Изобретение относится к вычислительной технике и может быть использовано при построении управляющих вычислительных устройств высокой отказоустойчивости, контролепригодности и автономности, к примеру, цифрового управляющего модуля комплекса энергопреобразующего системы электропитания космическим аппаратом.
Известна трехканальная резервированная микропроцессорная система (патент №1494761, МПК G06F 11/16, опубл. 1994.03.30), состоящая из трех однотипных резервных каналов, работающих строго синхронно, каждый из которых содержит микропроцессор, блок памяти, блок ввода-вывода, регистр адреса, блок управления, блок исправления информации в двунаправленной магистрали, первый и второй блоки исправления информации. Синхронизация работы каналов обеспечивается с помощью внешних тактовых сигналов синхронных и синфазных между собой. В системе организовано мажоритарное восстановление информации между микропроцессорами, блоками ввода-вывода и блоками памяти каналов системы.
Недостатками такого технического решения являются необходимость формирования в каналы системы внешних тактовых сигналов высокой частоты, синхронизированных между собой, отсутствие мажоритарного восстановления информации в случае выхода из строя одного из каналов, а так же низкая контролепригодность системы, так как каналы системы не способны информировать смежные каналы и внешнюю аппаратуру о своей исправности.
Известна трехканальная управляющая система (патент №2054710, МПК G06F 15/16, опубл. 1996.02.20), содержащая три управляющих канала, каждый из которых содержит вычислительный блок и блок ввода-вывода. Система обеспечивает синхронное формирование выходных сигналов. Синхронное формирование выходных сигналов каналами обеспечивается с помощью межпроцессорного обмена. В системе организовано мажоритарное восстановление информации между вычислительными блоками и блоками ввода-вывода каналов системы.
Недостатками такого технического решения являются необходимость синхронизации управляющих каналов между собой для формирования выходного сигнала и мажоритарного восстановления информации, отсутствие мажоритарного восстановления информации в случае выхода из строя одного из каналов, а так же низкая контролепригодность системы, так как каналы системы не способны информировать смежные каналы и внешнюю аппаратуру о своей исправности.
Известна трехканальная управляющая система (патент №2333529, МПК G06F 15/16, опубл. 2008.09.10), содержащая три управляющих канала, каждый из которых содержит вычислительный блок и блок ввода-вывода. Вычислительный блок содержит ЭВМ, основной и резервный приемопередатчики последовательного интерфейса, основную и резервную магистрали межпроцессорного обмена. Система обеспечивает синхронное формирование выходных сигналов с помощью межпроцессорного обмена. В системе организовано мажоритарное восстановление информации между вычислительными блоками и блоками ввода-вывода каналов системы. Каналы системы способны информировать смежные каналы и внешнюю аппаратуру о своей исправности.
Указанное устройство является наиболее близким по технической сущности и принято за прототип.
Недостатками такого технического решения являются необходимость синхронизации управляющих каналов между собой для формирования выходного сигнала и мажоритарного восстановления информации, а так же низкая контролепригодность и автономность системы из-за невозможности мажоритарного восстановления информации между вычислительными блоками и блоками ввода-вывода каналов системы без привлечения внешней аппаратуры, при отказе одного из каналов системы.
Техническим результатом изобретения является повышение отказоустойчивости, контролепригодности и автономности системы.
Для достижения указанного технического результата разработана четырехканальная управляющая система, состоящая из четырех идентичных управляющих каналов, каждый из которых содержит вычислительное устройство (ВУ), мажоритарный элемент (МЭ), блок контроля ошибки (БКО), блок контроля телеметрии (БКТ), основные и резервные приемопередатчики для обмена телеметрией, приемники и передатчики для обмена данными между вычислительными устройствами.
Повышение отказоустойчивости достигается за счет способности системы функционировать при отказе двух каналов, с сохранением работоспособности системы, а так же наличием резервных магистралей обмена управляющего сигнала.
Повышение контролепригодности и автономности системы, при отказе каналов, достигается за счет способности мажоритарного восстановления информации по схеме голосования «2 из 3» между вычислительными блоками и блоками ввода-вывода каналов системы без привлечения внешней аппаратуры.
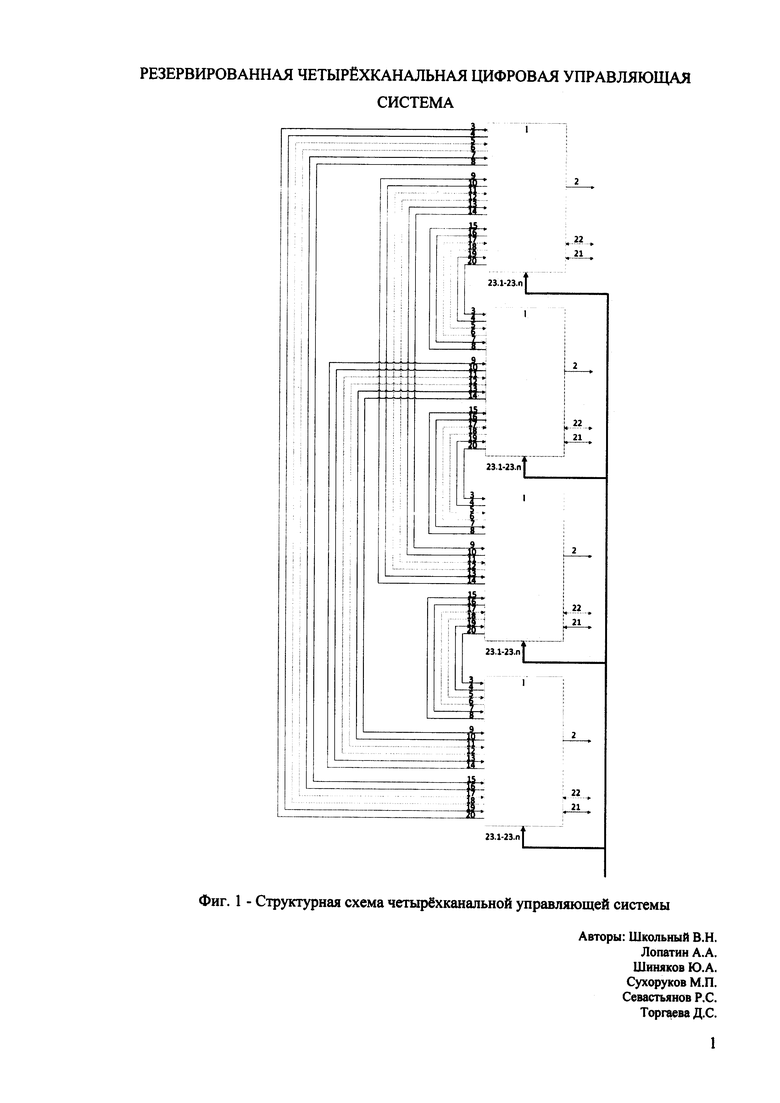
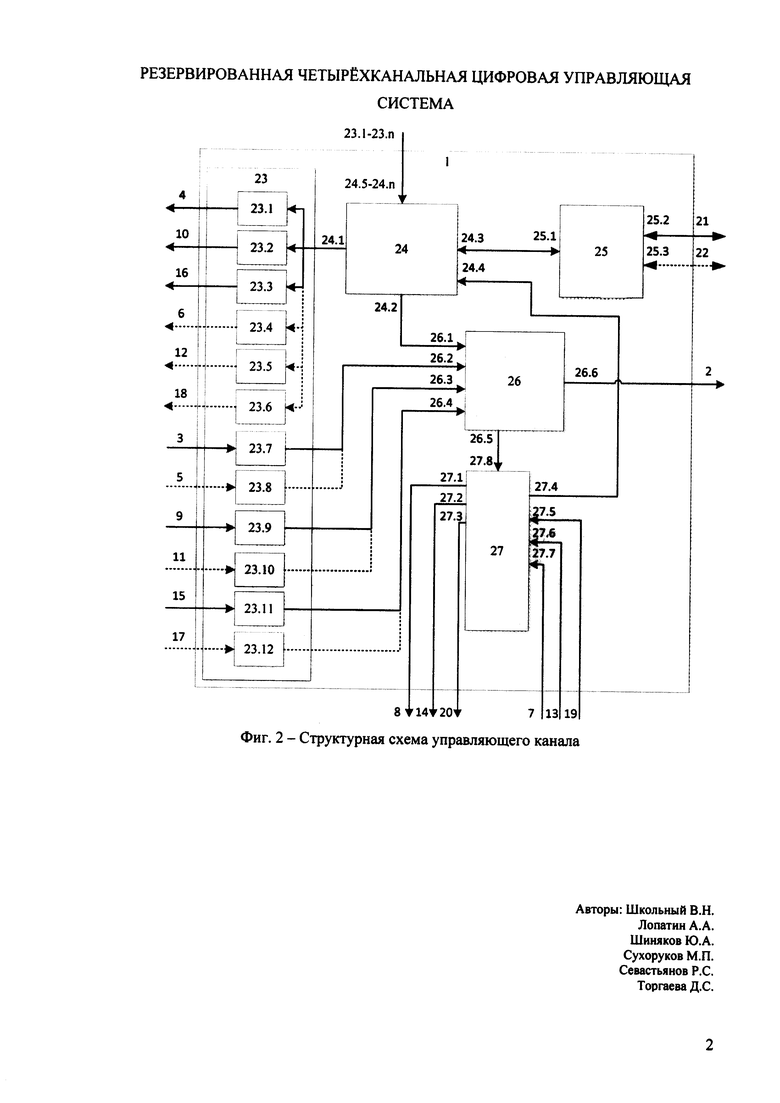
На фиг. 1 представлена структурная схема четырехканальной управляющей системы; на фиг. 2 - структурная схема управляющего канала.
Четырехканальная управляющая система (фиг. 1) содержит четыре управляющих канала 1, каждый из которых содержит входы информационных сигналов, по которым рассчитывается сигнал управления (23.1-23.n) и выход управляющего сигнала (2), первый канал имеет три основных входа (3, 9, 15) и три основных выхода (4, 10, 16) для информационного обмена между четвертым, третьим и вторым каналам соответственно, три резервных входа (5, 11, 17) и три резервных выхода (6, 12, 18) для резервирования отказов в работе основных входов-выходов информационного обмена между управляющими каналами, входы (7, 13, 19) подключенные к четвертому, третьему и второму каналам соответственно служат для приема сигнала ошибки, выходы (8, 14, 20) подключенные к четвертому, третьему и второму каналам соответственно необходимы для передачи сигнала ошибки, в результате мажоритирования управляющего сигнала, блоку контроля ошибок канала в котором произошла ошибка, основной вход-выход (21) служит для передачи информации телеметрии с внешней аппаратурой, резервный вход-выход (22) для резервирования отказа основного входа-выхода (21), второй канал имеет три основных входа (7, 9, 19) и три основных выхода (8, 10, 20) для информационного обмена между первым, четвертым и третьим каналами соответственно, три резервных входа (5, 11, 17) и три резервных выхода (6, 12, 18) для резервирования отказов в работе основных входов-выходов информационного обмена между управляющими каналами, входы (3, 13, 15) подключенные к первому, четвертому и третьему каналам соответственно служат для приема сигнала ошибки, выходы (4, 14, 16) подключенные к первому, четвертому и третьему каналам соответственно необходимы для передачи сигнала ошибки, в результате мажоритирования управляющего сигнала, блоку контроля ошибок канала в котором произошла ошибка, основной вход-выход (21) служит для передачи информации телеметрии с внешней аппаратурой, резервный вход-выход (22) для резервирования отказа основного входа-выхода (21), третий канал имеет три основных входа (3, 13, 15) и три основных выхода (4, 14, 16) для информационного обмена между вторым, первым и четвертым каналами соответственно, три резервных входа (5, 11, 17) и три резервных выхода (6, 12, 18) для резервирования отказов в работе основных входов-выходов информационного обмена между управляющими каналами, входы (7, 9, 19) подключенные к второму, первому и четвертому каналам соответственно служат для приема сигнала ошибки, выходы (8, 10, 20) подключенные к второму, первому и четвертому каналам соответственно необходимы для передачи сигнала ошибки, в результате мажоритирования управляющего сигнала, блоку контроля ошибок канала в котором произошла ошибка, основной вход-выход (21) служит для передачи информации телеметрии с внешней аппаратурой, резервный вход-выход (22) для резервирования отказа основного входа-выхода (21), четвертый канал имеет три основных входа (7, 13, 19) и три основных выхода (8, 14, 20) для информационного обмена между третьим, вторым и первым каналами соответственно, три резервных входа (5, 11, 17) и три резервных выхода (6, 12, 18) для резервирования отказов в работе основных входов-выходов информационного обмена между управляющими каналами, входы (3, 9, 15) подключенные к третьему, второму и первому каналам соответственно служат для приема сигнала ошибки, выходы (4, 10, 16) подключенные к третьему, второму и первому каналам соответственно необходимы для передачи сигнала ошибки, в результате мажоритирования управляющего сигнала, блоку контроля ошибок канала в котором произошла ошибка, основной вход-выход (21) служит для передачи информации телеметрии с внешней аппаратурой, резервный вход-выход (22) для резервирования отказа основного входа-выхода канала телеметрии (21).
Управляющий канал (фиг. 2) представляет собой микропроцессорное устройство (1). которое включает в себя вычислительное устройство (24), выход (24.1) которого подключен к основным и резервным передатчикам (23.1-23.6) последовательного интерфейса (23), выход (24.2) к первому входу (26.1) мажоритарного элемента (26), вход-выход (24.3) к входу-выходу (25.1) блока контроля телеметрии, вход (24.4) к выходу (27.4) блока контроля ошибок, входы (24.5-24.п) к внешним входам (23.1-23.n), последовательный интерфейс (23), в составе которого три основным передатчика (23.1-23.3) подключенных к внешним выходам (4, 10, 16) соответственно, три резервных передатчика (23.4-23.6) подключенных к внешним выходам (6, 12, 18) соответственно, три основных приемника (23.7, 23.9, 23.11) подключенных к внешним выходам (3, 9, 15) и входам мажоритарного элемента (26.2-26.4) соответственно и три резервных приемника (23.8, 23.10, 23.12) подключенным к внешним выходам (5, 11, 17) и входам мажоритарного элемента (26.2-26.4) соответственно, блок контроля телеметрии (25) с помощью входа-выхода (25.1) подключен к вычислительному устройству (24), основной и резервный информационный канал (25.2, 25.3) подключенные к внешнем выходам (21, 22) соответственно, мажоритарный элемент (26), с помощью входа (26.1) подключен к вычислительному устройству (24). входы (26.2-26.4) подключены к приемникам последовательного интерфейса, выход (26.5) подключен к входу (27.8) блока контроля ошибок (27), выход (26.6) подключен к внешнему выходу управляющего сигнала (2), блок контроля ошибок (27), выходы (27.1-27.3) которого подключены к внешним выходам сигнала ошибки (8, 14, 20) соответственно, выход (27.4) подключен к вычислительному устройству (24), входы (27.5-27.7) к внешним входам сигнала ошибки (7, 13, 19) соответственно.
Входящие в четырехканальную управляющую систему блоки выполняют следующие основные функции, описанные ниже.
Вычислительное устройство (24) по входным параметрам от внешних устройств, формирует сигнал управления, например обеспечения логики функционирования прибора при изменении соотношения мощностей нагрузки и первичных источников электрической энергии, а также осуществляет выдачу телеметрической информации в бортовой комплекс управления и прием команд управления от бортового комплекса управления. Последовательный интерфейс (23) предназначен для организации обмена сигналов управления между управляющими каналами четырехканальной управляющей системы (фиг. 1). Блок контроля телеметрии (25) необходим для приема технологических команд с внешней аппаратуры и передачи информации о текущем состоянии управляющего канала. Мажоритарный элемент (26) предназначен для того, чтобы определять ошибки в смежных управляющих каналах и маскировать такие ошибки формируя достоверный сигнал управления. Блок контроля ошибок (27) выполняет оповещение смежных каналов об определении мажоритарным элементом ошибки, а так же включение и отключение вычислительного устройства (24).
Заявленная четырехканальная управляющая система функционирует следующим образом.
Основным режимом работы четырехканальной управляющей системы является конфигурация «2 из 3,+1» означающая, что в каждом канале управления выходной сигнал формируется на основании трех смежных каналов, а собственное вычислительное устройство является резервным.
После включения питания системы каждый канал в течение цикла управления выполняет следующие операции:
- вычислительное устройство по определенному набору входных параметров формирует управляющий сигнал;
- вычислительное устройство каждого канала передает сформированный управляющий сигнал в смежные каналы;
- мажоритарное восстановление информации от смежных каналов;
В случае обнаружение мажоритарным элементом ошибки в одном из каналов выполняется следующее:
- формирование сигнала ошибки мажоритарным элементом в одном из каналов;
- прием блоком контроля ошибок сигнала ошибки от мажоритарного элемента, передача сигнала ошибки в соответствующий канал и прием сигнала ошибки от смежных каналов;
Каждый канал передает смежным каналам свой информационный сигнал и принимает информационные сигналы от смежных каналов по основным или резервным магистралям. Магистрали реализованы по принципу «точка-точка» (на одной магистрали один приемник и передатчик), что повышает отказоустойчивость системы.
При отказе одного из каналов, мажоритарный элемент определяет в каком канале шибка и передает номер канала в блок контроля ошибок, который передает номер отказавшего канала в блоки контроля ошибок смежных каналов. В случае приема блоком контроля ошибки двух и более сигналов от смежных каналов с одинаковым номером отказавшего канала, блок контроля ошибок формирует вычислительному устройству сигнал замены отказавшего канала, вычислительное устройство переводится в активный режим на собственном канале. Блок контроля ошибок отказавшего канала формирует сигнал отключения для собственного вычислительного устройства. Система продолжает функционировать в трехканальном режиме по конфигурации «2 из 3». При этом в случае функционирования в канале, где произошел отказ, мажоритарного элемента и последовательного интерфейса, канал остается рабочим, так как сигналы управления приходят со смежных каналов, что положительно сказывается на автономности и отказоустойчивости системы.
Второй отказ не влияет на работу системы, так как сигналы управления приходят со смежных каналов. При втором отказе одного из каналов, мажоритарный элемент определяет в каком канале ошибка и по схеме голосования «2 из 3» формирует достоверный сигнал.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 2022 |
|
RU2798049C1 |
| СПОСОБ ФОРМИРОВАНИЯ 4-КАНАЛЬНОЙ ОТКАЗОУСТОЙЧИВОЙ СИСТЕМЫ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ ПОВЫШЕННОЙ ЖИВУЧЕСТИ И ЭФФЕКТИВНОГО ЭНЕРГОПОТРЕБЛЕНИЯ И ЕГО РЕАЛИЗАЦИЯ ДЛЯ КОСМИЧЕСКИХ ПРИМЕНЕНИЙ | 2011 |
|
RU2449352C1 |
| Резервированная система | 1982 |
|
SU1084802A1 |
| ТРЕХКАНАЛЬНАЯ УПРАВЛЯЮЩАЯ СИСТЕМА | 2007 |
|
RU2333529C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОТКАЗОУСТОЙЧИВОЙ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ И ОТКАЗОУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2439674C1 |
| ОТКАЗОУСТОЙЧИВАЯ СИСТЕМА УПРАВЛЕНИЯ | 2021 |
|
RU2763092C1 |
| ПАССАЖИРСКИЙ САМОЛЕТ С СИСТЕМОЙ УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ И САМОЛЕТНЫМИ СИСТЕМАМИ | 2013 |
|
RU2529248C1 |
| МОДУЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2011 |
|
RU2474868C1 |
| Трехканальная резервированная микропроцессорная система | 1985 |
|
SU1378287A1 |
| АДАПТИВНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2011 |
|
RU2477882C2 |
Изобретение относится к вычислительной технике. Техническим результатом является повышение отказоустойчивости, контролепригодности и автономности системы. Система содержит четыре идентичных управляющих каналов, каждый из которых содержит вычислительное устройство (ВУ), мажоритарный элемент (МЭ), блок контроля ошибки (БКО), блок контроля телеметрии (БКТ), основные и резервные приемопередатчики для обмена телеметрией, основные и резервные приемники и передатчики для обмена данными между вычислительными устройствами. Повышение отказоустойчивости достигается за счет способности системы функционировать при отказе двух каналов с сохранением работоспособности системы, а так же наличием резервных магистралей обмена управляющего сигнала. Повышение контролепригодности и автономности системы, при отказе одного из каналов, достигается за счет способности мажоритарного восстановления информации по схеме голосования «2 из 3» между вычислительными блоками и блоками ввода-вывода каналов системы без привлечения внешней аппаратуры. 2 ил.
Четырехканальная управляющая система, содержащая четыре управляющих канала, каждый из которых имеет входы информационных сигналов, три основных входа и три основных выхода для информационного обмена между смежными каналами, три резервных входа и три резервных выхода для резервирования отказов в работе основных входов-выходов информационного обмена между управляющими каналами, входы для приема сигналов ошибки смежных каналов, выходы для передачи сигналов ошибки, выявленных в результате мажоритирования управляющего сигнала, основной и резервный вход-выход для передачи телеметрии внешней аппаратуры, отличающаяся тем, что каждый канал включает в себя вычислительное устройство, первый выход которого подключен к основным и резервным передатчикам последовательного интерфейса, второй выход к первому входу мажоритарного элемента, являющийся резервным для формирования управляющего сигнала в собственном канале, третий вход-выход к первому входу-выходу блока контроля телеметрии, четвертый вход к четвертому выходу блока контроля ошибок, пятый - n входы информационных сигналов, подключенных к внешним выходам, последовательный интерфейс, в составе которого три основных передатчика, подключенных к внешним выходам, три резервных передатчика, подключенных к внешним выходам, три основных приемника, подключенных к внешним выходам и входам мажоритарного элемента, и три резервных приемника, подключенных к внешним выходам и входам мажоритарного элемента, блок контроля телеметрии, который имеет вход-выход, который подключен к вычислительному устройству, основной и резервный информационный канал, подключенные к внешнем выходам, мажоритарный элемент, первый вход которого подключен к вычислительному устройству, второй, третий и четвертый входы подключены к приемникам последовательного интерфейса, пятый выход подключен к восьмому входу блока контроля ошибок, шестой выход подключен к внешнему выходу управляющего сигнала, блок контроля ошибок, первый, второй, третий выходы которого подключены к внешним выходам, четвертый выход подключен к четвертому входу вычислительного устройства, пятый, шестой и седьмой входы к внешним выходам.
| СПОСОБ ФОРМИРОВАНИЯ 4-КАНАЛЬНОЙ ОТКАЗОУСТОЙЧИВОЙ СИСТЕМЫ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ ПОВЫШЕННОЙ ЖИВУЧЕСТИ И ЭФФЕКТИВНОГО ЭНЕРГОПОТРЕБЛЕНИЯ И ЕГО РЕАЛИЗАЦИЯ ДЛЯ КОСМИЧЕСКИХ ПРИМЕНЕНИЙ | 2011 |
|
RU2449352C1 |
| ТРЕХКАНАЛЬНАЯ УПРАВЛЯЮЩАЯ СИСТЕМА | 2007 |
|
RU2333529C1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1977 |
|
SU653708A1 |
| Способ изготовления деревянной обувной стельки | 1988 |
|
SU1625484A1 |

