Изобретение относится к области диагностики авиационной техники (далее - AT) с применением беспилотных летательных аппаратов (далее - БПЛА) в качестве платформы для размещения инструмента для проведения неразрушающего контроля, при помощи, установленной на БПЛА аппаратуры -фото, видео, телевизионной, активных оптических систем либо какой-либо другой исследовательской аппаратуры. Данные, полученные при помощи аппаратуры, накапливаются в бортовом хранилище БПЛА и/или передаются на наземный компьютер с целью использования либо дальнейшей обработки данных при помощи программного обеспечения.
Ближайшим аналогом в предлагаемом способе данного изобретения является существующий метод визуального осмотра поверхности летательного аппарата (далее - ЛА). Он заключается в том, что осмотр осуществляется человеком (или несколькими людьми) при помощи органов зрения с применением средств доступа (стремянки, подъемники и др.) для обеспечения визуальных осмотров высокорасположенных поверхностей ЛА. При этом основным инструментом исследования является зрительный аппарат человека, который позволяет определять повреждения только в видимом диапазоне человеческого глаза и при хорошей освещенности поверхности исследования. При этом в видимый диапазон человеческого глаза не позволяет обнаружить скрытые или внутренние повреждения конструкции или поверхности ЛА из композиционных материалов.
Недостатками аналога являются:
- Высокая трудоемкость проводимых работ по исследованию поверхности ЛА от 8 до 16 часов в зависимости от размера ЛА.
- Количество потребного времени и персонала для проведения визуальных осмотров пропорционально увеличивается с увеличением размера ЛА.
- Необходимость обеспечения средствами доступа и индивидуальной защиты персонала при проведении визуальных осмотров на высоте.
- Хорошая освещенность в зоне проведения исследования поверхности ЛА.
Наиболее близким по технической сущности и достигаемому результату к предложенному решению, взятым за прототип, является заявка на изобретение «Автоматическая система взлета и посадки» US 20120078451 А1 от 29.03.2012, в которой описана автоматическая система взлета и посадки, содержащий летательный аппарат и цель взлета и посадки, в которой летающий аппарат имеет устройство съемки изображения для съемки изображений, обнаруженных в нисходящем направлении, средства навигации, и блок управления для обработки изображений, полученных устройством захвата изображения, и для управления навигационными средствами, причем блок управления вычисляет позиционное соотношение между взлетно-посадочной целью и летающим объектом на основе изображения цели взлета и посадки, полученного устройством съемки изображения, и управляет операциями взлета и посадки летающего объекта на основе результата расчета.
Недостатками прототипа являются:
- Использование устройства съемки изображения (видео или фото аппаратура) только в целях обеспечения навигации, для определения места положения взлета и посадки.
- В описании отсутствует выполнения полета по заданной траектории для более точного и качественного исследования поверхности ЛА.
- Отсутствие источника света размещенном на летательном объекте, если полет выполняется в закрытом помещении при плохой освещенности, что существенно влияет на качество проводимого исследования поверхности ЛА.
Исходя из вышеперечисленных недостатков прототипа, применение его в целях исследования поверхности ЛА в том объеме, который изложен в описании к изобретению «Автоматическая система взлета и посадки» US 20120078451 А1 от 29.03.2012 привет к снижению эффективности и увеличению времени при проведении исследования ЛА.
Поставленной задачей заявленного технического решения является устранения недостатков известного уровня техники.
Поставленный технический результат заключается в сокращении время на проведение технического обслуживания ЛА (летательного аппарата) и повышении эффективности визуальных осмотров и безопасность персонала.
Технический результат заявленного изобретения реализуется за счет использования БПЛА в качестве носителя исследовательской аппаратуры, при помощи которой реализуется исследование поверхности ЛА. На БПЛА размешается фото, видео аппаратура и лазерный радар системы исследовательской аппаратуры, при помощи которой производится исследование поверхности ЛА, так же на БПЛА размещено осветительное оборудование для повышения качества исследования при плохой освещенности и в диагностических целях. Для более дательного исследования поверхности ЛА, БПЛА оснащен системой распыления жидкости. Сам БПЛА оснащен системой автоматического взлета - посадки и полета по заданной траектории, а также датчиками и сенсорами для обнаружения препятствия. Система автоматического взлета-посадки и полета по заданной траектории реализуется за счет использования встроенного в корпус БПЛА полетного контроллера который в свою очередь имеет GPS- приемник, акселерометры, гироскоп и магнитный компас. Так же на борту БПЛА имеется приема передающее устройство видео связи, за счет которой и происходит передача видеоряда на устройство вычислительной техники, например, компьютер, планшет, смартфон или сервер, оно подключено с камерой, установленной на борту БПЛА. По контуру корпуса БПЛА (ФИГ. 1) расположены датчики обнаружения препятствия (1) передающие сигналы, получаемые чувствительным сенсором на полетный контроллер, информируя о возникшем препятствии на пути, контроллер в свою очередь подает сигналы на управляющие органы (электродвигатели) (2) и БПЛА прекращает дальнейший полет по траектории и переходит в режим ожидания. В то же время сигнал с полетного контроллера передается оператору БПЛА о переходе в режим ожидания, из-за обнаружения препятствия на пути. После устранения препятствия БПЛА продолжает полет в автоматическом режиме без участия оператора.
Исследовательская аппаратура (Фиг. 2 а, б) в виде камеры высокого разрешения (3) и лазерного радара (4) закреплена на трех-степенном подвесе (5) с сервоприводами (6) который в свою очередь связан с полетным контроллером для определения пространственного положения БПЛА получая сигналы с гироскопа и акселерометров, установленных на полетном контроллере, за счет этого обеспечивается стабилизация исследовательской аппаратуры в заданном направлении в процессе полета БПЛА. Помимо стабилизации, трех-степенном подвесе (5), так же обеспечивает перемещение исследовательской аппаратуры (вверх-вниз по оси Y, влево-вправо по оси Z и вращение по оси X), за счет этого оператор имеет возможность управлять исследовательской аппаратурой для более детального анализа поверхности в труднодоступных местах.
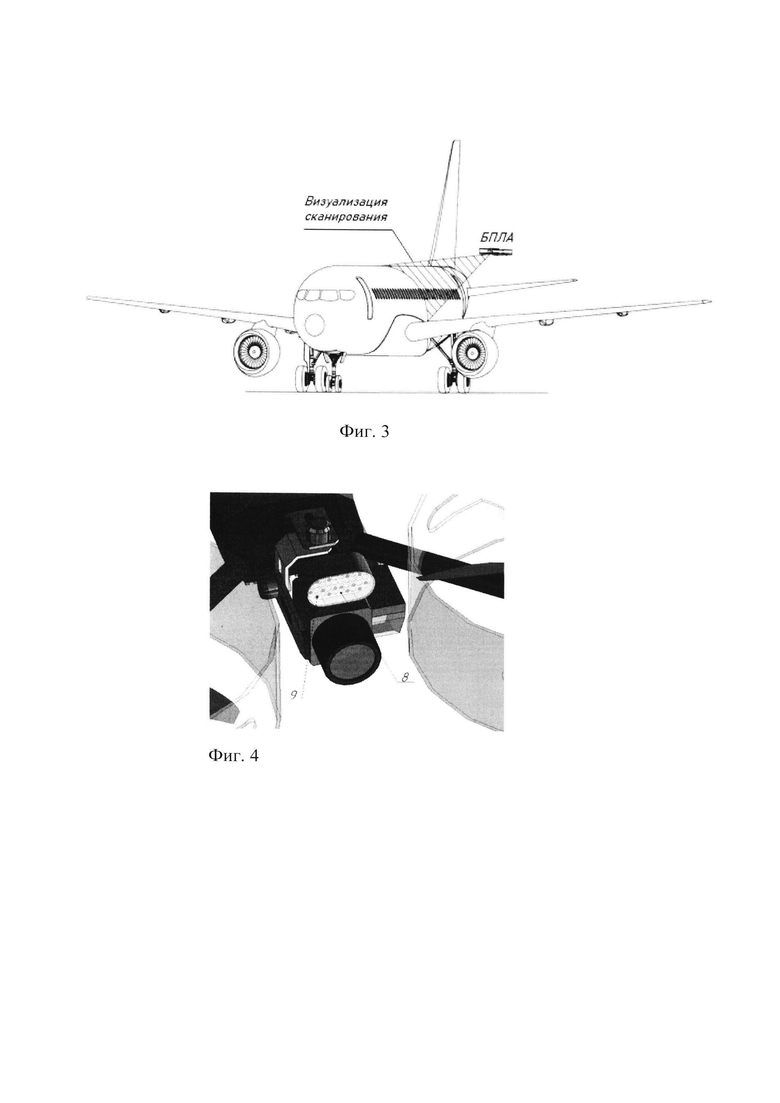
Лазерный радар (4) в процессе исследования ЛА выполняет сканирование поверхности (Фиг. З) и передает данные на персональный компьютер, где происходит построение 3D модели ЛА по координатам, получаемым от лазерного радара. Питание оборудования БПЛА обеспечивается за счет съемного аккумулятора (7) расположенного на корпусе БПЛА.
Система распыления жидкости предназначена проведения капиллярного метода неразрушающего контроля ГОСТ 18442-80 (http://docs.cntd.ru/document/1200004648), контроль проникающими веществами. В случае обнаружения несоответствия исследуемой поверхности с заданной поверхностью, программа анализирует степень несоответствия на допустимый уровень и критический. При критическом уровне дефекта поступает команда на сервопривод (17), что приводит шарнирно закрепленной штангу (15) с распылителем красящего вещества на место обнаружения критического дефекта (трещины).
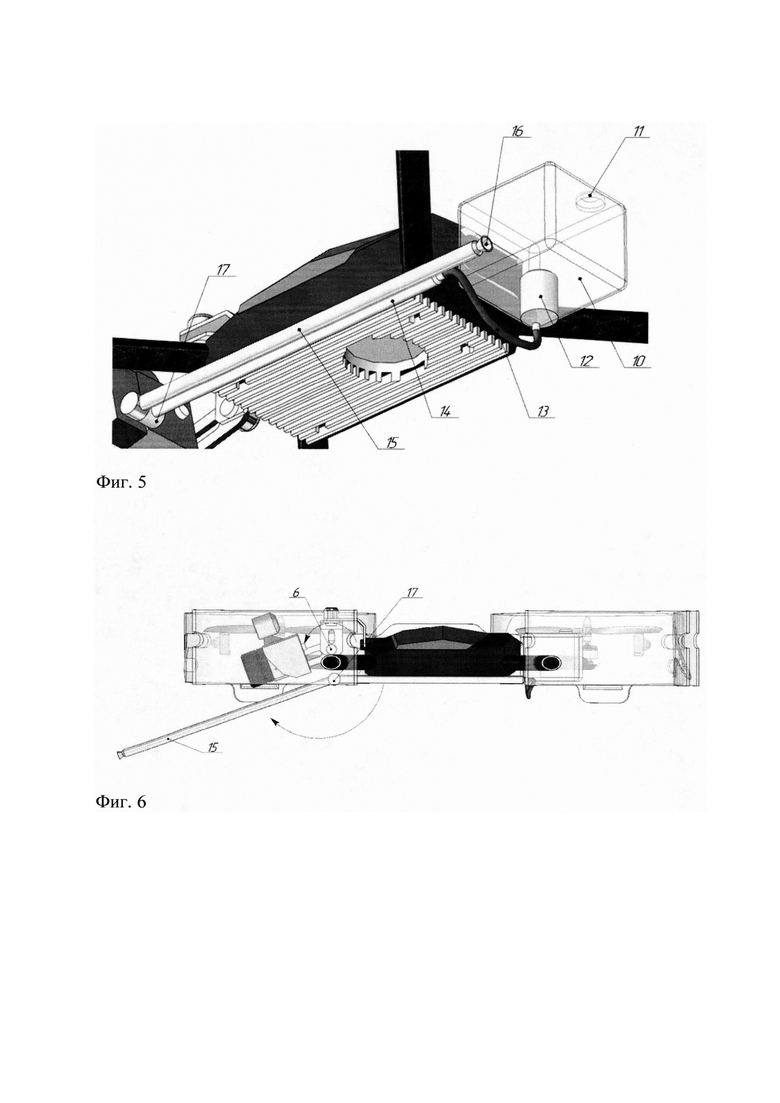
За счет использования освещения (Фиг. 4) оснащенное как белыми светодиодами (8) (https://ru.wikipedia.org/wiki/%D0%91%D0%B5%D0%BB%D1%8B%D0%B9%D1%81%D0%B2%D0%B5%D1%82%D0%BE%D0%B4%D0%B8%D0%BE%D0%B4), так и люминофорными ультрафиолетовыми (9), благодаря последним обеспечивается проведение люминесцентного метода и люминесцентно-цветного метода неразрушающего контроля ГОСТ-18353-79 (http://docs.cntd.ru/document/gost-18353-79), для проведения глубокого, инструментального исследования.
Система распыления жидкости размещена на корпусе БПЛА (Фиг. 5) и состоит из бака для жидкости (10) с заливной горловиной (11), насоса внутри бака (12), трубопровода (13) который соединяет насос с неподвижной штангой (14) к которой в свою очередь крепится шарнирно закрепленная штанга (15) с форсункой (16). В месте крепления неподвижной штанги с шарнирно закрепленной штангой установлен сервопривод (17) который обеспечивает поворот штанги в рабочее положение для распыления жидкости на объект исследования. При этом в момент поступления сигнала на сервопривод (17) так же подается сигнал на сервоприводы (6) для направления исследовательской аппаратуры в зону распыления жидкости (ФИГ. 6) После выдвижения штанги и контроллер подает сигнал на насос и тот в свою очередь подает жидкость через трубопроводы на форсунку, которая распыляет жидкость. Перед нанесением проникающей жидкости выполняются подготовительные работы.
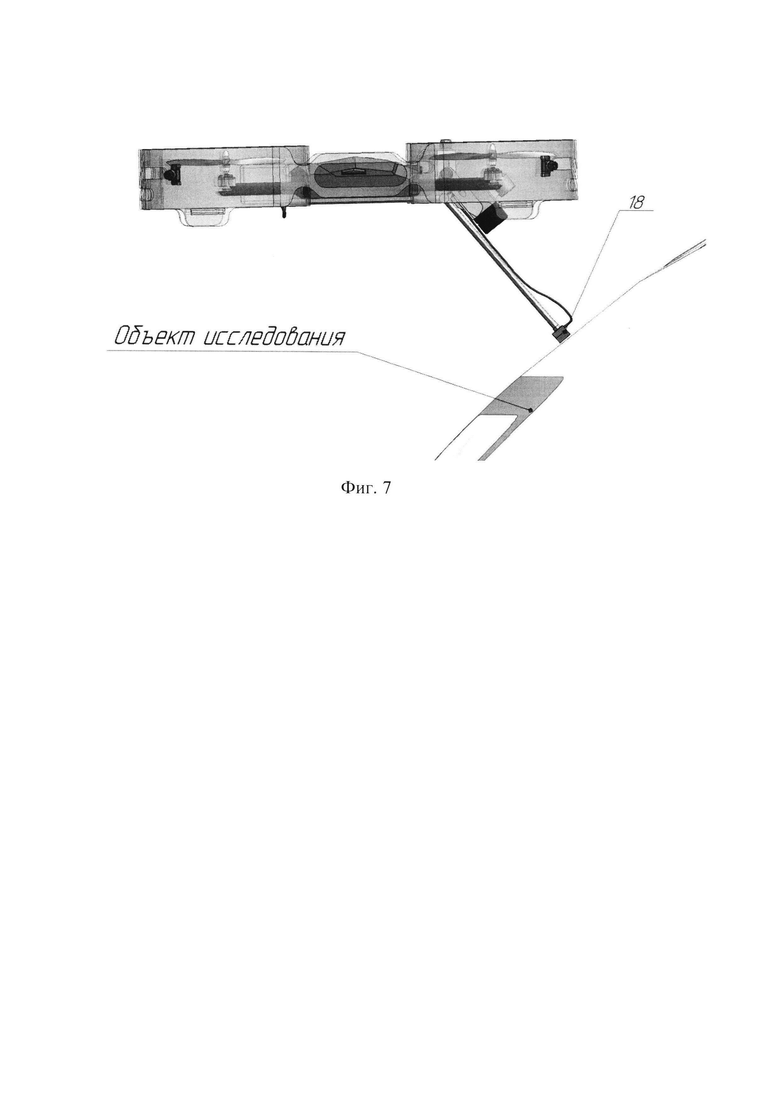
Так же зачет применения подобного механизма «выдвижной штанги», имеется возможность устанавливать на конце выдвижной штанги диагностическое оборудование (18), где необходим контакт между объектом исследования и самим оборудованием, к примеру, ультразвуковое оборудования Фиг. 7 для поиска скрытых или внутренних повреждений объекта исследования. Таким образом, по самой штанге из бочка возможна подача геля для проведения ультразвукового исследования поверхности.
Траектория полета БПЛА строится оператором согласно процедуре осмотра ЛА, прописанной в технической документации разработчиком ЛА, и зависит как от производителя, так и от типа ЛА. При этом в программу загружается 3D модель исследуемого ЛА и оператор вручную задает координаты в виде промежуточных точек по которым в последующем строится траектория.
В процессе облета, БПЛА обнаруживает и фиксирует при помощи исследовательской аппаратуры выявленные повреждения или геометрические отклонения от заданной конструкции ЛА. При этом в процессе видео и фото фиксации повреждения, автоматически локализуется место где обнаружено повреждение с привязкой к конструкции ЛА. Данные, полученные в процессе исследования поверхности ЛА передаются по беспроводному каналу связи на персональный компьютер где при помощи программного обеспечения происходит обработка и сопоставление полученных данных с предыдущим исследованием ЛА. Сопоставление результатов осуществляется по двум параметрам:
1-й параметр, путем наложения полученной 3D модели самолета по завершению последнего исследования на модель предыдущего исследования. В результате при полном совпадении всех координат (100% инверсии) формируется отчет об отсутствии геометрических отклонений с предыдущего осмотра.
2-й параметр, путем анализа фото отчета предыдущего исследования с привязкой к конструкции ЛА для определения локализации отклонения от предыдущего.
Таким образом, благодаря сопоставлению двух этих параметров, в случаи если при предыдущем осмотре была выявлена трещина на обивке ЛА с которой допускается последующая эксплуатация в пределах допуска размера трещины с контролем ее роста, то в предлагаемом методе при наложении последнего исследования с предыдущем будет определена наличии или отсутствии динамики роста, что позволит спрогнозировать в какой момент времени будет необходимо выполнить ремонт в запланированный период отработки регламента технического обслуживания ЛА тем самым существенно сократить время на дополнительные исследования и избежать в неплановые работы по ремонту ЛА.
По окончанию исследования поверхности ЛА, результаты полученных данных формируется в сводный отчет, в виде формате электронного документа. Полученный отчет заносится в единую базу данных с целью накопления информации по повреждениям с привязкой к конкретному ЛА. При использовании описываемого метода диагностики, нахождение человека (людей) непосредственно около обследуемой поверхности ЛА не требуется. Вследствие этого время на исследование поверхности ЛА при помощи предлагаемого изобретательского способа снизится на 90% от существующего.
Таким образом, испытания опытного образца, при использовании предложенного к патентованию способа показали, что достигается сокращение времени на проведение технического обслуживания ЛА (летательного аппарата) и повышается эффективность визуальных осмотров и безопасность персонала.
Анализ совокупности всех существенных признаков предложенного изобретения доказывает, что исключение хотя бы одного из них приводит к невозможности полного обеспечения достигаемого технического результата.
Анализ уровня техники показывает, что неизвестен такой способ, которому присущи признаки, идентичные всем существенным признакам данного технического решения, что свидетельствует о его неизвестности и, следовательно, новизне.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ДИАГНОСТИКИ ПОВЕРХНОСТИ ПЛАНЕРА САМОЛЕТА | 2022 |
|
RU2798602C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2024 |
|
RU2826651C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| Беспилотный летательный аппарат и способ посадки такого аппарата | 2022 |
|
RU2808061C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УТОЧНЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2794003C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2793982C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2567496C1 |
| КОМПЛЕКС ДЛЯ ПОЛУЧЕНИЯ ФОТО- И ВИДЕОИЗОБРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2823046C1 |

Изобретение относится к области авиации, в частности к способам обслуживания авиационной техники (AT) с применением беспилотных летательных аппаратов (БПЛА). Способ исследования поверхности летательных аппаратов при помощи БПЛА заключается в том, что на БПЛА размещают камеры высокого разрешения и лазерного радара, закрепленные на трехстепенном подвесе с сервоприводами, который в свою очередь связан с полетным контроллером для определения пространственного положения БПЛА. В программу загружают 3D модель исследуемого ЛА, и оператор вручную задает координаты в виде промежуточных точек, по которым в последующем строится траектория, в процессе облета. Данные, полученные в процессе исследования поверхности ЛА, передаются по беспроводному каналу связи на устройство вычислительной техники и производят обработку и сопоставление полученных данных с предыдущим исследованием ЛА путем наложения полученной 3D модели самолета на модель предыдущего исследования, путем анализа фотоотчета с привязкой к конструкции ЛА для определения локализации отклонения от предыдущего. Обеспечивается сокращение времени проведения и повышение качества технического обслуживания ЛА. 7 ил. 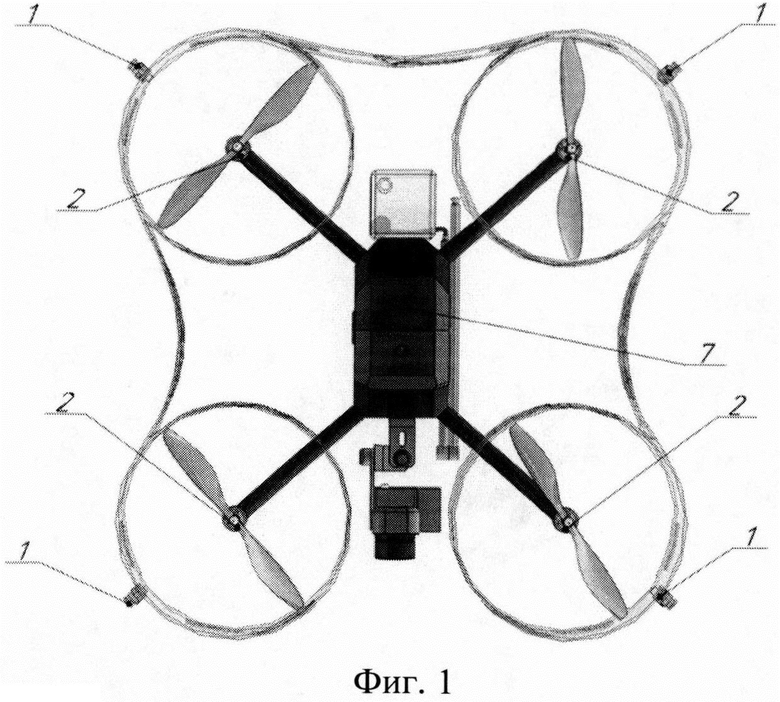
Способ исследования поверхности летательных аппаратов при помощи беспилотных летательных аппаратов (БПЛА), заключающийся в том, что на БПЛА размещают фото, видео аппаратуру и лазерный радар системы исследовательской аппаратуры, при помощи которой производят исследование поверхности летательного аппарата (ЛА), также на БПЛА размещают осветительное оборудование для повышения качества исследования при плохой освещенности и в диагностических целях, оснащают системой распыления жидкости, при этом БПЛА оснащен системой автоматического взлета-посадки и полета по заданной траектории, а также датчиками и сенсорами для обнаружения препятствия, при этом система автоматического взлета-посадки и полета по заданной траектории реализуется за счет использования встроенного в корпус БПЛА полетного контроллера, который в свою очередь имеет GPS-приемник, акселерометры, гироскоп и магнитный компас, также на борту БПЛА имеется приемопередающее устройство видео связи, подключенное с камерой, установленной на борту БПЛА, по контуру корпуса БПЛА расположены датчики обнаружения препятствия, передающие сигналы, получаемые чувствительным сенсором, на полетный контроллер, информируя о возникшем препятствии на пути, контроллер в свою очередь подает сигналы на управляющие органы (электродвигатели), и БПЛА прекращает дальнейший полет по траектории и переходит в режим ожидания, в то же время сигнал с полетного контроллера передается оператору БПЛА о переходе в режим ожидания из-за обнаружения препятствия на пути, после устранения препятствия БПЛА продолжает полет в автоматическом режиме без участия оператора, при этом исследовательская аппаратура в виде камеры высокого разрешения и лазерного радара закреплена на трехстепенном подвесе с сервоприводами, который в свою очередь связан с полетным контроллером для определения пространственного положения БПЛА, получая сигналы с гироскопа и акселерометров, установленных на полетном контроллере, при этом трехстепенной подвес обеспечивает перемещение исследовательской аппаратуры вверх-вниз по оси Y, влево-вправо по оси Z и вращение по оси X,
лазерный радар в процессе исследования ЛА выполняет сканирование поверхности и передает данные на персональный компьютер, где происходит построение 3D модели ЛА по координатам, получаемым от лазерного радара,
при этом траектория полета БПЛА строится оператором, при этом в программу загружают 3D модель исследуемого ЛА и оператор вручную задает координаты в виде промежуточных точек, по которым в последующем строится траектория,
в процессе облета БПЛА обнаруживает и фиксирует при помощи исследовательской аппаратуры выявленные повреждения или геометрические отклонения от заданной конструкции ЛА, при этом в процессе видео и фото фиксации повреждения автоматически локализуется место, где обнаружено повреждение с привязкой к конструкции ЛА, данные, полученные в процессе исследования поверхности ЛА передаются по беспроводному каналу связи на устройство вычислительной техники, где при помощи программного обеспечения происходит обработка и сопоставление полученных данных с предыдущим исследованием ЛА, при этом сопоставление результатов осуществляется по двум параметрам:
- 1-й параметр, путем наложения полученной 3D модели самолета по завершении последнего исследования на модель предыдущего исследования, в результате при полном совпадении всех координат (100% инверсии) формируют отчет об отсутствии геометрических отклонений с предыдущего осмотра;
- 2-й параметр, путем анализа с помощью устройства вычислительной техники фотоотчета предыдущего исследования с привязкой к конструкции ЛА для определения локализации отклонения от предыдущего.
| US 20190185186 A1, 20.06.2019 | |||
| CN 109927935 A, 25.06.2019 | |||
| RU 2016143565 А, 08.05.2018 | |||
| ШЕРСТОСГОННАЯ МАШИНА | 0 |
|
SU171506A1 |

