Изобретение относится к системам автоматического регулирования вычислительных устройств и может быть использовано при разработке цифровых резервированных систем автоматического регулирования, например, при построении цифровой резервированной системы автоматического регулирования энергопреобразующей аппаратуры космических аппаратов (КА).
Известна четырёхканальная управляющая система (патент №2665252, МПК G06F 15/16, опубл. 28.08.2018), содержащая четыре управляющих канала, каждый из которых имеет входы информационных сигналов, три основных входа и три основных выхода для информационного обмена между смежными каналами, три резервных входа и три резервных выхода для резервирования отказов в работе основных входов-выходов информационного обмена между управляющими каналами, входы для приема сигналов ошибки смежных каналов, выходы для передачи сигналов ошибки, выявленных в результате мажоритирования управляющего сигнала, основной и резервный вход-выход для передачи телеметрии внешней аппаратуры, каждый канал включает в себя вычислительное устройство, первый выход которого подключен к основным и резервным передатчикам последовательного интерфейса, второй выход к первому входу мажоритарного элемента, являющийся резервным для формирования управляющего сигнала в собственном канале, третий вход-выход к первому входу-выходу блока контроля телеметрии, четвертый вход к четвертому выходу блока контроля ошибок, пятый - n входы информационных сигналов, подключенных к внешним выходам, последовательный интерфейс, в составе которого три основных передатчика, подключенных к внешним выходам, три резервных передатчика, подключенных к внешним выходам, три основных приемника, подключенных к внешним выходам и входам мажоритарного элемента, и три резервных приемника, подключенных к внешним выходам и входам мажоритарного элемента, блок контроля телеметрии, который имеет вход-выход, который подключен к вычислительному устройству, основной и резервный информационный канал, подключенные к внешнем выходам, мажоритарный элемент, первый вход которого подключен к вычислительному устройству, второй, третий и четвертый входы подключены к приемникам последовательного интерфейса, пятый выход подключен к восьмому входу блока контроля ошибок, шестой выход подключен к внешнему выходу управляющего сигнала, блок контроля ошибок, первый, второй, третий выходы которого подключены к внешним выходам, четвертый выход подключен к четвертому входу вычислительного устройства, пятый, шестой и седьмой входы к внешним выходам. Отказоустойчивость достигается за счет способности системы функционировать при отказе двух каналов с сохранением работоспособности системы, а так же наличием резервных магистралей обмена управляющего сигнала. Контролепригодность и автономность системы, при отказе одного из каналов, достигается за счет способности мажоритарного восстановления информации по схеме голосования «2 из 3» между вычислительными блоками и блоками ввода-вывода каналов системы без привлечения внешней аппаратуры.
Указанное устройство является наиболее близким по технической сущности и принято за прототип.
Недостатками такого технического решения являются сложный алгоритм контроля ошибок расчета управляющего сигнала, подразумевающий большое количество связей между каналами и, как следствие, низкую скорость вычисления управляющего сигнала и существенное усложнение системы регулирования при увеличении количества каналов объекта контроля, а также контролепригодность и автономность системы, при отказе только одного из каналов системы.
Для заявленного изобретения выявлены следующие общие с прототипом существенные признаки: цифровая резервированная система автоматического регулирования содержит: цифровое устройство управления, включающее в себя четыре канала, каждый из которых содержит, вычислительное устройство, передатчик последовательного интерфейса и объект контроля (ОК), состоящий из N независимых каналов.
Технической проблемой изобретения является упрощение алгоритма контроля ошибок расчета управляющего сигнала, уменьшение количества связей между каналами, упрощение системы регулирования при увеличении количества каналов объекта контроля и повышение контролепригодности и автономности системы.
Технический результат заключается в повышении надёжности и масштабируемости системы автоматического регулирования за счёт введения в централизованном управляющем устройстве четырёх идентичных каналов, работающих по схеме резервирования «2 из 3 плюс 1» и введения системы выбора достоверного значения управляющего воздействия в вычислительных устройствах каналов ОК.
Техническая проблема решается, а технический результат достигается тем, что в цифровой резервированной системе автоматического регулирования выход аналоговой части ОК, состоящего из N каналов, в каждом из четырех каналов цифрового устройства управления (ЦУУ) связан с входом масштабирующего усилителя, выход масштабирующего усилителя соединён со входом аналого-цифрового преобразователя (АЦП), a выход АЦП соединён с четырьмя входами вычислительного устройства ЦУУ, регулятор вычислительного устройства ЦУУ на основе оцифрованного сигнала обратной связи и заданного опорного значения рассчитывает управляющее воздействие для каналов ОК, два выхода вычислительного устройства ЦУУ соединены с двумя входами передатчика последовательного интерфейса LVDS, выходы передатчика последовательного интерфейса каждого из четырех каналов ЦУУ связаны с входами приёмника последовательного интерфейса каждого из N каналов ОК, выходы приёмника последовательного интерфейса соединены со входами вычислительного устройства ОК, вычислительное устройство ОК для значений, полученных от приёмника последовательного интерфейса рассчитывает CRC код на основе которого производит выбор 3-х значений, используемых для выбора одного достоверного значения с помощью медианного элемента. На основе выбранного достоверного значения управляющего воздействия и сигнала обратной связи, поступающего с выхода АЦП аналоговой части канала ОК цифровые регуляторы вычислительных устройств ОК рассчитывают сигналы управления аналоговой частью каждого из N каналов ОК.
Отказоустойчивость достигается за счет способности системы функционировать при отказе или сбое передачи данных двух каналов ЦУУ, с сохранением работоспособности системы.
Повышение контролепригодности и автономности системы, при отказе или сбое передачи данных двух каналов ЦУУ, достигается за счет алгоритма отбраковки одного неправильного значения и медианной фильтрации трёх значений управляющего воздействия в вычислительном устройстве каждого канала ОК.
Под объектом контроля подразумеваются элементы системы, которыми управляет ЦУУ.
Изобретение поясняется схемами:
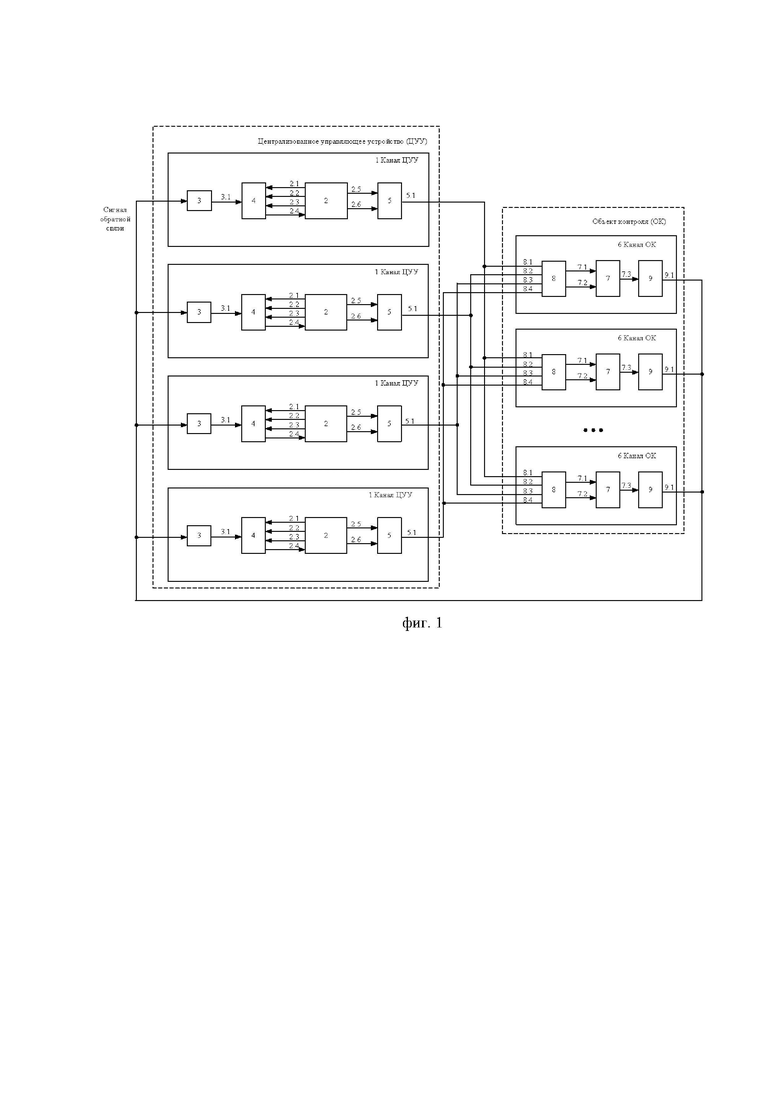
– фиг. 1 - структурная схема цифровой резервированной системы автоматического регулирования;
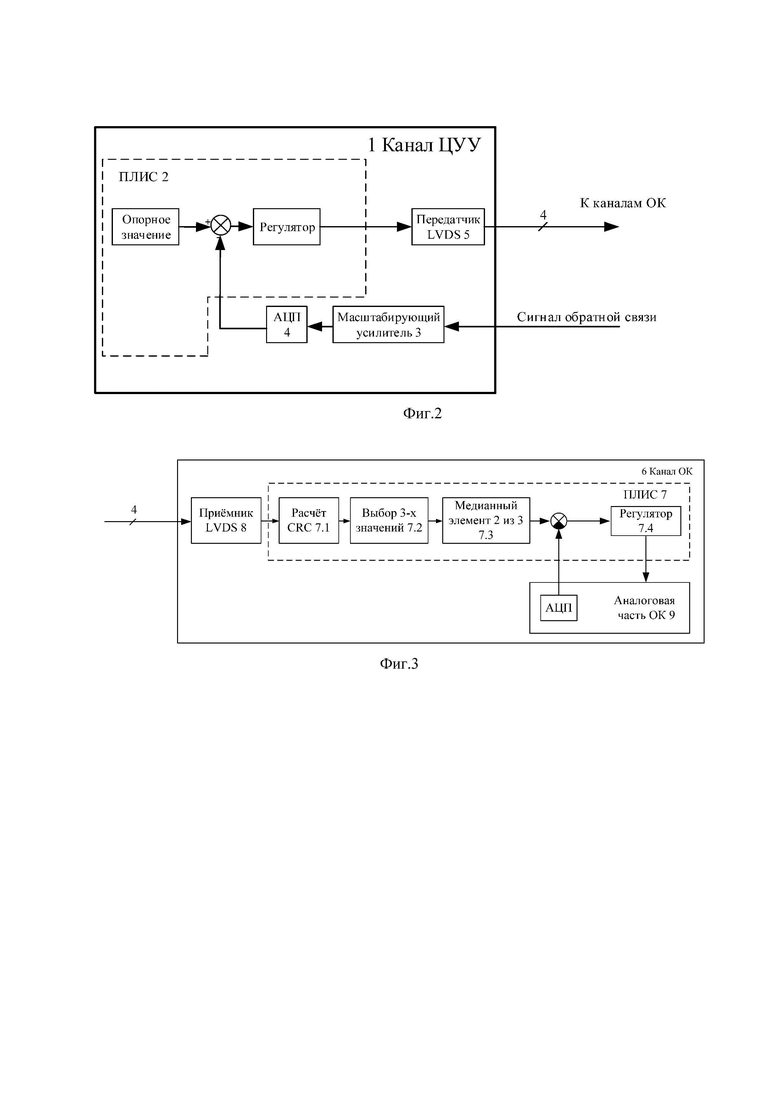
– фиг. 2 - структурная схема канала ЦУУ;
– фиг. 3 - структурная схема канала ОК.
Цифровая резервированная система автоматического регулирования (фиг. 1) содержит:
– четыре канала ЦУУ (1), каждый из которых содержит вход сигнала обратной связи, поступающий на масштабирующий усилитель (3), выход масштабирующего усилителя (3.1) поступает на АЦП (4), после чего оцифрованное значение обратной связи (2.1, 2.2, 2.3, 2.4) поступает на вычислительное устройство на базе программируемой логической интегральной схемы (ПЛИС) (2), в котором рассчитывается цифровой код управляющего воздействия (2.5, 2.6), поступающего на вход передатчика LVDS (5), обеспечивающий передачу управляющего воздействия (5.1) во все каналы ОК.
– N каналов ОК (6), каждый из которых содержит приемник последовательного интерфейса LVDS, который принимает управляющие сигналы (8.1, 8.2, 8.3, 8.4) от четырех каналов ЦУУ. Приемник последовательного интерфейса LVDS (8) передает сигналы управления на входы (7.1, 7.2) вычислительного устройства ОК на базе ПЛИС (7). Выходы вычислительных устройств каналов ОК выдают сигналы управления (7.3) на аналоговые части каналов ОК (9).
Канал системы ЦУУ (фиг. 2) представляет собой вычислительное устройство на базе ПЛИС (2), входной сигнал обратной связи подключен к масштабирующему усилителю (3), выход масштабирующего усилителя подключен к входу АЦП (4), оцифрованное значение сигнала обратной связи поступает в ПЛИС (2), на основе которого рассчитывается управляющее воздействие для каналов ОК, поступающие с выхода ПЛИС (2) на выход передатчика последовательного интерфейса LVDS (5).
Канал ОК (6) (фиг. 3) включает в себя вычислительное устройство на базе ПЛИС (7), четыре входа управляющего воздействия подключены к приёмнику последовательного интерфейса LVDS (8). В ПЛИС для значений полученных от приёмника LVDS рассчитывается CRC код (7.1), после чего происходит выбор 3-х значений (7.2), используемых в медианном элементе (7.3). На основе выбранного в медианном элементе достоверного значения управляющего воздействия и сигнала обратной связи, поступающего с выхода АЦП аналоговой части канала ОК (9) в регуляторе (7.4) рассчитывается сигнал обеспечивающий управление аналоговой частью канала ОК (9).
Входящие в резервированную систему автоматического регулирования блоки выполняют следующие основные функции, описанные ниже.
Вычислительное устройство (2) по входному сигналу от АЦП, формирует управляющее воздействие, обеспечивая логику функционирования ОК. Передатчики последовательного интерфейса LVDS (5) и приёмники последовательного интерфейса LVDS (8) предназначены для организации обмена сигналов управления между каналами резервированного цифрового устройства управления и каналами ОК (фиг. 1). Масштабирующий усилитель (3), служит для согласования входного напряжения со входом АЦП (4). АЦП (4) преобразует аналоговый сигнал, поступающий от масштабирующего усилителя в цифровой код.
Вычислительное устройство (7) осуществляет выбор достоверного значения управляющего воздействия, из четырех значений (8.1, 8.2, 8.3, 8.4), поступающих от четырех каналов ЦУУ, и осуществляет расчёт сигнала управления (7.3) аналоговой частью соответсвующего канала ОК (9).
Заявленная резервированная система автоматического регулирования функционирует следующим образом:
Для обеспечения резервирования системы автоматического регулирования, цифровое управляющее устройство строится из четырёх параллельно работающих каналов, что совместно с системой выбора управляющего воздействия в каждом канале ОК позволяет обеспечить резервирование по схеме «2 из 3 плюс 1». Это означает, что ОК будет работать с достоверным сигналом управления, даже если на каком-то из этапов функционирования, от непосредственной обработки сигнала обратной связи до передачи его в каналы ОК произойдет отказ или сбой работы в двух каналах ЦУУ или двух каналах передачи данных. Все каналы ЦУУ и ОК запитаны от независимых источников питания, что исключает взаимное влияние каналов ЦУУ и ОК друг на друга.
На вход всех каналов ЦУУ поступает аналоговый сигнал обратной связи (9.1), который масштабируется и оцифровывается. Оцифрованное значение сигнала обратной связи используется для формирования управляющего воздействия для каналов ОК.
Передача управляющего воздействия от каналов ЦУУ, образующих внешний контур системы автоматического регулирования, осуществляется с помощью последовательного интерфейса с физическим уровнем LVDS одновременно во все каналы ОК. Управляющее воздействие передаётся в виде 16-ти разрядного слова данных и кода коррекции CRC8. В каждом канале ОК сначала производится расчёт CRC кода для выявления ошибок в передаче данных и проверки работоспособности каналов ЦУУ. В случае несовпадения CRC кода в каком-то из принимаемых значений, для дальнейшего функционирования принимаемое значение не учитывается. После расчёта CRC кода, происходит выборка трёх значений из четырёх принятых значений управляющего воздействия, полученные значения передаются на медианный элемент, который выстраивает по возрастанию эти три значения и находит среди них управляющее воздействие, являющееся средним из трёх. Выбранное значение используется для расчета сигнала управления аналоговой частью канала ОК (9). В случае, если одно из значений, поступивших на медианный элемент окажется сбойным оно не повлияет на выходное значение медианного элемента.
Таким образом, данная цифровая резервирования система автоматического регулирования обеспечивает отказоустойчивость, контролепригодность и автономность в случае возникновения двух отказов или сбоев работы каналов ЦУУ или при передаче управляющего воздействия.
Заявленная резервированная система управления может быть реализована на следующих элементах: Вычислительное устройство управляющих каналов может быть реализовано на микроконтроллерах типа STM32 фирмы «STMicroelectronics», 1986ВЕ1(8) или ПЛИС типа Cyclone III – V фирмы «Altera», 5578ТС084 (5578ТС094) предприятия «ВЗПП-С». Передатчик последовательного интерфейса может быть реализован на микросхемах SN65LVDS050PW фирмы «Texas Instruments», ADN4665 фирмы «Analog Devices», 5560ИН1Т предприятия «Интеграл». Приёмник последовательного интерфейса может быть реализован на микросхемах SN65LVDS048APW фирмы «Texas Instruments», ADN4666 фирмы «Analog Devices», 5560ИН2Т предприятия «Интеграл». АЦП может быть реализован на микросхемах AD7490 фирмы «Analog Devices», LTC1598 фирмы «Linear Technology».
Вычислительное устройство приёмника может быть реализовано на ПЛИС типа Cyclone III – V фирмы «Altera» или 5578ТС084 (5578ТС094) предприятия «ВЗПП-С».
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2399088C2 |
| ПРОЦЕССОР ЦИФРОВОГО РАЗДЕЛЕНИЯ КВАДРАТУР | 2022 |
|
RU2784002C1 |
| УПРАВЛЯЮЩАЯ ЭВМ | 2005 |
|
RU2316807C2 |
| МОДУЛЬ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАТЕЛЯ | 2005 |
|
RU2290662C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ И УПРАВЛЕНИЯ ПРИЦЕЛЬНЫМИ ШКАЛАМИ | 2017 |
|
RU2700034C2 |
| УСТРОЙСТВО ИМИТАЦИИ КАНАЛА СПУТНИКОВОЙ СВЯЗИ С ВЫПУСКНЫМ БУКСИРУЕМЫМ АНТЕННЫМ УСТРОЙСТВОМ В ДМВ ДИАПАЗОНЕ | 2020 |
|
RU2767180C1 |
| РАДИОЛОКАЦИОННЫЙ ПРИЕМНИК С УСТРОЙСТВОМ УПРАВЛЕНИЯ | 2013 |
|
RU2535931C1 |
| БЛОК ПРИЕМА И СИНХРОНИЗАЦИИ | 2012 |
|
RU2497148C1 |
| УДАЛЕННАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ДАННЫХ ДЛЯ БОРТОВОЙ РЕГИСТРИРУЮЩЕЙ АППАРАТУРЫ | 2012 |
|
RU2493592C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2011 |
|
RU2495449C2 |
Изобретение относится к резервированным системам автоматического регулирования. Технический результат заключается в повышении надёжности вычисления управляющего сигнала с возможностью масштабирования количества каналов объекта контроля. Технический результат достигается за счёт введения в централизованном управляющем устройстве (ЦУУ) четырёх идентичных каналов, включенных по схеме, обеспечивающей резервирование «2 из 3 плюс 1», и введения системы выбора достоверного управляющего воздействия в вычислительных устройствах объекта контроля, при этом каждый канал ЦУУ содержит вычислительное устройство, масштабирующий усилитель, аналого-цифровой преобразователь и передатчик последовательного интерфейса по шине LVDS, передатчики последовательного интерфейса ЦУУ соединяются с приемниками каждого из N каналов объекта контроля системы автоматического регулирования. 3 ил.
Цифровая резервированная система автоматического регулирования, содержащая цифровое устройство управления (ЦУУ), включающее в себя четыре канала, каждый из которых содержит масштабирующий усилитель, вычислительное устройство ЦУУ и передатчик последовательного интерфейса, отличающаяся тем, что масштабирующий усилитель каждого из четырех каналов цифрового управляющего устройства связан с сигналом обратной связи объекта контроля (ОК), состоящего из N каналов, выход масштабирующего усилителя соединён с входом аналого-цифрового преобразователя (АЦП), a выход АЦП соединён с входами вычислительного устройства ЦУУ, регулятор вычислительного устройства ЦУУ на основе оцифрованного сигнала обратной связи и заданного опорного значения рассчитывает управляющее воздействие для каналов ОК, выходы вычислительного устройства ЦУУ соединены с входами передатчика последовательного интерфейса LVDS, выходы передатчика последовательного интерфейса каждого из четырех каналов ЦУУ связаны с входами приёмника последовательного интерфейса каждого из N каналов ОК, выходы приёмника последовательного интерфейса соединены с входами вычислительного устройства ОК, вычислительное устройство ОК для значений, полученных от приёмника последовательного интерфейса, рассчитывает CRC код, на основе которого производит выбор 3-х значений, используемых для выбора одного достоверного значения с помощью медианного элемента, на основе выбранного достоверного значения управляющего воздействия и сигнала обратной связи, поступающего с выхода АЦП аналоговой части канала ОК, цифровые регуляторы вычислительных устройств ОК рассчитывают сигналы управления аналоговой частью каждого из N каналов ОК.
| Многоканальный аппаратно-программный комплекс высокоскоростной цифровой обработки сигналов | 2018 |
|
RU2714493C2 |
| УДАЛЕННАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ДАННЫХ ДЛЯ БОРТОВОЙ РЕГИСТРИРУЮЩЕЙ АППАРАТУРЫ | 2012 |
|
RU2493592C1 |
| РЕЗЕРВИРОВАННАЯ ЧЕТЫРЁХКАНАЛЬНАЯ ЦИФРОВАЯ УПРАВЛЯЮЩАЯ СИСТЕМА | 2017 |
|
RU2665252C1 |
| US 8041873 B2, 18.10.2011 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
