Изобретение относится к щёточному агрегату для обработки поверхности заготовки, с приводимым во вращательное движение держателем щётки и с кольцевой щёткой с венцом с выступающими наружу щетинками.
Такого рода щёточные агрегаты используются обычно для того, чтобы освобождать поверхность соответствующей заготовки, к примеру, от коррозии, лака или аналогичных покрытий, или создавать на ней необходимую глубину шероховатости. В уровне техники в соответствии с родовой версией согласно ЕР 1 834 733 В1 заявителя с этой целью описывается щёточный агрегат, который оснащён стопорным средством. Благодаря этому, можно добиться глубины шероховатости, которую до настоящего времени можно было получить лишь при пескоструйной обработке. Под упомянутой глубиной шероховатости понимается, в целом, так называемое среднее значение Ra шероховатости (как среднее арифметическое абсолютных значений отклонений профиля на базовой длине в соответствии с DIN 4764, а также DIN ISO 1302). Это, в принципе, зарекомендовало себя и многократно используется на практике. Сравнимый уровень техники представляет ЕР 2 618 965 В1, при котором стопорное средство работает, к тому же, как шлифовальный круг для щетинок. Для этой цели стопорное средство может перемещаться и осуществлено, к примеру, с возможностью радиального и/или тангенциального перемещения.
Щёточные агрегаты и оснащённые ими инструменты с вращающимися щётками могут использоваться стационарно, к примеру, в сочетании с машиной в одном машинном зале. Однако, возможно также осуществить упомянутый инструмент с вращающимися щётками с ручным управлением. В обоих случаях на практике зачастую имеет место проблема проведения щёточного агрегата вдоль обрабатываемой заготовки или её поверхности. Это может быть осуществлено – как описано – автоматически и/или вручную. Вследствие этого, зачастую имеется опасность того, что на поверхности заготовки образуются желобки или, по меньшей мере, равномерные структуры. Они плохо поддаются равномерной обработке поверхности и осложняют при определённых обстоятельствах последующую адгезию покрытия, краски и проч. В данном случае используется изобретение.
Задача настоящего изобретения заключается в создании такого щёточного агрегата для обработки поверхности заготовки, чтобы была образована однородно обработанная поверхность.
Для решения указанной задачи щёточный агрегат в соответствии с родовой версией в рамках изобретения, характеризуется тем, что кольцевая щётка осуществлена с возможностью перемещения. Как правило, кольцевая щётка осуществлена с возможностью перемещения с вибрацией.
При этом изобретение исходит, прежде всего, из тезиса о том, что кольцевая щётка удерживается при помощи приводимого во вращательное движение держателя щётки. Предусмотренное в соответствии с изобретением перемещение кольцевой щётки предполагает, тем самым, что удерживающий кольцевую щётку и приводящий её во вращательное движение держатель щётки в дополнение к своему вращательному движению осуществляет ещё и перестановочное движение. Как правило, кольцевая щётка осуществлена даже, и предпочтительно, с возможностью перестановки с вибрацией. Вследствие этого, кольцевая щётка или удерживающий кольцевую щётку держатель щётки осуществляет колебательное движение, которое в сочетании с осуществляемым вручную и/или автоматически движением подачи, в целом, приводит к тому, что поверхность обрабатываемой заготовки обрабатывается однородно и, в целом, имеет место и наблюдается однородное распределение глубины шероховатости.
В соответствии с предпочтительным вариантом осуществления кольцевая щётка может быть осуществлена с возможностью радиального и/или аксиального перемещения. Как правило, здесь работают лишь с аксиальным перемещением кольцевой щётки и, как следствие, захватывающего и удерживающего кольцевую щётку держателя кольцевой щётки. То есть, дополнительное радиальное перемещение кольцевой щётки, хотя и возможно, однако, на практике используется у автоматических щёточных агрегатов в лучшем случае для того, чтобы подвести щёточный агрегат и, следовательно, кольцевую щётку в рабочее положение, к примеру, к соответствующей обрабатываемой заготовке или к её поверхности. В соответствии с изобретением речь идёт, прежде всего, об управляемом в ручном режиме щёточном агрегате и, как следствие, в частности, об управляемом вручную инструменте с вращающейся щёткой. Этот инструмент с вращающейся щёткой оснащён упомянутым щёточным агрегатом и дополнительно приводным блоком для щёточного агрегата.
Фактически такой управляемый в ручном режиме инструмент с вращающейся щёткой может быть осуществлён, в целом, в виде переносного инструмента или в виде управляемого в ручном режиме инструмента с вращающейся щёткой. Для этой цели обычно используется приводной блок, который имеет электромотор, а при необходимости, редуктор, и в предпочтительном варианте работает при помощи одного или нескольких аккумуляторов. В принципе, управляемый в ручном режиме инструмент с вращающейся щёткой может приводиться в действие также и пневматически. В любом случае в предпочтительном варианте движение перемещения инструмента с вращающейся щёткой и, следовательно, щёточного агрегата осуществляется, в целом, вручную. Возможное радиальное установочное перемещение или подача щёточного агрегата к поверхности обрабатываемой заготовки также осуществляется вручную. Напротив, перемещение кольцевой щётки и, в частности, её аксиальное перемещение осуществляется автоматически, и притом при помощи уже имеющегося приводного блока, который обеспечивает перевод держателя щётки и, соответственно, кольцевой щётки во вращательное движение. То есть, приводной блок в качестве составной части оснащённого щёточным агрегатом инструмента с вращающейся щёткой воздействует в соответствии с изобретением, с одной стороны, с вращением на держатель щётки, а, с другой стороны, в его аксиальном направлении, и притом в предпочтительном варианте с вибрацией. Для этого приводной блок может быть оснащён, к примеру, с одним мотором или электромотором для вращательного движения и другим мотором или электромотором для аксиального движения с вибрацией. Однако, возможно также реализовать или осуществить оба движения, между тем, посредством лишь одного электромотора.
Как уже упоминалось ранее, кольцевая щётка осуществлена, прежде всего, с возможностью аксиального перемещения, причём в данном случае, в основном, используют вибрирующее движение. То есть, ось несущего или удерживающего кольцевую щётку держателя щётки с вибрацией и в аксиальном направлении перемещается возвратно-поступательным образом при помощи приводного блока. Вибрирующее аксиальное движение может соответствовать при этом движению во времени по синусоиде. Такое движение по синусоиде может быть реализовано и осуществлено в особо предпочтительном варианте за счёт того, что ось держателя щётки, например, нагружается действующим на ось кулачком, который действует против усилия пружины и за счёт этого способствует уже описанному ранее движению по синусоиде оси держателя щётки и, следовательно, оси кольцевой щётки. Фактически именно кольцевая щётка и держатель щётки осуществлены, как правило, соответственно, вращательно-симметрично и соосно относительно друг друга.
Чтобы иметь возможность осуществить и реализовать описанное ранее аксиальное перемещение кольцевой щётки держателя щётки, держатель щётки осуществлён, в основном, по меньшей мере, двухкомпонентным. Фактически держатель щётки состоит в предпочтительном варианте из стационарной детали подшипника и выполненной, напротив, с возможностью аксиального перемещения детали щётки. Деталь щётки держателя щётки обеспечивает при этом в предпочтительном варианте направление и удержание кольцевой щётки, в то время как деталь подшипника, прежде всего, и исключительно принимает на себя функцию подшипника для детали щётки. Вследствие этого, деталь подшипника осуществлена стационарной, в то время как деталь щётки осуществлена не только с возможностью аксиального перемещения, но и с возможностью вращения и, следовательно, кольцевая щётка также переводится в режим вращения.
Для этой цели стационарная деталь подшипника оснащена полым отверстием для входящей в него в зацепление цапфы, выполненной с возможностью аксиального перемещения детали щётки. Цапфа выполненной с возможностью аксиального перемещения детали щётки установлена при этом без закрепления и может быть присоединена к основанию выполненной с возможностью перемещения детали щётки. Благодаря этому, стационарная деталь подшипника с полым отверстием на цапфе может осуществлять требуемое вращательное движение для кольцевой щётки.
В следующем варианте осуществления в связи с этим предусмотрено, что стационарная деталь подшипника имеет далее втулку для входящей в неё в зацепление вставной цапфы, которая приводится во вращательное движение и нагружается в аксиальном направлении со стороны приводного блока. Аксиальное нагружение осуществляется при этом дополнительно и зачастую также с вибрацией, так что вставная цапфа при помощи приводного блока приводится во вращательное движение и нагружается в аксиальном направлении с вибрацией.
Чтобы детально реализовать и осуществить это втулка, в целом, оснащена пазами, в которые радиально входят в зацепление присоединённые к вставной цапфе ламели. Благодаря этому, втулка и вставная цапфа обеспечивают, с одной стороны, силовое замыкание в направлении вращения, чтобы расположенная на детали щётки кольцевая щётка, как и требовалось, могла быть приведена во вращательное движение. Вместе с тем, и с другой стороны, взаимодействие между пазами и входящими в них в зацепление ламелями обеспечивает то, что вставная цапфа может осуществлять нужное аксиальное перемещение относительно втулки и, следовательно, стационарной детали подшипника. Вместе с втулкой дополнительно это обеспечивает то, что вставная цапфа в дополнение также вращается. Для этого, по меньшей мере, две радиально присоединённые к вставной цапфе ламели, по большей части с геометрическим замыканием, входят в зацепление в соответствующие пазы втулки. В принципе, в данном случае возможно также и другое конструктивное решение.
Другое особое значение для изобретения имеет то обстоятельство, что дополнительно предусмотрено погружаемое во вращающийся венец со щетинками стопорное средство, которое обеспечивает упругую деформацию вращающихся щетинок и/или щёточного полотна, на котором располагаются щетинки, в качестве составной части кольцевой щётки. Благодаря этому, щетинки и/или щёточная лента могут сохранять кинетическую энергию, так что щетинки после её высвобождения обрабатывают поверхность заготовки не только в процессе вращения, но и, к тому же, в процессе соударения, вследствие высвобождения после прохождения стопорного средства сохранённой кинетической энергии. Основной принцип работы такого стопорного средства описывается, к примеру, в уже указанном во вступлении и упомянутом патенте ЕР 1 834 733 В1 заявителя.
В соответствии с изобретением стопорное средство, между тем, может быть дополнительно осуществлено с возможностью перемещения, как это становится, в принципе, очевидным на основании также упомянутого во вступлении к описанию патента ЕР 2 618 965 В1. Для реализации перемещения стопорного средства, это стопорное средство может быть перемещено, в целом, радиально относительно оси вращающейся кольцевой щётки при изменении зазора. Это радиальное установочное движение может быть реализовано таким образом, что стопорное средство перемещается при помощи эксцентрика и/или линейного регулировочного механизма.
За счёт дополнительной в соответствии с изобретением возможности реализации стопорного средства и его перемещения имеет место не только опция равномерной обработки поверхности в отношении полученного профиля шероховатости, но и перемещение стопорного средства в радиальном направлении относительно оси кольцевой щётки приводит также к тому, что изменяется кинетическая энергия, с которой щетинки соприкасаются с поверхностью обрабатываемой заготовки.
В связи с этим, в принципе, действительна упрощённая формула, что кинетическая энергия щетинок тем выше, чем больше радиальный зазор стопорного средства относительно упомянутой оси кольцевой щётки. Тогда внутреннее расположение в радиальном направлении стопорного средства приводит к повышению и усилению деформации щетинок и, вследствие этого, к повышению кинетической энергии, с которой щетинки соприкасаются с поверхностью заготовки.
Эти принципиальные взаимосвязи исследованы проф. Робертом Дж. Штанго и др. и изложены в многочисленных публикациях. Ссылаются на две публикации «Surface preparation of ship-construction steel/(ABS-A) via bristle blasting process», NACE Corrosion CONFERENCE & EXPO 2010, paper No. 10385, а также на «Evaluation of bristle blasting process for surface preparation of ship-construction steel» (NACE CORROSION CONFERENCE & EXPO 2012, paper No. C2012-0001442).
В соответствии с предпочтительным вариантом осуществления в связи с этим стопорное средство, по большей части, в радиальном направлении осуществлено с возможностью перемещения относительно упомянутой оси вращающейся кольцевой щётки или может быть перемещено в радиальном направлении относительно упомянутой оси. Также возможно отрегулировать кольцевую щётку на поверхность и/или осуществить аксиальное перемещение.
Предметом изобретения является также инструмент с вращающейся щёткой и, в частности, инструмент с вращающейся щёткой с ручным управлением, который оснащён описанным ранее щёточным агрегатом и приводным блоком для щёточного агрегата. Этот инструмент с вращающейся щёткой может быть осуществлён, в частности, автономным, если приводной блок работает на электричестве, а система энергоснабжения оснащена предусмотренными в корпусе машины аккумуляторами или, по меньшей мере, одним единственным аккумулятором. В связи с этим появляются существенные преимущества.
Далее изобретение поясняется более подробно на основании фигур чертежей, представляющих лишь один пример осуществления, на котором показаны:
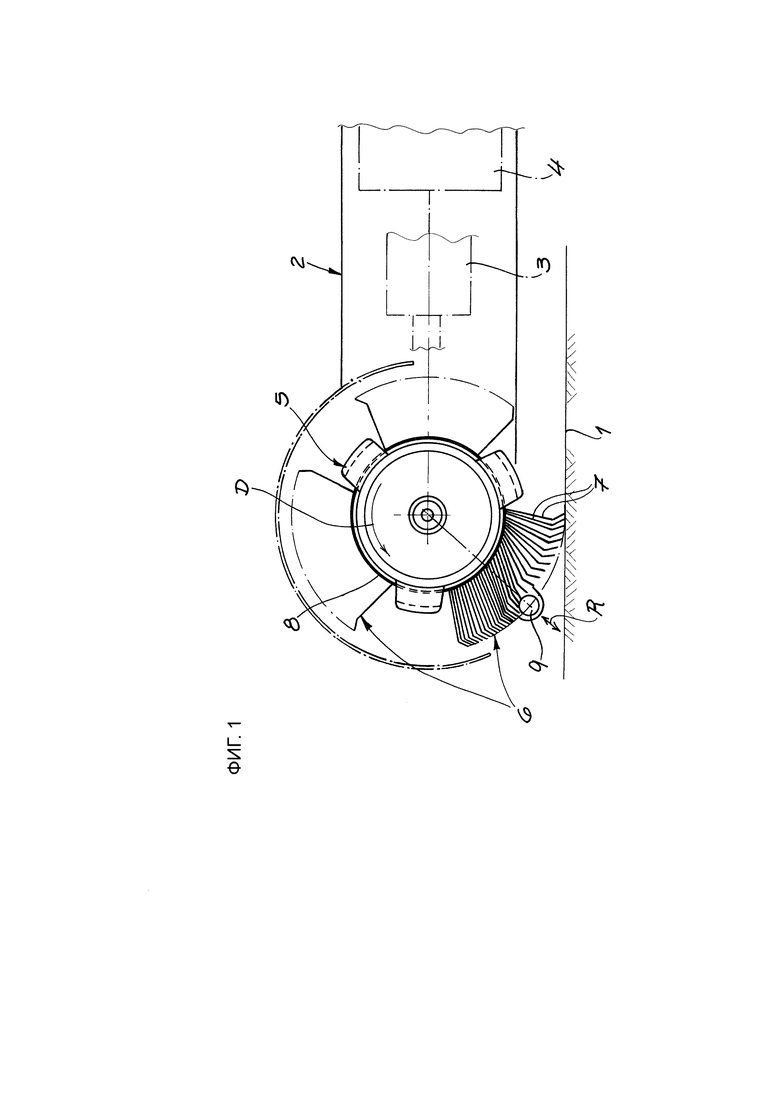
фиг. 1 щёточный агрегат в соответствии с изобретением и соответствующий инструмент с вращающейся щёткой на виде сбоку;
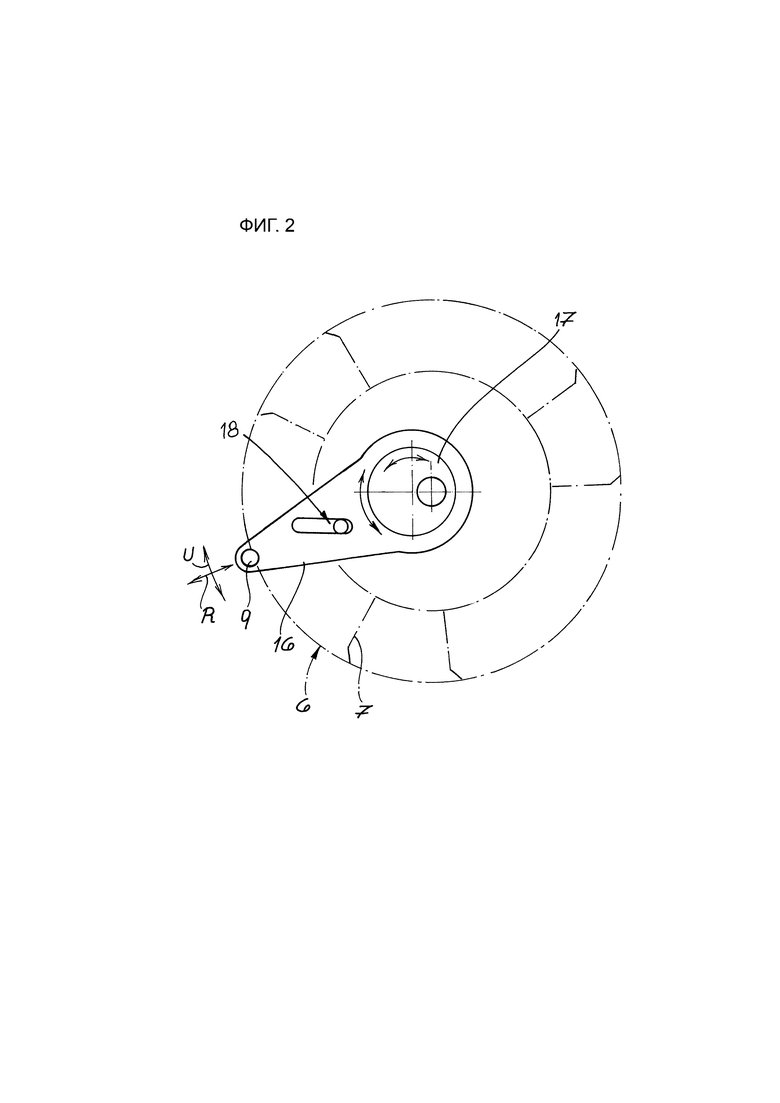
фиг. 2 стопорное средство и блок для перемещения стопорного средства в первом варианте осуществления;
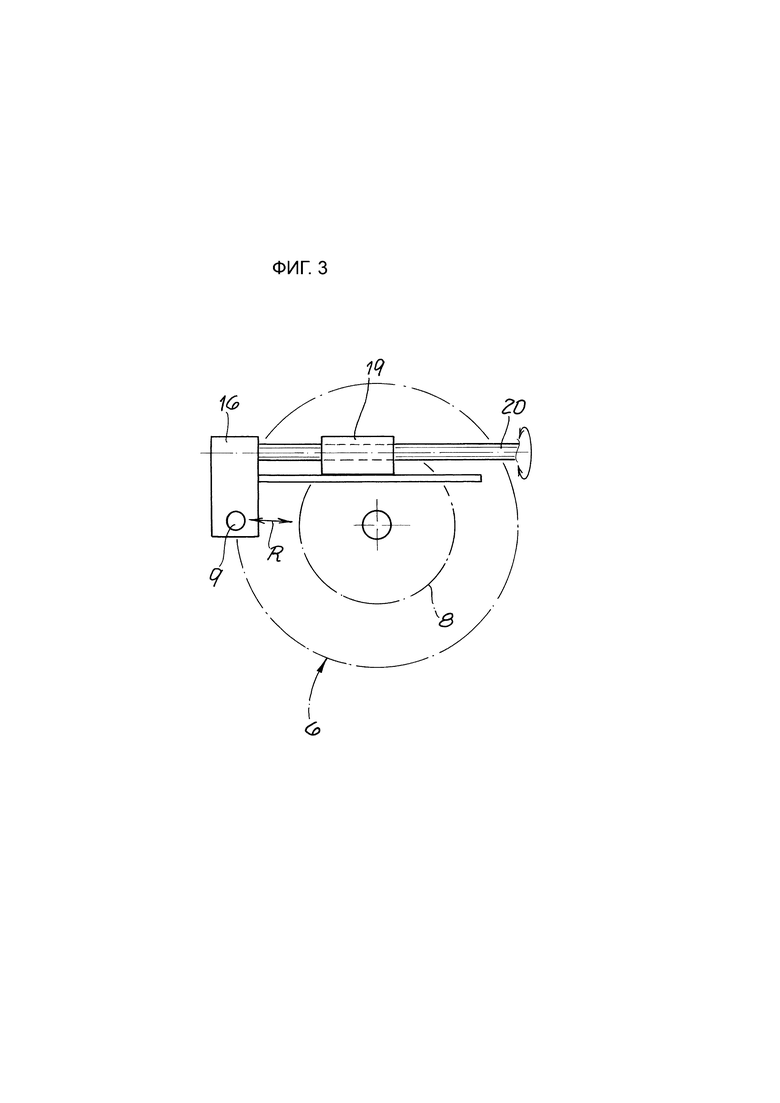
фиг. 3 следующий второй вариант блока для перемещения стопорного средства; и
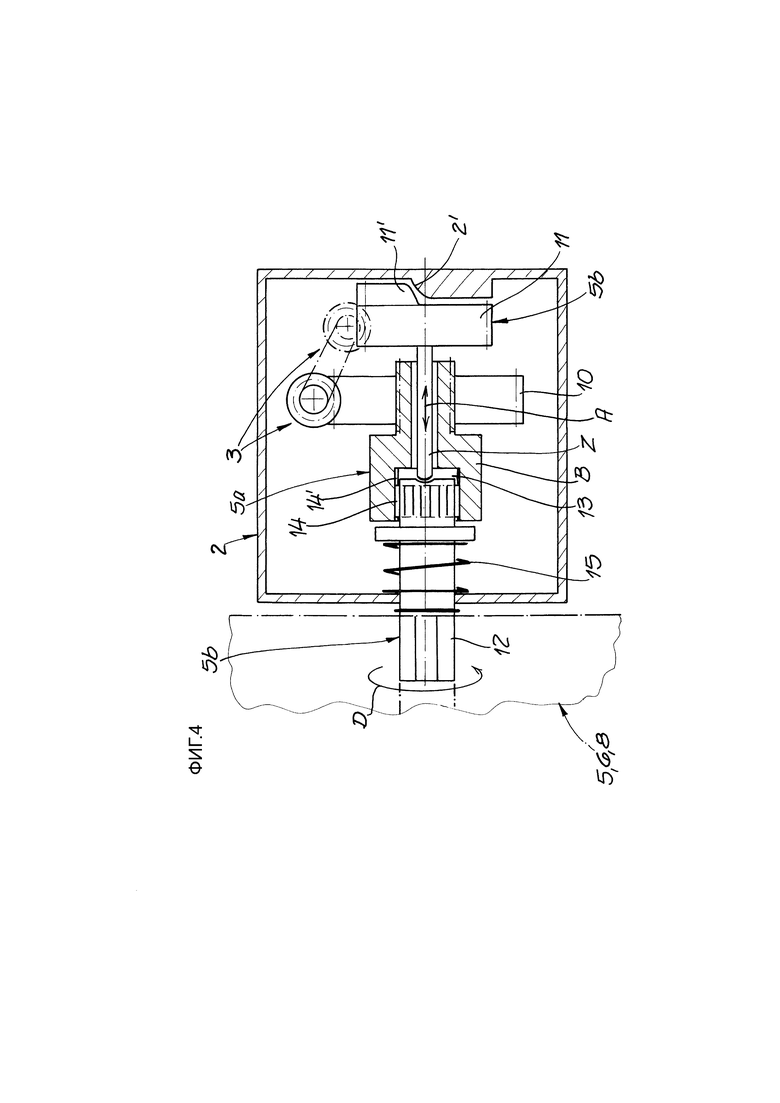
фиг. 4 приводной блок в соответствии с изобретением для вращательного и дополнительно для аксиального перемещения щёточного агрегата с вибрацией.
На фиг. 1 изображён щёточный агрегат в соответствии с изобретением для обработки поверхности заготовки 1. Для этой цели щёточный агрегат присоединён к корпусу 2 инструмента c вращающейся щёткой. Внутри корпуса 2 инструмента с вращающейся щёткой находится в соответствии с примером осуществления приводной блок 3, с одной стороны, и энергоаккумулятор 4 для электрического приводного блока 3, с другой стороны. Под энергоаккумулятором 4 могут пониматься один или несколько аккумуляторов.
Один или несколько аккумуляторов могут, соответственно, через разъём для зарядки в корпусе 2 или на нём, индукционно или же посредством извлечения из корпуса 2 машины в дополнительную зарядную базу заряжаться снова. В принципе, приводной блок 3 может работать также и пневматическим образом, что, однако, не изображено. Под представленным инструментом с вращающейся щёткой с корпусом 2 понимается в предпочтительном варианте инструмент с вращающейся щёткой с ручным управлением, то есть осуществлённый соответствующим образом переносной инструмент.
Щёточный агрегат имеет приводимый во вращательное движение держатель 5 щётки, отдельные стойки которого можно видеть на фиг. 1. На вертикальной или на горизонтальной поверхности держателя 5 щётки удерживается кольцевая щётка 6, 8 с венцом 6 с выступающими наружу щетинками 7 и при помощи приводного блока 3 приводится во вращательное движение. Этому соответствует обозначенное на фиг. 1 вращательное движение или направление D вращения против часовой стрелки. Отдельные щетинки 7 удерживаются посредством полотна 8 щётки и закреплены в полотне 8 кольцевой щётки 6, 8.
В примере осуществления в соответствии с фиг. 1 можно видеть ещё и стопорное средство 9, которое погружается во вращающийся венец 6 со щетинками или во вращающиеся щетинки 7. Стопорное средство 9 осуществлено в соответствии с примером осуществления с возможностью перемещения, и может перемещаться, в частности, в обозначенном на фиг. 1 двойной стрелкой радиальном направлении R. Как уже пояснено во вступлении и подробно описано в уровне техники в соответствии с EP 1 834 733 В1, щетинки 7 и при необходимости полотно 8 щётки при вращательном движении в направлении D вращения упруго деформируются в обозначенном на фиг. 1 посредством стрелки направлении против часовой стрелки при прохождении над стопорным средством 9. За счёт этого, в щетинках 7 или в полотне 8 щётки, вследствие соответствующей упругой деформации, аккумулируется энергия перемещения. При её высвобождении щетинки 7 обрабатывают поверхность заготовки 1, следовательно, не только в процессе вращения, но и одновременно в процессе соударения. Тогда после прохода стопорного средства 9 аккумулированная ранее энергия высвобождается.
В соответствии с изобретением кольцевая щётка 6, 8 осуществлена с возможностью перемещения, что в деталях схематично представляет фиг. 4. Фактически кольцевая щётка 6, 8 осуществлена с возможностью перемещения в аксиальном направлении с вибрацией. Это обеспечивается приводным блоком 3.
Для этой цели приводной блок 3 в соответствии с примером осуществления согласно фиг. 4 сначала однократно оснащается приводным колесом 10, чтобы обозначенную на фиг. 4 кольцевую щётку 6, 8 или держатель 5 щётки приводить во вращательное движение в соответствии с уже упомянутым ранее направлением D вращения. Для этого приводное колесо 10 работает на описываемую далее более детально вставную цапфу 12, которая входит в зацепление в полое отверстие 13 втулки В стационарной детали 5а подшипника в качестве составной части держателя 5 щётки. Наряду со стационарной деталью 5а подшипника реализована также и выполненная с возможностью аксиального перемещения деталь 5b щётки, к которой относится вставная цапфа 12. Посредством приводного блока 3 упомянутая вставная цапфа 12 не только приводится во вращательное движение для реализации поворотного движения D, но и дополнительно совершает также уже обозначенное ранее перемещение в аксиальном направлении А.
К тому же предусмотрен выполненный с возможностью вращения вокруг оси от приводного блока 3 эксцентрик 11´ на нагружаемом посредством приводного блока 3 эксцентриковом зубчатом колесе 11 в качестве следующей составной части. выполненной с возможностью перемещения детали 5b щётки. Эксцентрик 11´ воздействует посредством цапфы Z на вставную цапфу 12 в аксиальном направлении А. Вследствие этого, вставная цапфа 12, а также держатель 5 щётки осуществляют вибрирующее движение в аксиальном направлении А, в дополнение к поворотному движению D. Для того, чтобы совместно могли быть реализованы перемещение держателя 5 щётки в аксиальном направлении А и в дополнение его поворот в направлении D вращения, нагружаемое посредством приводного блока 3 приводное колесо 10 и эксцентриковое колесо 11 оснащены соответствующим зубчатым зацеплением для приведения в действие посредством приводного блока 3.
Как уже пояснено выше, держатель 5 щётки в соответствии с примером осуществления выполнен в целом двухкомпонентным. Фактически держатель 5 щётки имеет стационарную деталь 5а подшипника и выполненную с возможностью аксиального перемещения деталь 5b щётки. Стационарная деталь 5а подшипника имеет полое отверстие 13 для уже упомянутой цапфы Z подвижной детали 5b подшипника или зубчатого колеса 11. Кроме того, в полое отверстие 13 в зоне втулки В входит в зацепление вставная цапфа 12, при помощи которой, в конечном счёте, приводится в действие держатель 5 щётки.
Приводной блок 3 действует, между тем, как на приводное колесо 10, так и на эксцентриковое колесо 11. Посредством приводного колеса 10 втулка В переводится во вращательное движение. Это относится также к стационарной детали 5а подшипника. В полое отверстие 13 втулки В входит в зацепление вставная цапфа 12. Радиально предусмотренные на вставной цапфе 12 ламели 14 вставлены для этого в соответствующие пазы 14´ внутри полого отверстия 13. Благодаря этому, вставная цапфа 12 переводится во вращательное движение вдоль направления D вращения.
Дополнительное аксиальное перемещение вставной цапфы 12 в аксиальном направлении А и в соответствии с двойной стрелкой на фиг. 4 осуществляется, между тем, при помощи дополнительного эксцентрикового колеса 11. Для этого эксцентриковое колесо 11 также при помощи приводного блока 3 переводится во вращательное движение. Эксцентриковое колесо 11 имеет один или несколько радиально выступающих эксцентриков 11´, которые взаимодействуют со стационарной наклонной частью 2´ корпуса. Таким образом, вращательное движение эксцентрикового колеса 11, за счёт взаимодействия между эксцентриком 11´ и наклонной частью 2´ корпуса, преобразуется в аксиальное перемещение. Благодаря этому, входящая в зацепление в полое отверстие 13 цапфа Z также осуществляет аксиальное перемещение в направлении А.
Цапфа Z оказывает, между тем, действие на вставную цапфу 12 своей закруглённой головкой, так что вставная цапфа 12 дополнительно к своему вращательному движению в направлении D вращения осуществляет требуемое аксиальное перемещение в аксиальном направлении А. Это возможно, так как ламели 14 в соответствующих пазах 14´в радиальном направлении входят в зацепление друг с другом, одновременно, однако, допуская требуемое аксиальное перемещение вставной цапфы 12 в аксиальном направлении А. Дополнительная пружина 15 способствует тому, что осуществляется аксиальное перемещение вставной цапфы 12 против усилия пружины 15, которое, соответственно, возвращает вставную цапфу 12 обратно.
На фиг. 2 представлен, между тем, первый пример осуществления того, как стопорное средство 9 перемещается в радиальном направлении R относительно венца 6 со щетинками 7 или относительно щетинок 7. Для этого стопорное средство 9 присоединяется к ручке 16, в отверстие которой погружается эксцентрик 17. Эксцентрик 17, со своей стороны, приводится во вращательное движение при помощи приводного блока 3. Посредством вращения эксцентрика 17 в отверстии ручки 16, в сочетании с дополнительной направляющей 18 ручки 16 стопорное средство 9 перемещается в радиальном направлении R и при необходимости также в направлении U периферии относительно венца 6 со щетинками или относительно щетинок 7, как поясняют соответствующие стрелки на фиг. 2.
Фиг. 3 демонстрирует, между тем, другой вариант для перемещения стопорного средства 9 в радиальном направлении R относительно кольцевой щётки 6, 8 или щетинок 7. Для этого стопорное средство 9 присоединено к линейному регулировочному механизму 19, 20. Линейный регулировочный механизм 19, 20 собирается из стационарной шпиндельной гайки 19 и входящего в зацепление в шпиндельную гайку 19 и осуществляющего возвратно-поступательные движения шпинделя 20. Вращательные движения шпинделя 20 приводят, соответственно, к тому, что ручка 16, на которой располагается стопорное средство 9, перемещается в данном случае в обозначенном на фиг. 3 линейном направлении, которое согласно примеру осуществления соответствует радиальному направлению R относительно кольцевой щётки 6, 8 или щетинок 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки поверхности заготовки | 2019 |
|
RU2723122C1 |
| Головка электрической зубной щётки | 2021 |
|
RU2840186C1 |
| Способ очистки стекол окон снаружи высотного здания и стеклоочиститель для его осуществления | 2024 |
|
RU2833048C1 |
| ЩЕТОЧНЫЙ АГРЕГАТ, ВРАЩАТЕЛЬНЫЙ ЩЕТОЧНЫЙ ИНСТРУМЕНТ И СПОСОБ ОБРАБОТКИ ПОВЕРХНОСТИ ДЕТАЛИ ЩЕТОЧНЫМ АГРЕГАТОМ | 2007 |
|
RU2428906C2 |
| Устройство для очистки полувагонов от остатков сыпучих грузов | 2022 |
|
RU2784124C1 |
| Устройство для испытания покрытий на износостойкость | 2023 |
|
RU2799993C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА, СОДЕРЖАЩЕЕ ЗВУКОВОЙ КАНАЛ | 2016 |
|
RU2706824C2 |
| ЗУБНАЯ ЩЕТКА С ПРИВОДОМ И С ВРАЩАЮЩИМИСЯ ЧАСТЯМИ | 2003 |
|
RU2312637C2 |
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЁТКА И СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ, УСТРОЙСТВО, СИСТЕМА, ПЛАТА УПРАВЛЕНИЯ И НОСИТЕЛЬ ДЛЯ НЕЁ | 2024 |
|
RU2840672C1 |
| Устройство для предотвращения наледей и сосулек | 2022 |
|
RU2797420C1 |
Изобретение относится к инструментам для обработки поверхности заготовки. Инструмент выполнен с вращающейся щеткой с ручным управлением, со щеточным агрегатом и приводным блоком (3) для щеточного агрегата. Щеточный агрегат для обработки поверхности заготовки выполнен с приводимым во вращательное движение держателем (5) щетки и с кольцевой щеткой с венцом с выступающими наружу щетинками. Кольцевая щетка выполнена с возможностью перемещения с вибрацией и аксиального перемещения. Для аксиального перемещения кольцевой щетки держатель (5) щетки выполнен по меньшей мере двухкомпонентным со стационарной деталью (5а) подшипника и выполненной с возможностью аксиального перемещения деталью (5b) щетки. Стационарная деталь (5а) подшипника имеет втулку (В) для входящей в нее в зацепление и для выполненной с возможностью аксиального перемещения деталью (5b) щетки вставной цапфы (12), которая приводится во вращательное движение и аксиально нагружается со стороны приводного блока (3) с помощью приводимого во вращение держателя (5) щетки. Предусмотрен выполненный с возможностью вращения вокруг оси от приводного блока (3) эксцентрик (11') на нагружаемом посредством приводного блока (3) эксцентриковом зубчатом колесе (11) в качестве следующей составной части, выполненной с возможностью перемещения детали (5b) щетки. Эксцентрик (11') выполнен с возможностью воздействия посредством цапфы (Z) на вставную цапфу (12) в аксиальном направлении (А). Техническим результатом изобретения является создание щёточного агрегата для обработки поверхности заготовки с образованием однородно обработанной поверхности. 5 з.п. ф-лы, 4 ил.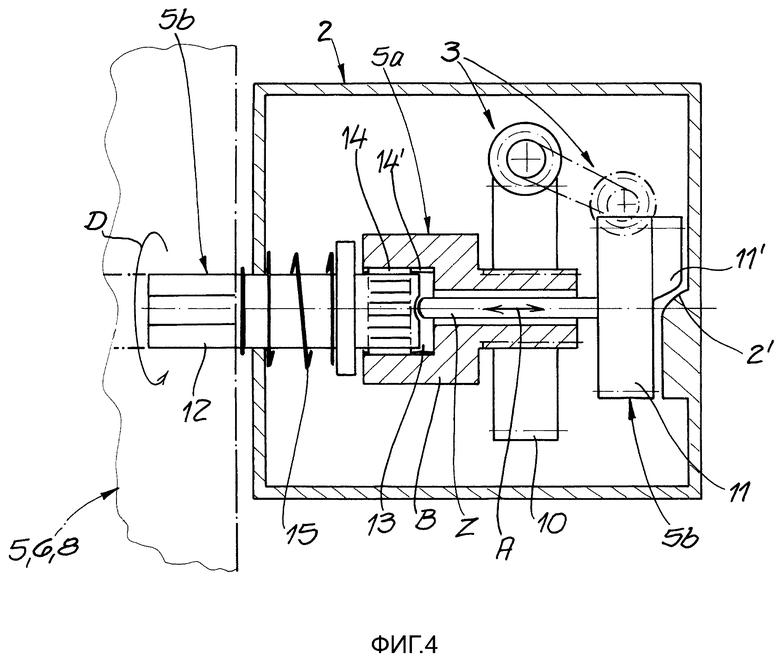
1. Инструмент с вращающейся щеткой с ручным управлением, со щеточным агрегатом и приводным блоком (3) для щеточного агрегата, причем щеточный агрегат для обработки поверхности заготовки (1) выполнен с приводимым во вращательное движение держателем (5) щетки и с кольцевой щеткой (6, 8) с венцом (6) с выступающими наружу щетинками (7), причем кольцевая щетка (6, 8) выполнена с возможностью аксиального перемещения с вибрацией, причем для аксиального перемещения кольцевой щетки (6, 8) держатель (5) щетки выполнен по меньшей мере двухкомпонентным со стационарной деталью (5а) подшипника и выполненной с возможностью аксиального перемещения деталью (5b) щетки,
стационарная деталь (5а) подшипника имеет втулку (В) и входящую в нее с зацеплением, выполненную с возможностью аксиального перемещения деталь (5b) щетки вставной цапфы (12), которая приводится во вращательное движение и аксиально нагружается со стороны приводного блока (3) с помощью приводимого во вращение держателя (5) щетки, при этом предусмотрен выполненный с возможностью вращения вокруг оси от приводного блока (3) эксцентрик (11') на нагружаемом посредством приводного блока (3) эксцентриковом зубчатом колесе (11) в качестве составной части, выполненной с возможностью перемещения детали (5b) щетки, причем
эсцентрик (11') выполнен с возможностью воздействия посредством цапфы (Z) на вставную цапфу (12) в аксиальном направлении (А).
2. Инструмент с вращающейся щеткой по п. 1, отличающийся тем, что стационарная деталь (5а) подшипника имеет полое отверстие (13) для входящей в него в зацепление цапфы (Z), выполненной с возможностью перемещения детали (5b) щетки.
3. Инструмент с вращающейся щеткой по п. 1 или 2, отличающийся тем, что предусмотрено погружаемое во вращающийся венец (6) со щетинками стопорное средство (9), которое предназначено для упругого деформирования щетинок (7) и/или щеточного полотна (8) в качестве составной части кольцевой щетки (6, 8) с сохранением кинетической энергии.
4. Инструмент с вращающейся щеткой по п. 3, отличающийся тем, что стопорное средство (9) выполнено с возможностью перемещения.
5. Инструмент с вращающейся щеткой по п. 4, отличающийся тем, что стопорное средство (9) выполнено с возможностью перемещения в радиальном направлении (R) относительно оси кольцевой щетки (6, 8).
6. Инструмент с вращающейся щеткой по любому из пп. 1-5, отличающийся тем, что стопорное средство (9) перемещается посредством эксцентрика (17) и/или линейного регулировочного механизма (19, 20).
| ЩЕТОЧНЫЙ АГРЕГАТ, ВРАЩАТЕЛЬНЫЙ ЩЕТОЧНЫЙ ИНСТРУМЕНТ И СПОСОБ ОБРАБОТКИ ПОВЕРХНОСТИ ДЕТАЛИ ЩЕТОЧНЫМ АГРЕГАТОМ | 2007 |
|
RU2428906C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТЕНДОМ ДЛЯ ШЕРОХОВКИ ПОВЕРХНОСТИ ЛИСТА | 1990 |
|
RU2009833C1 |
| ЩЕТКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ | 1998 |
|
RU2136199C1 |
| ЩЕТОЧНАЯ МАШИНА | 2011 |
|
RU2570860C2 |
| US 5386608 A, 07.02.1995 | |||
| DE 19860190 A1, 05.08.1999 | |||
| DE 102004041134 A1, 02.03.2006. | |||
