Предлагаемое изобретение относится к области гидроакустики и может быть использовано в пассивной гидролокации в зоне излучения источника с круговым (сферическим, цилиндрическим) волновым фронтом, а также в атмосферной акустике и пассивной радиолокации. В этой области техники актуальной является задача обнаружения и определения координат слабого источника излучения в присутствии сильного мешающего источника.
Известен способ [1, с. 28] пассивного определения направления на источник излучения с подавлением сильного мешающего сигнала в основном пространственном канале (ОК), для чего используется «опорный луч», ориентированный на локальный мешающий источник. Для ориентации суммируют сигналы приемников антенны с введением временных задержек, компенсирующих разность времен распространения сигнала от излучателя к приемникам. Сигналы с сумматора «опорного луча» используют для вычитания (режекции) мешающего сигнала в выходном сигнале каждого приемника ОК. Преимуществом этого способа является подавление мешающего сигнала в основном канале, что обеспечивает повышение выходного отношения сигнал/помеха, обнаружение слабого сигнала и определение его параметров. Недостатком этого способа является то, что для его использования требуется априорное знание не только направления на мешающий сигнал, но и на искомый слабый источник, которое до его обнаружения может быть неизвестно. Другой недостаток в том, что метод предназначен для «очистки» одного пространственного канала и для определения только одной координаты - направления при плосковолновом фронте сигналов. Способ не предусматривает функцию обзора и обнаружения в секторе направлений и интервале дистанций. Определение этим способом всех координат, в том числе дальности до источника в пределах зоны Френеля его поля, невозможно.
Известен способ определения направления α на объект [2, с. 255] с использованием антенной решетки из М приемных элементов, расположенной в плосковолновой зоне поля источника, на выходах которых имеет место смесь полезного сигнала и некоррелированной с ним мешающей локальной помехи. Метод приема основан на формировании веера характеристик направленности в окрестностях основного, «очищаемого» направления приема и в направлении на мешающий источник, оценке суммарного помехового сигнала в очищаемом направлении от локальных помех с других направлений αj, и режекции (вычитании) его из процесса на выходе обычного устройства формирования характеристики направленности (ФХН). Преимуществом этого способа является повышение отношения сигнал/помеха слабого источника на выходе «очищаемого канала» и точности определения направления на него на фоне распределенной помехи и мешающего локального источника. Метод не требует априорного знания направления на слабый источник. Недостаток этого метода в том, что предназначен для «очистки» одного пространственного канала и для определения только одной координаты - направления при плосковолновом фронте сигналов. Определение этим способом всех координат, в том числе дальности до источника в зоне Френеля его поля, невозможно.
Известен «Способ пассивного определения координат движущегося источника излучения» [3], включающий функцию слежения по двум координатам с обратной связью приемной системой (ПС) из М антенн, М≥3, фокусирование антенн ПС в точку предполагаемого расположения источника - «опорную» точку (ОТ) и двухкоординатный дискриминатор отклонения точки фокусировки от фактического значения координат источника. «Опорную» точку на i-ом цикле получают путем динамического сглаживания последовательности измерений на предыдущих циклах и прогнозирования на текущий цикл известными методами сглаживания последовательностей [4] или рекуррентными методами (например «фильтр Калмана»). Преимущество данного способа в том, что он обеспечивает пассивное определение координат - направления и дальности, автоматическое сопровождение движущегося источника излучения М-антенной приемной системой в зоне Френеля и суммарный выходной сигнал ПС, сфокусированной в точку текущего положения сопровождаемого источника излучения. Недостатки данного способа заключаются в том, что он не обеспечивает функции наблюдения в поле обзора источников, интересующих оператора, а также надежного определения координат слабого источника в присутствии излучения сильного мешающего источника.
Наиболее близким к предлагаемому способу по совокупности общих признаков является «Способ пассивного определения координат источников излучения» [3], содержащий прием сигналов с круговым волновым фронтом линейной приемной системой (ПС) из М антенн (М≥3) с Nпр приемниками каждая, расположенных в пространстве известным образом, предварительную обработку включающую: синхронную дискретизацию, цифровое преобразование, циклическое дискретное преобразование Фурье (ПФ) выборок сигналов антенн объемом NПФ в массивы спектральных частотных отсчетов Xm(ƒk) в полосе приема ƒн≤ƒk≤ƒв, и двухкоординатный индикатор обзора в заданном секторе направлений <αmin, αmax> и интервале дальностей <Dmin, Dmax> с дискретной координатной сеткой (КС) <αр, Dq> размером P×Q. Для каждого pq-го узла координатной сетки вычисляют по формулам тригонометрии время распространения сигнала tm(αp, Dq, rm) к центрам каждой m-й антенны ПС с координатами ее центра rm, (m=1, …, М). По выборкам сигналов М антенн определяют (М2-М)/2 попарных функций взаимной корреляции (ПВКФ) Cmn(τ) сигналов пар антенн путем определения взаимных спектров плотности мощности (ПВКФ), умножения на коэффициент частотной характеристики hk и обратного преобразования Фурье всех ПВКФ и выполняют квадратичное детектирование выходных сигналов каждой антенны. Для каждого pq-го узла координатной сетки суммируют значения попарной взаимной корреляции сигналов всех (М2-М)/2 пар антенн путем считывания на шкале задержек τ (с применением интерполяции) значений полученных ПВКФ Cmn(τ) в точках τ=τmn(pq)=tm(αp, Dq, rm) - tn(αp, Dq, rn) и суммирования их удвоенного значения с результатами квадратичного детектирования сигналов каждой антенны, после чего все полученные суммарные значения для всех pq-x узлов выводят на координатную сетку индикатора. Координаты источников излучения определяют по положению максимумов сигнальных отметок на шкалах α и D координатной сетки индикатора.
Преимущество этого способа в том, что он обеспечивает одновременное наблюдение положения источников в двухкоординатном поле в заданных его границах по направлению и дальности. Недостатком является то, что при наличии в этом поле сильного мешающего источника (МИ) из-за высокого уровня боковых лепестков его сигнальной отметки сигнал слабого источника не наблюдается, не обнаруживается и определение его параметров невозможно.
Задачей изобретения является пассивное определение координат - направления и дальности слабого источника излучения М-антенной приемной системой в зоне Френеля при наличии в поле наблюдения сильного МИ.
Техническим результатом изобретения является обнаружение, наблюдение и определение координат (направления и дальности) местоположения слабого источника в зоне Френеля в присутствии сильного мешающего источника.
Для обеспечения указанного технического результата в способ пассивного определения координат источников гидроакустического излучения, включающий прием гидроакустических сигналов системой (ПС) из М антенн, М≥3, с Nпр приемниками каждая, расположенными в пространстве известным образом, предварительную обработку (ПО) сигналов приемников, образование на каждой антенне дискретного веера направленных каналов (НК) путем фазирования в направлениях αmp и суммирования на каждой частоте ƒk сигналов Nпр приемников каждой m-й антенны в секторе обзора αmin<αmp<αmax, (m=1, …, М, p=1, …, Р), и визуализацию на двухкоординатном индикаторе обзора в координатной сетке (КС) <αр, Dq> размером P×Q (q=1, …, Q) с предварительным расчетом взаимной разности времен прихода сигнала к центрам каждой пары m-й и n-й антенн τmn(pq)=tm(αp,Dq,rm) - tn(αp,Dq, rn), введены следующие новые признаки: с выходов ПО приемников каждой из антенн ПС выполняют измерение мешающего сигнала (МИ), путем фокусирования ПС в точку текущего расположения МИ, для чего применяют измерение и автоматическое слежение за изменяющимися координатами МИ, а затем суммирование сфокусированных сигналов приемников ПС, выполняют режекцию выходных сигналов НК каждой антенны ПС от сигнала МИ путем взвешенного вычитания измеренного мешающего сигнала из выходных сигналов НК с весовыми коэффициентами, равными отношению оценки взаимного спектра плотности мощности сигналов каждого НК с сигналом МИ, на каждой частоте ƒk, к оценке спектра плотности мощности сигнала МИ, после чего формируют двухкоординатный индикаторный массив (ИМ) путем суммирования в каждой pq-й его ячейке результатов попарного перемножения на каждой частоте ƒk сигналов с выходов каждого р-го НК m-й антенны на комплексно-сопряженный сигнал р-го НК n-й антенны с компенсацией взаимных разностей времен прихода сигнала из pq-й точки расположения МИ к центрам каждой пары m-й и n-й антенн и выводят его на индикатор, а координаты искомого слабого источника излучения определяют по положению максимума сигнальной отметки, полученной предлагаемым здесь способом, на шкалах α и D координатной сетки индикатора.
При измерении сигнала МИ целесообразно фазировать ПС в точку предполагаемого на данный момент расположения МИ <αmМИ, DМИ>, для чего на каждом цикле ПФ все приемники каждой m-й антенны сначала компенсируют традиционным способом, как для плосковолнового поля сигнала на направлениях αmМИ и суммируют, получая вектор сигналов М антенн, направленных на МИ, затем вычисляют по формулам тригонометрии время tm(αmМИ, DМИ, rm) распространения сигнала от МИ к центрам каждой антенны ПС с координатами rm(m=1, …, М), фазируют в точку <αmМИ, DМИ> эти суммарные сигналы М антенн, с коэффициентом компенсации времен tm(αmМИ, DМИ, rm) и суммируют их, получая сфокусированный сигнал ПС из предполагаемой точки расположения МИ.
Для отслеживания текущих координат точки предполагаемого расположения МИ <αmМИ, DМИ>, если она перемещается, может быть использовано фокусирование антенн ПС в предполагаемую на данном i-м цикле ПФ точку расположения МИ <αопi, Dопi> {«опорную» точку (ОТ), получаемую путем динамического сглаживания [4] измерений по предыдущим циклам ПФ} и оценку величин δαi, δDi отклонения координат ОТ от неизвестного фактического значения координат МИ, используя выборку сигнала Xi текущего цикла ПФ и двухкоординатный дискриминатор направления αМИ и дальности DМИ. Определяют оценки αi*, Di*, корректируя αопi, Dопi на величину δαi, δDi, соответственно, а текущие координаты источника излучения αМИ(ti), DМИ(ti) на момент i-го цикла и прогноз опорных значений αопi+1, Dопi+1 на следующий (i+1)-й цикл определяют по результатам динамического сглаживания [4] последовательностей оценок координат на предыдущих циклах.
Для определения оценок отклонения δαi, δDi, на i-ом цикле ПФ используют (M2-M)/2 нечетных попарных взаимно-корреляционных функций (НВКФ) С'mni (τ) сигналов m-ых и n-ых антенн (m, n=1, …, М, m<n) на дискретной шкале задержек τ, для чего определяют комплексные частотные элементы взаимного спектра плотности мощности (ВСПМ) каждой mn-й пары антенн i-го цикла, умножают на коэффициент частотной характеристики hk и на частоту ƒk, выполняют их осреднение за J циклов ПФ, отдельно для реальной и мнимой части, и выполняют обратное преобразование Фурье. Затем сканируют величины α=αr по r=±1, 2, … и D=Ds по s=±1, 2, … в окрестностях αопi и Dопi с заданным шагом Δα и ΔD соответственно, определяя по формулам тригонометрии в каждой точке сканирования значения τmni(αr, Dопi) и τmni(αопi, Ds) соответственно, весовые коэффициенты и wαmnr и wDmns, равные производным wαmnr=∂τmn(αr, Dопi)/∂α и wDmns=∂τmn(αопi, Ds)/∂D соответственно, и выходные значения дискриминаторов zα(αr) и zD(Ds) соответственно, находят положения нулевых значений  на шкалах α и D соответственно (используя интерполяцию) а отклонения δαi и δDi, определяют по отстоянию положения нулевых точек
на шкалах α и D соответственно (используя интерполяцию) а отклонения δαi и δDi, определяют по отстоянию положения нулевых точек  и
и  от опорных значений αопi, Dопi на шкалах α=αr и D=Ds соответственно.
от опорных значений αопi, Dопi на шкалах α=αr и D=Ds соответственно.
Выходные значения дискриминаторов zα(αr) и zD(Ds) определяют путем считывания значений  в точках τ=τα=τmni(αr, Dопi) и τ=τD=τmni(αопi, Ds) соответственно (используя интерполяцию), и суммирования их по индексу mn в каждой точке αr и Ds с весовыми коэффициентами wαmnr и wDmns соответственно.
в точках τ=τα=τmni(αr, Dопi) и τ=τD=τmni(αопi, Ds) соответственно (используя интерполяцию), и суммирования их по индексу mn в каждой точке αr и Ds с весовыми коэффициентами wαmnr и wDmns соответственно.
Для режекции сигнала МИ из выходных сигналов НК целесообразно на каждом i-м цикле ПФ выполнить оценку спектра плотности мощности (СПМ) Pok сигнала МИ и взаимных спектров плотности мощности (ВСПМ) сигналов каждого НК с сигналом МИ Compk путем умножения на каждой частоте ƒk сигнала с выхода сумматора МИ yoki на его сопряженное значение y*oki и затем осреднения за время Тн, а измерения ВСПМ Compk производят путем умножения сигнала с выхода каждого р-го НК m-й антенны ympk(t) на комплексно-сопряженный сигнал с выхода сумматора МИ y*ok(t) и осреднения за время Режекцию выходных сигналов с сумматоров НК целесообразно выполнить на текущем цикле ПФ путем вычитания сигнала с выхода сумматора МИ из выходных сигналов НК на каждой частоте ƒk с коэффициентом, равным отношению величины ВСПМ сигналов каждого mp-го НК Compk к величине оценки СПМ сигнала МИ Pok.
Сигналы НК, «очищенные» от сильной помехи, можно использовать для формирования двухкоординатного индикаторного массива. Например, путем попарного перемножения на i-ом цикле ПФ на каждой частоте ƒk сигналов с выходов каждого p-го НК m-й антенны на комплексно-сопряженный сигнал р-го НК n-й антенны с умножением на коэффициент частотной характеристики hk и на коэффициент компенсации разности времен прихода сигнала к центрам m-й и n-й антенн. Затем выполняют суммирование по частоте ƒk (т.е. по k) и по индексу mn для каждого pq-го узла координатной сетки. Затем ИМ накапливают за заданное время Т (заданное число циклов ПФ) и выдают на индикатор, а координаты источника излучения определяют по положению максимума сигнальной отметки, полученной предлагаемым способом, на шкалах α и D координатной сетки индикатора.
Новизна предлагаемого решения заключается в том, что в известном способе пассивного определения координат источников излучения, содержащем прием сигналов М антеннами, М≥3, предварительную обработку сигналов приемников, образование на каждой антенне дискретного веера направленных каналов (НК) на каждой m-й антенне в направлениях αmp в секторе обзора и визуализацию на двухкоординатном индикаторе обзора в координатной сетке (КС) <αр, Dq> используют измерение сигнала сильного мешающего источника (МИ), путем слежения за точкой текущего расположения МИ и фокусирования ПС в эту точку <αo, Do>. Суммарный выходной сигнал измерения МИ используют для режекции мешающего сигнала в основных каналах. Для этого на каждой антенне ПС с выходов сумматора измерения МИ выполняют измерение спектра плотности мощности (СПМ) Pok(αo), а с выходов сумматоров НК антенн измеряют взаимные спектры плотности мощности (ВСПМ) Cmok(αр) сигнала с выхода каждого р-го НК m-й антенны с сигналом с выхода сумматора измерения МИ. Сигналы с выходов всех каналов измерения Pok(αo) и Cmok(αр) усредняют в течение заданного разработчиком времени накопления Tн. На каждом i-ом цикле ПФ в каждом из М × Nпк НК на каждой частоте ƒk производят режекцию сигнала сильного МИ путем вычитания его из сигнала с выхода сумматора каждого НК с коэффициентом, равным отношению Cmok(αp) к Pok(αоп):

Двухкоординатный индикаторный массив организуют путем попарного перемножения на i-ом цикле ПФ и обработки на каждой частоте ƒk сигналов с выходов каждого р-го НК m-й антенны на комплексно-сопряженный сигнал р-го НК n-й антенны с умножением на коэффициент частотной характеристики hk и на коэффициент компенсации разности времен прихода сигнала к центрам m-й и n-й антенн и затем суммирования по частоте ƒk (т.е. по k), затем суммирования по индексу mn для каждого pq-го узла координатной сетки:

Затем ИМ накапливают за заданное время Т (заданное число циклов ПФ) и выводят его на индикатор, а координаты источника излучения определяют по положению максимума сигнальной отметки, полученной предлагаемым способом, на шкалах α и D координатной сетки индикатора.
Введение новых признаков обеспечивает пассивное обнаружение, наблюдение и определение координат (направления и дальности) слабого источника излучения М-антенной ПС в зоне Френеля при наличии в поле наблюдения сильного мешающего источника.
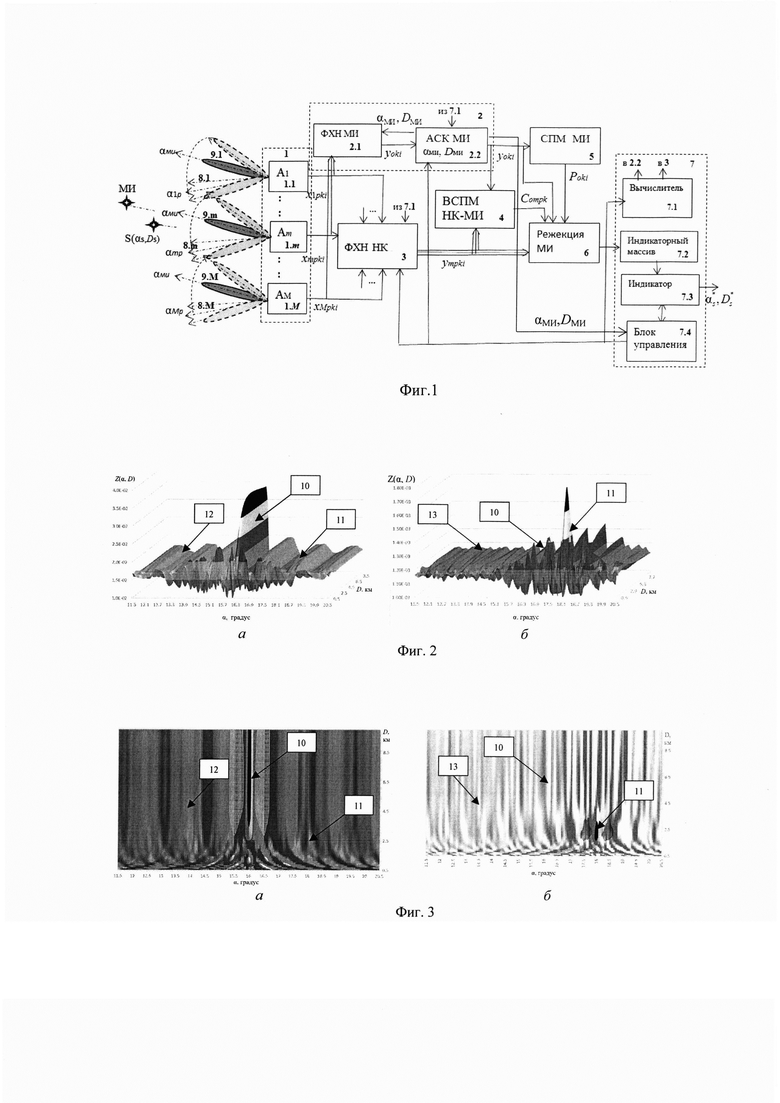
Сущность изобретения поясняется рисунками фиг. 1÷4. На фиг. 1 показана схема устройства пассивного определения координат источника гидроакустического излучения, реализующего предлагаемый способ. На фиг. 2 - аксонометрическое изображение индикаторного массива при наличии в поле наблюдения двух источников излучения с обработкой по способу прототипа (а) и по предлагаемому способу (б). На фиг. 3 - индикаторная картина при обработке по способу прототипа (а) и по предлагаемому способу (б). На фиг 2 и 3: 10 - главный лепесток сигнальной отметки МИ (на фиг. 2б он режектирован), 11 - место расположения сигнальной отметки (СО) источника S (на фиг. 2а и 3а он не наблюдается, подавлен помехой), 12 - поле суммарной помехи (фоновый шум акватории + шум МИ), 13 - поле фонового шума (он виден на фиг. 2б и 3б, т.к. шум МИ режектирован). На фиг. 4 - сечения индикаторного массива: а- по направлению α и б - по дальности D при обработке по способу прототипа (верхние графики, с шумом МИ) и по предлагаемому способу (нижние графики, где шум МИ режектирован). Для наглядности графики обработки по прототипу (верхние) и по предлагаемому способу (нижние) приведены на одной шкале и в логарифмическом масштабе.
Устройство (фиг. 1), реализующее заявленный способ содержит: 1 - ПС из М антенн А1÷АМ с Nпр приемниками каждая и с модулями предварительной обработки; 2 - канал измерения МИ, включающий: формирователь 2.1 характеристик направленности (ФХН) антенн ПС в направлении αМИ и фазирование ПС в точку <αМИ, DМИ> и двухкоординатный дискриминатор 2.2 определения и слежения за координатами МИ; 3 - формирователь характеристик направленности вееров НК 8.1÷8.М на каждой антенне, 9.1÷9М - направления на МИ характеристик направленности измерения МИ на каждой антенне; 4 - модуль оценки ВСПМ сигналов с выходов НК с сигналом с выхода измерения МИ; 5 - модуль оценки СПМ сигнала МИ Pok(αo); 6 - модуль режекции сигнала МИ из сигналов НК; 7 - блок формирования индикаторного массива: 7.1 - вычислитель, 7.2 - блок формирования индикаторного массива, 7.3 - индикатор, 7.4 - блок управления.
Реализацию предлагаемого способа пассивного определения координат источника гидроакустического излучения удобно показать на примере работы устройства, схема которого изображена на фиг. 1.
Приемная система ПС 1 из М антенн (А1÷АМ) по Nпр элементов каждая принимает акустические сигналы, содержащие распределенные шумы акватории и шумы локальных источников излучения, преобразует их в электрические сигналы и подвергает предварительной обработке, включающей: синхронную дискретизацию, цифровое преобразование, циклическое дискретное преобразование Фурье в полосе приема ƒн≤ƒk≤ƒв. Эти сигналы поступают параллельно на входы ФХН МИ 2.1 блока 2 и на блок 3 - формирования вееров ФХН НК на каждой антенне.
Блок 2 осуществляет измерение сигнала ПС, сфокусированной в точку расположения сильного МИ, и автоматическое слежение за его координатами (АСК МИ). АСК МИ не подвержен преобразованиям сигналов, производимых далее в НК. Автоматически определяемые и сопровождаемые координаты МИ αМИ, DМИ передаются в блок управления 7.4.
В блоке 3 на каждой антенне выполняется формирование вееров ХН НК, каждый из которых скомпенсирован на одно из дискретных направлений αр в заданном поле обзора αmin<αp<αmax.
С выходов блока 2 измерения МИ сигналы ПС, сфокусированной в точку расположения МИ поступают в блок 5 - измерения спектра плотности мощности (СПМ) Pok(αo), в блок 4 измерения взаимных спектров плотности мощности (ВСПМ) Cmok(αр) сигналов с выходов каждого р-го НК m-й антенны с сигналом с выхода сумматора МИ с осреднением их за заданное время Тн, и в блок 6 - режекции МИ.
С выходов сумматоров ФХН НК блока 3 поступают в блок 4 и в блок 6, где на каждом цикле ПФ выполняют режекцию (на всех частотах ƒk) сигнала МИ из сигналов всех НК всех антенн путем вычитания сигнала МИ с весом Pok(αo)/Cmok(αp) из сигналов НК. «Очищенные» таким образом сигналы ПК всех антенн ПС поступают в блок 7, где в 7.2 выполняют формирование индикаторного массива, индикацию 7.3 и определение координат источника по шкалам координатной сетки индикатора и управление 7.4, обеспечивающее назначение некоторой сигнальной отметки (СО) как МИ, сектор поиска в ее окрестностях СО слабых источников и управление параметрами основного канала 3÷7.
Работоспособность предлагаемого способа пассивного определения координат иллюстрирует численный пример, визуальные и количественные результаты которого показаны на рисунках и графиках фиг. 2-4.
В численном примере использованы:
Количество антенн М=5; Базовый размер ПС В = 60 м (4×15 м); Число приемников в каждой антенне Nпр=20, интервал между приемниками d≈λв/2, где λв - длина волны на верхней частоте диапазона приема.
Координаты МИ: <16°, 6.0 км> ; координаты интересующего слабого источника <18°, 2.2 км>
В точке приема уровень МИ больше уровня S в 6 раз (по напряжению), полоса частот слабого сигнала и МИ 3.0÷8.0 кГц.
Соотношение уровней сигналов (S и МИ) и фоновой распределенной помехи в точке приема: ps/pф=0.5; рМИ/pф=3.
Результат режектирования сильного МИ по предлагаемому способу:
- уменьшение уровня СО сильного МИ и поля его боковых лепестков в ≈22 раза, практически до уровня фоновой помехи (фиг. 2, 3).
- Уменьшение уровня суммарной помехи (фоновой + шум МИ) в секторе наблюдения в ≈25.12 раза (фиг. 4), возможность наблюдения и других слабых источников в этом секторе. Следует подчеркнуть, что блок 2 фиг. 1 автоматического слежения за координатами МИ не подвержен преобразованиям подавления МИ, производимых далее в блоках 3,4 и 6 и выдает неискаженные данные о МИ в блок управления 7.4.
- Устойчивое восстановление СО слабого сигнала интересующего источника на индикаторе и определение его координат: фиг. 4а - направления, 4б - дальности, нижние графики.
Использованные источники
1. Г.С. Малышкин. Оптимальные и адаптивные методы обработки гидроакустических сигналов. Том 1. Сс. 33-43. СПб, ОАО «Концерн «Электроприбор». 2011.
2. Способ пассивного определения координат движущегося источника излучения. Патент №2507831. Россия. ОАО «Концерн «Океанприбор». МПК J01S 3/80. Дата регистрации 29.06.2017 г.
3. Способ пассивного определения координат источников излучения. Патент №2507531. Россия. ОАО «Концерн «Океанприбор». МПК G01S 3/80. Приоритет 08.11.2012, зарегистрирован 20.02.14 г.
4. Кузьмин С.З. Цифровая обработка радиолокационной информации. М.: Сов. радио. 1967.

Изобретение относится к области гидроакустики и может быть использовано в пассивной гидролокации в зоне излучения источника с круговым (сферическим, цилиндрическим) волновым фронтом, а также в атмосферной акустике и пассивной радиолокации. Актуальной задачей в этих областях техники является наблюдение и определение координат - направления и дальности слабого источника в присутствии сильного мешающего источника. Для решения этой задачи предлагается способ пассивного определения координат источников излучения, содержащий прием сигналов М антеннами, М≥3, расположенными в пространстве известным образом, предварительную обработку сигналов приемников и двухкоординатный индикатор поля обзора. С выходов приемников ПС организуют канал измерения и слежения за координатами сильного МИ <αo, Do> и основной канал. На каждой антенне ПС с выходов сумматора сопровождения МИ организуют измеритель спектра плотности мощности (СПМ) Pok и формируют веер из Nпк направленных каналов (НК) и с выходов сумматоров НК основного канала организуют измерители взаимных спектров плотности мощности (ВСПМ) Cmpk сигнала с выхода каждого р-го НК m-й антенны с сигналом с выхода сумматора МИ. В каждом из М × Nпк НК на каждой частоте ƒk производят режекцию сигнала сильного мешающего источника. Сигналы НК, «очищенные» таким образом от сильной помехи, используют для формирования известным способом (прототип) двухкоординатного индикаторного массива для обнаружения сигнальной отметки слабого источника и определения его координат по положению ее максимума на координатных шкалах индикатора. 7 з.п. ф-лы, 4 ил.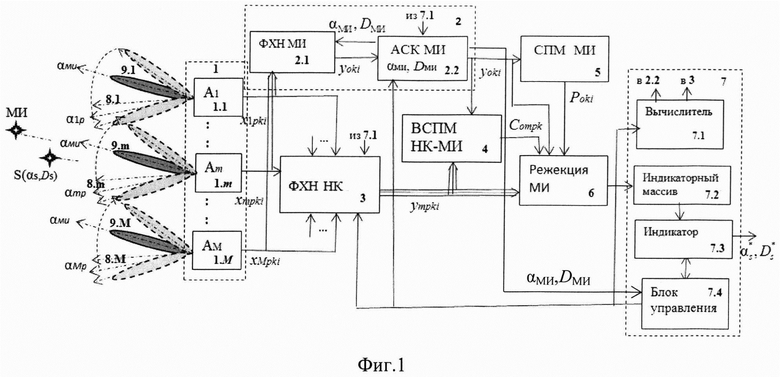
1. Способ пассивного определения координат источников гидроакустического излучения, включающий прием гидроакустических сигналов системой (ПС) из М антенн, М≥3, с Nпр приемниками каждая, расположенными в пространстве известным образом, предварительную обработку (ПО) сигналов приемников, образование на каждой антенне дискретного веера направленных каналов (НК) путем фазирования в направлениях αmp и суммирования на каждой частоте ƒk сигналов Nпр приемников каждой m-й антенны в секторе обзора αmin<αmp<αmax, (m=1, …, М, р=1, …, Р), и визуализацию на двухкоординатном индикаторе обзора в координатной сетке (КС) <αр, Dq> размером P×Q (q=1, …, Q) с предварительным расчетом взаимных разностей времен прихода сигнала к центрам каждой пары m-й и n-й антенн τmn(pq)=tm(αp,Dq,rm)-tn(αp,Dq rn), отличающийся тем, что с выходов ПО приемников каждой из антенн ПС выполняют измерение мешающего сигнала (МИ), путем фокусирования ПС в точку текущего расположения МИ, для чего применяют измерение и автоматическое слежение за изменяющимися координатами МИ, а затем суммирование сфокусированных сигналов приемников ПС, выполняют режекцию выходных сигналов НК каждой антенны ПС от сигнала МИ путем взвешенного вычитания измеренного мешающего сигнала из выходных сигналов НК с весовыми коэффициентами, равными отношению оценки взаимного спектра плотности мощности сигналов каждого НК с сигналом МИ на каждой частоте ƒk, к оценке спектра плотности мощности сигнала МИ, после чего формируют двухкоординатный индикаторный массив (ИМ) путем суммирования в каждой pq-й его ячейке результатов попарного перемножения на каждой частоте ƒk сигналов с выходов каждого р-го НК m-й антенны на комплексно-сопряженный сигнал p-го НК n-й антенны с компенсацией взаимных разностей времен прихода сигнала из pq-й точки расположения МИ к центрам каждой пары m-й и n-й антенн и выводят его на индикатор, а координаты искомого слабого источника излучения определяют по положению максимума сигнальной отметки, полученной предлагаемым здесь способом, на шкалах α и D координатной сетки индикатора.
2. Способ по п. 1, отличающийся тем, что при измерении сигнала МИ фазируют ПС в точку предполагаемого на данный момент расположения МИ <αmМИ, DМИ>, для чего на каждом цикле ПФ все приемники каждой m-й антенны компенсируют на свое направление αmМИ и суммируют, получая вектор сигналов М антенн, направленных на МИ, затем вычисляют по формулам тригонометрии время tm(αmМИ, DМИ, rm) распространения сигнала от МИ к центрам каждой антенны ПС с координатами rm (m=1,…,М), фазируют в точку <αmМИ, DМИ> эти суммарные сигналы М антенн, с коэффициентом компенсации времен tm(αmМИ, DМИ, rm) и суммируют их, получая сфокусированный сигнал ПС из предполагаемой точки расположения МИ.
3. Способ по п. 1 или 2, отличающийся тем, что для отслеживания текущих координат точки предполагаемого расположения МИ <αmМИ, DМИ>, если она перемещается, используют фокусирование антенн ПС в предполагаемую на данном i-м цикле ПФ точку расположения МИ <αопi, Dопi> и оценку величин δαi, δDi отклонения координат МИ от неизвестного фактического значения координат МИ, используя выборку сигнала Хi текущего цикла ПФ и двухкоординатный дискриминатор направления αМИ и дальности DМИ, определяют оценки 
 корректируя αопi, Dопi на величину δαi, δDi соответственно, а текущие координаты источника излучения αМИ(ti), DМИ(ti) на момент i-го цикла и прогноз опорных значений αопi+1, Dопi+1 на следующий (i+1)-й цикл определяют по результатам динамического сглаживания последовательностей оценок координат на предыдущих циклах.
корректируя αопi, Dопi на величину δαi, δDi соответственно, а текущие координаты источника излучения αМИ(ti), DМИ(ti) на момент i-го цикла и прогноз опорных значений αопi+1, Dопi+1 на следующий (i+1)-й цикл определяют по результатам динамического сглаживания последовательностей оценок координат на предыдущих циклах.
4. Способ по п.3, отличающийся тем, что для определения оценок отклонения δαi, δDi на i-ом цикле ПФ используют (M2-М)/2 нечетных попарных взаимно-корреляционных функций  сигналов m-ых и n-ых антенн (m, n=1, …, М, m<n) на дискретной шкале задержек τ, для чего определяют комплексные частотные элементы взаимного спектра плотности мощности каждой mn-й пары антенн i-го цикла, умножают на коэффициент частотной характеристики hk и на частоту ƒk, выполняют их осреднение за J циклов ПФ, отдельно для реальной и мнимой части, и выполняют обратное преобразование Фурье, затем сканируют величины α=αr по r=±1, 2, … и D=Ds по s=±1, 2, … в окрестностях αопi и Dопi с заданным шагом Δα и ΔD соответственно, определяя по формулам тригонометрии в каждой точке сканирования значения попарных разностей времен прихода сигнала tm(αmМИ, DМИ, rm) к центрам m-й и n-ой антенн τmni(αr, Dопi) и τmni(αопi, Ds) соответственно, весовые коэффициенты wαmnr и wDmns, равные производным wαmnr=∂τmn(αr, Dопi)/∂α и wDmns=∂τmn(αопi, Ds)/∂D соответственно, и выходные значения дискриминаторов zα(αr) и zD(Ds) соответственно, находят положения нулевых значений
сигналов m-ых и n-ых антенн (m, n=1, …, М, m<n) на дискретной шкале задержек τ, для чего определяют комплексные частотные элементы взаимного спектра плотности мощности каждой mn-й пары антенн i-го цикла, умножают на коэффициент частотной характеристики hk и на частоту ƒk, выполняют их осреднение за J циклов ПФ, отдельно для реальной и мнимой части, и выполняют обратное преобразование Фурье, затем сканируют величины α=αr по r=±1, 2, … и D=Ds по s=±1, 2, … в окрестностях αопi и Dопi с заданным шагом Δα и ΔD соответственно, определяя по формулам тригонометрии в каждой точке сканирования значения попарных разностей времен прихода сигнала tm(αmМИ, DМИ, rm) к центрам m-й и n-ой антенн τmni(αr, Dопi) и τmni(αопi, Ds) соответственно, весовые коэффициенты wαmnr и wDmns, равные производным wαmnr=∂τmn(αr, Dопi)/∂α и wDmns=∂τmn(αопi, Ds)/∂D соответственно, и выходные значения дискриминаторов zα(αr) и zD(Ds) соответственно, находят положения нулевых значений 
 и
и  на шкалах α и D соответственно, а отклонения δαi и δDi определяют по отстоянию положения нулевых точек
на шкалах α и D соответственно, а отклонения δαi и δDi определяют по отстоянию положения нулевых точек  и
и  от опорных значений αопi, Dопi на шкалах α=αr и D=Ds соответственно.
от опорных значений αопi, Dопi на шкалах α=αr и D=Ds соответственно.
5. Способ по п.4, отличающийся тем, что выходные значения дискриминаторов zα(αr) и zD(Ds) определяют путем считывания значений  в точках τ=τα=τmni(αr, Dопi) и τ=τD=τmni(αопi, Ds) соответственно (используя интерполяцию) и суммирования их по индексу mn в каждой точке αr и Ds с весовыми коэффициентами wαmnr и wDmns соответственно.
в точках τ=τα=τmni(αr, Dопi) и τ=τD=τmni(αопi, Ds) соответственно (используя интерполяцию) и суммирования их по индексу mn в каждой точке αr и Ds с весовыми коэффициентами wαmnr и wDmns соответственно.
6. Способ по п. 1 или 2, отличающийся тем, что для режекции сигнала МИ из выходных сигналов НК на каждом i-м цикле ПФ выполняют оценку спектра плотности мощности Pok сигнала МИ и взаимных спектров плотности мощности сигналов каждого НК с сигналом МИ Соmpk путем умножения на каждой частоте ƒk сигнала с выхода сумматора МИ уoki на его сопряженное значение  и затем осреднения за время Tн, а измерения ВСПМ Соmpk выполняют путем умножения сигнала с выхода каждого р-го НК m-й антенны ympk(t) на комплексно-сопряженный сигнал с выхода сумматора МИ
и затем осреднения за время Tн, а измерения ВСПМ Соmpk выполняют путем умножения сигнала с выхода каждого р-го НК m-й антенны ympk(t) на комплексно-сопряженный сигнал с выхода сумматора МИ  и осреднения за время Тн.
и осреднения за время Тн.
7. Способ по п.6, отличающийся тем, что режекцию выходных сигналов с сумматоров НК выполняют на текущем цикле ПФ путем вычитания сигнала с выхода сумматора МИ из выходных сигналов НК на каждой частоте ƒk с коэффициентом, равным отношению величины ВСПМ сигналов каждого omp-го НК Соmpk к величине оценки СПМ сигнала МИ Рok.
8. Способ по п. 1, или 6, или 7 отличающийся тем, что сигналы НК, «очищенные» от сильной помехи, используют для формирования двухкоординатного индикаторного массива, путем попарного перемножения на i-ом цикле ПФ на каждой частоте ƒk сигналов с выходов каждого р-го НК m-й антенны на комплексно-сопряженный сигнал p-го НК n-й антенны с умножением на коэффициент частотной характеристики hk и на коэффициент компенсации разности времен прихода сигнала к центрам m-й и n-й антенн τmn(pq) и затем суммирования по частоте ƒk и по индексу mn для каждого pq-го узла координатной сетки, после чего ИМ накапливают за заданное время Т (заданное число циклов ПФ) и выдают на индикатор, а координаты источника излучения определяют по положению максимума сигнальной отметки, полученной предлагаемым способом, на шкалах α и А координатной сетки индикатора.
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 2012 |
|
RU2507531C1 |
| Способ определения координат движущихся источников излучения пассивным гидролокатором | 2017 |
|
RU2658519C1 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ | 2016 |
|
RU2623831C1 |
| Способ определения местоположения объектов гидроакустической пассивной системой в условиях многомодового распространения звука | 2017 |
|
RU2667330C1 |
| ПАССИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 1989 |
|
SU1841037A1 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| US 5805525 A1, 08.09.1998. | |||

