Изобретение относится к области гидроакустики, конкретно - к пассивной гидролокации (ПГЛ), а также может быть использовано в атмосферной акустике и пассивной радиолокации.
При пассивной локации одного или нескольких источников гидроакустического излучения в ближней зоне поля источника (зоне Френеля) используют протяженные (широкоапертурные) приемные системы (ПС) из М (М≥3) гидроакустических приемников или разнесенных направленных локальных антенн (далее просто «антенны ПС») и средства предварительной и межантенной пространственно-временной обработки информации с двухкоординатными индикаторами обзора и координатной сеткой <направление/дальность> в поле наблюдения с заданным сектором направлений α и интервалом дальностей D ([1] - Гампер Л.Е. Оптимальная пространственно-временная обработка в системах пассивной гидролокации с разнесенными антеннами // Научно-техн. сб. Гидроакустика. Вып. 10, СПб, 2009. С. 49-60.). Межантенная пространственно-временная обработка обеспечивает наблюдение «полезного» сигнала каждого источника излучения на индикаторе ПГЛ в виде «сигнальной отметки» (СО), обусловленной «откликом» приемной системы на его сигнал на фоне выбросов помехи. Отклик содержит «главный» максимум и «боковые» лепестки, приблизительно в (М2 - М)/2 раз меньшие главного), где М - число приемников или локальных антенн ПС. Главный максимум и боковые лепестки отклика образуют определенную устойчивую фигуру на индикаторе, идентифицируемую наблюдателем как сигнальная отметка интересующего его источника излучения.
При наличии нескольких источников излучения в поле наблюдения, необходимо обеспечить пространственное разрешение сигналов источников. Достаточное разрешение по направлению α в пассивной гидролокации обычно обеспечивается большим волновым размером измерительной базы ВПС/λср, где ВПС - базовый размер приемной системы, λср - длина волны принимаемого сигнала на средней частоте его спектра, но основным назначением пассивной гидролокации в ближней зоне является способность разрешения множественных источников по дальности D и определение их координат - направления и дальности <αs, Ds>. При этом сложность разрешения по дальности заключается в том, что главный максимум и боковые лепестки отклика приемной системы zmax(α, D) при оптимальной схеме обработки [1] с использованием фокусировки ПС в точку предполагаемого расположения источника <αs, Ds> в зоне Френеля обладают свойством асимметричного расширения в дальностном сечении z(D, αs=const) при увеличении измеряемого параметра D, приблизительно пропорционально D [1], ухудшая и даже делая невозможным разрешение источников по дальности на больших расстояниях (Ds>>ВПС), что особенно нежелательно в случаях отсутствия разрешения по направлению (когда источники «в створе») и, кроме того, эргономически затрудняет работу наблюдателя, снижая ее эффективность из-за неодинаковой формы сигнальной отметки и выбросов помехи по оси D в разных по дальности частях индикаторной картины. Это свойство асимметричного расширения дальностного сечения отклика приемной системы является объективной, неизбежной особенностью пространственной избирательности приемной системы в ближней зоне при ее фокусировке в точку предполагаемого расположения источника излучения.
Для преодоления нежелательной формы объектов графиков и диаграмм общеизвестны методы изменения его графического изображения на индикаторной картине с какой-либо заданной целью по принципу «кривого зеркала»: путем изменения линейного масштаба изображения по той или иной оси графика по заданному нелинейному правилу. В частности, общеизвестным примером этого метода является использование логарифмической или какой-либо другой шкалы, когда график z(x) с линейной шкалой х заменяют графиком  при этом значения графика распределяются на шкале нелинейно и не эквидистантно, что в некоторых случаях также неудобно наблюдателю. Во многих случаях это позволяет обеспечить симметрию и постоянство объекта графики, но не может улучшить разрешение объектов, т.к. информационное поле картины при этом не меняется, а лишь графически деформируется.
при этом значения графика распределяются на шкале нелинейно и не эквидистантно, что в некоторых случаях также неудобно наблюдателю. Во многих случаях это позволяет обеспечить симметрию и постоянство объекта графики, но не может улучшить разрешение объектов, т.к. информационное поле картины при этом не меняется, а лишь графически деформируется.
Известны также методы определения координат движущегося источника излучения путем динамической обработки последовательности измерения направления на него [Кузьмин С.З. Цифровая обработка радиолокационной информации. М.: Сов. Радио, 1967]. В них часто используется прием оценки не самого искомого параметра D, а параметра R=D-1, что позволяет упростить решение задачи с меньшими вычислительными ресурсами. Недостатки этих методов: использование только измерений направления, большое время решения задачи, необходимость гипотезы о характере траектории источника и др.
Наиболее близким аналогом по количеству общих признаков к предлагаемому изобретению является «Способ пассивного определения координат источников излучения» [патент РФ №2507531, кл. МПК G01S 3/80. Рег. 20.02.2014 г.]. Способ содержит: прием сигнала широко-апертурной приемной системой из М разнесенных антенн (М≥3) в зоне Френеля, предварительную обработку, включающую: преобразование акустических сигналов в электрические, усиление, предварительную фильтрацию, дискретизацию и преобразование в частотную область, ориентацию характеристик направленности антенн (ХН) в направлении ожидаемого расположения источника излучения общеизвестными методами дальнего поля. В заданном поле индикации - секторе углов и интервале дальностей с границами: «αmin, αmax; Dmin, Dmax» организуют координатную сетку (КС) «направление α - дальность D»: αр, Dq (р=1, …Р, q=1, …Q), с заданными границами поля наблюдения αmin≤αр≤αmax; Dmin≤Dq≤Dmax» и интервалами дискретности линейных шкал координатной сетки по направлению δα и дальности δD. Для каждого pq-го узла координатной сетки вычисляют попарные разности τmn(pq) времен распространения сигнала tm(pq) и tn(pq) от источника с потенциально-ожидаемыми координатами αр, Dq, к центрам антенн m и n из точки поля наблюдения Npq с координатами pq-го узла координатной сетки αр, Dq. Последующие операции с выходными сигналами антенн до индикации удобно назвать P×Q-канальной межантенной (МА) обработкой, где каждый pq-й канал получает сигналы с сумматоров М антенн и в результате пространственно-временной обработки (ПВО) выдает свое значение zpq в pq-ю ячейку индикаторной таблицы. Для этого выполняют квадратичное детектирование выходных сигналов сумматоров каждой m-й антенны путем вычисления их квадрата модуля и измеряют попарные взаимно-корреляционные функции (ПВКФ) Cmn(τ) сигналов, поступающих с сумматоров каждой m-й антенны с сигналом каждой другой n-й антенны ПС путем перемножения комплексных сигналов m-й и n-й антенн, предварительного накопления и обратного преобразования Фурье. Полученную таким образом Cmn(τ) используют в каждом pq-м канале МА ПВО для измерения значений взаимной корреляции каждой mn-й пары антенн в точке τ=-τmn(pq), где τmn(pq)=tm(pq)-tn(pq), путем считывания значения Cmn(τ=τmn(pq)), таким образом компенсируя разность времен прихода сигнала к m-й и n-й антеннам из pq-й точки предполагаемого расположения источника излучения. В каждой pq-й ячейке индикаторной таблицы полученные значения взаимной корреляции пар антенн суммируют по индексу mn, удваивают и суммируют со значениями квадратичного детектирования. Полученную в результате индикаторную таблицу zpq - значений отклика приемной системы на сигнал источника излучения, накапливают в заданном времени Тн и выводят на координатную сетку индикатора, на которой отображаются «полезные» сигналы источников излучения S, в виде их сигнальных отметок и фоновое поле помехи. Координаты источников излучения определяют по положению главных максимумов их сигнальных отметок на координатных шкалах сетки αр, Dq (αр=рδα, Dq=qδD).
Преимущество этого способа в том, что он обеспечивает пассивное оптимальное (на основе метода максимального отношения правдоподобия [1]) определение координат источников гидроакустического излучения без собственного излучения.
Недостатками этого способа являются следующие:
- на двухкоординатном индикаторе главный максимум сигнальной отметки, а также ее боковые лепестки, имеют существенно асимметричную форму в сечении по дальности, причем эта асимметрия при малых дальностях невелика, но на больших дальностях быстро увеличивается с одновременным увеличением ширины дальностного сечения лепестка, что эргономически затрудняет работу наблюдателя, а также автоматическую обработку изображений по определению максимального значения отклика и оценки дальности;
- увеличение ширины дальностного сечения сигнальной отметки приводит к невозможности разрешения множественных источников излучения по дальности на больших расстояниях (Ds>>ВПС), что особенно важно в ситуациях, когда ограничено или отсутствует разрешение источников излучения по направлению α;
- наряду с увеличением ширины дальностного сечения сигнальной отметки, увеличивается также ширина выбросов помехи в верхней части индикаторной картины, что эргономически затрудняет работу наблюдателя из-за неодинаковой формы сигнальной отметки и выбросов помехи в разных частях индикаторной картины (ближние и дальние дистанции) и снижает эффективность работы оператора с источниками, расположенными на больших дальностях.
Задачей изобретения является определение координат источников с большей точностью и разрешением по дальности, повышение эффективности работы оператора - наблюдателя.
Техническим результатом изобретения является увеличение точности определения дальности при наличии нескольких источников и эффективности работы наблюдателя путем увеличения способности разрешения сигнальных отметок источников излучения на индикаторной картине пассивного гидролокатора, на основе инвариантности к дальности и симметрии формы главного максимума отклика приемной системы во всем заданном интервале в ближней зоне поля источника излучения (зоне Френеля), без изменения формы сечения сигнальной отметки по направлению и без уменьшения ее максимального уровня. Это относится и к выбросам помехи, форма которых также становятся инвариантной к дальности, создавая изотропное фоновое поле, на котором оператору легче идентифицировать сигнальные отметки, используя специфическую, не изотропную структуру формы отклика.
Для обеспечения указанного технического результата в способ пассивного определения координат источников излучения, содержащий прием сигнала широко-апертурной приемной системой из М разнесенных антенн (М≥3) в зоне Френеля, предварительную обработку, включающую: преобразование акустических сигналов в электрические, усиление, предварительную фильтрацию, дискретизацию и преобразование в частотную область, ориентацию характеристик направленности антенн в направлении ожидаемого расположения источника излучения общеизвестными методами дальнего поля, задание поля индикации с границами «αmin, αmax; Dmin, Dmax», организацию, координатной сетки «направление α - дальность D»:: αр, Dq (p=1, …Р, q=1, …Q), с границами поля наблюдения «αmin≤αр≤amax; Dmin≤Dq≤Dmax» и интервалами дискретности линейных шкал координатной сетки по направлению δα и дальности δD и P×Q-канальную меж-антенную обработку, включающую: квадратичное детектирование выходных сигналов каждой антенны, измерение попарных взаимно-корреляционных функций (ПВКФ) Cmn(τ) каждой m-й антенны с другой, n-й антенной и формирование индикаторной таблицы с P×Q ячейками, которую выводят на индикатор с координатной сеткой и линейными шкалами α (градус) и D (метр), а координаты источников излучения определяют по положению главного максимума индикаторных значений сигнальных отметок на соответствующих шкалах координатной сетки, введены новые признаки: для каждой pq-й ячейки индикаторной таблицы определяют виртуальную точку фокусировки приемной системы Rpq с координатами <αр, rq>, совпадающую по направлению с αр и отличающуюся по дальности: rq≠Dq, но связана с Dq нелинейной зависимостью. Приемную систему фокусируют в точку Rpq, для чего вычисляют разность времен распространения сигнала zmnR(pq)=tmpqR-tnpqR из pq-й виртуальной точки Rpq к центрам каждой пары антенн Om, On по формулам тригонометрии, используя скорость звука в среде с. При формировании индикаторной таблицы для каждой pq-й ячейки определяют значения взаимной корреляции Cmn(τmnR(pq)) всех пар антенн путем считывания значений измеренных ПВКФ Cmn(τ) в точках τ=τmnR(pq), и заполняют этими значениями ячейки индикаторной таблицы, путем суммирования по индексу mn удвоенных значений Cmn(τmnR(pq)) и выходных значений квадратичного детектирования сигналов с выходов антенн. Полученную таким образом индикаторную таблицу выводят на индикатор с координатной сеткой и шкалами, а координаты источников излучения определяют по положению главных максимумов их сигнальных отметок на шкалах координатной сетки αр, Dq.
Нелинейная зависимость дальности rq до виртуальной точки фокусировки Rpq от дальности pq-го узла Dq определяется как rq=γ⋅Dq-1, где γ - масштабный коэффициент, определяемый из равенства rq=γм⋅Dq-1, при rq=Dq.
Время задержки сигнала tmpqR=lmpqR/c каждой из М антенн для фокусировки приемной системы в pq-ю виртуальную точку Rpq, где lmpqR определяют по формулам тригонометрии как сторону RpqOm=lmpqR треугольника RpqOOm, где О - начало координат - центр приемной системы, Om - центр m-й локальной антенны.
Заявленный технический результат достигается благодаря тому, что в соответствии с рассматриваемым предложением удалось преобразовать форму отклика ПС на сигнал излучателя таким образом, что его главный максимум и боковые лепестки приблизительно симметричны в дальностном сечении во всем заданном интервале дальностей в ближней зоне, а их ширина (например, на уровне 0.7) соответствует близким дальностям, оставаясь постоянной во всем заданном интервале (инвариантна к дальности), при этом положение вершины главного максимума отклика на индикаторной картине соответствует значению истинной дальности до источника излучения Ds на основной, линейной метрической шкале дальностей. Новизна здесь заключается в использовании свойства обратной зависимости компенсируемых отрезков траекторий луча lmR от фактической дальности до источника Ds, в чем можно убедиться на примере приближенно-обратной (при больших отношениях R/d) зависимости высоты h сегмента дуги окружности радиуса R от величины этого радиуса, где d - хорда, стягивающая дугу. Таким образом, благодаря взаимодействию двух нелинейных зависимостей от дальности: lmR(D) и r(D) получается, что отклик приемной системы формируется в геометрии <ПС/r>, в непосредственной близости от приемной системы (конкретно, при rq=Dq), но эта форма сосредоточена на шкале дальностей так, что ее главный максимум всегда расположен в точке, соответствующей фактической дальности Ds.
Введение новых признаков позволяет повысить разрешающую способность, точность определения координат источника излучения и, что особенно важно - на больших расстояниях, максимальных в ближней зоне, в том числе в отсутствии разрешения по направлению α, а также повысить эффективность работы наблюдателя при слежении за источниками излучения. Введение новых признаков не изменяет формы отклика в угловых сечениях и не приводит к уменьшению величины главного максимума отклика ПС, который остается на уровне оптимального метода обработки в прототипе, как это заявлено в задаче и в технических результатах изобретения.
Сущность предполагаемого изобретения поясняется фиг. 1-6.
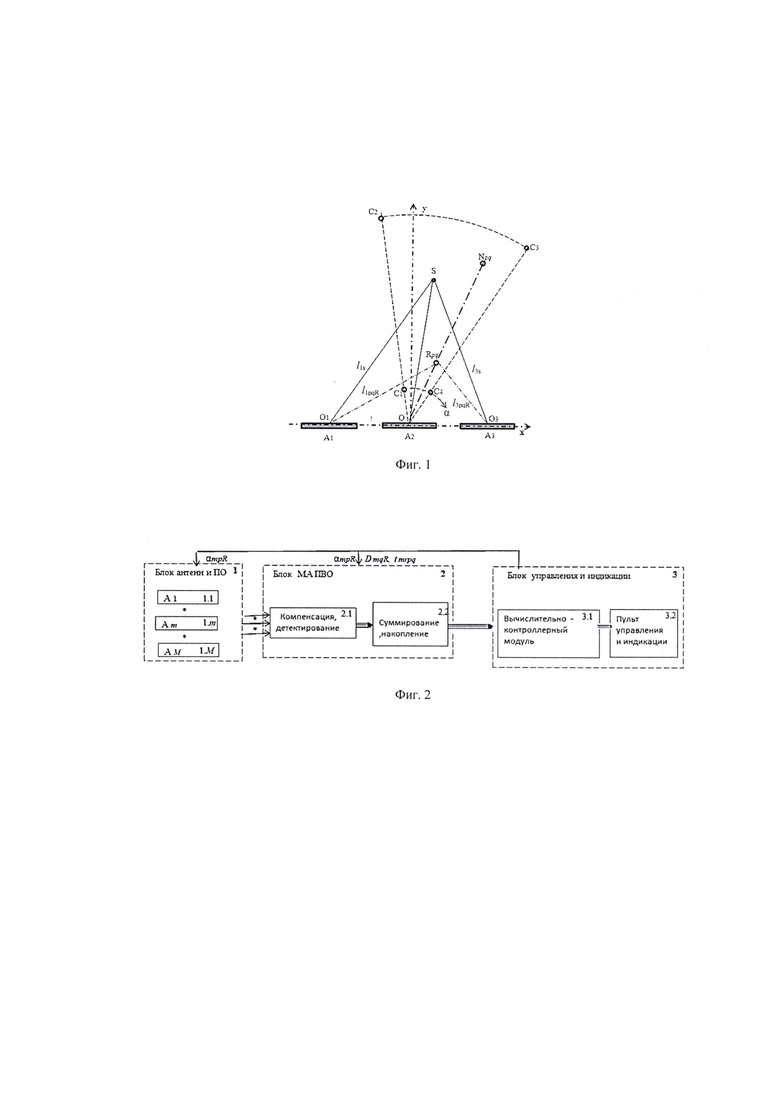
Фиг. 1 - Геометрическая схема системы «антенны - источник» на примере ПС из 3-х антенн.
Фиг. 2 - Пример блок-схемы устройства, реализующего предлагаемый способ на основе М-антенной ПС.
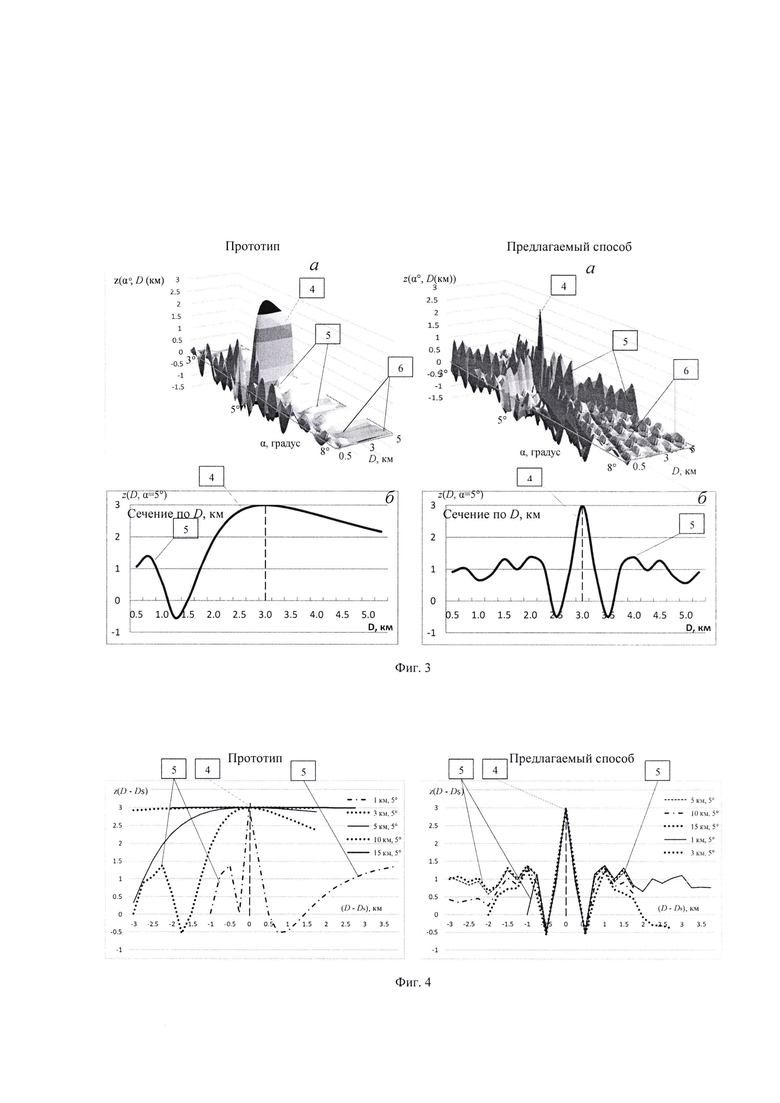
Фиг. 3 - Численный пример диаграммы расчетного отклика ПС на сигнал источника излучения (без помехи) - а и графика ее дальностного сечения, проходящего через главный максимум сигнальной отметки - б, при использовании способа - прототипа (слева) и предлагаемого способа (справа), при дальности до источника излучения Ds=3.0 км, αs=5.0°.
Фиг. 4 - Графики формы вершины (в их окрестности) сечений по дальности главных максимумов откликов ПС при расстояниях до источника Ds=1.0, 3.0, 5.0, 10.0, 15 км, αs=5.0°, на относительной шкале <D - Ds> для способа-прототипа (левый график) и предлагаемого способа (правый график).
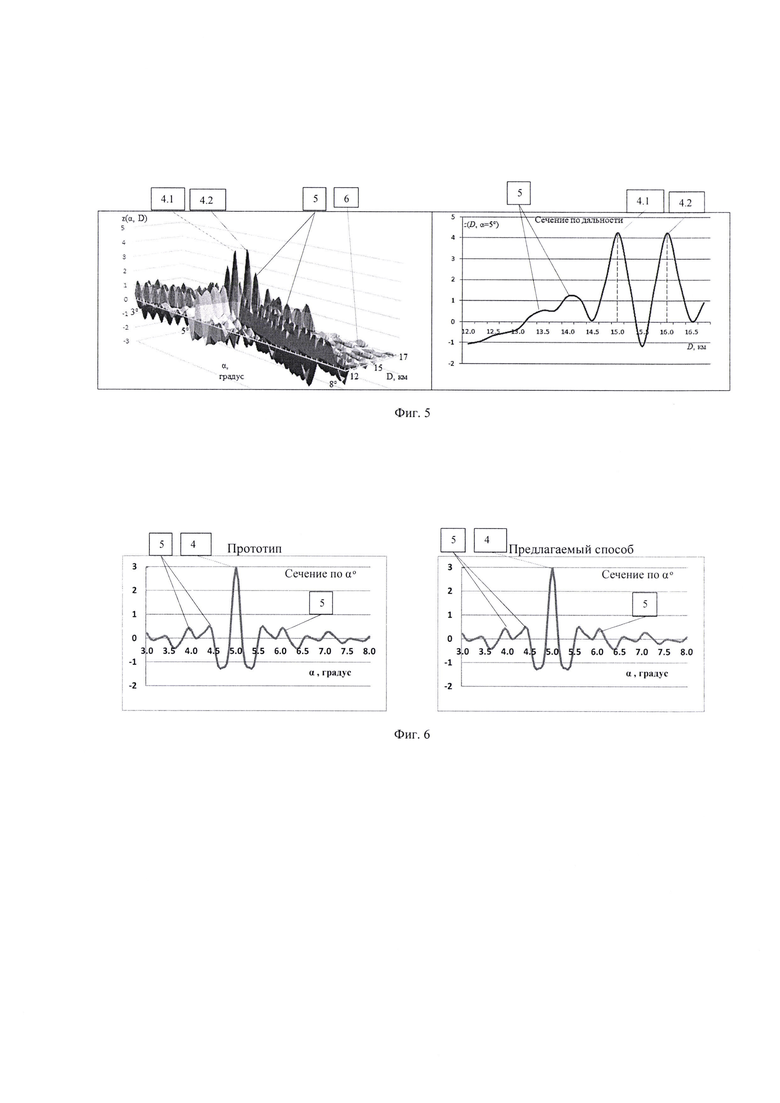
Фиг. 5 - Пример разрешения сигналов двух источников в области предельных дальностей метода пассивной гидролокации - вблизи дальней теоретической (при заданных параметрах ПС) границы зоны Френеля.
Фиг. 6 - Графики сечений отклика ПС по направлению на сигнал источника излучения с использованием способа-прототипа (левый график) и предлагаемого способа (правый график) - они идентичны.
Сущность предлагаемого способа можно пояснить на примере геометрической схемы «антенны - источник», изображенной на фиг. 1, где: А1, А2, А3 - антенны приемной системы (ПС) в прямоугольной системе координат хОу, О1, О2=О, О3 - центры антенн ПС; C1 (αmin, Dmin), С2 (αmin, Dmax), С3 (αmax, Dmax), С4 (αmax, Dmin) - границы поля наблюдения в полярной системе координат хОуα, угол α отсчитывается от оси у; S - источник излучения акустической энергии с координатами (αS, DS), DS равно отрезку SO, Npq - точка в пространстве, соответствующая pq-му узлу координатной сетки с координатами αр, Dq; Rpq - виртуальная точка фокусировки ПС pq-го узла с координатами αр, rq. В способе-прототипе фокусировка ПС выполняется непосредственно в точки ожидаемого расположения источника αр, Dq, последовательно перебирая р и q. Когда в результате этого перебора окажутся αр=αs и Dq=Ds все значения попарных ВКФ становятся максимальными и равными 1.0, что в сумме обеспечивает максимальное значение главного максимума сигнальной отметки, равное 3.0. В предлагаемом способе фокусировка ПС в каждом pq-м узле выполняется в виртуальную точку Rpq (путем компенсации разностей времен прихода сигнала к парам антенн из этой точки), в которой благодаря взаимодействию двух нелинейных зависимостей от дальности: lmR(D) и r(D) получается, что отклик приемной системы формируется в геометрии <ПС/r>, в непосредственной близости от приемной системы (r(D)<<D), но эта форма сосредоточена на шкале дальностей так, что ее главный максимум расположен в точке, соответствующей фактической дальности Ds.
Вариант реализации предполагаемого изобретения можно пояснить на примере блок-схемы устройства, показанной на фиг. 2. Блок-схема фиг. 2 включает: блок 1 - приемная система («ПС и ПО») из М разнесенных антенн с модулями предварительной обработки (1.1 ÷ 1.М), блок 2 - межантенная пространственно-временная обработка выходных сигналов антенн с модулями 2.1 - «Компенсация, детектирование» и 2.2 - «Суммирование, накопление» и блок 3 - «Управление и индикация», содержащий 3.1 - «вычислительно-контроллерный модуль» и 3.2 пульт управления.
Предложенный способ может быть реализован следующим образом: приемники антенн ПС получают акустический сигнал источника излучения в смеси с шумами моря, преобразуют их в электрические сигналы и подвергают предварительной обработке в модулях ПО 1.1 - 1.М: усиление, предварительную фильтрацию, дискретизацию, преобразование сигналов в частотную область, ориентацию характеристик направленности «и гена в предполагаемом направлении на источник. Эта ориентация обеспечивает прием сигналов источника излучения антеннами ПС на достаточно высоком уровне их характеристик направленности (ХН), например 0.9 во всем заданном оператором с пульта управления (блок 3) секторе наблюдения <αmin, αmax>. Если ХН антенн узкая по сравнению с заданным сектором наблюдения и не перекрывает его на заданном уровне, то обычно используют веер направленных каналов с заданным перекрытием (0.8, 0.9, 0.98 и пр.). Из блока 1 в блок 2, в модуль 2.1, поступают М выходных сигналов сумматоров антенн в виде текущей во времени последовательности комплексных массивов сигнала, сформированного в частотной области, в темпе циклов БПФ. В блоке 2 (модуль 2.1 «Компенсация, детектирование») на каждом цикле БПФ с каждым массивом для каждого pq-го узла координатной сетки выполняется P×Q-канальная межантенная пространственно-временная обработка М-векторного сигнала, включающая: квадратичное детектирование выходных сигналов антенн, определение попарных взаимно-корреляционных функций каждой m-й и n-й антенн Cmn(τ), определение для каждого pq-го узла координатной сетки значений взаимной корреляции всех пар антенн путем считывания значений Cmn(τ) в точках τ=τmnR(pq), где τmnR(pq) поступают из блока 3 (вычислительно-контроллерный модуль 3.1), тем самым компенсируя разность времен прихода сигнала к m-й и n-й антеннам. В модуле 2.2 «Суммирование» выполняется заполнение индикаторной таблицы путем суммирования по индексу mn в каждой pq-й ячейке удвоенных значений Cmn(τmnR(pq)) и значений квадратичного детектирования сигналов с выходов антенн. В модуле 2.2 «Накопление» выполняют временное накопление значений во всех P×Q ячейках индикаторной таблицы по последовательным циклам БПФ, обеспечивающих заданное наблюдателем на пульте управления 3.2 время накопления Тн. В модуле «Пульт управления и индикации» находятся органы управления гидролокатором и индикатор поля наблюдения. Наблюдатель задает отсюда границы поля наблюдения «αmin, αmax; Dmin, Dmax», интервалы дискретности координатной сетки δα, δD и параметры визира и шкал считывания направления и дальности, задаст время накопления, осуществляет управление и контроль за модулями предварительной и межантенной обработки, наблюдает по индикатору за появлением и перемещением источников излучения и с использованием визира считывает на шкалах их координаты.
Результаты использования предлагаемого способа и его преимущества по сравнению с прототипом можно показать на численном примере сравнительного расчета отклика приемной системы из трех антенн (без помехи) по способу-прототипу и по предлагаемому способу. Для примера выбрана приемная система из трех линейно расположенных антенн А1, А2, А3, в соответствии с геометрической схемой, приведенной на рисунке фиг. 1. Базовое расстояние ПС - между центрами антенн A1 и А3 принято ВПС=50 м. Средняя частота сигнала ƒср=5 кГц, полоса приема 4 кГц. Для простоты и наглядности принято, что уровни сигнала всех источников в точке приема (на выходе сумматоров антенн) везде одинаков и равен 1, а спектр сигнала - прямоугольный. С этими параметрами выполнены численные расчеты отклика приемной системы при наблюдении сигнала источника излучения на расстояниях от 1.0 до 16 км при геометрической схеме, соответствующей фиг. 1 и обработке сигналов в соответствии с описаниями прототипа и приведенным выше описанием предлагаемого способа. Отметим для ориентировки, что теоретическая (условная) дальняя граница зоны Френеля при указанных выше параметрах численного примера равна 2В2ПС/λ=16.7 км.
Результаты расчетов приведены на рисунках фиг. 3 6. Направление на источник излучения S от центра ПС - точки О во всех случаях αs=5°. На фиг. 3 показан типичный отклик по способу прототипа (слева) и предлагаемым способом (справа). Дальность на фиг. 3 равна Ds3=3.0 км. На рисунках фиг. 3 изображены: а - объемная диаграмма отклика ПС на горизонтальной плоскости <х (направление α), у (дальность D)>, в аксонометрической форме, в прямоугольной системе координат; б - дальностное сечение отклика, проходящие через его главный максимум. На графиках 3б, пунктирной линией показано положение максимума сигнальной отметки на шкале дальности.  - главный максимум отклика ПС,
- главный максимум отклика ПС,  - боковые лепестки отклика,
- боковые лепестки отклика,  - фоновое поле боковых лепестков. На диаграммах фиг. 3а и б - слева (прототип) видно, как главный максимум отклика асимметричен в дальностном сечении. В то же время, на диаграммах 6 справа (предлагаемый способ) видно, что как главный максимум , так и боковые остаются практически симметричными.
- фоновое поле боковых лепестков. На диаграммах фиг. 3а и б - слева (прототип) видно, как главный максимум отклика асимметричен в дальностном сечении. В то же время, на диаграммах 6 справа (предлагаемый способ) видно, что как главный максимум , так и боковые остаются практически симметричными.
На фиг. 4 приведены графики дальностного сечения главных максимумов и его окрестностей на относительной шкале (D-Ds), в интервале (-3÷3.5) км для фактических дальностей до источника I), 1.0, 3.0, 5.0. 10.0, 15.0 км, при способе-прототипе (левый график) и предлагаемом способе (правый график). На этих графиках видно, что при способе-прототипе только при Ds=1.0 км главный максимум отклика имеет какую-то симметрию в районе вершины, а при остальных дальностях не имеет и быстро расширяется с увеличением Ds, в то время как при предлагаемом способе, во всем представленном интервале Ds он имеет практически неизменную форму и ширину. Следует отметить, что при заданных параметрах численного примера (ВПС=50 м, ƒср=5 кГц) теоретическая (условная) дальняя граница ближней зоны (Френеля) равна 16.7 км, за пределами которой, сам метод пассивной гидролокации может быть не актуален.
На диаграмме и графике фиг. 5 показана способность предлагаемого способа к высокому разрешению источников излучения по дальности (при отсутствии разрешения по направлению: т.е. «в створе») на предельных для использования метода кривизны волнового фронта расстояниях, т.е. у границы ближней зоны. На фиг. 5:  и
и  главные максимумы сигнальных отметок источников излучения с расстояний: 15 и 16 км, соответственно. и - боковые лепестки отклика ПС и их фоновое поле, соответственно.
главные максимумы сигнальных отметок источников излучения с расстояний: 15 и 16 км, соответственно. и - боковые лепестки отклика ПС и их фоновое поле, соответственно.
Как показано на графиках фиг. 6, предлагаемый способ не меняет форму сигнальной отметки в угловом сечении и не изменяет уровень выходного сигнала, оставляя их таким же, как в прототипе, при всех значениях дальности Ds до источника излучения в ближней зоне, что соответствует поставленной задаче и техническим результатам предлагаемого изобретения.
Использование: изобретение относится к области гидроакустики, конкретно - к пассивной гидролокации, а также может быть использовано в атмосферной акустике и пассивной радиолокации. Сущность: в способе пассивного определения координат источников излучения, содержащем прием сигнала широко-апертурной приемной системой из М разнесенных антенн (М≥3) в зоне Френеля, предварительную обработку, задание поля индикации с границами «αmin, αmax; Dmin, Dmax», и с координатной сеткой «направление α - дальность D»:: αр, Dq (р=1, …Р, g=1, …Q), с границами поля наблюдения «αmin<αp<αmax; Dmin≤Dq≤Dmax» и Р×Q-канальную меж-антенную обработку, с координатной сеткой и линейными шкалами α (градус) и D (метр), введены новые признаки: для каждой pq-й ячейки индикаторной таблицы определяют виртуальную точку фокусировки приемной системы Rpq с координатами <αр, rq>, совпадающую по направлению с αр и отличающуюся по дальности: rq≠Dq, но связана с Dq нелинейной зависимостью, приемную систему фокусируют в точку Rpq, формируют индикаторную таблицу, для чего в каждой pq-й ячейке определяют значения взаимной корреляции Cmn(τmnR(pq)) всех пар антенн и считывают значений измеренных ПВКФ Cmn(τ) в точках τ=τmnR(pq), заполняя этими значениями ячейки индикаторной таблицы путем суммирования по индексу mn удвоенных значений Cmn(τmnR(pq)) и выходных значений квадратичного детектирования сигналов с выходов антенн и, полученную таким образом индикаторную таблицу выводят на индикатор с координатной сеткой и шкалами а координаты источников излучения определяют по положению главных максимумов их сигнальных отметок на шкалах координатной сетки. Технический результат: увеличение точности определения дальности при наличии нескольких источников и эффективности работы наблюдателя путем увеличения разрешающей способности сигнальных отметок источников излучения на индикаторной картине пассивного гидролокатора, ее постоянства и симметрии главного максимума во всем заданном интервале дальностей в ближней зоне поля источника излучения (зоне Френеля), без изменения формы сечения сигнальной отметки по направлению и без уменьшения се уровня. 2 з.п. ф-лы, 6 ил.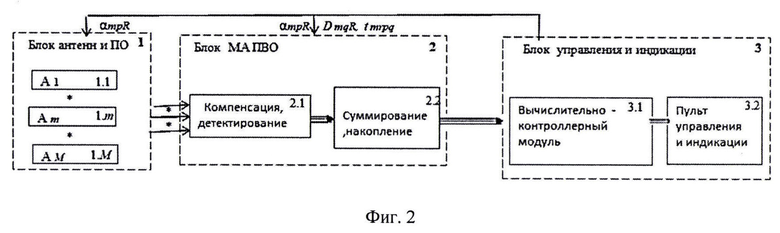
1. Способ пассивного определения координат источников излучения пассивным гидролокатором, содержащий прием сигнала широко-апертурной приемной системой из М разнесенных антенн (М≥3) в зоне Френеля, предварительную обработку, включающую: преобразование акустических сигналов в электрические, усиление, предварительную фильтрацию, дискретизацию и преобразование в частотную область, ориентацию характеристик направленности антенн в направлении ожидаемого расположения источника излучения, задание поля индикации с границами «αmin, αmax; Dmin, Dmax», и с координатной сеткой «направление α - дальность D»:: αр, Dq (р=1, …Р, q=1, …Q), с границами поля наблюдения «αmin≤αp≤αmax; Dmin≤Dq≤Dmax» и интервалами дискретности линейных шкал координатной сетки по направлению δα и дальности δD и Р×Q-канальную межантенную обработку, включающую: квадратичное детектирование выходных сигналов каждой антенны, измерение попарных взаимно-корреляционных функций (ПВКФ) Cmin(τ) каждой m-й антенны с другой, n-й антенной и формирование индикаторной таблицы с P×Q ячейками, которую выводят на индикатор с координатной сеткой и линейными шкалами α (градус) и D (метр), а координаты источников излучения определяют по положению главного максимума индикаторных значений сигнальных отметок на соответствующих шкалах координатной сетки, введены новые признаки: для каждой pq-й ячейки индикаторной таблицы определяют виртуальную точку фокусировки приемной системы Rpq с координатами <αр, rq>, совпадающую по направлению с αр и отличающуюся по дальности: r≠Dq, но связана с Dq нелинейной зависимостью, приемную систему фокусируют в точку Rpq, для чего вычисляют разность времен распространения сигнала τmnR(pq)=tmpqR-tnpqR из pq-й виртуальной точки Rpq к центрам каждой пары антенн Om, On по формулам тригонометрии, используя скорость звука в среде с, формируют индикаторную таблицу, для чего в каждой pq-й ячейке определяют значения взаимной корреляции Cmn(τmnR(pq)) всех пар антенн путем считывания значений измеренных ПВКФ Cmn(τ) в точках τ=τmnR(pq), и заполняют этими значениями ячейки индикаторной таблицы путем суммирования по индексу mn удвоенных значений Cmn(τmnR(pq)) и выходных значений квадратичного детектирования сигналов с выходов антенн и, полученную таким образом индикаторную таблицу выводят на индикатор с координатной сеткой и шкалами а координаты источников излучения определяют по положению главных максимумов их сигнальных отметок на шкалах координатной сетки.
2. Способ по п. 1, отличающийся тем, что нелинейная зависимость дальности rq до виртуальной точки фокусировки Rpq от дальности pq-го узла Dq определяется как rq=γ⋅Dq-1, где γ - масштабный коэффициент, определяемый из равенства rq=γм⋅Dq-1, при rq=Dq.
3. Способ по п. 1, отличающийся тем, что время задержки сигнала tmpqR=lmpqR/c каждой из М антенн для фокусировки приемной системы в pq-ю виртуальную точку Rpq, где lmpqR определяют по формулам тригонометрии как сторону RpqOm=lmpqR треугольника RpqOOm, где О - начало координат - центр приемной системы, Om - центр m-й антенны.
| Способ определения координат движущихся источников излучения пассивным гидролокатором | 2017 |
|
RU2658519C1 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 2012 |
|
RU2507531C1 |
| US 4910719 A1, 20.03.1990 | |||
| US 20100110834 A1, 06.05.2010 | |||
| DE 102007034054 A1, 22.01.2009. | |||

