Изобретение относится к судостроению, в частности к способам контроля мореходных качеств судов в условиях эксплуатации, и может быть использовано при создании экспертных систем безопасности мореплавания.
Известны способы контроля мореходности судна (патент RU №2040429 С1, 27.05.1995 [1], патент US №3727572 А, 17.04.1973 [2], патент US №2979010 А, 17.04.1956 [3], основанные на измерении периода бортовой качки, осадки носом и кормой "кажущегося" периода волны, курсового угла и скорости судна на нерегулярном волнении и определении расчетом метацентрической высоты, в котором дополнительно измеряют угловое перемещение судна относительно поперечной и вертикальной осей, а также линейные и угловые ускорения относительно продольной, поперечной и вертикальной центральных осей.
Техническим результатом известного способа [1] является расширение функциональных возможностей и повышение достоверности оценки мореходных качеств судов, что достигается посредством устройства, содержащего датчики курсового угла и скорости судна, значения которых вводят в ЭВМ с помощью дисплея, датчики осадок судна носом и кормой, датчики угловых перемещений при колебательном движении судна относительно продольной, поперечной и вертикальной осей, датчик ускорений всех видов качки судна на волнении, сигналы от которых через блок коммутации и предварительной обработки информации поступают для дальнейшей обработки в специализированные процессоры: процессор-классификатор, позволяющий анализировать измеряемые сигналы с целью установления их статистических характеристик, проверки свойства стационарности, идентификации их распределений и оценки спектральных плотностей, процессор-редактор, осуществляющий редактирование выбросов и масштабирование измеряемых сигналов, и метрологический процессор, выполняющий периодическую самопроверку, самокалибровку и коррекцию измерений, интеллектуальный процессор быстродействующей ЭВМ, управляющий базой данных и базой знаний экспертной системы и обеспечивающий также интерфейс с пользователем через цветной графический дисплей, вывод результатов на печать и взаимодействие между специализированными процессорами.
В соответствии с описанием [1] способ осуществляется следующим образом. Измеряют курсовой угол волны, скорость судна, кажущийся период волны, осадки носом и кормой и одновременно производят регистрацию угловых перемещений относительно продольной, поперечной и вертикальной центральных осей, а также линейных и угловых ускорений всех видов колебательного движения судна на волнении как динамической системы с шестью степенями свободы. По данным измерений устанавливают водоизмещение, фактическую метацентрическую высоту и соответствующую аппликату центра тяжести, производят оценку остойчивости, для чего вычисляют спектральную плотность и параметры морского волнения, дисперсии и среднюю частоту относительных колебаний волнового уровня относительно корпуса судна, дисперсию и среднюю частоту колебаний минимального погружения гребного винта, дисперсию рыскания, дисперсии проекций полного вектора ускорений при колебательном движении судна на волнении и производят оценку показателей, характеризующих мореходные качества судна, такие как вероятности заливания и среднего числа погружений палубы под поверхность воды за единицу времени, вероятности слеминга и среднего числа ударов за единицу времени, вероятности оголения лопастей гребного винта и среднего числа оголений за единицу времени, амплитуды рыскания, суммарные ускорения, действующие при качке судна на волнении.
Сравнительный анализ структурного состава измерительных датчиков и операций для его осуществления показывает, что известный способ не обеспечивает измерение указанных параметров, таких как "кажущий" период волны, курсовой угол волны, а позволяет определить их только косвенным путем по аналитическим зависимостям в соответствии с измеренными параметрами периода бортовой качки, осадки носом и кормой и скорости судна, а также с учетом известной зависимости метацентрической высоты от площади действующей ватерлинии.
Кроме того, при контроле мореходности судна одним из важных аспектов является процесс определения и оценки потери скорости судна на волнении. Так, например, при равенстве длины попутной волны и судна может возникнуть угроза значительной потери его остойчивости (см., например, Управление судном и его техническая эксплуатация. Под ред. Щетининой А.И. М.: Транспорт, 1983, с.). Большинство современных транспортных судов имеет прямостенные борта в средней своей части и острые обводы в носовой и кормовой оконечностях, поэтому при плавании на волнении происходит непрерывное изменение действующей ватерлинии, а следовательно, и остойчивости судна. Если при встречном волнении эти изменения происходят достаточно быстро, то при попутной волне, особенно если ее скорость близка к скорости судна, изменение площади действующей ватерлинии может наблюдаться в течение длительного времени. Снижение остойчивости может в таких случаях достигнуть опасных значений и явиться причиной опрокидывания и гибели судна.
При использовании известного способа задача определения потери скорости судна на волнении может быть решена путем выполнения вычислений в соответствии с известным аналитическим выражением зависимости потери скорости судна от волнения (см., например, - Лесков М.М., Баранов Ю.К., Гаврюк М.И. Навигация. М.: Транспорт, 1986, с.343-347), которое имеет вид: ΔV=ah+bh-chq, где h - высота волны, q - курсовой угол волны, а, b, с - коэффициенты, зависящие от типа судна, или по формуле расчета потери скорости:  , где h - высота волны, D - фактическое водоизмещение судна, Vл - скорость судна по лагу, qв - курсовой угол волны. При этом высота волны определяется из визуальных наблюдений или вычисляется по эмпирической формуле:
, где h - высота волны, D - фактическое водоизмещение судна, Vл - скорость судна по лагу, qв - курсовой угол волны. При этом высота волны определяется из визуальных наблюдений или вычисляется по эмпирической формуле:  где W - скорость ветра.
где W - скорость ветра.
Существенным препятствием использования известного способа является необходимость определения количественных параметров волнения, которые при использовании известного способа могут быть определены только косвенным путем, что снижает достоверность получения объективных оценок контроля мореходности судна. Кроме того, известный способ может быть использован только в районах с постоянным течением.
Так как в противном случае в районах, где постоянные и приливоотливные течения имеют значительные скорости, и одновременно в формировании суммарного течения при наличии ветра существенную роль играет ветровая составляющая, которая может привести к существенным ошибкам как в определении счислимых, так и счислимо-обсервованных мест судна, что может негативно сказаться на конечных результатах оценки мореходности судна.
Задачей известного технического решения (патент RU №2272739 [4]) является повышение достоверности получения объективных оценок контроля мореходности судна, которая решается за счет того, что в способе контроля мореходности судна, основанном на измерении периода бортовой качки, осадки носом и кормой, периода волны, курсового угла и скорости судна на нерегулярном волнении, определении метацентрической высоты и измерения углового перемещения судна относительно поперечной и вертикальной осей, линейных и угловых ускорений относительно продольной, поперечной и вертикальной центральных осей, дополнительно измеряют истинные высоты волн и курсовые углы прихода волн относительно диаметральной плоскости судна и определяют скорость и курсовой угол течения и величину потери скорости судна от ветра и волнения.
При этом в устройство для осуществления способа, содержащее датчик курсового угла, датчик скорости, блоки датчиков осадки судна носом и кормой, блок датчиков угловых перемещений колебательного движения судна относительно продольной, поперечной и вертикальной осей, блок датчиков ускорений судна на волнении, соединенные с блоком коммутации и предварительной обработки информации, соединенным с процессором классификатором, процессором-редактором, метрологическим процессором, которые соединены с интеллектуальным процессором, образующим ЭВМ, соединенную посредством интеллектуального процессора с дисплеем, системой документирования и экспертной системой, дополнительно введен радиовысотомер малых высот, соединенный своим выходом с ЭВМ, которая еще соединена с выходами датчика курсового угла и датчика скорости, а также выходами приемоиндикатора спутниковой навигационной системы и измерителя параметров ветра.
В отличие от известного способа контроля мореходности судна [1] в известном способе [4] обеспечивается решение инструментального измерения высоты волн и угла прихода волн относительно диаметральной плоскости судна посредством радиовысотомера малых высот с одновременным определением скорости и курсового угла течения и ввода в ЭВМ навигационных параметров от спутниковой навигационной системы и измерителя параметров волнения, что позволяет оценить потерю скорости судна от ветра и волнения, что существенно повышает достоверность объективного контроля мореходности судна.
Однако навигация в стесненных условиях судоходства (узкости, сложный рельеф береговой линии и малые глубины, узость фарватеров, маневрирование вблизи морских платформ, проходы между опорами мостов) предъявляет повышенные требования к квалификации команды крупнотоннажных и крупногабаритных судов, особенно для судов, перевозящих опасные грузы. Многочисленные аварии, зачастую с трагическими исходами, происходят из-за неквалифицированных действий команды в этих специфических условиях плавания. Кроме того, типичные значения глубин в таких районах плавания составляют величину порядка 20 м, и поскольку по правилам навигации судам с осадкой более 5 м запрещается пересекать уровень изобаты 20 м, то нетрудно понять, как сложно здесь без подготовки провести крупногабаритное судно к причалу.
Несмотря на существенный технический прогресс в развитии современных навигационных систем (радионавигация, радиолокация, спутниковые навигационные системы GPS или GLONASS), основным методом проводки судна в узкостях остается визуальный контроль положения судна относительно навигационных знаков (плавающих и стационарных буев, маяков и т.д.). Поэтому актуальной проблемой становится адекватное отображение внешней обстановки. Современные компьютерные комплексы, спутниковые данные высокого разрешения (ASTER, SRTM) и методы математического моделирования цифровых трехмерных моделей рельефа позволяют с достаточной точностью (с пространственным разрешением не хуже 20-30 м) создать модель внешней среды практически любого места Земли, включая тип растительности, строения, мосты, пирсы, платформы, отдельные скалы и т.д.
Однако в существующих навигационных комплексах не учитываются специфические эффекты, весьма важные в этих условиях плавания.
Задачей заявляемого технического решения является повышение безопасности плавания судов в стесненных обстоятельствах плавания.
Поставленная цель достигается за счет того, что в способе контроля мореходности судна, основанном на измерении периода бортовой качки, осадки носом и кормой, периода волны, курсового угла и скорости судна на нерегулярном волнении, определении метацентрической высоты и измерении углового перемещения судна относительно продольной, поперечной и вертикальной центральных осей, измерении истинных высоты волн и курсовых углов прихода волн относительно диаметральной плоскости судна и определении скорости и курсового угла течения и величины потери скорости судна от ветра и волнения, в отличие от прототипа при плавании в стесненных навигационных обстоятельствах, при подходе к таким районам получают спутниковые данные высокого разрешения типа ASTER или SRTM данного района плавания, по которым посредством программ моделирования водной поверхности типа Hydrax, атмосферных и астрономических явлений типа Skyx производится рендеринг окружающей обстановки, посредством программы PhysX восстанавливают топологию корпуса судна, путем построения цифровой модели корпуса судна по сечениям корпуса судна по шпангоутам моделируют динамику судна при прохождении района со стесненными обстоятельствами плавания с учетом волнового и ветрового воздействия, а в устройство для осуществления способа, содержащее датчик курсового угла, датчик скорости, блоки датчиков осадки судна носом и кормой, блок датчиков угловых перемещений колебательного движения судна относительно продольной, поперечной и вертикальной осей, блок датчиков ускорений судна на волнении, соединенные с блоком коммутации и предварительной обработки информации, соединенным с процессором-классификатором, процессором-редактором, метрологическим процессором, которые соединены с интеллектуальным процессором, образующим ЭВМ, соединенную посредством интеллектуального процессора с дисплеем, системой документирования и экспертной системой, радиовысотомер малых высот, соединенный своим выходом с ЭВМ, которая еще соединена с выходами датчика курсового угла, датчика скорости, а также с выходами приемоиндикатора спутниковой навигационной системы и измерителя параметров ветра, в отличие от прототипа введен аппаратно-программный блок моделирования динамики движения судна в стесненных навигационных обстоятельствах, соединенный своим входом с экспертной системой, а своим выходом с интеллектуальным процессором с дисплеем.
Сущность заявляемого технического решения поясняется чертежами (фиг.1-8).
Фиг.1. Блок-схема устройства для осуществления способа. Устройство включает блок датчиков осадки судна носом 1, блок датчиков осадки судна кормой, датчик курсового угла 3, датчик скорости 4, блок датчиков угловых перемещений 5, блок коммутации и предварительной обработки информации 6, блок датчиков ускорений 7, процессор-классификатор 9, процессор-редактор 10, метрологический процессор 11, интеллектуальный процессор 12, образующие ЭВМ 8, экспертную систему 13, включающую базу данных 14 и базу знаний 15, графический дисплей 16, систему документирования 17, радиовысотомер малых высот 18, аппаратно-программный блок моделирования динамики движения судна в стесненных навигационных обстоятельствах 19.
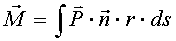
Фиг.2. Данные, полученные с радиолокатора бокового обзора, установленного на космическом аппарате. Береговая часть 20 бухты, водная поверхность 21 бухты, судно 22.
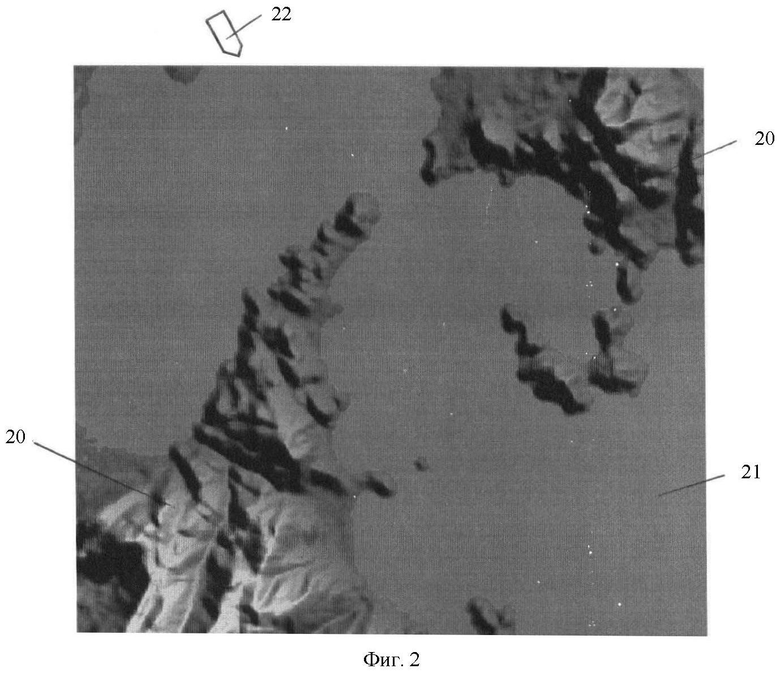
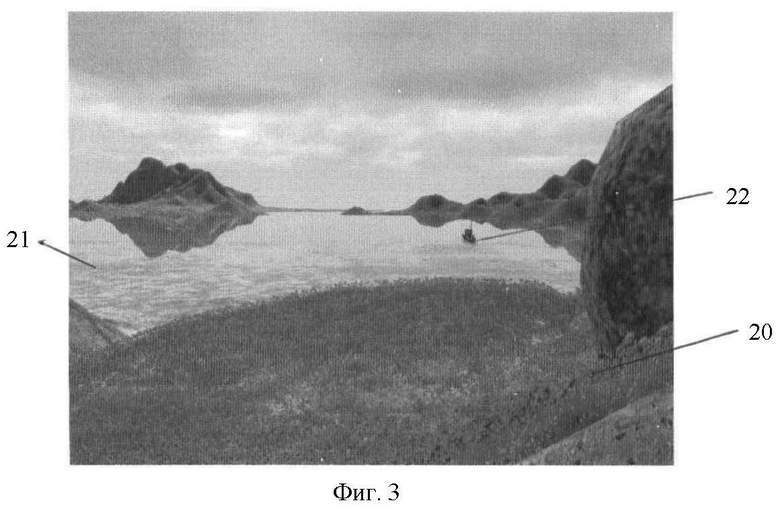
Фиг.3. Цифровая модель рельефа бухты на вход судна. Береговая часть 20 бухты, водная поверхность 21 бухты, судно 22.
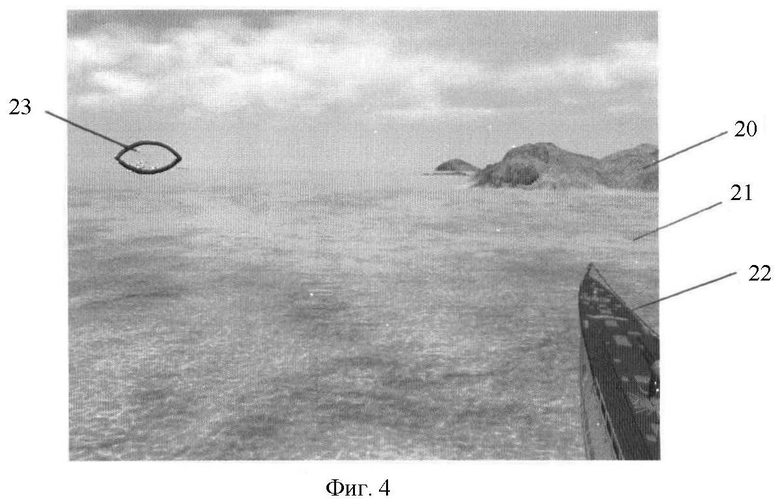
Фиг.4. Цифровая модель рельефа бухты на выход судна в светлое время суток. Береговая часть 20 бухты, водная поверхность 21 бухты, судно 22, встречное судно 23.
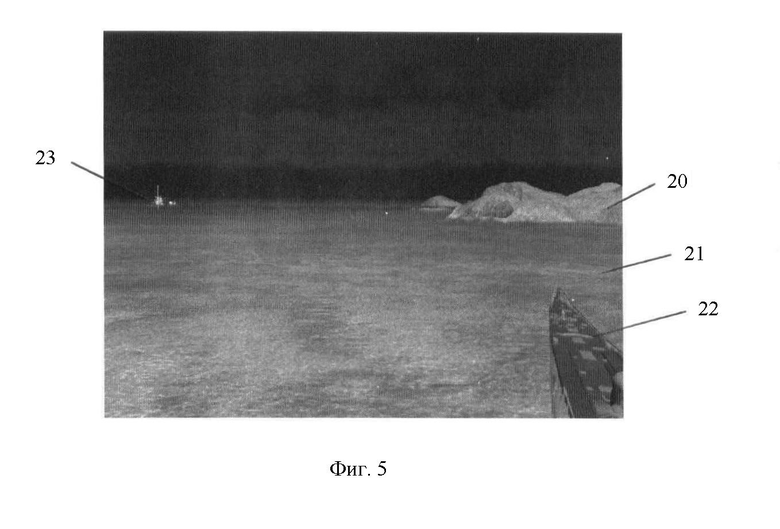
Фиг.5. Цифровая модель рельефа бухты на выход судна в ночное время суток. Береговая часть 20 бухты, водная поверхность 21 бухты, судно 22, встречное судно 23.
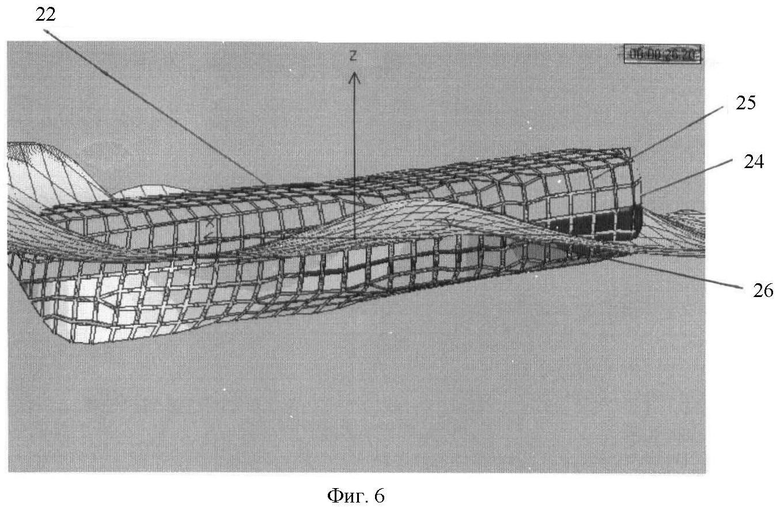
Фиг.6. Пример восстановления топологии корпуса судна по исходным данным. Корпус 24 судна 22, шпангоуты 25, морская волна 26.
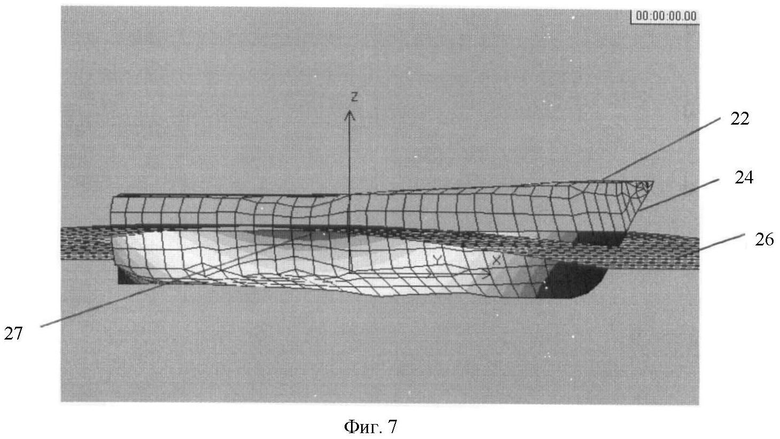
Фиг.7. Результаты расчета распределения давления на корпус судна в различные моменты времени для частоты волны, равной 0,55 рад/с, и угла распространения волн 0 градусов. Корпус 24 судна 22, морская волна 26, зоны повышенного давления 27 на корпус 24 судна 23.
Фиг.8. Цифровая модель бухты. Судно 22, водная поверхность 21 бухты, трехмерный рельеф 28 бухты.
Способ контроля мореходности судна осуществляется следующим образом. Как и в прототипе, посредством датчиков курсового угла 3 и скорости 4 измеряют соответственно курс и скорость судна. Посредством блоков датчиков 1, 2, 5, 6, 7 измеряют значения осадки носом и кормой и синхронно производят регистрацию угловых перемещений относительно продольной, поперечной и вертикальной центральных осей, а также линейных и угловых ускорений всех видов колебательного движения судна на волнении как динамической системы с шестью степенями свободы. Одновременно с этими замерами посредством высотомера малых высот 18 производят измерение высоты волн и угол прихода волн относительно диаметральной плоскости судна. По данным измерений устанавливают водоизмещение, фактическую метацентрическую высоту и соответствующую аппликату центра тяжести, производят оценку остойчивости, для чего вычисляют спектральную плотность и параметры морского волнения, дисперсии и среднюю частоту относительных колебаний волнового уровня относительно корпуса 24 судна 22, дисперсию и среднюю частоту колебаний минимального погружения гребного винта, дисперсию рыскания, дисперсии проекций полного вектора ускорений при колебательном движении судна на волнении и производят оценку показателей, характеризующих мореходные качества судна:
1. Вероятности заливания и среднего числа погружений палубы под поверхность волны за единицу времени.
2. Вероятности слеминга и среднего числа ударов за время с учетом расчетной осадки в зоне удара, ускорения свободного падения и длины судна.
3. Вероятности оголения лопастей гребного винта и среднего числа оголении за время с учетом глубины погружения оси винта и радиуса винта.
4. Амплитуды рыскания.
5. Суммарных ускорений, действующих при качке судна на волнении.
6. Потери скорости судна от ветра и волнения с учетом ветровой и волновой составляющих потерь скорости судна, скорости ветра, курсового угла ветра, параметров волны, курсового угла волнения, основных размерений надводной и подводной частей судна.
Описание процедуры обработки данных измерений выполняются с помощью спецпроцессоров и быстродействующей персональной ЭВМ и реализуется в экспертной системе, позволяющей осуществлять оценку мореходных качеств судна на основе действующих критериев и принимать обоснованные решения по обеспечению безопасности эксплуатации судна.
Устройство и принцип работы радиовысотомера малых высот 18 аналогичны прототипу. Измеренные значения высот поступают на ЭВМ, где происходит сглаживание значений текущей высоты оценками вертикальной скорости перемещения судна, а также производится вычисление оценки средней квадратической погрешности и высоты волны 3% обеспеченности. При этом при установке двух и более радиовысотомеров по бортам судна и объединении датчиков линейных и угловых скоростей и ускорений в единую инерциальную навигационную систему обеспечивается более высокая точность измерения параметров волнения и собственных горизонтальных и вертикальных перемещений судна с возможностью восстановления поля волновых возмущений с обоих бортов и выполнения контроля угловых параметров качки и осадки в реальном масштабе времени. Аппаратно-программный блок моделирования динамики движения судна в стесненных навигационных обстоятельствах 19 состоит из процессора, графических ускорителей, объектно-графического движка типа OGRE, программных модулей типа PhysX, Hydrax, Skyx и ANSYS AQWA. В качестве графического движка возможно также применение коммерческих движков типа CRY ENGINE, VALVE или аналогичных, но они имеют сравнительно высокую стоимость (порядка 0.5-1.0 млн долларов). Выбор объектно-графического движка типа OGRE для конкретной промышленной реализации обусловлен тем, что объектно-ориентированная структура OGRE позволяет достаточно просто внедрить в него современную разработку фирмы NVIDIA - систему имитации физического взаимодействия тел - PhysX.
При имитации физического взаимодействия тел в PhysX при расчетах уравнений движения можно вводить любые объективные силы и моменты, действующие на это тело (судно). При этом для конкретного обвода корпуса 24 судна 22 рассчитываются и табулируются все специфические силы и моменты с помощью программного модуля ANSYS AQWA и программных модулей PhysX (имитации физического взаимодействия тел), Hydrax (моделирования водной поверхности) и Skyx (моделирования атмосферных и астрономических явлений) на каждом шаге интегрирования из соответствующих таблиц, рассчитанных в программном модуле ANSYS AQWA, выбираются соответствующие значения сил и моментов и производится вычисление положений и ориентации судна на следующий момент времени.
По данным оцифровки соответствующие программные средства восстанавливают топологию корпуса 24 судна 22, разбивая его на некоторое количество элементов (вполне определенное).
На фиг.7 приведены результаты расчетов распределения давления на корпус судна 22 в различные моменты времени для частоты волны, равной 0.55 рад/сек, и угла распространения волн, равного 0 градусов, с выделением зоны повышенного давления 27.
Программные средства позволяют представлять распределение давления как во времени, так и в пространстве при различных углах видимости.
По величине волнения моря (в виде как одиночной волны определенной частоты и амплитуды, так и спектра (Пирсон-Мошковиц, Jonswap) и направлению распространения волн (обычно задается ряд направлений с заданным шагом по углу) можно рассчитать также силы Фруда-Крылова, дифракционные (корректировка гипотезы Фруда-Крылова), гидродинамические (качка на тихой воде), гидростатические, радиационные (при движении судна с ненулевой скоростью) для любого момента времени и для любого направления распространения волн.
В соответствующих учебных пособиях по навигации приведены методы и приемы маневрирования вблизи берега, в узкостях или шхерах, где требуются повышенные точности счисления. Во время динамических операций при изменении курса судна вводится понятие циркуляции и рекомендуются некоторые методы по счислению траектории корабля (в частности, например, метод Домогарова).
Следует отметить, как это отмечают и сами авторы пособия, метод применим при полном отсутствии волнения, ветра, неучета изменении скорости судна при маневре.
Если же волнение и ветер присутствуют, то, как следует из результатов расчета при больших значениях угла альфа, действие сил Крылова-Фруда может изменяться в десятки раз в процессе изменения курса, и результирующая траектория его движения будет существенно отличаться от траектории, полученной методом Домогарова.
При некоторых значениях курсовых углов возможна полная потеря управляемости судна (фазовая скорость волн близка к скорости корабля и сила взаимодействия среды с рулевым устройством резко уменьшается).
При этом помощью соответствующей программы это положение и ориентация судна синхронизируются в графическом движке OGRE и производится рендеринг окружающей обстановки, после завершения отрисовки цикл повторяется.
Способ в части отличительных признаков реализуется следующим образом. При плавании в открытом море на судно 22 поступает метеорологическая информации от метеорологических искусственных спутников типа «Метеор», «NOAA» или панорамной РЛС в виде снимков подстилающей поверхности и облачного покрова Земли, а также спутниковые данные, полученные с помощью радиолокатора бокового обзора (фиг.2), которые поступают и хранятся в экспертной системе 13.
При подходе к району со стесненными обстоятельствами плавания, например к бухте, посредством аппаратно-программного модуля моделирования динамики движения судна в стесненных навигационных обстоятельствах 19 строятся цифровая модель рельефа бухты на вход судна 22 (фиг.3), трехмерная модель бухты (фиг.8), цифровая модель рельефа бухты на выход судна 22 (фиг.4 и 5), что позволяет судоводителю иметь реальную картину панорамы бухты. Цифровые модели также отображают расположение средств навигационного обеспечения (маяки, знаки, отмели, скалы и т.п.).
По мере входа в бухту с учетом реальных погодных условий (скорость и направление ветра и волнения), а также с учетом маневренных характеристик судна и топологии корпуса судна (фиг.6) выполняется расчет распределения давления на корпус 24 судна 22 по маршруту движения по бухте.
Обычно при моделировании динамики судна в навигационных системах используют простые модели движения (траектория судна вычисляется как траектория материальной точки, курс судна изменяется мгновенно и скорость судна на постоянном курсе является константой). Такие упрощения неплохо применимы для моделирования движения судна в открытом море и обусловлены ограниченностью вычислительных ресурсов моделирующего компьютера, занятого, как правило, другими задачами (расчет моделей различных подсистем гидроакустических комплексов, моделированием систем оружия, моделированием систем отображения информации (СОРД, БИУС и т.д.). Лишь с появлением мощных вычислительных систем появилась возможность учета дополнительных и зачастую определяющих параметров движения судна (влияние волнения моря, ветровое воздействие, течения, динамические характеристики судна как пространственного тела сложной формы). В последнее время появились мощные программные пакеты (сертифицированные соответствующими мировыми центрами), позволяющие достаточно точно рассчитать основные силы, воздействующие на судно (с конкретными обводами корпуса) в условиях волнового воздействия (с различными типами волнового спектра Пирсона-Мошковица, JONSWAP, Филипса). Расчет возможен как в линейном приближении (как, например, программа AQWA LINE пакета ANSYS), так и с учетом нелинейности.
Для расчета сил вначале необходимо получить цифровую модель обводов корпуса корабля (используя либо информацию о сечениях корпуса по шпангоутам, либо осуществляя импорт цифровых моделей корпуса из систем автоматического проектирования (типа CATIE, ProEngineerig или подобных). Понятно, почему это важно - при расчете сил взаимодействия "смоченной" поверхности корпуса судна с идеальной жидкостью приходится вычислять интегралы типа
где интегрирование производится по криволинейной поверхности смоченной части корпуса корабля.
Заявляемый способ и устройство для его осуществления могут также найти применение при создании навигационных тренажеров.
Реализация предлагаемого способа технической трудности не представляет, так как способ реализуется с использованием штатных судовых технических средств навигации, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "промышленная применимость".
Источники информации
1. Патент RU №2040429 С1, 27.05.1995.
2. Патент US №3727572 А, 17.04.1973.
3. Патент US №2979010 A, 17.04.1956.
4. Патент RU №2272739.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272739C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2489721C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
Группа изобретений относится к области судостроения, касается технологии контроля мореходности судна и может использоваться при создании экспертных систем безопасности мореплавания. Способ контроля мореходности судна основан на измерении периода бортовой качки, осадки носом и кормой периода волны, курсового угла и скорости судна на нерегулярном волнении, определении метацентрической высоты и измерения углового перемещения судна относительно продольной, поперечной и вертикальной центральных осей. При его реализации дополнительно измеряют истинные высоты волн и курсовые углы прихода волн относительно диаметральной плоскости судна и определяют скорость и курсовой угол течения и величину потери скорости судна от ветра и волнения. Устройство для осуществления способа содержит датчик курсового угла, датчик скорости, блоки датчиков осадки судна носом и кормой, блок датчиков угловых перемещений колебательного движения судна относительно продольной, поперечной и вертикальной осей, блок датчиков ускорений судна на волнении. Предусмотрены блок коммутации и предварительной обработки информации, а также процессор-классификатор, процессор-редактор, метрологический процессор, интеллектуальный процессором, образующие ЭВМ, дисплей, система документирования, экспертная система и аппаратно-программный блок моделирования динамики движения судна в стесненных навигационных обстоятельствах. В устройство дополнительно введен радиовысотомер малых высот. Используются приемоиндикатор спутниковой навигационной системы и измеритель параметров ветра. Технический результат состоит в повышении достоверности оценки мореходных качеств судов. 2 н.п. ф-лы, 8 ил.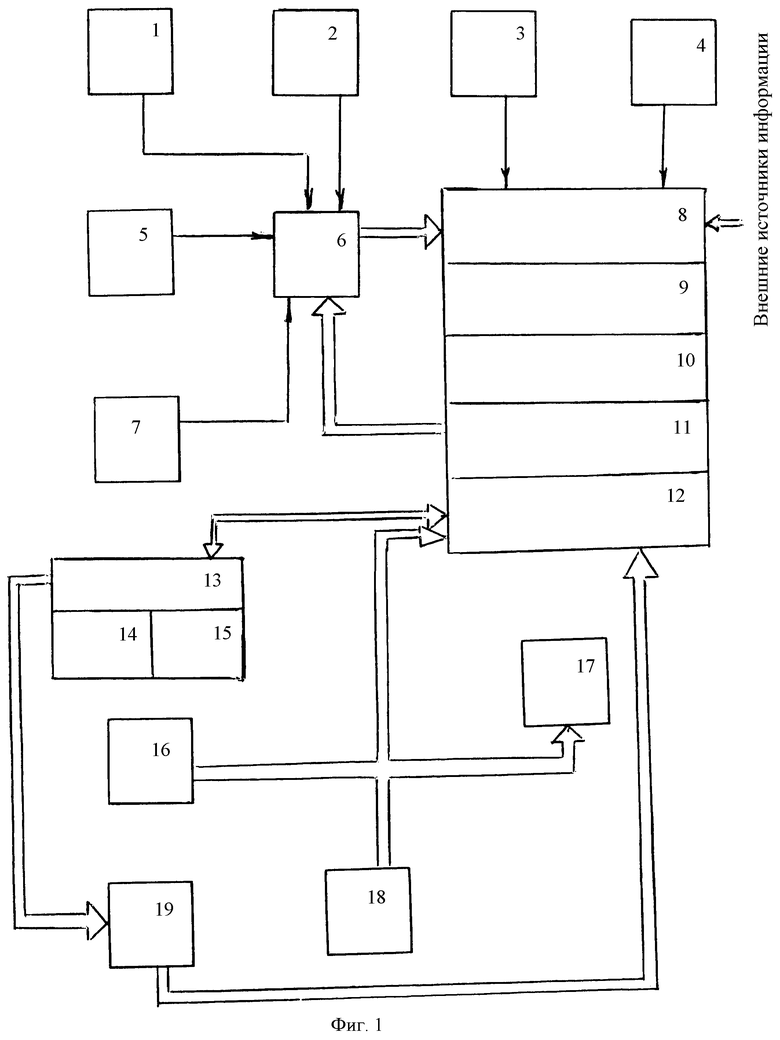
1. Способ контроля мореходности судна, основанный на измерении периода бортовой качки, осадки носом и кормой, периода волны, курсового угла и скорости судна на нерегулярном волнении, определении метацентрической высоты и измерении углового перемещения судна относительно продольной, поперечной и вертикальной центральных осей, измерение истинных высоты волн и курсовых углов прихода волн относительно диаметральной плоскости судна и определении скорости и курсового угла течения и величины потери скорости судна от ветра и волнения, отличающийся тем, что при плавании в стесненных навигационных обстоятельствах, при подходе к таким районам получают спутниковые данные высокого разрешения типа ASTER или SRTM данного района плавания, по которым посредством программ моделирования водной поверхности типа Hydrax, атмосферных и астрономических явлений типа Skyx производится рендеринг окружающей обстановки, посредством программы PhysX восстанавливают топологию корпуса судна путем построения цифровой модели корпуса судна по сечениям корпуса судна по шпангоутам, моделируют динамику судна при прохождении района со стесненными обстоятельствами плавания с учетом волнового и ветрового воздействий.
2. Устройство для осуществления способа, содержащее датчик курсового угла, датчик скорости, блоки датчиков осадки судна носом и кормой, блок датчиков угловых перемещений колебательного движения судна относительно продольной, поперечной и вертикальной осей, блок датчиков ускорений судна на волнении, соединенные с блоком коммутации и предварительной обработки информации, соединенным с процессором-классификатором, процессором-редактором, метрологическим процессором, которые соединены с интеллектуальным процессором с образованием ЭВМ, соединенной посредством интеллектуального процессора с дисплеем, системой документирования и экспертной системой, радиовысотомер малых высот, соединенный своим выходом с ЭВМ, которая еще соединена с выходами датчика курсового угла, датчика скорости, а также с выходами приемоиндикатора спутниковой навигационной системы и измерителя параметров ветра, отличающееся тем, что введен аппаратно-программный модуль моделирования динамики движения судна в стесненных навигационных обстоятельствах, соединенный своим входом с экспертной системой, а своим выходом с интеллектуальным процессором.
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272739C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1998 |
|
RU2147540C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1991 |
|
RU2040429C1 |
| US 2979010 А, 11.04.1961. | |||

