Изобретение относится к гидроакустической технике, в частности к рыбопоисковым эхолотам (РЭЛ), предназначенным для использования в условиях рыбалки с целью обнаружения рыбы и получения сведений о рельефе дна.
Обеспечение высокой эффективности современных рыбопоисковых гидроакустических средств (ГАС) является весьма актуальной задачей.
В настоящее время создана широкая номенклатура ГАС, используемых в рыболовном промысле. Продукция же, ориентированная на рыболовов-любителей, представлена в основном моделями однолучевых эхолотов (ОЭ) и гидролокаторов бокового обзора (ГБО), выпускаемых компаниями Raymarine (www.raymarine.com), Humminbird (http://www.humminbird.com), Garmin Ltd. (http://www.garmin.com), Lowrance Electronics (http://www.lowrance.com), Furuno Electric Co., Ltd. (http://www.furuno.com), Simrad Yachting (http://www.simrad-yachting.com), Deeper (http://www.deepersonar.com).
Все перечисленные модели, несмотря на простоту конструкции, удобство в эксплуатации, компактность и дешевизну, тем не менее обладают недостатками: ОЭ не позволяют обнаруживать рыбу даже на небольшом удалении от места установки, а неподвижные ГБО - впереди и позади гидролокатора.
Наиболее близким к заявляемому изобретению по своему назначению, технической сущности и достигаемым результатам является беспроводной РЭЛ Lowrance FishHunter 3D компании Lowrance Electronics (http://www.lowrance.com).
Устройство-прототип содержит аппаратную часть, акустическую антенну и антенну радиосвязи (PC). Аппаратная часть образована генераторным устройством (ГУ), устройством предварительной обработки сигналов (УПОС), устройством управления (УУ), коммутатором приема-передачи (КПП) и источником электропитания, а акустическая антенна - пятью одинаковыми обратимыми акустическими блоками (АБ) направленного действия. АБ установлены на несущую конструкцию так, что характеристика направленности (ХН) первого АБ ориентирована вертикально вниз, а оси ХН дополнительных четырех АБ расположены попарно во взаимно перпендикулярных вертикальных плоскостях (ВП) и отклонены во внешние стороны от вертикали на некоторый угол. При этом первый выход УУ соединен с входом антенны PC, а второй выход - с входом ГУ, выход которого через КПП подключен к АБ. При этом вход УУ соединен с выходом УПОС, вход которого в свою очередь также через КПП подключен к АБ.
Устройство-прототип работает следующим образом.
Электрический сигнал, созданный ГУ, через КПП поступает к одному из АБ, преобразуется в акустический сигнал и излучается в сторону дна. Эхо-сигнал от рыбы принимается тем же АБ, преобразуется в электрический сигнал и через КПП поступает в УПОС. В нем принятый сигнал подвергается предварительной обработке и через УУ подается к антенне PC для передачи на смартфон рыбака, где осуществляется окончательная обработка принятого сигнала и отображение ее результатов и начинается новый цикл излучения-приема.
При этом устройство-прототип реализует шаговый обзор пространства путем переключения АБ в любой последовательности, что не позволяет наблюдать одновременно за всеми рыбами, находящимися в зоне действия устройства, и в конечном итоге приводит к снижению достоверности информации о подводной обстановке при количественной оценке рыб.
Задача изобретения состоит в повышении эффективности поиска рыб.
Технический результат использования изобретения заключается в обеспечении одновременного обзора пространства в широком секторе с высокой разрешающей способностью по углу.
Для достижения технического результата в беспроводной РЭЛ, содержащий аппаратную часть, акустическую антенну и антенну PC, в котором аппаратная часть содержит ГУ, УПОС, УУ и источник электропитания, а акустическая антенна - четыре одинаковых АБ, ориентированных так, что оси симметрии их рабочих секторов расположены попарно во взаимно перпендикулярных ВП и отклонены во внешние стороны от вертикали на некоторый угол, при этом первый выход УУ соединен с входом антенны PC, введены новые признаки, а именно:
- каждый из четырех АБ содержит один излучающий элемент и линейную антенную решетку из семи приемных элементов;
- аппаратная часть выполнена многоканальной, при этом входы излучающих элементов соединены с выходами ГУ, входы которого подключены ко второму, третьему, четвертому и пятому выходам УУ, а выходы приемных элементов антенных решеток соединены с входами УПОС;
- в аппаратную часть введено устройство формирования ХН (УФХН), входы которого подключены к выходам УПОС, а выход соединен с входом УУ.
Сущность изобретения поясняется фиг.1-8.
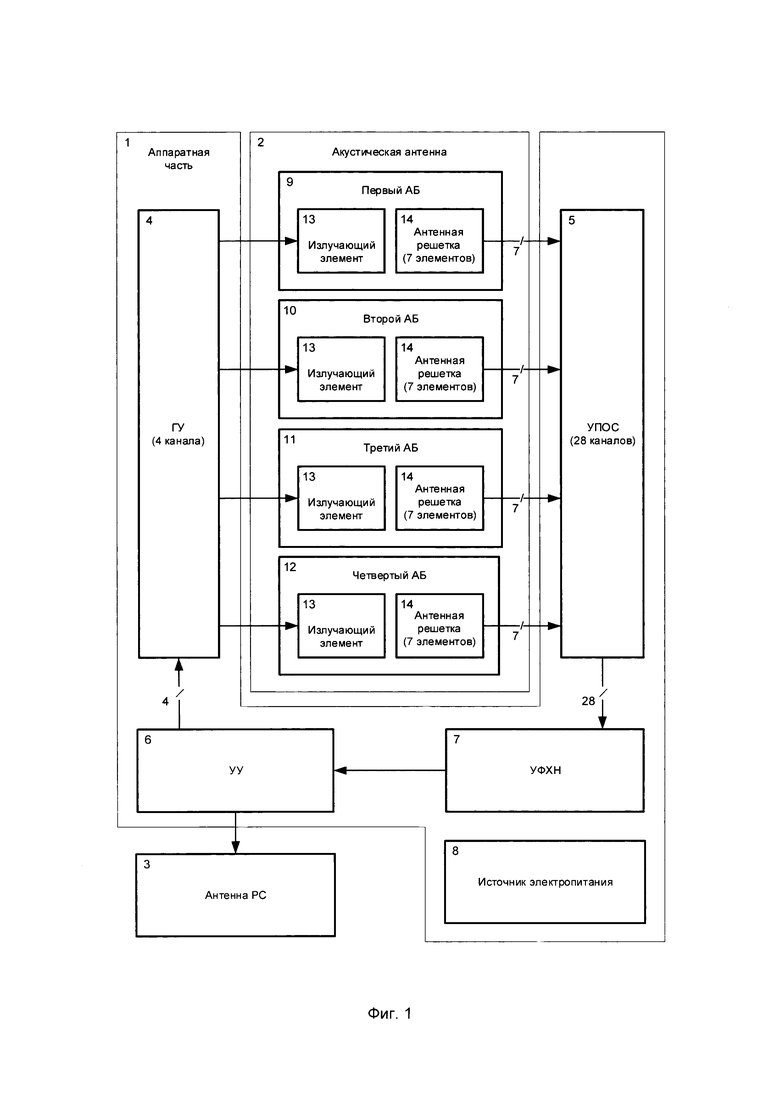
На фиг.1 изображена структурная схема заявляемого беспроводного РЭЛ, где 1 - аппаратная часть, 2 - акустическая антенна, 3 - антенна радиосвязи (PC), 4 - генераторное устройство (ГУ), 5 - устройство предварительной обработки сигналов (УПОС), 6 - устройство управления (УУ), 7 - устройство формирования характеристик направленности (УФХН), 8 - источник электропитания, 9, 10, 11 и 12 - первый, второй, третий и четвертый акустические блоки (АБ), 13 - излучающий элемент, 14 - антенная решетка.
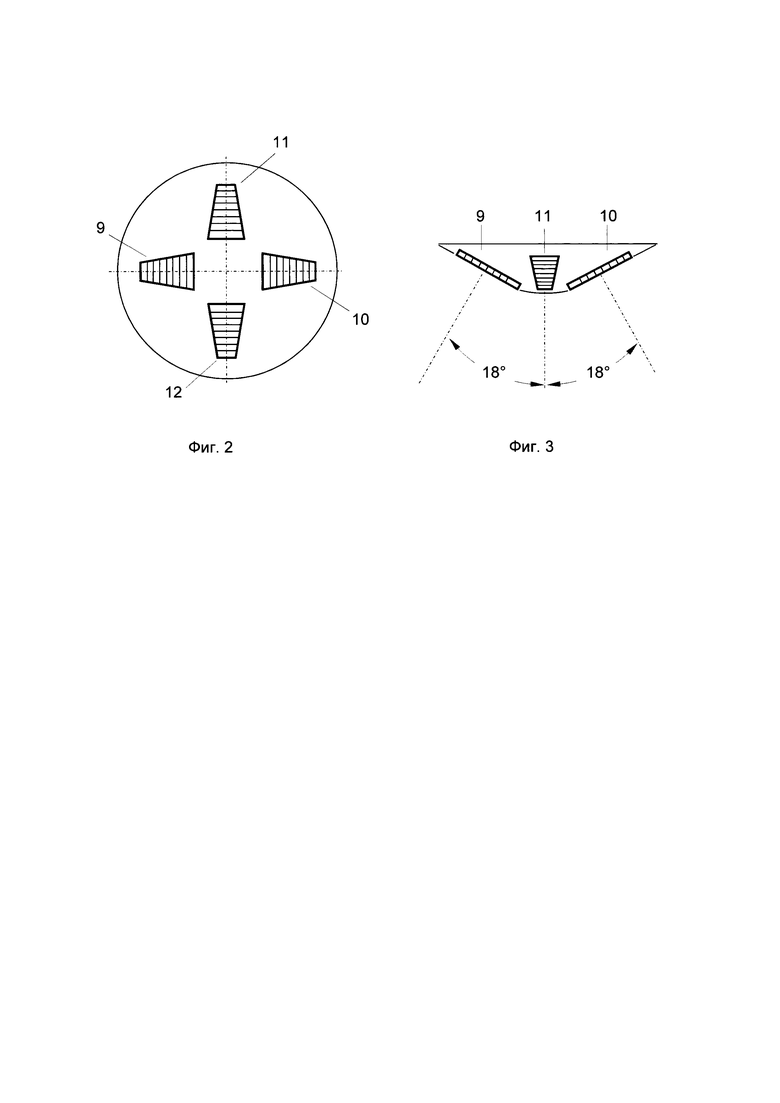
На фиг.2 и 3 изображена схема расположения АБ в акустической антенне, вид снизу (фиг.2) и сбоку (фиг.3).
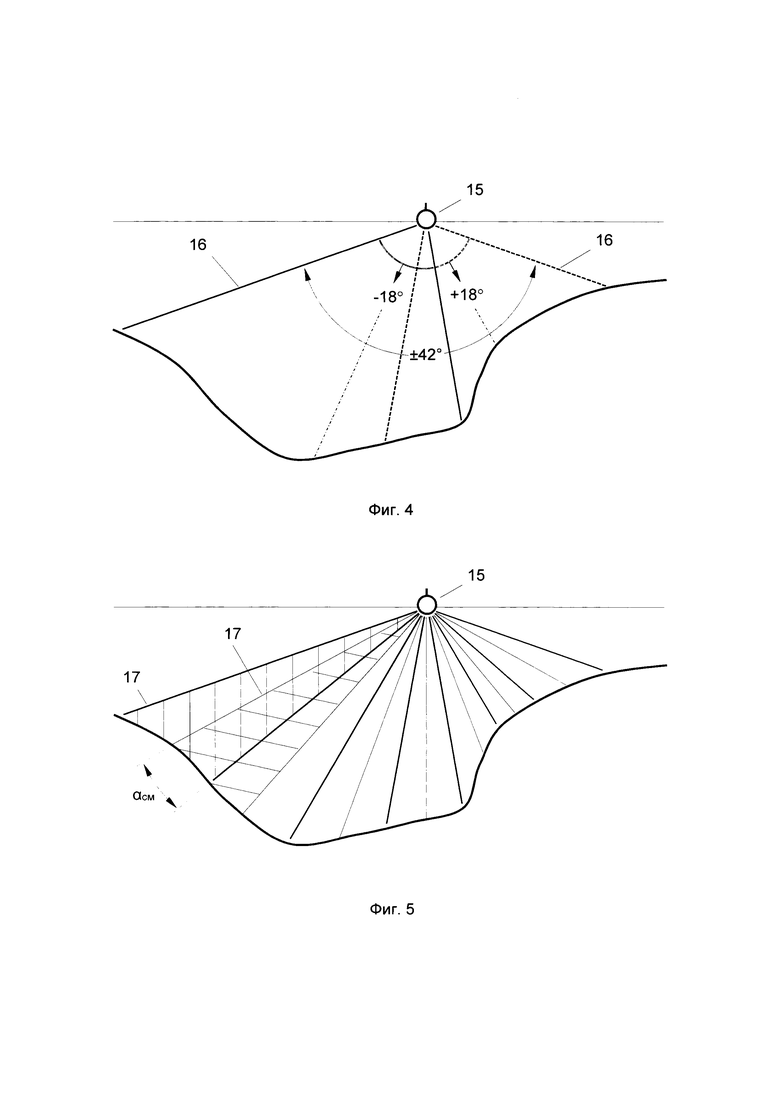
На фиг.4 и 5 изображен принцип обзора пространства в ВП, облучение сектора обзора (фиг.4) и прием сигналов (фиг.5), где 15 - беспроводной РЭЛ, 16 -ХН излучающего элемента, 17 - ХН антенной решетки, αсм - угол смещения соседних ХН антенной решетки.
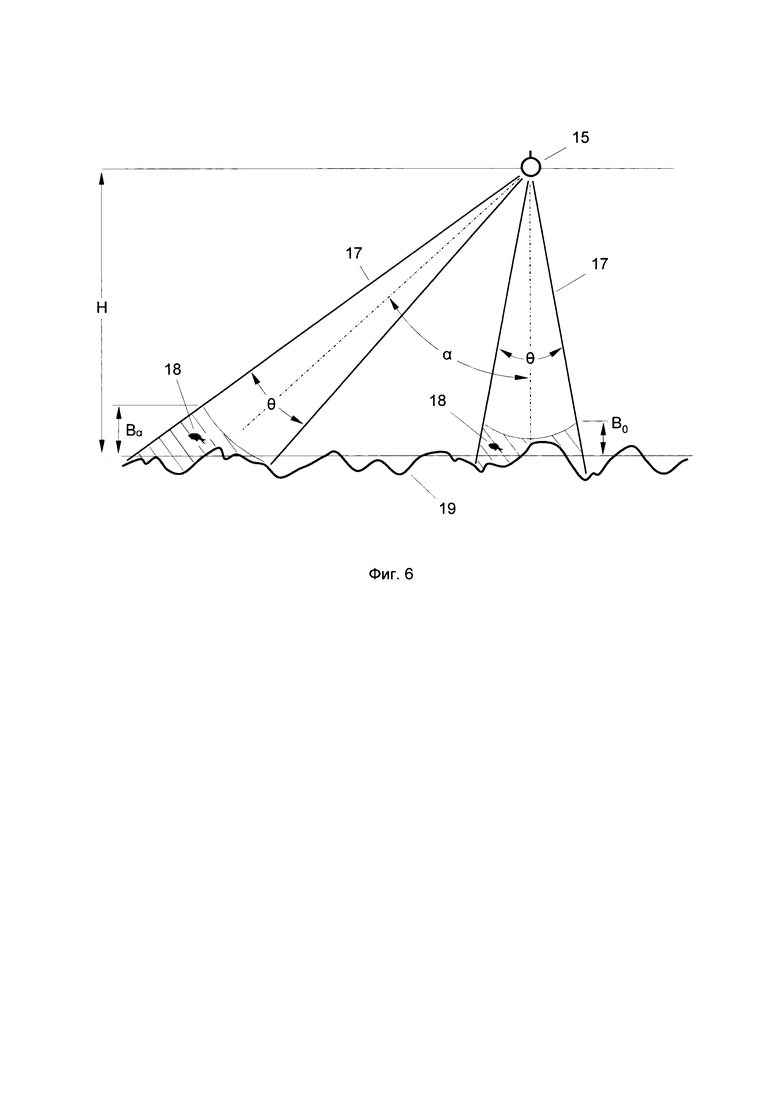
На фиг.6 изображено пояснение к расчету толщины непросматриваемого слоя, где 18 - рыба, 19 - дно, В0 и Вα - толщины непросматриваемого слоя, Н -глубина водоема, α и θ - угол наклона и ширина приемной ХН, соответственно.
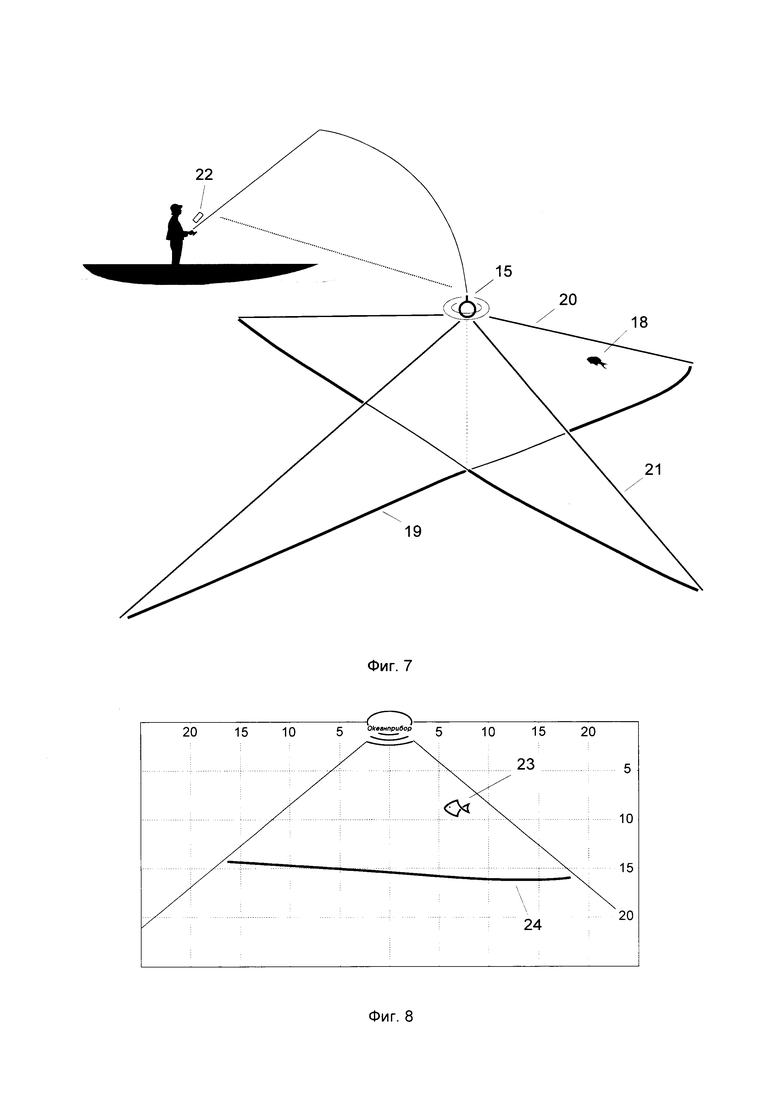
На фиг.7 изображен процесс получения информации о подводной обстановке, где 20 и 21 - секторы обзора, 22 - смартфон рыбака.
На фиг.8 изображено графическое представление гидроакустической информации, где 23 и 24 - отметки от рыбы и дна, соответственно.
Заявляемый беспроводной РЭЛ (фиг.1) состоит из аппаратной части 1, акустической антенны 2 и антенны 3 PC и представляет собой герметичный прибор сферической формы. Аппаратная часть 1 содержит ГУ 4, УПОС 5, УУ 6, УФХН 7 и источник 8 электропитания, а акустическая антенна 2 - первый 9, второй 10, третий 11 и четвертый 12 одинаковые АБ, каждый из которых содержит один излучающий элемент 13 и линейную антенную решетку 14 из семи приемных элементов. При этом входы излучающих элементов 13 первого 9, второго 10, третьего 11 и четвертого 12 АБ соединены с выходами ГУ 4, входы которого подключены ко второму, третьему, четвертому и пятому выходам УУ 6, первый выход которого соединен с входом антенны 3 PC. При этом выходы приемных элементов антенных решеток 14 АБ 9-12 соединены с соответствующими входами УПОС 5, выходы которого подключены к входам УФХН 7, выход которого в свою очередь соединен с входом УУ 6.
ГУ 4 имеет четыре канала, работающих каждый на свой АБ, и предназначено для выработки электрических сигналов, возбуждающих излучающие элементы 13 АБ 9-12. УПОС 5 состоит из четырех функциональных групп по семь каналов (каждая группа соединена со своим АБ) и обеспечивает усиление, фильтрацию, преобразование электрических сигналов, поступающих от приемных элементов антенных решеток 14, в цифровую форму. УУ 6 производит формирование сигналов управления для обеспечения режимов излучения и приема, а также информационный обмен в соответствии со стандартом Wi-Fi. УФХН 7 выполняет формирование набора вееров приемных ХН. Источник 8 электропитания - сменный аккумулятор - обеспечивает вторичным электропитанием отдельные цепи аппаратной части 1.
Принципы построения аппаратной части 1, а также методы обработки, реализуемые в ней, известны и описаны (Кобяков Ю.С, Кудрявцев Н.Н., Тимошенко В.И. Конструирование гидроакустической рыбопоисковой аппаратуры. - Л.: Судостроение, 1986. С.181-200), (Рыжиков А.В., Барсуков Ю.В. Системы и средства обработки сигналов в гидроакустике: Учеб. Пособие. - СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2007. С. 21-64), (Самойлов Л.К. Электронное управление характеристиками направленности антенн. - Л.: Судостроение, 1987. С. 32-44).
Первый 9, второй 10, третий 11 и четвертый 12 АБ предназначены для преобразования электрического сигнала, подаваемого на их излучающий элемент 13 от ГУ 4, в акустический сигнал в режиме излучения и преобразования акустических сигналов, принимаемых элементами их антенных решеток 14, в электрические, которые поступают в УПОС 5 в режиме приема.
АБ 9-12 установлены на несущую конструкцию (фиг.2 и 3) так, что оси симметрии их рабочих секторов расположены попарно во взаимно перпендикулярных ВП и отклонены во внешние стороны от вертикали на угол 18°. При этом излучающий элемент 13 каждого АБ обеспечивает формирование слабонаправленной в ВП ХН шириной ~48°, а их антенные решетки 14 из семи приемных элементов позволяют формировать в той же плоскости веера приемных ХН, компенсированных в направлениях ±18° и имеющих ширину не более 12°, а также величину добавочных максимумов менее 24%.
Заметим, что вариант антенной решетки из семи приемных элементов наиболее оптимален. Уменьшение числа элементов при фиксированных отношении I/λ (где I - длина антенной решетки, λ - длина волны) и угле компенсации ХН, приведет к росту добавочных максимумов, а увеличение -практически не изменит величины добавочных максимумов (Смарышев М.Д., Добровольский Ю.Ю. Гидроакустические антенны. Справочник по расчету направленных свойств гидроакустических антенн. - П.: Судостроение, 1984. С.157), но при этом значительно увеличит габариты и массу аппаратной части.
Антенна 3 PC - всенаправленная и предназначена для приема и излучения электромагнитных волн в частотном диапазоне стандарта Wi-Fi, обеспечивая передачу гидроакустических данных и прием команд управления.
Поясним достижимость технического результата.
Заявляемый беспроводной РЭЛ позволяет осуществлять секторный обзор пространства с величиной сектора обзора ±42° в двух взаимно перпендикулярных ВП: сначала в одной плоскости, затем в другой.
При этом заявляемый беспроводной РЭЛ 15 (фиг.4 и 5) обеспечивает одновременное облучение заданного сектора двумя ХН 16 излучающих элементов парных АБ: левой ХН в направлении -18° на частоте (F0 - 0.025F0), правой ХН в направлении +18° на частоте (F0 + 0,025F0), где F0 - центральная частота заявляемого беспроводного РЭЛ. Прием эхо-сигналов производится двумя веерами из семи ХН 17 каждый антенных решеток тех же АБ, сдвинутых одна относительно другой на угол αсм равный 6°.
Высокая разрешающая способность по углу в заявляемом беспроводном РЭЛ достигается за счет применения приемных ХН шириной не более 12°, что является достаточным для обнаружения как пелагических, так и придонных рыб (Орлов Л.В., Шабров А.А. Расчет и проектирование антенн гидроакустических рыбопоисковых станций. - М.: Пищ. пром-сть, 1974. С.4).
Образующийся при этом непросматриваемый слой (фиг.6), в котором эхо-сигналы от рыбы 18 маскируются эхо-сигналами от дна 19, будет иметь толщину, определяемую выражениями:


где Н - глубина водоема, м; α и θ - угол наклона и ширина приемной ХН, соответственно, град.
В частности, при глубине водоема Н = 15 м и θ = 12° согласно (1) и (2) значение В0 не превысит 0,1 м, а Вα составит около 1-2 м при α = (18-36)°.
Кроме того, малая величина добавочных максимумов приемных ХН позволяет практически исключить ложные эхо-сигналы, приходящие с направлений, не совпадающих с направлениями главных максимумов, что также обеспечивает заявленный технический результат.
Заявляемый беспроводной РЭЛ работает следующим образом (фиг.7).
В режиме излучения производится одновременное облучение сектора 20 обзора двумя ХН 16. При этом электрические сигналы с требуемыми значениями частоты с выходов двух каналов ГУ 4 поступают к излучающим элементам 13 парных АБ, преобразуются в акустические сигналы и излучаются в направлениях -18° и +18°. По окончании излучения эхо-сигналы от рыбы 18 и от дна 19 принимаются приемными элементами антенных решеток 14 тех же АБ, преобразуются в электрические сигналы и по четырнадцати каналам поступают в УПОС 5, где в каждом канале усиливаются, фильтруются в нужной полосе и преобразуются в цифровую форму. С выходов УПОС 5 оцифрованные сигналы поступают в УФХН 7, где подвергаются пространственно-временной обработке, обеспечивающей формирование двух вееров из семи приемных ХН 17 каждый, сдвинутых одна относительно другой на угол αсм = 6°. Далее веера поступают в УУ 6, где происходит их преобразование к виду, обеспечивающему передачу через антенну 3 PC на смартфон 22 рыбака. В нем выполняется выделение полезной информации, содержащейся во входных данных (факт обнаружения рыбы 18, ее координаты, оценка рельефа дна 19, вычисленная по каждой приемной ХН 17) и начинается новый цикл излучения-приема.
В результате этих действий на экране смартфона 22 (фиг.8) формируется изображение подводной обстановки относительно заявляемого беспроводного РЭЛ 15 в координатах «дальность - курсовой угол», где рыбе 18 соответствует отметка 23, а дну 19 - протяженная отметка 24.
Пользуясь показаниями смартфона 22, рыбак осуществляет наблюдение за меняющейся подводной обстановкой в секторе 20 обзора. Рыбак также может просмотреть сектор 21 обзора. Это достигается путем переключения аппаратной части 1 на работу с другой парой АБ.
Таким образом, заявляемый беспроводной РЭЛ обеспечивает обнаружение рыбы и получения сведений о рельефе дна. Применение излучающего элемента и линейной антенной решетки из семи приемных элементов в каждом из четырех АБ, наличие многоканальной аппаратной части и введение УФХН, позволяют реализовать одновременный обзор в широком секторе с высокой разрешающей способностью по углу в двух взаимно перпендикулярных ВП, благодаря чему обеспечивается возможность вести наблюдение одновременно за всеми рыбами, находящимися в зоне действия РЭЛ, в том числе и за быстро перемещающимися, что позволяет считать технический результат достигнутым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многолучевой эхолот автономного необитаемого подводного аппарата | 2021 |
|
RU2759497C1 |
| Гидролокатор кругового обзора автономного необитаемого подводного аппарата | 2020 |
|
RU2754604C1 |
| Способ съемки рельефа поверхности | 2020 |
|
RU2757065C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2014 |
|
RU2558003C1 |
| Гидроакустическая станция для обнаружения малоразмерных объектов | 2017 |
|
RU2680673C1 |
| Система противоторпедной защиты гидроакустического комплекса подводной лодки | 2016 |
|
RU2661066C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2010 |
|
RU2421755C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ НИЗКИХ ЗВУКОВЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ МОРСКИХ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2152627C1 |
| ГИДРОАКУСТИЧЕСКАЯ ПРИЕМНАЯ МНОГОЭЛЕМЕНТНАЯ АНТЕННА ВЫПУКЛОЙ ФОРМЫ ДВОЙНОЙ КРИВИЗНЫ, РАЗМЕЩАЕМАЯ В НОСОВОЙ ОКОНЕЧНОСТИ НОСИТЕЛЯ | 2016 |
|
RU2626072C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2013 |
|
RU2541435C1 |
Использование: изобретение относится к гидроакустической технике, в частности к рыбопоисковым эхолотам, предназначенным для использования в условиях рыбалки с целью обнаружения рыбы и получения сведений о рельефе дна. Технический результат: обеспечение одновременного обзора пространства в широком секторе с высокой разрешающей способностью по углу. Сущность: применение излучающего элемента и линейной антенной решетки из семи приемных элементов в каждом из четырех акустических блоков, наличие многоканальной аппаратной части и введение устройства формирования характеристик направленности позволили реализовать одновременный обзор в широком секторе с высокой разрешающей способностью по углу в двух взаимно перпендикулярных вертикальных плоскостях. 8 ил.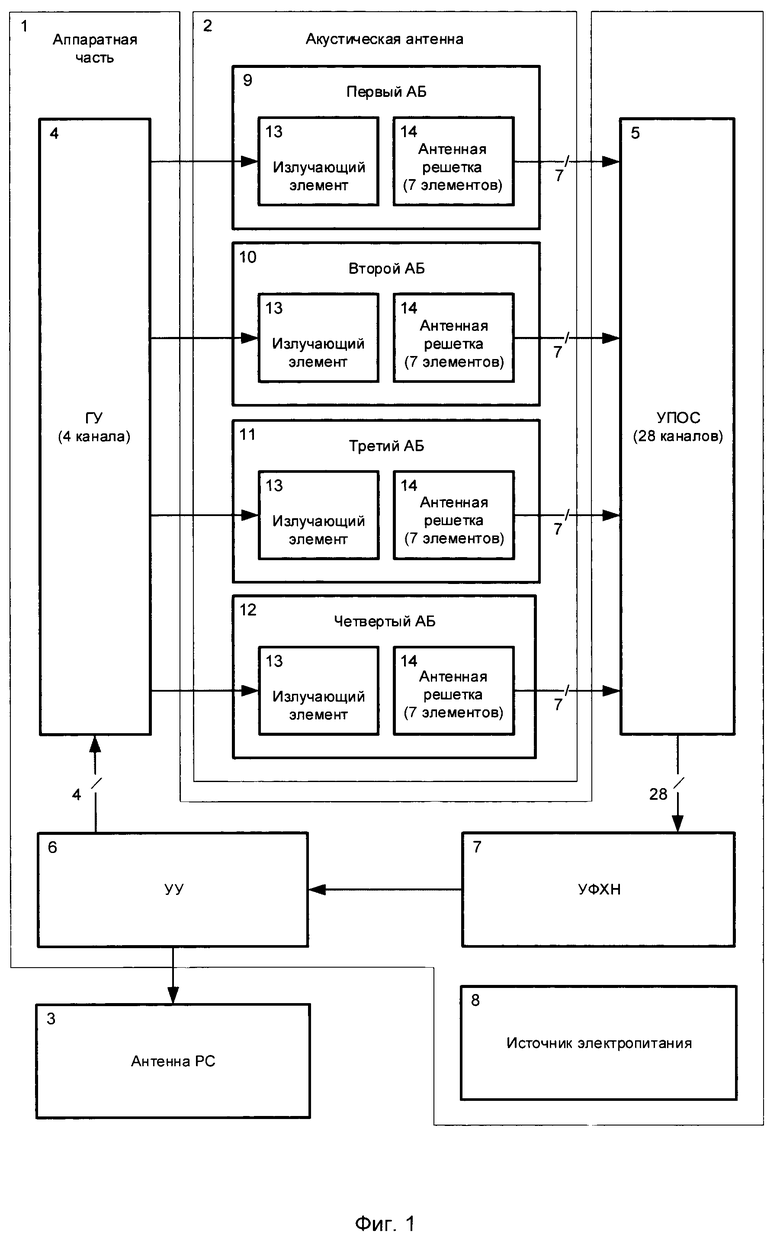
Беспроводной рыбопоисковый эхолот, содержащий аппаратную часть, акустическую антенну и антенну радиосвязи (PC), в котором аппаратная часть содержит генераторное устройство (ГУ), устройство предварительной обработки сигналов (УПОС), устройство управления (УУ) и источник электропитания, а акустическая антенна - четыре одинаковых акустических блока (АБ), ориентированных так, что оси симметрии их рабочих секторов расположены попарно во взаимно перпендикулярных вертикальных плоскостях и отклонены во внешние стороны от вертикали на некоторый угол, при этом первый выход УУ соединен с входом антенны PC, отличающийся тем, что каждый из четырех АБ содержит один излучающий элемент и линейную антенную решетку из семи приемных элементов, аппаратная часть выполнена многоканальной и в нее введено устройство формирования характеристик направленности (УФХН), при этом входы излучающих элементов соединены с выходами ГУ, входы которого подключены ко второму, третьему, четвертому и пятому выходам УУ, а выходы приемных элементов антенных решеток соединены с входами УПОС, при этом выходы УПОС подключены к входам УФХН, выход которого соединен с входом УУ.
| Автомат для отмеривания и резки двухжильных проводов | 1960 |
|
SU140840A1 |
| Устройство для дистанционного управления приводом стрелки | 1960 |
|
SU143839A1 |
| ДАТЧИК ВРЕМЕНИ | 0 |
|
SU178905A1 |
| МАГНИЙМАРГАНЦЕВЫЙ ФЕРРИТ | 0 |
|
SU213214A1 |
| Многолучевой эхолот автономного необитаемого подводного аппарата | 2021 |
|
RU2759497C1 |
| US 10247826 B2, 02.04.2019. | |||
