Изобретение относится к области испытаний систем автоматического управления, в частности к области экспериментальных исследований гидравлических исполнительных устройств летательных аппаратов (ЛА) и предназначено для автоматизированного управления рабочим давлением гидропитания рулевых приводов ЛА на испытательном стенде.
Известно устройство для гидропитания исполнительного элемента объекта, содержащее источник гидропитания, обратные клапаны и клапаны подпора, дифференциальный усилитель, гидрораспределитель и резервуар-гидроаккумулятор (Патент на изобретение №1657726, автор: Осадчий Г.Б., 1991 г.).
Недостатком такого устройства является невозможность его применения для гидропитания рулевых приводов ЛА, где должны быть обеспечены высокие уровни давления и динамические характеристики переходных процессов в гидросистеме.
Известна также система гидропитания стенда, предназначенная для повышения точности результатов испытаний при рациональной коммутации определенного насоса или нескольких насосов с определенной группой потребителей по потребной мощности и типу рабочей жидкости (патент на изобретение №1390435, авторы: Кочетков В.П., Макаров Ю.О., Манукян Б.С., 1988 г.).
Указанная система содержит группу насосов и потребителей, коллекторные системы, состоящие из перемычек с запорными органами, расходный бак, разделенный на отсеки, набор быстросъемных перемычек.
Такая система обладает рядом недостатков: сложность монтажа основных источников гидропитания, отсутствие автоматизированного механизма управления давлением, а также средств контроля и поддержания заданного уровня давления при мгновенных больших расходах рабочей жидкости.
Техническим результатом является увеличение точности получения результатов при экспериментальных исследованиях характеристик испытуемых гидравлических изделий на различных уровнях давления гидропитания, расширение спектра режимов испытаний, реализуемых на стенде, путем дистанционного автоматизированного управления уровнем рабочего давления гидропитания рулевых приводов ЛА при проведении экспериментальных исследований их статических и динамических характеристик на испытательном стенде, а также полунатурного моделирования динамики движения замкнутого контура «ЛА - система управления - рулевой привод». Автоматизация процессом управления давлением в системе гидропитания стенда за счет предлагаемого изобретения также позволяет снизить временные затраты на проведение экспериментальных исследований.
Технический результат достигается тем, что в системе гидропитания испытательного стенда рулевых приводов летательных аппаратов, содержащей насосную установку, испытываемый рулевой привод, дополнительно установлены фильтр тонкой очистки, манометр, трехпозиционный кран, источник электропитания, редукционный блок, состоящий из пилотного клапана с пропорциональным соленоидом и датчиком обратной связи по положению, тарельчатого клапана, редукционного клапана, состоящего из пружины и золотника, датчика давления, измерительно-вычислительный блок, состоящий из аналого-цифрового и цифроаналогового преобразователей (АЦП и ЦАП), персонального компьютера (ПК), в котором программно реализованы генератор управляющих сигналов и осциллограф, вход фильтра тонкой очистки соединен с насосной установкой, а его выход и манометр соединены с трехпозиционным краном, выходы которого соединены с испытываемым рулевым приводом напрямую и через редукционный блок, пропорциональный соленоид пилотного клапана имеет два электрических входа, соединенных с источником электропитания и с программно реализованным в персональном компьютере генератором управляющих сигналов через ЦАП, выход пропорционального соленоида механически соединен с тарельчатым клапаном, который гидравлически соединен с пружиной редукционного клапана, пружина механически соединена с золотником, гидравлические выходы которого соединены с испытываемым рулевым приводом по линии напора и с насосной установкой по линии слива, сигнальные выходы датчика обратной связи по положению пропорционального соленоида пилотного клапана и датчика давления, электрический вход которого соединен с источником электропитания, соединены со входом программно реализованного осциллографа ПК через АЦП, гидравлический выход рулевого привода соединен с насосной установкой по линии слива.
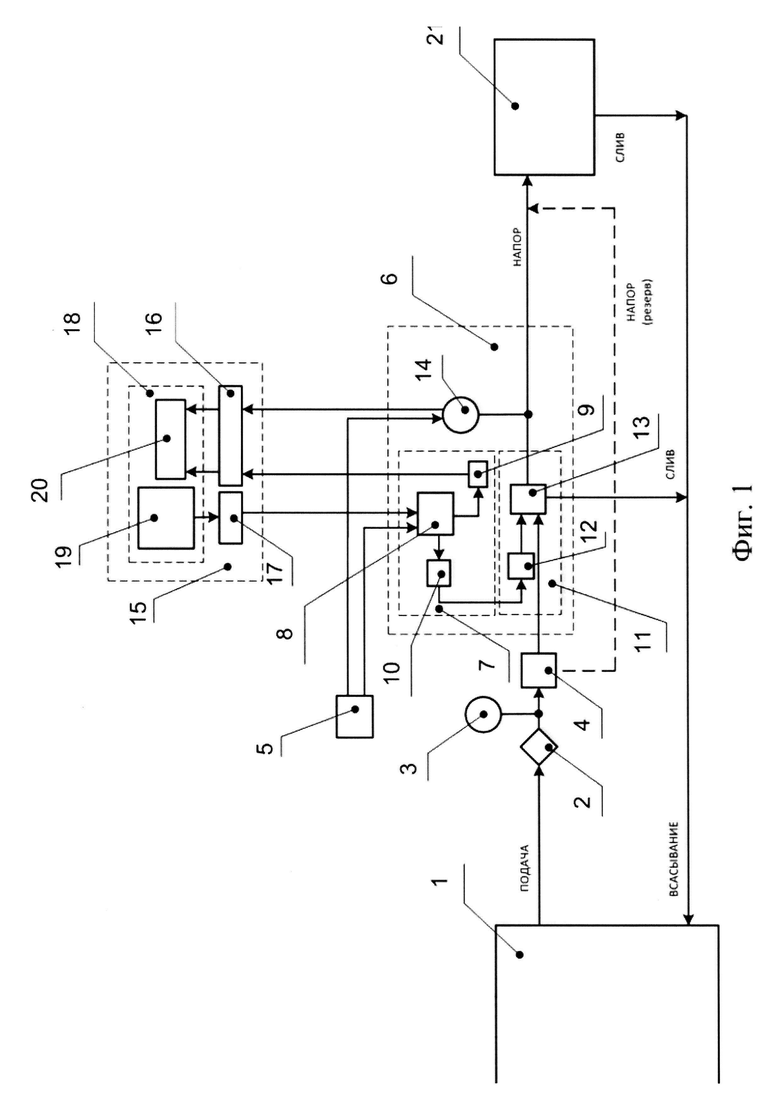
На фигуре 1 изображена схема системы гидропитания испытательного стенда рулевых приводов ЛА.
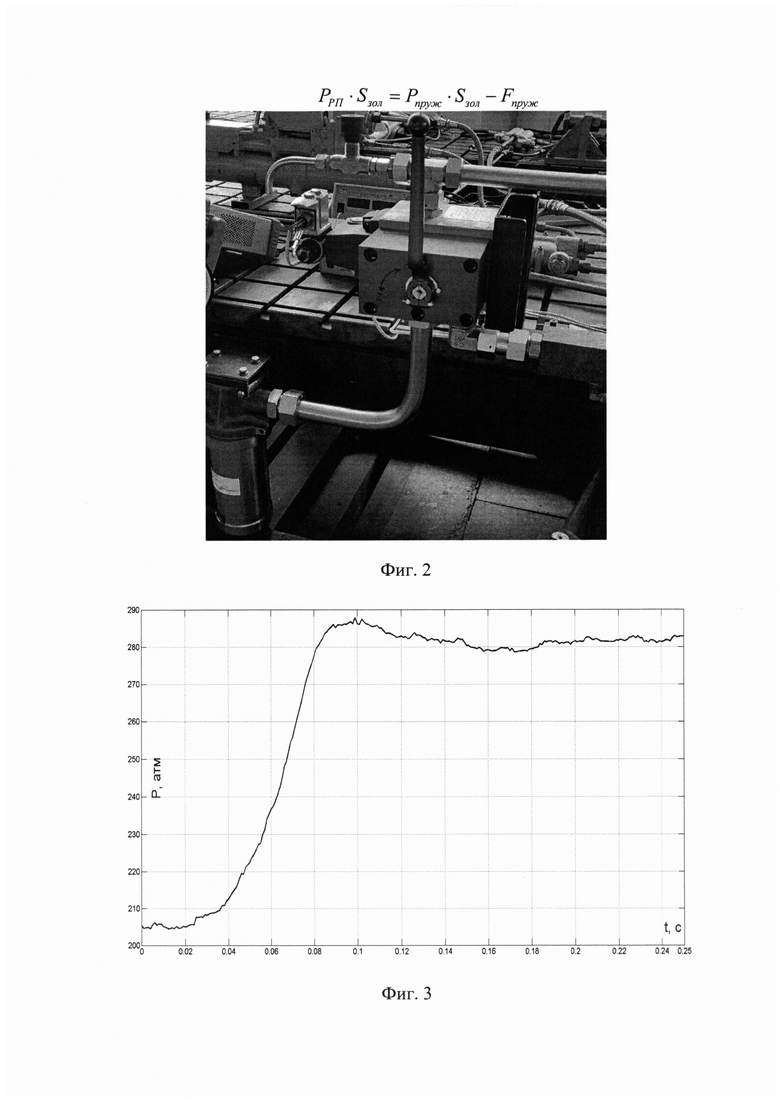
На фигуре 2 изображен внешний вид редукционного блока с трехпозиционным краном и фильтром тонкой очистки, установленные на стенде в ЦАГИ.
На фигуре 3 приведен график изменения рабочего давления подачи испытываемого рулевого привода с 205 до 280 кгс/см2 по командному ступенчатому сигналу.
Система содержит насосную установку 1, фильтр тонкой очистки 2, манометр 3, трехпозиционный кран 4, источник электропитания 5, редукционный блок 6, состоящий из пилотного клапана 7 с пропорциональным соленоидом 8 и датчиком обратной связи по его положению 9, тарельчатого клапана 10, редукционного клапана 11, состоящего из пружины 12 и золотника 13, датчика давления 14, измерительно-вычислительный блок 15, состоящий из АЦП 16 и ЦАП 17, ПК 18, в котором программно реализованы генератор управляющих сигналов 19 и осциллограф 20, испытываемый рулевой привод 21.
Вход фильтра тонкой очистки 2 соединен с насосной установкой 1, а его выход и манометр 3 соединены с трехпозиционным краном 4, выходы которого соединены с испытываемым рулевым приводом 21 напрямую и через редукционный блок 6. Пропорциональный соленоид 8 пилотного клапана 7 из состава редукционного блока 6 имеет два электрических входа, соединенных с источником электропитания 5 и с программно реализованным в ПК 18 генератором управляющих сигналов 19 через ЦАП 17. Выход пропорционального соленоида 8 механически соединен с тарельчатым клапаном 10, который гидравлически соединен с пружиной 12 редукционного клапана 11. Пружина 12 механически соединена с золотником 13, гидравлические выходы которого соединены с испытываемым рулевым приводом 21 по линии напора и с насосной установкой 1 по линии слива. Сигнальные выходы датчика обратной связи по положению 9 пропорционального соленоида 8 пилотного клапана 7 и датчика давления 14, электрический вход которого соединен с источником электропитания 5, соединены со входом программно реализованного осциллографа 20 ПК 18 через АЦП 16. Гидравлический выход рулевого привода 21 соединен с насосной установкой 1 по линии слива.
Система работает следующим образом. Включают насосную установку 1 и при помощи манометра 3 убеждаются, что настройки насосной установки 1 выполнены таким образом, что она развивает свое максимальное давление нулевой производительности, поступающее через фильтр тонкой очистки 2 рабочей жидкости к трехпозиционному крану 4. Трехпозиционный кран 4 переводят в положение подачи давления на испытываемый рулевой привод 21 через редукционный блок 6. Включают источник электропитания 5 для подачи силового постоянного напряжения на пропорциональный соленоид 8 пилотного клапана 7 и на датчик давления 14. При нулевом значении командного воздействия от генератора управляющих сигналов 19, программно установленного на ПК 18 измерительно-вычислительного блока 75 стенда, на электрическом входе пропорционального соленоида 8 пилотного клапана 7 золотник 13 редукционного клапана 11 будет находиться в нулевом положении, перекрывая связующий канал между гидравлическим входом и выходом редукционного блока 6, таким образом, давление напора на рулевом приводе 21 будет равно нулю, несмотря на наличие рабочего давления насосной установки 1 в линии подачи. При задании командного сигнала с генератора 19, который преобразуется с помощью ЦАП 17 из цифрового кода в аналоговое напряжение на электрический управляющий вход пропорционального соленоида 8, он начинает перемещать тарельчатый клапан 10 в направлении своего седла, при этом создается давление, которое поступает в камеру с пружиной 12. Пружина 12 перемещает золотник 13 редукционного клапана 11, конструктивно соединенного с пилотным клапаном 7. Смещение золотника 13 редукционного клапана 11 происходит до момента уравновешивания сил на его торцах, которое возникает при установлении заданного командного давления в системе:

где:
РРП - заданное давление на входе испытываемого рулевого привода 21;
Sзол - площадь рабочей поверхности золотника 13;
Рпруж - давление в камере пружины 12;
Рпруж - сила упругости пружины 12.
Для выхода излишнего объема гидравлической жидкости при регулировании золотник 13, перемещаясь, соединяет сливные каналы пилотного клапана 7 и редукционного клапана 11 со сливной магистралью системы гидропитания стенда.
Таким образом, текущий уровень рабочего давления гидропитания испытываемого рулевого привода 21 определяется значением электрического командного сигнала, поступающего от генератора 19 на вход пропорционального соленоида 8 пилотного клапана 7 редукционного блока 6 в соотношении (диапазоне):


Сигналы с датчика давления 14, фиксирующего давление на входе в рулевой привод, и датчика обратной связи по положению 9 пропорционального соленоида 8 поступают в измерительно-вычислительный блок 15 стенда, через АЦП 16 преобразуются в цифровой код и отображаются на осциллографе 20, программно установленном на ПК 18. Прогаммно на ПК 18 также формируется замкнутый контур управления рабочим давлением в системе, т.е. командный сигнал на электрическом входе пропорционального соленоида 8 пилотного клапана 7 устанавливается исходя из текущего значения давления на выходе из редукционного блока 6 (внешний контур), измеряемого датчиком давления 14, и сигнала положения пропорционального соленоида 8 (внутренний контур), измеряемого датчиком 9.
Предлагаемая система гидропитания испытательного стенда позволяет дистанционно, в том числе и автоматически, по различным законам управления изменять уровень давления гидропитания испытуемых изделий, а также поддерживать строго заданный уровень давления путем компенсации кратковременных просадок/забросов по давлению за счет работы устройства в замкнутом контуре управления давлением и достаточного быстродействия используемых клапанов при отработке рулевым приводом управляющих перемещений. Это приводит к увеличению точности получения результатов при экспериментальных исследованиях и достоверности снятия характеристик испытуемых гидравлических изделий при различных уровнях давления гидропитания. Другим достоинством такой системы, работающей при высоких уровнях давления гидропитания, является применение относительно простых и недорогих клапанов в составе редукционного блока и основного насоса распространенной конструкции, вместо сложных и дорогостоящих насосов высокого давления и производительности с регуляторами давления. Кроме того, снижаются временные затраты на проведение испытаний в части настройки и смены уровня рабочего давления на входе испытуемых изделий, а также расширяются возможности по организации принципиально новых видов экспериментальных тестирований гидравлических рулевых приводов ЛА.
Другим достоинством использования предлагаемой системы является возможность гидропитания нескольких рулевых приводов на испытательном стенде с различным уровнем рабочего давления от одной насосной установки.
Использование трехпозиционного крана 4 в системе позволяет формировать давление гидропитания испытываемого рулевого привода как через редукционный блок 6 в режиме дистанционного автоматизированного управления, так и напрямую через насосную установку 1, при котором давление гидропитания задается вручную на постоянном уровне путем механической регулировки насоса. Таким образом, в случае отказа редукционного блока 6 сохраняется гидропитание для выполнения заданных пунктов программы испытаний рулевых приводов.
В настоящее время в НАГИ им. Н.Е. Жуковского на стенде систем управления по отработке рулевых приводов летательных аппаратов создан и функционирует макет предлагаемой системы гидропитания. Автоматизированная система регулирования рабочим давлением подачи с дистанционным управлением позволяет проводить испытания гидравлических агрегатов в диапазоне давлений до 280 кгс/см2 с погрешностью задания не более ±2 кгс/см2. Также благодаря работе указанной системы на стенде осуществляется поддержка заданного уровня давления при значительных расходах потребителей, что гарантирует достоверность получения экспериментальных данных при определенном уровне рабочего давления. Система позволяет организовывать одновременное гидропитание нескольких потребителей различными уровнями давления от одного источника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема для нагружения конструкций при прочностных испытаниях | 2016 |
|
RU2644443C1 |
| Стенд для испытания гидроэлектромеханических агрегатов | 2016 |
|
RU2647553C2 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| СПОСОБ ГИДРАВЛИЧЕСКОГО УПРАВЛЕНИЯ ОПУСКАНИЕМ, СИСТЕМА ГИДРАВЛИЧЕСКОГО УПРАВЛЕНИЯ ОПУСКАНИЕМ И ИНЖЕНЕРНАЯ ТЕХНИКА | 2022 |
|
RU2840994C2 |
| Гибридный электрогидравлический рулевой привод | 2016 |
|
RU2704931C2 |
| Блок комбинированных гидроприводов | 2018 |
|
RU2685115C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ РУЛЕВАЯ МАШИНА СИСТЕМЫ УПРАВЛЕНИЯ НОСКОМ КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 1978 |
|
SU1840177A1 |
| Регулируемый межколесный дифференциальный механизм (МКДМ) для легковых автомобилей (4к2) | 2023 |
|
RU2819467C1 |
Изобретение относится к области испытаний систем автоматического управления, в частности к области экспериментальных исследований гидравлических исполнительных устройств летательных аппаратов и предназначена для автоматизированного управления рабочим давлением гидропитания рулевых приводов летательных аппаратов. Предлагается система гидропитания испытательного стенда рулевых приводов летательных аппаратов, содержащая насосную установку, испытываемый рулевой привод, фильтр тонкой очистки, манометр, трехпозиционный кран, источник электропитания, редукционный блок, состоящий из пилотного клапана с пропорциональным соленоидом и датчиком обратной связи, тарельчатого клапана, редукционного клапана, состоящего из пружины и золотника, датчика давления, измерительно-вычислительный блок, состоящий из аналого-цифрового и цифроаналогового преобразователей, персонального компьютера, в котором программно реализованы генератор управляющих сигналов и осциллограф. Технический результат состоит в том, что предлагаемое изобретение с введенными элементами позволяет повысить точность проведения экспериментальных исследований и улучшить достоверность снятия характеристик испытуемых гидравлических изделий при различных уровнях давления гидропитания, снизить временные затраты на проведение испытаний путем их автоматизации и расширить возможности по организации принципиально новых видов экспериментальных тестирований гидравлических рулевых приводов летательных аппаратов. 3 ил.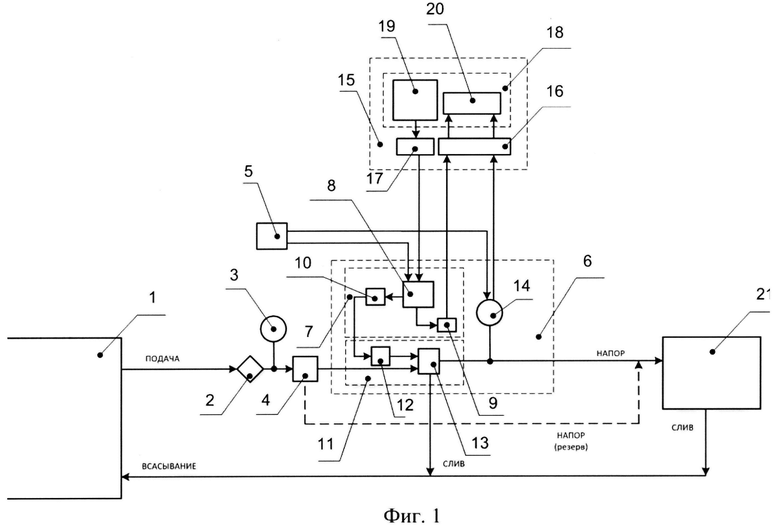
Система гидропитания испытательного стенда рулевых приводов летательных аппаратов, содержащая насосную установку, испытываемый рулевой привод, отличающаяся тем, что дополнительно установлены фильтр тонкой очистки, манометр, трехпозиционный кран, источник электропитания, редукционный блок, состоящий из пилотного клапана с пропорциональным соленоидом и датчиком обратной связи по положению, тарельчатого клапана, редукционного клапана, состоящего из пружины и золотника, датчика давления, измерительно-вычислительный блок, состоящий из аналого-цифрового и цифроаналогового преобразователей, персонального компьютера, в котором программно реализованы генератор управляющих сигналов и осциллограф, вход фильтра тонкой очистки соединен с насосной установкой, а его выход и манометр соединены с трехпозиционным краном, выходы которого соединены с испытываемым рулевым приводом напрямую и через редукционный блок, пропорциональный соленоид пилотного клапана имеет два электрических входа, соединенных с источником электропитания и с программно реализованным в персональном компьютере генератором управляющих сигналов через цифроаналоговый преобразователь, выход пропорционального соленоида механически соединен с тарельчатым клапаном, который гидравлически соединен с пружиной редукционного клапана, пружина механически соединена с золотником, гидравлические выходы которого соединены с испытываемым рулевым приводом по линии напора и с насосной установкой по линии слива, сигнальные выходы датчика обратной связи по положению пропорционального соленоида пилотного клапана и датчика давления, электрический вход которого соединен с источником электропитания, соединены с входом программно реализованного осциллографа персонального компьютера через аналого-цифровой преобразователь, гидравлический выход рулевого привода соединен с насосной установкой по линии слива.
| СТЕНД ДЛЯ ИСПЫТАНИЙ ЭЛЕМЕНТОВ ГИДРОАГРЕГАТА РУЛЕВОГО УПРАВЛЕНИЯ | 2000 |
|
RU2173414C1 |
| Стенд для испытаний винтовых преобразователей | 1980 |
|
SU985485A1 |
| ЖАРОСТОЙКИЙ ПРОВОДНИК | 1962 |
|
SU205086A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2692884C1 |
| US 20120260643 A1, 18.10.2012. | |||
