Изобретение относится к области авиационной техники, в частности к способам обслуживания авиационной техники с применением машинного зрения беспилотного летательного аппарата.
Известен способ диагностики поверхности планера самолета с использованием оптического неразрушающего контроля (ГОСТ Р58399-2019) (https://docs.cntd.ru/document/1200163947)), заключающийся в том, что осмотр осуществляется человеком при помощи органов зрения с применением средств доступа (стремянки, подъемника и др.) для обеспечения визуальных осмотров высокорасположенных поверхностей воздушного судна (далее-ВС). При этом основным инструментом диагностики является зрительный аппарат человека, который позволяет определять повреждения при качественном освещении.
Недостатками визуального осмотра являются большая трудоемкость проводимых работ по исследованию поверхности планера, обусловленная типом ВС, высокая продолжительность визуального осмотра и количество персонала, зависит от размера ВС, а также необходимо обеспечить качественное освещение в зоне проведения визуального осмотра, в связи с ограничениями разрешения человеческого зрения.
Наиболее близким аналогом является способ исследования поверхности летательного аппарата при помощи беспилотного летательного аппарата (далее-БПЛА) [RU №2734363, МПК: B64F 5/40, опубл. 15.10.2020], заключающийся в том, что на БПЛА размещают камеру высокого разрешения и лазерного радара, закрепленные на трехстепенном подвесе с сервоприводами, который в свою очередь связан с полетным контроллером для определения пространственного положения БПЛА. В программу загружают 3D модель исследуемого ЛА, и оператор вручную задает координаты в виде промежуточных точек, по которым в последующем строится траектория, в процессе облета. Данные, полученные в процессе исследования поверхности ЛА, передаются по беспроводному каналу связи на устройство вычислительной техники и производят обработку и сопоставление полученных данных с предыдущим исследованием ЛА путем наложения полученной 3D модели самолета па модель предыдущего исследования, путем анализа фотоотчета с привязкой к конструкции ЛА для определения локализации отклонения от предыдущего.
Недостатком аналога является не высокая точность исследования поверхности воздушного судна, обусловленная сложностью точной постановки камеры, а также возникновением вибрации на трехстепенном подвесе во время полета БПЛА. Кроме того, данный способ является трудоемким, поскольку требует дорогостоящего оборудования для обработки информации с БПЛА и наличия соответственного специалиста.
Техническим результатом изобретения является повышение качества диагностики поверхности планера самолета, сокращение стоимости и времени технического обслуживания, а также повышение безопасности персонала за счет применения компьютерного зрения.
Технический результат достигается способом диагностики поверхности планера самолета при помощи беспилотного летательного аппарата, заключающимся в том, что производят запуск беспилотного летательного аппарата с оборудованного места, находящегося в непосредственной близи от самолета, подлежащего диагностике, с помощью мобильного устройства оператора, который указывает тип воздушного судна, регистрационный номер и место стоянки самолета. Строят траекторию облета беспилотного летательного аппарат согласно процедуре осмотра воздушного судна, прописанной в технической документации разработчиком летательного аппарата. В процессе облета распознают повреждение при помощи исследовательской аппаратуры беспилотного летательного аппарата, выполненной в виде камеры высокого разрешения с установленным на ней поляризационным светофильтром, и закрепленной на трехстепенном подвесе с помощью силиконовой антивибрационной полки. Затем осуществляют видеофиксацию повреждения, информацию о которой передают на одноплатный компьютер беспилотного летательного аппарата, процессор которого содержит в себе программное обеспечение машинного зрения предварительно изученных дефектов поверхности планера самолета, при этом программное обеспечение самообучается в процессе диагностики, далее полученное изображение проходит через алгоритм распознавания дефектов, и, в случае обнаружения, место повреждения автоматически локализуется с привязкой к конструкции летательного аппарата. Причем информацию, полученную в процессе диагностики поверхности планера самолета, передают по каналу беспроводной связи на мобильное устройство оператора, где при помощи программного обеспечения формируют отчет в виде электронного документа, а полученный отчет заносят в единую базу данных с целью накопления информации по повреждениям с привязкой к конкретному воздушному судну.
Сущность изобретения поясняется чертежами.
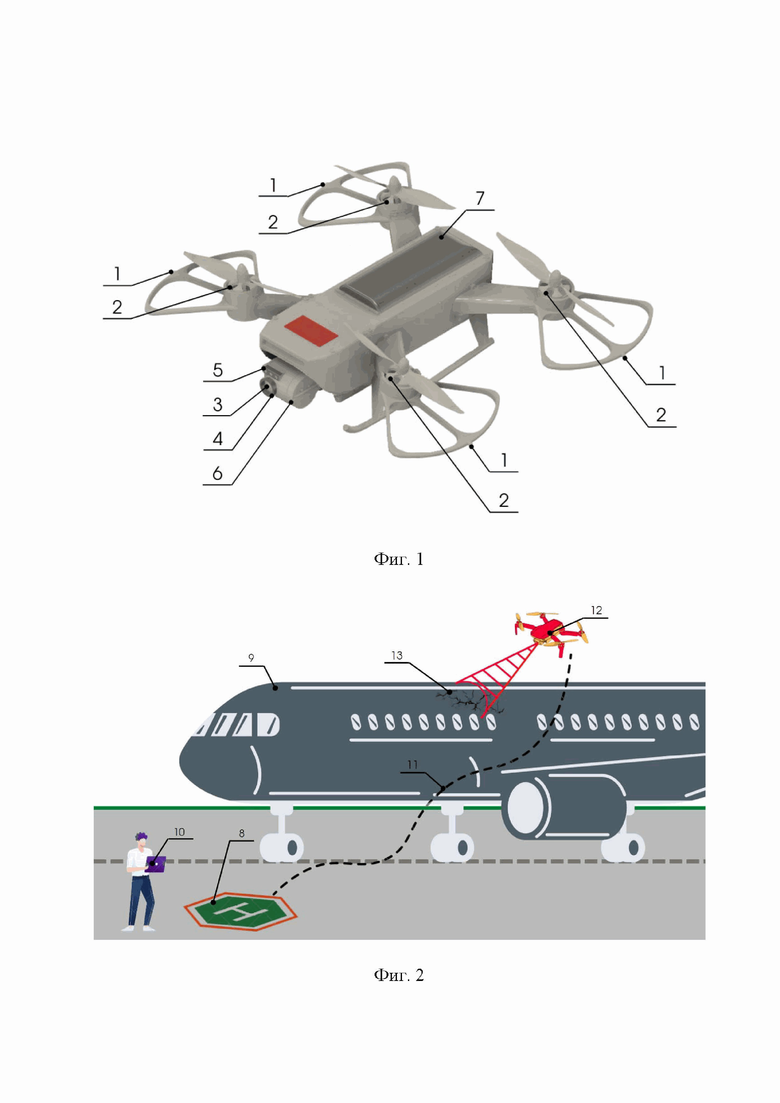
На чертеже фиг. 1 - изображен общий вид БПЛА, реализующего способ диагностики поверхности планера самолета, на фиг. 2 - представлена принципиальная схема диагностики поверхности планера самолета.
Беспилотный летательный аппарат (Фиг. 1), содержит: инфракрасный датчик приближения 1 передающий сигнал на бортовой контролер, информируя о возникшем препятствии на пути, который в свою очередь подает сигналы на управляющие органы 2 (электродвигатели) и БПЛА переходит в режим ожидания. Одновременно с этим, сигнал по каналу беспроводной связи передается на мобильное устройство (планшет) информируя оператора о возникшем препятствии на маршруте полета. После устранения препятствия, оператор через мобильное устройство продолжает полет в автоматическом режиме. Исследовательская аппаратура в виде камеры высокого разрешения 3 с поляризационным светофильтром 4, соединена с одноплатным компьютером, который в свою очередь имеет встроенный процессор, содержащий в себе программное обеспечение машинного зрения предварительно изученных дефектов поверхности планера самолета и осветительного устройства 5 закрепленных на трехстепенном демпфирующем подвесе 6. Стабилизация камеры в полете обеспечивается благодаря получаемым сигналам с гироскопа и акселерометра установленных на бортовом контроллере. Осветительное оборудование обеспечивает качественное освещение поверхности планера самолета. При этом БПЛА может быть снабжен аварийным парашютом 7 установленный в корпус конструкции.
Способ диагностики поверхности планера самолета реализуется следующем образом.
Запуск БПЛА (Фиг. 2) производится со специального оборудованного места 8, находящегося в непосредственной близи от самолета 9, с помощью мобильного устройства 10 оператора, который первым делом указывает тип воздушного судна, регистрационный номер и место стоянки самолета. После этого строится траектория облета 11 БПЛА согласно процедуре осмотра воздушного судна, прописанной в технической документации разработчиком летательного аппарата.
В процессе облета БПЛА 12 распознает и фиксирует повреждение 13 при помощи исследовательской аппаратуры. Благодаря видео фиксации получаемая информация поступает на одноплатный компьютер БПЛА, процессор которого содержит в себе программное обеспечение машинного зрения предварительно изученных дефектов (трещин, следы молний и др.) поверхности планера самолета. При этом программное обеспечение самообучается в процессе диагностики. В момент съемки полученное изображение проходит через алгоритм распознавания дефектов и в случае обнаружения, место повреждения автоматически локализуется с привязкой к конструкции летательного аппарата. Информация, полученная в процессе диагностики поверхности планера самолета, передается по каналу беспроводной связи на мобильное устройство оператора, где при помощи программного обеспечения формируется отчет, в виде электронного документа. Полученный отчет заносится в единую базу данных с целью накопления информации по повреждениям с привязкой к конкретному воздушному судну.
Таким образом изобретение позволяет повысить качество диагностики поверхности планера самолета, сократить стоимость и время технического обслуживания, а также повысить безопасность персонала и полеты воздушного судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исследование поверхности летательных аппаратов при помощи беспилотного летательного аппарата | 2020 |
|
RU2734363C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |
| ИМИТАЦИОННО-ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2012 |
|
RU2533779C2 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности ЛЭП в непрерывном режиме | 2023 |
|
RU2821208C1 |
| СПОСОБ МОНИТОРИНГА ВОЗДУШНОГО ПРОСТРАНСТВА В ЗОНАХ РАСПРОСТРАНЕНИЯ ОБЛАКОВ ВУЛКАНИЧЕСКОГО ПЕПЛА | 2015 |
|
RU2650850C2 |
| Способ обнаружения нефтезагрязнений в донных отложениях водоемов при помощи беспилотных летательных аппаратов | 2020 |
|
RU2748070C1 |
| Способ аэроэлектроразведки с применением легкого беспилотного летательного аппарата | 2020 |
|
RU2736956C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности высоковольтных ЛЭП с применением беспилотных летательных аппаратов | 2024 |
|
RU2829914C1 |
| СПОСОБ АЭРОГАММАСПЕКТРОМЕТРИЧЕСКОЙ СЪЕМКИ ГЕОЛОГИЧЕСКОГО НАЗНАЧЕНИЯ | 2017 |
|
RU2673505C1 |
| Способ определения местоположения потерявшегося человека с мобильным устройством | 2022 |
|
RU2780071C1 |
Изобретение относится к способу диагностики поверхности планера самолета при помощи беспилотного летательного аппарата. Для проведения диагностики производят запуск беспилотного летательного аппарата с оборудованного места, находящегося в непосредственной близи от самолета, подлежащего диагностике. С помощью мобильного устройства оператора, который указывает тип воздушного судна, регистрационный номер и место стоянки самолета; строят траекторию облета беспилотного летательного аппарат согласно процедуре осмотра воздушного судна, прописанной в технической документации разработчиком летательного аппарата. В процессе облета распознают повреждение при помощи камеры высокого разрешения с установленным на ней поляризационным светофильтром, и закрепленной на трехстепенном подвесе с помощью силиконовой антивибрационной полки. Далее осуществляют видеофиксацию повреждения, информацию о которой передают на одноплатный компьютер беспилотного летательного аппарата, с помощью которого осуществляют распознавание дефектов. Полученную информацию передают на мобильное устройство оператора и заносят в единую базу данных. Обеспечивается повышение качества диагностики, сокращение времени на ее проведение. 2 ил.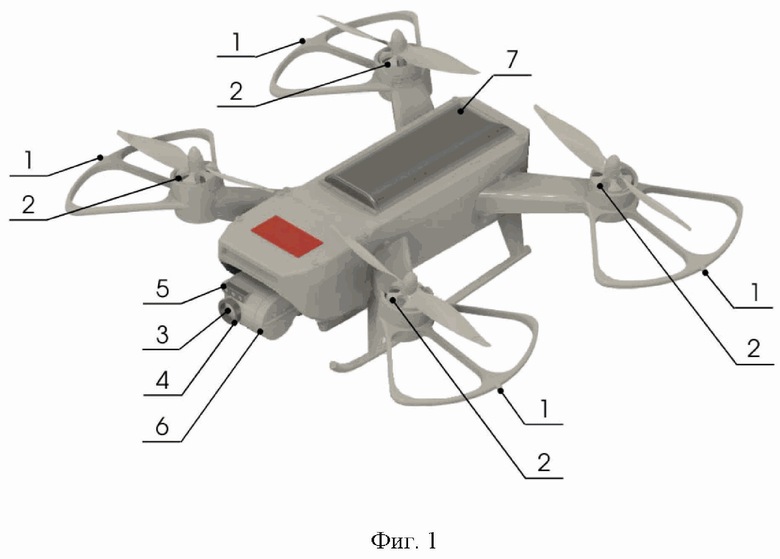
Способ диагностики поверхности планера самолета при помощи беспилотного летательного аппарата, заключающийся в том, что производят запуск беспилотного летательного аппарата с оборудованного места, находящегося в непосредственной близи от самолета, подлежащего диагностике, с помощью мобильного устройства оператора, который указывает тип воздушного судна, регистрационный номер и место стоянки самолета; строят траекторию облета беспилотного летательного аппарат согласно процедуре осмотра воздушного судна, прописанной в технической документации разработчиком летательного аппарата; в процессе облета распознают повреждение при помощи исследовательской аппаратуры беспилотного летательного аппарата, выполненной в виде камеры высокого разрешения с установленным на ней поляризационным светофильтром, и закрепленной на трехстепенном подвесе с помощью силиконовой антивибрационной полки; затем осуществляют видеофиксацию повреждения, информацию о которой передают на одноплатный компьютер беспилотного летательного аппарата, процессор которого содержит в себе программное обеспечение машинного зрения предварительно изученных дефектов поверхности планера самолета, при этом программное обеспечение самообучается в процессе диагностики, далее полученное изображение проходит через алгоритм распознавания дефектов, и, в случае обнаружения, место повреждения автоматически локализуется с привязкой к конструкции летательного аппарата; причем информацию, полученную в процессе диагностики поверхности планера самолета, передают по каналу беспроводной связи на мобильное устройство оператора, где при помощи программного обеспечения формируют отчет в виде электронного документа; а полученный отчет заносят в единую базу данных с целью накопления информации по повреждениям с привязкой к конкретному воздушному судну.
| Эл | |||
| Способ приготовления бетонной смеси | 1979 |
|
SU854910A1 |
| Исследование поверхности летательных аппаратов при помощи беспилотного летательного аппарата | 2020 |
|
RU2734363C1 |
| Способ цифрового управления процессом мониторинга, технического обслуживания и локального ремонта ВЛ и система для его осуществления | 2018 |
|
RU2683411C1 |
| EP 3497016 B1, 08.07.2020 | |||
| US 9557267 B2, | |||
