Изобретение относится к области обработки измерительной информации и может быть- использовано в геодезических системах для преобразования пространственных координат.
Известны устройства для преобразования координат, содержащие регистры, счетчики, логические схемы и арифметические устройства.
Недостатком данных устройств является то, что они осуществляют простые линейные преобразования координат и не могут выполнять преобразования при нелинейной связи параметров, в частности, не могут быть использованы для определения пространственного местоположения точки пересечения трех сферических поверхностей положения.
Наиболее близким по технической сущности является преобразователь координат, содержащий блок управления, блок постоянной памяти, сумматоры координат, задающий генератор, арифметический блок,
схему сравнения, ключ, три регистра координат и мультиплексор. Данное устройство может быть использовано для определения пространственного местоположения точки пересечения трех сферических поверхностей.
Однако данное устройство обладает низким быстродействием (следствие использования итерационной (многошаговой) процедуры формирования оценок), а также ограниченными функциональными возможностями - не позволяет определять точку пересечения трех эллипсоидов вращения (а только точку пересечения трех сфер) и вследствие этого не может быть испол ьзова- но в эллиптических измерительных системах.
Цель изобретения - расширение класса решаемых задач за счет возможности определения точки пересечения трех эллипсоидов вращения,
Поставленная цель достигается тем, что в известное устройство, содержащее блок
сл
С
,
N
XI
™
бращения матриц, блок памяти констант, ри группы умножителей, четыре группы умматоров, согласно изобретению введеы два блока умножения матриц, группа локов деления, блок вычисления дробно- ациональной функции, причем входы первого, второго и третьего операндов преобразователя соединены с входами деителей соответствующих блоков деления группы, и входами соответствующих сомноителей соответствующих умножителей ервой группы, входы делимых блоков деле- ния группы соединены с соответствующими выходами блока памяти констант, выходы блоков деления группы соединены с входами соответствующих слагаемых соответствующих сумматоров первой группы,выходы сумматоров первой группы соединены с соответствующими информационными входами блока обращения матриц, выходы которого соединены с соответствующими входами первых сомножителей первого бло а умножения матриц, входы вторых со- к .ожителей которого соединены с выходами соответствующих сумматоров первой группы, выходы первого блока умножения матриц соединены с соответствующими входами первыхсомножителей второго Олока множения матриц, входы вторых сомножителей которых соединены с соответствующими выходами блока памяти констант, выходы второго блока умножений матриц соединены с входами первых слагаемых соответствующих сумматоров второй группы, входы вторых слагаемых которых соединены с соответствующими выходами блока памяти констант, выходы умножителей первой группы, второго блока умножения матриц и сумматоров второй группы Соединены с входами соответствующих сомножителей соответствующих умножителей второй группы, выходы которых соединены с входами соответствующих сла- гаемых соответствующих сумматоров третьей группы, выходы которых соединены с входами операндов блока вычисления дробно-рациональной функции, выход которого соединен с входами первых сомножителей умножителей третьей группы, выходы которых соединены со входами первых слагаемых сумматоров четвертой группы,выходы первого блока умножения матриц соединены с входами вторых сомножителей соответствующих умножителей третьей группы и входами вторых слагаемых соответствующих сумматоров четвертой гр уппы, выходы блока вычисления дробно- рациональной функции и выходы сумматоров четвертой группы соединены с выходами результата преобразователя.
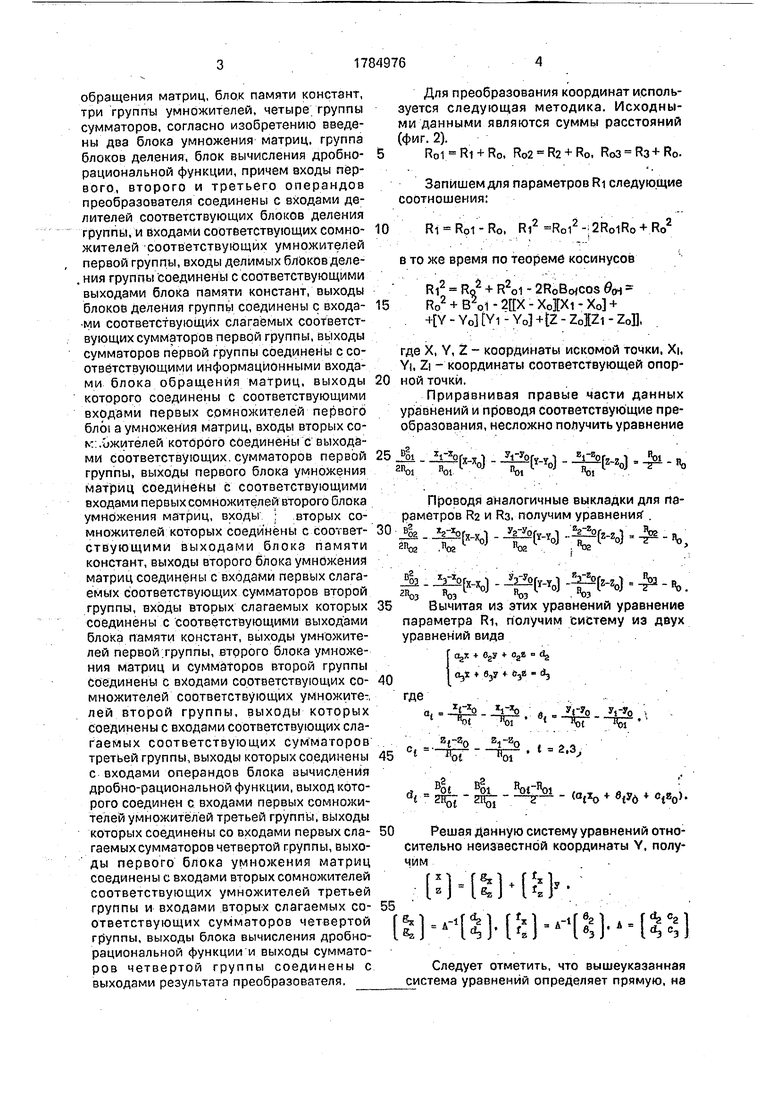
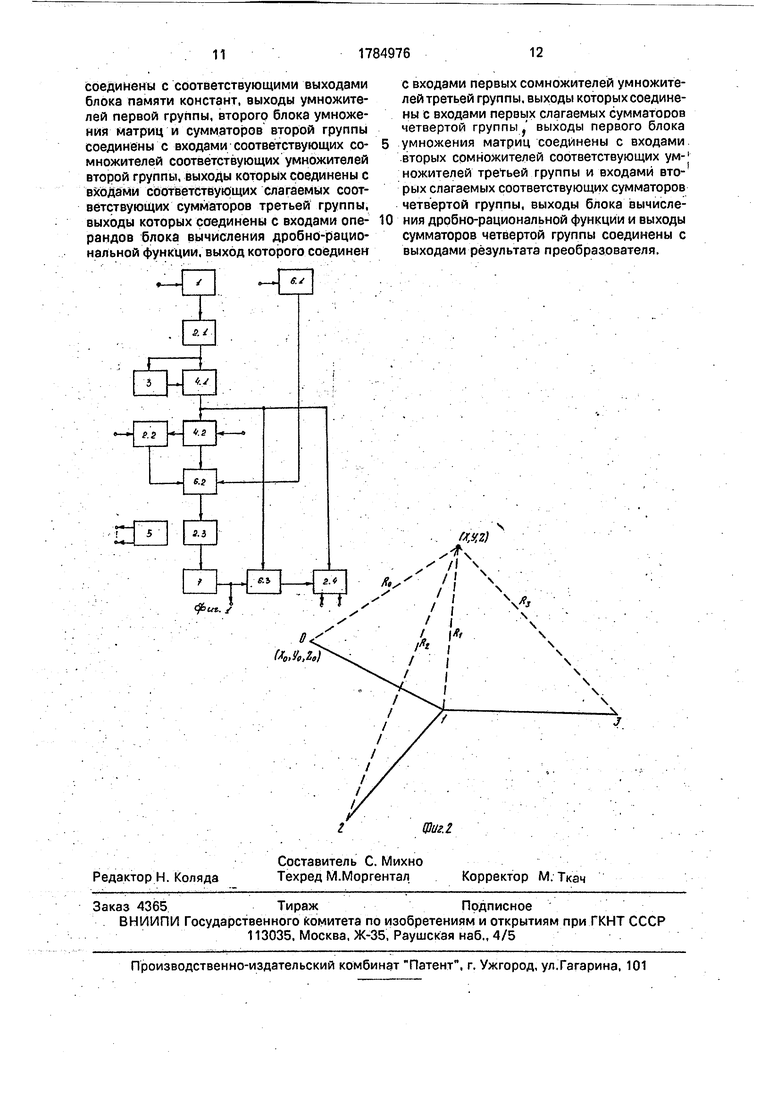
Для преобразования координат используется следующая методика. Исходными данными являются суммы расстояний (фиг. 2). Roi Ri + Ro, Ro2 R2 + Ro, Ro3 Ra+ Ro.
Запишем для параметров Ri следующие соотношения:
Ri R0i-Ro, Ri2 Roi2-;2R0iRo + Ro2 в то же время по теореме косинусов
Ri2 Ro2 + R201 - 2R0Bo cos - R02 + B201 - - X0pl - X0 +
- Yo Yi - Y0J +tZ - ZoJZi - ZoB,
где X, Y, Z - координаты искомой точки, Xi, YI, Zi - координаты соответствующей опор- ной точки.
Приравнивая правые части данных уравнений и проводя соответствующие преобразования, несложно получить уравнение
м ..-%, , УгУр|у 1 ,. ч ROI n и, ТГИо - - -р - «о
noi %
«to
«to
Проводя аналогичные выкладки для параметров Ra и RS, получим уравнения
).-ч
.
35 Вычитая из этих уравнений уравнение параметра RI, получим систему из двух уравнений вида
40
сус + оЈу + ога { цх + 83у f u3e dj
где
BJ-BO
в -
. е 2,з,
«i-Sfe-Sfe-5 -).
50 Решая данную систему уравнений относительно неизвестной координаты Y, получим
55
I .HSHttг в, v л г fx 1 tr вг г л, оа 1
Кг4 W Кг
Следует отметить, что вышеуказанная стема уравнений определяет прямую, на
которой лежит искомая точка. Прямая описывается уравнениями вида
fxfz
т.е. прямая определяется точкой (дх, О, gz) и направляющим вектором (fx, I. fz).
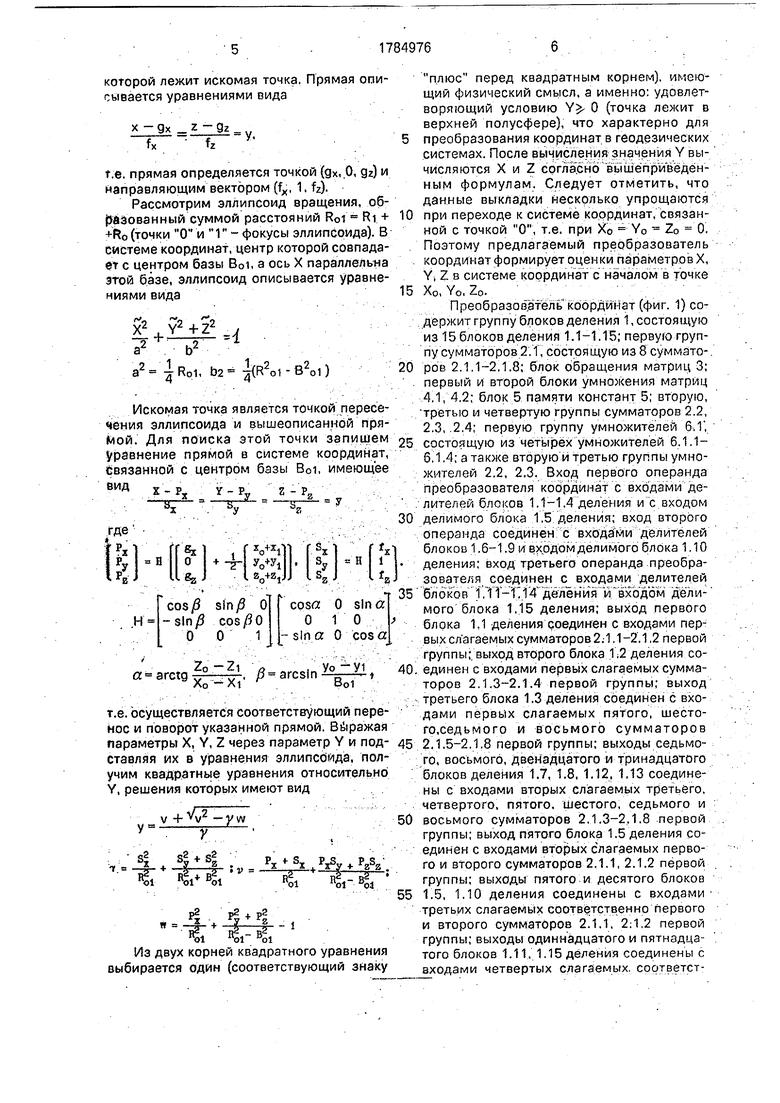
Рассмотрим эллипсоид вращения, образованный суммой расстояний R01 Ri + Ю +Ro (точки О и 1 - фокусы эллипсоида). В системе координат, центр которой совпадает с центром базы B0i, а ось X параллельна этой базе, эллипсоид описывается уравнениями вида15
: +
а2
, , Y2 + Z2
i
Rol, Ь2 (R2o1-B2ol)
Искомая точка является точкой пересечения эллипсоида и вышеописанной прямой. Для поиска этой точки запишем Уравнение прямой в системе координат, связанной с центром базы Boi. имеющее вид
Х-Р,
У
где
+ Vzi
cos/J sin/ О -sln/3
О
cosa
О - sin a
в arcsln
Уо У1 В01
т.е. осуществляется соответствующий перенос и поворот указанной прямой. Выражая параметры X, Y, Z через параметр У и под- ставляя их в уравнения эллипсоида, получим квадратные уравнения относительно Y, решения которых имеют вид
у -yw
sЈ + s
Д- i,..
ж г
55
iS + pS
-а- у -1
ж
Из двух корней квадратного уравнения выбирается один (соответствующий знаку
5
Ю15
20
25
30
35
40
45
50
55
плюс перед квадратным корнем), имеющий физический смысл, а именно: удовлетворяющий условию Y 0 (точка лежит в верхней полусфере), что характерно для преобразования координат в геодезических системах. После вычисления значения Y вычисляются X и Z согласно вышеприведенным формулам. Следует отметить, что данные выкладки несколько упрощаются при переходе к системе координат, связанной с точкой О, т.е. при Х0 Y0 - Z0 0. Поэтому предлагаемый преобразователь координат формирует оценки парамет ров X, Y, Z в системе координат с началом в точке
Хо, YO, ZQ.
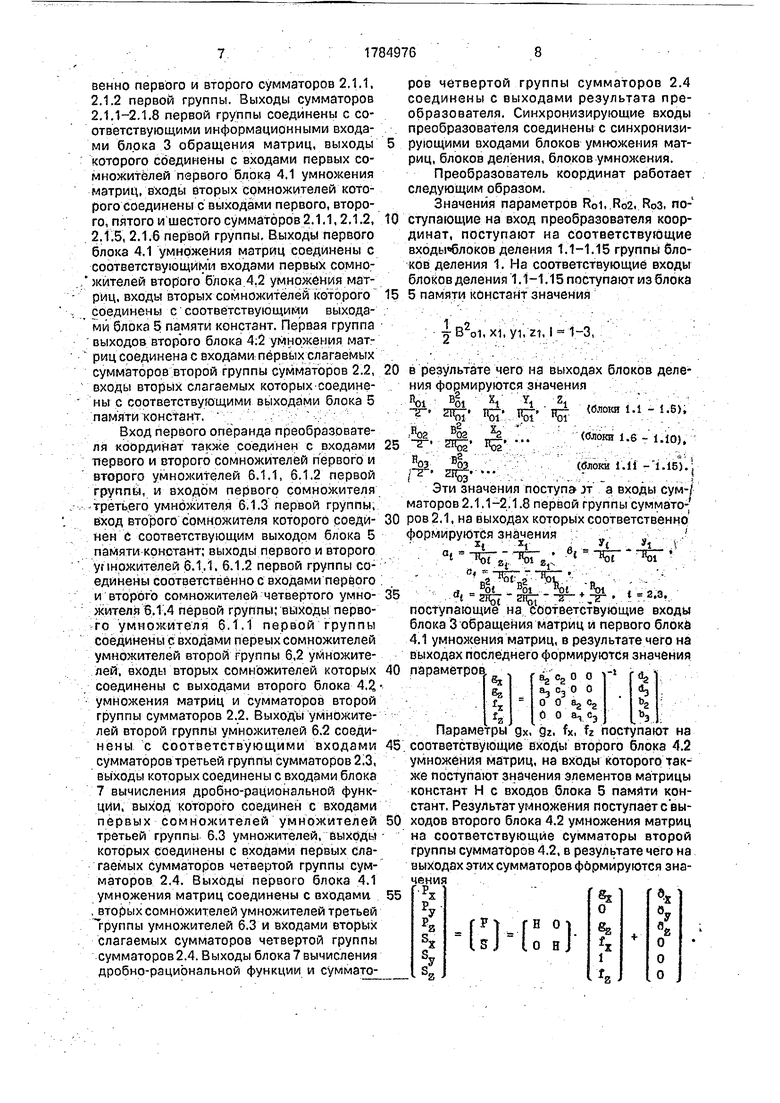
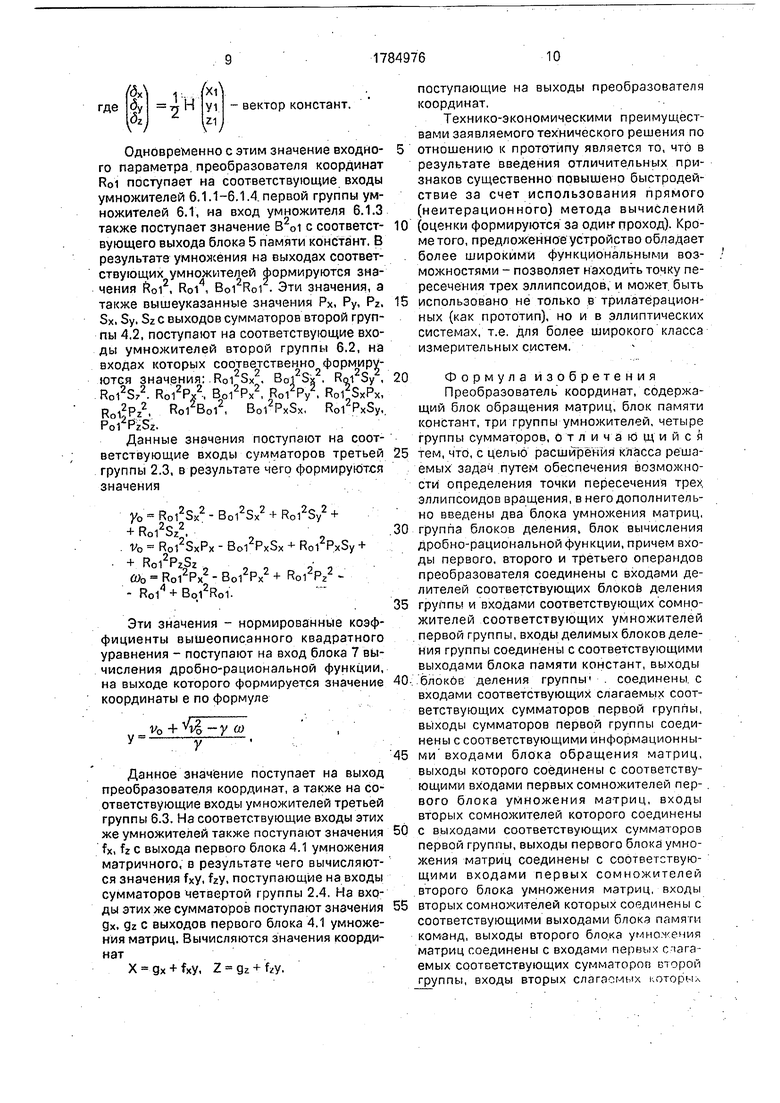
Преобразователь координат (фиг. 1) содержит группу блоков деления 1, состоящую из 15 блоков деления 1.1-1.15; первую группу сумматоров 2.1, состоящую из 8 сумматоров 2 1 1-2.1.8; блок обращения матриц 3; первый и второй блоки умножения матриц 4.1, 4,2; блок 5 памяти констант 5; вторую, третью и четвертую группы сумматоров 2 2, 2.3, 2.4; первую группу умножителей 6.1, состоящую из четырех умножителей 6.1.1- 6.1.4; а также вторую и третью группы умножителей 2.2, 2.3. Вход первого операнда преобразователя координат с входами делителей блоков 1.1-1.4 деления и с входом делимого блока 1.5 деления; вход второго операнда соединен с входами делителей блоков 1.6-1.9 и входом делимого блока 1 10 деления; вход третьего операнда преобразователя соединен с входами делителей блоков 1.11-1Т14 деления и входом делимого блока 1.15 деления; выход первого блока 1.1 деления соединен с входами первых слагаемых сумматоров 2.1.1-2.1,2 первой группы; выход второго блока 1.2 деления соединен с входами первых слагаемых сумматоров 2.1.3-2.1.4 первой группы; выход третьего блока 1.3 деления соединен с входами первых слагаемых пятого, шесто- го.седьмого и восьмого сумматоров 2.1.5-2.1.8 первой группы; выходы седьмого, восьмого, двенадцатого и тринадцатого блоков деления 1.7, 1.8, 1.12, 1,13 соединены с входами вторых слагаемых третьего, четвертого, пятого, шестого, седьмого и восьмого сумматоров 2.1.3-2.1.8 первой группы; выход пятого блока 1.5 деления соединен с входами вторых слагаемых первого и второго сумматоров 2.1.1, 2.1.2 первой группы; выходы пятого и десятого блоков 1.5, 1.10 деления соединены с входами третьих слагаемых соответственно первого и второго сумматоров 2.1.1, 2.1 2 первой группы; выходы одиннадцатого и пятнадцатого блоков 1.11, 1.15 деления соединены с входами четвертых слагаемых соответственно первого и второго сумматоров 2.1.1, 2.1.2 первой группы. Выходы сумматоров 2.1.1-2.1.8 первой группы соединены с соответствующими информационными входами блока 3 обращения матриц, выходы которого соединены с входами первых сомножителей первого блока 4.1 умножения матриц, входы вторых сомножителей которого соединены с выходами первого, второго, пятого и шестого сумматоров 2.1.1,2.1.2, 2.1.5, 2.1.6 первой группы. Выходы первого блока 4,1 умножения матриц соединены с соответствующими входами первых сомножителей второго блока 4.2 умножения матриц, входы вторых сомножителей которого соединены с соответствующими выходами блока 5 памяти констант. Первая группа выходов второго блока 4.2 умножения матриц соединена с входами первых слагаемых сумматоров второй группы сумматоров 2.2, входы вторых слагаемых которых соединены с соответствующими выходами блока 5 памяти констант.
Вход первого операнда преобразователя координат также соединен с входами первого и второго сомножителей первого и второго умножителей 6.1.1, 6.1,2 первой группы, и входом первого сомножителя третьего умножителя 6.1.3 первой группы, вход второго сомножителя которого соединен с соответствующим выходом блока 5 памяти констант; выходы первого и второго умножителей 6.1.1. 6.1.2 первой группы соединены соответственно с входами первого и второго сомножителей четвертого умножителя 6.1.4 первой группы; выходы первого умножителя 6.1.1 первой группы соединены с входами переых сомножителей умножителей второй группы 6,2 умножителей, входы вторых сомножителей которых соединены с выходами второго блока 4,2, умножения матриц и сумматоров второй группы сумматоров 2.2. Выходы умножителей второй группы умножителей 6.2 соединены с соответствующими входами сумматоров третьей группы сумматоров 2.3, выходы которых соединены с входами блока 7 вычисления дробно-рациональной функции, выход которого соединен с входами первых сомножителей умножителей третьей группы 6.3 умножителей, выходы которых соединены с входами первых слагаемых сумматоров четвертой группы сумматоров 2,4. Выходы первого блока 4.1 умножения матриц соединены с входами, .вторых сомножителей умножителей третьей группы умножителей 6.3 и входами вторых слагаемых сумматоров четвертой группы сумматоров2.4. Выходы блока 7 вычисления дробно-рациональной функции и сумматоров четвертой группы сумматоров 2.4 соединены с выходами результата преобразователя. Синхронизирующие входы преобразователя соединены с синхронизирующими входами блоков умножения матриц, блоков деления, блоков умножения.
Преобразователь координат работает следующим образом.
Значения параметров R01, Ro2, Ro3, поступающие на вход преобразователя координат, поступают на соответствующие входы«блоков деления 1.1-1.15 группы блоков деления 1. На соответствующие входы блоков деления 1.1-1,15 поступают из блока
5 памяти констант значения
0
5
5
jB2oi,xi,yi.zi, 1 1-3,
в результате чего на выходах блоков деления формируются значения
Be. п
-Г 2П
Я02J 02
R03В03
,
ч
Ј
из
Ј
{блоки 1.1 - 1.6), (блоки 1.6 - 1.10),
(блоки 1.11 .16).
Эти значения поступз- зт а входы сум-| маторов2.1.1-2.1.8 первой группы суммато- 0 ров 2.1, на выходах которых соответственно формируются значения
з, -тг- 1 оГ
С s- -.ft
oi
2(
5Г.
У( У
НоТ оГ
e-3fe-36r-V. . поступающие на соответствующие входы блока 3 обращения матриц и первого блока 4.1 умножения матриц, в результате чего на выходах последнего формируются значения 0 параметров
Параметры gx, gz, fx, fz поступают на соответствующие входы второго блока 4,2 умножения матриц, на входы которого также поступают значения элементов матрицы констант Н с входов блока 5 памяти констант. Результат умножения поступает с вы- ходов второго блока 4.2 умножения матриц на соответствующие сумматоры второй группы сумматоров 4.2, в результате чего на выходах этих сумматоров формируются значения
1
sx
с.-ни
Jx I 1 (Xr
где -TJ H yi I - вектор констант, l л. I Z1 l
3Z
Одновременно с этим значение входного параметра преобразователя координат R01 поступает на соответствующие входы умножителей 6.1.1-6.1.4 первой группы умножителей 6.1, на вход умножителя 6.1.3 также поступает значение В201 с соответствующего выхода блока 5 памяти констант. В результате умножения на выходах соответствующих умножителей формируются значения R012, Roi4, B0i2Roi . Эти значения, а также вышеуказанные значения Рх, Ру, PZ. Sx, Sy. Sz с выходов сумматоров второй группы 4.2, поступают на соответствующие входы умножителей второй группы 6.2, на входах которых соответственно формируются значения: Roi2Sx2. B0i2Sx2, Roi2Sy , Roi2S72. RoiW, Boi2Px2, RoiW. RoCSxPx,
x - Ro12B012
Bo12PxSx, Ro12PxSy,
Ro12Pz2, Po/PzSz.
Данные значения поступают на соответствующие входы сумматоров третьей группы 2.3, в результате чего формируются значения
Уо Roi2Sx2 - B0i2Sx2 + Roi2Sy2 + + Roi2Sz2.
V0 RolSxPx - B01 PxSx + Ro12PxSy +
+ Roi2PzSz.
Oh Ro12Px2 - B012Px2 + Ro12Pz2 - - Rol + Boi2Roi.
Эти значения - нормированные коэффициенты вышеописанного квадратного уравнения - поступают на вход блока 7 вычисления дробно-рациональной функции, на выходе которого формируется значение координаты е по формуле
V0
+ 4
у а)
Данное значение поступает на выход преобразователя координат, а также на соответствующие входы умножителей третьей группы 6.3. На соответствующие входы этих же умножителей также поступают значения fx, fz с выхода первого блока 4.1 умножения матричного, в результате чего вычисляются значения fxy, fzy, поступающие на входы сумматоров четвертой группы 2.4, На входы этих же сумматоров поступают значения Qx, Qz с выходов первого блока 4.1 умножения матриц. Вычисляются значения координат
X gx + , 2 дг + тгу,
поступающие на выходы преобразователя координат.
Технико-экономическими преимуществами заявляемого технического решения по
5 отношению к прототипу является то, что в результате введения отличительных признаков существенно повышено быстродействие за счет использования прямого (неитерационного) метода вычислений
10 (оценки формируются за один- проход). Кроме того, предложенное устройство обладает более широкими функциональными возможностями - позволяет находить точку пересечения трех эллипсоидов, и может быть
15 использовано не только в трилатерацион- ных (как прототип), но и в эллиптических системах, т.е. для более широкого класса измерительных систем.
0 Формула изобретения
Преобразователь координат, содержащий блок обращения матриц, блок памяти констант, три группы умножителей, четыре группы сумматоров, отличающийся
5 тем, что, с целью расширения класса решаемых задач путем обеспечения возможности определения точки пересечения трех, эллипсоидов вращения, в него дополнительно введены два блока умножения матриц,
0 группа блоков деления, блок вычисления дробно-рациональной функции, причем входы первого, второго и третьего операндов преобразователя соединены с входами делителей соответствующих блоков деления
5 группы и входами соответствующих сомножителей соответствующих умножителей первой группы, входы делимых блоков деления группы соединены с соответствующими выходами блока памяти констант, выходы
0 блоков деления группы1 соединены с входами соответствующих слагаемых соответствующих сумматоров первой группы, выходы сумматоров первой группы соединены с соответствующими информационны5 ми входами блока обращения матриц, выходы которого соединены с соответствующими входами первых сомножителей первого блока умножения матриц, входы вторых сомножителей которого соединены
0 с выходами соответствующих сумматоров первой группы, выходы первого блока умножения матриц соединены с соответствующими входами первых сомножителей второго блока умножения матриц, входы
5 вторых сомножителей которых соединены с соответствующими выходами блока памяти команд, выходы второго блока умножения матриц соединены с входами первых слагаемых соответствующих сумматорогз второй группы, входы вторых слагаемых которнл
соединены с соответствующими выходами блока памяти констант, выходы умножителей первой группы, второго блока умножения матриц и сумматоров второй группы соединены с входами соответствующих сомножителей соответствующих умножителей второй группы, выходы которых соединены с входами соответствующих слагаемых соответствующих сумматоров третьей группы, выходы которых соединены с входами операндов блока вычисления дробно-рациональной функции, выход которого соединен
с входами первых сомножителей умножителей третьей группы, выходы которых соединены с входами первых слагаемых сумматоров четвертой группы / выходы первого блока
умножения матриц соединены с входами вторых сомножителей соответствующих ум- ножителей третьей группы и входами вто-1 рых слагаемых соответствующих сумматоров четвертой группы, выходы блока вычисления дробно-рациональной функции и выходы сумматоров четвертой группы соединены с выходами результата преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования координат | 1990 |
|
SU1800455A1 |
| Устройство для выполнения операций над матрицами | 1990 |
|
SU1741153A1 |
| МАТРИЧНЫЙ СПЕЦПРОЦЕССОР | 1994 |
|
RU2079879C1 |
| Устройство для вычислений в конечных полях | 1989 |
|
SU1695299A1 |
| Устройство для вычисления функции табличным методом | 1986 |
|
SU1383337A1 |
| Цифровое множительно-делительное устройство | 1990 |
|
SU1730623A1 |
| Вычислительное устройство | 1989 |
|
SU1691837A1 |
| Устройство для деления | 1990 |
|
SU1711149A1 |
| Устройство для умножения чисел | 1990 |
|
SU1714595A1 |
| Устройство для умножения чисел в модулярной системе счисления | 1986 |
|
SU1352483A1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в геодезических системах для преобразования пространственных координат. Целью изобретения является расширение класса решаемых задач за счёт возможности определения точки пересечения трех эллипсоидов вращения. Устройство содержит блок обращения матриц, блок памлти констант, три группы умножителей, четыре группы сумматоров, два блока умножения матриц, группу блоков деления, блок вычитания дробно-рациональной функции 2 ил.
Щиг2
| Устройство преобразования координат | 1987 |
|
SU1472902A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Преобразователь координат | 1988 |
|
SU1513445A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
