[0001] Настоящее изобретение относится к грузовым автомобилям, в частности, к самосвалам, таким как внедорожные самосвалы, используемые в горнодобывающей промышленности, или к дорожным или внедорожным самосвалам, используемым для перемещения грунта.
Уровень техники
[0002] Традиционные самосвалы содержат раму, опирающуюся на по меньшей мере две оси. По меньшей мере передняя ось содержит систему рулевого управления для изменения угла поворота передних колес. По меньшей мере задняя ось содержит двигательную систему, такую как электрический тяговый двигатель.
[0003] В традиционных самосвалах предусмотрена кабина, из которой водитель управляет самосвалом. В некоторых самосвалах дополнительно предусмотрен автономный режим.
Сущность изобретения
[0004] Целью настоящего изобретения является разработка улучшенной концепции для самосвала, в частности, для дорожного или внедорожного самосвала. Цели могут включать в себя более высокую эффективность работы, более высокую производительность, снижение затрат на техническое обслуживание, снижение затрат на тонну и уменьшенную сложность.
[0005] Эти и другие цели могут быть достигнуты посредством вариантов осуществления настоящего изобретения.
[0006] В настоящем изобретении разработаны концепции для одноосного самосвала.
[0007] В одном аспекте самосвал может иметь одиночную ось, и загруженная масса может быть подвешена над осью. Концепция изобретения может быть основана на конструкции перевернутого маятника с элементами управления, пригодными для сохранения устойчивости. Связанное с этим уменьшение количества компонентов и структур, необходимых для соединения двух осей, обеспечивает высокое отношение полезной нагрузки к массе пустого транспортного средства и приводит к более высокой эффективности работы, более высокой производительности, к снижению затрат на техническое обслуживание, снижению затрат на тонну и к меньшей сложности.
[0008] В одном аспекте, рулевое управление может осуществляться на основе разности скоростей колес. В результате самосвал может иметь нулевой радиус поворота для маневренности и эффективности. Исключение компонентов рулевого управления, обычно необходимых для самосвалов, может уменьшить затраты, вес и сложность.
[0009] В одном аспекте самосвал может перемещаться в любом направлении без предпочтения для сведения к минимуму маневрирования и времени, требующегося для цикла транспортировки во время нормального режима работы.
[0010] В одном аспекте может быть предусмотрен способ стабилизации одноосного самосвала посредством опорных ножек с гидравлическим или электрическим приводом для сохранения при необходимости самосвала в вертикальном положении. Такие ножки не требуют снабжения энергией после их установки, могут повысить эффективность и снизить эксплуатационные расходы самосвала.
[0011] В одном аспекте самосвал может представлять собой самосвал, содержащий саморазгружающийся кузов, установленный с возможностью поворота на раме. Подъем саморазгружающегося кузова может быть выполнен посредством цилиндра гидроподъемника.
[0012] В одном аспекте самосвал может быть снабжен энергией от многочисленных источников энергии, включающих в себя дизель, устройство для электрохимического аккумулирования энергии, конденсаторы, токосъемное устройство и другие или их комбинации.
[0013] В одном аспекте обеспечивается автономное управление самосвалом, и функции, связанные с оператором и его комфортом, могут быть удалены вместе по меньшей мере с одним из компонентов рулевого управления, компонентов подвески и компонентов основной рамы, которые традиционно имеют отношение к двум или более осям. Это обеспечивает создание более простой конструкции, которая имеет более низкую себестоимость, требует меньшего обслуживания, имеет более быстрые циклы транспортировки, более высокую полезную нагрузку, большую производительность и, следовательно, более низкую стоимость на тонну.
[0014] Автономно управляемый самосвал может использовать заданную траекторию для перемещения из стартового положения в конечное положение. Может быть предусмотрена система управления транспортным средством, которая определяет текущее положение самосвала и управляет самосвалом при перемещении по заданной траектории.
Краткое описание чертежей
[0015] На чертежах:
[0016] фиг.1 представляет собой схематическое изображение, показывающее функциональные части варианта осуществления самосвала,
[0017] фиг.2 представляет собой схематическое изображение системы управления вариантом осуществления самосвала,
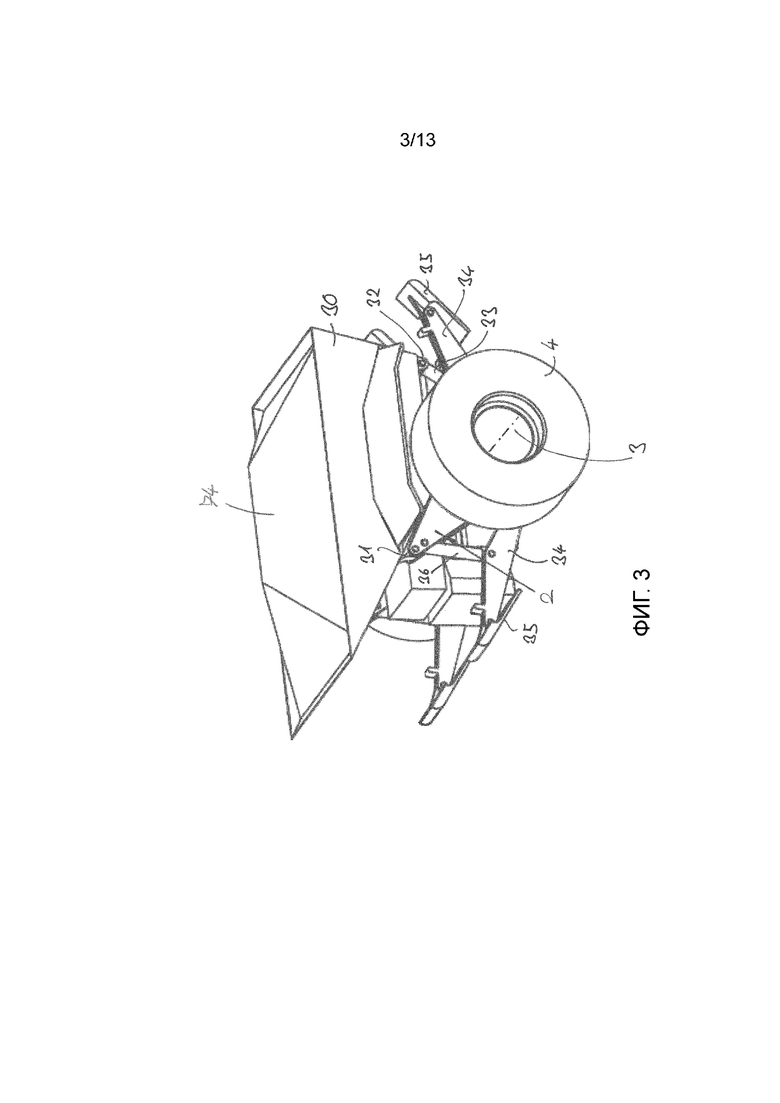
[0018] фиг.3 представляет собой вид в перспективе первой механической концепции самосвала,
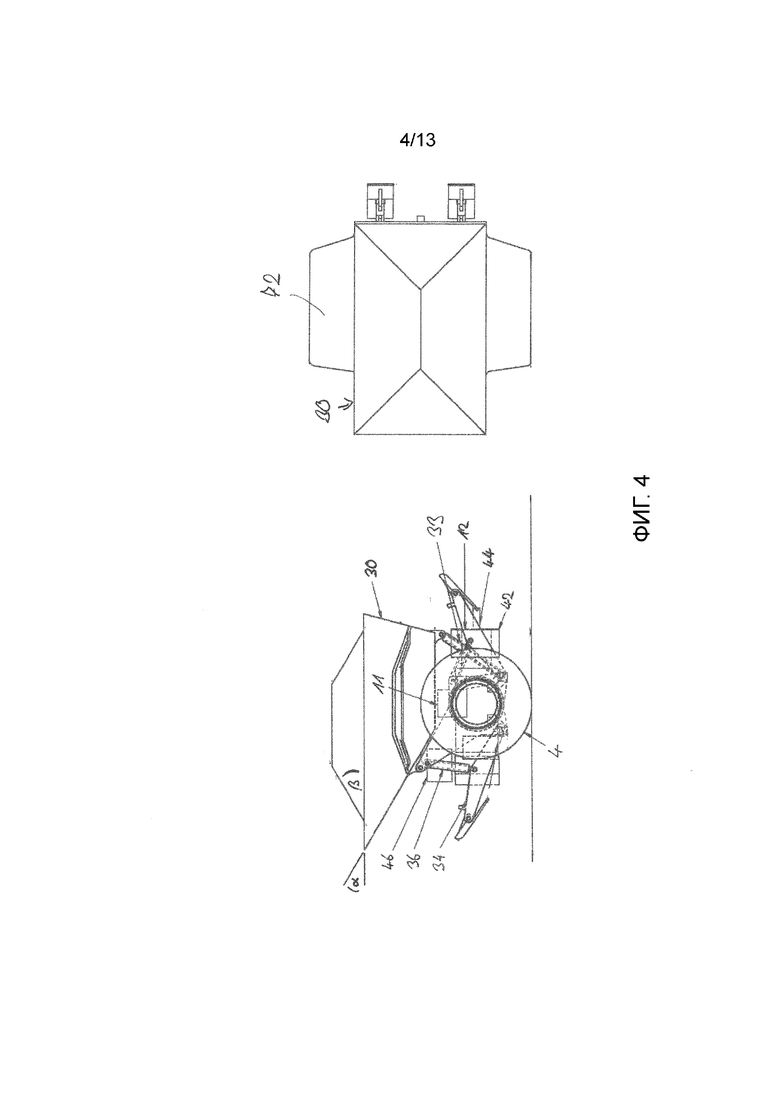
[0019] фиг.4 представляет собой вид сбоку и вид сверху первой механической концепции самосвала,
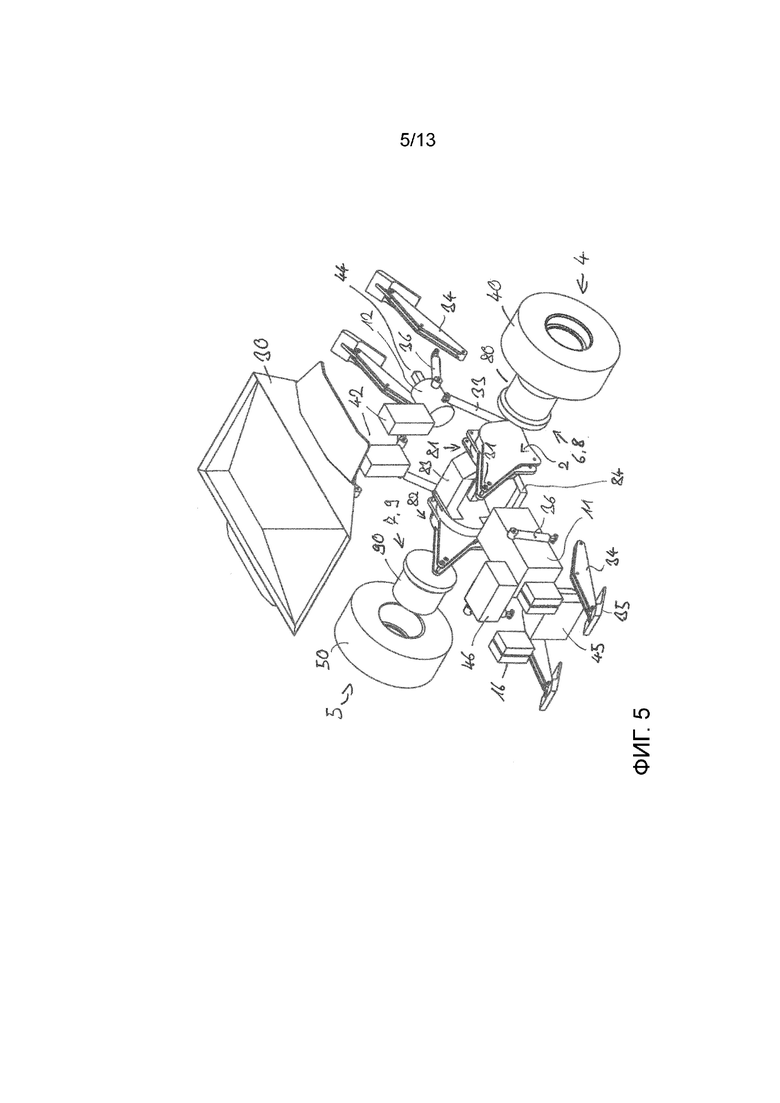
[0020] фиг.5 представляет собой поэлементное изображение первой механической концепции самосвала,
[0021] фиг.6 представляет собой вид сверху, вид в перспективе и вид сбоку первой механической концепции самосвала с саморазгружающимся кузовом в поднятом положении,
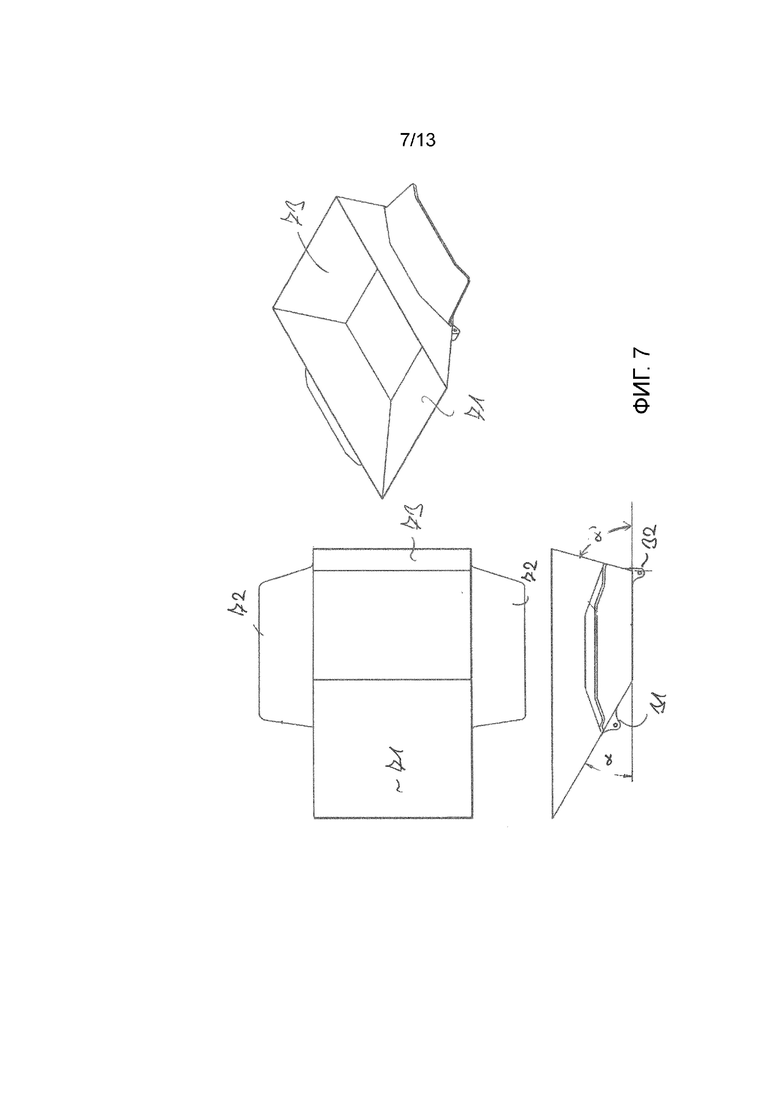
[0022] фиг.7 представляет собой вид сверху, вид в перспективе и вид сбоку саморазгружающегося кузова первой механической концепции самосвала,
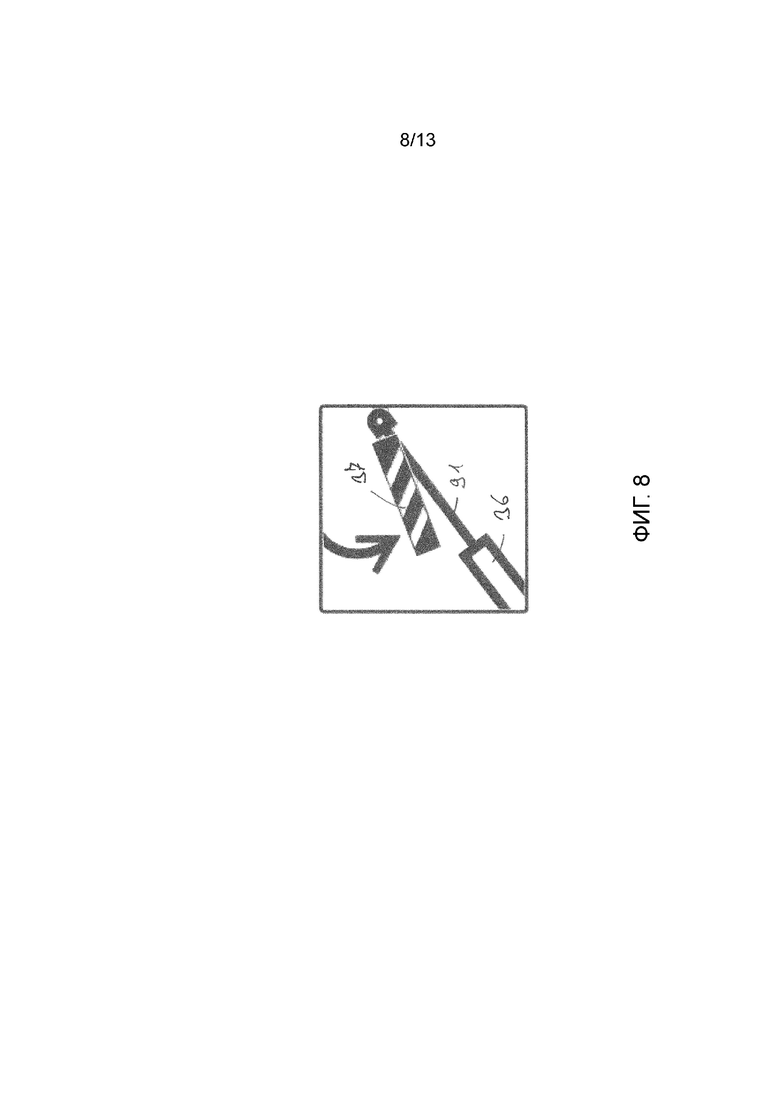
[0023] фиг.8 представляет собой схематическое изображение блокирующего кронштейна для опорных ножек для первой механической концепции самосвала,
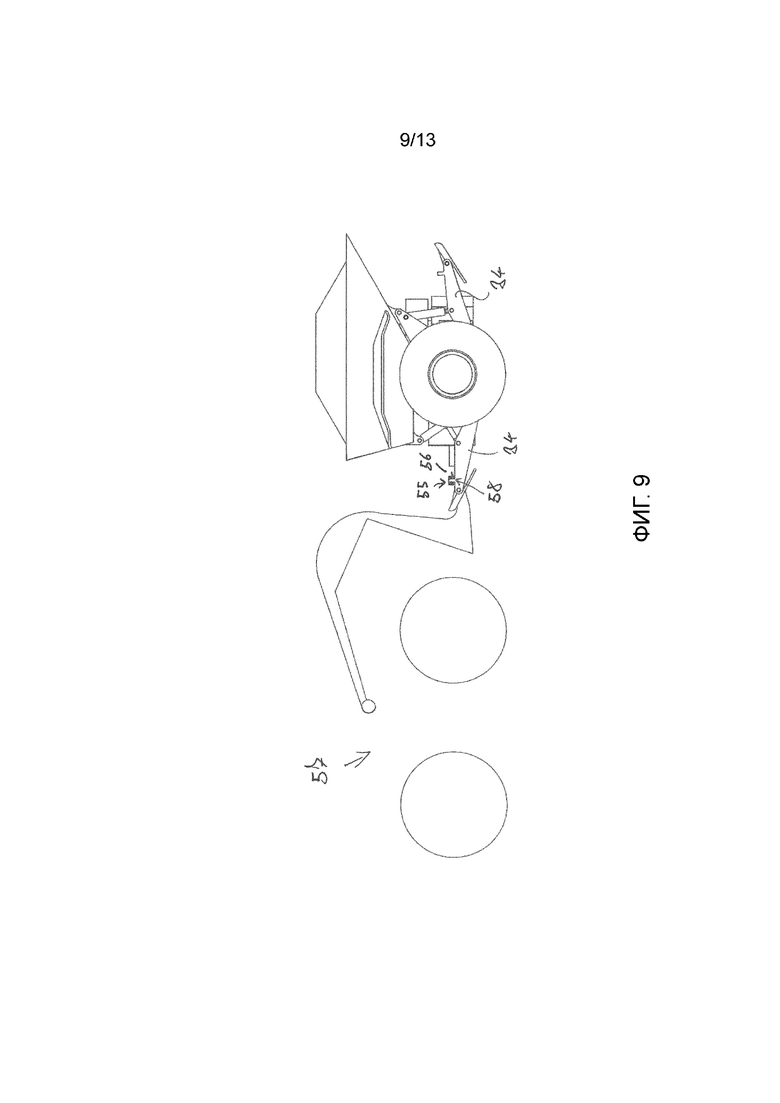
[0024] фиг.9 представляет собой вид сбоку буксировочной концепции для первой механической концепции самосвала,
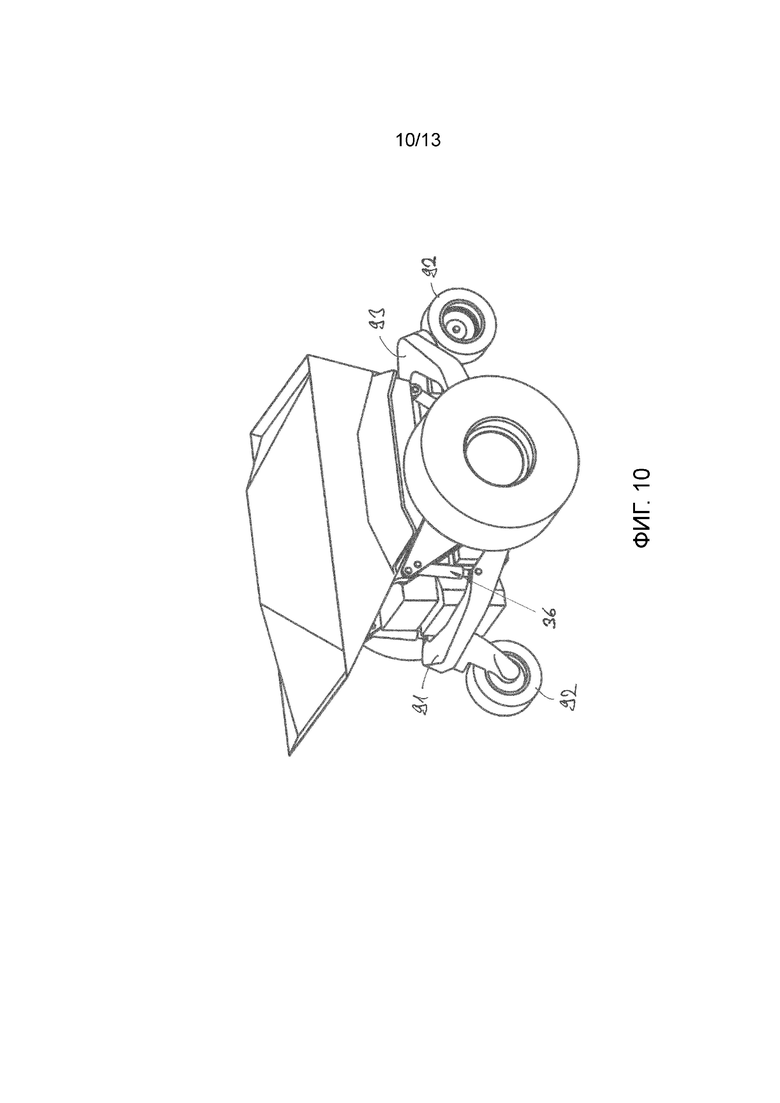
[0025] фиг.10 представляет собой вид в перспективе второй механической концепции самосвала,
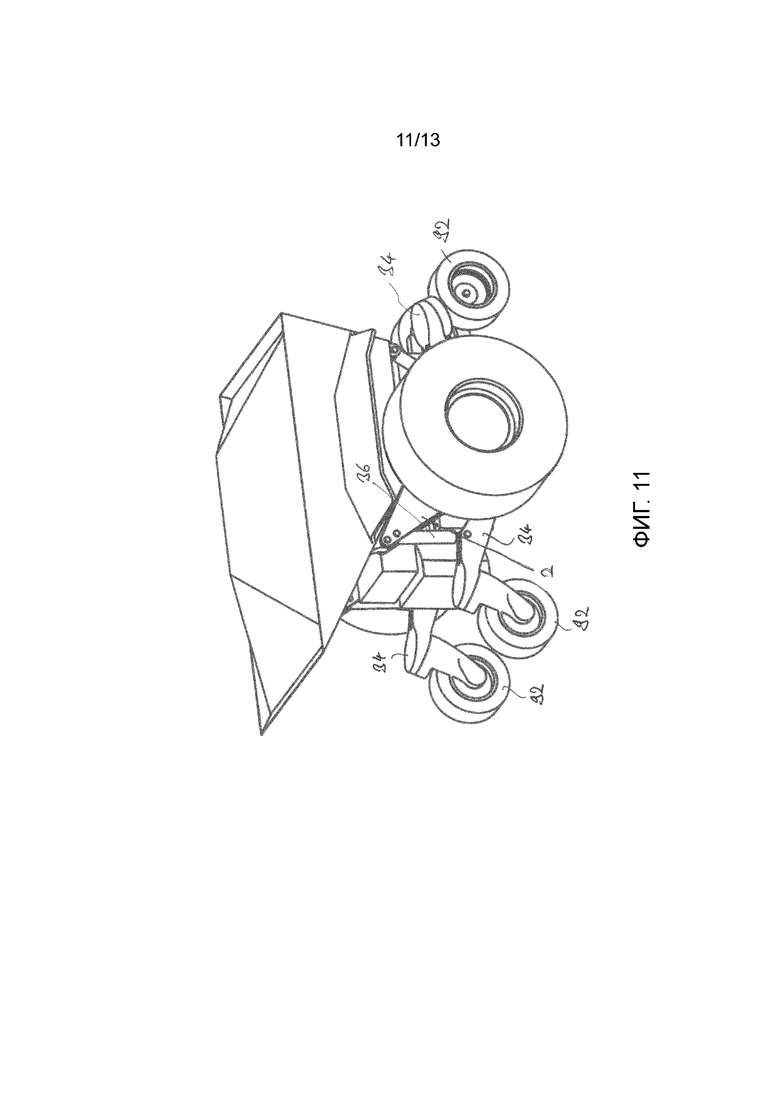
[0026] фиг.11 представляет собой вид в перспективе третьей механической концепции самосвала,
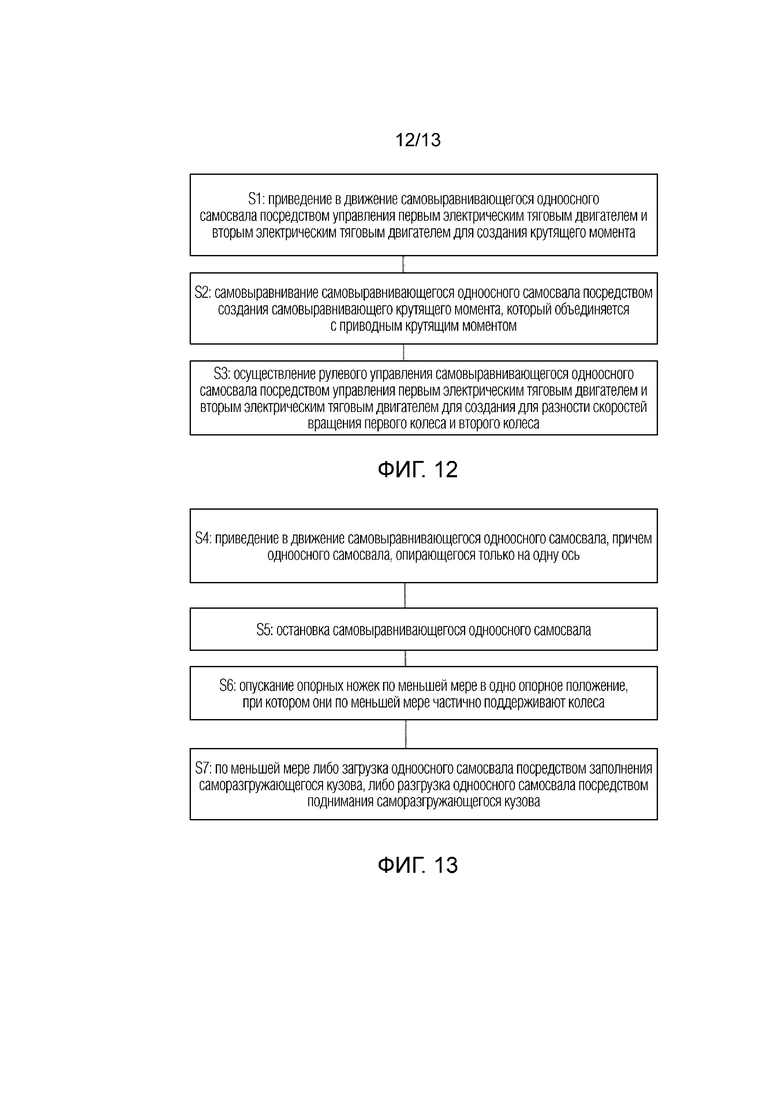
[0027] фиг.12 представляет собой схему, показывающую действия первого варианта осуществления способа управления самосвалом,
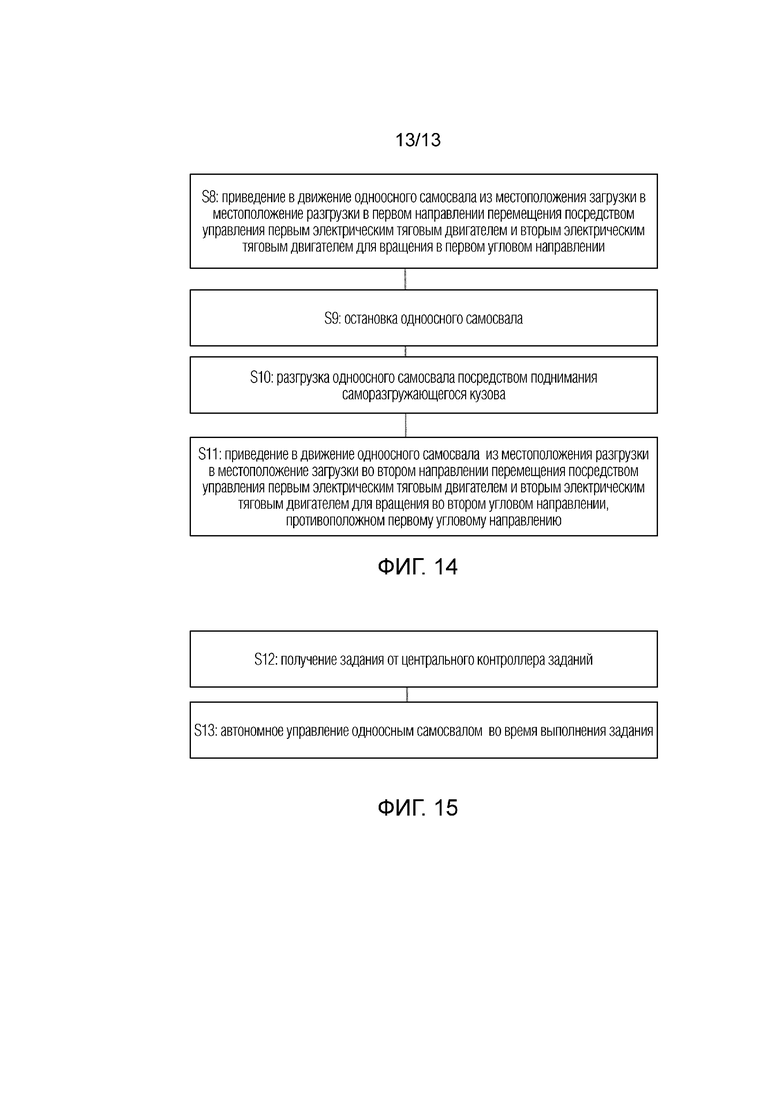
[0028] фиг.13 представляет собой схему, показывающую действия второго варианта осуществления способа управления самосвалом,
[0029] фиг.14 представляет собой схему, показывающую действия третьего варианта осуществления способа управления самосвалом, и
[0030] фиг.15 представляет собой схему, показывающую действия четвертого варианта осуществления способа управления самосвалом.
Подробное описание вариантов осуществления изобретения
[0031] На фиг.1 и 2 показаны функциональные части варианта осуществления самовыравнивающегося одноосного самосвала 1 и системы управления такого самосвала. На фиг.3-11 показаны механические конструктивные аспекты варианта осуществления самовыравнивающегося одноосного самосвала 1.
[0032] Самовыравнивающийся одноосный самосвал 1 может содержать раму 2 и саморазгружающийся кузов 30, установленный с возможностью поворота на раме 2. В частности, саморазгружающийся кузов 30 может быть расположен на раме 2 с горизонтальной осью 31 вращения. Саморазгружающийся кузов 30 может быть заполнен материалом, схематически показанным в виде кучи 74. Поднимание саморазгружающегося кузова 30 может быть выполнено посредством по меньшей мере одного поднимающего исполнительного механизма 33. При поднимании саморазгружающегося кузова материал, содержащийся в саморазгружающемся кузове, может выскальзывать из саморазгружающегося кузова. В варианте осуществления для поднимания саморазгружающегося кузова 30 может быть предусмотрен, например, по меньшей мере один исполнительный механизм 33 в виде гидравлического цилиндра.
[0033] Самовыравнивающийся одноосный самосвал 1 может дополнительно содержать систему обеспечения движения и самовыравнивания, содержащую одиночную ось 3, поддерживающую раму 2 по меньшей мере во время движения выравнивающегося одноосного самосвала 1, причем одиночную ось 3, содержащую по меньшей мере первое колесо 4 и второе колесо 5, и по меньшей мере первый электрический тяговый двигатель 6 для приведения в действие первого колеса 4 и второй электрический тяговый двигатель 7 для приведения в действие второго колеса 5. Масса самовыравнивающегося одноосного самосвала 1 может быть подвешена над одиночной осью, как в незагруженном состоянии, так и в загруженном состоянии.
[0034] В варианте осуществления самовыравнивающийся одноосный самосвал 1 может дополнительно содержать систему 19 рулевого управления, выполненную с возможностью управления первым электрическим тяговым двигателем 6 и вторым электрическим тяговым двигателем 7 и с возможностью рулевого управления одноосным самосвалом 1 на основе разности скоростей вращения первого колеса 4 и второго колеса 5.
[0035] В варианте осуществления система рулевого управления может быть выполнена с возможностью управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем для вращения в противоположных направлениях вращения.
[0036] В варианте осуществления самовыравнивающийся одноосный самосвал 1 может дополнительно содержать систему управления самовыравниванием, содержащую датчик 21 и контроллер 20, выполненную с возможностью управления первым электрическим тяговым двигателем 6 и вторым электрическим тяговым двигателем 7 и с возможностью выравнивания одноосного самосвала 1 для приведения его в положение равновесия посредством управления первым электрическим тяговым двигателем 6 и вторым электрическим тяговым двигателем 7 в зависимости от сигнала, получаемого от датчика 21. В варианте осуществления датчик 21 может представлять собой один датчик или комбинацию из нескольких следующих датчиков: акселерометра, инклинометра, магнетометра, гироскопа, углового энкодера для измерения угловой скорости и углового положения колеса, радара/лидара для наземного измерения, глобальной системы позиционирования GPS для определения направления/скорости/местоположения, датчиков давления для измерения полезной нагрузки, датчиков линейных перемещений для измерения местоположения опорной ножки, соответствующих датчиков для автономно управления. В варианте осуществления датчик может представлять собой инерционный измерительный блок.
[0037] В варианте осуществления контроллер 20 может представлять собой микрокомпьютер, включающий в себя микропроцессорный блок, порты ввода/вывода, электронный носитель информации для выполняемых программ (например, выполняемых команд), и постоянное запоминающее устройство для долговременного хранения информации. Контроллер может быть соединен с различными компонентами систем транспортного средства через канал связи или шину данных.
[0038] В варианте осуществления контроллер 20 системы управления самовыравниванием может быть выполнен с возможностью обработки выходного сигнала датчика 21 для определения наклона самовыравнивающегося одноосного самосвала и для управления первым электрическим тяговым двигателем 6 и вторым электрическим тяговым двигателем 7 для сохранения необходимого наклона.
[0039] Необходимый наклон может представлять собой наклон в состоянии равновесия, определяемый самовыравнивающимся одноосным самосвалом в зависимости от распределения нагрузки на самовыравнивающемся одноосном самосвале. В частности, наклон в состоянии равновесия может быть определен так, чтобы центр тяжести располагался над одиночной осью для сохранения одноосного самосвала в состоянии равновесия. Распределение нагрузки может изменяться во время работы транспортного средства, так что наклон в состоянии равновесия может в равной степени изменяться. Это может происходить из-за несбалансированной загрузки саморазгружающегося кузова самосвала материалом. При работе с незагруженным кузовом распределение нагрузки может изменяться из-за мусора, накапливающегося на самосвале, материала, остающегося в саморазгружающемся кузове после операции разгрузки, который прилипает к саморазгружающемуся кузову, или из-за использования топлива.
[0040] Наклон в состоянии равновесия может быть определен на основе угловой скорости колеса и/или на основе данных от других датчиков, таких как тензодатчики на саморазгружающемся кузове для определения условий загрузки саморазгружающегося кузова. Система управления транспортным средством может управлять первым электрическим тяговым двигателем 6 и вторым электрическим тяговым двигателем 7 для сохранения наклона, являющегося наклоном в состоянии равновесия, если не требуется углового ускорения вокруг одиночной оси.
[0041] Максимальный наклон в состоянии равновесия, обеспечиваемый системой управления транспортного средства, может составлять более 2 градусов в обоих направлениях, более 4 градусов в обоих направлениях или более 5 градусов в обоих направлениях. Максимальный наклон в состоянии равновесия, обеспечиваемый системой управления транспортного средства, может составлять менее 20 градусов в обоих направлениях, менее 12 градусов в обоих направлениях или менее 8 градусов в обоих направлениях.
[0042] Необходимый наклон может дополнительно представлять собой наклон при ускорении, определяемый самовыравниванием одноосного самосвала на основе углового ускорения одиночной оси, необходимого для ускорения одноосного самосвала и/или приведения в движение самовыравнивающегося одноосного самосвала на поверхности земли, имеющей уклон. В частности, если необходимо угловое ускорение вокруг одиночной оси, наклон при ускорении может определяться таким образом, чтобы центр тяжести располагался перед или за одиночной осью, чтобы создавать угловое ускорение вокруг одиночной оси, которое противодействует угловому ускорению, создаваемому тяговыми двигателями для ускорения одноосного самосвала и/или для приведения в движение самовыравнивающегося одноосного самосвала на поверхности земли, имеющей уклон.
[0043] Максимальный наклон при ускорении, обеспечиваемый системой управления транспортного средства, может составлять более 10 градусов в обоих направлениях, более 15 градусов в обоих направлениях или более 20 градусов в обоих направлениях. Максимальный наклон при ускорении, обеспечиваемый системой управления транспортного средства, может составлять менее 40 градусов в обоих направлениях, мене 35 градусов в обоих направлениях или менее 30 градусов в обоих направлениях.
[0044] В варианте осуществления система управления самовыравниванием может быть выполнена с возможностью управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем с обеспечением изменения наклона одноосного самосвала в зависимости по меньшей мере либо от ускорения самовыравнивающегося одноосного самосвала, либо от уклона поверхности земли, по которой перемещается самовыравнивающийся одноосный самосвал.
[0045] В варианте осуществления система управления самовыравниванием может быть выполнена таким образом, чтобы самосвал наклонялся вперед в направлении движения при положительном ускорении и назад против направления движения при торможении.
[0046] В варианте осуществления система управления самовыравниванием может быть выполнена таким образом, чтобы при перемещении по поверхности земли, имеющей уклон, самосвал наклонялся в направлении положительного уклона, то есть к стороне склона.
[0047] В варианте осуществления самовыравнивающийся одноосный самосвал 1 может дополнительно содержать систему 10 управления для управления одноосным самосвалом 1 в автономном режиме.
[0048] В варианте осуществления система 10 управления может быть выполнена с возможностью дистанционной связи с центральным контроллером 100 задач для приема задачи и автономного управления одноосным самосвалом 1 в процессе выполнения задачи.
[0049] В варианте осуществления рама может быть выполнена без кабины для водителя. Поэтому во время работы одноосный самосвал 1 также может работать в автономном режиме или в режиме дистанционного управления.
[0050] В варианте осуществления самовыравнивающийся одноосный самосвал 1 может дополнительно содержать опорные ножки 34, расположенные на раме 2, и по меньшей мере исполнительный механизм 36 для опускания опорных ножек по меньшей мере в первое опорное положение, при котором они по меньшей мере частично поддерживают раму 2, и для поднимания опорных ножек 34 по меньшей мере в одно приводное положение, при котором рама 2 опирается только на одиночную ось 3.
[0051] В варианте осуществления исполнительный механизм 36 может быть выполнен с возможностью опускания опорных ножек 34 во второе опорное положение, при котором по меньшей мере либо первое колесо 4, либо второе колесо 5 одиночной оси 3 поднимают с поверхности земли.
[0052] В варианте осуществления по меньшей мере один исполнительный механизм 36 может содержать блокирующий кронштейн 37 для механического блокирования опорных ножек 34 по меньшей мере в одном опорном положении. Исполнительный механизм 36, например, может представлять собой гидравлический исполнительный механизм или электрический исполнительный механизм.
[0053] В варианте осуществления самовыравнивающийся одноосный самосвал 1 может дополнительно содержать систему 18 управления, предназначенную для управления по меньшей мере одним исполнительным механизмом 36, причем систему 18 управления, выполненную с возможностью изменения высоты расположения опорных ножек 34 во время приведения в движение.
[0054] В варианте осуществления система управления, предназначенная для управления по меньшей мере одним исполнительным механизмом, выполнена с возможностью изменения высоты расположения опорных ножек 34 в зависимости по меньшей мере либо от ускорения самовыравнивающегося одноосного самосвала 1, либо от уклона поверхности земли, по которой перемещается одноосный самосвал 1.
[0055] В варианте осуществления система управления, предназначенная для управления по меньшей мере одним исполнительным механизмом 36, выполнена с возможностью изменения высоты расположения опорных ножек 34 для сохранения расстояния опорных ножек относительно поверхности земли в диапазоне допустимых расстояний и/или на допустимом расстоянии. В варианте осуществления любое допустимое расстояние из диапазона допустимых расстояний и/или допустимое расстояние может составлять более 10 сантиметров или более 25 сантиметров.
[0056] В варианте осуществления одноосный самосвал имеет по меньшей мере одну переднюю опорную ножку 34 и по меньшей мере одну заднюю опорную ножку 34.
[0057] В варианте осуществления система управления, предназначенная для управления по меньшей мере одним исполнительным механизмом 36, выполнена с возможностью расположения по меньшей мере одной передней опорной ножки на первой высоте расположения и по меньшей мере одной задней опорной ножки на второй высоте расположения, отличающейся от первой высоты расположения.
[0058] В варианте осуществления система управления, предназначенная для управления по меньшей мере одним исполнительным механизмом 36, может быть выполнена с возможностью поднимания опорных ножек в приводное положение, при котором они не входят в соприкосновение с поверхностью земли на старте приведения в движение и удерживания опорных ножек от соприкосновения с поверхностью земли во время штатного движения.
[0059] В варианте осуществления система управления, предназначенная для управления по меньшей мере одним исполнительным механизмом 36, может быть выполнена с возможностью опускания опорных ножек по меньшей мере с одной продольной стороны одноосного самосвала в случаях, когда система управления самовыравниванием не обеспечивает сохранение баланса одноосного самосвала посредством управления тяговыми двигателями, в частности, во время аварийных ситуаций.
[0060] В варианте осуществления в опорных ножках 34 предусмотрены платформы 35 для ножек.
[0061] В варианте осуществления в опорных ножках 34 предусмотрены самоустанавливающиеся колеса 92.
[0062] В варианте осуществления самовыравнивающийся одноосный самосвал 1 может дополнительно содержать в качестве основного источника питания двигатель 11 внутреннего сгорания и альтернатор 12, приводимый в действие двигателем 11 внутреннего сгорания для выработки электроэнергии для приведения в действие первого электрического тягового двигателя 6 и второго электрического тягового двигателя 7.
[0063] В варианте осуществления двигатель 11 внутреннего сгорания может представлять собой дизельный двигатель.
[0064] В варианте осуществления выходной вал 19 двигателя 11 внутреннего сгорания может быть механически связан с паразитной нагрузкой 14, такой как гидравлический насос, вентилятор и/или система охлаждения. Механическая связь 15 может быть выполнена, например, по меньшей мере либо через ременную передачу, либо через прямое соединение, либо через коробку передач, либо через приводной вал, либо через прямое шлицевое соединение.
[0065] В варианте осуществления самовыравнивающийся одноосный самосвал 1 может содержать в качестве основного источника питания аккумулятор для обеспечения электроэнергией для приведения в действие первого электрического тягового двигателя и второго электрического тягового двигателя. Самовыравнивающийся одноосный самосвал 1, в частности, может быть выполнен в виде автомобиля на аккумуляторном источнике питания, то есть без двигателя внутреннего сгорания.
[0066] В варианте осуществления самовыравнивающийся одноосный самосвал 1 может дополнительно содержать систему 16 накопления электроэнергии для сохранения электроэнергии для подачи дополнительной мощности к первому электрическому тяговому двигателю 6 и ко второму электрическому тяговому двигателю 7 в случае балансировки массы.
[0067] В варианте осуществления самовыравнивающийся одноосный самосвал 1 может дополнительно содержать систему 17 управления электроэнергией, выполненную с возможностью использования, в режиме полной мощности, максимально возможной мощности от двигателя 11 внутреннего сгорания и/или от аккумулятора для приведения в движение самовыравнивающегося одноосного самосвала 1 и для обеспечения, в режиме полной мощности, дополнительной мощности для случаев неожиданной балансировки массы по меньшей мере либо от системы 16 накопления электроэнергии, либо от резерва мощности двигателя 11 внутреннего сгорания и/или аккумулятора.
[0068] В варианте осуществления максимально допустимая мощность от двигателя 11 внутреннего сгорания может представлять собой максимально возможную мощность от работы двигателя 11 внутреннего сгорания. В альтернативном варианте осуществления максимально допустимая мощность от двигателя 11 внутреннего сгорания может быть меньше, чем максимально возможная мощность от работы двигателя 11 внутреннего сгорания.
[0069] В варианте осуществления система 16 накопления электроэнергии может содержать суперконденсаторы.
[0070] В варианте осуществления самовыравнивающийся одноосный самосвал 1 может дополнительно содержать электрический замедлитель, соединенный с первым электрическим тяговым двигателем 6 и со вторым электрическим тяговым двигателем 7 для торможения одноосного самосвала 1 по меньшей мере в первом режиме торможения, причем электрический замедлитель выполнен с возможностью управления альтернатором 12 в качестве двигателя, использующего электрическую энергию, вырабатываемую первым электрическим тяговым двигателем 6 и вторым электрическим тяговым двигателем 7, причем альтернатор 12 выполнен с возможностью приведения в действие по меньшей мере одного паразитного потребителя 14 электроэнергии одноосного самосвала 1 во время торможения.
[0071] Альтернативно или дополнительно, электрический замедлитель может быть выполнен с возможностью использования электроэнергии, вырабатываемой первым электрическим тяговым двигателем 6 и вторым электрическим тяговым двигателем 7 во время торможения для подачи электроэнергии к паразитным потребителям 28 мощности через вспомогательный инвертер 27.
[0072] Альтернативно или дополнительно, электрический замедлитель может быть выполнен с возможностью преобразования электрической энергии, вырабатываемой первым электрическим тяговым двигателем 6 и вторым электрическим тяговым двигателем 7 в тепло через тормозной прерыватель 29 и решетчатую коробку 22.
[0073] В варианте осуществления самовыравнивающегося одноосного самосвала 1 колесные подшипники первого колеса 4 и второго колеса 5 жестко установлены на раме 2.
[0074] В варианте осуществления колесные подшипники могут представлять собой подшипники вращения выходных валов первого электрического тягового двигателя 6 и второго электрического тягового двигателя 7 и/или подшипники вращения выходных валов первой зубчатой передачи 8 и второй зубчатой передачи 9, приводимой в действие первым электрическим тяговым двигателем 6 и вторым электрическим тяговым двигателем 7.
[0075] В варианте осуществления самовыравнивающегося одноосного самосвала 1 как первый электрический тяговый двигатель 6, так и второй электрический тяговый двигатель 7 жестко установлены на раме 2. Установка может быть выполнена напрямую или через соответствующую зубчатую передачу.
[0076] В варианте осуществления самовыравнивающегося одноосного самосвала 1 первая зубчатая передача 8 и вторая зубчатая передача 9 жестко установлены на раме 2. Первый электрический тяговый двигатель 6 может быть установлен на первую зубчатую передачу 8 и второй электрический тяговый двигатель 7 может быть установлен на вторую зубчатую передачу 9, при этом как первая зубчатая передача 8, так и вторая зубчатая передача 9 жестко установлены на раме 2.
[0077] В варианте осуществления первое колесо 4 жестко установлено на выходном валу первого электрического тягового двигателя 6 или на выходном валу первой зубчатой передачи 8, жестко установленной по меньшей мере либо на раме 2, либо на первом электрическом тяговом двигателе 6; и причем второе колесо 5 жестко установлено на выходном валу второго электрического тягового двигателя или на выходном валу второй зубчатой передачи 9, жестко установленной по меньшей мере либо на раме 2, либо на втором электрическом тяговом двигателе 7.
[0078] В варианте осуществления выходной вал по меньшей мере одной из зубчатых передач 8, 9 может иметь наружный кожух 80, 90 зубчатой передачи. В варианте осуществления шина 40, 50 по меньшей мере либо первого, либо второго колеса может быть установлена на наружный кожух 80, 90 зубчатой передачи.
[0079] В варианте осуществления самовыравнивающийся одноосный самосвал 1 может дополнительно содержать первую зубчатую передачу 8, соединенную с первым электрическим тяговым двигателем 6, и вторую зубчатую передачу 9, соединенную со вторым электрическим тяговым двигателем 7. Кроме того, самовыравнивающийся одноосный самосвал 1 может содержать первую шину 40 первого колеса 4 и вторую шину 50 второго колеса 5, причем первое колесо 4 установлено на кожухе 80 первой зубчатой передачи, образующем выходной вал первой зубчатой передачи, и второе колесо 5 установлено на кожухе 90 второй зубчатой передачи 8, образующем выходной вал второй зубчатой передачи 8.
[0080] В альтернативном варианте осуществления колесные подшипники первого и второго колеса могут быть установлены на раму 2 через подвешивание.
[0081] В варианте осуществления самовыравнивающийся одноосный самосвал 1 может дополнительно содержать дистанционный контроллер 23 для управления одноосным самосвалом 1, причем дистанционный контроллер 23, обеспечивающий полное управление загрузкой и разгрузкой и ограниченное управление ходом.
[0082] В варианте осуществления самовыравнивающийся одноосный самосвал 1 может дополнительно содержать буксировочное приемное гнездо 55 для буксировки одноосного самосвала. Буксировочное приемное гнездо 55 может быть выполнено с возможностью введения буксировочного штыря и может иметь вертикальный ограничитель 56, несущий нагрузку самовыравнивающегося одноосного самосвала 1, в случае отключения электропитания самовыравнивающегося одноосного самосвала 1.
[0083] На фиг.10 и 11 показаны альтернативные механические конфигурации опорных ножек, используемых для стабилизации самосвала, причем опорные ножки снабжены самоустанавливающимися колесами 92.
[0084] До настоящего момента настоящая заявка была описана относительно самосвалов, содержащих саморазгружающийся кузов, прикрепленный с возможностью поворота к раме. Однако концепции настоящей заявки не ограничены использованием для самосвалов, содержащих саморазгружающийся кузов, прикрепленный с возможностью поворота к раме, и могут быть использованы для любого применения самосвала.
[0085] Например, во втором варианте осуществления предлагается самовыравнивающийся одноосный грузовик 1, содержащий раму 2, кузов 30 для удерживания груза, установленный на раме 2, и систему обеспечения движения и самовыравнивания, содержащую одиночную ось 3, поддерживающую раму 2 по меньшей мере во время движения самовыравнивающегося одноосного самосвала 1, причем одиночную ось 3, содержащую по меньшей мере первое и второе колесо 4, 5 и по меньшей мере первый электрический тяговый двигатель 6 для приведения в движение первого колеса 4 и второй электрический тяговый двигатель 7 для приведения в движение второго колеса 5. Самовыравнивающийся одноосный грузовик 1 может дополнительно содержать опорные ножки 34, расположенные на раме 2 и по меньшей мере исполнительный механизм 36 для опускания опорных ножек 34 по меньшей мере в первое опорное положение, в котором они по меньшей мере частично поддерживают раму 2, и для поднимания опорных ножек 34 по меньшей мере в одно приводное положение, при котором рама 2 опирается только на одиночную ось 3.
[0086] Во втором варианте осуществления кузов для удерживания груза может быть жестко установлен на раме 2. В остальном второй вариант осуществления может иметь такие же особенности, как и описанные выше и ниже относительно вариантов осуществления самосвала.
[0087] На фиг.12-15 показаны варианты осуществления способов управления самовыравнивающимся одноосным самосвалом. Например, команды для выполнения способов, показанных на фиг.12-15, можно выполнять посредством контроллера (например, такого, как контроллер 20, контроллер 100, и контроллер 23, показанные на фиг.1) на основе команд, хранящихся в памяти контроллера и в соответствии с сигналами, получаемыми от датчиков двигательной системы, таких как датчик 21, описанный выше со ссылкой на фиг.1. Контроллер может использовать исполнительные механизмы самовыравнивающегося одноосного самосвала, такие как исполнительный механизм для опускания опорных ножек (например, такие, как исполнительный механизм 36 и опорные ножки 35 на фиг.3), чтобы регулировать работу в соответствии с описанными ниже способами.
[0088] В варианте осуществления способы относятся к управлению самовыравнивающимся одноосным самосвалом, содержащим раму, саморазгружающийся кузов, установленный с возможностью поворота на раме 2, и систему приведения в движение и самовыравнивания, содержащую одиночную ось, поддерживающую раму по меньшей мере во время движения самовыравнивающегося одноосного самосвала, причем одиночную ось, содержащую по меньшей мере первое и второе колесо, и по меньшей мере первый электрический тяговый двигатель для приведения в движение первого колеса, и второй электрический тяговый двигатель для приведения в движение второго колеса.
[0089] В варианте осуществления способы могут относиться к управлению самовыравнивающимся одноосным самосвалом, как описано выше или ниже.
[0090] На фиг.12 показан первый вариант осуществления способа. Способ может содержать следующие блоки S1-S3:
[0091] Блок S1 может содержать приведение в движение одноосного самосвала посредством управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем для создания приводного крутящего момента.
[0092] Блок S2 может содержать самовыравнивание одноосного самосвала посредством управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем для создания самовыравнивающего крутящего момента, который объединяется с приводным крутящим моментом. Блок S2 можно выполнять одновременно с блоком S1 приведения в движение одноосного самосвала. Блок S2 может в частности содержать считывание выходного сигнала датчика и управление первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем для создания самовыравнивающего крутящего момента на основе выходного сигнала датчика. Выходной сигнал датчика может быть обработан для определения наклона самовыравнивающегося одноосного самосвала.
[0093] Блок S3 может содержать рулевое управление одноосным самосвалом посредством управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем для создания разности скоростей вращения первого колеса и второго колеса. Блок S3 можно выполнять одновременно с блоком S1 приведения в движение одноосного самосвала в первом направлении перемещения.
[0094] В варианте осуществления блок S3 может содержать управление первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем для вращения в противоположных направлениях вращения.
[0095] В дополнительном варианте осуществления, показанном на фиг.13, способ может содержать следующие блоки S4-S7:
[0096] Блок S4 может содержать приведение в движение одноосного самосвала, причем одноосного самосвала, поддерживаемого только одной осью. Блок S4 может содержать блоки S1-S3 в качестве подблоков.
[0097] Блок S5 может содержать остановку одноосного самосвала. В частности, блок S5 может содержать остановку одноосного самосвала по меньшей мере либо посредством управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем, либо управления тормозами. В частности, первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем можно управлять для создания тормозящего момента, и тормозами можно управлять посредством приложения силы торможения для остановки одноосного самосвала.
[0098] Блок S6 может содержать опускание опорных ножек по меньшей мере в одно опорное положение, при котором они по меньшей мере частично поддерживают раму.
[0099] Блок S7 может содержать по меньшей мере либо загрузку одноосного самосвала посредством заполнения саморазгружающегося кузова, либо разгрузку одноосного самосвала посредством поднимания саморазгружающегося кузова.
[0100] В дополнительном варианте осуществления, показанном на фиг.14, способ может содержать следующие блоки S8-S11:
[0101] Блок S8 может содержать приведение в движение одноосного самосвала в первом направлении движения посредством управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем для вращения в первом угловом направлении. В частности, блок S8 может содержать приведение в движение одноосного самосвала в первом направлении движения из положения загрузки в положение разгрузки или из положения разгрузки в положение загрузки. Положение загрузки и положение разгрузки можно определять заданием.
[0102] В вариантах осуществления настоящей заявки блок S8 может содержать блоки S1-S3 в качестве подблоков.
[0103] Блок S9 может содержать остановку одноосного самосвала. В вариантах осуществления настоящей заявки блок S9 может содержать блок S6 в качестве подблока. В частности, вариант осуществления может содержать опускание опорных ножек по меньшей мере в одно опорное положение, при котором они по меньшей мере частично поддерживают раму до остановки, во время остановки и после остановки транспортного средства.
[0104] Блок S10 может содержать по меньшей мере либо загрузку одноосного самосвала посредством заполнения саморазгружающегося кузова, либо разгрузку одноосного самосвала посредством поднимания саморазгружающегося кузова.
[0105] Блок S11 может содержать приведение в движение одноосного самосвала во втором направлении движения без поворачивания. В частности, блок S11 может содержать приведение в движение одноосного самосвала во втором направлении движения, противоположном первому направлению движения посредством управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем для вращения во втором угловом направлении, противоположном первому угловому направлению.
[0106] В варианте осуществления блок S11 может содержать приведение в движение одноосного самосвала во втором направлении движения из положения разгрузки в положение загрузки или из положения загрузки в положение разгрузки.
[0107] В вариантах осуществления настоящей заявки блок S11 может содержать блоки S1-S3 в качестве подблоков с противоположным направлением движения. В частности, вариант осуществления может содержать поднятие опорных ножек по меньшей мере в одно положение для перемещения до, во время или после приведения в движение одноосного самосвала во втором направлении перемещения.
[0108] Ниже раскрыты способы торможения, остановки, повторного ускорения и запуска одноосного транспортного средства. Эти способы, в частности, могут быть использованы для самовыравнивающегося одноосного самосвала, содержащего раму, саморазгружающийся кузов и систему обеспечения движения и самовыравнивания, содержащую одиночную ось, поддерживающую раму по меньшей мере во время движения самовыравнивающегося одноосного самосвала, причем одиночную ось, содержащую по меньшей мере первое и второе колесо, и по меньшей мере первый электрический тяговый двигатель для приведения в движение первого колеса и второй электрический тяговый двигатель для приведения в движение второго колеса. В варианте осуществления саморазгружающийся кузов может быть жестко установлен или установлен с возможностью поворота на раме 2.
[0109] В варианте осуществления способы могут относиться к функционированию самовыравнивающегося одноосного самосвала, как описано выше или ниже.
[0110] Способы могут быть использованы независимо от дополнительных способов, раскрываемых в данной заявке, или как часть этих способов.
[0111] В варианте осуществления настоящей заявки торможение или остановка транспортного средства и режим движения может содержать управление первым и вторым тяговым двигателем, чтобы заставить транспортное средство переходить из состояния движения, при котором оно наклоняется в первом направлении из направлений вперед или назад, и, в частности, к направлению движения, в состояние торможения, при котором оно наклоняется во втором направлении из направления вперед и назад, и, в частности, назад от направления движения. Это, в частности, может представлять собой случай торможения или остановки транспортного средства из режима движения, при котором транспортное средство движется по плоской и/или твердой поверхности земли.
[0112] В варианте осуществления это может содержать управление первым и вторым тяговыми двигателями для ускорения и/или чрезмерного ускорения транспортного средства в прямом направлении для того, чтобы заставлять транспортное средство отклоняться назад.
[0113] В варианте осуществления, только когда транспортное средство находится в состоянии торможения и, в частности, отклоняется назад и от первоначального направления движения, скорость транспортного средства уменьшают посредством управления тормозами для приложения силы торможения и/или посредством управления тяговыми двигателями для уменьшения скорости и/или создания тормозящего крутящего момента на колесах.
[0114] В дополнительном варианте осуществления настоящего изобретения повторное ускорение транспортного средства из режима торможения может содержать управление первым и вторым тяговым двигателем, чтобы заставить транспортное средство перейти из состояния торможения, при котором оно наклоняется во втором направлении из направлений вперед и назад, и, в частности, от направления движения, в состояние движения, при котором оно наклоняется в первом направлении из направлений вперед и назад, и, в частности, к направлению движения. Это, в частности, может иметь место при повторном ускорении транспортного средства из состояния торможения, при котором транспортное средство движется по плоской и/или твердой поверхности земли.
[0115] В варианте осуществления это может содержать управление первым и вторым тяговыми двигателями и/или торможение для дальнейшего снижения скорости и/или чрезмерное торможение транспортного средства для того, чтобы заставлять транспортное средство наклоняться вперед.
В варианте осуществления, только когда транспортное средство находится в состоянии приведения в движение и, в частности, наклоняется к направлению движения, скорость транспортного средства увеличивают посредством управления тяговыми двигателями для создания тягового крутящего момента на колесах.
[0116] В дополнительном варианте осуществления настоящего изобретения трогание с места транспортного средства из неподвижного положения может содержать управление первым и вторым тяговыми двигателями, чтобы заставлять транспортное средство переходить в состояние движения, при котором оно наклоняется в первом направлении из направлений вперед и назад, и, в частности, к направлению движения. Это, в частности, может представлять собой случай для трогания с места транспортного средства на плоской и/или твердой поверхности земли.
[0117] В варианте осуществления это может содержать управление первым и вторым тяговыми двигателями для приведения в движение транспортного средства в направлении, противоположном направлению движения, чтобы заставлять транспортное средство наклоняться вперед.
В варианте осуществления, только когда транспортное средство находиться в состоянии движения и, в частности, наклоняется вперед к направлению движения, тяговыми двигателями управляют для приведения транспортного средства в движение в направлении движения.
[0118] На фиг.15 показан дополнительный вариант осуществления способа. Способ может быть выполнен посредством системы управления одноосного самосвала. Способ может содержать блоки S12-S13.
[0119] Блок S12 может содержать получение задания от центрального контроллера заданий. Центральный контроллер заданий может представлять собой контроллер, находящийся на территории карьера, обеспечивающий выдачу заданий множеству автономно управляемых саморазгружающихся самосвалов.
[0120] Блок S13 может содержать автономное управление одноосным самосвалом во время выполнения задания.
[0121] В вариантах осуществления настоящей заявки блок S13 может содержать любой из блоков S1-S11, в качестве подблоков.
[0122] В частности, в варианте осуществления блок S13 может содержать блоки S1-S3 в качестве подблоков, причем способ дополнительно содержит определение местоположения транспортного средства, и, причем в блоке S3 можно управлять направлением движения одноосного самосвала при продвижении вдоль пути, определенном заданием, посредством создания разности скоростей вращения первого колеса и второго колеса.
[0123] Кроме того, в варианте осуществления блок S13 может содержать блоки S8-S11 в качестве подблоков, причем первое направление и второе направление и местоположение загрузки и местоположение разгрузки определяется заданием, получаемым от центрального контроллера заданий.
[0124] В дополнительных вариантах осуществления способ может содержать ручное управление одноосным самосвалом с использованием дистанционного контроллера. Такое ручное управление может быть, например, использовано для управления одноосным самосвалом для перемещения на место парковки.
[0125] В варианте осуществления одноосный самовыравнивающийся самосвал может быть использован в карьерах для транспортировочных целей. В варианте осуществления одноосный самовыравнивающийся самосвал может иметь полезную нагрузку, составляющую более 10, 50, 100 или 200 метрических тонн. В варианте осуществления одноосный самосвал может иметь полную массу транспортного средства, составляющую более 120, 100, 200 или 400 метрических тонн.
[0126] В варианте осуществления одноосный самовыравнивающийся самосвал может быть использован при землеройных работах.
[0127] В варианте осуществления одноосный самовыравнивающийся самосвал может иметь полезную нагрузку, составляющую более 0,5 метрических тонн. В варианте осуществления одноосный самовыравнивающийся самосвал может иметь полезную нагрузку, составляющую менее 50 метрических тонн.
[0128] В варианте осуществления одноосный самосвал может иметь полную массу транспортного средства, составляющую более 0,5 метрических тонн.
[0129] Ниже описаны дополнительные детали и варианты осуществления одноосевых самовыравнивающихся самосвалов и способы управления одноосевым самовыравнивающимся самосвалом.
[0130] В варианте осуществления одноосный самосвал может иметь одиночную ось 3, и загружаемая масса может быть подвешена над осью 3. Концепция может быть основана на конструкции перевернутого маятника с элементами управлениями, пригодными для сохранения устойчивости.
[0131] Самосвал может иметь множество опорных ножек 34, которые приводятся в действие гидравлически, и которые полностью развертывают, когда самосвал саморазгружается, загружается, остается на парковке или в других случаях, требующих устойчивости. В варианте осуществления самосвал может иметь 4 опорные ножки 34. В альтернативных вариантах осуществления самосвал может иметь 2 или 3 опорные ножки, смотри фиг.11.
[0132] Опорные ножки могут работать с контролируемой высотой от уклона во время движения для сведения к минимуму высоты падения в случае незапланированного события.
[0133] В варианте осуществления самосвал может снабжаться энергией от дизельного двигателя 11, который обеспечивает электроэнергией систему электрического привода переменного тока. В дополнение к функции активного выпрямителя самосвал может иметь решетчатую коробку 22 для динамического торможения. В режиме активного выпрямителя тяговые двигатели 5, 6 могут действовать в качестве генераторов для преобразования энергии торможения в электрическую энергию. Эта электрическая энергия может быть использована для приведения в действие вала 19 альтернатора/двигателя для подачи электроэнергии паразитным потребителям 14 мощности самосвалов. Для остановки самосвал может использовать систему сухих дисковых тормозов для уменьшения веса и снижения затрат.
[0134] Другие конфигурации одноосного самосвала могут использовать другие конфигурации источников энергии, такие как токосъемное устройство, аккумуляторное электрическое транспортное средство, гибридное электрическое транспортное средство.
[0135] В частности, в одной конфигурации одноосный самосвал может представлять собой аккумуляторное электрическое транспортное средство. В такой конфигурации одноосный самовыравнивающийся самосвал снабжен аккумулятором, который обеспечивает электроэнергией во время всей работы одноосного самосвала. В частности, в такой конфигурации одноосный самовыравнивающийся самосвал может быть выполнен без двигателя внутреннего сгорания. Когда аккумулятор разряжен, он может быть заряжен в то время, когда одноосный самовыравнивающийся самосвал не работает, или может быть заменен на заряженный аккумулятор, если он не заряжен, чтобы обеспечить непрерывную работу одноосного самосвала. Аккумулятор может быть объединен с суперконденсатором для обеспечения повышенной мощности в течение короткого периода времени, такого как период времени для операций самовыравнивания.
[0136] Одноосный самовыравнивающийся самосвал может представлять собой автономный самосвал, который не имеет кабины для оператора.
[0137] Одноосный самовыравнивающийся самосвал может быть снабжен суперконденсаторами 16, которые накапливают энергию во время замедления и/или во время движения, обеспечиваемого двигателем. Суперконденсаторы 16 могут удовлетворять потенциальные внезапные потребности в мощности для балансировки подвешенных масс или другие потребности, которые двигатель 11 и система привода могут быть не в состоянии удовлетворить в необходимое время.
[0138] В возможных вариантах осуществления самосвал может иметь одно или более следующих свойств:
- 50% - 50% распределение веса в незагруженном и загруженном состоянии на каждое колесо 4, 5, что увеличивает срок службы шины;
- двунаправленная загрузка позволяет избежать разворота при загрузке или разгрузке, что сокращает время цикла;
- нулевой радиус разворота для повышения маневренности;
- высокое соотношение полезной нагрузки к массе пустого самосвала обеспечивает большую эффективность топлива и снижение затрат на тонну;
- упрощенная конструкция сокращает время обслуживания и простоя;
- отсутствие подвески и рулевого управления сокращает количество механических и гидравлических компонентов;
- в альтернативной конфигурации одноосный самовыравнивающийся самосвал может быть снабжен подвеской;
- полностью автономный самосвал без кабины обеспечивает сокращение количества компонентов и снижение затрат на тонну;
- проводной/беспроводной контроллер 23 для проведения в движение и маневрирования в зоне технического обслуживания;
- буксировочное гнездо 55 для перемещения самосвала при потере мощности или при застревании.
[0139] Ниже описаны детали и варианты осуществления самосвала:
Конфигурация рамы
[0140] Как показано на фиг.5, на раме 2 самосвала может быть размещен саморазгружающийся кузов 30, исполнительные механизмы 33 в виде поднимающих цилиндров, двигатель 11, топливные баки 42, альтернатор 12, гидравлический насос 44, масляный бак для гидросистемы, радиатор 45, опорные ножки 34, тяговые двигатели 6, 7, суперконденсаторы 16 и шкаф 46 управления. Шкаф 46 управления может содержать автономное программное обеспечение.
[0141] Зубчатые приводы, обеспечиваемые комбинацией электрических тяговых двигателей 6,7 и зубчатых передач 8, 9 могут быть установлены непосредственно на раме 2, что устраняет необходимость в традиционной осевой буксе. В альтернативном варианте осуществления электрические тяговые двигатели 6, 7 могут быть установлены на раме 2 посредством подвески.
[0142] Рама для самосвала может быть изготовлена из стали. Она может состоять из сварных и литых структур. Рама обеспечивает пространство для установки и надлежащего обслуживания двигателя, гидравлики и выполнения всех необходимых сервисных работ.
[0143] Рама 2 может быть выполнена с возможностью расположения центра масс выше уровня земли, то есть выше уровня одиночной оси 3 как в незагруженном, так и в загруженном состоянии саморазгружающегося кузова. Таким образом, наклон одноосного самосвала может быть использован для поглощения ускоряющего крутящего момента.
[0144] Рама 2 и саморазгружающийся кузов 30 могут быть выполнены с возможностью обеспечения балансировки самосвала относительно одиночной оси. Это может применяться по меньшей мере либо к разгруженному состоянию, либо к загруженному состоянию, либо к обоим состояниям самосвала.
[0145] В варианте осуществления двигатель 11 может быть расположен между шинами 4 в продольном направлении и/или с его центром масс, расположенным над осью 3 в вертикальном направлении. В других конфигурациях двигатель может быть расположен сбоку, спереди или сзади одиночной оси 3.
[0146] Рама 2 может содержать левую и правую боковые пластинчатые структуры 81, 82. Каждая боковая пластинчатая структура 81, 82 на своей наружной стороне может быть снабжена соединительной частью для тяговых двигателей 6, 7, точкой опоры для саморазгружающегося кузова 30 и точкой опоры для исполнительного механизма 33 в виде поднимающего цилиндра саморазгружающегося кузова. Кроме того, каждая из боковых пластинчатых структур 81, 82 может быть снабжена точками опоры для передней и задней опорных ножек 34 и соответствующих исполнительных механизмов 36 в виде цилиндров.
[0147] Левая и правая боковые пластинчатые структуры 81, 82 могут быть соединены нижней и верхней поперечными балками 83, 84. Двигатель 11 может быть расположен между боковыми пластинчатыми структурами и нижней и верхней поперечными балками.
[0148] В варианте осуществления каждая боковая пластинчатая структура 81, 82 образована двумя или тремя параллельными пластинами, соединенными ограничительными элементами, причем свободные концы пластин имеют точки опоры.
Саморазгружающийся кузов
[0149] На фиг.7 показан вариант осуществления саморазгружающегося кузова 30. Саморазгружающийся кузов 30 может опираться на раму 2 вокруг горизонтальной оси 31 вращения и подниматься посредством гидравлических исполнительных механизмов 33 в виде поднимающих цилиндров. Исполнительные механизмы 33 в виде поднимающих цилиндров могут быть прикреплены к саморазгружающемуся кузову в точке 32 и могут быть использованы для поднятия саморазгружающегося кузова 30. Когда саморазгружающийся кузов 30 находится в опущенном положении, гидравлические исполнительные механизмы 33 в виде цилиндров могут не нести нагрузки от саморазгружающегося кузова 30 или от полезной нагрузки. Для боковой устойчивости могут быть предусмотрены направляющие. Для обеспечения несущей способности в опущенном положении могут быть предусмотрены подкладки.
[0150] Саморазгружающийся кузов 30 и нагруженная масса могут находиться над рамой и центральной линией оси. Результирующий центр тяжести сборки может находиться над рамой 2, уравновешиваемой посредством электрических тяговых двигателей 6, 7 и структурой элементов управления.
[0151] Процесс разгрузки может начаться только после выполнения развертывания стабилизирующих ножек 34 и после приведения самосвала в устойчивое состояние.
[0152] Саморазгружающийся кузов может быть снабжен с обеих боковых сторон закрывающими секциями 72, расположенных над колесами 4 и 5. В альтернативной конфигурации колеса 4 и 5 могут быть частично или полностью расположены под нижней стороной саморазгружающегося кузова. В такой конфигурации, так как шины 40 и 50 размещены под саморазгружающимся кузовом, общая ширина конструкции может быть уменьшена.
[0153] Саморазгружающийся кузов 30 может иметь первую продольную боковую сторону 71 и вторую продольную боковую сторону 73. В варианте осуществления первая продольная боковая сторона 71 и вторая продольная боковая сторона 73 могут иметь различный наклон α и α’. Первая продольная боковая сторона 71, имеющая меньший наклон α, может быть расположена с продольной стороны самосвала, на которую разгружают кузов.
[0154] Поскольку самосвал не снабжен кабиной, то нет необходимости в соблюдении требований к пространству ни в одном продольном направлении. Кроме того, не требуется защитная закрывающая структура.
[0155] Саморазгружающийся кузов 30 может быть заполнен конической кучей 74 с углом β естественного откоса, находящимся в диапазоне от 20 до 40 градусов.
[0156] Саморазгружающийся кузов может иметь вместимость, составляющую более 5 кубических метров и может удерживать по меньшей мере 10 метрических тонн материала.
[0157] В альтернативном варианте осуществления саморазгружающийся кузов может иметь вместимость, составляющую более 0,5 кубических метров и может удерживать по меньшей мере 0,5 метрических тонн материала.
Опорные ножки
[0158] Опорные ножки 34 могут быть прикреплены с возможностью поворота к раме 2. Опускание и поднимание могут быть обеспечены посредством исполнительных механизмов 36 в виде гидравлических цилиндров 36.
[0159] На фиг.1-9 показан вариант осуществления с четырьмя ножками. Каждая ножка 34 снабжена платформой 35 для ножки. Платформа 35 для ножки может быть прикреплена к нижнему концу опорной ножки 34.
[0160] В варианте осуществления, показанном на фиг.10, держатель 91 для передних ножек и держатель 93 для задних ножек выполнены в виде опорных ножек, каждую из которых опускают и поднимают посредством по меньшей мере одного исполнительного механизма 36 в виде гидравлического цилиндра.
[0161] Как держатель 91 для передних ножек, так и держатель 93 для задних ножек снабжены колесом 92 для поддерживания рамы на поверхности земли. Колеса 92 имеют ось вращения для обеспечения поддерживания рамы на поверхности земли во время буксировки. Ось вращения может быть выполнена без системы рулевого управления.
[0162] В варианте осуществления, показанном на фиг.11, в качестве опорных ножек предусмотрены четыре держателя 34 колес, причем каждый держатель колес снабжен колесом 92. Колеса 92 имеют ось вращения для обеспечения поддерживания рамы на поверхности земли во время операции по буксировке. Оси вращения могут быть выполнены без системы рулевого управления.
[0163] В альтернативной конфигурации могут быть предусмотрены два колеса и/или два держателя колес с передней или задней стороны и одно колесо и/или один держатель колес может быть предусмотрен с другой стороны.
Шины
[0164] Каждая шина может выдерживать нагрузку, составляющую не менее 10, 20 или 50 метрических тонн. В одном варианте каждая шина может выдерживать нагрузку, составляющую более 100 метрических тонн. В альтернативном варианте каждая шина может выдерживать нагрузку, составляющую не менее 0,5 метрических тонн. В одном варианте каждая шина может выдерживать нагрузку, составляющую более 1 метрической тонны. Шины обеспечивают эффект пружины и некоторый минимальный демпфирующий эффект, тем самым выступая в качестве подвески такого самосвала. В одном варианте осуществления на самосвале нет отдельной подвески. В альтернативном варианте может быть предусмотрена подвеска.
Двигатель/Мощность
[0165] В самосвале может быть использован дизельный двигатель. Двигатель может иметь более 10 или более 16 поршней. Он может иметь общий рабочий объем, составляющий более 20 литров. Двигатель может быть оборудован системой доочистки выхлопных газов (SCR system) и может соответствовать ограничениям на выбросы выхлопных газов в соответствии со стандартами Агентства по защите окружающей среды США и Калифорнийской комиссией по контролю чистоты воздуха (EPA CARB Tier 4). Двигатель может допускать многократный впрыск топлива под давлением, составляющим более 1000 бар. Этот двигатель может быть основным источником энергии. Двигатель может приводить в действие альтернатор, вырабатывающий электроэнергию для приведения в действие тяговых двигателей.
[0166] В альтернативной конфигурации одноосный самовыравнивающийся самосвал может представлять собой аккумуляторный электромобиль. В такой конфигурации одноосный самовыравнивающийся самосвал снабжен аккумулятором в качестве основного источника энергии.
[0167] Помимо двигателя внутреннего сгорания или аккумулятора, самосвал может иметь модуль суперконденсатора.
[0168] Суперконденсаторы можно заряжать от двигателя, аккумулятора и/или от энергии торможения. Суперконденсаторы могут обеспечивать электропитание самосвала в течение короткого промежутка времени для обеспечения устойчивости. Суперконденсаторы могут обеспечивать более короткое время реагирования по сравнению с дизельным двигателем и генератором, или аккумулятором, которое может быть необходимо для стабилизации грузовика.
[0169] В одном варианте осуществления мощность от суперконденсаторов может быть использована для обеспечения крутящего момента, необходимого для самовыравнивания одноосного самосвала. В частности, мощность от суперконденсаторов может быть использована в случаях, когда двигатель внутреннего сгорания или аккумулятор не могут обеспечить необходимую мощность для самовыравнивания. Это может происходить из-за того что максимальная мощность двигателя внутреннего сгорания или батареи недостаточна и/или потому что выходная мощность двигателя внутреннего сгорания или батареи не может быть увеличена достаточно быстро.
[0170] Может быть использован вентилятор двигателя с гидравлическим приводом или вентилятор двигателя с ременным приводом.
Гидравлическая система
[0171] В одном варианте осуществления гидравлический насос 44 может быть установлен на задней части альтернатора 12 посредством механического соединения без какого-либо редуктора. В конфигурации аккумуляторного электрического транспортного средства гидравлический насос может быть приведен в действие отдельным электродвигателем. Кроме того, гидравлическая система может быть частично или полностью заменена электрической системой.
[0172] В самосвале может быть предусмотрено несколько гидроаккумуляторов, которые удовлетворяют гидравлическим требованиям по приведению в действие тормозов и ножек. Другие гидравлические системы включают в себя охлаждение трансмиссионного масла, охлаждение шкафа управления, нагнетатели (если они гидравлические) и вентилятор двигателя (если он гидравлический). Для удовлетворения вышеуказанных требований может быть предусмотрен гидравлический коллектор, при необходимости отводящий поток.
[0173] Опорные ножки 34 могут приводиться в действие гидравлически, как показано на фиг.6. Гидравлическая система для опорных ножек 34 выполнена с обеспечением достаточной скорости приведения в действие, чтобы сохранять заданную высоту от земли. В альтернативной конфигурации опорные ножки могут приводиться в действие электрическим приводом.
[0174] В варианте осуществления опорные ножки могут быть выполнены с возможностью поднимания самосвала для обслуживания шин или приводов колес. Во время такого поддомкрачивания посредством опорных ножек 34 приводы опорных ножек, такие как исполнительные механизмы 36 опорных ножек или электрические исполнительные механизмы, могут быть заблокированы, чтобы гарантировать отсутствие нежелательного перемещения самосвала. На фиг.9 показан блокирующий кронштейн 37, используемый для этой цели.
[0175] Чтобы управлять самосвалом в режиме поддомкрачивания, на проводном или беспроводном интерфейсе дистанционного управления должен быть активирован выбор, который обеспечивает последовательность необходимых действий для поддомкрачивания самосвала.
Конфигурация паразитной нагрузки
[0176] В варианте осуществления в дополнение к требуемой тяговой мощности, двигатель 11 может обеспечивать мощность для паразитной нагрузки самосвала. Кинетическая энергия самосвала во время замедления также может быть использована для питания таких паразитных нагрузок 14, 28 с использованием функции активного выпрямителя. В таблице 2 ниже представлены расчетные значения мощности для паразитных нагрузок в условиях стандартной двигательной установки.
Система привода
[0177] На фиг.2 показана конфигурация системы привода верхнего уровня. Система управления и система привода переменного тока с тяговыми двигателями 6, 7, выполненные с возможностью переключения направления, могут быть использованы для обеспечения устойчивости самосвала. Тяговыми двигателями 6, 7 можно управлять при использовании силовых стеков 25 и 26.
[0178] Система привода может быть выполнена с возможностью функционирования в режиме активного выпрямителя.
[0179] Могут быть предусмотрены два тяговых двигателя 6, 7, по одному на каждое колесо 4, 5, которые приводят в движение колеса самосвала. Тяговый двигатель должен обеспечивать достаточный крутящий момент для обеспечения движения самосвала, поглощения тормозного усилия и поддержания устойчивости в стандартных условиях эксплуатации. Супераконденсаторы 16 могут обеспечивать питание привода в случае внезапных требований к балансировке компонентов подвесной рамы или других требований.
[0180] Альтернатор 16 может преобразовывать механическую энергию двигателя 11 в электрическую энергию и подавать ее на шину 24 постоянного тока. Он также действует как тяговый двигатель и приводит в действие двигатель 11 в режиме активного выпрямителя. Во время замедления тяговый двигатель 6, 7 действует как генератор для преобразования механической энергии в электрическую энергию. Эта энергия используется для работы двигателя 11 и альтернатора 12 с учетом требований к паразитным нагрузкам 14. В режиме активного выпрямителя подача топлива в двигатель может быть отключена для снижения потребления топлива. Если имеется какая-либо неиспользованная тормозная мощность, которая не может быть поглощена паразитными нагрузками 14 или 28, она будет рассеиваться в решетчатой коробке 22.
Инфраструктура
[0181] Поскольку грузовик имеет массу, подвешиваемую над осью, для самосвала может быть специально разработана процедура буксировки.
[0182] Как показано на фиг.10, самосвал может иметь дополнительное буксировочное опорное устройство 55 для буксировки, предназначенное для использования со стандартным буксировочным самосвалом 57 с буксировочным штифтом 58, используемым для буксировки и восстановления.
[0183] Этот компонент используют для подъема самосвала с любой стороны. Может быть предусмотрен удерживающий механизм 56 для удерживания буксировочного штифта 55 из-за ограниченного веса на штифте в горизонтальном положении.
[0184] Перед началом процедуры буксировки самосвал может находиться в состоянии, при котором ножки опущены и саморазгружающий кузов пуст. При удерживаемом штифте 58 можно привести в действие гидравлику, чтобы поднять опорные ножки 34 в положение буксировки.
[0185] Для полного отключения самосвала всю накопленную энергию можно заблокировать. В неподвижном положении опорные ножки будут развернуты. Это может происходить как с шинами, расположенными на земле, так и в состоянии поддомкрачивания с оторванными от земли шинами. Для блокировки гидроцилиндров опорных ножек предусмотрен кронштейн 37, который может садиться на шток 91 поршня и механически удерживать исполнительный механизм 36 в виде цилиндра в выдвинутом положении. Этот кронштейн 37 может быть изготовлен из неразрушающих материалов, которые не повреждают уплотнительную поверхность поршня при регулярной установке. На фиг.9 показан пример оборудования для блокировки.
[0186] Проводной или беспроводной интерфейсный блок дистанционного управления для дистанционного контроллера 23 может быть использован для обеспечения ручного управления самосвалом. Проводное соединение должно быть достаточно длинным, чтобы обеспечивать безопасную работу самосвала. Характеристики должны включать в себя: полное гидравлическое управление и ограниченное управление ходом.
Тормоза
[0187] Такой самосвал может иметь сухие дисковые тормоза с решетчатым блоком 22 для рассеивания энергии торможения. Тормозные диски могут быть установлены внутри самосвала и могут вращаться со скоростью вращения якоря. Самосвал также может быть оснащен функцией активного выпрямителя. Торможение генерирует энергию в тяговом двигателе/генераторе, которая используется для приведения в действие вала 19 альтернатора/двигателя для работы вспомогательного оборудования и паразитных нагрузок на самосвале, как упомянуто выше. В этих условиях можно сливать топливо двигателя для снижения скорости двигателя. Это снижает расход топлива и эксплуатационные расходы. Если энергия от торможения не требуется в активном выпрямителе, она может рассеиваться в решетчатой коробке 22.
[0188] Торможение в функции активного выпрямителя может быть использовано в качестве первого средства замедления самосвала. Тормозная система может удовлетворять требованиям соответствующих стандартов по безопасности и дублированию, связанных с автономной работой.
Подвеска
[0189] Такой самосвал может не иметь подвески, что уменьшает количество компонентов, тем самым снижая затраты на техническое обслуживание. Шины грузовика могут действовать в качестве подвесок благодаря своим пружинным свойствам и ограниченному демпфирующему действию. Оператор может не находиться на самосвале. Из-за отсутствия оператора требования к демпфированию исходят только из требований к устойчивости и структурным потребностям.
[0190] Во втором варианте осуществления используется стандартная подвеска.
Баки
[0191] топливный бак может быть сконструирован таким образом, чтобы самосвал мог работать в течение 24 часов без дозаправки.
Автоматическая смазка
[0192] Благодаря конструкции, которая по своей сути исключает многие соединения, которые традиционно нуждаются в смазке на самосвале, не требуется смазочная система при использовании герметичных втулок. Многие из шарниров вращаются на очень малую величину и очень редко, что делает возможным использование втулки такого типа. При необходимости автоматическая система смазки может иметь гидравлический привод.
Доступ/Выход/Поручни
[0193] В вариантах осуществления, в которых нет кабины, не будет лестницы для входа оператора в кабину. К стойкам 34 грузовика может быть прикреплена одна или несколько служебных лестниц или трапов. Лестницы могут спускаться с ножек 34 самосвала и иметь при необходимости поручни. Служебные лестницы или трапы должны обеспечивать доступ к основным компонентам грузовика. Необходимо предусмотреть проходы для достижения участков с малым интервалом обслуживания.
Электрооборудование низкого напряжения
[0194] Блок интерфейса оператора может быть размещен в месте, где он доступен, защищен и экранирован. Блок интерфейса оператора может иметь один или несколько из следующих компонентов: порт интерфейса для дистанционного управления, порт для диагностики, выключатель аккумулятора, блокировку хода, ограниченную гидравлическую функциональную возможность в режиме обслуживания, экран человеко-машинного интерфейса, автономную диагностическую функциональную возможность и другие необходимые функциональные возможности.
[0195] Прокладка кабелей связи и других критических сигналов разработана таким образом, чтобы обеспечивать достаточно места для уменьшения влияния электромагнитных помех от кабелей большой мощности. Можно использовать зарядный альтернатор постоянного тока на 24 V. Электропроводка может быть сконструирована с обеспечением стойкости к брызгам и совместима с очисткой струей под давлением.
Система взвешивания полезной нагрузки
[0196] Может быть предусмотрена отдельная система взвешивания полезной нагрузки. Самосвал может быть оборудован датчиками для проверки массы и местоположения полезной нагрузки. Эта информация может передаваться для функций управления.
[0197] В вариантах осуществления, которые не имеют подвески, и в вариантах осуществления, имеющих подвеску, может быть предусмотрена отдельная система взвешивания полезной нагрузки.
Кабина
[0198] В варианте осуществления в таком самосвале может не быть кабины. В частности, как описано выше, самосвал может быть автономным и не включать в себя кабину для оператора.



Группа изобретений относится к грузовым автомобилям, в частности к самосвалам. Самовыравнивающийся одноосный самосвал содержит раму, саморазгружающийся кузов, установленный с возможностью поворота на раме, и систему обеспечения движения и самовыравнивания. Система обеспечения движения и самовыравнивания содержит одиночную ось, поддерживающую раму во время движения самовыравнивающегося одноосного самосвала и содержащую первое и второе колеса, и первый электрический тяговый двигатель для приведения в действие первого колеса и второй электрический тяговый двигатель для приведения в действие второго колеса. Достигается повышение эффективности работы и производительности и снижение затрат на техническое обслуживание. 3 н. и 26 з.п. ф-лы, 15 ил.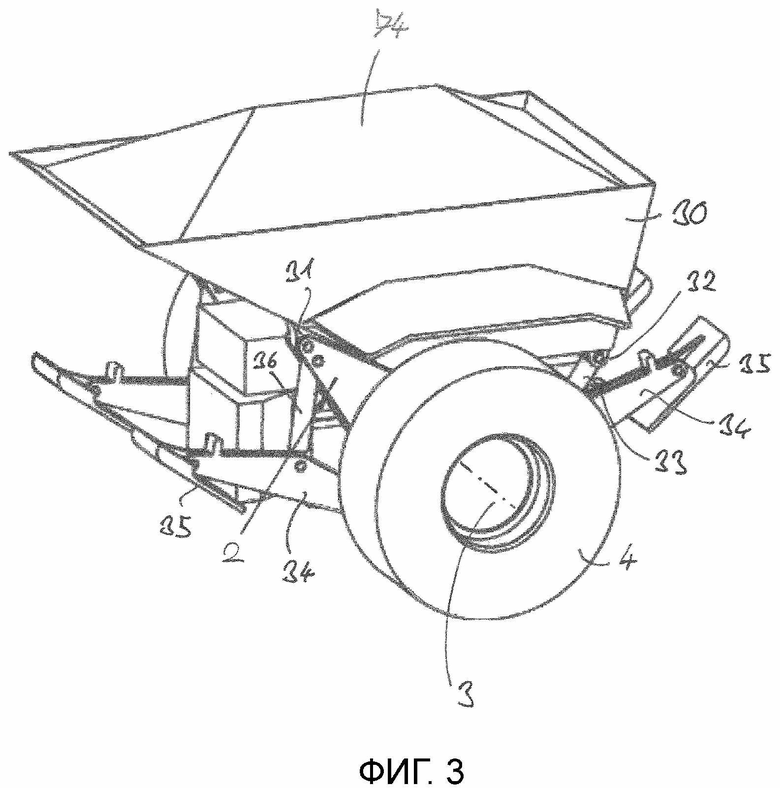
1. Самовыравнивающийся одноосный самосвал, содержащий:
раму;
саморазгружающийся кузов, установленный с возможностью поворота на раме;
систему обеспечения движения и самовыравнивания, содержащую:
- одиночную ось, поддерживающую раму по меньшей мере во время движения самовыравнивающегося одноосного самосвала и содержащую по меньшей мере первое и второе колеса; и
- по меньшей мере первый электрический тяговый двигатель для приведения в действие первого колеса и второй электрический тяговый двигатель для приведения в действие второго колеса.
2. Самовыравнивающийся одноосный самосвал по п.1, дополнительно содержащий: систему рулевого управления, выполненную с возможностью управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем и с возможностью рулевого управления самовыравнивающимся одноосным самосвалом за счет разности скоростей первого колеса и второго колеса.
3. Самовыравнивающийся одноосный самосвал по п.2, в котором система рулевого управления выполнена с возможностью управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем для вращения в противоположных направлениях вращения.
4. Самовыравнивающийся одноосный самосвал по п.1, дополнительно содержащий:
систему управления самовыравниванием, содержащую:
- датчик и
- контроллер, выполненный с возможностью выравнивания самовыравнивающегося одноосного самосвала в положение равновесия посредством управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем в зависимости от сигнала, получаемого от датчика.
5. Самовыравнивающийся одноосный самосвал по п.4, в котором система управления самовыравниванием выполнена с возможностью управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем таким образом, чтобы положение равновесия изменялось в зависимости от по меньшей мере одного из: ускорения самовыравнивающегося одноосного самосвала и уклона поверхности земли, по которой перемещается самовыравнивающийся одноосный самосвал.
6. Самовыравнивающийся одноосный самосвал по п.1, содержащий систему управления для управления одноосным самосвалом в автономном режиме, причем система управления выполнена с возможностью дистанционной связи с центральным контроллером заданий для получения задания и для автономного управления самовыравнивающимся одноосным самосвалом во время выполнения задания.
7. Самовыравнивающийся одноосный самосвал по п.6, в котором рама выполнена без кабины для водителя.
8. Самовыравнивающийся одноосный самосвал по п.1, дополнительно содержащий:
- опорные ножки, расположенные на раме, и
- по меньшей мере исполнительный механизм для опускания опорных ножек по меньшей мере в первое опорное положение, в котором они по меньшей мере частично поддерживают раму, и для поднимания опорных ножек по меньшей мере в одно приводное положение, в котором рама опирается только на одиночную ось.
9. Самовыравнивающийся одноосный самосвал по п.8, в котором исполнительный механизм выполнен с возможностью опускания опорных ножек во второе опорное положение, в котором по меньшей мере одно из первого и второго колес одиночной оси поднято от поверхности земли.
10. Самовыравнивающийся одноосный самосвал по п.8, в котором по меньшей мере один исполнительный механизм содержит блокирующий кронштейн для механического блокирования по меньшей мере одного опорного положения.
11. Самовыравнивающийся одноосный самосвал по п.8, содержащий систему управления для управления по меньшей мере одним исполнительным механизмом, причем система управления выполнена с возможностью изменения высоты расположения опорных ножек во время приведения в движение.
12. Самовыравнивающийся одноосный самосвал по п.11, в котором система управления для управления по меньшей мере одним исполнительным механизмом выполнена с возможностью изменения высоты расположения опорных ножек в зависимости от по меньшей мере одного из: ускорения самовыравнивающегося одноосного самосвала и уклона поверхности земли, по которой перемещается самовыравнивающийся одноосный самосвал.
13. Самовыравнивающийся одноосный самосвал по п.11, в котором система управления для управления по меньшей мере одним исполнительным механизмом выполнена с возможностью изменения высоты расположения опорных ножек для сохранения расстояния опорных ножек относительно поверхности земли в диапазоне допустимых расстояний и/или на допустимом расстоянии.
14. Самовыравнивающийся одноосный самосвал по п.8, в котором опорные ножки снабжены по меньшей мере одним из: самоустанавливающихся колес и платформ для ножек.
15. Самовыравнивающийся одноосный самосвал по п.1, дополнительно содержащий в качестве основного источника питания по меньшей мере одно из:
- двигателя внутреннего сгорания и альтернатора, приводимого в действие двигателем внутреннего сгорания для выработки электрической энергии для приведения в действие первого электрического тягового двигателя и второго электрического тягового двигателя, и
- аккумулятора для подачи электрической энергии для приведения в действие первого электрического тягового двигателя и второго электрического тягового двигателя.
16. Самовыравнивающийся одноосный самосвал по п.15, дополнительно содержащий:
- систему накопления электроэнергии для обеспечения дополнительной мощности для первого электрического тягового двигателя и второго электрического тягового двигателя для случаев балансировки массы.
17. Самовыравнивающийся одноосный самосвал по п.15, дополнительно содержащий:
- систему управления энергией, выполненную с возможностью использования, в режиме полной мощности, максимально допустимой тяговой мощности от по меньшей мере одного из: двигателя внутреннего сгорания и аккумулятора для приведения в движение самовыравнивающегося одноосного самосвала, и для обеспечения, в режиме полной мощности, дополнительной мощности для случаев неожиданной балансировки массы от по меньшей мере одного из: системы накопления электроэнергии и резерва мощности двигателя внутреннего сгорания и/или аккумулятора.
18. Самовыравнивающийся одноосный самосвал по п.1, дополнительно содержащий замедлитель, соединенный с первым электрическим тяговым двигателем и со вторым электрическим тяговым двигателем для торможения одноосного самосвала по меньшей мере в первом режиме торможения, при этом замедлитель выполнен с возможностью управления альтернатором в качестве двигателя, использующего электрическую энергию, вырабатываемую первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем, причем альтернатор выполнен с возможностью приведения в действие по меньшей мере одного паразитного потребителя электроэнергии одноосного самосвала во время торможения.
19. Самовыравнивающийся одноосный самосвал по п.1, в котором колесные подшипники первого и второго колеса жестко установлены на раме.
20. Самовыравнивающийся одноосный самосвал по п.19, в котором как первый электрический тяговый двигатель, так и второй электрический тяговый двигатель жестко установлены на раме, при этом первое колесо жестко установлено на выходном валу первого электрического тягового двигателя или на выходном валу первой зубчатой передачи, жестко установленной на по меньшей мере одном из: рамы и первого электрического тягового двигателя, а второе колесо жестко установлено на выходном валу второго электрического тягового двигателя или на выходном валу второй зубчатой передачи, жестко установленной на по меньшей мере одном из: рамы и второго электрического тягового двигателя.
21. Самовыравнивающийся одноосный самосвал по п.1, в котором колесные подшипники первого и второго колеса установлены на раме посредством подвески.
22. Самовыравнивающийся одноосный самосвал по п.1, дополнительно содержащий дистанционный контроллер для управления одноосным самосвалом, причем дистанционный контроллер обеспечивает полное управление загрузкой и разгрузкой и ограниченное управление ходом.
23. Самовыравнивающийся одноосный самосвал по п.1, дополнительно содержащий буксировочное приемное устройство для буксировки одноосного самосвала.
24. Самовыравнивающийся одноосный грузовик, содержащий:
раму;
кузов для удерживания груза, установленный на раме;
систему приведения в движение и самовыравнивания, содержащую:
- одиночную ось, поддерживающую раму по меньшей мере во время движения самовыравнивающегося одноосного грузовика и содержащую по меньшей мере первое и второе колеса; и
- по меньшей мере первый электрический тяговый двигатель для приведения в действие первого колеса и второй электрический тяговый двигатель для приведения в действие второго колеса;
опорные ножки, расположенные на раме; и
по меньшей мере исполнительный механизм для опускания опорных ножек в по меньшей мере первое опорное положение, в котором они по меньшей мере частично поддерживают раму, и для поднимания опорных ножек в по меньшей мере одно приводное положение, в котором рама опирается только на одиночную ось.
25. Способ управления самовыравнивающимся одноосным самосвалом, содержащим раму, саморазгружающийся кузов, установленный с возможностью поворота на раме, и систему обеспечения движения и самовыравнивания, содержащую одиночную ось, поддерживающую раму по меньшей мере во время движения самовыравнивающегося одноосного самосвала, причем одиночная ось содержит по меньшей мере первое и второе колеса, и по меньшей мере первый электрический тяговый двигатель для приведения в действие первого колеса и второй электрический тяговый двигатель для приведения в действие второго колеса, при этом способ включает:
- приведение в движение самовыравнивающегося одноосного самосвала посредством управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем для создания приводного крутящего момента;
- во время приведения в движение самовыравнивающегося одноосного самосвала самовыравнивание самовыравнивающегося одноосного самосвала посредством самовыравнивающего крутящего момента, который объединяется с приводным крутящим моментом; и
- во время приведения в движение самовыравнивающегося одноосного самосвала рулевое управление самовыравнивающимся одноосным самосвалом посредством управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем для создания разности скоростей вращения первого колеса и второго колеса.
26. Способ по п.25, дополнительно включающий:
- остановку самовыравнивающегося одноосного самосвала;
- опускание опорных ножек в по меньшей мере одно опорное положение, в котором они по меньшей мере частично поддерживают раму, и
- по меньшей мере одно из: загрузки самовыравнивающего одноосного самосвала посредством заполнения саморазгружающегося кузова и разгрузки самовыравнивающегося одноосного самосвала посредством поднимания саморазгружающегося кузова.
27. Способ по п.25, дополнительно включающий:
- приведение в движение самовыравнивающегося одноосного самосвала в первом направлении движения из положения загрузки или положения разгрузки в соответствии с заданием по разгрузке, в следующее одно из: положения загрузки и положения разгрузки посредством управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем для вращения в первом угловом направлении;
- остановку самовыравнивающегося одноосного самосвала;
- загрузку самовыравнивающегося одноосного самосвала посредством заполнения саморазгружающегося кузова или разгрузку самовыравнивающегося одноосного самосвала посредством поднимания саморазгружающегося кузова; и
- без поворота, приведение в движение самовыравнивающегося одноосного самосвала обратно в положение разгрузки или в положение загрузки во втором направлении перемещения, противоположном первому направлению перемещения, посредством управления первым электрическим тяговым двигателем и вторым электрическим тяговым двигателем для вращения во втором угловом направлении, противоположном первому угловому направлению.
28. Способ по п.25, выполняемый посредством системы управления самовыравнивающегося одноосного самосвала, причем способ дополнительно включает:
- получение задания от центрального контроллера заданий; и
- автоматическое управление самовыравнивающимся одноосным самосвалом во время выполнения задания.
29. Способ по п.28, дополнительно включающий:
- ручное управление самовыравнивающимся одноосным самосвалом с использованием дистанционного контроллера.
| Одноосный самосвальный прицеп | 1971 |
|
SU503494A3 |
| US 2009041564 A1, 12.02.2009 | |||
| US 2012130578 A1, 24.05.2012 | |||
| WO 2019075002 A1, 18.04.2019 | |||
| US 2018345952 A1, 06.12.2018 | |||
| Одноосный самосвальный прицеп | 1978 |
|
SU785103A2 |
