Устройство относится к области измерительной техники и может быть использовано в системах измерительного контроля.
Данное устройство позволяет сформировать функцию преобразования датчика давления с учетом воздействия дополнительных факторов, позволяющую осуществить валидацию и верификацию [1] цифрового двойника [2] датчика давления.
Известно устройство оценки состояния и идентификации параметров моделей динамических систем [3], которое предназначено для оценки состояния и идентификации параметров моделей динамических систем. Известно устройство идентификации параметров акселерометра [4], которое используется для коррекции динамической погрешности датчиков ускорения в условиях параметрической неопределенности. Недостатком заявленных устройств является возможность их применения только для дискретных систем, в то время как передаточная характеристика большинства датчиков имеет непрерывный вид.
Наиболее близким по технической сущности к заявленному изобретению является устройство идентификации параметров динамических звеньев информационно-управляющих систем [5], которое используется для уточнения динамики модели конкретного динамического звена в реальном масштабе времени.
Цель изобретения - сформировать функцию преобразования датчика давления с учетом воздействия дополнительных факторов, позволяющую обеспечить валидацию и верификацию цифрового двойника датчика давления.
Указанный технический результат достигается в устройстве за счет применения дополнительных блоков учета воздействия внешних факторов на изменение функции преобразования датчика давления при его эксплуатации в реальных условиях.
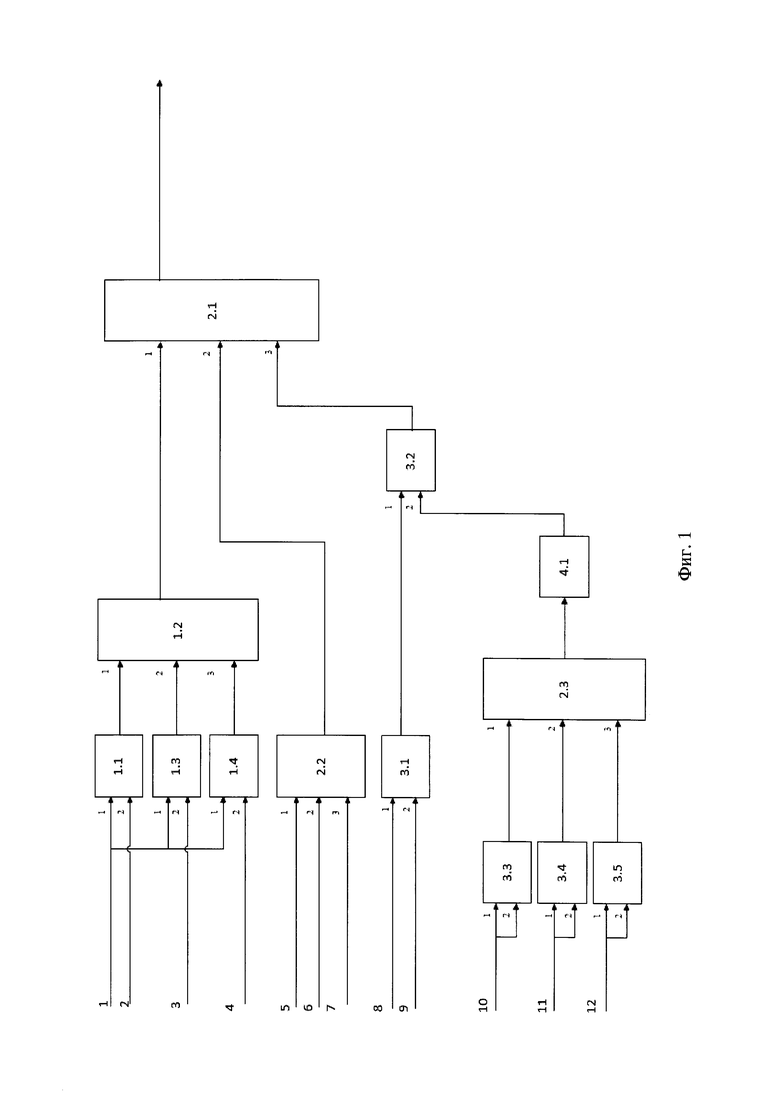
Сущность изобретения поясняется чертежом, где на фиг. 1 представлены следующие блоки:
1.1 - первый блок формирования функции;
1.2 - второй блок формирования функции;
1.3 - третий блок формирования функции;
1.4 - четвертый блок формирования функции;
2.1 - первый блок формирования суммы;
2.2 - второй блок формирования суммы;
2.3 - третий блок формирования суммы;
3.1 - первый блок формирования умножения;
3.2 - второй блок формирования умножения;
3.3 - третий блок формирования умножения;
3.4 - четвертый блок формирования умножения;
3.5 - пятый блок формирования умножения;
4.1 - первый блок извлечения квадратного корня.
При этом первый вход первого, третьего и четвертого блока формирования функции является первым входом устройства; второй вход первого блока формирования функции является вторым входом устройства; второй вход третьего блока формирования функции является третьим входом устройства; второй вход четвертого блока формирования функции является четвертым входом устройства; первый вход второго блока формирования суммы является пятым входом устройства, второй вход второго блока формирования суммы является шестым входом устройства, третий вход второго блока формирования суммы является седьмым входом устройства; первый вход первого блока формирование умножения является восьмым входом устройства, второй вход первого блока формирования умножения является девятым входом устройства; первый и второй вход третьего блока формирования умножения является десятым входом устройства; первый и второй вход четвертого блока формирования умножения является одиннадцатым входом устройства; первый и второй вход пятого блока формирования умножения является двенадцатым входом устройства; выход первого блока формирования функции является первым входом второго блока формирования функции; выход третьего блока формирования функции является вторым входом второго блока формирования функции; выход четвертого блока формирования функции является третьим входом второго блока формирования функции, выход второго блока формирования функции является первым входом первого блока формирования суммы; выход второго блока формирования суммы является вторым входом первого блока формирования суммы; выход первого блока формирования умножения является первым входом второго блока формирования умножения; выход третьего блока формирования умножения является первым входом третьего блока формирования суммы, выход четвертого блока формирования умножения является вторым входом третьего блока формирования суммы, выход пятого блока формирования умножения является третьим входом третьего блока формирования суммы; выход третьего блока формирования суммы является входом первого блока извлечения квадратного корня; выход первого блока извлечения квадратного корня является вторым входом второго блока формирования умножения; выход второго блока формирования умножения является третьим входом первого блока формирования суммы; выход первого блока формирования суммы является выходом устройства.
Пояснить работу устройства позволяют следующие математические выкладки:
1. Дано:
а) функция преобразования датчика YD=f(x), выражающая зависимость выходного параметра Y от входного параметра х, при этом f∈F - множеству возможных функций преобразований;
б) математическая модель измерений, в которой результат измерений X представлен в виде
Х=YD+Δ∑=f(х)+(Δсист+Δсл),
где Δ∑ - суммарная погрешность датчика;
Δсл - случайная составляющая погрешности датчика;
Δсист - систематическая составляющая погрешности датчика.
2. Величина систематической и случайной составляющих погрешности датчика напрямую зависят от множества различных воздействий ϕn∈Ψ, где  на датчик в процессе измерений. В этом случае функцию преобразования следует представить как YD(ϕ)=f(x|ϕn).
на датчик в процессе измерений. В этом случае функцию преобразования следует представить как YD(ϕ)=f(x|ϕn).
3. С учетом множества различных воздействий, функция преобразования датчика примет вид

суммарная систематическая погрешность

и суммарная случайная погрешность

где t∑ - коэффициент Стьюдента;
ko - поправочный коэффициент, зависящий от достоверности контроля;
σn - среднеквадратическое отклонение п-и случайной составляющей погрешности.
Таким образом, модель измерений в условиях множества различных воздействий на датчик в процессе измерений примет вид

Устройство работает следующим образом. В исходном состоянии на входы устройства поступают начальные данные:
х - на первый вход блоков 1.1, 1.3,1.4;
ϕ1 - на второй вход блока 1.1;
ϕ2 - на второй вход блока 1.3;
ϕ3 - на второй вход блока 1.4;
 - на первый вход блока 2.2;
- на первый вход блока 2.2;
 - на второй вход блока 2.2;
- на второй вход блока 2.2;
 - на третий вход блока 2.2;
- на третий вход блока 2.2;
t∑ - на первый вход блока 3.1;
kp - на второй вход блока 3.1;
σ1 - на первый и второй вход блока 3.3;
σ2 - на первый и второй вход блока 3.4;
σ3 - на первый и второй вход блока 3.5.
На выходе блока 1.1 формируется значение Y0 (х, ϕ1) и поступает на первый вход блока 1.2; на выходе блока 1.3 формируется значение Y0 (х, ϕ2) и поступает на второй вход блока 1.2; на выходе блока 1.4 формируется значение Y0 (х, ϕ3) и поступает на третий вход блока 1.2, на выходе которого формируется значение данных Y0 (х, Ψ) и поступает на первый вход блока 2.1; на выходе блока 2.2 формируется значение  и поступает на второй вход блока 2.1; на выходе блока 3.1 формируется значение t∑⋅kp и поступает на первый вход блока 3.2; на выходе блока 3.3 формируется значение
и поступает на второй вход блока 2.1; на выходе блока 3.1 формируется значение t∑⋅kp и поступает на первый вход блока 3.2; на выходе блока 3.3 формируется значение  и поступает на первый вход блока 2.3; на выходе блока 3.4 формируется значение
и поступает на первый вход блока 2.3; на выходе блока 3.4 формируется значение  и поступает на второй вход блока 2.3; на выходе блока 3.5 формируется значение
и поступает на второй вход блока 2.3; на выходе блока 3.5 формируется значение  и поступает на третий вход блока 2.3, на выходе которого формируется значение
и поступает на третий вход блока 2.3, на выходе которого формируется значение  и поступает на вход блока 4.1; на выходе блока 4.1 формируется значение
и поступает на вход блока 4.1; на выходе блока 4.1 формируется значение  и поступает на второй вход блока 3.2, на выходе которого формируется значение
и поступает на второй вход блока 3.2, на выходе которого формируется значение  и поступает на третий вход блока 2.1; на выходе блока 2.1 формируется значение
и поступает на третий вход блока 2.1; на выходе блока 2.1 формируется значение 
ЛИТЕРАТУРА
1. ГОСТ ISO/IEC 17025-2019.
2. ГОСТ Р 57700.37-2021.
3. RU 2653939, от 15.05.2018 г.
4. RU 2628279, от 15.08.2017 г.
5. RU 2632681, от 09.10.2017 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь координат | 1990 |
|
SU1784976A1 |
| Устройство идентификации параметров передаточной характеристики MEMS-акселерометра | 2021 |
|
RU2767012C1 |
| Устройство для организации базы эталонов единиц величин | 2020 |
|
RU2752800C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ ДИНАМИЧЕСКИХ СИСТЕМ НА ОСНОВЕ ВАРИАЦИОННЫХ ПРИНЦИПОВ | 2011 |
|
RU2464615C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 1994 |
|
RU2086935C1 |
| Устройство идентификации параметров динамических звеньев информационно-управляющих систем | 2014 |
|
RU2632681C2 |
| Устройство оценки параметров возмущенных процессов с использованием максимума обобщенной мощности | 2019 |
|
RU2713875C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ БОРТОВЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО РЕЗУЛЬТАТАМ ОЦЕНКИ ПАРАМЕТРОВ | 2013 |
|
RU2544765C1 |
| КОНВЕЙЕРНЫЙ АРИФМЕТИЧЕСКИЙ УМНОЖИТЕЛЬ | 2013 |
|
RU2546072C1 |
| Устройство идентификации параметров акселерометра | 2014 |
|
RU2628279C2 |
Устройство относится к области измерительной техники и может быть использовано в системах измерительного контроля. Устройство содержит: первый, второй, третий и четвертый блоки формирования функции; первый, второй и третий блоки формирования суммы, первый, второй, третий, четвертый и пятый блоки формирования умножения, первый блок извлечения квадратного корня. Техническим результатом при реализации заявленного решения является повышение точности сформирования функции преобразования датчика давления с учетом воздействия дополнительных факторов, позволяющую осуществить валидацию и верификацию цифрового двойника датчика давления. Указанный технический результат достигается в устройстве за счет применения дополнительных блоков учета воздействия внешних факторов на изменение функции преобразования датчика давления при его эксплуатации в реальных условиях. 1 ил.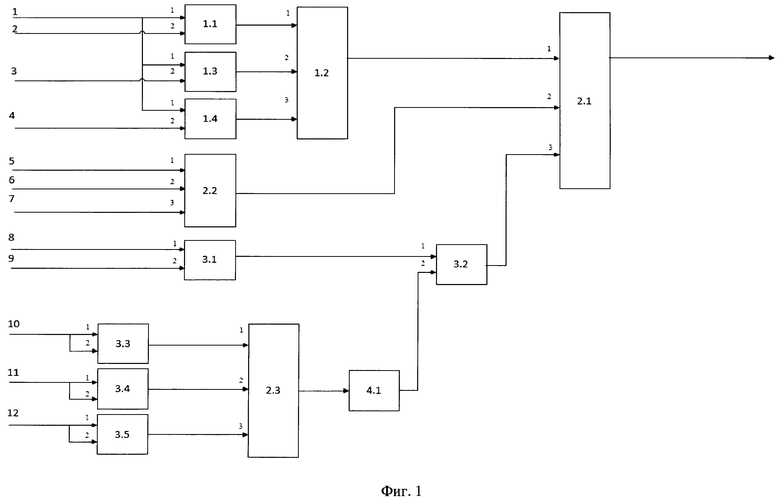
Устройство формирования функции преобразования датчика давления с учетом воздействия дополнительных факторов, содержащее совпадающие с аналогом четыре блока формирования функции, первый блок формирования суммы; первый, второй, третий, четвертый и пятый блоки формирования умножения, соединенные следующим образом: первые входы первого, третьего и четвертого блоков формирования функции являются первым входом устройства; вторые входы первого, третьего и четвертого блоков формирования функции являются вторым, третьим и четвертым входами устройства соответственно; выходы первого, третьего и четвертого блоков формирования функции являются первым, вторым и третьим входами второго блока формирования функции соответственно; выход второго блока формирования функции является первым входом первого блока формирования суммы; первый и второй входы первого блока формирования умножения являются восьмым и девятым входами устройства, выход первого блока формирования умножения является первым входом второго блока формирования умножения; выход второго блока формирования умножения является третьим входом первого блока формирования суммы; первый и второй входы третьего, четвертого и пятого блоков умножения являются десятым, одиннадцатым и двенадцатым входами устройства соответственно, отличающееся тем, что в него дополнительно введены второй и третий блоки формирования суммы, первый блок извлечения квадратного корня, соединенные определенным образом: первый, второй и третий входы второго блока формирования суммы являются пятым, шестым и седьмым входами устройства соответственно; выход второго блока формирования суммы является вторым входом первого блока формирования суммы; выходы третьего, четвертого и пятого блоков формирования умножения являются первым, вторым и третьим входами третьего блока формирования суммы; выход третьего блока формирования суммы является входом первого блока извлечения квадратного корня, выход которого является вторым входом второго блока формирования умножения; выход первого блока формирования суммы является выходом устройства.
| Устройство идентификации параметров динамических звеньев информационно-управляющих систем | 2014 |
|
RU2632681C2 |
| ДАТЧИКИ ДАВЛЕНИЯ С ЧАСТОТНЫМ ВЫХОДНЫМ СИГНАЛОМ НА ОСНОВЕ НАНО- И МИКРОЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ С УМЕНЬШЕННЫМ ВЛИЯНИЕМ ТЕМПЕРАТУРЫ, Ж | |||
| Труды Международного симпозиума "Надежность и качество", 2010 | |||
| Статья: "ИНЖЕНЕРНАЯ МЕТОДИКА РАСЧЕТА ФУНКЦИИ ПРЕОБРАЗОВАНИЯ АМПЛИТУДНЫХ ВОЛОКОННО-ОПТИЧЕСКИХ ДАТЧИКОВ", Ж | |||
| ОМСКИЙ НАУЧНЫЙ | |||
