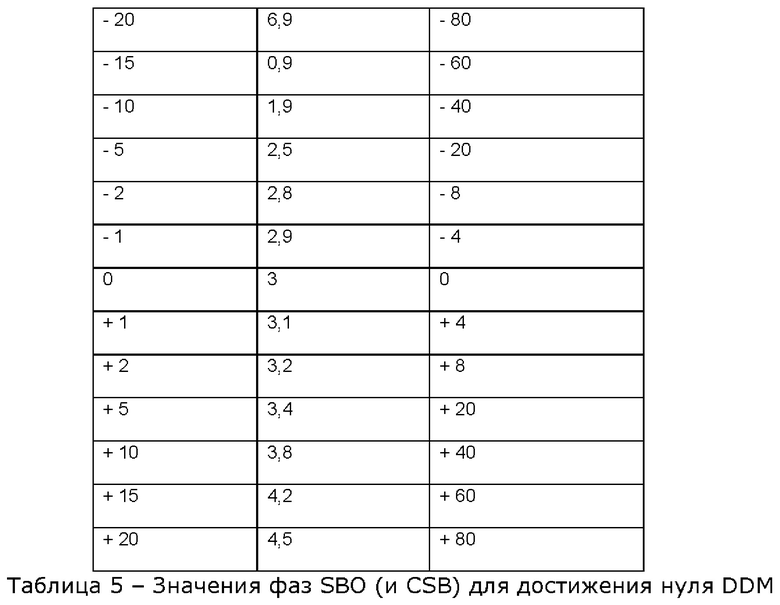
[00307] Коррекция фазы линейно пропорциональна ошибке положения, в то время как угол нуля DDM пропорционален, но не точно линеен. Кроме того, в случае, если две группы находятся ближе теоретического значения более чем на 15 см, нуль DDM падает ниже 0°, поэтому условие нуля DDM необходимо искать во втором «нуле SBO» выше 6°, что может быть практически затруднительно. Фиг. 64 иллюстрирует приведенную для примера ошибку положения передней группы по отношению к задней группе в сантиметрах.
[00308] Наконец, можно легко продемонстрировать, что фиксированное положение всех антенн (с надлежащей точностью и стабильностью, определенными в других документах) дает возможность создавать адекватный сигнал в пространстве для любой частоты (от 328,6 МГц до 335,4 МГц) и для любого угла глиссады (от 2,5° до 3,5°).
[00309] Фактически, после того, как положения антенн были зафиксированы, можно отрегулировать эксплуатационный угол глиссады на рабочей частоте объекта, просто выбрав наиболее подходящую фазу (SBO и CSB, передний и задний) передатчиков, которые программируются в полевых условиях.
[00310] Определенные значения, однажды проверенные в полевых условиях на первых прототипах, затем могут быть сохранены в EEPROM (либо блока управления, либо блоков ARU) в зависимости от частоты и эксплуатационного угла.
[00311] Затем эти значения будут использоваться в качестве отправной точки процедуры настройки в полевых условиях, которая в любом случае требуется для точной настройки сигнала в пространстве в конкретной окружающей среде.
[00312] Механические конструкции курсового радиомаяка и глиссады
[00313] В некоторых вариантах осуществления в курсовом радиомаяке и глиссаде используются механические конструкции, удерживающие отдельные антенны, причем блоки ARU расположены близко к антеннам и CU так, что элементы предварительно подключены кабелями. Например, механическая конструкция удерживает все части, включая антенны, блоки ARU и CU. Блоки ARU расположены рядом с антенной, которую возбуждает ARU, или непосредственно связаны с ней. Все элементы конструкции предварительно снабжены кабелями, поэтому при транспортировке нет необходимости снимать кабели с конструкции. Сама механическая конструкция спроектирована из легких материалов с использованием нескольких вложенных коротких ферменных рам, ширина которых снижается от центра к краям всей конструкции. Ферменную раму можно компактно сложить для транспортировки, сдвинув вместе короткие элементы фермы, и извлечь на месте, вытащив их. Извлекаемая и выдвижная конструкция обеспечивает очень малое время установки и демонтажа.
[00314] Ферменная рама сконструирована таким образом, чтобы ее элементы разрушались при ударе с чрезмерной силой для обеспечения хрупкости. Ферменная рама спроектирована так, чтобы быть жесткой в пределах всех сил в нормальном рабочем диапазоне, включая ветровые нагрузки. Жесткость обеспечивает достаточно малое изменение центров фаз отдельных антенн так, что разница между центрами фаз отдельных антенн в направлении вдоль взлетно-посадочной полосы меньше максимально допустимой для обеспечения синхронизации несущей (например, 5 мм).
[00315] Антенны LOC и GP смонтированы на ферменной раме на опорах с соединениями, позволяющими им складываться для транспортировки. Кроме того, антенны смонтированы на регулируемых направляющих, позволяющих регулировать положение вдоль взлетно-посадочной полосы. Опоры состоят из вложенных друг в друга труб, прикрепленных к ферменной раме, и позволяют регулировать высоту антенны по вертикали. Механическая регулировка положений антенн выполняется для снижения пространства поиска для электронной калибровки синхронизации отдельных сигналов LOC и GP.
[00316] Дополнительные определения и варианты осуществления поясняются ниже.
[00317] В приведенном выше описании различных вариантов осуществления идей настоящего изобретения следует понимать, что используемая здесь терминология предназначена только для задач описания конкретных вариантов осуществления и не предназначена для ограничения идей настоящего изобретения. Если не указано иное, все используемые здесь термины (включая технические и научные термины) имеют то же значение, которое обычно понимается специалистом в области техники, к которой относятся изложенные идеи изобретения. Кроме того, следует понимать, что термины, такие как те, которые определены в обычно используемых словарях, должны интерпретироваться как имеющие значение, которое согласуется с их значением в контексте данного описания и соответствующей области техники, и не должны интерпретироваться в идеализированном или чрезмерно формальном смысле, как прямо определенно здесь.
[00318] Когда элемент упоминается как «подключенный», «связанный», «реагирующий» или их варианты по отношению к другому элементу, он может быть непосредственно подключен, связан с другим элементом или реагировать на него, или могут присутствовать промежуточные элементы. Напротив, когда элемент упоминается как «непосредственно подключенный», «непосредственно связанный», «непосредственно реагирующий» или их варианты по отношению к другому элементу, промежуточные элементы отсутствуют. Подобные числа относятся к одинаковым элементам повсюду. Кроме того, термины «связанный», «подключенный», «реагирующий» или их варианты, используемые здесь, могут включать «связанный беспроводным образом», «подключенный беспроводным образом» или «реагирующий беспроводным образом». Используемые здесь единственное число предназначено также для включения множественного числа, если в контексте явно не указано иное. Хорошо известные функции или конструкции могут не описываться подробно для краткости и/или ясности. Термин «и/или» включает любые и все комбинации одного или более связанных перечисленных элементов.
[00319] Следует понимать, что, хотя термины «первый», «второй», «третий» и т.д. могут использоваться в данном документе для описания различных элементов/операций, эти элементы/операции не должны ограничиваться этими терминами. Эти термины используются только для того, чтобы отличить один элемент/операцию от другого элемента/операции. Таким образом, первый элемент/операция в некоторых вариантах осуществления может называться вторым элементом/операцией в других вариантах осуществления, не выходя за рамки идей настоящего изобретения. Одни и те же ссылочные позиции или одни и те же ссылочные обозначения относятся к одним и тем же или подобным элементам во всем описании.
[00320] Используемые в настоящем документе термины «содержать», «содержащий», «содержит», «включать», «включающий», «включает», «иметь», «имеет», «имеющий» или их варианты являются открыто завершенными и включают один или более обозначенных признаков, целых чисел, элементов, этапов, схем или функций, но не исключают наличия или добавления одного или более других признаков, целых чисел, элементов, этапов, схем, функций или их групп. Кроме того, используемое в настоящем документе слово «например» может использоваться для введения или конкретизации общего примера или примеров ранее упомянутого элемента и не предназначено для ограничения таких элементов. Обычная аббревиатура «т.е.», происходящая от латинского выражения «id est», может использоваться для обозначения конкретного элемента из более общего чтения.
[00321] Примеры вариантов осуществления описаны здесь со ссылкой на блочные схемы и/или иллюстрации блок-схем реализуемых компьютером способов, устройств (систем и/или устройств) и/или компьютерных программных продуктов. Подразумевается, что блок блочных схем и/или иллюстраций блок-схем, а также комбинации блоков в блочных схемах и/или иллюстрациях блок-схем могут быть реализованы с помощью инструкций компьютерной программы, которые выполняются одной или более компьютерными схемами, реализуемыми аналоговыми схемами и/или гибридными цифровыми и аналоговыми схемами. Инструкции компьютерной программы могут быть предоставлены схеме обработки компьютерной схемы общего назначения, компьютерной схемы специального назначения и/или другой программируемой схемы обработки данных для создания машины, так что инструкции, которые выполняются через схему обработки компьютера и/или другое программируемое устройство обработки данных, транзисторы преобразования и управления, значения, хранящиеся в ячейках памяти, и другие аппаратные компоненты в такой схеме для реализации функций/действий, указанных в блочных схемах и/или блоке (блоках) блок-схем, и тем самым создавать средства (функциональность) и/или структуру для реализации функций/действий, указанных в блочных схемах и/или блоке (блоках) блок-схем.
[00322] Эти инструкции компьютерной программы также могут храниться на материальном компьютерочитаемом носителе, который может направлять компьютер или другое программируемое устройство обработки данных на функционирование определенным образом, так что инструкции, хранящиеся на компьютерочитаемом носителе, создают изделие производства, включающее в себя инструкции, которые реализуют функции/действия, указанные в блочных схемах и/или блоке (блоках) блок-схем. Соответственно, варианты осуществления идей настоящего изобретения могут быть воплощены в аппаратных средствах и/или в программном обеспечении (включая микропрограммное обеспечение, резидентное программное обеспечение, микрокод и т.д.), которое работает на схеме обработки, такой как процессор цифровых сигналов, которые в совокупности могут называться «схемой», «модулем» или их вариантами.
[00323] Следует также отметить, что в некоторых альтернативных реализациях функции/действия, отмеченные в блоках, могут выполняться не в порядке, отмеченном на блок-схемах. Например, два блока, показанные последовательно, фактически могут выполняться по существу одновременно, или иногда блоки могут выполняться в обратном порядке, в зависимости от задействованных функциональных возможностей/действий. Более того, функциональные возможности данного блока блок-схем и/или блочных схем могут быть разделены на несколько блоков, и/или функциональные возможности двух или более блоков блок-схем и/или блочных схем могут быть по меньшей мере частично встроены. Наконец, другие блоки могут быть добавлены/вставлены между проиллюстрированными блоками, и/или блоки/операции могут быть опущены, не выходя за рамки концепции изобретения. Более того, хотя некоторые из схем содержат стрелки на путях связи, чтобы показать основное направление связи, следует понимать, что связь может происходить в направлении, противоположном изображенным стрелкам.
[00324] Многие изменения и модификации могут быть внесены в варианты осуществления без существенного отклонения от принципов идей настоящего изобретения. Предполагается, что все такие изменения и модификации включены в объем настоящего изобретения. Соответственно, раскрытый выше предмет изобретения следует рассматривать как иллюстративный, а не ограничительный, и прилагаемые примеры вариантов осуществления предназначены для охвата всех таких модификаций, улучшений и других вариантов осуществления, которые соответствуют духу и объему настоящих идей изобретения. Таким образом, в максимальной степени, разрешенной законом, объем настоящих изобретательских идей должен определяться максимально широкой допустимой интерпретацией настоящего раскрытия, включая следующие примеры вариантов осуществления и их эквивалентов, и не должен сокращаться или ограничиваться предшествующим подробным описанием в разделе "Осуществление изобретения".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И КОМПЛЕКСНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ АВИАЦИОННЫМИ СИСТЕМАМИ НАБЛЮДЕНИЯ И НАВИГАЦИИ | 2020 |
|
RU2799550C1 |
| Глиссадный радиомаяк | 2023 |
|
RU2818668C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| БИСТАТИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2658671C2 |
| РАДИОМАЯК ДЛЯ ЗАХОДА И ПОСАДКИ ВЕРТОЛЕТОВ НА ОГРАНИЧЕННУЮ ПЛОЩАДКУ В ОТСУТСТВИЕ ВИДИМОСТИ ЗЕМЛИ | 1993 |
|
RU2081428C1 |
| Способ и радиомаяк системы инструментальной посадки с функцией проверки и калибровки бортовых приемников воздушных судов (варианты) | 2023 |
|
RU2816376C1 |
| СПОСОБ ПОСАДКИ САМОЛЕТОВ | 2005 |
|
RU2296372C2 |
| ДВУХЧАСТОТНЫЙ ГЛИССАДНЫЙ РАДИОМАЯК | 2016 |
|
RU2624263C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| СИСТЕМА И СПОСОБ ДЛЯ МОБИЛЬНОЙ СВЯЗИ ПОСРЕДСТВОМ ГЕОСТАЦИОНАРНЫХ СПУТНИКОВ | 2016 |
|
RU2706226C2 |



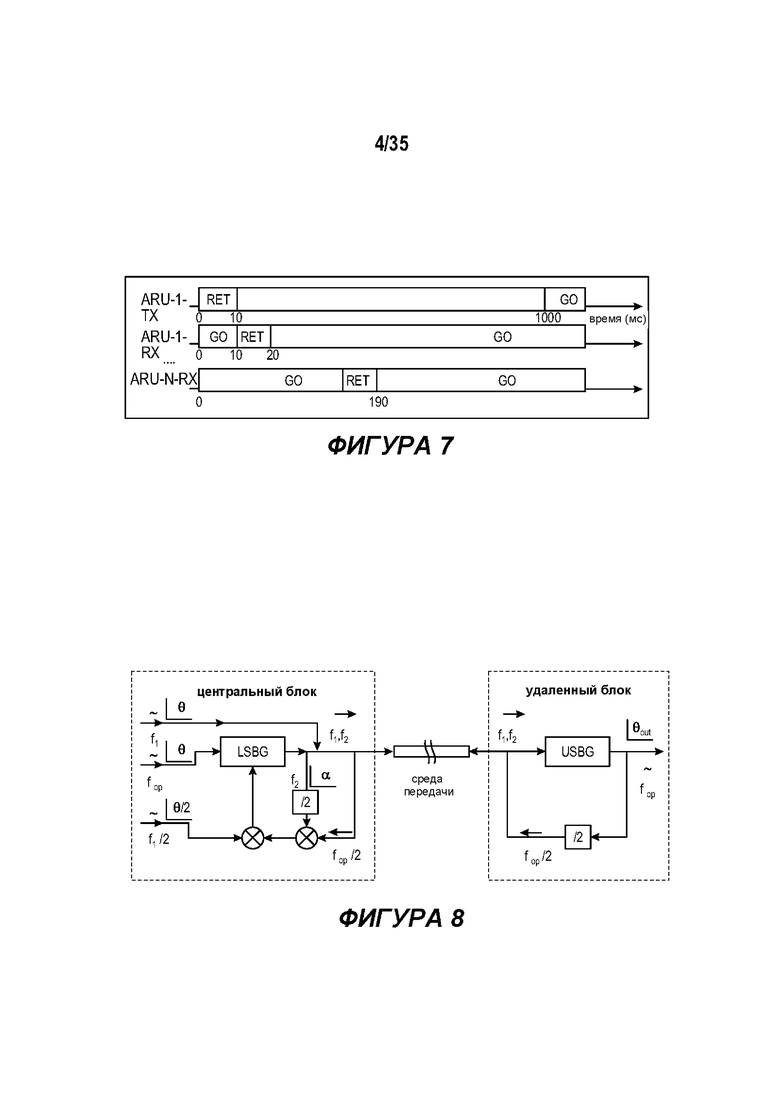



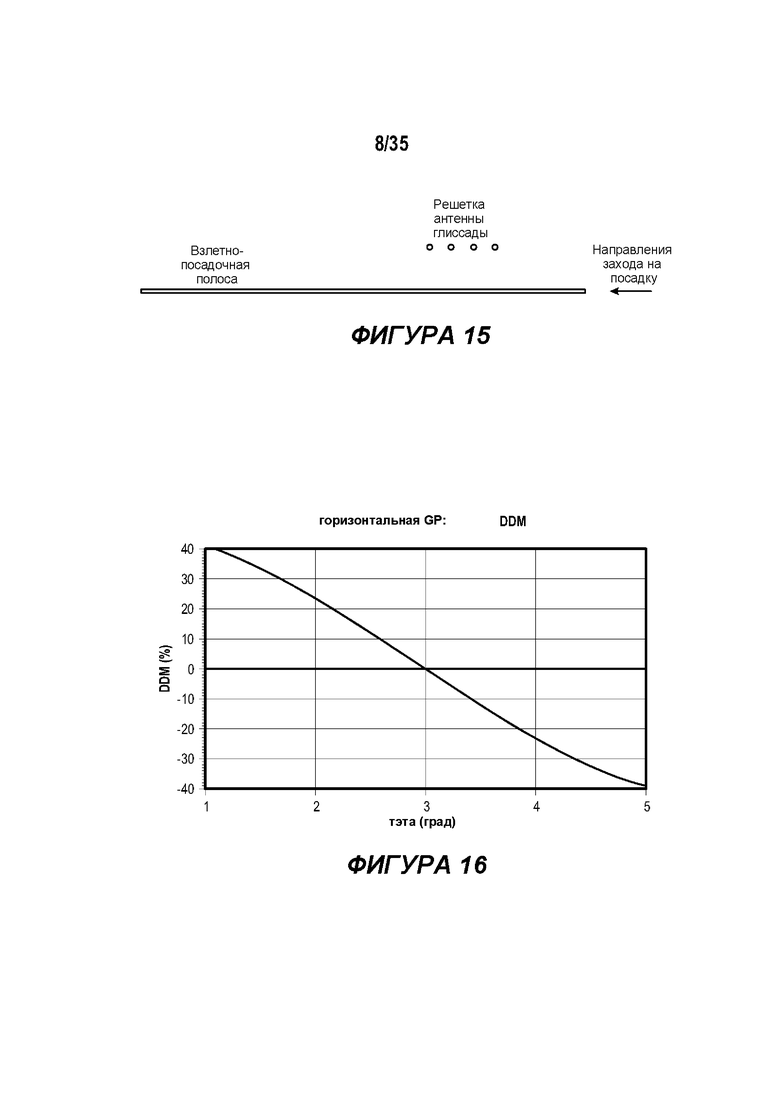
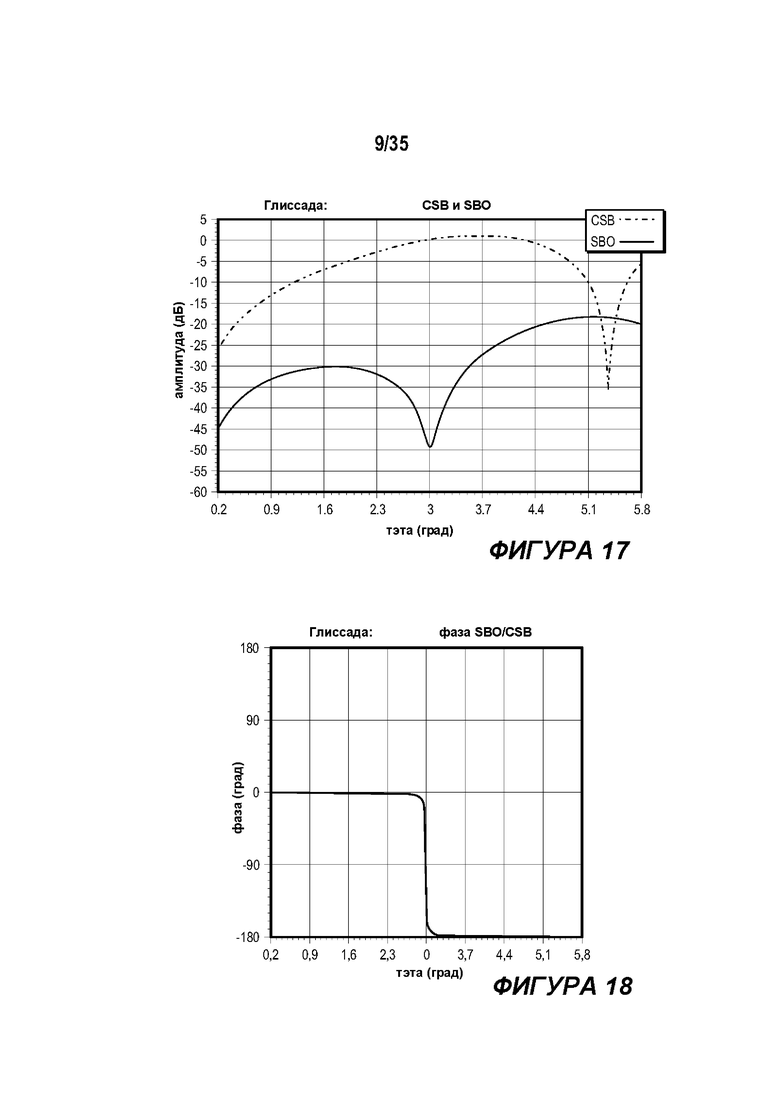

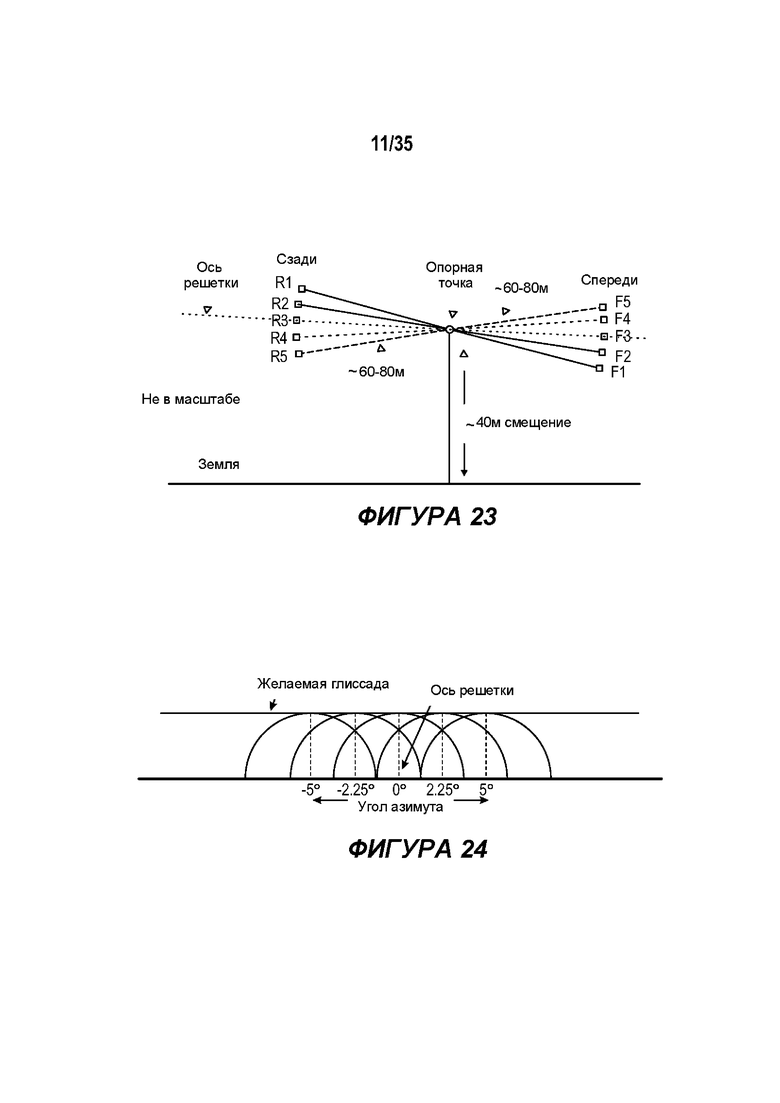







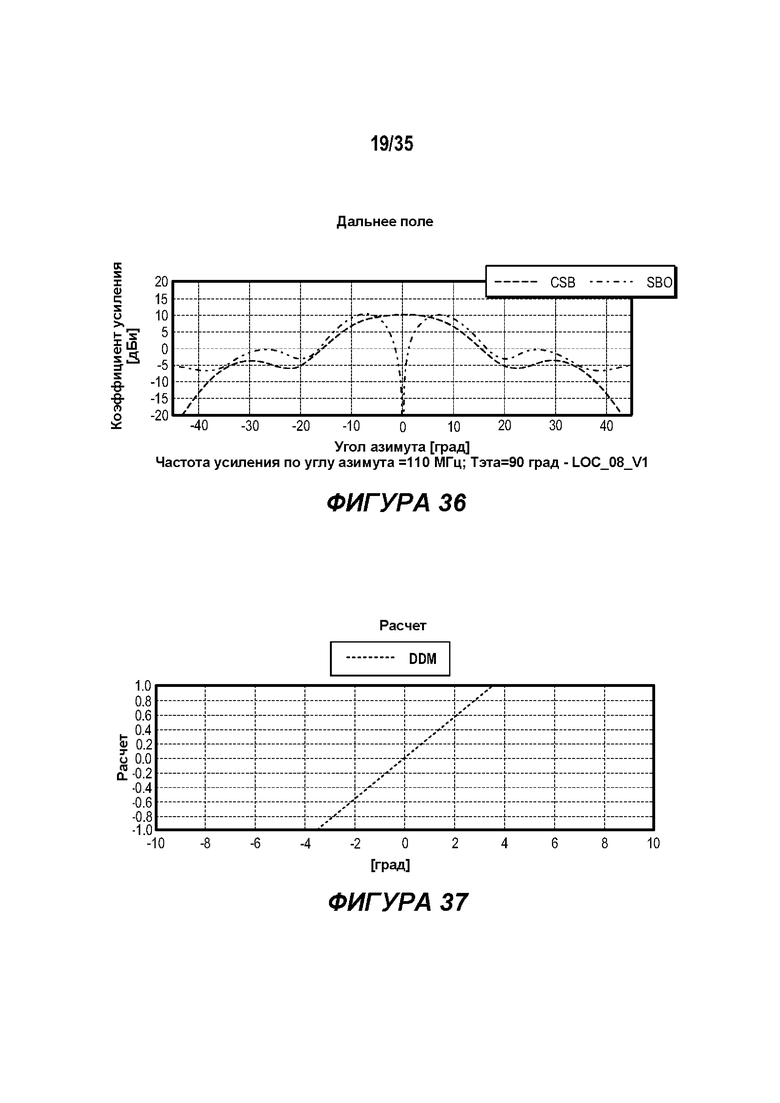
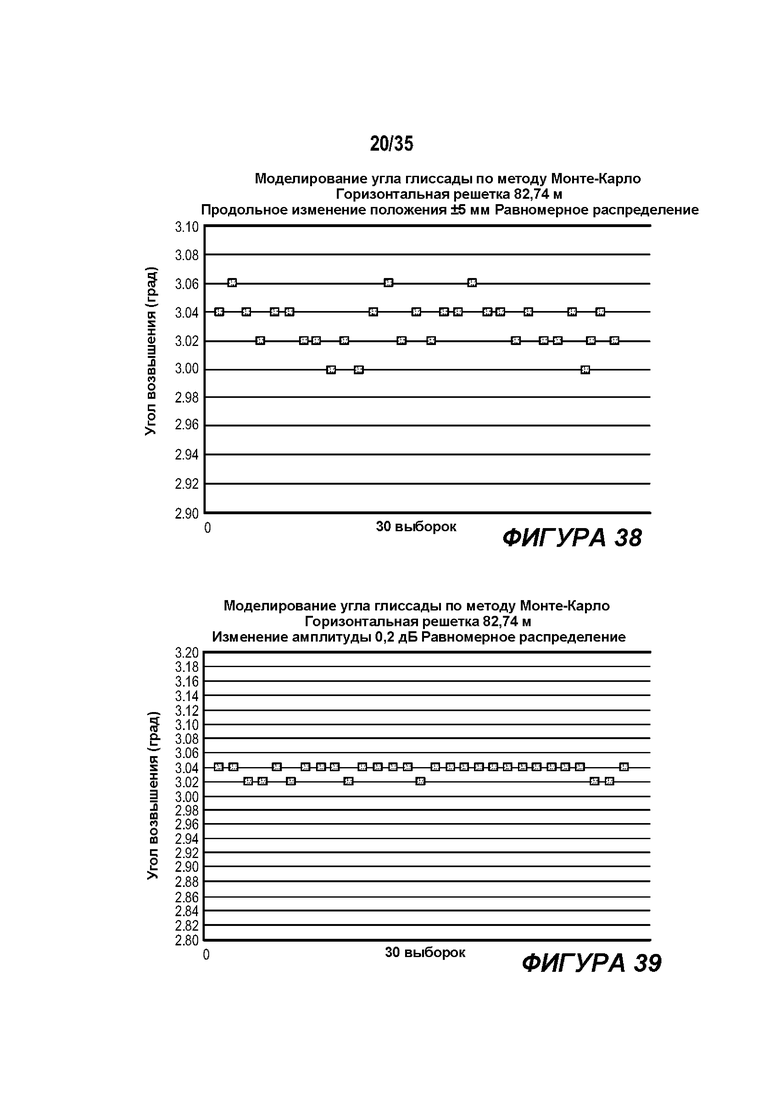
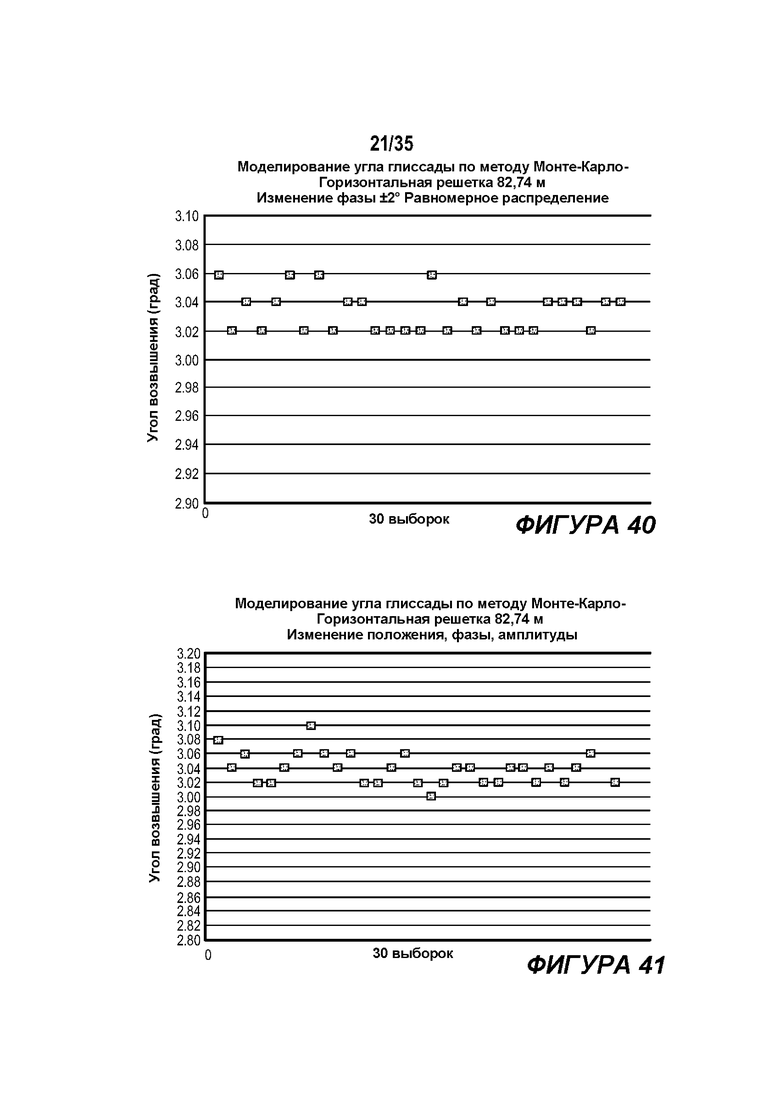

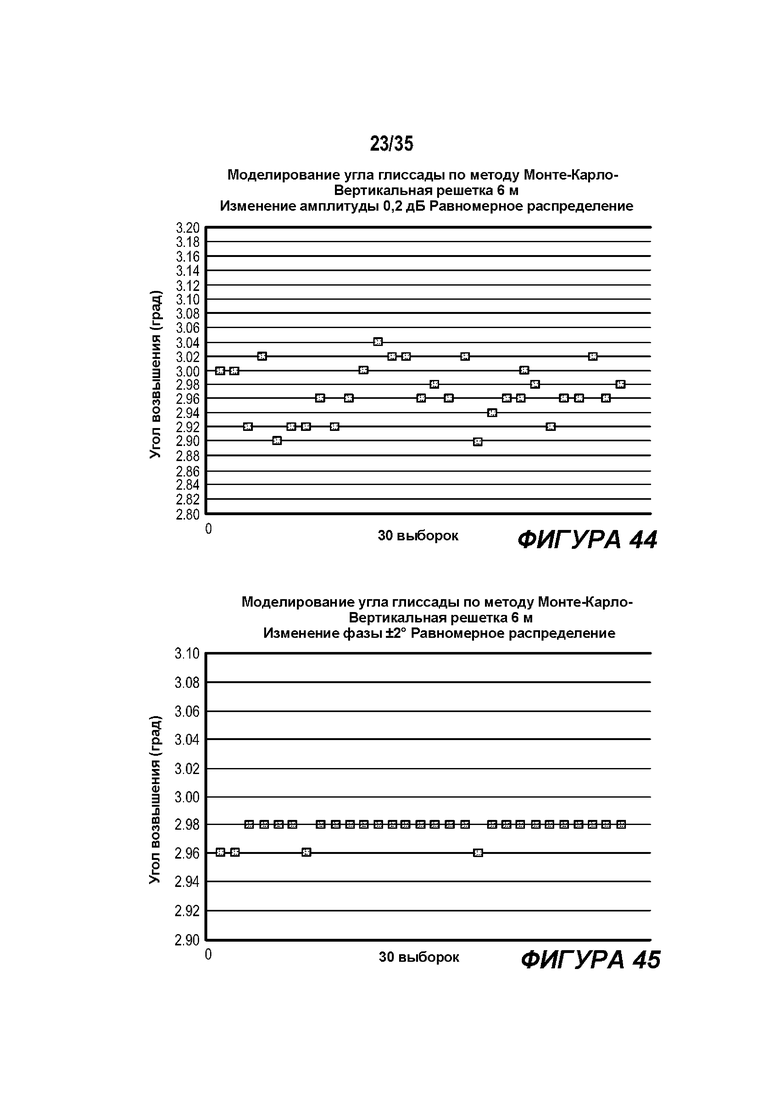



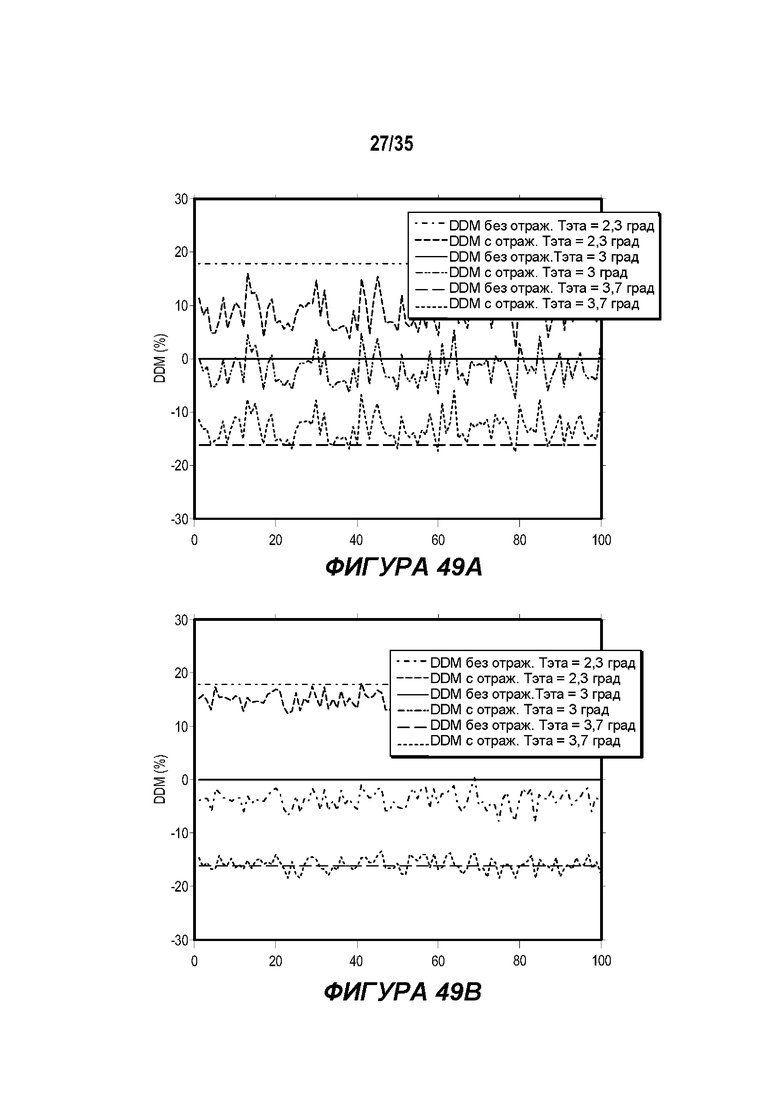
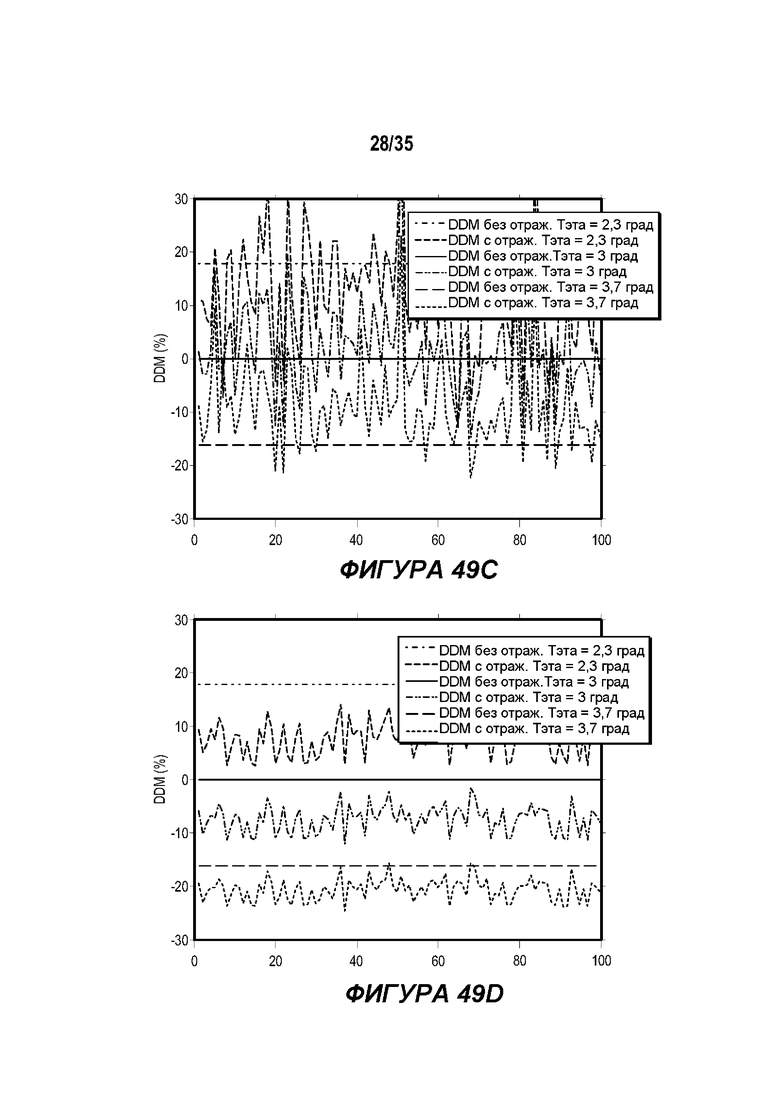
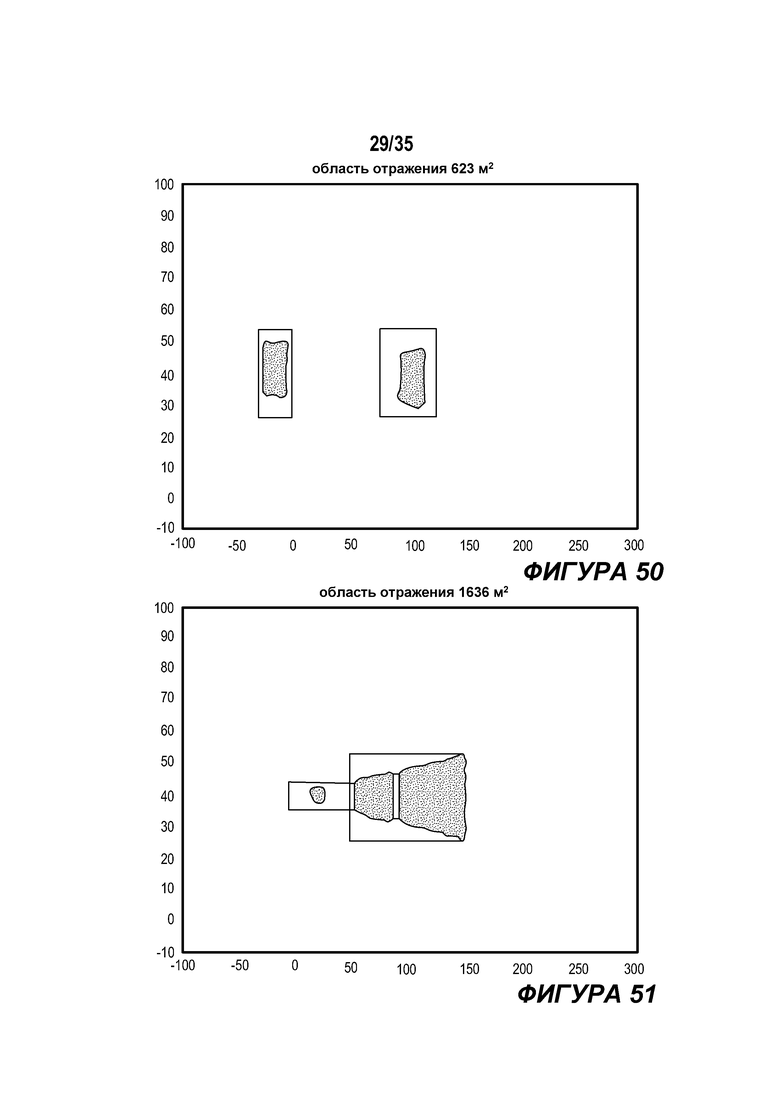
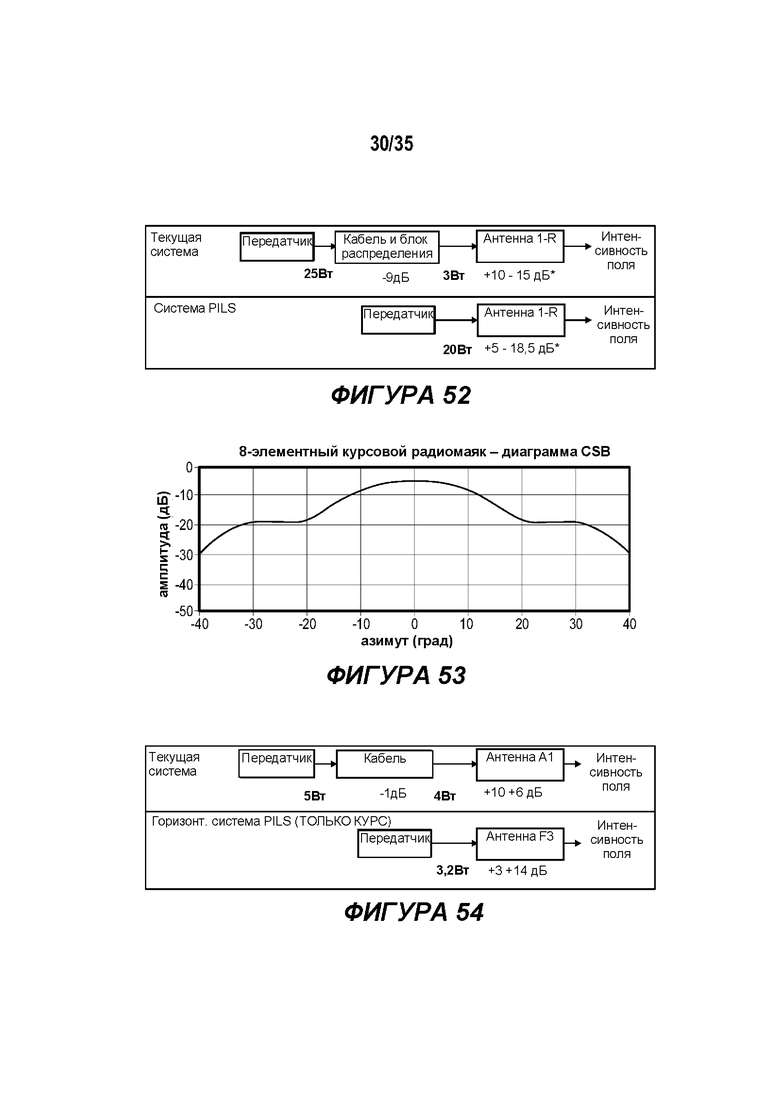
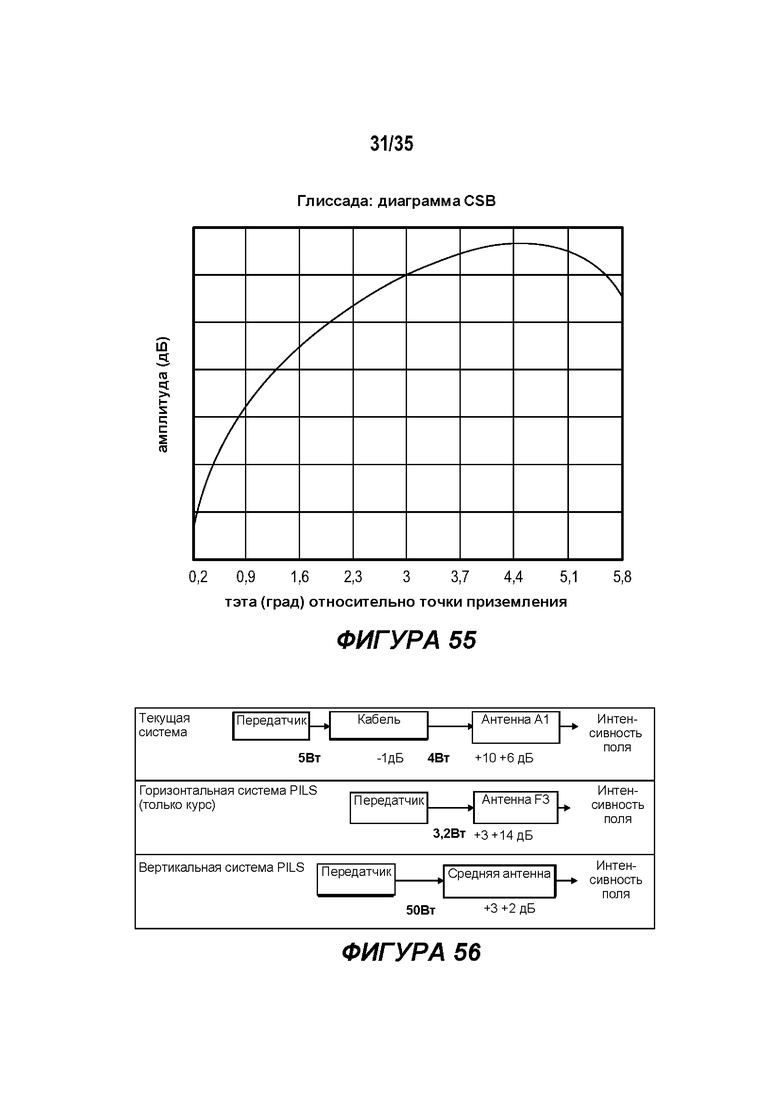
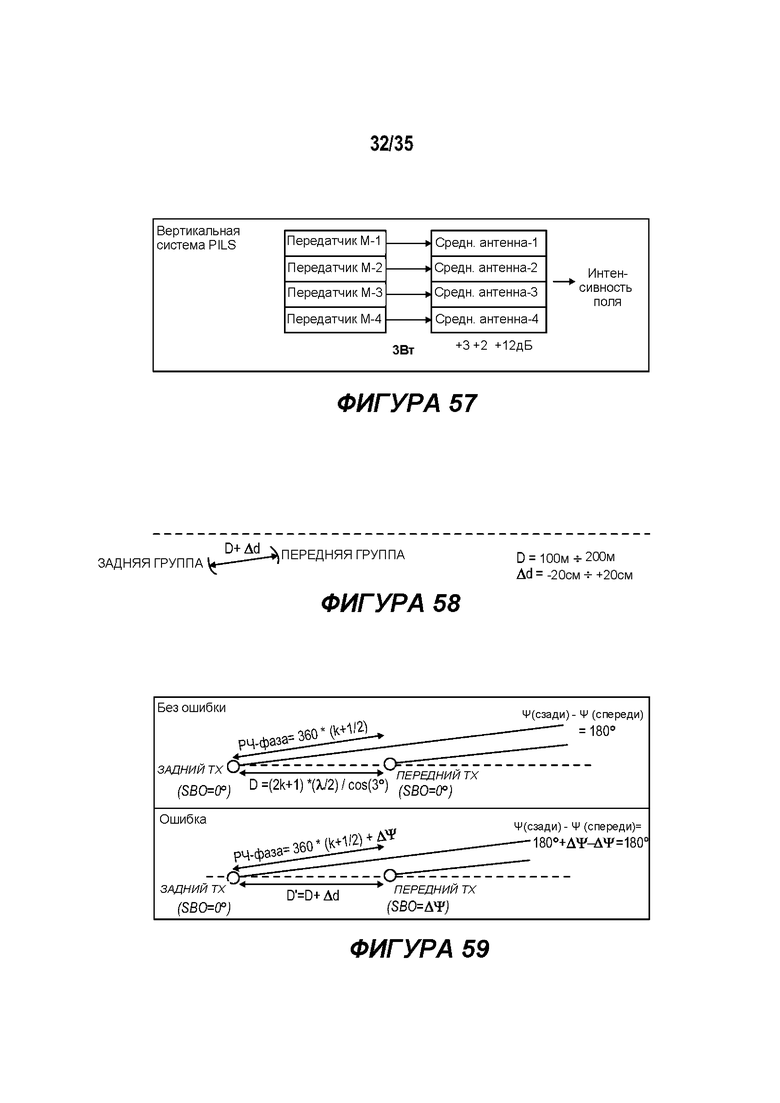



Изобретение относится к системам посадки по приборам для летательных аппаратов, в частности к решеткам глиссады и курсового радиомаяка ILS. Техническим результатом изобретения является решение потенциальных проблем синхронизации, которые могут возникать в архитектурах ILS, для гарантии когерентности составного сигнала в пространстве. Заявленная система посадки по приборам (ILS) содержит множество антенн и множество антенных радиоблоков (ARU). Каждый ARU из множества блоков ARU выполнен с возможностью работы для генерирования модулированного радиочастотного (РЧ) сигнала, подаваемого на отличающуюся антенну из множества антенн для передачи. ILS также содержит центральный блок обработки, который выполнен с возможностью работы для управления блоками ARU для регулировки синхронизации между модулированными РЧ-сигналами, подаваемыми блоками ARU на множество антенн для передачи. 38 з.п. ф-лы, 64 ил., 5 табл.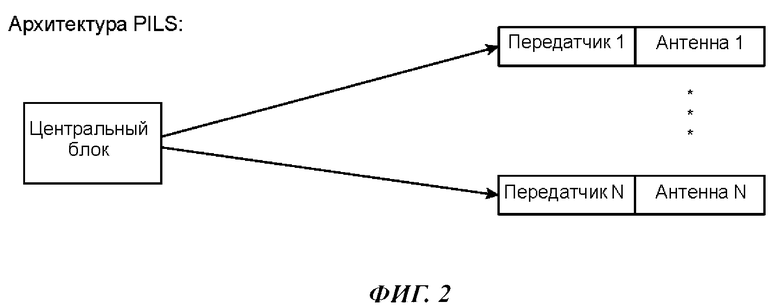
1. Система посадки по приборам, содержащая:
множество антенн;
множество антенных радиоблоков, каждый из которых выполнен с возможностью работы для генерирования модулированного РЧ-сигнала, подаваемого на отличающуюся антенну из множества антенн для передачи; и
центральный блок обработки, выполненный с возможностью работы для управления антенными радиоблоками для регулировки синхронизации между модулированными РЧ-сигналами, подаваемыми антенными радиоблоками на множество антенн для передачи.
2. Система по п. 1, в которой центральный блок обработки выполнен с возможностью работы для управления антенными радиоблоками для регулировки синхронизации несущей частоты и фазы между модулированными РЧ-сигналами, подаваемыми антенными радиоблоками на множество антенн для передачи.
3. Система по п. 2, в которой центральный блок обработки выполнен с возможностью работы для управления антенными радиоблоками для регулировки синхронизации разброса фазы несущей таким образом, чтобы разброс между модулированными РЧ-сигналами, подаваемыми антенными радиоблоками на множество антенн для передачи, не превышал порогового значения ухода РЧ.
4. Система по любому из пп. 1-3, в которой каждый из антенных радиоблоков напрямую подключен к антенне из множества антенн для подачи одного из модулированных РЧ-сигналов только на одну антенну из множества антенн для передачи.
5. Система по п. 4, в которой каждый из антенных радиоблоков содержит локальную схему РЧ-генератора, выполненную с возможностью фазовой синхронизации с сигналом опорного генератора, обеспечиваемым центральным блоком обработки.
6. Система по п. 5, в которой центральный блок обработки подключен через множество кабелей, каждый из которых подключен к отличающемуся антенному радиоблоку из указанных радиоблоков, для подачи сигналов через кабели для антенных радиоблоков для генерирования модулированных РЧ-сигналов,
при этом центральный блок обработки выполнен с возможностью работы для измерения задержек сигналов в кабелях между центральным блоком и каждым антенным радиоблоком и с возможностью регулировки синхронизации между модулированными РЧ-сигналами, подаваемыми антенными радиоблоками на множество антенн для передачи, на основе измерений задержек сигналов в кабелях.
7. Система по п. 6, в которой центральный блок обработки выполнен с возможностью работы для измерения задержек сигналов в кабелях между центральным блоком обработки и каждым антенным радиоблоком на основе сравнения фаз между сигналом опорного генератора и сигналами каждой локальной схемы РЧ-генератора.
8. Система по любому из пп. 1-7, в которой каждый из антенных радиоблоков содержит локальную схему РЧ-генератора, которая возбуждается встроенным в каждый из антенных радиоблоков кварцевым генератором с температурной компенсацией (ТСХО), который управляется контуром фазовой автоподстройки (PLL), синхронизированным с сигналом синхронизации, широковещательно передаваемым центральным блоком от встроенного в центральный блок ТСХО,
при этом центральный блок обработки выполнен с возможностью работы для периодической остановки ТСХО одного антенного радиоблока на определенный промежуток времени, в течение которого ТСХО упомянутого одного антенного радиоблока переведен в состояние удержания, и, пока ТСХО упомянутого одного антенного радиоблока находится в состоянии удержания, центральный блок работает для измерения разности фаз между сигналом встроенного в центральный блок обработки ТСХО и сигналом встроенного в упомянутый один антенный радиоблок ТСХО, отправленным по кабелю в центральный блок обработки.
9. Система по любому из пп. 1-8, в которой каждый из антенных радиоблоков содержит локальную схему РЧ-генератора, которая выполнена с возможностью работы для вывода сигнала детерминированного дробного умножения несущей частоты, который синхронизирован с общим широковещательно передаваемым центральным блоком обработки сигналом ТСХО.
10. Система по любому из пп. 1-9, в которой каждый из антенных радиоблоков содержит:
схему передатчика, выполненную с возможностью передачи при работе модулированного РЧ-сигнала;
схему синхронизации передатчика, выполненную с возможностью управления при работе синхронизацией модулированного РЧ-сигнала, переданного схемой передатчика;
схему приемника, выполненную с возможностью приема при работе модулированного РЧ-сигнала; и
схему синхронизации приемника, выполненную с возможностью управления при работе синхронизацией модулированного РЧ-сигнала, принятого схемой приемника.
11. Система по п. 10, в которой центральный блок обработки выполнен с возможностью регулировки при работе синхронизации несущей частоты и фазы между схемами передатчика в каждом из антенных радиоблоков.
12. Система по любому из пп. 1-11, в которой каждый из антенных радиоблоков представляет собой программно-определяемый радиоблок, выполненный с возможностью генерирования при работе модулированного радиочастотного сигнала с программируемой несущей частотой и программируемыми конфигурационными значениями.
13. Система по п. 12, в которой программируемые конфигурационные значения содержат по меньшей мере одно из мощности РЧ-сигнала, фазы РЧ-сигнала, глубин модуляции и фаз.
14. Система по любому из пп. 1-13, в которой каждый из антенных радиоблоков содержит локальную схему РЧ-генератора, которая возбуждается встроенным в каждый из антенных радиоблоков кварцевым генератором с температурной компенсацией (ТСХО), который управляется контуром фазовой автоподстройки (PLL), синхронизированным с сигналом синхронизации, широковещательно передаваемым центральным блоком от встроенного в центральный блок ТСХО,
при этом центральный блок обработки выполнен с возможностью работы для периодической остановки ТСХО одного антенного радиоблока на определенный промежуток времени, в течение которого ТСХО упомянутого одного антенного радиоблока переводится в состояние удержания, и, пока ТСХО упомянутого одного антенного радиоблока находится в состоянии удержания, центральный блок обработки работает для измерения разности фаз между сигналом встроенного в центральный блок обработки ТСХО и сигналом встроенного в упомянутый один антенный радиоблок ТСХО, отправленным по кабелю в центральный блок обработки.
15. Система по любому из пп. 1-14, в которой
каждый из антенных радиоблоков содержит локальную схему РЧ-генератора;
центральный блок обработки обеспечивает каждый из антенных радиоблоков сигналами двух частот, причем сигналы передаются по кабелям, каждый из которых соответственно подключает центральный блок обработки к отличающемуся антенному радиоблоку из указанных радиоблоков, причем центральный блок обработки объединяет сигналы двух частот для обеспечения сигнала рабочей частоты в центральном блоке обработки;
каждый из антенных радиоблоков смешивает сигналы двух частот вместе для получения сигнала рабочей частоты, который затем делится на два для генерирования возвратных сигналов, которые подаются назад в блок управления по соответствующему кабелю;
для каждого антенного радиоблока блок управления принимает возвратные сигналы от антенного радиоблока и сравнивает фазы возвратных сигналов от антенного радиоблока с сигналом рабочей частоты в центральном блоке обработки и регулирует синхронизацию антенного радиоблока на основе сравнения фаз.
16. Система по любому из пп. 1-15, в которой
множество антенн содержит решетку глиссады из антенн и решетку курсового радиомаяка из антенн; и
каждая антенна решетки глиссады и каждая антенна решетки курсового радиомаяка возбуждается отличающимся антенным радиоблоком из указанных радиоблоков.
17. Система по п. 16, в которой каждый из антенных радиоблоков представляет собой программно-определяемый радиоблок, выполненный с возможностью генерирования при работе модулированного радиочастотного сигнала с программируемой несущей частотой и с программируемыми конфигурационными значениями.
18. Система по п. 17, в которой программируемые конфигурационные значения содержат по меньшей мере одно из мощности РЧ-сигнала, фазы РЧ-сигнала, глубин модуляции и фаз.
19. Система по любому из пп. 16-18, в которой решетка глиссады из антенн содержит по меньшей мере четыре элемента антенны, расположенные горизонтально на расстоянии друг от друга, для обеспечения по меньшей мере четырехэлементной горизонтальной решетки.
20. Система по п. 19, в которой внешняя пара антенн решетки глиссады возбуждается посредством сигналов только боковой полосы (SBO), а внутренняя пара антенн решетки глиссады возбуждается посредством сигналов несущей плюс боковой полосы (CSB).
21. Система по п. 19, в которой решетка глиссады из антенн имеет по меньшей мере десять элементов антенны, расположенных горизонтально на расстоянии друг от друга, для обеспечения по меньшей мере десятиэлементной горизонтальной решетки.
22. Система по п. 21, в которой антенные радиоблоки выполнены с возможностью работы для возбуждения антенн с использованием мощностей и фаз сигналов CSB и SBO для каждой антенны, которые управляются для обеспечения почти плоского угла глиссады в диапазоне азимута.
23. Система по любому из пп. 16-22, в которой антенные радиоблоки выполнены с возможностью работы для возбуждения антенн с использованием сигнала клиренса (CLR), который представляет собой отдельный сигнал несущей, смещенный на 5 кГц по частоте, который модулируется только частотой 150 Гц, что создает чистый сигнал «лететь выше», причем центральный блок обработки выполнен с возможностью работы для индивидуальной регулировки CLR каждого антенного радиоблока.
24. Система по п. 23, в которой диаграмма направленности сигнала клиренса (CLR) формируется под управлением центрального блока обработки так, что мощность CLR становится меньше мощности сигнала курса глиссады, переданного антеннами решетки глиссады, для углов азимута внутри диапазона азимута, и больше мощности сигнала курса глиссады для углов азимута вне диапазона азимута.
25. Система по любому из пп. 16-24, в которой решетка глиссады из антенн содержит по меньшей мере три элемента антенны, расположенных вертикально на расстоянии друг от друга.
26. Система по любому из пп. 1-25, в которой решетка глиссады содержит одну из нулевой эталонной решетки и решетки глиссады m-типа.
27. Система по любому из пп. 1-26, в которой решетка глиссады содержит решетку глиссады без формирования изображения.
28. Система по любому из пп. 1-27, в которой центральный блок обработки также выполнен с возможностью работы для:
синтеза сигнала глубины модуляции (DDM) и/или сигнала суммарной глубины модуляции (SDM), принятых находящимся в воздухе летательным аппаратом, на основе измеренных РЧ-параметров, принятых от одного или более отдельных антенных радиоблоков; и
определения, соответствует ли или превышает ли синтезированный сигнал DDM и/или сигнал SDM заранее заданное пороговое значение, на основе сравнения сигнала DDM и/или сигнала SDM с одним или более сконфигурированными РЧ-параметрами отдельных антенных радиоблоков.
29. Система по п. 28, в которой центральный блок обработки также выполнен с возможностью работы для прекращения работы множества антенных радиоблоков в ответ на определение того, что синтезированный сигнал DDM и/или сигнал SDM соответствует заранее заданному пороговому значению или превышает его.
30. Система по п. 28, в которой центральный блок обработки также выполнен с возможностью работы для продолжения работы множества антенных радиоблоков в ответ на определение того, что синтезированный сигнал DDM и/или сигнал SDM не соответствует заранее заданному пороговому значению или не превышает его.
31. Система по любому из пп. 1-27, в которой каждый из антенных радиоблоков из множества антенных радиоблоков также выполнен с возможностью работы для:
приема модулированного РЧ-сигнала, подаваемого на антенну из множества антенн, связанную с антенным радиоблоком; и
определения, соответствует ли или превышает ли модулированный РЧ-сигнал заранее заданное пороговое значение, на основе сравнения модулированного РЧ-сигнала с одним или более параметрами сигнала антенного радиоблока.
32. Система по п. 31, в которой каждый из антенных радиоблоков из множества антенных радиоблоков также выполнен с возможностью работы для передачи сообщения в центральный блок обработки, которое включает в себя индикацию того, что модулированный РЧ-сигнал соответствует заранее заданному пороговому значению или превышает его на основе определения того, что модулированный РЧ-сигнал соответствует заранее заданному пороговому значению или превышает его.
33. Система по п. 32, в которой центральный блок обработки также выполнен с возможностью работы для определения, продолжать ли работу одного или более из множества антенных радиоблоков, на основе упомянутого сообщения.
34. Система по любому из пп. 1-27, также содержащая антенный радиоблок контроля, который выполнен с возможностью работы для приема РЧ-сигналов, излучаемых множеством антенн.
35. Система по п. 34, в которой антенный радиоблок контроля также выполнен с возможностью работы для определения, совпадают ли РЧ-сигналы, излучаемые множеством антенн, с ожидаемым сигналом DDM и/или сигналом SDM, которые должны быть приняты находящимся в воздухе летательным аппаратом от системы ILS.
36. Система по п. 35, в которой антенный радиоблок контроля также выполнен с возможностью работы для инициирования прекращения излучения РЧ-сигналов множеством антенн в ответ на определение того, что РЧ-сигналы, излучаемые множеством антенн, не совпадают с ожидаемым сигналом DDM и/или сигналом SDM, которые должны быть приняты находящимся в воздухе летательным аппаратом от системы ILS.
37. Система по п. 35, в которой антенный радиоблок контроля также выполнен с возможностью работы для инициирования повторной калибровки излучения РЧ-сигналов множеством антенн в ответ на определение того, что РЧ-сигналы, излучаемые множеством антенн, отклоняются в пределах заранее заданного порогового значения от предыдущих РЧ-сигналов, излученных во время процесса калибровки системы ILS.
38. Система по любому из пп. 1-15, в которой кабели содержат волоконно-оптические кабели, и при этом центральный блок обработки также выполнен с возможностью работы для управления антенными радиоблоками для регулировки синхронизации между модулированными РЧ-сигналами, подаваемыми антенными радиоблоками на множество антенн для передачи, с использованием оптических сигналов синхронизации, передаваемых по волоконно-оптическим кабелям.
39. Система по п. 38, в которой центральный блок обработки также выполнен с возможностью работы для временного мультиплексирования сигналов синхронизации, передаваемых по волоконно-оптическим кабелям, путем модуляции интенсивности света в волоконно-оптических кабелях.
| US 2017149148 A1, 25.05.2017 | |||
| WO 9854546 A9, 05.07.2001 | |||
| GB 1330987 A, 19.09.1973 | |||
| US 2018076906 A1, 15.03.2018 | |||
| ГЛИССАДНЫЙ РАДИОМАЯК (ВАРИАНТЫ) | 2009 |
|
RU2429499C2 |
| СПОСОБ ФОРМИРОВАНИЯ, ИЗМЕРЕНИЯ ПАРАМЕТРОВ И ОБРАБОТКИ СИГНАЛОВ СИГНАЛА ДЛЯ ДВУХЧАСТОТНОЙ КУРСО-ГЛИССАДНОЙ СИСТЕМЫ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2476989C1 |
| СПОСОБ УПРАВЛЕНИЯ АМПЛИТУДНО-ФАЗОВЫМ РАСПРЕДЕЛЕНИЕМ НА РАСКРЫВЕ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2006 |
|
RU2333578C2 |

