Изобретение относится к гидроакустической технике, в частности к бортовой аппаратуре автономных необитаемых подводных аппаратов (АНПА) легкого и среднего класса модульного исполнения, предназначенных для обследования рельефа дна, затонувших объектов и искусственных сооружений.
Применение АНПА для проведения обследовательских работ под водой показало большую перспективность этого направления.
В настоящее время основным средством получения информации о формах рельефа дна и подводных объектов является многолучевой эхолот (МЛЭ).
Известны МЛЭ группы компаний Teledyne Marine Acoustic Imaging Group (http://www.teledynemarine.com), компаний Imagenex Technology Corp.(http://www.imagenex.com), Kongsberg Maritime (http://www.km.kongsberg.com), Norbit Subsea (http://www.norbit.com), R2Sonic LLC (http://www.r2sonic.com) и Tritech International Ltd (http://www.tritech.co.uk), устанавливаемые на АНПА. Все перечисленные модели выполнены в виде одного или нескольких законченных устройств без привязки к конкретному проекту аппарата, и именно с этим связан их основной недостаток - сложность компоновки в составе малогабаритного АНПА модульного исполнения. В то же время, выполнение МЛЭ в виде отдельного модуля (отсека) полезной нагрузки упрощает общую сборку АНПА, повышает качество монтажа, обеспечивает жесткость и прочность конструкции аппарата.
Наиболее близким к заявляемому изобретению по своему назначению, технической сущности и достигаемым результатам является МЛЭ Sonic 2026 компании R2Sonic LLC (http://www.r2sonic.com), выполненный в виде носового отсека Survey Head ONE АНПА SeaCat компании ATLAS ELEKTRONIK GmbH (http://www.atlas-elektronik.com).
Устройство-прототип содержит излучающую и приемную гидроакустические антенные системы (АС) и обтекатель. Излучающая АС образована генераторным устройством (ГУ) и излучающей цилиндрической антенной решеткой с одним активным сегментом, а приемная АС - устройством управления и цифровой обработки сигналов (УУиЦОС), устройством предварительной обработки сигналов (УПОС), вторичным источником электропитания (ВИП) и приемной линейной антенной решеткой, при этом выход УУиЦОС подключен к входу ГУ, выход которого соединен с излучающей антенной решеткой, а вход - к выходу УПОС, вход которого соединен с приемной антенной решеткой.
Устройство-прототип закреплено на АНПА таким образом, что излучающая антенная решетка расположена вдоль диаметральной плоскости аппарата, а приемная - перпендикулярно к ней.
При работе устройство-прототип производит излучение акустического зондирующего сигнала в сторону дна. При этом по сигналу от УУиЦОС ГУ формирует электрические сигналы, подводимые к излучающей антенной решетке, где они преобразуются в акустический зондирующий сигнал.
В режиме приема рассеянные (отраженные) в направлении на устройство-прототип сигналы принимаются приемной антенной решеткой, где преобразуются в электрические сигналы, и поступают в УПОС. В нем принятые сигналы подвергаются предварительной обработке и подаются в УУиЦОС, где осуществляется пространственная обработка входных сигналов, результаты которой передаются в вычислительную систему АНПА для записи на накопитель, и начинается новый цикл «излучение-прием».
Далее на борту обеспечивающего судна производится перезапись накопленных данных, выполняется обработка результатов съемки и формируется трехмерное изображение обследуемой поверхности.
При этом трехмерное изображение формируется из профилей глубин, следующих друг за другом, где каждый профиль является двумерным набором значений глубины и соответствующего горизонтального расстояния до точки привязки глубины. При этом значения указанных параметров рассчитываются на основе сигналов рассеянных (отраженных) элементами разрешения обследуемой поверхности, которые ограничены шириной эквивалентных характеристик направленности (ХН), образованных в результате перекрытия широкой в вертикальной (ВП) и узкой в горизонтальной (ГП) плоскостях ХН излучающей АС и веера широких в ГП и узких в ВП статических ХН приемной АС.
Недостатком устройства-прототипа является снижение степени схожести рассчитанных и истинных профилей глубин по мере удаления от центральной части рассчитанного профиля к краям из-за расширения ХН приемной АС в ВП при ее наклоне в этой же плоскости.
Задача изобретения состоит в повышении эффективности обследования рельефа дна, затонувших объектов и искусственных сооружений.
Технический результат реализации изобретения заключается в повышении подробности и точности рассчитанных профилей глубин обследуемой поверхности в направлении крайних ХН приемной АС.
Для достижения технического результата в МЛЭ, выполненный в виде носового отсека АНПА и содержащий излучающую и приемную гидроакустические АС и обтекатель, в котором излучающая АС образована ГУ и излучающей цилиндрической антенной решеткой с одним активным сегментом, а приемная АС - УУиЦОС, первым УПОС, ВИП и первой приемной линейной антенной решеткой, при этом выход УУиЦОС подключен к входу ГУ, выход которого соединен с излучающей антенной решеткой, а первый вход - к выходу первого УПОС, вход которого соединен с первой приемной антенной решеткой, при этом МЛЭ закреплен на АНПА таким образом, что излучающая антенная решетка расположена вдоль диаметральной плоскости аппарата, а первая приемная антенная решетка - перпендикулярно к ней, введены новые признаки, а именно:
- в приемную АС введены второе и третье УПОС и вторая и третья приемные линейные антенные решетки, при этом второй и третий входы УУиЦОС подключены к выходу второго и третьего УПОС, вход каждого из которых соединен с соответствующей приемной антенной решеткой;
- при этом приемные антенные решетки расположены параллельно, так что первая решетка установлена между второй и третьей;
- при этом в каждой из приемных антенных решеток установлено одинаковое количество пьезоэлектрических преобразователей, так что акустические оси преобразователей первой решетки наклонены под углом 0°, второй - 45°, а третьей - минус 45° относительно вертикальной оси приемной АС.
Сущность изобретения поясняется фиг.1-7.
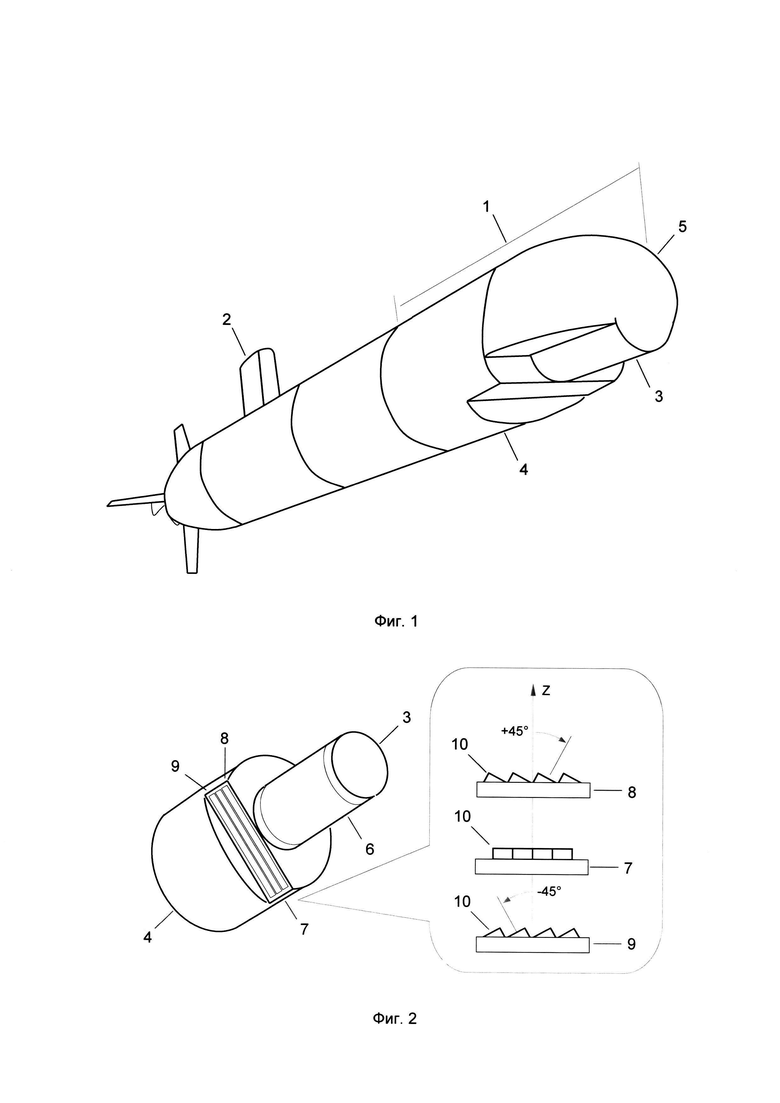
На фиг.1 изображены заявляемый МЛЭ и АНПА в сборе, где 1 - заявляемый МЛЭ, 2 - АНПА, 3 и 4 - излучающая и приемная АС, 5 - обтекатель.
На фиг.2 изображены излучающая и приемная АС в сборе и схема расположения пьезоэлектрических преобразователей в приемных антенных решетках, где 6 - излучающая антенная решетка, 7, 8 и 9 - первая, вторая и третья приемные антенные решетки, 10 - пьезоэлектрический преобразователь приемной антенной решетки, Ζ - вертикальная ось приемной АС. На схеме расположения преобразователей изображения антенных решеток смещены и развернуты.
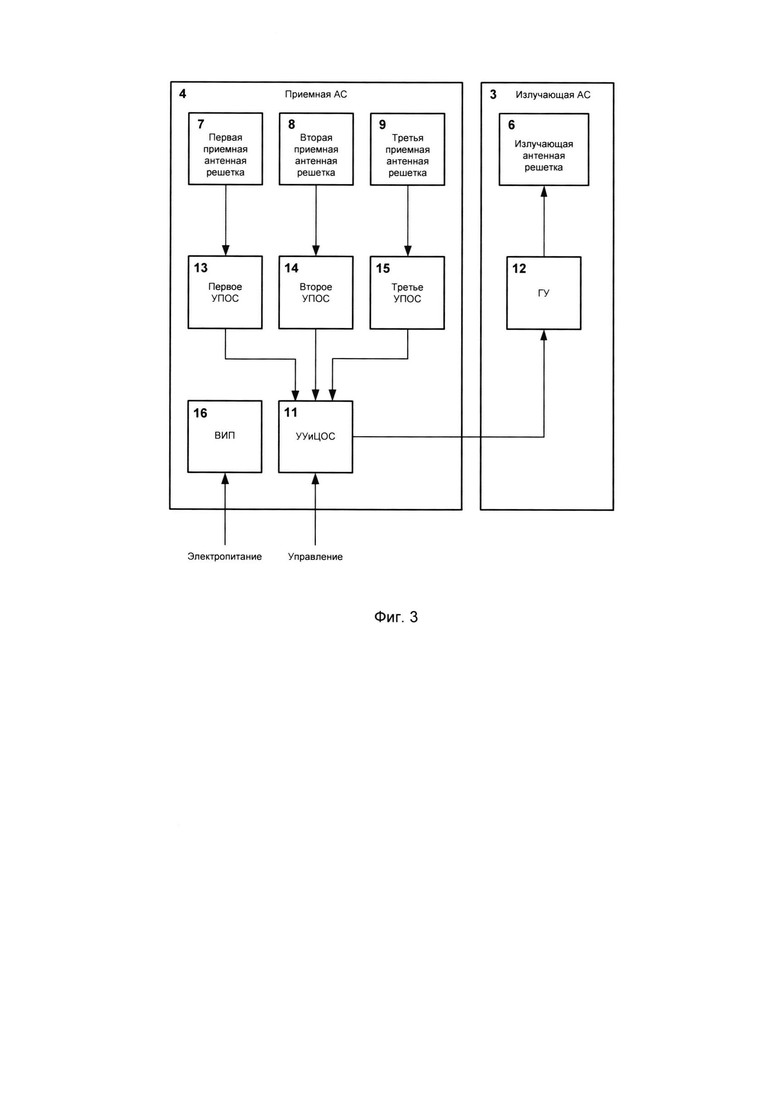
На фиг.3 изображена структурная схема заявляемого МЛЭ, где 11 - устройство управления и цифровой обработки сигналов (УУиЦОС), 12 - генераторное устройство (ГУ), 13, 14 и 15 - первое, второе и третье устройства предварительной обработки сигналов (УПОС), 16 - вторичный источник электропитания (ВИП).
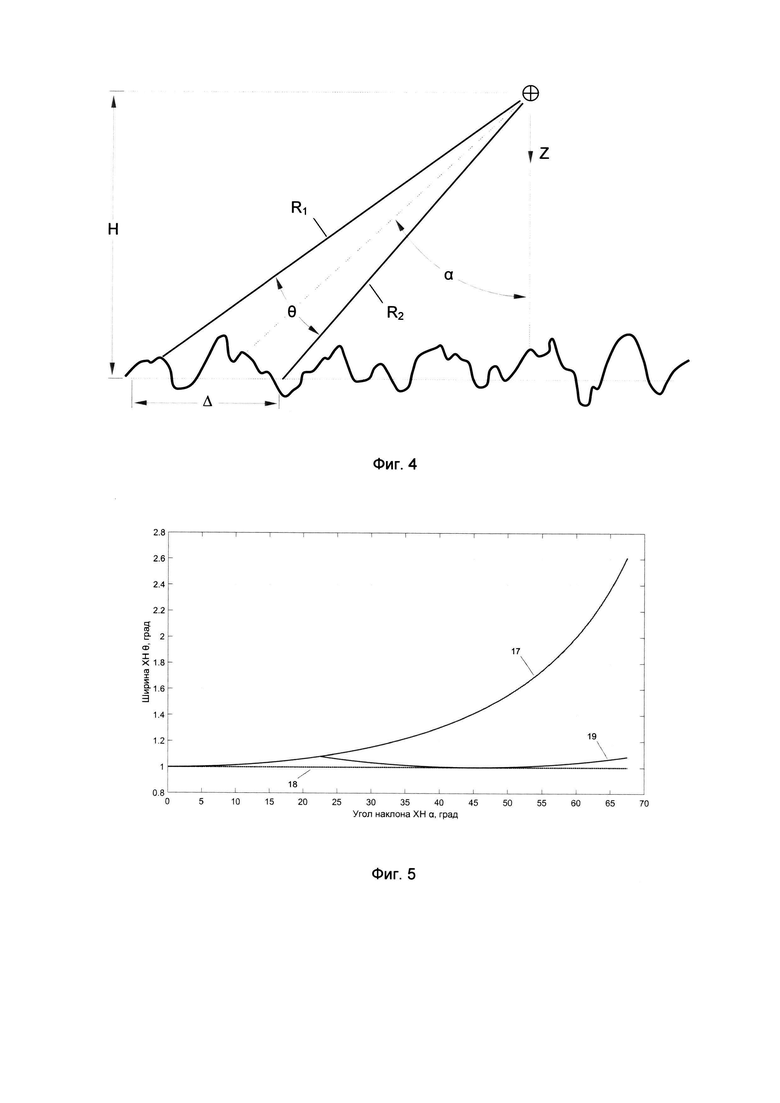
На фиг.4 изображено пояснение к снижению подробности и точности рассчитанного профиля глубин при сложной структуре обследуемой поверхности. Здесь R1 и R2 - наклонные дальности, Η - глубина, Δ - ширина элемента разрешения, α и θ - угол наклона и ширина ХН приемной АС в ВП.
На фиг.5 изображены графики зависимости ширины ХН приемной АС в ВП от угла наклона ХН в этой же плоскости для трех устройств, где 17, 18 и 19 - кривые для устройства-прототипа, МЛЭ с приемной дуговой антенной решеткой и заявляемого МЛЭ.
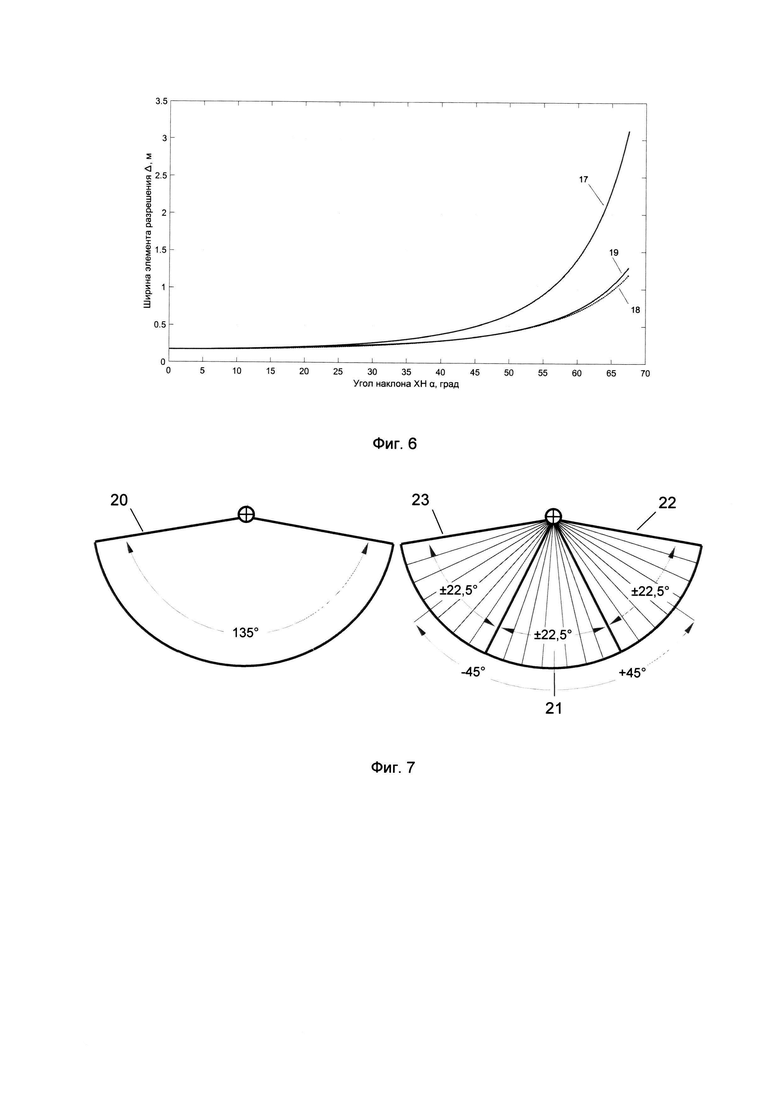
На фиг.6 изображены графики зависимости ширины элемента разрешения от угла наклона ХН приемной АС в ВП для трех устройств.
На фиг.7 изображена схема обзора пространства в ВП заявляемым МЛЭ, где 20 - ХН излучающей АС в ВП, 21, 22 и 23 - центральный, правый и левый веера статических ХН приемной АС в ВП.
Заявляемый МЛЭ 1 (фиг.1 и 2) выполнен в виде носового отсека АНПА 2 и состоит из излучающей 3 и приемной 4 АС и обтекателя 5. Излучающая АС 3 монтируется на переднем торце приемной АС 4, с которой имеет электрическое соединение, и закрывается сверху обтекателем 5. На заднем торце приемной АС 4 имеется соединительный узел и установлен электрический вывод (на фиг.1 и 2 не показаны) для обеспечения стыковки и электрического соединения заявляемого МЛЭ 1 с другим отсеком АНПА 2.
Излучающая АС 3 (фиг.3) содержит ГУ 12 и излучающую антенную решетку 6, а приемная АС 4 - УУиЦОС 11, первое 13, второе 14 и третье 15 УПОС, ВИП 16 и первую 7, вторую 8 и третью 9 приемные антенные решетки. Выход УУиЦОС 11 подключен к входу ГУ 12, выход которого соединен с излучающей антенной решеткой 6, а первый, второй и третий входы - к выходу первого 13, второго 14 и третьего 15 УПОС, вход каждого из которых соединен с соответствующей приемной антенной решеткой. Электропитание и управление заявляемым МЛЭ 1 осуществляется от системы энергообеспечения (СЭ) и системы управления (СУ) (на фиг.3 не показаны) АНПА 2, соединенных с входом ВИП 16 и УУиЦОС 11, соответственно.
АНПА 2 представляет собой обследовательский аппарат легкого или среднего класса модульного исполнения. Конкретными примерами подходящих аппаратов являются, но не ограничиваются ими, АНПА Gavia компании Teledyne Gavia, SeaCat компании ATLAS ELEKTRONIK GmbH и многие другие.
Обтекатель 5 предназначен для снижения гидродинамического сопротивления и гидродинамической помехи, обеспечения требуемых балластировочных характеристик АНПА 2, а также для защиты излучающей 3 и приемной 4 АС от случайных ударов о дно и корпус обеспечивающего судна. Обтекатель 5 является съемным, имеет криволинейную форму, предающую аппарату желаемые внешние обводы, и выполнен, например, из сферопластика.
УУиЦОС 11 предназначено для информационного обмена с СУ АНПА 2, формирования временной диаграммы работы заявляемого МЛЭ 1 и контроля его технического состояния, генерации сигналов и команд, задающих работу ГУ 12, первого 13, второго 14 и третьего 15 УПОС, и осуществления пространственной обработки входных сигналов. ГУ 12 предназначено для формирования электрических сигналов с требуемыми значениями напряжения, частоты и скважности, необходимых для возбуждения излучающей антенной решетки 6. Первое 13, второе 14 и третье 15 УПОС обеспечивают усиление, полосовую фильтрацию, сжатие динамического диапазона и преобразование электрических сигналов, поступающих от первой 7, второй 8 и третьей 9 приемных антенных решеток, соответственно, в цифровой вид и далее их квадратурную демодуляцию с цифровым смешиванием. ВИП 16 обеспечивает преобразование напряжения электропитания, поступающего от СЭ АНПА 2, в напряжения необходимые для электропитания составных частей заявляемого МЛЭ 1. Аппаратная часть заявляемого МЛЭ 1 выполнена в виде электронных блоков цилиндрической формы, вставленных внутрь прочных корпусов излучающей 3 и приемной 4 АС.
Принципы построения аппаратной части заявляемого МЛЭ 1, а также методы обработки, реализуемые в ней известны и описаны (Кобяков Ю.С., Кудрявцев Н.Н., Тимошенко В.И. Конструирование гидроакустической рыбопоисковой аппаратуры. - Л.: Судостроение, 1986. 272 с), (Рыжиков А.В., Барсуков Ю.В. Системы и средства обработки сигналов в гидроакустике: Учеб. пособие. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2007. 144 с).
Излучающая антенная решетка 6 предназначена для преобразования электрических сигналов, поступающих на нее от ГУ 12, в акустические зондирующие сигналы. Излучающая антенная решетка 6 выполнена цилиндрической с одним активным сегментом, секционированным по высоте. При этом каждая секция может быть образована кольцевым пьезоэлектрическим преобразователем, механически разделенным минусовым электродом на активный и пассивный сегменты, или собрана из трапецеидальных преобразователей, электрически объединенных в один канал. Ширина некомпенсированной ХН излучающей антенной решетки 6 составляет не менее 135° в ВП и не более 1° в ГП. При этом излучающая АС 3 допускает возможность наклона ХН в ГП в секторе углов ±5° для компенсации дифферента АНПА 2.
Первая 7, вторая 8 и третья 9 приемные антенные решетки предназначены для преобразования принимаемых акустических сигналов в электрические, которые подаются в первое 13, второе 14 и третье 15 УПОС, соответственно. Приемные антенные решетки выполнены линейными и располагаются параллельно друг другу так, что первая решетка установлена между второй и третьей. В каждой из приемных антенных решеток содержится одинаковое количество пьезоэлектрических преобразователей 10, которые установлены на несущую конструкцию так, что акустические оси преобразователей первой решетки наклонены под углом 0°, второй - 45°, а третьей - минус 45° относительно вертикальной оси Ζ приемной АС 4. Ширина некомпенсированной ХН каждой из приемных антенных решеток составляет не менее 10° в ГП и не более 1° в ВП. При этом приемная АС 4 допускает возможность одновременного формирования трех вееров статических ХН с максимальным наклоном ХН в ВП в каждом веере ±22,5° относительно вертикальной оси соответствующей приемной антенной решетки, а соответствующее расположение преобразователей в каждой из решеток обеспечивает обзор пространства в ВП в секторе углов не менее 135°.
Поясним достижимость технического результата.
Трехмерное изображение должно с наибольшей подробностью и точностью передавать характерные формы обследуемой поверхности.
Подробность и точность оценки глубины рассчитанных профилей во многом зависят от ширины элемента разрешения Δ (фиг.4), которая может быть определена выражениями

R1=H/cos(α+θ/2), R2=H/cos(α - θ/2),
где R1 и R2 - наклонные дальности, м; Η - глубина, м; α и θ - угол наклона и ширина ХН приемной АС в ВП, град.
Действительно, обследуемые поверхности в общем случае не являются ни ровными, ни горизонтальными. И если в пределах элемента разрешения оказывается совокупность неровностей (впадины, выступы), то вследствие осреднения батиметрических данных по всему элементу, существенно ухудшается точность определения глубины и искажается рассчитанный профиль с заметной тенденцией к сглаживанию.
Эффективной мерой уменьшения ширины элемента разрешения и, как следствие, повышения подробности и точности рассчитанного профиля глубин является сужение основного лепестка ХН приемной АС в ВП. Однако при использовании в приемной АС линейной антенной решетки с наклоном ХН наблюдается расширение основного лепестка, значение которого растет обратно пропорционально косинусу угла наклона, т.е. θ=θ0/cosα, где θ0 - ширина некомпенсированной ХН. Это приводит к необходимости применения в приемной АС дуговой антенной решетки с постоянной шириной ХН, но при этом существенно увеличивается максимальный размер решетки, что в ряде случаев не позволяет конструктивно ее вписать в обводы малогабаритного АНПА. Оптимальным решением, позволяющим разрешить указанное противоречие, является использование нескольких линейных антенных решеток, каждая из которых формирует веер статических ХН в узком секторе с незначительным расширением основного лепестка, а в совокупности они обеспечивают обзор пространства в широком секторе обзора, как это делается в заявляемом МЛЭ.
Графики зависимости ширины ХН θ приемной АС в ВП от угла наклона ХН a в этой же плоскости приведены на фиг.5. Графики зависимости ширины элемента разрешения Δ от угла наклона ХН α в ВП, согласно (1), представлены на фиг.6. Кривые 17, 18 и 19 получены для устройства-прототипа, МЛЭ с приемной дуговой антенной решеткой и заявляемого МЛЭ, соответственно, при θ0=1° и Η=10 м. Из анализа представленных на фиг.5 и 6 кривых следует, что использование трех линейных антенных решеток, выполненных в виде ориентированных определенным образом пьезоэлектрических преобразователей, позволяет формировать остронаправленные ХН в ВП в широком секторе обзора, уменьшить ширину элемента разрешения в направлении крайних ХН приемной АС и, как следствие, повысить подробность и точность рассчитанных профилей глубин.
Заявляемый МЛЭ работает следующим образом (фиг.7).
После подачи электропитания от СЭ АНПА 2 и при поступлении команд управления от СУ АНПА 2 запускается цикл «излучение-прием». По сигналу от УУиЦОС 11 ГУ 12 формирует электрические сигналы и подает их на излучающую антенную решетку 6, где они преобразуются в акустический зондирующий сигнал, который излучается в сторону дна. При этом излучающая АС 3 формирует ХН 20, ширина которой в ВП составляет не менее 135°. Рассеянные (отраженные) в направлении на заявляемый МЛЭ 1 сигналы принимаются первой 7, второй 8 и третьей 9 приемными антенными решетками, где преобразуются в электрические сигналы, и поступают в первое 13, второе 14 и третье 15 УПОС, соответственно. В них принятые сигналы усиливаются, фильтруются, сжимаются, оцифровываются, подвергаются квадратурной демодуляции с цифровым смешиванием и подаются в УУиЦОС 11. В УУиЦОС 11 осуществляется формирование центрального 21, правого 22 и левого 23 вееров статических ХН с максимальным наклоном ХН в ВП в каждом веере ±22,5° относительно вертикальной оси соответствующей приемной антенной решетки. Далее веера статических ХН передаются в СУ АНПА 2 для записи на накопитель и начинается новый цикл «излучение-прием».
При этом сканирование обследуемой поверхности в ВП происходит за счет распространения в водной среде зондирующих сигналов, а в направлении движения заявляемого МЛЭ 1 - за счет поступательного движения АНПА 2.
Далее на борту обеспечивающего судна производится перезапись накопленных данных, выполняется обработка результатов съемки и формируется трехмерное изображение обследуемой поверхности.
Таким образом, технический результат реализации изобретения достигнут, так как по сравнению с устройством-прототипом в заявляемом МЛЭ за счет формирования трех вееров статических ХН равномерно перекрывающих широкий сектор обзора, в каждом из которых наклон ХН происходит в узком секторе с незначительным расширением основного лепестка, обеспечивается повышение подробности и точности рассчитанных профилей глубин обследуемой поверхности в направлении крайних ХН приемной АС.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспроводной рыбопоисковый эхолот | 2022 |
|
RU2797778C1 |
| Гидролокатор кругового обзора автономного необитаемого подводного аппарата | 2020 |
|
RU2754604C1 |
| Способ съемки рельефа дна акватории | 2021 |
|
RU2757560C1 |
| Приемный тракт гидролокатора | 2019 |
|
RU2719730C1 |
| Гидроакустическая станция для обнаружения малоразмерных объектов | 2017 |
|
RU2680673C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2014 |
|
RU2548596C1 |
| Устройство для съемки рельефа дна акватории | 2018 |
|
RU2703786C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2013 |
|
RU2541435C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА | 2011 |
|
RU2472178C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2659710C1 |
Использование: изобретение относится к гидроакустической технике, в частности к бортовой аппаратуре автономных необитаемых подводных аппаратов легкого и среднего класса модульного исполнения, предназначенных для обследования рельефа дна, затонувших объектов и искусственных сооружений. Сущность: использование в МЛЭ трех приемных линейных антенных решеток, обеспечивающих возможность формирования трех вееров статических ХН, равномерно перекрывающих широкий сектор обзора, в каждом из которых наклон ХН происходит в узком секторе с незначительным расширением основного лепестка, позволило повысить подробность и точность рассчитанных профилей глубин обследуемой поверхности в направлении крайних ХН приемной АС. Технический результат: повышение подробности и точности рассчитанных профилей глубин обследуемой поверхности в направлении крайних ХН приемной АС. 7 ил.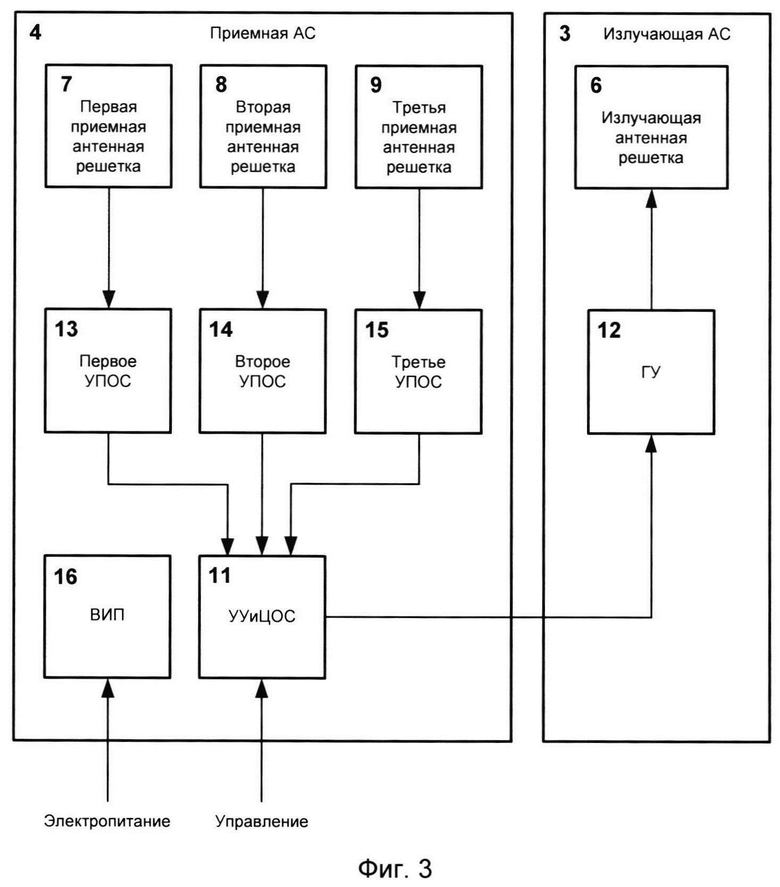
Многолучевой эхолот (МЛЭ), выполненный в виде носового отсека автономного необитаемого подводного аппарата (АНПА) и содержащий излучающую и приемную гидроакустические антенные системы (АС) и обтекатель, в котором излучающая АС образована генераторным устройством (ГУ) и излучающей цилиндрической антенной решеткой с одним активным сегментом, а приемная АС - устройством управления и цифровой обработки сигналов (УУиЦОС), первым устройством предварительной обработки сигналов (УПОС), вторичным источником электропитания и первой приемной линейной антенной решеткой, при этом выход УУиЦОС подключен к входу ГУ, выход которого соединен с излучающей антенной решеткой, а первый вход - к выходу первого УПОС, вход которого соединен с первой приемной антенной решеткой, при этом МЛЭ закреплен на АНПА таким образом, что излучающая антенная решетка расположена вдоль диаметральной плоскости аппарата, а первая приемная антенная решетка - перпендикулярно к ней, отличающийся тем, что в приемную АС введены второе и третье УПОС и вторая и третья приемные линейные антенные решетки, при этом второй и третий входы УУиЦОС подключены к выходу второго и третьего УПОС, вход каждого из которых соединен с соответствующей приемной антенной решеткой, при этом приемные антенные решетки расположены параллельно, так что первая решетка установлена между второй и третьей, при этом в каждой из приемных антенных решеток установлено одинаковое количество пьезоэлектрических преобразователей, так что акустические оси преобразователей первой решетки наклонены под углом 0°, второй - 45°, а третьей - минус 45° относительно вертикальной оси приемной АС.
| 0 |
|
SU161175A1 | |
| WO 2003059734 A1, 24.07.2003 | |||
| Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки | 2018 |
|
RU2681415C1 |
| US 9174713 B2, 03.11.2015 | |||
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА | 2014 |
|
RU2572666C1 |

