Устройство относится к области измерительной техники и может быть использовано в автоматических и автоматизированных системах измерительного контроля.
Известно устройство оценки состояния и идентификации параметров моделей динамических систем, которое предназначено для оценки состояния и идентификации параметров моделей динамических систем [1]. Известно устройство идентификации параметров акселерометра, которое используется для коррекции динамической погрешности датчиков ускорения в условиях параметрической неопределенности [2]. Недостатком заявленных устройств является возможность их применения только для дискретных систем, в то время как передаточная характеристика большинство датчиков имеет непрерывный вид.
Наиболее близким по технической сущности к заявленному изобретению можно отнести устройство идентификации параметров динамических звеньев информационно-управляющих систем, которое используется для уточнения динамики модели конкретного динамического звена в реальном масштабе времени [3].
Цель изобретения - увеличить точность оценки параметров модели MEMS-акселерометра.
Указанный технический результат в устройстве идентификации параметров передаточной характеристики MEMS-акселерометра достигается за счет реализации алгоритма многопараметрической вариационной идентификации динамических систем для реальных моделей MEMS-акселерометров, описываемых дифференциальными уравнениями второго порядка и позволяет проводить оценку параметров их передаточной характеристики.
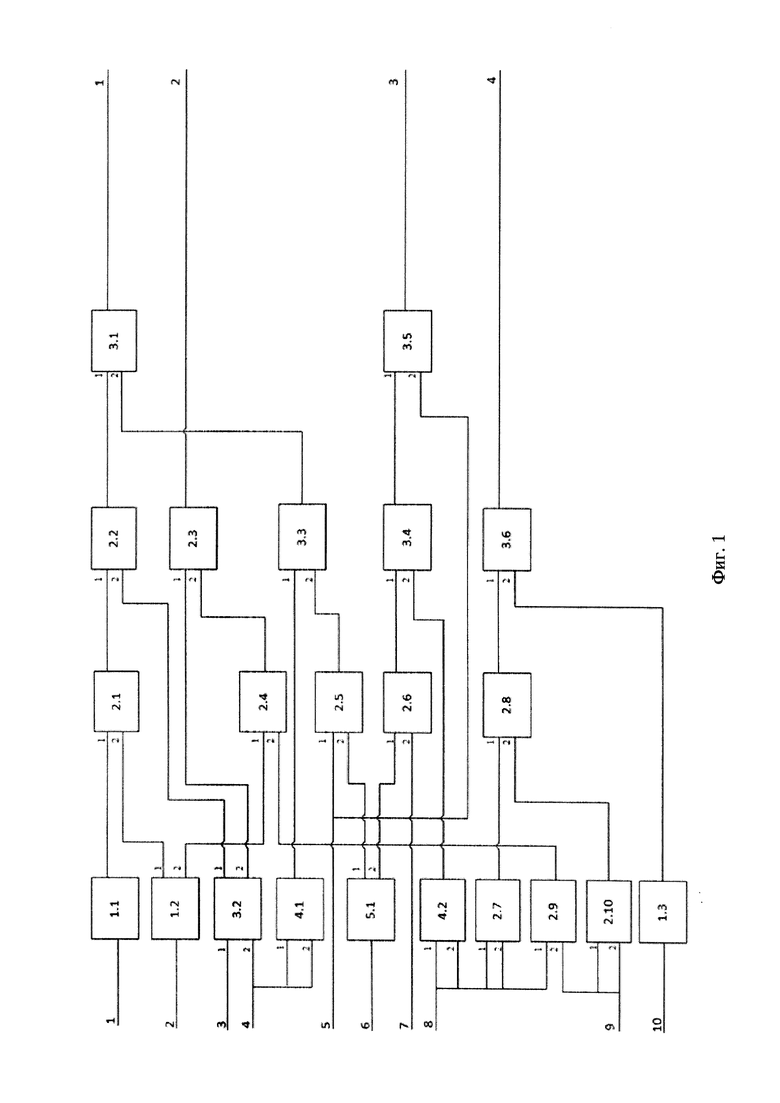
Сущность изобретения поясняется чертежом, где на фиг. 1 представлены следующие блоки:
1.1 - первый блок формирования деления;
1.2 - второй блок формирования деления;
1.3 - третий блок формирования деления;
2.1 - первый блок формирования умножения;
2.2 - второй блок формирования умножения;
2.3 - третий блок формирования умножения;
2.4 - четвертый блок формирования умножения;
2.5 - пятый блок формирования умножения;
2.6 - шестой блок формирования умножения;
2.7 - седьмой блок формирования умножения;
2.8 - восьмой блок формирования умножения;
2.9 - девятый блок формирования умножения;
2.10 - десятый блок формирования умножения;
3.1 - первый блок формирования разности;
3.2 - второй блок формирования разности;
3.3 - третий блок формирования разности;
3.4 - четвертый блок формирования разности;
3.5 - пятый блок формирования разности;
3.6 - шестой блок формирования разности;
4.1 - первый блок формирования суммы;
4.2 - второй блок формирования суммы;
5.1 - первый блок инверсии.
При этом вход первого блока формирования деления является первым входом устройства; вход второго блока формирования деления является вторым входом устройства; первый вход второго блока формирования разности является третьим входом устройства; второй вход второго блока формирования разности, первый и второй вход первого блока формирования суммы являются четвертым входом устройства; первый вход пятого блока формирования умножения, второй вход пятого блока формирования разности являются пятым входом устройства; вход первого блока формирования инверсии является шестым входом устройства; второй вход шестого блока формирования умножения является седьмым входом устройства; первый и второй вход второго блока формирования суммы, первый и второй вход седьмого блока формирования умножения, первый вход девятого блока формирования умножения являются восьмым входом устройства; второй вход девятого блока формирования умножения, первый и второй вход десятого блока умножения являются девятым входом устройства; вход третьего блока формирования деления является десятым входом устройства;
выход первого блока формирования деления является первым входом первого блока формирования умножения; первый выход второго блока формирования деления является вторым входом первого блока формирования умножения, выход первого блока формирования умножения является первым входом второго блока формирования умножения; второй выход второго блока формирования деления является первым входом четвертого блока формирования умножения; первый выход второго блока формирования разности является вторым входом второго блока формирования умножения; выход второго блока формирования умножения является первым входом первого блока формирования разности; второй выход второго блока формирования разности является первым входом третьего блока формирования умножения; выход первого блока формирования суммы является первым входом третьего блока формирования разности; первый выход первого блока формирования инверсии является вторым входом пятого блока формирования умножения; выход пятого блока формирования умножения является вторым входом третьего блока формирования разности; выход третьего блока формирования разности является вторым входом первого блока формирования разности; выход первого блока формирования разности является первым выходом устройства; второй выход первого блока формирования инверсии является первым входом шестого блока формирования умножения; выход шестого блока формирования умножения является первым входом четвертого блока формирования разности; выход второго блока формирования суммы является вторым входом четвертого блока формирования разности; выход четвертого блока формирования разности является первым входом пятого блока формирования разности; выход пятого блока формирования разности является третьим выходом устройства; выход седьмого блока формирования умножения является первым входом восьмого блока формирования умножения; выход девятого блока формирования умножения является вторым входом четвертого блока формирования умножения; выход четвертого блока формирования умножения является вторым входом третьего блока формирования умножения; выход третьего блока формирования умножения является вторым выходом устройства; выход десятого блока формирования умножения является вторым входом восьмого блока формирования умножения; выход восьмого блока формирования умножения является первым входом шестого блока формирования разности; выход третьего блока формирования деления является вторым входом шестого блока формирования разности; выход шестого блока формирования разности является четвертым выходом устройства.
Пояснить работу устройства позволяют следующие математические выкладки.
Рассмотрим задачу оценки идентификации коэффициента z0=0,5 сопротивления MEMS-акселерометра маятникового типа, работа которого описывается дифференциальным уравнением второго порядка [5].

где a(t) - ускорение,
m - инерционная масса,
x(t) - координата перемещения т,
z1=2 - коэффициент жесткости,
Подобными уравнениями описывается работа большинства датчиков [5, 6].
Выходной сигнал датчика описывается выражением

здесь w(t) - белый гауссовский шум со средним квадратическим отклонением σ=0,15
Поиск действительного значения параметра коэффициента демпфирования колебаний достигается условием минимума целевого функционала

Для математической формализации задачи (1)-(3) расширим пространство состояний

где 
Уравнение наблюдения примет вид

где
Тогда алгоритм параметрической идентификации [4] определяется следующей системой уравнений
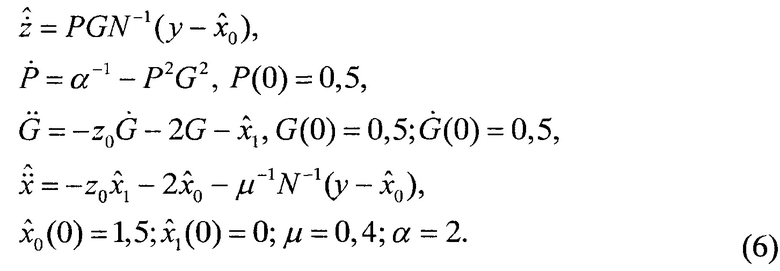
где Ν - матрица односторонней спектральной плотности шума наблюдения; G - матрица чувствительности системы, Ρ - ковариационная матрица; α, μ - неопределенный множитель Лагранжа.
Устройство работает следующим образом. В исходном состоянии на входы устройства поступают начальные данные:
μ - на вход блока 1.1;
N - на вход блока 1.2;
у - на первый вход блока 3.2;
 - на второй вход блока 3.2, на первый и второй входы блока 4.1;
- на второй вход блока 3.2, на первый и второй входы блока 4.1;
 - на первый вход блока 2.5, на второй вход блока 3.5;
- на первый вход блока 2.5, на второй вход блока 3.5;
z0 - на вход блока 5.1;
 - на второй вход блока 2.6;
- на второй вход блока 2.6;
G - на первый и второй входы блоков 4.2, 2.7, на первый вход блока 2.9;
Р - на второй вход блока 2.9, на первый и второй входы блока 2.10;
α - на вход блока 1.3.
На выходе блока 1.1 формируется значение μ-1 и поступает на первый вход блока 2.1; на первом выходе блока 1.2 формируется значение N-1 и поступает на второй вход блока 2.1, на выходе которого формируется значение данных μ-1Ν-1 и поступает на первый вход блока 2.2; на втором выходе блока 1.2 формируется значение Ν-1 и поступает на первый вход блока 2.4; на первом выходе блока 3.2 формируется значение  и поступает на второй вход блока 2.2, на выходе которого формируется значение
и поступает на второй вход блока 2.2, на выходе которого формируется значение  и поступает на первый вход блока 3.1; на втором выходе блока 3.2 формируется значение
и поступает на первый вход блока 3.1; на втором выходе блока 3.2 формируется значение  и поступает на первый вход блока 2.3; на выходе блока 4.1 формируется значение
и поступает на первый вход блока 2.3; на выходе блока 4.1 формируется значение  и поступает на первый вход блока 3.3; на первом выходе блока 5.1 формируется значение - z0 и поступает на второй вход блока 2.5, в результате чего на выходе блока 2.5 формируется значение -
и поступает на первый вход блока 3.3; на первом выходе блока 5.1 формируется значение - z0 и поступает на второй вход блока 2.5, в результате чего на выходе блока 2.5 формируется значение -  и поступает на второй вход блока 3.3, на выходе блока 3.3 формируется значение -
и поступает на второй вход блока 3.3, на выходе блока 3.3 формируется значение -  и поступает на второй вход блока 3.1, на выходе блока 3.1 формируется значение -
и поступает на второй вход блока 3.1, на выходе блока 3.1 формируется значение -  которое снимается с первого выхода устройства и определяет параметр
которое снимается с первого выхода устройства и определяет параметр 
Значение - z0 со второго выхода блока 5.1 поступает на первый вход блока 2.6, а значение  поступает на второй вход блока 2.6, в результате чего на выходе блока 2.6 формируется значение -
поступает на второй вход блока 2.6, в результате чего на выходе блока 2.6 формируется значение -  и поступает на первый вход блока 3.4; на выходе блока 4.2 формируется значение 2G и поступает на второй вход блока 3.4, на выходе блока 3.4 формируется значение
и поступает на первый вход блока 3.4; на выходе блока 4.2 формируется значение 2G и поступает на второй вход блока 3.4, на выходе блока 3.4 формируется значение  и поступает на первый вход блока 3.5; на выходе блока 3.5 формируется значение -
и поступает на первый вход блока 3.5; на выходе блока 3.5 формируется значение -  которое снимается с третьего выхода устройства и определяет параметр
которое снимается с третьего выхода устройства и определяет параметр 
На выходе блока 2.7 формируется G2 и поступает на первый вход блока 2.8; на выходе блока 2.9 формируется значение PG, которое поступает на второй вход блока 2.4, на выходе блока 2.4 формируется значение PGN-1 и поступает на второй вход блока 2.3, на выходе которого формируется значение  которое снимается со второго выхода устройства и определяет идентифицируемый параметр
которое снимается со второго выхода устройства и определяет идентифицируемый параметр  передаточной характеристики MEMS-акселерометра.
передаточной характеристики MEMS-акселерометра.
На выходе блока 2.10 формируется значение P2 и поступает на второй вход блока 2.8, на выходе блока 2.8 формируется значение P2G2 и поступает на первый вход блока 3.6; на выходе блока 1.3 формируется значение α-1 и поступает на второй вход блока 3.6, на выходе которого формируется значение α-1-P2G2, которое снимается с четвертого выхода устройства и определяет параметр 
ЛИТЕРАТУРА
1. RU 2653939, от 15.05.2018 г.
2. RU 2628279, от 15.08.2017 г.
3. RU 2632681, от 09.10.2017 г.
4. Андрашитов Д.С., Костоглотов А.А., Лазаренко С.В. Регуляризированный алгоритм многопараметрической вариационной идентификации динамических систем // Сервис в России и за рубежом, №8(27) http://www.rguts.ru/electronic_journal/number27/contents.
5. Датчики теплофизических и механических параметров: Справочник в 3 томах. Т1 / под общ. ред. Ю.Н. Коптева - М.: ИПРЖР, 1998, - 458 с.
6. Павлов Д.В., Лукин К.Г., Петров М.Н. Разработка математической модели MEMS-акселерометров // Вестник Новгородского государственного университета, №8(91), 2015 г., - С. 22-25.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство идентификации параметров акселерометра | 2014 |
|
RU2628279C2 |
| Устройство оценки параметров возмущенных процессов с использованием максимума обобщенной мощности | 2019 |
|
RU2713875C1 |
| Устройство идентификации параметров динамических звеньев информационно-управляющих систем | 2014 |
|
RU2632681C2 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ ДИНАМИЧЕСКИХ СИСТЕМ НА ОСНОВЕ ВАРИАЦИОННЫХ ПРИНЦИПОВ | 2011 |
|
RU2464615C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |
| Устройство формирования функции преобразования датчика давления с учетом воздействия дополнительных факторов | 2022 |
|
RU2797374C1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| ЦИФРОВОЕ УСТРОЙСТВО ОЦЕНКИ ПАРАМЕТРОВ ЛЧМ-СИГНАЛОВ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2602391C1 |
| Устройство для адаптивной идентификации объекта | 1985 |
|
SU1305633A2 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
Устройство относится к области измерительной техники и может быть использовано в автоматических и автоматизированных системах измерительного контроля. Устройство содержит: первый, второй и третий блоки формирования деления; первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый и десятый блоки формирования умножения; первый, второй, третий, четвертый, пятый и шестой блоки формирования разности; первый и второй блоки формирования суммы; первый блок формирования инверсии. В устройстве идентификации параметров передаточной характеристики MEMS-акселерометра реализуется алгоритм многопараметрической вариационной идентификации динамических систем для реальных моделей MEMS-акселерометров, описываемых дифференциальными уравнениями второго порядка, что позволяет проводить оценку параметров их передаточной характеристики. Технический результат - увеличение точности оценки параметров модели MEMS-акселерометра. 1 ил.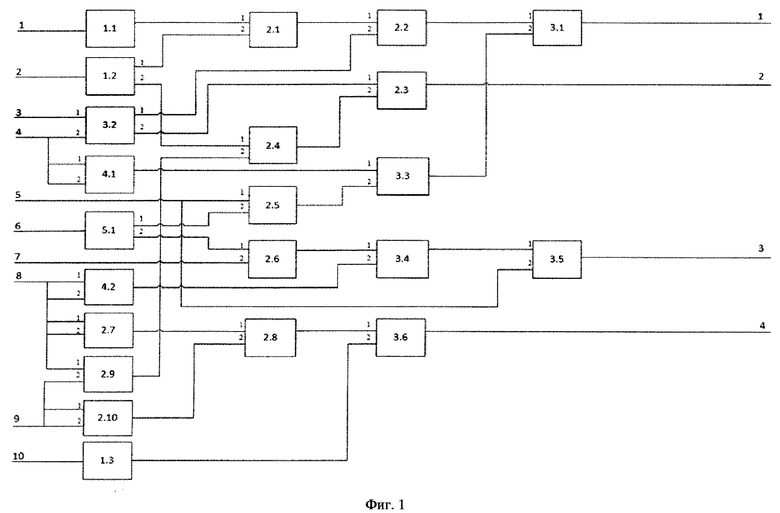
Устройство идентификации параметров передаточной характеристики MEMS-акселерометра, содержащее первый, второй, третий и четвертый блоки формирования разности; первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый и десятый блоки формирования умножения; первый блок формирования суммы, при этом первый вход второго блока формирования деления является третьим входом устройства; второй вход второго блока формирования деления, первый и второй входы первого блока формирования суммы являются четвертым входом устройства; первый вход пятого блока формирования умножения является пятым входом устройства; второй вход шестого блока формирования умножения является седьмым входом устройства; первый и второй входы седьмого блока формирования умножения, первый вход девятого блока формирования умножения является восьмым входом устройства; второй вход девятого блока формирования умножения, первый и второй вход десятого блока умножения являются девятым входом устройства; выход первого блока формирования разности является первым выходом устройства; выход третьего блока формирования умножения является вторым выходом устройства, отличающееся тем, что в него дополнительно введены первый, второй и третий блоки формирования деления, где вход первого блока деления, вход второго блока деления, вход третьего блока деления являются первым, вторым и десятым входом устройства соответственно; второй блок формирования суммы, первый и второй входы которого входят в восьмой вход устройства, а выход которого является вторым входом четвертого блока формирования разности; первый блок формирования инверсии, вход которого является шестым входом устройства, первый выход блока является вторым входом пятого блока формирования умножения, а второй выход является первым входом шестого блока формирования умножения.
| Устройство идентификации параметров динамических звеньев информационно-управляющих систем | 2014 |
|
RU2632681C2 |
| Устройство идентификации параметров акселерометра | 2014 |
|
RU2628279C2 |
| Устройство оценки состояния и идентификации параметров моделей динамических систем | 2016 |
|
RU2653939C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ ДИНАМИЧЕСКИХ СИСТЕМ НА ОСНОВЕ ВАРИАЦИОННЫХ ПРИНЦИПОВ | 2011 |
|
RU2464615C1 |
| Идентификатор параметров динамической системы второго порядка | 1981 |
|
SU1038922A1 |
| Система идентификации параметров объекта | 1980 |
|
SU949635A1 |
| Козырек к заднему борту грузового автомобиля | 1961 |
|
SU150762A1 |
| US 6625569 B2, 23.09.2003. | |||

