Изобретение относится к области систем автоматического регулирования, а именно к системам автоматического наведения и стабилизации пакета направляющих (ПН) с реактивными снарядами (PC), размещенного на боевой машине реактивной системы залпового огня (БМ РСЗО).
Известна система наведения и стабилизации пакета направляющих боевой машины реактивной системы залпового огня по патенту РФ №2387943, принятая за прототип.
Данная система наведения и стабилизации ПН БМ РСЗО содержит регулируемый насос с датчиком положения его люльки, гидробак, гидродвигатель, кинематически связанный с ПН, первый и второй суммирующие усилители, формирователь ошибки, задающее устройство, третий суммирующий усилитель, датчик давления, установленный в напорной гидролинии регулируемого насоса, первый и второй дросселирующие гидрораспределители с электромагнитным управлением, первый и второй гидроцилиндры, кинематически связанные с ПН, датчики абсолютного положения и абсолютной скорости, установленные на ПН, при этом выход задающего устройства соединен с первым неинвертирующим входом третьего суммирующего усилителя, второй инвертирующий вход которого соединен с выходом датчика положения люльки регулируемого насоса, третий инвертирующий вход третьего суммирующего усилителя соединен с выходом датчика давления, а выход третьего суммирующего усилителя соединен с управляющим входом регулируемого насоса, вход регулируемого насоса соединен с гидробаком, первый инвертирующий вход формирователя ошибки соединен с первым выходом датчика абсолютного положения (канал вертикальной стабилизации), второй инвертирующий вход формирователя ошибки соединен со вторым выходом датчика абсолютного положения (канал горизонтальной стабилизации), первый инвертирующий вход первого суммирующего усилителя соединен с первым выходом датчика абсолютной скорости (канал вертикальной стабилизации), первый инвертирующий вход второго суммирующего усилителя соединен со вторым выходом датчика абсолютной скорости (канал горизонтальной стабилизации), первый выход формирователя ошибки соединен со вторым неинвертирующим входом первого суммирующего усилителя, второй выход формирователя ошибки соединен со вторым неинвертирующим входом второго суммирующего усилителя, входы первого и второго дросселирующих гидрораспределителей гидролиниями соединены с выходом регулируемого насоса, а их сливные гидролинии соединены с гидробаком, выходы первого дросселирующего гидрораспределителя соединены с входами гидродвигателя, первый выход второго дросселирующего гидрораспределителя соединен с штоковой полостью первого гидроцилиндра и с поршневой полостью второго гидроцилиндра, второй выход второго дросселирующего гидрораспределителя соединен с поршневой полостью первого гидроцилиндра и с штоковой полостью второго гидроцилиндра.
Пуск PC осуществляется в режиме стабилизации ПН, причем в этом режиме управляющими сигналами для приводов каналов вертикальной стабилизации (ВС) и горизонтальной стабилизации (ГС) являются сигналы с гироскопического датчика угла с учетом необходимых поправок и сигналы с датчика скорости, кинематически связанного с ПН.
В процессе пуска PC возмущающие воздействия при движении PC по направляющей и после выхода из ПН характеризуются различными значениями по величине и направлению. Данное обстоятельство объясняется двумя составляющими возмущений:
- трением PC по направляющей;
- силой от реакции струи PC.
При движении PC в пределах ПН преобладающей является составляющая возмущения от трения, при этом вектор силы, действующей на ПН, совпадает по направлению с вектором скорости PC. После выхода PC из ПН возмущающим воздействием является сила реакция струи из PC, а вектор силы, действующей на ПН, направлен навстречу вектору скорости PC.
За время движения PC по ПН происходит отклонение ПН на несколько миллирадиан в соответствии с направлением возмущающего момента в сторону за счет трения PC по ПН, а после выхода PC из ПН изменяется направление возмущающего момента за счет реакции струи PC на ПН и возникает колебательный процесс, обусловленный как возмущающим моментом, так и собственной колебательностью системы.
Недостатком прототипа является то, что система стабилизации и наведения ПН БМ РСЗО не обеспечивает отработку вышеуказанных возмущающих воздействий с минимальной ошибкой, вследствие отсутствия коррекции, позволяющей вводить упреждающий сигнал торможения приводами ВС и ГС до появления значительной ошибки по каналам ВС и ГС. Алгоритм данной коррекции заключается в формировании дополнительных сигналов при совпадении знаков (сигнатур) сигналов ошибки и ее производной (продифферцированого сигнала) и введении этих дополнительных сигналов на суммирующие усилители и далее, соответственно, для коррекции сигналов управления силовых приводов каналов ГС и ВС.
При этом, если данную коррекцию подключать на ограниченное время, например, только на время движения PC по направляющей и на первоначальный период после выхода PC из направляющей, то уровень введения корректирующих сигналов можно существенно увеличить.
Целью заявляемого технического решения является повышение точности стабилизации ПН и уменьшение угловых скоростей перемещения ПН к моменту схода PC.
Указанная цель достигается тем, что в систему наведения и стабилизации ПН БМ РСЗО, содержащую регулируемый насос с датчиком положения его люльки, гидробак, гидродвигатель, кинематически связанный с ПН, первый и второй суммирующие усилители, формирователь ошибки, задающее устройство, третий суммирующий усилитель, датчик давления, установленный в напорной гидролинии регулируемого насоса, первый и второй дросселирующие гидрораспределители, первый и второй гидроцилиндры, кинематически связанные с ПН, датчики абсолютного положения и абсолютной скорости, установленные на ПН, при этом выход задающего устройства соединен с первым неинвертирующим входом третьего суммирующего усилителя, второй инвертирующий вход которого соединен с выходом датчика положения люльки регулируемого насоса, третий инвертирующий вход третьего суммирующего усилителя соединен с выходом датчика давления, а выход третьего суммирующего усилителя соединен с управляющим входом регулируемого насоса, вход регулируемого насоса соединен с гидробаком, первый инвертирующий вход формирователя ошибки соединен с первым выходом датчика абсолютного положения, второй инвертирующий вход формирователя ошибки соединен со вторым выходом датчика абсолютного положения, первый инвертирующий вход первого суммирующего усилителя соединен с первым выходом датчика абсолютной скорости, первый инвертирующий вход второго суммирующего усилителя соединен со вторым выходом датчика абсолютной скорости, первый выход формирователя ошибки соединен со вторым неинвертирующим входом первого суммирующего усилителя, второй выход формирователя ошибки соединен со вторым неинвертирующим входом второго суммирующего усилителя, входы первого и второго дросселирующих гидрораспределителей гидролиниями соединены с выходом регулируемого насоса, а их сливные гидролинии соединены с гидробаком, выходы первого дросселирующего гидрораспределителя соединены с входами гидродвигателя, первый выход второго дросселирующего гидрораспределителя соединен с штоковой полостью первого гидроцилиндра и с поршневой полостью второго гидроцилиндра, второй выход второго дросселирующего гидрораспределителя соединен с поршневой полостью первого гидроцилиндра и с штоковой полостью второго гидроцилиндра, дополнительно введены первое и второе нелинейные корректирующие звенья и звено передачи команды «СТАРТ» с таймером, причем первые входы первого и второго нелинейных корректирующих звеньев соединены с первым и вторым выходами формирователя ошибки соответственно, выходы первого и второго нелинейных корректирующий звеньев соединены с третьими неинвертирующими входами первого и второго суммирующих усилителей соответственно, вторые входы первого и второго нелинейных корректирующих звеньев соединены с первым и вторым выходами звена передачи команды «СТАРТ» с таймером соответственно.
Вариант исполнения каждого нелинейного корректирующего звена содержит дифференцирующее звено с отказом на низких частотах, дифференцирующее звено с отказом на высоких частотах, звено выделения временных периодов совпадения знаков дифференцирующих звеньев, первый и второй ключи, звено выделения знака входного сигнала (звено сигнатуры), масштабирующее звено, причем первый вход нелинейного корректирующего звена соединен с входом звена выделения знака входного сигнала и с входами дифференцирующих звеньев с отказом на низких и высоких частотах, выходы которых соединены с первым и вторым входами звена выделения временных периодов совпадения знаков дифференцирующих звеньев соответственно, выход звена выделения временных периодов совпадения знаков дифференцирующих звеньев соединен с управляющим входом первого ключа, второй вход нелинейного корректирующего звена соединен с управляющим входом второго ключа, вход первого ключа соединен с выходом звена выделения знака входного сигнала (звена сигнатуры), выход первого ключа соединен с входом второго ключа, выход которого через масштабирующее звено соединен с выходом нелинейного корректирующего звена.
Вариант исполнения звена передачи команды «СТАРТ» с таймером представляет собой коммутирующее релейное звено сигнала пуска PC с таймером, настроенным на определенное время отключения после получения сигнала пуска PC. Материалы заявки поясняются графическими материалами, где:
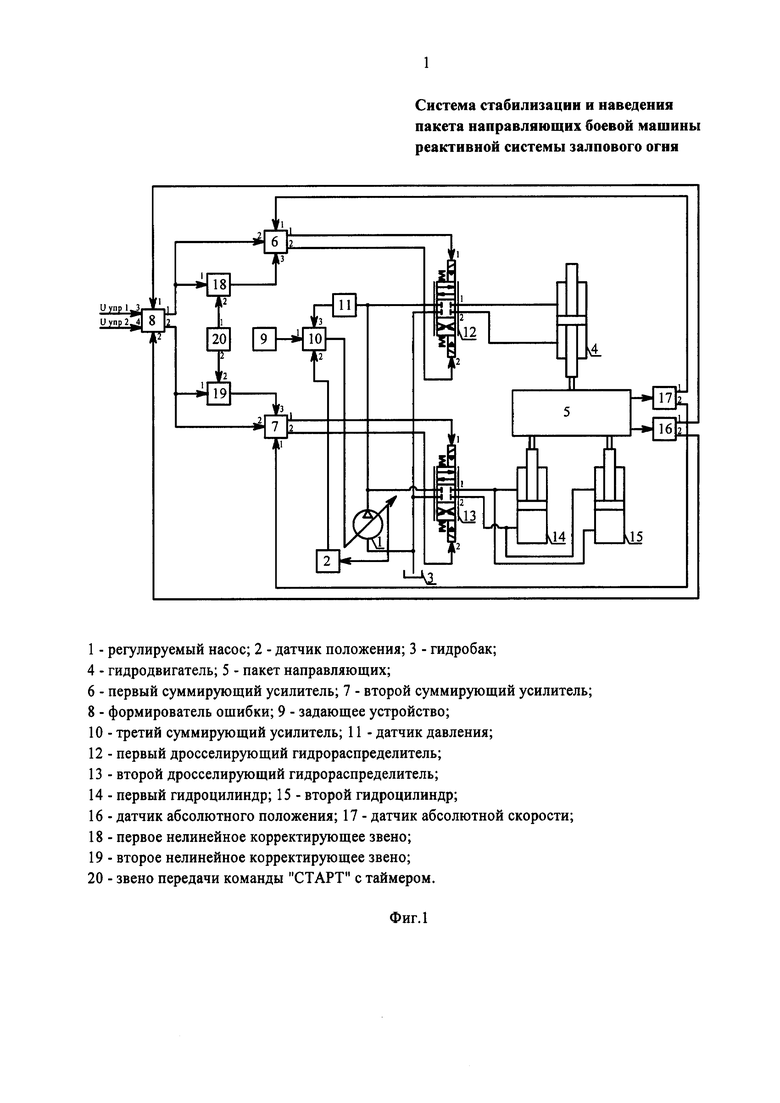
- на фиг. 1 представлена структурная схема заявляемого устройства;
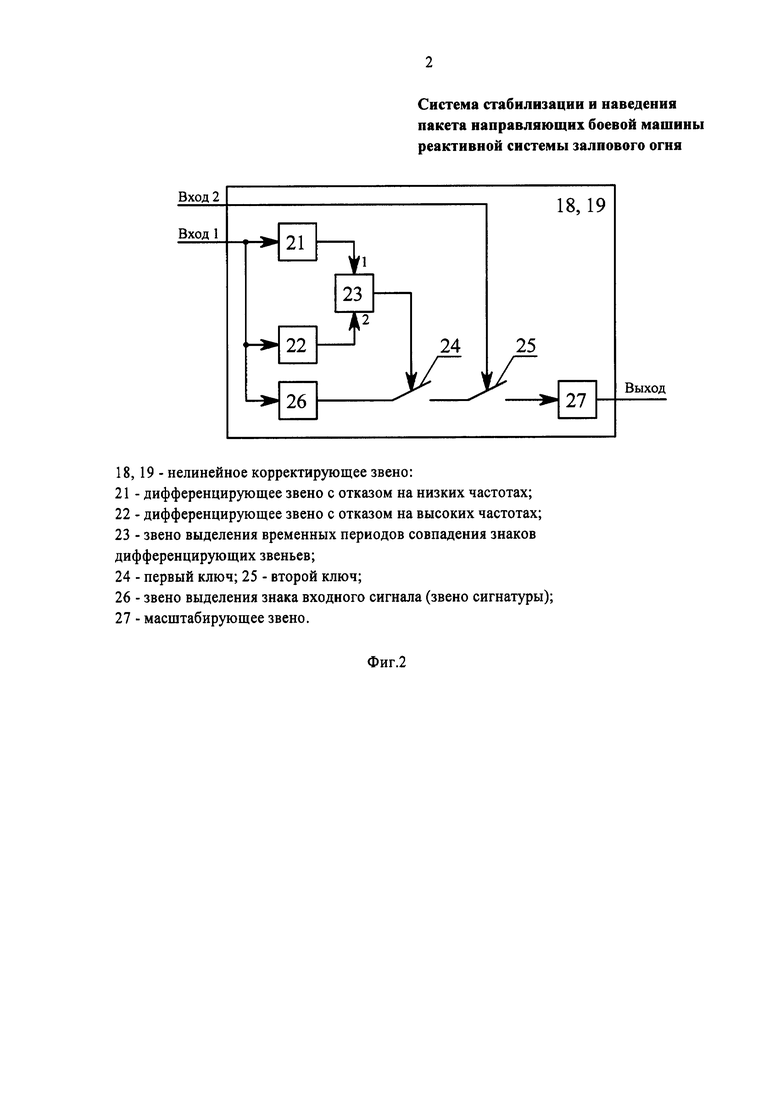
- на фиг. 2 представлена структурная схема нелинейного корректирующего звена;
Система наведения и стабилизации ПН БМ РСЗО (Фиг. 1) содержит регулируемый насос 1 с датчиком положения его люльки 2, гидробак 3, гидродвигатель 4, кинематически связанный с ПН 5, первый 6 и второй 7 суммирующие усилители, формирователь ошибки 8, задающее устройство 9, третий суммирующий усилитель 10, датчик давления 11, установленный в напорной гидролинии регулируемого насоса 1, первый 12 и второй 13 дросселирующие гидрораспределители, первый 14 и второй 15 гидроцилиндры, кинематически связанные с ПН 5, датчики абсолютного положения 16 и абсолютной скорости 17, установленные на ПН 5, первое 18 и второе 19 нелинейные корректирующие звенья, звено 20 передачи команды «СТАРТ» с таймером, при этом выход задающего устройства 9 соединен с первым неинвертирующим входом третьего суммирующего усилителя 10, второй инвертирующий вход третьего суммирующего усилителя 10 соединен с выходом датчика положения 2 люльки регулируемого насоса 1, третий инвертирующий вход третьего суммирующего усилителя 10 соединен с выходом датчика давления 11, выход третьего суммирующего усилителя 10 соединен с управляющим входом регулируемого насоса 1, вход регулируемого насоса 1 соединен с гидробаком 3, первый инвертирующий вход формирователя ошибки 8 соединен с первым выходом датчика абсолютного положения 16 (канал ВС), второй инвертирующий вход формирователя ошибки 8 соединен со вторым выходом датчика абсолютного положения 16 (канал ГС), первый инвертирующий вход первого суммирующего усилителя 6 соединен с первым выходом датчика абсолютной скорости 17 (канал ВС), первый инвертирующий вход второго суммирующего усилителя 7 соединен со вторым выходом датчика абсолютной скорости 17 (канал ГС), первый выход формирователя ошибки 8 соединен со вторым неинвертирующим входом первого суммирующего усилителя 6 и со входом первого нелинейного корректирующего звена 18, второй выход формирователя ошибки 8 соединен со вторым неинвертирующим входом второго суммирующего усилителя 7 и со входом второго нелинейного корректирующего звена 19, выход первого суммирующего усилителя 6 соединен с первым и вторым управляющими входами первого дросселирующего гидрораспределителя 12, выход второго суммирующего усилителя 7 соединен с первым и вторым управляющими входами второго дросселирующего гидрораспределителя 13, входы первого 12 и второго 13 дросселирующих гидрораспределителей гидролиниями соединены с выходом регулируемого насоса 1, а их сливные гидролинии соединены с гидробаком 3, выходы первого дросселирующего гидрораспределителя 12 соединены с входами гидро двигателя 4, первый выход второго дросселирующего гидрораспределителя 13 соединен с штоковой полостью первого гидроцилиндра 14 и с поршневой полостью второго гидроцилиндра 15, второй выход второго дросселирующего гидрораспределителя 13 соединен с поршневой полостью первого гидроцилиндра 14 и с штоковой полостью второго гидроцилиндра 15, выход звена передачи команды «СТАРТ» с таймером 20 соединен со вторыми входами первого 18 и второго 19 нелинейных корректирующих звеньев.
Каждое нелинейное корректирующее звено 18 или 19 (Фиг. 2) содержит дифференцирующее звено с отказом на низких частотах 21 (исключение постоянной составляющей), дифференцирующее звено с отказом на высоких частотах 22 (дифференцирование рабочих частот 1-2 Гц), звено выделения временных периодов совпадения знаков дифференцирующих звеньев 23, первый 24 и второй 25 ключи, звено выделения знака входного сигнала (звено сигнатуры) 26, масштабирующее звено 27, причем первый вход нелинейного корректирующего звена 18 или 19 соединен с входом звена выделения знака входного сигнала 26 и с входами дифференцирующих звеньев с отказом на низких 21 и высоких 22 частотах, выходы которых соединены с первым и вторым входами звена выделения временных периодов совпадения знаков дифференцирующих звеньев 23 соответственно, выход которого соединен с управляющим входом первого ключа 24, второй вход нелинейного корректирующего звена 18 или 19 соединен с управляющим входом второго ключа 25, вход первого ключа 24 соединен с выходом звена выделения знака входного сигнала (звена сигнатуры) 26, выход первого ключа 24 соединен с входом второго ключа 25, выход которого через масштабирующее звено 27 соединен с выходом нелинейного корректирующего звена 18 или 19.
Система стабилизации ПН БМ РСЗО работает следующим образом.
При сходе PC из ПН 5 возникают моментные возмущения, приводящие к изменению положения ПН 5 в абсолютных координатах. Датчик абсолютного положения 16, установленный на ПН 5, формирует корректирующие сигналы, пропорциональные изменению положения ПН 5, а датчик абсолютной скорости 17, установленный также на ПН 5, формирует корректирующие сигналы, пропорциональные изменению скорости положения ПН 5. Сигналы с первого и второго выходов датчика абсолютного положения 16 поступают на соответствующие первый и второй инвертирующие входы формирователя ошибки 8. ПН 5 с PC перемещается в заданное направление стрельбы, относительно которого в дальнейшем будет осуществляться его стабилизация, посредством подачи управляющих сигналов Uynp1 и Uynp2 на третий и четвертый входы формирователя ошибки 8. В формирователе ошибки 8 сигналы обратных связей по абсолютным координатам суммируются с управляющими сигналами Uynp1 и Uynp2, задающими направление ПН 5 на цель. Сигналы с первого и второго выходов формирователя ошибки 8 поступают на вторые не-инвертирующие входы первого 6 и второго 7 суммирующих усилителей (каналы ВС и ГС), а сигналы с первого и второго выходов датчика абсолютной скорости 17 поступают на первые инвертирующие входы первого 6 и второго 7 суммирующих усилителей (каналы ВС и ГС).
Кроме того сигналы с формирователя ошибки 8 поступают на первые входы нелинейных корректирующих звеньев 18 и 19. С первых входов нелинейных корректирующих звеньев 18 и 19 (фиг. 2) сигналы поступают на входы дифференцирующего звена с отказом на низких частотах 21 (исключение постоянной составляющей) и дифференцирующего звена с отказом на высоких частотах 22 (дифференцирование рабочих частот 1-2 Гц), а также на вход звена выделения знака входного сигнала 26. С выходов дифференцирующего звена с отказом на низких частотах 21 и дифференцирующего звена с отказом на высоких частотах 22 сигналы поступают на входы звена выделения временных периодов совпадения знаков дифференцирующих звеньев 23. При воздействии возмущающих моментов, когда ошибка системы увеличивается, сигналы формирователя ошибки 8 и продифференцированный сигнал от ошибки совпадают по знаку. При этом с выхода звена выделения временных периодов совпадения знаков дифференцирующих звеньев 23 формируется разрешающий сигнал на управляющий вход первого ключа 24. Второй разрешающий сигнал поступает от звена 20 передачи команды «СТАРТ» с таймером на вторые входы нелинейных корректирующих звеньев 18 и 19 и далее на управляющий вход второго ключа 25. При наличии разрешающих сигналов, сигнал нелинейной коррекции с выхода звена выделения знака 26 через первый ключ 24 и второй ключ 25 поступает на вход масштабирующего звена 27, с выхода которого, являющегося выходом нелинейных корректирующих звеньев 18 и 19, приходит на третий неинвертирующий вход суммирующего усилителя 6 (или 7). Таким образом вводится дополнительный фазоопережающий сигнал от нелинейных корректирующих звеньев 18 и 19 для уменьшения ошибки стабилизации без потери устойчивости.
Для реализации нелинейной коррекции на ограниченное время в систему введено звено 20 передачи команды «СТАРТ» с таймером, по сигналу которого разрешается введение сигнала коррекции при условии получения разрешения от звена выделения временных периодов совпадения знаков дифференцирующих звеньев 23. Время разрешения действия сигнала нелинейной коррекции определяется таймером, при этом началом отсчета времени является появление команды «СТАРТ», а окончание определяется уставкой таймера, заданной с учетом времени схода PC с ПН.
Выходные сигналы с первого и второго выходов первого 6 и второго 7 (фиг. 1) суммирующих усилителей поступают на первые и вторые управляющие входы первого 12 и второго 13 дросселирующих гидрораспределителей соответственно, вызывая изменение положения их золотников. В соответствии с положением золотников первого 12 и второго 13 дросселирующих гидрораспределителей изменяется расход рабочей жидкости, поступающей в гидродвигатель 4 (канал ВС) и первый 14 и второй 15 гидроцилиндры (канал ГС), в результате чего ПН 5 перемещается в направлении уменьшения ошибки первоначально заданного положения, до тех пор, пока на первом и втором выходах формирователя ошибки 8 не сформируются сигналы минимальных уровней.
Для поддержания постоянного давления в гидросистеме задающее устройство 9, выполненное, например, в виде делителя напряжения, формирует на своем выходе постоянный сигнал, который поступает на первый неинвертирующий вход третьего суммирующего усилителя 10, на второй и третий инвертирующие входы которого подаются сигналы с выходов датчиков положения 2 и давления 11 соответственно. Сформированный и усиленный таким образом выходной сигнал с выхода третьего суммирующего усилителя 10 поступает на управляющий вход регулируемого насоса 1, что позволяет управлять его производительностью. Таким образом, в заявляемой системе формируется отрицательная связь по давлению, которая позволяет стабилизировать давление в системе при изменении расхода рабочей жидкости, проходящей через первый 12 и второй 13 дросселирующие гидрораспределители.
В качестве датчика абсолютного положения и датчика абсолютной скорости в данной системе использованы гироскопические системы.
Математическое моделирование структуры заявляемой системы стабилизации и наведения ПН БМ РСЗО, а также пуски PC при испытаниях БМ 9А53 показали уменьшение угловых скоростей перемещения ПН к моменту схода PC.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ ПАКЕТА НАПРАВЛЯЮЩИХ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ | 2011 |
|
RU2503908C2 |
| Система наведения и стабилизации пакета направляющих боевой машины реактивной системы залпового огня | 2017 |
|
RU2669903C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ПАКЕТА НАПРАВЛЯЮЩИХ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ | 2009 |
|
RU2387943C1 |
| Электрогидравлическая система управления | 2016 |
|
RU2641192C1 |
| Электрогидравлическая система | 2021 |
|
RU2797330C2 |
| Электрогидравлическая система управления | 2018 |
|
RU2708477C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТНЫМ КОЛЬЦОМ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2017 |
|
RU2748156C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТНЫМ КОЛЬЦОМ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2017 |
|
RU2667418C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| Стенд для испытания рулевых механизмов транспортных средств | 1985 |
|
SU1280376A1 |
Система стабилизации и наведения пакета направляющих боевой машины реактивной системы залпового огня (ПН БМ РСЗО) содержит регулируемый насос, датчик положения его люльки, гидробак, гидродвигатель, три суммирующих усилителя, формирователь ошибки, задающее устройство, датчик давления, два дросселирующих гидрораспределителя, два гидроцилиндра, датчик абсолютного положения, датчик абсолютной скорости, два нелинейных корректирующих звена, звено передачи команды «СТАРТ» с таймером, соединенные определенным образом. Обеспечивается повышение точности стабилизации ПН БМ РСЗО и уменьшение угловых скоростей перемещения ПН к моменту схода РС. 1 з.п. ф-лы, 2 ил.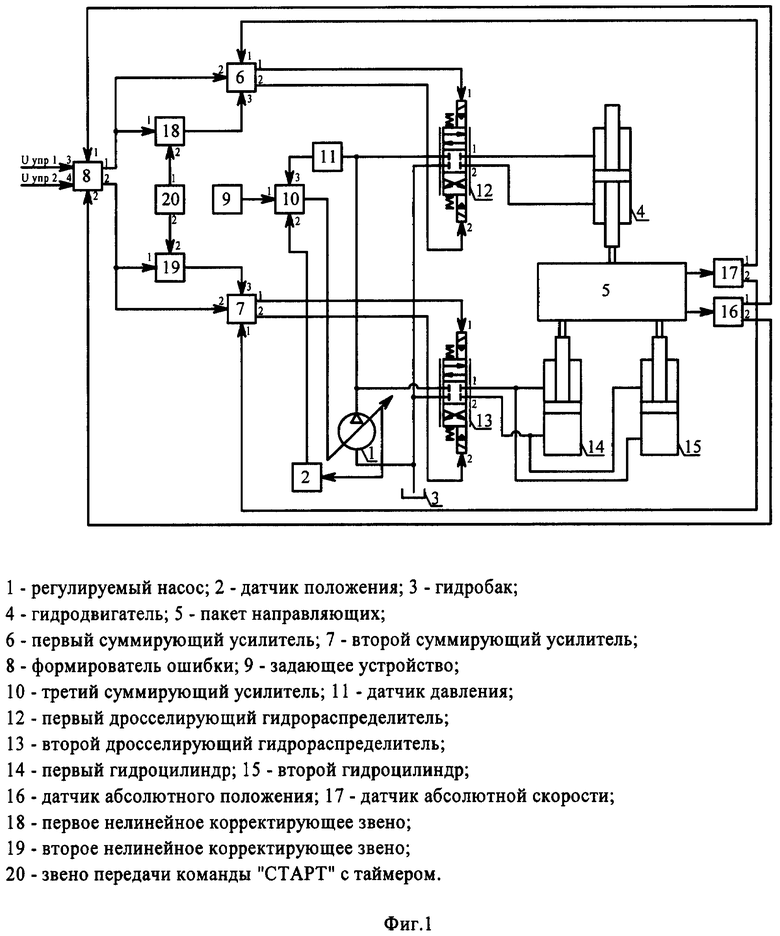
1. Система стабилизации пакета направляющих боевой машины реактивной системы залпового огня, содержащая регулируемый насос с датчиком положения его люльки, гидробак, гидродвигатель, кинематически связанный с пакетом направляющих с реактивными снарядами, первый и второй суммирующие усилители, формирователь ошибки, задающее устройство, третий суммирующий усилитель, датчик давления, установленный в напорной гидролинии регулируемого насоса, первый и второй дросселирующие гидрораспределители, первый и второй гидроцилиндры, кинематически связанные с пакетом направляющих, датчики абсолютного положения и абсолютной скорости, установленные на пакете направляющих, при этом выход задающего устройства соединен с первым неинвертирующим входом третьего суммирующего усилителя, второй инвертирующий вход которого соединен с выходом датчика положения люльки регулируемого насоса, третий инвертирующий вход третьего суммирующего усилителя соединен с выходом датчика давления, а выход третьего суммирующего усилителя соединен с управляющим входом регулируемого насоса, вход регулируемого насоса соединен с гидробаком, первый инвертирующий вход формирователя ошибки соединен с первым выходом датчика абсолютного положения, второй инвертирующий вход формирователя ошибки соединен со вторым выходом датчика абсолютного положения, первый инвертирующий вход первого суммирующего усилителя соединен с первым выходом датчика абсолютной скорости, первый инвертирующий вход второго суммирующего усилителя соединен со вторым выходом датчика абсолютной скорости, первый выход формирователя ошибки соединен со вторым неинвертирующим входом первого суммирующего усилителя, второй выход формирователя ошибки соединен со вторым неинвертирующим входом второго суммирующего усилителя, входы первого и второго дросселирующих гидрораспределителей гидролиниями соединены с выходом регулируемого насоса, а их сливные гидролинии соединены с гидробаком, выходы первого дросселирующего гидрораспределителя соединены с входами гидродвигателя, первый выход второго дросселирующего гидрораспределителя соединен с штоковой полостью первого гидроцилиндра и с поршневой полостью второго гидроцилиндра, второй выход второго дросселирующего гидрораспределителя соединен с поршневой полостью первого гидроцилиндра и с штоковой полостью второго гидроцилиндра, отличающаяся тем, что в нее дополнительно введены первое и второе нелинейные корректирующие звенья и звено передачи команды «СТАРТ» с таймером, причем первые входы первого и второго нелинейных корректирующих звеньев соединены с первым и вторым выходами формирователя ошибки соответственно, выходы первого и второго нелинейных корректирующих звеньев соединены с третьими неинвертирующими входами первого и второго суммирующих усилителей соответственно, вторые входы первого и второго нелинейных корректирующих звеньев соединены с первым и вторым выходами звена передачи команды «СТАРТ» с таймером соответственно.
2. Система по п. 1, отличающаяся тем, что каждое нелинейное корректирующее звено содержит дифференцирующее звено с отказом на низких частотах, дифференцирующее звено с отказом на высоких частотах, звено выделения временных периодов совпадения знаков дифференцирующих звеньев, первый и второй ключи, звено выделения знака входного сигнала (звено сигнатуры), масштабирующее звено, причем первый вход нелинейного корректирующего звена соединен с входом звена выделения знака входного сигнала и с входами дифференцирующих звеньев с отказом на низких и высоких частотах, выходы которых соединены с первым и вторым входами звена выделения временных периодов совпадения знаков дифференцирующих звеньев соответственно, выход звена выделения временных периодов совпадения знаков соединен с управляющим входом первого ключа, второй вход нелинейного корректирующего звена соединен с управляющим входом второго ключа, вход первого ключа соединен с выходом звена выделения знака входного сигнала (звена сигнатуры), выход первого ключа соединен с входом второго ключа, выход которого через масштабирующее звено соединен с выходом нелинейного корректирующего звена.
| СИСТЕМА СТАБИЛИЗАЦИИ ПАКЕТА НАПРАВЛЯЮЩИХ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ | 2009 |
|
RU2387943C1 |
| 0 |
|
SU153534A1 | |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАХВАТОМ ЦЕЛИ И ПУСКОМ РАКЕТЫ | 2013 |
|
RU2554272C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ И ОГНЕМ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ (ВАРИАНТЫ) | 1999 |
|
RU2167380C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ПАКЕТА НАПРАВЛЯЮЩИХ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ | 2011 |
|
RU2503908C2 |

