Изобретение относится к области гидроакустики, а именно к пассивной гидролокации, использующей бортовые, буксируемые и стационарные протяженные и разнесенные антенны, и может быть использовано в ближней зоне излучения источника с круговым (сферическим, цилиндрическим) волновым фронтом, а также в атмосферной акустике и пассивной радиолокации.
При пассивной гидролокации (ПГЛ) источников гидроакустического излучения в ближней зоне поля источника (зоне Френеля) используют протяженные (широкоапертурные) приемные системы (ПС) из М (М≥3) гидроакустических приемников или разнесенных направленных локальных антенн (далее «антенн ПС»). Средства предварительной и межантенной пространственно-временной обработки информации (МА ПВО) обеспечивают двух-координатный обзор в заданном секторе направлений α и интервале дальностей D на индикаторе с координатной сеткой <α, D> [Гампер Л.Е. Оптимальная пространственно-временная обработка в системах пассивной гидролокации с разнесенными антеннами // Научно-техн. сб. Гидроакустика. Вып. 10 СПб., 2009. С. 49-60]. Эти средства обеспечивают наблюдение «полезного» сигнала источника излучения S в виде «сигнальной отметки», обусловленной «откликом» приемной системы на его сигнал на фоне выбросов помехи, с «главным (глобальным)» максимумом, обеспечивающим считывание искомых координат источника излучения αS, DS на шкалах α, D [Патент РФ №2507531, регистрация в Госреестре 20.02.2014.]. МА ПВО включает «фокусирование» приемной системы в точку предполагаемого расположения источника путем компенсации разности времен прихода сигнала от источника S к центрам антенн ПС («фазирования» антенн) и определения квадрата модуля суммы этих сигналов. Другим методом МА ПВО, применяемым для точного отсчета и автосопровождения координат источника излучения, является использование дискриминации отклонения текущих значений оценок направления α*(t) и дальности D*(t) от их опорных значений αоп(t) и дальности Don(t), заданных или отслеженных по предыдущим измерениям, системой [Лоскутова Г.В., Полканов К.И. Пространственно-частотные и частотно-волновые методы описания и обработки гидроакустических полей. СПб.: «Наука». 2007].
Определение дальности в ближней зоне связано со специфической сложностью. Она заключается в том, что главный и боковые максимумы отклика сфокусированной приемной системы zmax(α, D) в зоне Френеля обладают свойством асимметричного расширения в дальностном сечении zmax(D, αs=const) при увеличении измеряемого параметра D [Le Cadre J.P. Performance Analysis of Wavefront Curvature Methods for Range Estimation. IEEE Trans, on Aerospace and Electronic. Vol. 31, No. 3, july 1995. P. 1082-1103]. Это асимметричное расширение при малых дальностях невелико, но на больших расстояниях быстро увеличивается, ухудшая точность определения координаты и разрешение источников по дальности при Ds>>ВПС, где Ds - дальность до источника, ВПС - базовый размер ПС (расстояние между центрами крайних антенн ПС). При расширении главного максимума отклика уменьшается также крутизна дискриминационной характеристики (зависимость выходного значения дискриминатора от величины искомого отклонения, т.е. чувствительность), т.к. она пропорциональна его производной, следовательно, увеличивается погрешность σD оценки дальности и ее зависимость от измеряемого параметра Ds. Это свойство асимметричного расширения дальностного сечения отклика приемной системы, уменьшения крутизны дискриминационной характеристики дальности и увеличения погрешности со оценки дальности является объективным [Статья Le Cadre J.P.], «геометрической» особенностью пространственной избирательности приемной системы в ближней зоне [Schultheiss P.M. Passive Sonar Detection in the presence of Interference // Jorn. Acoust. Soc. Am. 1968. V. 43. Р. 418-425]. При этом сечение по направлению не зависит от дальности, аналогично характеристике направленности антенны в дальней зоне. Целью предлагаемого технического решения является повышение точности определения дальности до источника излучения на любом расстоянии в интервале наблюдения в ближней зоне путем уменьшения «геометрической» зависимости крутизны дискриминационной характеристики от измеряемого параметра - дальности.
Известен способ определения угла прихода плоско-волнового фронта сигнала движущегося источника в дальней зоне двухканальной приемной системой [Лоскутова Г.В. и др.]. Для этого используются измерительные устройства, содержащие дискриминаторы измеряемого параметра и динамические сглаживающие устройства. В этом способе используют приемную систему из двух антенн или антенну со сформированными на ней двумя (или более) каналами с фазовыми центрами, разнесенными на расстояние dф (например, центрами двух половин антенны). Антенны каналов компенсируют (фазируют) независимо, в одном назначенном опорном направлении αоп и, для определения искомого неизвестного направления αs измеряют величину и знак отклонения опорного направления αоп от искомого неизвестного αs, используя сигналы обоих каналов, а потом корректируют опорное направление на величину измеренного отклонения δα. Особенностью этого метода дискриминации является то, что ее характеристика (ДХ)  пропорциональна производной характеристики направленности (ХН) антенны z(α,αоп). Главный максимум ХН - приблизительно симметричная функция относительно αоп, с максимумом в точке (α=αоп), следовательно ДХ - антисимметричная функция с нулевым значением в точке (α=αоп). Линейный (приблизительно, «квазилинейный») участок в окрестностях нулевого значения используется для измерения отклонения δα с использованием крутизны ДХ:
пропорциональна производной характеристики направленности (ХН) антенны z(α,αоп). Главный максимум ХН - приблизительно симметричная функция относительно αоп, с максимумом в точке (α=αоп), следовательно ДХ - антисимметричная функция с нулевым значением в точке (α=αоп). Линейный (приблизительно, «квазилинейный») участок в окрестностях нулевого значения используется для измерения отклонения δα с использованием крутизны ДХ: 

Недостатки этого способа заключаются в том, что, во-первых в нем используют информацию только двух приемных каналов, в то время как пассивное определение дальности по кривизне волнового фронта в круговом поле возможно лишь при М≥3, во-вторых он может быть использован только для определения одной координаты - угла прихода сигнала с плоским волновым фронтом, а целью пассивной гидролокации является определение и направления и дальности, в общем случае также и угла места. Для определения координат источника излучения, в том числе дальности при приеме сигнала с круговым (сферическим, цилиндрическим) волновым фронтом, этот метод не может быть использован, но сам метод дискриминации отклонения, как показано ниже, применен и в прототипе и в предлагаемом способе, с необходимыми изменениями и новыми признаками, для определения как направления, так и дальности.
Для уменьшения зависимости крутизны характеристики дискриминатора от измеряемого параметра - дальности необходимо выбрать некоторые параметры модели системы <источник/ приемники ПС> и способ их деформации в нужном направлении для преобразования формы ДХ, обеспечивающего стабилизацию ее крутизны в необходимом интервале дальностей D.
Известны методы изменения с какой-либо целью формы графического изображения объекта на индикаторной картине по принципу «кривого зеркала»: путем изменения линейного масштаба изображения по той или иной оси графика по заданному нелинейному правилу. Известным примером этого метода является логарифмическая шкала, когда график z(x) с линейной шкалой х заменяют графиком  , при этом значения распределяются на шкале нелинейно и не эквидистантно, что в некоторых случаях неудобно наблюдателю. Другим примером этого метода является замена графика z(x) с линейной шкалой х, графиком z'(x-1), в котором помечены деления шкалы х-1 соответствующими значениями х с неравномерным шагом (что также не всегда удобно на практике). Этот метод частично решает одну из поставленных выше задач, позволяя получить дискриминационную характеристику приблизительно одинаковой крутизны в окрестностях нулевого отклонения х - х0=0, однако, это не улучшает точности определения параметра х, т.к. сама зависимость (уже измеренная) при этом не меняется, а лишь графически деформируется.
, при этом значения распределяются на шкале нелинейно и не эквидистантно, что в некоторых случаях неудобно наблюдателю. Другим примером этого метода является замена графика z(x) с линейной шкалой х, графиком z'(x-1), в котором помечены деления шкалы х-1 соответствующими значениями х с неравномерным шагом (что также не всегда удобно на практике). Этот метод частично решает одну из поставленных выше задач, позволяя получить дискриминационную характеристику приблизительно одинаковой крутизны в окрестностях нулевого отклонения х - х0=0, однако, это не улучшает точности определения параметра х, т.к. сама зависимость (уже измеренная) при этом не меняется, а лишь графически деформируется.
Известны также методы определения координат движущегося источника излучения путем динамической обработки последовательности измерения направления на него [Кузьмин С.З. Цифровая обработка радиолокационной информации. М.: Сов. радио. 1967]. В них часто используется прием оценки не самого искомого параметра - дальности D, а параметра R=D-1, что позволяет упростить решение задачи с меньшими вычислительными ресурсами. Недостатки этих методов: использование только измерений направления, большое время решения задачи, необходимость гипотезы о характере траектории источника и др.
Наиболее близким по совокупности общих признаков к предлагаемому техническому решению является «Способ пассивного определения координат движущегося источника излучения» [Патент РФ №2623831, опубликовано 29 июня 2017 г.], содержащий прием сигналов с круговым волновым фронтом приемной системой (ПС) из М антенн (М≥3), расположенных в пространстве известным образом, предварительную и меж-антенную пространственно-временную обработку, индикатор с двух-координатной сеткой и шкалами направления α и дальности D, отображающими расположение источников излучения в поле наблюдения в виде сигнальных отметок. Для точного определения координат и сопровождения назначают опорную точку (ОТ) с координатами αоп и Dоп, которые в момент наведения принимают равными: αоп(t0)=αmax(t0) и Dоп(t0)=Dmax(t0) а далее, в процессе их сопровождения, корректируют и прогнозируют известными методами динамического сглаживания оценок [Кузьмин С.З., монография].
На каждом i-м цикле ДПФ по принятым антеннами сигналам определяют оценки отклонения δαi, δDi координат ОТ от искомых текущих координат αs(ti), Ds(ti) источника соответственно, для чего фазируют каждую m-ю антенну в направлении от ее центра на ОТ и формируют mn-е пары антенн, с m, n=1, …, М, при m<n, всего (М2-М)/2=Мп пар с неповторяющимися индексами mn. Для каждой mn-й пары антенн измеряют попарные взаимные спектры плотности мощности (ПВСПМ) сигналов. Последующие этапы определения оценок отклонений направления δαi и дальности αDi в прототипе различны. Угловые сечения отклика ПС, подобно характеристикам направленности антенн в дальнем поле, симметричны относительно направления фазирования и в первом приближении мало зависят от направления и дальности, а дискриминационная характеристика отклонения направления (ДХН) приблизительно антисимметрична относительно нулевого значения при αопi=αSi. Поэтому для дискриминации δαi используют известный метод [Лоскутова Г.В. и др., монограйфия], включающий: вычисление разностей τmni времен прихода сигнала из точки S к центрам каждой mn-й пары антенн и весовых коэффициентов  . Определяют значение «измерительной» части ДХН - с1, суммируя по частоте значения ПВСПМ каждой пары с умножением на частотную характеристику приемного тракта по выходу предварительной обработки hk, на коэффициент exp(-j2πƒτmni) компенсации разности времен прихода сигнала mn-й пары антенн и на частоту ƒk, затем суммируя результаты всех пар антенн с весовыми коэффициентами wamni. Аналогично определяют значение «нормирующей» части ДХН - c2, только в первой сумме слагаемые умножают на квадрат частоты, а во второй - на квадрат wamni. Таким образом, получают значение отклонения направления δai=c1/c2, в единицах измеряемого параметра, а оценку направления на i-м цикле ДПФ определяют как:
. Определяют значение «измерительной» части ДХН - с1, суммируя по частоте значения ПВСПМ каждой пары с умножением на частотную характеристику приемного тракта по выходу предварительной обработки hk, на коэффициент exp(-j2πƒτmni) компенсации разности времен прихода сигнала mn-й пары антенн и на частоту ƒk, затем суммируя результаты всех пар антенн с весовыми коэффициентами wamni. Аналогично определяют значение «нормирующей» части ДХН - c2, только в первой сумме слагаемые умножают на квадрат частоты, а во второй - на квадрат wamni. Таким образом, получают значение отклонения направления δai=c1/c2, в единицах измеряемого параметра, а оценку направления на i-м цикле ДПФ определяют как:  .
.
Для упрощения описания (без потери существа рассматриваемых признаков) условимся считать, что крутизна нормированной ДХ не зависит от уровня сигнала (поддерживается независимой регулировкой мощности источника излучения), а средне-квадратическое отклонение (СКО) флуктуаций выходного значения дискриминатора определяется отношениями сигнал/помеха на выходах антенн, которые для упрощения примем постоянным и одинаковым на всех антеннах ПС.
В отличие от направления, дальностные сечения отклика ПС не симметричны и их форма и ширина главного максимума сильно зависят от дальности, точнее от отношения DS/B, где В - размер базы ПС. Соответственно и дискриминационная характеристика дальности (ДХД) не является антисимметричной кривой, и ее крутизна на линейном участке зависит от дальности, быстро уменьшаясь с увеличением DS/B, в связи с чем, использовать тот же алгоритм определения отклонения по дальности, что и по направлению не целесообразно. Поэтому в прототипе предложено измерять не отклонение δDi, а искать точку пересечения ДХ  оси дальностей D, иначе говоря искать нулевую точку ДХ на оси D в окрестностях Dопi. Для этого сканируют величину D в окрестностях Dопi, используя Мп нечетных попарных взаимно-корреляционных функций (НВКФ) сигналов антенн, комплексное накопление и обратное преобразование Фурье.
оси дальностей D, иначе говоря искать нулевую точку ДХ на оси D в окрестностях Dопi. Для этого сканируют величину D в окрестностях Dопi, используя Мп нечетных попарных взаимно-корреляционных функций (НВКФ) сигналов антенн, комплексное накопление и обратное преобразование Фурье.
Преимущество этого способа заключается в повышении точности определения координат движущегося источника излучения благодаря использованию дискриминационного метода оценок координат (нулевой отсчет) и уменьшения ошибок, связанных с «инерционностью» статического осреднения, зависящих от скорости относительного перемещения источника и приемников. К недостаткам способа следует отнести «геометрическую» зависимость погрешности определения дальности σD от величины измеряемой дальности из-за уменьшения крутизны характеристики дискриминатора дальности ΔD с увеличением ее значения DS.
Задачей изобретения является повышение точности определения дальности до источника излучения пассивным гидролокатором в ближней зоне поля движущегося источника излучения в интервале наблюдения, путем уменьшения «геометрической» зависимости крутизны дискриминационной характеристики дальности от измеряемого параметра.
Техническим результатом предлагаемого изобретения является обеспечение дискриминации отклонения оценки дальности с характеристикой, квазиинвариантной к значению дальности в заданном интервале наблюдения пассивного гидролокатора, что приводит к повышению точности определения дальности, особенно при больших значениях отношения дальности D к базовому размеру ПС: D/ВПС.
Для обеспечения указанного технического результата в способ пассивного определения координат движущегося источника излучения, содержащий прием сигналов М антеннами пассивного гидролокатора, М≥3, предварительную обработку, включающую усиление, фильтрацию с частотной характеристикой hk в полосе приема ƒн≤ƒk≤ƒв, синхронную дискретизацию, цифровое преобразование, циклическое дискретное преобразование Фурье (ДПФ), средства обзора в заданном угловом секторе наблюдения и интервале дальностей, определение координат обнаруженной сигнальной отметки на индикаторе обзора  , которые на момент начала работы средств точного определения координат и сопровождения используют как опорную точку (ОТ) с координатами
, которые на момент начала работы средств точного определения координат и сопровождения используют как опорную точку (ОТ) с координатами  , а для определения и сопровождения текущего направления на движущийся источник излучения
, а для определения и сопровождения текущего направления на движущийся источник излучения  фазируют каждую m-ю антенну в направлении от ее центра на опорную точку (ОТ) и на каждом i-ом цикле ДПФ измеряют комплексные попарные взаимные спектры плотности мощности (ПВСПМ) сигналов всех mn-х пар антенн приемной системы (m,n=1,…, М), используют дискриминацию текущих отклонений направления от опорной точки αопi и известные методы динамического сглаживания последовательности оценок
фазируют каждую m-ю антенну в направлении от ее центра на опорную точку (ОТ) и на каждом i-ом цикле ДПФ измеряют комплексные попарные взаимные спектры плотности мощности (ПВСПМ) сигналов всех mn-х пар антенн приемной системы (m,n=1,…, М), используют дискриминацию текущих отклонений направления от опорной точки αопi и известные методы динамического сглаживания последовательности оценок  введены следующие новые признаки:
введены следующие новые признаки:
для определения текущего значения дальности пассивным гидролокатором на каждом i-м цикле ДПФ используют дискриминацию отклонения ее опорного значения дальности Dопi от искомого истинного DSi, применяя при этом нелинейную шкалу дальностей rф до виртуальных точек фокусировки приемной системы с координатами <αопi, rф>, для этого на линейной шкале дальности D назначают заранее нижнюю границу Dфн интервала дальностей, в котором предположительно будет перемещаться источник излучения в процессе наблюдения и сопровождения: D≥Dфн. Верхняя граница определяется только валидностью применения метода кривизны волнового фронта в данных конкретных условиях - мощностью источника, отношением сигнал/помеха, гидрологией, техническим уровнем чувствительности к фазовым соотношениям сигналов антенн ПС и пр.). На каждом очередном i-м цикле ДПФ назначают виртуальную опорную точку фокусировки приемной системы Rопi с координатами <αопi, rопi>, таким образом, что направление на Rопi совпадает с αопi, а дальность rопi связана с Dопi нелинейной зависимостью:  где γф - масштабный коэффициент, равный квадрату нижней границы Dфн:
где γф - масштабный коэффициент, равный квадрату нижней границы Dфн:  , и определяют величину и знак отклонения δRi текущего опорного значения rопi от искомого значения дальности до виртуального источника, а текущую оценку фактической дальности на i-м цикле ДПФ определяют как
, и определяют величину и знак отклонения δRi текущего опорного значения rопi от искомого значения дальности до виртуального источника, а текущую оценку фактической дальности на i-м цикле ДПФ определяют как  и подвергают последующему динамическому осреднению известными методами определения параметров последовательных измерений и прогноза их значений на следующие циклы измерений.
и подвергают последующему динамическому осреднению известными методами определения параметров последовательных измерений и прогноза их значений на следующие циклы измерений.
Для определения величины и знака отклонения δгi текущего опорного значения rопi от искомого значения дальности до виртуального источника  , используют дискриминацию отклонения дальности. Для этого рассчитывают разность времен распространения сигнала tmRi из виртуальной точки Rопi(αопi, rопi) к центрам Om, On каждой mn-й пары антенн: τmnRi=tmRi-tnRi (m, n=1,…, М) по формулам тригонометрии, используя скорость звука в среде с, а также весовые коэффициенты wrmni, равные производной разности времен распространения τmnRt no ri, т.е.
, используют дискриминацию отклонения дальности. Для этого рассчитывают разность времен распространения сигнала tmRi из виртуальной точки Rопi(αопi, rопi) к центрам Om, On каждой mn-й пары антенн: τmnRi=tmRi-tnRi (m, n=1,…, М) по формулам тригонометрии, используя скорость звука в среде с, а также весовые коэффициенты wrmni, равные производной разности времен распространения τmnRt no ri, т.е.  , суммируют по частоте ƒk мнимые части ПВСПМ каждой mn-й пары антенн в полосе приема [ƒн, ƒв] с умножением каждого слагаемого на коэффициент частотной характеристики hk, на частоту ƒk и на коэффициент ekmni=exp(-j2πƒkτmnRi) компенсации разности времен распространения сигнала от опорной виртуальной точки Rфi к центрам каждой mn-й пары антенн, в результате получают для каждой mn-й пары суммарные величины Cmni i-го цикла ДПФ, затем суммируют по частоте ƒk вещественные части ВСПМ с умножением каждого слагаемого на hk, на коэффициент компенсации ekmni и на квадрат частоты
, суммируют по частоте ƒk мнимые части ПВСПМ каждой mn-й пары антенн в полосе приема [ƒн, ƒв] с умножением каждого слагаемого на коэффициент частотной характеристики hk, на частоту ƒk и на коэффициент ekmni=exp(-j2πƒkτmnRi) компенсации разности времен распространения сигнала от опорной виртуальной точки Rфi к центрам каждой mn-й пары антенн, в результате получают для каждой mn-й пары суммарные величины Cmni i-го цикла ДПФ, затем суммируют по частоте ƒk вещественные части ВСПМ с умножением каждого слагаемого на hk, на коэффициент компенсации ekmni и на квадрат частоты  получая для каждой пары суммарную величину Gmni, затем суммируют по индексу mn величины Cmni с весовыми коэффициентами wrmni, получая величину ci, которую делят на сумму по индексу mn величин Gmnt с тем же весовым коэффициентом в квадрате
получая для каждой пары суммарную величину Gmni, затем суммируют по индексу mn величины Cmni с весовыми коэффициентами wrmni, получая величину ci, которую делят на сумму по индексу mn величин Gmnt с тем же весовым коэффициентом в квадрате  , получая величину gi и определяют отклонение δri=ci/gi, выполняют осреднение оценок отклонения δri по i=1, 2, …, I циклам ДПФ, получая малоосредненную оценку
, получая величину gi и определяют отклонение δri=ci/gi, выполняют осреднение оценок отклонения δri по i=1, 2, …, I циклам ДПФ, получая малоосредненную оценку  , а текущую оценку фактической дальности на i-м цикле ДПФ определяют как
, а текущую оценку фактической дальности на i-м цикле ДПФ определяют как  .
.
Введение новых признаков позволяет повысить точность определения дальности до движущегося источника излучения пассивным гидролокатором на больших дальностях путем обеспечения высокой крутизны дискриминационной характеристики дальности (ДХД) - на уровне ее значения в заданной нижней границе интервала наблюдения Dфн, и ее стабилизации на любом расстоянии в интервале ближней зоны. Масштаб угловых сечений при этом не меняется. Новизна предлагаемого решения заключается в том, что при формировании дискриминационной характеристики используют нелинейный масштаб в дальностных сечениях, вида:  . Этот масштаб обладает следующими свойствами: фактически, при любой дальности D в интервале D=Dфн÷∞ дискриминационная характеристика дальности формируется с использованием значений расстояния в интервале rф=0÷Dфн, где велика крутизна ДХД, и при этом сохраняется тождество*):
. Этот масштаб обладает следующими свойствами: фактически, при любой дальности D в интервале D=Dфн÷∞ дискриминационная характеристика дальности формируется с использованием значений расстояния в интервале rф=0÷Dфн, где велика крутизна ДХД, и при этом сохраняется тождество*):  , т.е. нулевое значение виртуальной ДХД на основной, линейной шкале дальностей D всегда находится в точке фактического расположения источника излучения DS, а ее крутизна близка к крутизне на дальности rфн, даже несколько увеличиваясь с увеличением фактической дальности DS. Предложенный выбор нелинейности использует особенность геометрии фрагмента дуги радиуса Rд, стянутого хордой Lд: высота его сегмента hд равна:
, т.е. нулевое значение виртуальной ДХД на основной, линейной шкале дальностей D всегда находится в точке фактического расположения источника излучения DS, а ее крутизна близка к крутизне на дальности rфн, даже несколько увеличиваясь с увеличением фактической дальности DS. Предложенный выбор нелинейности использует особенность геометрии фрагмента дуги радиуса Rд, стянутого хордой Lд: высота его сегмента hд равна:  , где αц - центральный угол дуги. Применяя метод приближенных вычислений при Rд>>Lд/2, можно получить:
, где αц - центральный угол дуги. Применяя метод приближенных вычислений при Rд>>Lд/2, можно получить:  , где ηд - коэффициент, определяемый геометрией схемы <дуга/радиус>:
, где ηд - коэффициент, определяемый геометрией схемы <дуга/радиус>:  . Применяя эту нелинейную зависимость в расчетах коэффициента компенсации разности времен распространения сигнала от опорной виртуальной точки Rфi к центрам каждой mn-й пары антенн ekmni=exp(-j2πƒkτmnRi) получают стабильную форму главного максимума отклика ПС и ДХД.
. Применяя эту нелинейную зависимость в расчетах коэффициента компенсации разности времен распространения сигнала от опорной виртуальной точки Rфi к центрам каждой mn-й пары антенн ekmni=exp(-j2πƒkτmnRi) получают стабильную форму главного максимума отклика ПС и ДХД.
*) Примечание: Обратим внимание, что при переходе от прямой фокусировки в точку S к фокусировке в виртуальную точку Rф знак ДХД меняется на обратный (см. фиг.5).
Сущность предполагаемого изобретения поясняется фигурами 1-5:
Фиг. 1 геометрическая схема системы «источник-антенны» для пассивного гидролокатора с тремя антеннами.
Фиг. 2 графики, поясняющие соотношения дальностей до точек фокусировки приемной системы при реальных (прототип) и виртуальных (предлагаемых) положениях источника излучения.
Фиг. 3 схема пассивного гидролокатора, решающего задачу определения дальности предлагаемым способом.
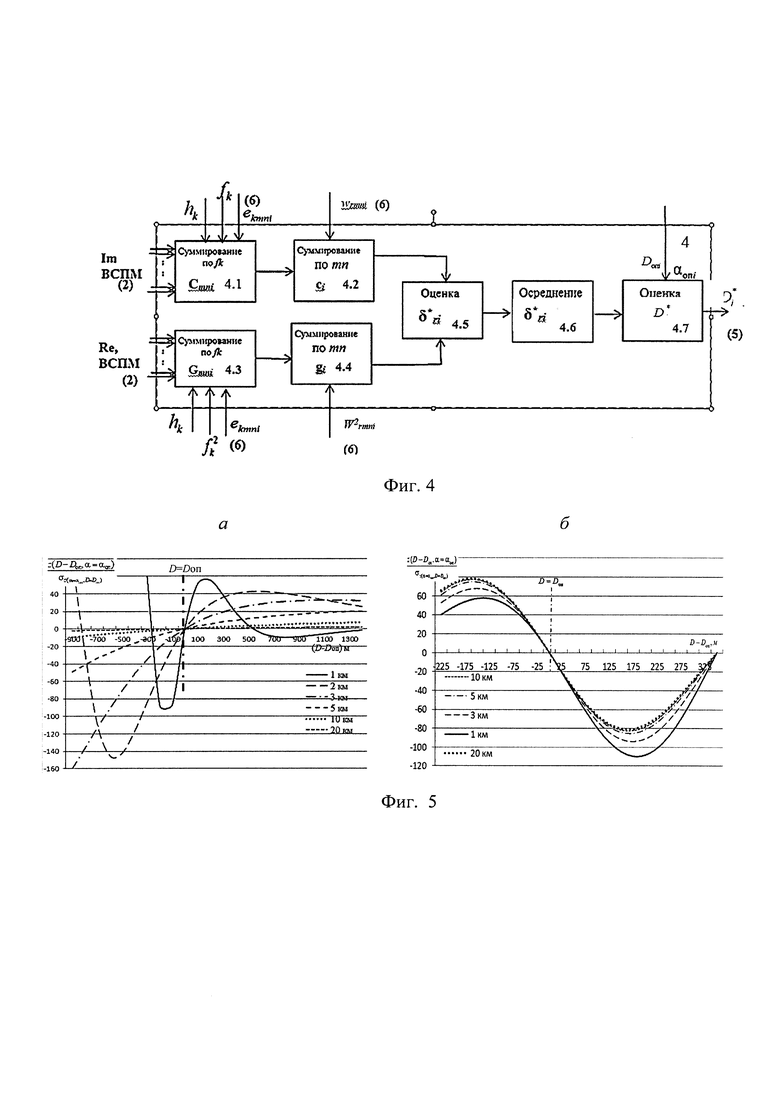
Фиг. 4 схема блока 4 определения дальности до источника излучения предлагаемым способом.
Фиг. 5 графики дискриминационных характеристик отклонений дальности от опорной точки при использовании традиционного и предлагаемого способов дискриминации в интервале дальностей, фиг. а) по способу-прототипу, б) по предлагаемому способу.
Принцип действия предполагаемого изобретения можно пояснить на примере, реализующем решение двух-координатной задачи с тремя линейно расположенными антеннами А1, А2, А3, как показано на схеме Фиг. 1. где O1, О2, О3 - центры антенн ПС, S - источник излучения с координатами (αs, Ds), Dфн/Rфн - общая точка линейной шкалы D и нелинейной R с координатами (αs, rфн).
На графиках фиг. 2 показано соотношения дальностей до точек фокусировки приемной системы в реальных Dф (прототип) и виртуальных rф (предлагаемых) положениях источника излучения, Ds - положение некоторого источника S на линейной шкале Dф, rфS - положение его же на нелинейной шкале rф.
Предлагаемый способ может быть реализован с помощью устройства (пассивного гидролокатора), схемы которого представлены на фиг. 3, 4. Устройство (фиг. 3), содержит известные блоки и модули по предлагаемому способу: блок приемной системы 1 из М антенн 1.1 + 1.М, в блоке 2: модуль фазирования 2.1 (известными методами предварительной обработки и формирования направленности антенн) и модуль измерения взаимных спектров плотности мощности (ВСПМ) с выходов всех пар антенн - модуль 2.2, блоки определения малоосредненных оценок: направления  - блок 3 (например, по Патенту РФ №2623831) и дальности
- блок 3 (например, по Патенту РФ №2623831) и дальности  - блок 4 (по предлагаемому способу), блок динамического сглаживания 5 (программируемый процессор), вычислитель 6 (программируемый процессор), блок управления 7 (программируемый контроллер), индикатор 8 и блок обзора 9 (например, по Патенту РФ №2507531).
- блок 4 (по предлагаемому способу), блок динамического сглаживания 5 (программируемый процессор), вычислитель 6 (программируемый процессор), блок управления 7 (программируемый контроллер), индикатор 8 и блок обзора 9 (например, по Патенту РФ №2507531).
Блок 1 включает М антенн, а также элементы предварительной обработки, управляемые из блока 7: синхронную дискретизацию с частотой  , цифровое преобразование, циклическое дискретное преобразование Фурье (ДПФ) выборок объема NДПФ сигналов с выходов антенн.
, цифровое преобразование, циклическое дискретное преобразование Фурье (ДПФ) выборок объема NДПФ сигналов с выходов антенн.
Блок 2 включает модуль 2.1 фазирования антенн в направлениях от центра антенны на опорную точку (ОТ) αmопi, m=1÷М, и модуль 2.2 формирования Мп пар mn-х антенн и определения комплексных взаимных спектров плотности мощности (ВСПМ) их сигналов. Координаты ОТ поступают из блока 6 (вычислитель) по результатам динамического сглаживания оценок координат  и их производных
и их производных  в блоке 5.
в блоке 5.
Блоки 3 и 4 реализуют оценки текущих направления  (известным способом, например, по Патенту РФ №2623831) и дальности
(известным способом, например, по Патенту РФ №2623831) и дальности  (предлагаемым способом), соответственно, путем измерения отклонений координат источника излучения δαi, δri от координат виртуальной опорной точки Rфопi. Для этого в эти блоки поступают измерения ВСПМ Мп пар антенн (Re и Im) из блока 2, коэффициенты компенсации разностей задержек сигнала в парах антенн ekmni=exp(-j2πƒkτmnRi) и весовые коэффициенты
(предлагаемым способом), соответственно, путем измерения отклонений координат источника излучения δαi, δri от координат виртуальной опорной точки Rфопi. Для этого в эти блоки поступают измерения ВСПМ Мп пар антенн (Re и Im) из блока 2, коэффициенты компенсации разностей задержек сигнала в парах антенн ekmni=exp(-j2πƒkτmnRi) и весовые коэффициенты  и
и  .
.
Пример реализации блока 4 измерения отклонения δri дальности ОТ от искомой и получения оценки координаты показан на фиг. 4, где: 4.1 - модуль суммирования по частоте мнимых элементов ВСПМ для каждой пары антенн с умножением на hk, ƒk и ekmnij (здесь и далее в скобках указан блок или модуль из которого поступают данные или куда отправляются), результаты - величины Cmni для всех Мп пар антенн поступают в модуль 4.2 - модуль суммирования по индексу mn с весовым коэффициентом wαmni, получая величине ci, пропорциональне. оцениваемому отклонению δri. 4.3 - модуль суммирования по частоте вещественных элементов ВСПМ для каждой пары антенн с умножением на hk,  и ekmnij. 4.4 - модуль суммирования по индексу mn с весовым коэффициентом w2αmni - получение нормирующей величины gi. 4.5 - модуль оценки отклонения δαij путем нормирования ci на gi. 4.6 - малое осреднение оценки отклонения по i. 4.7 - оценка направления путем корректировки опорной точки на величину отклонения.
и ekmnij. 4.4 - модуль суммирования по индексу mn с весовым коэффициентом w2αmni - получение нормирующей величины gi. 4.5 - модуль оценки отклонения δαij путем нормирования ci на gi. 4.6 - малое осреднение оценки отклонения по i. 4.7 - оценка направления путем корректировки опорной точки на величину отклонения.
В блоке 5 (программируемый компьютер) выполняется динамическое сглаживание малоосредненных оценок координат  , объема I каждая, с основным осреднением оценок за заданное время Тн (J циклов малого осреднения) и определением их производных для прогноза ОТ на следующий шаг.
, объема I каждая, с основным осреднением оценок за заданное время Тн (J циклов малого осреднения) и определением их производных для прогноза ОТ на следующий шаг.
Блок 6 (программируемые компьютер, контроллер) обеспечивает вычислительные операции для всех блоков меж-антенной пространственно-временной обработки,
С помощью рассмотренного устройства предложенный способ выполняется следующим образом. Наблюдатель с пульта управления назначает сектор углов и интервал дальностей наблюдения и на индикаторе обзора следит за появлением сигнальных отметок (СО) источников излучения. Корректирует параметры предварительной обработки, если это необходимо: усиление, границы частотного диапазона, частоту дискретизации, параметры выборки БПФ - Nдпф, параметры малого и динамического осреднения J, I и пр. Выбрав СО для определения точных координат и сопровождения, назначает нижнюю границу интервала дальностей Dфн, имея в виду, что чем меньше Dфн, тем острее главный максимум отклика и, следовательно больше крутизна ДХ и выше точность определения дальности, кроме того, в процессе наблюдения дальность до источника не должна становиться меньше Dфн, т.к. в области DS<Dфн некоторые вычисления некорректны (отрицательное число под корнем).
По сигналу с пульта начинается определение точных координат и сопровождение. На шкалах индикатора визиром считываются координаты СО  и назначаются первой опорной точкой (ОТ):
и назначаются первой опорной точкой (ОТ):  , после чего включаются в действие все блоки обработки согласно схемам рисунков фиг. 3 и фиг. 4.
, после чего включаются в действие все блоки обработки согласно схемам рисунков фиг. 3 и фиг. 4.
Показать работоспособность и преимущества предлагаемого способа удобнее всего на численном примере, используя графики дискриминационных характеристик заданной приемной системы, рассчитанные в диапазоне дальностей по способу прототипа и предлагаемым способом в равных условиях. Для расчетов принято: ПС с тремя антеннами, базовым размером ВПС=191.5⋅λср м, где λср - длина волны на средней частоте диапазона приема, скорость звука с=1500 м/с. Интересующий наблюдателя интервал дальностей D=(1,0-20.0)км. Дальность до нижней границы интервала виртуальной фокусировки Dфн=rфн=1.0 км, как показано на рисунке фиг. 2. На графиках фиг. 5 представлены дискриминационные характеристики отклонения дальности от ее опорного значения Dоп, (ДХД), измеряемые по текущей i-той выборке БПФ, рассчитанные известным способом (прототип, фиг 5а) и предлагаемым (фиг 5б) для фактического расположения источника излучения на дальностях DS=(1, 2, 3, 5, 10 и 20) км. На горизонтальной оси расположены значения отклонений (D-Dоп) от опорной точки (D=Dоп) в метрах. На вертикальной оси оси - средние (по времени) выходные значения дискриминаторов  , для удобства и наглядности отнесенные к СКО флуктуаций этих значений σz(α=αоп,D=Dоп) при некотором заданном отношении сигнал/помеха на антеннах ПС. Конкретное значение уровня помехи в нашем рассмотрении не существенно. Методика таких расчетов описана в работе [Гампер Л.Е. Критерии оценки дальности действия пассивной гидролокации с разнесенными антеннами // НТС «Гидроакустика», вып. 11. СПб, 2010. С. 50-60.]. Она удобна тем, что значение графика z является по существу величиной выходного отношения сигнал/помеха дискриминации при рассогласовании (D-Dоп). Крутизна квазилинейного, рабочего участка ДХ
, для удобства и наглядности отнесенные к СКО флуктуаций этих значений σz(α=αоп,D=Dоп) при некотором заданном отношении сигнал/помеха на антеннах ПС. Конкретное значение уровня помехи в нашем рассмотрении не существенно. Методика таких расчетов описана в работе [Гампер Л.Е. Критерии оценки дальности действия пассивной гидролокации с разнесенными антеннами // НТС «Гидроакустика», вып. 11. СПб, 2010. С. 50-60.]. Она удобна тем, что значение графика z является по существу величиной выходного отношения сигнал/помеха дискриминации при рассогласовании (D-Dоп). Крутизна квазилинейного, рабочего участка ДХ  определяет точность измерения дальности пассивным гидролокатором. На графиках фиг. 5а видно, что при всех дальностях ДХ не антисимметрична и ее крутизна в точке D=Dоп значительно уменьшается с увеличением фактической дальности до источника излучения. На графиках фиг. 5б крутизна ДХ в точке D=Dоп практически постоянна, а ее разброс (менее 0.25%) определяется незначительным расхождением на краях рабочего квазилинейного участка. Величины отношений крутизны ДХ при предлагаемом, нелинейном ηнс и известном способе ηтрс, на дальностях до источника излучения от 1.0 до 20.0 км, приведены ниже:
определяет точность измерения дальности пассивным гидролокатором. На графиках фиг. 5а видно, что при всех дальностях ДХ не антисимметрична и ее крутизна в точке D=Dоп значительно уменьшается с увеличением фактической дальности до источника излучения. На графиках фиг. 5б крутизна ДХ в точке D=Dоп практически постоянна, а ее разброс (менее 0.25%) определяется незначительным расхождением на краях рабочего квазилинейного участка. Величины отношений крутизны ДХ при предлагаемом, нелинейном ηнс и известном способе ηтрс, на дальностях до источника излучения от 1.0 до 20.0 км, приведены ниже:

Значения таблицы во второй строке равны уменьшению среднеквадратической погрешности (СКО) определения дальности предлагаемым способом σDнс по сравнению с известным способом σDтрс на дальностях до источника излучения от 1.0 до 20.0 км. Следует отметить, что применение предлагаемого способа не связано с каким-либо ухудшением энергетических параметров обработки сигналов по сравнению с прототипом, т.к. как в первом, так и во втором случае выходной уровень дискриминации одинаково определяется суммой сфазированых попарных корреляций сигналов антенн ПС. Параметры и пространственные характеристики отклика по направлениям при использовании предлагаемого способа не меняются.

Использование: изобретение относится к области гидроакустики. Сущность: в способе определения дальности до движущегося источника излучения пассивным гидролокатором, содержащим М разнесенных гидроакустических антенн (М≥3), с предварительной обработкой, включая дискретизацию, цифровое преобразование и преобразование Фурье (ПФ), средства обзора в заданном секторе наблюдения и интервале дальностей, определение координат обнаруженной сигнальной отметки на индикаторе обзора αн, Dн, а для определения и сопровождения текущего направления на движущийся источник излучения  фазируют каждую m-ю антенну в направлении от ее центра на ОТ, на каждом i-м цикле ДПФ измеряют комплексные попарные взаимные спектры плотности мощности (ПВСПМ) сигналов пар антенн приемной системы и используют дискриминатор отклонений направления. Для определения текущего значения дальности на каждом i-м цикле ДПФ используют дискриминатор отклонения ее опорного значения дальности Dопi от искомого истинного DSi, применяя при этом нелинейную шкалу дальностей до виртуальных точек фокусировки приемной системы Rфi с координатами <αопi, rф>, для чего на линейной шкале D назначают заранее нижнюю границу интервала дальностей Dфн, в котором предположительно будет перемещаться источник излучения в процессе наблюдения и сопровождения: D≥Dфн, и на каждом очередном i-м цикле ДПФ назначают в нем опорную виртуальную точку фокусировки приемной системы Rфi с координатами <αопi, rопi>, таким образом, что направление на Rфi совпадает с αопi, а дальность rопi связана с Dопi жесткой нелинейной зависимостью:
фазируют каждую m-ю антенну в направлении от ее центра на ОТ, на каждом i-м цикле ДПФ измеряют комплексные попарные взаимные спектры плотности мощности (ПВСПМ) сигналов пар антенн приемной системы и используют дискриминатор отклонений направления. Для определения текущего значения дальности на каждом i-м цикле ДПФ используют дискриминатор отклонения ее опорного значения дальности Dопi от искомого истинного DSi, применяя при этом нелинейную шкалу дальностей до виртуальных точек фокусировки приемной системы Rфi с координатами <αопi, rф>, для чего на линейной шкале D назначают заранее нижнюю границу интервала дальностей Dфн, в котором предположительно будет перемещаться источник излучения в процессе наблюдения и сопровождения: D≥Dфн, и на каждом очередном i-м цикле ДПФ назначают в нем опорную виртуальную точку фокусировки приемной системы Rфi с координатами <αопi, rопi>, таким образом, что направление на Rфi совпадает с αопi, а дальность rопi связана с Dопi жесткой нелинейной зависимостью:  , где γф - масштабный коэффициент, и определяют величину и знак отклонения δRi текущего опорного значения roпi от искомого значения дальности до виртуального источника, а текущую оценку фактической дальности на i-м цикле ДПФ определяют как
, где γф - масштабный коэффициент, и определяют величину и знак отклонения δRi текущего опорного значения roпi от искомого значения дальности до виртуального источника, а текущую оценку фактической дальности на i-м цикле ДПФ определяют как  и подвергают динамическому осреднению известными методами определения параметров последовательных измерений и прогноза их значений на последующие циклы измерений. Технический результат: повышение точности определения дальности, особенно при больших значениях D/B, где В - базовый размер ПС. 1 з.п. ф-лы, 5 ил.
и подвергают динамическому осреднению известными методами определения параметров последовательных измерений и прогноза их значений на последующие циклы измерений. Технический результат: повышение точности определения дальности, особенно при больших значениях D/B, где В - базовый размер ПС. 1 з.п. ф-лы, 5 ил.
1. Способ определения дальности до движущегося источника излучения пассивным гидролокатором, содержащий прием сигналов М антеннами, М≥3, предварительную обработку, включающую усиление, фильтрацию с частотной характеристикой hk, синхронную дискретизацию, цифровое преобразование, циклическое дискретное преобразование (ДПФ) в полосе приема ƒн≤ƒk≤ƒв (преобразование Фурье), средства обзора в заданном секторе наблюдения и интервале дальностей, определение координат обнаруженной сигнальной отметки на индикаторе обзора αн, Dн, которые на момент начала работы средств точного определения координат и сопровождения используют как опорную точку (ОТ) с координатами Dоп(t0)=Dн, αоп(t0)=αн, а для определения и сопровождения текущего направления на движущийся источник излучения  фазируют каждую m-ю антенну в направлении от ее центра на ОТ и на каждом i-м цикле ДПФ измеряют комплексные попарные взаимные спектры плотности мощности (ПВСПМ) сигналов пар антенн приемной системы, используют дискриминацию текущих отклонений направления от опорной точки αопi и известные методы динамического сглаживания последовательности оценок
фазируют каждую m-ю антенну в направлении от ее центра на ОТ и на каждом i-м цикле ДПФ измеряют комплексные попарные взаимные спектры плотности мощности (ПВСПМ) сигналов пар антенн приемной системы, используют дискриминацию текущих отклонений направления от опорной точки αопi и известные методы динамического сглаживания последовательности оценок  , отличающийся тем, что для определения текущего значения дальности пассивным гидролокатором на каждом i-м цикле ДПФ используют дискриминацию отклонения ее опорного значения Dопi от искомого истинного DSi, применяя при этом нелинейную шкалу дальностей rф до виртуальных точек фокусировки приемной системы Rфi с координатами <αопi, rф>, для этого на линейной шкале D назначают заранее нижнюю границу интервала дальностей Dфн, в котором предположительно будет перемещаться источник излучения в процессе наблюдения и сопровождения: D≥Dфн, на каждом очередном i-м цикле ДПФ назначают в нем опорную виртуальную точку фокусировки приемной системы Rфi с координатами <αопi, rопi>, таким образом, что направление на Rфi совпадает с αопi, а дальность rопi связана с Dопi нелинейной зависимостью:
, отличающийся тем, что для определения текущего значения дальности пассивным гидролокатором на каждом i-м цикле ДПФ используют дискриминацию отклонения ее опорного значения Dопi от искомого истинного DSi, применяя при этом нелинейную шкалу дальностей rф до виртуальных точек фокусировки приемной системы Rфi с координатами <αопi, rф>, для этого на линейной шкале D назначают заранее нижнюю границу интервала дальностей Dфн, в котором предположительно будет перемещаться источник излучения в процессе наблюдения и сопровождения: D≥Dфн, на каждом очередном i-м цикле ДПФ назначают в нем опорную виртуальную точку фокусировки приемной системы Rфi с координатами <αопi, rопi>, таким образом, что направление на Rфi совпадает с αопi, а дальность rопi связана с Dопi нелинейной зависимостью:  , где γф - масштабный коэффициент, равный квадрату нижней границы
, где γф - масштабный коэффициент, равный квадрату нижней границы  , и определяют величину и знак отклонения
, и определяют величину и знак отклонения  текущего опорного значения rопi от искомого значения дальности до виртуального источника rSi, а текущую оценку фактической дальности на i-м цикле ДПФ определяют как
текущего опорного значения rопi от искомого значения дальности до виртуального источника rSi, а текущую оценку фактической дальности на i-м цикле ДПФ определяют как  и подвергают последующему динамическому осреднению известными методами определения параметров последовательных измерений и прогноза их значений на следующие циклы измерений.
и подвергают последующему динамическому осреднению известными методами определения параметров последовательных измерений и прогноза их значений на следующие циклы измерений.
2. Способ по п. 1, отличающийся тем, что для определения величины и знака отклонения текущего опорного значения rопi от искомого значения дальности до виртуального источника  используют дискриминацию отклонения дальности, для чего рассчитывают разность времен распространения сигнала tmRi (m, n=1, …, М) из виртуальной точки Rопi к центрам Оm, On каждой mn-й пары антенн τmnRi=tmRi-tnRi, по формулам тригонометрии, используя скорость звука в среде с, а также определяют весовые коэффициенты, равные производной по r разности времен распространения τmRi(αопi, rопi), т.е.
используют дискриминацию отклонения дальности, для чего рассчитывают разность времен распространения сигнала tmRi (m, n=1, …, М) из виртуальной точки Rопi к центрам Оm, On каждой mn-й пары антенн τmnRi=tmRi-tnRi, по формулам тригонометрии, используя скорость звука в среде с, а также определяют весовые коэффициенты, равные производной по r разности времен распространения τmRi(αопi, rопi), т.е.  , суммируют по частоте ƒk мнимые части ПВСПМ каждой mn-й пары антенн в полосе приема [ƒн, ƒв] с умножением каждого слагаемого на коэффициент частотной характеристики hk, на частоту ƒk и на коэффициент ekmni=ехр(-j2πƒkτmnRi) компенсации разности времен распространения сигнала от опорной виртуальной точки Rфi к центрам каждой mn-й пары антенн, в результате получают для каждой mn-й пары суммарные величины Cmni i-го цикла ДПФ, затем суммируют по частоте ƒk вещественные части ВСПМ с умножением каждого слагаемого на hk, на коэффициент компенсации ekmni и на квадрат частоты
, суммируют по частоте ƒk мнимые части ПВСПМ каждой mn-й пары антенн в полосе приема [ƒн, ƒв] с умножением каждого слагаемого на коэффициент частотной характеристики hk, на частоту ƒk и на коэффициент ekmni=ехр(-j2πƒkτmnRi) компенсации разности времен распространения сигнала от опорной виртуальной точки Rфi к центрам каждой mn-й пары антенн, в результате получают для каждой mn-й пары суммарные величины Cmni i-го цикла ДПФ, затем суммируют по частоте ƒk вещественные части ВСПМ с умножением каждого слагаемого на hk, на коэффициент компенсации ekmni и на квадрат частоты  получая для каждой пары суммарную величину Gmni, затем суммируют по индексу mn величины Cmnt с весовыми коэффициентами wmnRj, получая величину ci, которую делят на сумму по индексу mn величин Gmnt с тем же весовым коэффициентом в квадрате
получая для каждой пары суммарную величину Gmni, затем суммируют по индексу mn величины Cmnt с весовыми коэффициентами wmnRj, получая величину ci, которую делят на сумму по индексу mn величин Gmnt с тем же весовым коэффициентом в квадрате  получая величину gi, и определяют отклонение
получая величину gi, и определяют отклонение  выполняют осреднение оценок отклонения по i=1, 2, …, I циклам ДПФ, получая малоосредненную оценку отклонения
выполняют осреднение оценок отклонения по i=1, 2, …, I циклам ДПФ, получая малоосредненную оценку отклонения  , а текущую оценку фактической дальности на i-м цикле ДПФ определяют как
, а текущую оценку фактической дальности на i-м цикле ДПФ определяют как  .
.
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ | 2016 |
|
RU2623831C1 |
| Способ пассивного определения координат источников гидроакустического излучения | 2018 |
|
RU2711432C1 |
| Способ пассивного определения координат движущегося слабого источника излучения | 2019 |
|
RU2724315C1 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 2012 |
|
RU2507531C1 |
| WO 2008138433 A1, 20.11.2008 | |||
| RU 2009122420 А, 20.12.2010 | |||
| Способ пассивного определения координат источников гидроакустического излучения | 2017 |
|
RU2680860C1 |
