Изобретение относится к области гидроакустической техники и может быть использовано для съемки рельефа поверхности дна и/или нижней кромки льда в реальном масштабе времени даже при нулевой скорости движения носителя, на котором установлено оборудование, реализующее заявленный способ.
Наиболее важными задачами, решаемыми при съемке рельефа поверхности дна и/или нижней кромки льда, являются задачи обнаружения интересующих целей - предметов на дне, характер изрезанность самого дна, поиск разводий в ледяных полях. Решение указанных задач необходимо для обеспечения безопасности плавания, а так же может быть использовано при проведении поисково-разведочных и добычных работ на месторождениях полезных ископаемых со дна морей и океанов.
Актуальной задачей является повышение скорости съемки рельефа поверхности без увеличения аппаратных средств, позволяющие снизить стоимость проводимой съемки.
Известны способы сокращения времени обзора сектора пространства в гидролокационных средствах описанные в статье Бородина М.А. «Анализ способов сокращения времени обзора пространства в гидролокационных средствах», Прикладные технологии гидроакустики и гидрофизики. Труды XIII Всероссийской конференции, 24-26 мая 2016 г., с. 82-84 (2016). В статье выполнено сравнение последовательного, временного, частотного и кодового разделения, в том числе с использованием квазиортогональных сигналов, пространственных каналов гидролокационного средства. В статье показано, что из рассмотренных способов способ последовательного разделения пространственных каналов требует минимальное количество аппаратурных затрат и обеспечивает минимальную мертвую зону и высокое разрешение по дальности вследствие возможности использования более коротких импульсов в излучении. Недостатком последовательного обзора в угломестной плоскости и параллельного в плоскости курсовых углов является значительное время обзора, особенно при использовании узких ХН излучающей антенны. Остальные способы сокращения времени обзора обладают как преимуществами, так и недостатками и для их реализации требуется значительное увеличение аппаратных средств.
Известен многолучевой эхолот для съемки рельефа дна акватории (Патент US №2017/0315236 Α1, МПК G01S 15/89, NOV 02.2017), содержащий одну группу излучателей и одну группу гидрофонов. Эхолот излучает зондирующий импульс, содержащий несколько несущих частот, принимает эхо-сигнал, декодирует его, что по существу является одновременным выполнением нескольких задач съемки поверхности дна, и это сокращает общее время съемки рельефа поверхности дна.
Недостатком способа съемки с использованием этого многолучевого эхолота является то, что съемку рельефа поверхности можно производить только при движении носителя эхолота, так как сканирование исследуемой поверхности производиться за счет движения носителя эхолота, а так же требуется значительный объем аппаратных средств для обработки эхо-сигналов, так как эта обработка должна производиться одновременно на нескольких частотах.
Наиболее близким аналогом к предлагаемому способу является способ оценки состояния ледового поля (Патент RU №2559311 С1, 19.05.2014), который реализуют с помощью гидроакустических излучающей и приемной антенн, соединенных Т-образно и размещенных в плоскости, параллельной плоскости, совпадающей со средним уровнем водной поверхности в спокойном состоянии, излучение акустических импульсов производят излучающей антенной с характеристикой направленности (ХН), прием эхосигналов от нижней поверхности льда производят приемной антенной, формируют статический веер приемных ХН электронным способом, обзор участка нижней поверхности льда в пределах сектора обзора производят за заданное число циклов зондирования путем последовательного-пошагового поворота оси ХН излучающей антенны в плоскости ее наибольшего размера относительно нормали к нижней поверхности льда, для каждого положения оси ХН излучающей антенны в полосе обзора измеряют расстояния от приемной антенны до нижней поверхности льда, перед началом каждого цикла зондирования производят измерение и коррекцию углов наклона излучающей и приемной антенн в плоскостях их наибольших размеров.
Существенным недостатком данного способа-прототипа является его низкая производительность, вследствие того, что в процессе сканирования сектора обзора узкой характеристикой направленности в излучении при проведении съемки рельефа поверхности не учитывается изменение расстояния до обследуемой поверхности.
Этот недостаток приводит к увеличению времени съемки рельефа поверхности, снижению ее эффективности, увеличению временных затрат на ее проведение и себестоимость самой съемки.
Задачей изобретения является разработка способа съемки рельефа поверхности повышенной эффективности, позволяющего снизить временные затраты на ее проведение и себестоимость самой съемки.
Технический результат заключается в повышение скорости съемки рельефа поверхности без увеличения массо-габаритных характеристик устройства реализующего заявленный способ.
Для обеспечения указанного технического результата в известный способ съемки рельефа поверхности с помощью гидроакустических излучающей и приемной антенн, в котором гидроакустической излучающей антенной с характеристикой направленности (ХН), широкой - в плоскости наибольшего размера гидроакустической приемной антенны, и узкой - в плоскости наибольшего размера гидроакустической излучающей антенны периодически производят излучение зондирующих акустических импульсов в сторону обследуемой поверхности, обзор рельефа обследуемой поверхности в пределах сектора обзора производят пошагово-последовательно за заданное число циклов зондирования путем последовательного поворота оси узкой ХН гидроакустической излучающей антенны относительно нормали к обследуемой поверхности на угол Δα, прием эхо-сигналов от обследуемой поверхности производят гидроакустической приемной антенной, формирующей статический веер приемных ХН, производят цифровую обработку принятых эхо-сигналов в каждой ХН, сохраняют полученные данные обработки и выводят для отображения на индикатор, введены новые признаки, а именно в секторе обзора для каждого i-го дискретного углового положения узкой излучающей характеристики направленности Δα формируют собственный период акустических зондирующих импульсов Ti, рассчитанный по формуле
Ti=2*Н/(cзв×cos(Δα×i)), где
Ti - период излучения акустических зондирующих импульсов,
Η - дистанция от излучающей поверхности излучающей антенны до границы исследуемой поверхности,
сзв - скорость звука в воде,
Δα - шаг сканирования по углу в излучении, Δα=αгр/Ν1,
i - номер шага сканирования по углу в излучении, диапазон изменения от -N1 до N1,
N1 - максимальное число шагов сканирования по углу в излучении в пределах полуширины сектора обзора αгр,
αгр - угол равный полуширине сектора обзора относительно нормали к плоскости антенны,
и для каждого i-го дискретного углового положения узкой излучающей характеристики направленности синхронизируют момент излучения зондирующего акустического импульса и период приема.
Таким образом, использование при последовательно-пошаговом способе обзора рельефа поверхности в заданном секторе пространства, периода излучения, длительность которого устанавливается в зависимости от углового положения в секторе обзора излучающей характеристики направленности, позволяет уменьшить время обзора сектор пространства и тем самым повысить скорости съемки рельефа поверхности без увеличения массо-габаритных характеристик устройства, реализующего заявленный способ.
Реализация данного способа поясняется фиг. 1, 2.
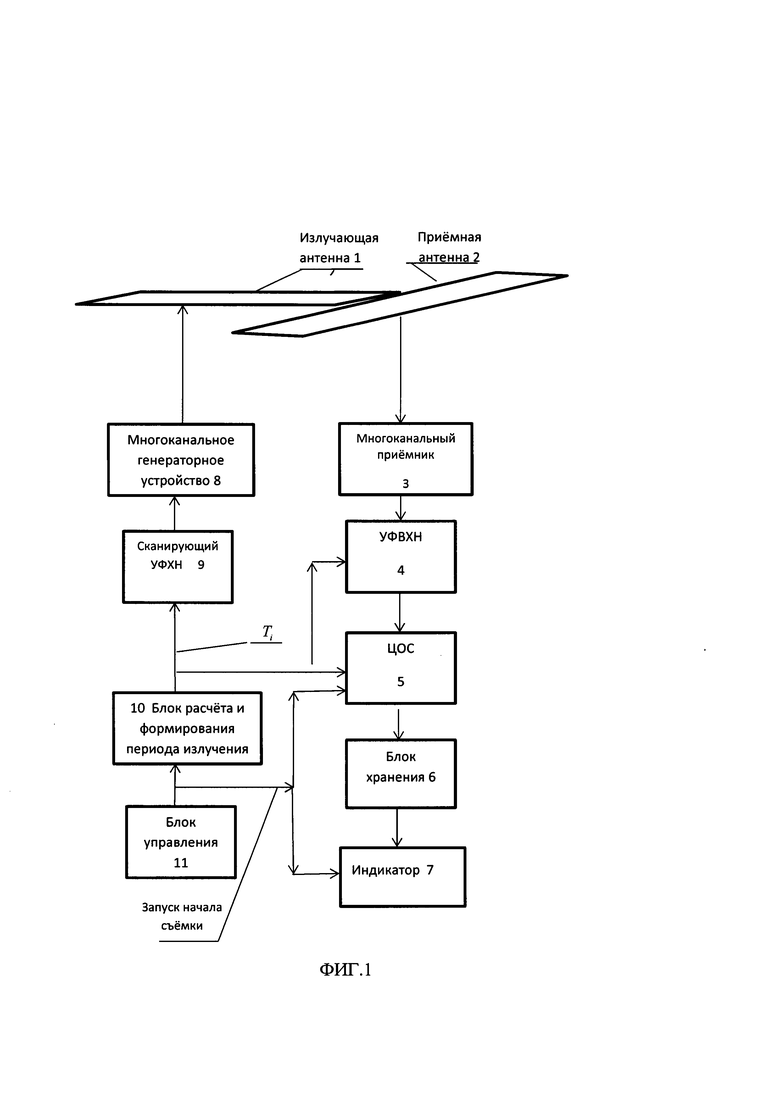
На фиг. 1 показана структурная блок-схема устройства, реализующего способ съемки рельефа поверхности, на которой представлены:
1 - Излучающая антенна,
2 - Приемная антенна,
3 - Многоканальный приемник,
4 - УФВХН - устройство формирования статического веера характеристик направленности,
5 - Блок цифровой обработки сигналов,
6 - Блок хранения результатов обработки сигналов,
7 - Индикатор,
8 - Многоканальное генераторное устройство,
9 - УФХН - сканирующее устройство формирования характеристики направленности,
10 - Блок расчета и формирования периода излучения,
11 - Блок управления.
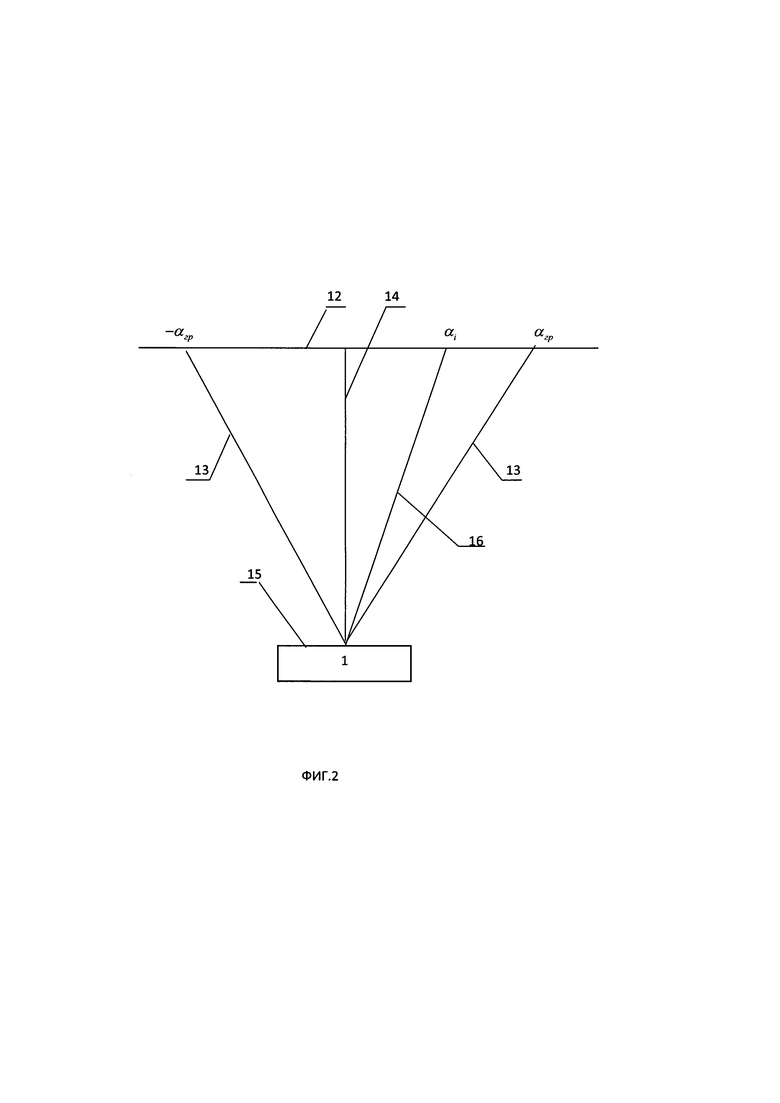
На фиг. 2 показана геометрия задачи расчета периода зондирования на i - шаге при пошагово-последовательном зондирования сектора обзора, на которой представлены в плоскости перпендикулярной плоскости излучающей антенны: 1 - излучающая антенна, 12 - граница обследуемого рельефа поверхности, 13 - границы сектора сканирования в излучении в угло-местной плоскости от -αгр до +αгр, 14 - нормаль к плоскости излучающей антенны (направление излучения), 15 - излучающая поверхность излучающей антенны 1, 16 - угловое положение излучающей характеристики направленности на i - шаге по углу αi.
Аппаратная реализация устройства, реализующего предложенный способ съемки рельефа поверхности на современном уровне развития техники, не вызывает сомнения. Приемная 1 и излучающая 2 гидроакустические антенны могут быть выполнены на основе эквидистантных линейных фазированных решеток, размещенных на общем плоском основании взаимно перпендикулярно и изготовленных из одинаковых элементов - гидрофонов, шаг установки которых одинаков (Л.В. Орлов, А.А. Шабров. Гидроакустическая аппаратура рыбопромыслового флота, Л., Судостроение, 1987 г., стр. 104-112). Многоканальный приемник 3 может быть выполнен на основе микросхем AD600 - интегральных усилителей с коэффициентом усиления управляемым напряжением для организации временной автоматической регулировки усиления (www.analog.com, ad600.pdf), а так же с применением микросхем МАХ274 для реализации полосовых фильтров и АЦП типа AD7262 для формирования комплексной огибающей эхосигналов с выходов приемной антенны 2. Устройство формирования статического веера характеристик направленности 4 возможно выполнить по схеме с фазовой компенсацией (Ю.Ф. Корякин и др., Корабельная гидроакустическая техника. Санкт-Петербург, Наука, 2004 г., стр. 251). Блок цифровой обработки эхосигналов 5 представляет собой совокупность универсальных и специальных микропроцессоров и имеет структуру многопроцессорной ЭВМ цифровой обработки сигналов с требуемым набором интерфейсов ввода-вывода. Блок хранения 6 представляет собой цифровое запоминающее устройство большого объема, например, SSD или HDD диск с необходимым интерфейсом ввода-вывода. Индикатор 7 представляет собой стандартный цифровой дисплей с требуемыми разрешением и интерфейсами связи. Совокупность блоков 5, 6, 7 может представлять собой универсальную управляемую ЭВМ для управления, обработки и отображения изображения рельефа поверхности на дисплее и интерфейсами обмена с внешними системами. Многоканальное генераторное устройство 8 представляет собой совокупность необходимого числа, по числу каналов в передающей антенне 1, усилители мощности и выполненных традиционно (Митько В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства связи и наблюдения. Л.: Судостроение, 1982, стр. 91-99). Сканирующий УФХН 9 может быть выполнен по схеме с цифровым временным методом формирования ХН в излучении (Самойлов Л.К. Электронное управление характеристиками направленности антенн. Л.: Судостроение, 1987, стр. 138-169). Блок расчета и формирования периода излучение 10 может быть выполнен на основе микропроцессора со встроенным программируемым интервальным таймером, собственно формирующим период излучения, и с набором необходимых интерфейсов ввода-вывода. Блок управления 11 так же быть выполнен на основе микропроцессора с набором необходимых интерфейсов ввода-вывода. С учетом современного развития микроэлектроники - быстродействия и многофункциональности микропроцессоров, возможно функции блоков 10 и 11 выполнить на одном высокопроизводительном микропроцессоре.
Предложенный способ с помощью устройства (фиг. 1) реализуется следующим образом: размещают устройство, реализующее заявленный способ на носителе, на пример на днище подводного необитаемого аппарата, гидроакустическая излучающая антенна 1 и гидроакустическая приемная антенна 2 расположены Т-образно и размещены на одной плоскости, при этом плоскость размещения антенн ориентируют так, чтобы нормаль к ней была направленна в сторону исследуемой поверхности, на пример в сторону дна.
Излучение акустических импульсов производят гидроакустической излучающей антенной 1 с характеристикой направленности, широкой - в плоскости наибольшего размера гидроакустической приемной антенны 2, и узкой - в плоскости наибольшего размера гидроакустической излучающей антенны 1, при этом сканирование производиться в этой же плоскости в секторе углов -αгр до +αгр относительно нормали к плоскости антенн. Обзор исследуемой поверхности в пределах сектора обзора производят за заданное число циклов зондирования путем пошагово-последовательного поворота оси ХН гидроакустической излучающей антенны 1 в плоскости ее наибольшего размера относительно нормали к ее поверхности, которое производится сканирующим УФХН 9, выходные сигналы с его выходов, усиленные многоканальным усилителем 8 поступают для излучения на гидроакустическую излучающую антенну 1.
Прием эхосигналов от исследуемой поверхности производят гидроакустической приемной антенной 2, далее многоканальный приемник 3 производит их усиление, полосовую фильтрацию и сжатие динамического диапазона, затем блок УФВХН 4 формирует статический веер из Μ-приемных ХН электронным способом, причем отдельная ХН в приеме -широкая - в плоскости наибольшего размера гидроакустической излучающей антенны, и узкая - в плоскости наибольшего размера гидроакустической приемной антенны.
Управлением синхронной работой блоков устройства осуществляет блок управления 11, при этом блок 11 задает начало съемки путем синхронизации блоков 5, 7, 10. Блок 10 по команде начала съемки от блока управления 11 начинает последовательно рассчитывать и формировать период излучения Ti в секторе обзора для каждого дискретного углового положения излучающей характеристики направленности по формуле:
Тi=2×Н/(сзв×cos(Δα×i))
Сформированные импульсы излучения, с рассчитанным периодом излучения Ti в блоке 10, с выхода блока 10 синхронизируют работу в излучении и приеме блоков 9, 4, 5 для каждого i-го углового положения излучающей ХН.
В результате пространственного перекрытия сканирующей ХН в излучении i-м цикле зондирования и статического веера приемных ХН формируется i-я полоса обзора, состоящая из Μ участков, каждый из которых является элементом разрешения по пространству. В блоке 5 цифровой обработки сигналов в i-м цикле зондирования для М-го участка i-й полосы обзора измеряют по времени задержки эхосигнала расстояние от гидроакустической приемной антенны 2 до исследуемой поверхности, принятой М-й приемной ХН. После выполнения N циклов зондирования по полученной информации об измеренных расстояниях от плоскости приемной антенны 2 до исследуемой поверхности для всех элементов разрешения Μ*Ν, блок 5 с использованием известных процедур строит рельеф исследуемой поверхности и передает результаты для хранения в блок хранения 6, откуда они поступают для отображения на индикатор 7 в виде псевдотрехмерной картины рельефа исследуемой поверхности. Значения N и Μ определяют исходя из геометрических размеров, конструкции используемых гидроакустических антенн и используемой несущей частоты излучения.
На фиг. 2 детально показана геометрия задачи расчета периода зондирования на i-шаге для углового положения 16 αi при пошагово-последовательном зондирования сектора обзора в границах 13 от -αгр до αгр.
Очевидно, что период излучения при последовательно-пошаговом зондировании сектора обзора должен быть минимально возможным и определяется граничными углами 13 сектора сканирования ±αгр и выбранной дистанцией 14 Η от излучающей поверхности 15 излучающей границы исследуемой поверхности 12, для которой период зондирования является самым минимальным из возможных, а максимальный период зондирования Tmax будет при положении по углу равным αгр излучающей ХН, будет определяться так:
Tmax=(2×Н/сзв)×(1/cosαгр).
Очевидно, построение рельефа исследуемой поверхности производится относительно границы поверхности 12 на фиг. 2, то для положения излучающей характеристики направленности по углу, равного αi текущий период излучения Ti можно определить так:
Ti=Tmin/cos(αi)=Tmin/cos(Δα×i),
то есть период излучения является функцией угла сканирования αi.
Тогда временной выигрыш при предложенном способе формирования периода излучения

Для сектора обзора с граничным углом αгр=45° при ширине излучающей ХН, равной Δα=1°, значения скорости звука в воде сзв=1500 с/сек, Тmax=1 сек, Tmin=0.7 сек и числе положений по углу излучающей ХН N=90, временной выигрыш составит около 18.3 сек или около 20,3%, что является существенным временным выигрышем без увеличения аппаратных затрат.
Значение прироста производительности съемки будет определяться угловыми размерами ХН используемых гидроакустических антенн, числом выполненных циклов зондирования N, значениями углов сектора сканирования, выбранной дистанцией H и значением скорости звука в воде.
Таким образом, производительность предложенного способа больше по сравнению с известным способом-прототипом.
Предложенный способ позволяет повысить производительность съемки рельефа поверхности без увеличения аппаратных затрат так, как излучение и прием эхосигналов ведется на одной несущей частоте,
а процедура вычисление и формирования переменного периода излучение может быть выполнена программным способом и выполняться микропроцессором блока управления. Так же предложенный способ позволяет производит съемку рельефа поверхности в пределах сектора сканирования при нулевой скорости за счет того, что производится активное сканирование этого сектора узкой характеристикой направленности, а не путем движения носителя с установленным устройством, реализующим заявленный способ.
Таким образом, технический результат изобретения достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ съемки рельефа дна акватории | 2021 |
|
RU2757560C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ЛЕДОВОГО ПОЛЯ | 2014 |
|
RU2559311C1 |
| Устройство для съемки рельефа дна акватории | 2018 |
|
RU2703786C1 |
| Многолучевой эхолот автономного необитаемого подводного аппарата | 2021 |
|
RU2759497C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| Способ определения состояния ледяного покрова | 2016 |
|
RU2635332C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И ОСАДКИ ПОДВОДНОЙ ЧАСТИ АЙСБЕРГА | 2016 |
|
RU2623830C1 |
| Устройство для съемки подводной поверхности айсберга | 2021 |
|
RU2771434C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2013 |
|
RU2541435C1 |
Использование: изобретение относится к области гидроакустической техники и может быть использовано для съемки рельефа поверхности дна и/или нижней кромки льда в реальном масштабе времени даже при нулевой скорости движения носителя, на котором установлено оборудование, реализующее заявленный способ. Сущность: способ реализуют путем формирования периода излучения при последовательно-пошаговом обзоре сектора пространства, зависящим от углового положения излучающей характеристики направленности в секторе обзора. Технический результат: повышение скорости съемки рельефа поверхности без увеличения массо-габаритных характеристик устройства, реализующего заявленный способ. 2 ил.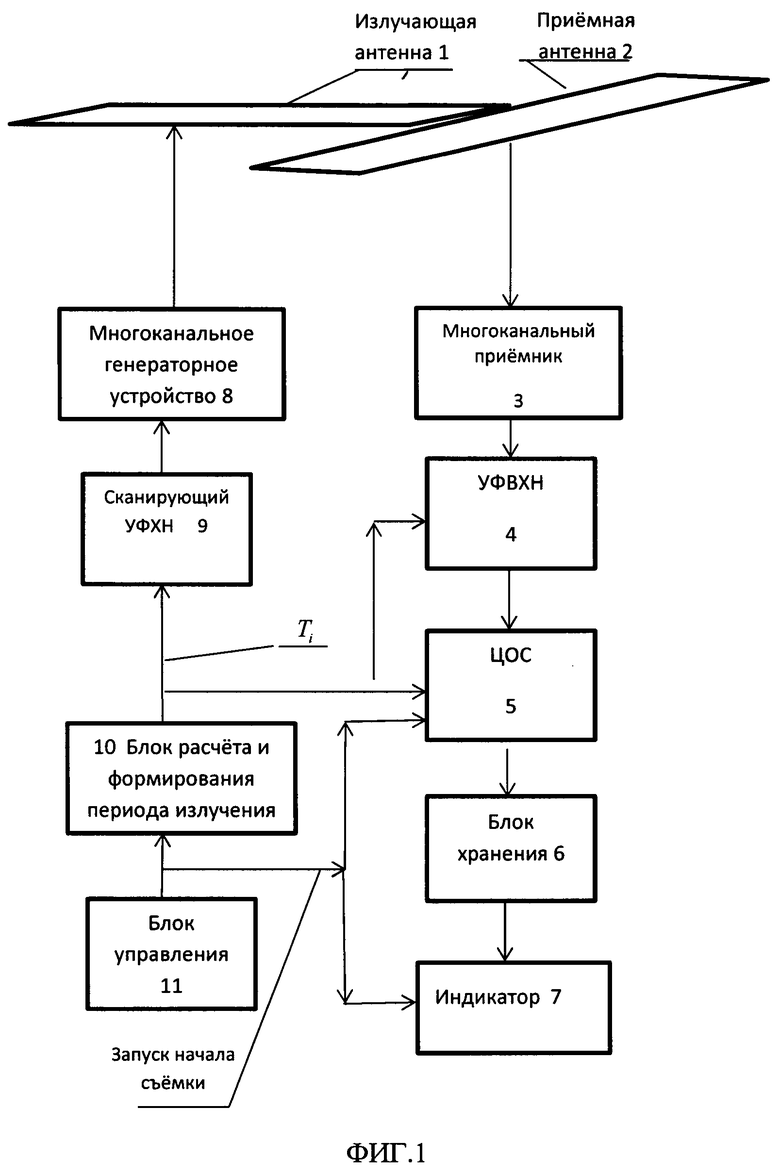
Способ съемки рельефа поверхности с помощью гидроакустических излучающей и приемной антенн, в котором гидроакустической излучающей антенной с характеристикой направленности (ХН), широкой - в плоскости наибольшего размера гидроакустической приемной антенны, и узкой - в плоскости наибольшего размера гидроакустической излучающей антенны, периодически производят излучение зондирующих акустических импульсов в сторону обследуемой поверхности, обзор рельефа обследуемой поверхности в пределах сектора обзора производят пошагово-последовательно за заданное число циклов зондирования путем последовательного поворота оси узкой ХН гидроакустической излучающей антенны относительно нормали к обследуемой поверхности на угол Δα, прием эхо-сигналов от обследуемой поверхности производят гидроакустической приемной антенной, формирующей статический веер приемных ХН, производят цифровую обработку принятых эхо-сигналов в каждой ХН, сохраняют полученные данные обработки и выводят для отображения на индикатор, отличающийся тем, что в секторе обзора для каждого i-го дискретного углового положения узкой излучающей характеристики направленности Δα формируют собственный период акустических зондирующих импульсов Ti, рассчитанный по формуле
Тi=2*Н/(сзв×cos(Δα×i), где
Ti - период излучения акустических зондирующих импульсов,
Н - дистанция от излучающей поверхности излучающей антенны до границы исследуемой поверхности,
сзв - скорость звука в воде,
Δα - шаг сканирования по углу в излучении, Δα=αгр/Ν1,
i - номер шага сканирования по углу в излучении, диапазон изменения от -N1 до Ν1,
N1 - максимальное число шагов сканирования по углу в излучении в пределах полуширины сектора обзора αгр,
αгр - угол, равный полуширине сектора обзора относительно нормали к плоскости антенны,
и для каждого i-го дискретного углового положения узкой излучающей характеристики направленности синхронизируют момент излучения зондирующего акустического импульса и период приема.
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ЛЕДОВОГО ПОЛЯ | 2014 |
|
RU2559311C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛЬДА | 2014 |
|
RU2559159C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И ОСАДКИ ПОДВОДНОЙ ЧАСТИ АЙСБЕРГА | 2016 |
|
RU2623830C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| Устройство для съемки рельефа дна акватории | 2018 |
|
RU2703786C1 |
| US 5790474 A1, 04.08.1998. | |||

