Изобретение представляет собой роботизированный комплекс для проведения автоматизированного ультразвукового сканирования, основанного на разделении процессов сбора данных и анализа результатов.
Известны система и способ для проведения пункционной биопсии предстательной железы под ультразвуковым контролем в режиме реального времени с использованием совместимой роботизированной руки (Патент US 10368850), в котором предусмотрены системы и способы для использования изображения МРТ и ультразвуковых изображений в реальном времени для направления и/или ограничения перемещения ультразвукового зонда в положении для сбора биопсийного материала. Ультразвуковое изображение в режиме реального времени получают и объединяют с предоперационными методами визуализации, такими как МРТ-изображение, для получения трехмерной модели предстательной железы. Многорычажная роботизированная рука снабжена концевым эффектором и установленным на нем ультразвуковым зондом. Информация датчика используется для отслеживания положения ультразвукового зонда относительно 3D-модели. Роботизированная рука позволяет реализовать виртуальный удаленный центр движения (VRCM) вокруг наконечника трансректального зонда, регулируемый режим соответствия для движения зонда, инициируемого врачом, ограничительную траекторию суставов роботизированной руки и активную блокировку для стационарной визуализации предстательной железы.
Также известно роботизированное устройство для позиционирования хирургического инструмента относительно тела пациента (Патент US 10667876), включающее в себя первую роботизированную руку с устройством для жесткого соединения, по меньшей мере, с одним хирургическим инструментом, устройство для анатомической перестройки первой руки путем перестройки изображения, представляющего собой область анатомии пациента, и устройство для компенсации движений первой руки на основе обнаруженных движений. Один вариант устройства включает в себя, по меньшей мере, одну вторую роботизированную руку, имеющую датчики для обнаружения внутренних движений анатомической области, и устройство для управления позиционированием первой руки относительно обнаруженных внутренних движений и внешних движений, вызванных во второй руке.
Также известна система MELODY Expert (источник информации по ссылке: https://www.adechotech.com/products/) с дистанционным управлением ультразвуковым зондом на основе роботизированной руки, при этом результат ультразвукового изображения выводится на экран в режиме реального времени.
Наиболее близким способом роботизированного исследования является способ работы роботизированной ультразвуковой системы MGIUS-R3 (источник информации по ссылке: https://en.mgi-tech.com/products/instruments_info/11/), заключающийся в проведении ультразвукового исследования на основе дистанционного управления шестиосным роботом-манипулятором, повторяющим движения врача-специалиста.
Недостатком указанного способа является отсутствие возможности проведения автоматизированного ультразвукового сканирования и разделения процессов сбора данных и анализа результатов.
Технический результат заключается в решении ряда ключевых проблем ультразвуковой диагностики:
- выраженная оператор-зависимость, то есть необходимость физического присутствия врача непосредственно во время проведения исследования;
- слабая стандартизация и формализация ультразвукового сканирования;
- отсутствие в рутинной практике УЗИ сбора и накопления первичной информации;
- увеличенная длительность процедуры из-за необходимости многократных повторных манипуляций врача во время исследования;
- риск заражения врача из-за необходимости нахождения в непосредственной близости от зараженного пациента или пациента с потенциальным риском заражения;
- высокая стоимость процедуры из-за дорогостоящих специалистов.
Техническим результатом заявляемого изобретения является автоматизированный процесс проведения ультразвукового исследования, а также обеспечение получения структурированных данных ультразвукового исследования для последующей удаленной обработки и анализа результатов исследования.
Технический результат достигается за счет того, что заявленный способ автоматизированного ультразвукового сканирования RoboScan согласно заявляемому техническому решению заключается в использовании роботизированного комплекса для проведения автоматизированного ультразвукового сканирования, основанного на разделении процессов сбора данных - реализация программы (сценария) автоматизированного сканирования анатомической области, сохранение исходных данных УЗИ в формате DICOM и передача их на сервер, и анализа результатов - изучение исходных данных УЗИ врачом, проведение измерений, составление описания и формирование заключения, а также применении технологий искусственного интеллекта для обработки ультразвуковых изображений на базе накопленных результатов ультразвукового сканирования (формализованные исходные данные УЗИ в формате DICOM вместе с их формализованным описанием в электронном виде).
Изобретение поясняется изображениями:
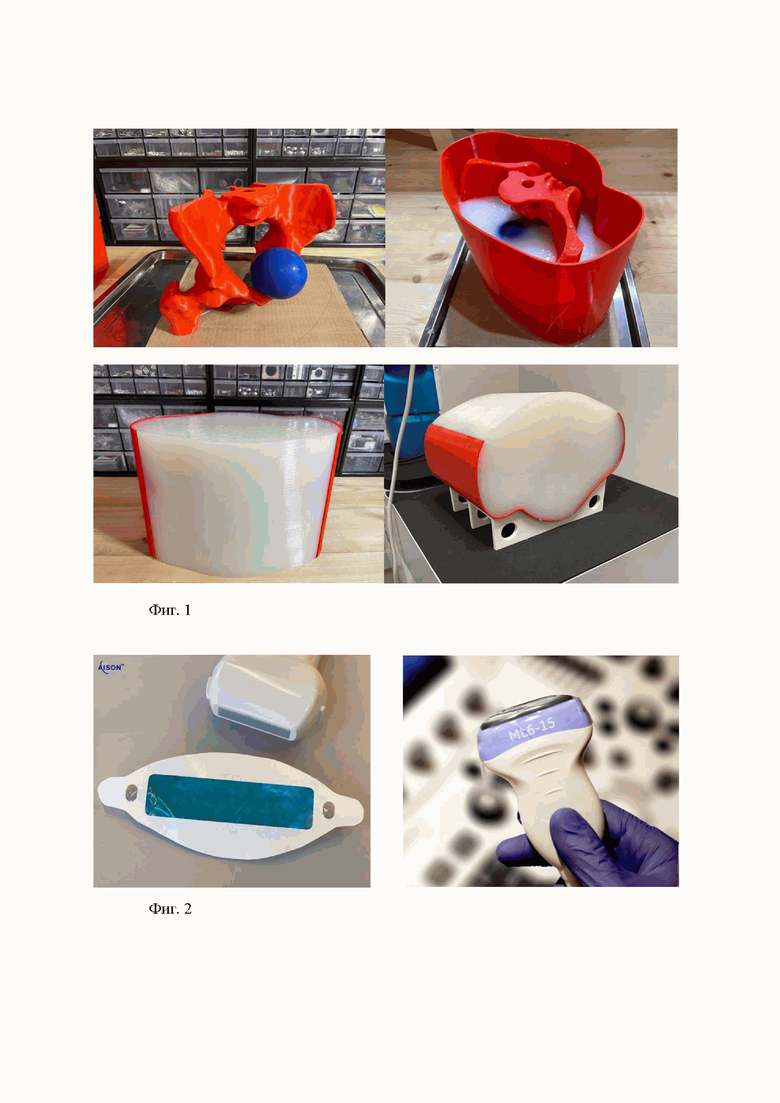
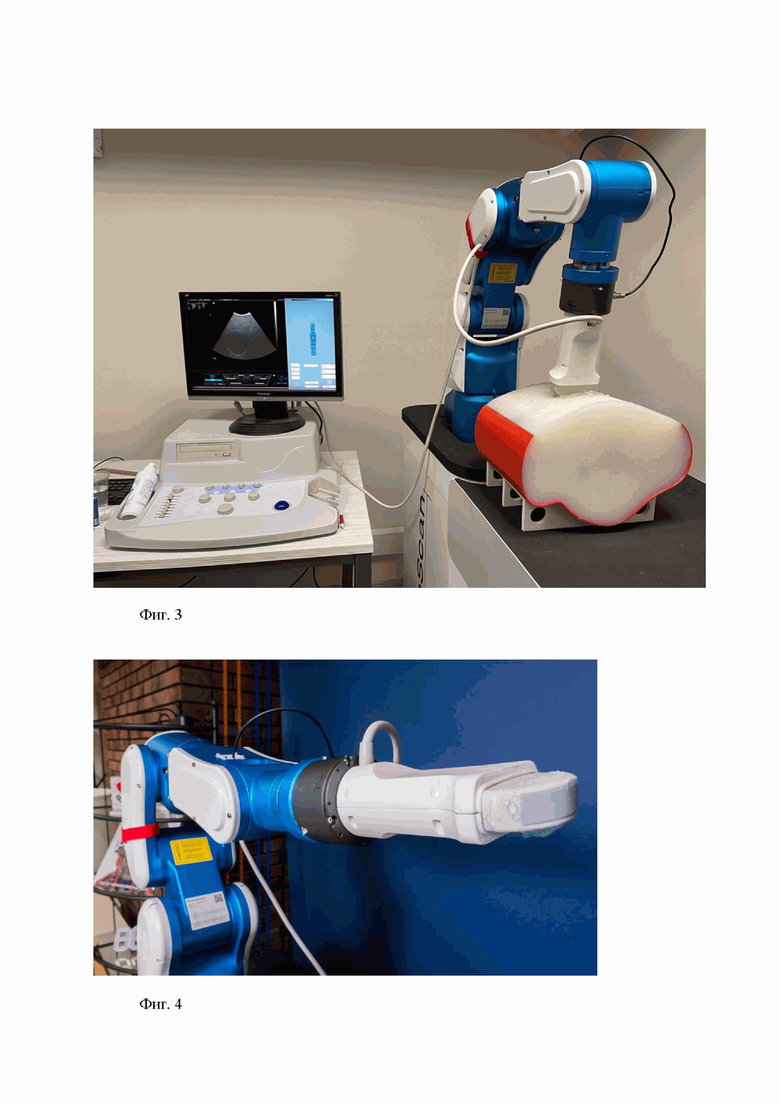
фиг. 1. - манекен малого таза с артифициальным мочевым пузырем и предстательной железой; фиг. 2. - пример специализированная накладка FOCUS на ультразвуковой датчик, производимой швейцарской компанией aiSon; фиг. 3. - расположение датчика УЗИ на манекене в процессе ультразвукового сканирования; фиг. 4. - трехосевой тензодатчик.
Заявленный способ осуществляют следующим образом.
Оператор (лаборант) включает аппарат УЗИ и RoboScan (далее - «робот»). Пациента укладывают на кушетку. Анатомическая область УЗИ определяется со слов пациента и/или при изучении направления от врача-клинициста. Оператор проводит предварительные настройки аппарата УЗИ для подготовки его к сканированию необходимой анатомической области, в программе для управления роботом выбирает предустановленную программу (сценарий), в зависимости от области сканирования. Вводит информацию об исследовании, включая информацию о пациенте.
Оператор наносит гель для УЗИ на исследуемую анатомическую область и/или на сканирующую поверхность УЗ-датчика. По готовности запускает программу (сценарий) сканирования выбранной анатомической области. Робот самостоятельно выходит в точку сканирования. Для коррекции расположения УЗ-датчика оператор может перевести робот с помощью программного обеспечения в ручной режим управления и самостоятельно подвести УЗ-датчик к нужной точке начала выполнения программы (сценария) сканирования. Оператор проводит настройку аппарата УЗИ (режим, яркость, контраст, фокус и др.), в зависимости от области сканирования. После установки УЗ-датчика и настройки аппарата УЗИ, оператор с помощью программного обеспечения запускает процесс выполнения УЗИ выбранной анатомической области.
Реализуется программа (сценарий) сканирования на роботе согласно внутреннему протоколу, перемещение УЗ-датчика осуществляется посредством шестиосного робота- манипулятора. По окончании выполнения программы (сценария) робот уходит в исходное (парковочное) положение. Оператор удаляет гель для УЗИ с УЗ-датчика и тела пациента, обрабатывает поверхность дезинфицирующим средством, предназначенным для обработки УЗ-датчиков. Пациент покидает кушетку и кабинет.
Данные ультразвукового сканирования (в том числе 3D-координаты и показатели с тензодатчика) сохраняются в формате DICOM в виде последовательных кадров, которые синхронизированы с временем их выполнения. Собранный пакет данных передается по интернет (и/или локальным) каналам на сервер.
Полученные в ходе ультразвукового сканирования данные, согласно правам доступа, оцениваются врачом, специализирующемся на УЗ-исследованиях, на его рабочем месте. Данные предоставляются врачу в виде последовательности DICOM-снимков (срезов), 3D-координат и показателей с тензодатчика, которые синхронизированы на шкале времени выполнения исследования. Врачу предоставляется набор инструментов для оценки и описания DICOM-данных, включая инструменты для проведения измерений, формирования отметок и пр. Врач проводит изучение данных ультразвукового сканирования анатомической области, проводит измерения, делает описание и формирует заключение, которое сохраняется на сервере с привязкой к исходным данным ультразвукового сканирования.
Доступ к данным (исходным данным ультразвукового сканирования в формате DICOM и ранее выполненного заключения) врач может получить в любой географической точке в любой момент времени. К этому же набору данных может получить доступ также врач-клиницист и принять клиническое решение не только на основе данных описания и заключения врача УЗ-диагностики, но и на основе исходных данных. Также данные могут накапливаться от исследования к исследованию и быть использованы для объективной оценки динамики состояния исследуемой анатомической области.
Таким образом, вся рутинная работа по сбору данных с использованием робота формализована, стандартизирована и может выполняться под управлением медицинского персонала среднего звена. Оператор контролирует работу робота, а также обеспечивает выполнение отдельного ряда операций, связанных с выбором УЗ-датчика в соответствии с проводимым типом исследования, изменением положения пациента, проведением очистки и дезинфекции датчиков, рабочего места и т.д.
Поскольку все рутинные операции по сбору данных выполняются оператором, врач может сосредоточиться на изучении данных ультразвукового сканирования, их описании и формировании заключения.
Кроме того, врачу доступна система искусственного интеллекта (ИИ), которая работает во время ультразвукового исследования и фиксирует отклонения от нормы. Система ИИ использует в работе нейросети, которые обучаются на базе большого количества УЗ-изображений, классифицированных по наличию или отсутствию различных проблем. Также система ИИ позволяет формировать второе мнение при составлении заключения.
Пример практической реализации заявленного способа.
Для моделирования способа автоматизированного ультразвукового сканирования изготовлен манекен малого таза с артифициальным мочевым пузырем и предстательной железой (фиг. 1): кости малого таза и часть бедренных костей напечатаны на 3D-принтере (PLA-пластик), мочевой пузырь сделан из тонкостенной резиновой емкости и наполнен водой, предстательная железа смоделирована из скульптурной глины, весь объем заполнен силиконовой массой (Super Form 10 - двухкомпонентный силиконовый компаунд).
Способ на смоделированном манекене осуществляли следующим образом.
Манекен малого таза разместили на тумбе, которая замещает собой кушетку, где располагается пациент для выполнения УЗИ мочевого пузыря.
Оператор (лаборант) включил аппарат УЗИ. Активизировалась программа для управления УЗИ и RoboScan (далее - «робот»). Оператор провел предварительные настройки аппарата УЗИ для подготовки его к сканированию мочевого пузыря, на программе для управления роботом выбрал предустановленную программу (сценарий) для ультразвукового сканирования мочевого пузыря. Оператор ввел информацию об исследовании, включая информацию об артифициальном пациенте.
Оператор нанес на манекен и на сканирующую поверхность УЗ-датчика гель для УЗИ. Также для исключения воздушной прослойки между УЗ-датчиком и сканирующей поверхностью была использована специальная одноразовая накладка на ультразвуковой датчик, которая помогает максимально увеличить контакт ультразвукового зонда с телом пациента и устраняет необходимость оказывать давление, уменьшая таким образом болевые ощущения пациента во время ультразвукового исследования (фиг. 2). По готовности оператор запустил программу (сценарий) сканирования мочевого пузыря.
Робот самостоятельно вышел в точку сканирования - область расположения артифициального мочевого пузыря на манекене (у человека эта область находится на 2 см ниже пупка по средней линии живота). Для сканирования был использован конвексный датчик УЗИ, который расположили в поперечном направлении срединной линии живота (фиг. 3). После установки УЗ-датчика, управляемого роботом, в нужную точку, оператор с помощью программного обеспечения запустил процесс выполнения УЗИ мочевого пузыря. Алгоритм сканирования представлял собой выполнение качательных движений
УЗ-датчика, который реализует робот. При этом сканирующая поверхность УЗ-датчика не смещалась относительно сканирующей поверхности. Таким образом, УЗ-датчик, перемещая в глубине манекена УЗ-волну, проводил сканирование в горизонтальной (аксиальной) плоскости манекена. За время сканирования (от 10 до 20 секунд) датчик не менее двух раз осуществлял полный цикл качательного движения, записывая в памяти компьютера собранную во время сканирования информацию. Степень давления на сканирующую поверхность регулировалась программным обеспечением, получая информацию с трехосевого тензодатчика, расположенного между УЗ-датчиком и поверхностью фиксации его к роботу (фиг. 4). С этого же датчика собиралась информация о степени давления на сканирующую поверхность.
По окончании выполнения программы (сценария) ультразвукового сканирования артифициального мочевого пузыря, робот возвратился в исходное (парковочное) положение. Оператор удалил гель для УЗИ с УЗ-датчика и манекена специальной салфеткой и обработал поверхность дезинфицирующим средством, предназначенным для обработки УЗ-датчиков.
Данные ультразвукового сканирования, показатели тензодатчика сохранились в формате DICOM в виде последовательности кадров, синхронизированных с временем их выполнения. Собранный пакет данных был передан по интернет-каналу на сервер.
Полученные в ходе ультразвукового сканирования данные, согласно правам доступа, оценивались врачом, специализирующемся на УЗ-исследованиях, на его рабочем месте. Для этого врачу были представлены данные в виде последовательности DICOM- снимков (срезов) и показателей с тензодатчика, которые синхронизированы на шкале времени выполнения исследования. Врачу был предоставлен стандартный набор инструментов для оценки и описания DICOM-данных, включая инструменты для проведения измерений, формирования отметок и пр. Врач изучил данные ультразвукового сканирования артифициального мочевого пузыря (размер мочевого пузыря, его конфигурацию, толщину стенки, эхоструктуру жидкости в просвете, наличие образований и др.), провел измерения, сделал описание и сформировал на основании этого описания заключение, которое сохранилось на сервере с привязкой с исходным данным ультразвукового сканирования.
Доступ к данным ультразвукового сканирования врач получил удаленно на своем рабочем месте в удобное ему время. Также доступ к данным (исходным данным ультразвукового сканирования в формате DICOM и ранее выполненного заключения) может получить врач-клиницист и принять клиническое решение не только на основе данных описания и заключения врача УЗ-диагностики, но и на основе исходных данных. Также данные могут накапливаться от исследования к исследованию и быть использованы для объективной оценки динамики состояния исследуемой анатомической области (в данном примере, артифициального мочевого пузыря).
Таким образом:
- процесс сбора данных ультразвукового сканирования и их анализ разделены временем и расстоянием;
- исходные данные ультразвукового исследования сохраняются в структурированном и хорошо протоколируемом виде - формате DICOM;
- сохраняются данные о силе давления УЗ-датчика на сканирующую поверхность;
- появляется возможность предоставить доступ к исходным данным в формате DICOM другим специалистам, например, врачам-клиницистам;
- появляется возможность объективно оценивать динамику сканируемой области;
- появляется возможность собирать формализованные исходные данные УЗИ в формате DICOM вместе с их формализованным описанием в электронном виде, что позволяет формировать размеченные датасеты в УЗИ для дальнейшего применения технологий глубокого машинного обучения и других решений на базе технологий искусственного интеллекта.
Такой подход дает возможность повысить доступность и качество УЗИ, а также создавать новые решения на базе современных технологий, включая технологии искусственного интеллекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОПЕРАЦИОННОЙ ПОДГОТОВКИ ПРИ МНОЖЕСТВЕННОЙ МИОМЕ МАТКИ | 2024 |
|
RU2837468C1 |
| Способ обучения родовспоможению при физиологических родах в среде виртуальной реальности | 2023 |
|
RU2835452C1 |
| СПОСОБ ПРОВЕДЕНИЯ МАЛОИНВАЗИВНОГО ХИРУРГИЧЕСКОГО ВМЕШАТЕЛЬСТВА И УСТАНОВКА "РХ-1" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594100C1 |
| Комбинированная интраоперационная навигационная система с использованием генерации ультразвуковых изображений методом трассировки лучей | 2022 |
|
RU2816071C1 |
| Способ робот-ассистированной биопсии предстательной железы с предварительным ультразвуковым сканированием | 2023 |
|
RU2827129C1 |
| СИМУЛЯЦИОННЫЙ КОМПЛЕКС ДЛЯ ОБСЛЕДОВАНИЯ БРЮШНОЙ ПОЛОСТИ C ПРИМЕНЕНИЕМ VR-СИМУЛЯЦИИ НА БАЗЕ КОМПЛЕКСНОЙ ТЕХНОЛОГИИ ТАКТИЛЬНОГО ТРЕКИНГА | 2022 |
|
RU2798405C1 |
| СПОСОБ ОТРАБОТКИ ПРАКТИЧЕСКИХ НАВЫКОВ ПО ОКАЗАНИЮ ПЕРВОЙ МЕДИЦИНСКОЙ ПОМОЩИ И ДИАГНОСТИКЕ РАЗЛИЧНЫХ ВИДОВ ПАТОЛОГИЙ СЕРДЦА С ПОМОЩЬЮ МЕДИЦИНСКОГО ТРЕНАЖЕРА | 2019 |
|
RU2693444C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ ЭФФЕКТИВНОСТИ ЛЕЧЕНИЯ ДОБРОКАЧЕСТВЕННОЙ ГИПЕРПЛАЗИИ ПРЕДСТАТЕЛЬНОЙ ЖЕЛЕЗЫ | 2018 |
|
RU2681508C1 |
| Способ введения анестетика в область подглазничного отверстия | 2024 |
|
RU2834645C1 |
| Способ исследования височно-нижнечелюстного сустава | 2022 |
|
RU2800238C1 |
Изобретение относится к медицине. Способ автоматизированного ультразвукового исследования с использованием роботизированного комплекса включает в себя автоматизированное ультразвуковое сканирование анатомической области исследования роботом-манипулятором, оснащенным тензодатчиком; измерение и регулирование давления ультразвукового датчика на сканируемую область в процессе ультразвукового сканирования; сохранение исходных данных ультразвукового сканирования в формате DICOM, 3D-координат и давления ультразвукового датчика на сканируемую область и передачу их на сервер; анализ данных ультразвукового сканирования врачом; сохранение результатов исследования с привязкой к исходным данным ультразвукового сканирования. Техническим результатом изобретения является автоматизированный процесс проведения ультразвукового исследования и обеспечение получения структурированных данных ультразвукового исследования для последующей удаленной обработки и анализа результатов исследования. 6 з.п. ф-лы, 4 ил., 1 пр.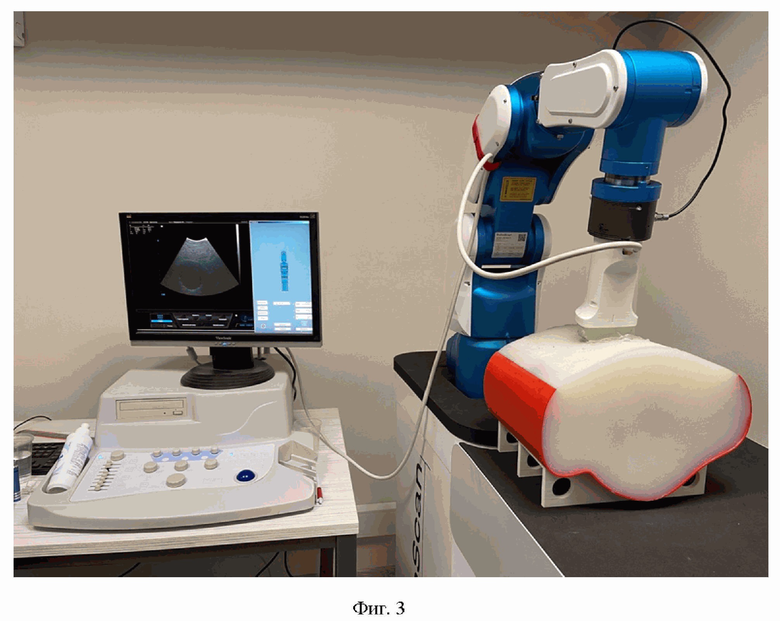
1. Способ автоматизированного ультразвукового исследования с использованием роботизированного комплекса, включающий автоматизированное ультразвуковое сканирование анатомической области исследования роботом-манипулятором, оснащенным тензодатчиком; измерение и регулирование давления ультразвукового датчика на сканируемую область в процессе ультразвукового сканирования; сохранение исходных данных ультразвукового сканирования в формате DICOM в виде синхронизированных по времени их выполнения последовательности кадров, 3D-координат и давления ультразвукового датчика на сканируемую область и передачу их на сервер; анализ данных ультразвукового сканирования врачом, включающий проведение измерений, составление описания и формирование заключения; сохранение результатов исследования с привязкой к исходным данным ультразвукового сканирования.
2. Способ по п. 1, отличающийся тем, что автоматизированное ультразвуковое сканирование реализуют в соответствии с внутренним протоколом, в зависимости от исследуемой анатомической области, и перемещение УЗ-датчика осуществляют посредством шестиосного робота-манипулятора.
3. Способ по п. 1, отличающийся тем, что исходные данные ультразвукового сканирования в формате DICOM передают по интернет и/или локальным каналам на сервер для осуществления последующего их анализа.
4. Способ по п. 1, отличающийся тем, что врач осуществляет анализ данных результатов ультразвукового сканирования, предоставленных в виде последовательности кадров, 3D-координат и показателей с тензодатчика, которые синхронизированы на шкале времени выполнения исследования.
5. Способ по п. 1, отличающийся тем, что анализ результатов ультразвукового сканирования врач осуществляет с использованием набора инструментов для оценки и описания DICOM-данных, включая инструменты для проведения измерений, формирования отметок, при этом врач проводит изучение данных ультразвукового сканирования анатомической области, проводит измерения, делает описание и формирует заключение, которое сохраняет на сервере с привязкой к исходным данным ультразвукового сканирования.
6. Способ по п. 3, отличающийся тем, что организован удаленный доступ врачей к исходным данным ультразвукового сканирования в формате DICOM.
7. Способ по п. 1, отличающийся тем, что исходные данные ультразвукового сканирования в формате DICOM и результаты исследования используют для объективной оценки динамики состояния исследуемой анатомической области.
| US 10912536 B2, 09.02.2021 | |||
| US 10734116 B2, 04.08.2020 | |||
| US 2011301461 A1, 08.12.2011 | |||
| CN 113053494 A, 29.06.2021 | |||
| Huang, Qinghua, and Jiulong Lan | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Li, Xiaolong, | |||
