Изобретение относится к оптическим устройствам зондирования атмосферы с целью обнаружения наличия зоны ограниченной видимости для судна путем обнаружения плотных аэрозольных образований (тумана, мглы, снегопада, сильного ливня и т.п.) на расстоянии, установленном Международными морскими правилами. Изобретение предназначено для повышения безопасности судоходства и может быть использовано также в наземном и воздушном транспорте для заблаговременного предупреждения об опасности, когда визуальная информация о состоянии окружающего воздушного пространства имеет большое значение, и видимость в нем может быть ограничена различными метеорологическими явлениями, антропогенными или иными факторами. Изобретение может быть также использовано для решения экологических задач атмосферы, в частности, при картировании пространственно-временного распределения аэрозольных полей антропогенного происхождения в воздушном бассейне промышленного центра, при контроле трансграничных переносов аэрозольных примесей в период лесных пожаров и активной вулканической деятельности.
В основе работы лидаров лежит технология, включающая в себя излучение света лазером и последующую регистрацию времени возвращения отраженного луча фотоприемным устройством.
Известен сканирующий лидар, RU 161516 U1, опубл. 20.04.2016, предназначенный для дистанционного определения места положения и оптико-микрофизических параметров плотных аэрозольных образований (облака и дымовые шлейфы) в атмосфере. Лидар содержит оптический узел, включающий импульсный лазер, фотоприемник, расположенный на двухкоординатной поворотной платформе, валы вращения двигателей которой снабжены позиционными датчиками, обеспечивающими информацию об угловом положении платформы в горизонтальной и вертикальной плоскостях, а также управляющий вычислительный комплекс, подключенный к лазеру, фотоприемному блоку, двигателям и цифровому контроллеру. На валах вращения двигателей установлены диски с кодированной магнитной лентой, последовательность кодов которой об угловом положении поворотной колонки считывается бесконтактными сенсорными магнитными датчиками, закрепленными неподвижно на корпусе платформы над поверхностью магнитной ленты. В непосредственной близости бесконтактного сенсорного магнитного датчика установлен цифровой контроллер, осуществляющий сбор кодов об угловом положении и их первичную обработку, вход которого подключен к магнитному датчику, а выходы к управляющему вычислительному комплексу и непосредственно к двигателю.
Недостатком описанного лидара является невысокая помехоустойчивость ввиду отсутствия учета времени пролета светового импульса излучения лазера до аэрозольных образований атмосферы и обратно до фотоприемника. Кроме того, запуск импульсного лазера перед началом акта измерения, а также процесс позиционирования подвижной платформы с помощью электродвигателей, замедляют работу устройства и препятствуют оперативному получению информации о прозрачности воздушной среды в интересующем направлении.
Известен лидарный комплекс для зондирования плотных аэрозольных образований атмосферы, RU 155857 U1, опубл. 20.10.2015. Лидар содержит оптический узел, включающий лазер, фотоприемник (телескоп) и полупрозрачное зеркало, расположенное под углом 45° к оптической оси фотоприемника; лидар также содержит подключенное к лазеру и фотоприемнику устройство синхронизации излучения лазера и регистрации светового луча обратного рассеяния, отраженного от аэрозольных образований атмосферы. Для регистрации светового луча обратного рассеяния используется тот же старт-импульс, что и для возбуждения излучения лазера. В приемном канале лидара после приемного телескопа, формирующего квазипараллельный пучок излучения, установлена стеклянная плоскопараллельная пластинка, разделяющая излучение на два пучка, на пути одного из которых располагается фотоприемный модуль и система регистрации, а в другом расположена видеокамера, ось наблюдения которой совпадает с оптической осью лидара, при этом часть излучения лазера с помощью отклоняющей пластинки отводится на фотодатчик, формирующий старт-импульс, подающийся на входы синхронизации фотоприемного модуля и видеокамеры.
Описанный лидарный комплекс принят в качестве прототипа настоящего изобретения.
Недостатком прототипа является невысокая помехоустойчивость ввиду отсутствия защиты от ложного срабатывания от ложных импульсов, обусловленная:
- отсутствием учета времени пролета светового импульса излучения лазера до аэрозольных образований атмосферы и обратно до фотоприемника, т.к. используется один и тот же старт-импульс для возбуждения излучения лазера и регистрации светового луча обратного рассеяния, отраженного от аэрозольных образований атмосферы;
- отсутствием исключения влияния посторонних источников, например, солнечного света, на освещенность объекта зондирования. Посторонняя засветка зоны зондирования способна исказить полученную информацию и сделать ничтожным результат зондирования;
- отсутствием защиты от регистрации ложных импульсов, отраженных от случайных турбулентностей или включений в атмосферу.
Задачей настоящего изобретения является повышение помехоустойчивости лидара за счет исключения формирования ложного срабатывания от ложных импульсов, возникающих от случайных турбулентностей или включений в атмосферу, за счет:
- формирования временного окна регистрации отраженного от объекта зондирования светового импульса путем оценки времени пролета светового импульса от лазера до объекта зондирования и назад до фотоприемника и задержки регистрации отраженного светового импульса после оценки по двуальтернативному критерию - соответствует ли оно величине, заданной в качестве признака тревожной ситуации, т.е. приближения судна к границе зоны видимости;
- исключения влияния посторонних источников, например, солнечного света, на освещенность объекта зондирования путем использования помехозащитного оптического фильтра, позволяющего фиксировать световой поток исключительно той длины волны, которая излучается зондирующим лазером;
- защиты от регистрации ложных импульсов, отраженных от случайных турбулентностей или включений в атмосферу, путем формирования временного окна регистрации отраженных импульсов и установления порога вырабатывания тревожного сигнала;
- использования в качестве источника света лазера с фиксированной длиной волны излучения и согласования его по спектральной характеристике с узкополосным оптическим фильтром, что обеспечивает подавление световых помех других частей спектра.
Поставленная задача решается за счет того, что, в лидаре для зондирования плотных аэрозольных образований атмосферы, содержащем оптический узел, включающий лазер, фотоприемник и полупрозрачное зеркало, расположенное под углом 45° к оптической оси фотоприемника, а также подключенное к лазеру и фотоприемнику устройство синхронизации излучения лазера и регистрации светового луча обратного рассеяния, отраженного от аэрозольных образований атмосферы, при этом оптическая ось фотоприемника совпадает с направлением излучения лазера, согласно изобретению, на пути принятого светового луча обратного рассеяния перед фотоприемником установлен узкополосный фильтр, при этом устройство синхронизации содержит синхронизирующий генератор, регулятор задержки и ключевое устройство, причем генератор выполнен с возможностью формирования на одном выходе, подключенном к входу лазера, импульсов с частотой F/2, а на втором выходе, подключенном к входу регулятора задержки, импульсов с частотой F, при этом выход регулятора задержки подключен к управляющему входу ключевого устройства, к информационному входу которого подключен выход фотоприемника, а выход ключевого устройства через узкополосный фильтр подключен к входу порогового устройства, выход которого является выходом лидара.
Предпочтительно, генератор содержит первый источник тактовых импульсов, выход которого подключен к входу первого двоичного счетчика, первый выход которого подключен к входу первого мультивибратора для формирования на его выходе, подключенном к входу лазера, импульсов с частотой F/2, а второй выход которого через первый дешифратор подключен к входу второго мультивибратора для формирования на его выходе, подключенном к входу регулятора задержки, импульсов с частотой F.
Предпочтительно, регулятор задержки содержит второй источник тактовых импульсов, первый вход которого подключен к выходу генератора, формирующего импульсы с частотой F, а выход источника тактовых импульсов подключен к первому входу второго двоичного счетчика, выход которого через первый выход второго дешифратора подключен к второму входу второго источника тактовых импульсов, при этом второй выход второго дешифратора подключен к второму входу двоичного счетчика, а третий выход второго дешифратора подключен к входу третьего мультивибратора, выход которого подключен к управляющему входу ключевого устройства.
Лидар может содержать пульт оператора, выходы которого подключены к управляющим входам генератора и регулятора задержки, при этом управляющий вход первого источника тактовых импульсов может быть подключен к выходу пульта оператора, а управляющий вход второго источника тактовых импульсов может быть подключен к выходу пульта оператора.
Заявителем не выявлены какие-либо технические решения, идентичные заявленному, что позволяет сделать вывод о соответствии изобретения условию патентоспособности «Новизна».
Благодаря реализации совокупности ограничительных и отличительных признаков изобретения достигается новый технический результат - повышение помехоустойчивости лидара за счет исключения формирования ложного срабатывания от ложных импульсов, возникающих от случайных турбулентностей или включений в атмосферу.
Формирование временного окна регистрации светового луча обратного рассеяния обеспечено за счет определения и учета ожидаемого времени Т1 пролета светового импульса от лазера до границы зоны ограниченной видимости и обратно до фотоприемника, а также за счет формирования регулятором задержки времени Т2 задержки момента начала приема фотоприемником отраженного светового импульса относительно переднего фронта светового импульса, излучаемого лазером.
Исключение влияния посторонних источников, например, солнечного света, на освещенность объекта зондирования обеспечивается использованием помехозащитного оптического фильтра, позволяющего фиксировать световой поток исключительно той длины волны, которая излучается зондирующим лазером.
Использование в качестве источника света лазера с фиксированной длиной волны излучения и согласования его по спектральной характеристике с узкополосным оптическим фильтром обеспечивают подавление световых помех других частей спектра.
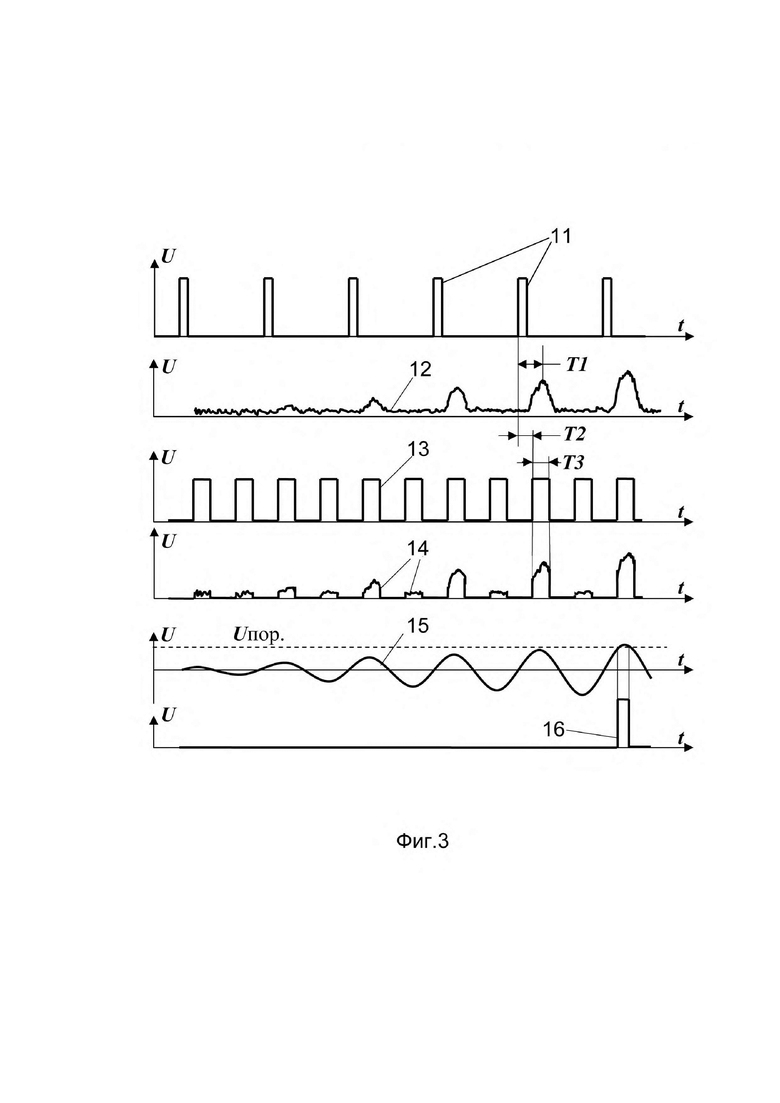
Защита от регистрации ложных импульсов, отраженных от случайных турбулентностей или включений в атмосферу, обеспечивается за счет формирования генератором окна регистрации светового луча обратного рассеяния с частотой, в два раза превышающей частоту излучения лазера. В результате этого ключевое устройство фиксирует участки принимаемого сигнала попеременно - с наличием и с отсутствием результатов приема фотоприемником зондирующего импульса от лазера. Рассеяние света неоднородностями атмосферы происходит во всех направлениях, однако, благодаря так называемому «эффекту усиления обратного рассеяния», интенсивность рассеяния в обратном направлении, т.е. к источнику светового излучения, значительно превышает рассеяние в других направлениях, поэтому принимаемый сигнал с наличием результатов приема значительно превышает сигнал при отсутствии результатов приема. Порог для вырабатывания тревожного сигнала (Uпор. на Фиг. 3) устанавливают превышающим величину сигнала при отсутствии результатов приема зондирующего импульса.
Заявителем не выявлены источники информации, в которых содержались бы сведения о влиянии отличительных признаков изобретения на достигаемый технический результат. Указанные обстоятельства позволяют сделать вывод о соответствии заявленного технического решения условию патентоспособности «Изобретательский уровень».
Сущность изобретения поясняется чертежами, на которых изображено:
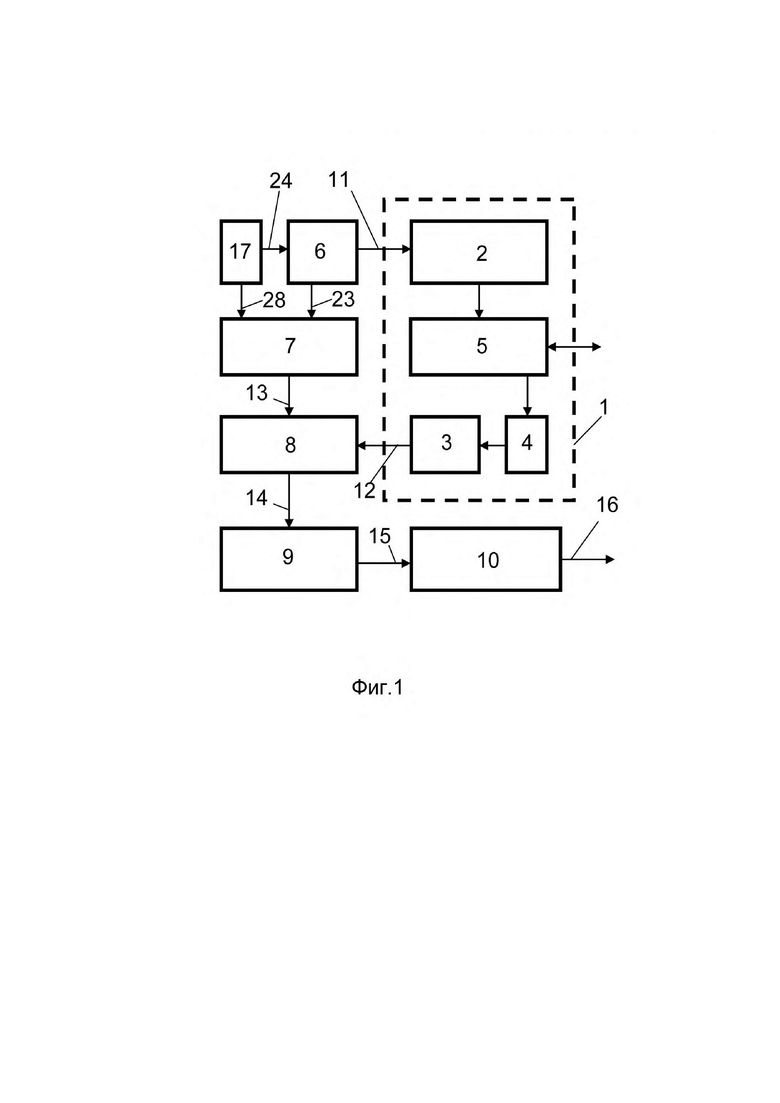
на Фиг. 1 - блок-схема лидара для зондирования плотных аэрозольных образований атмосферы;
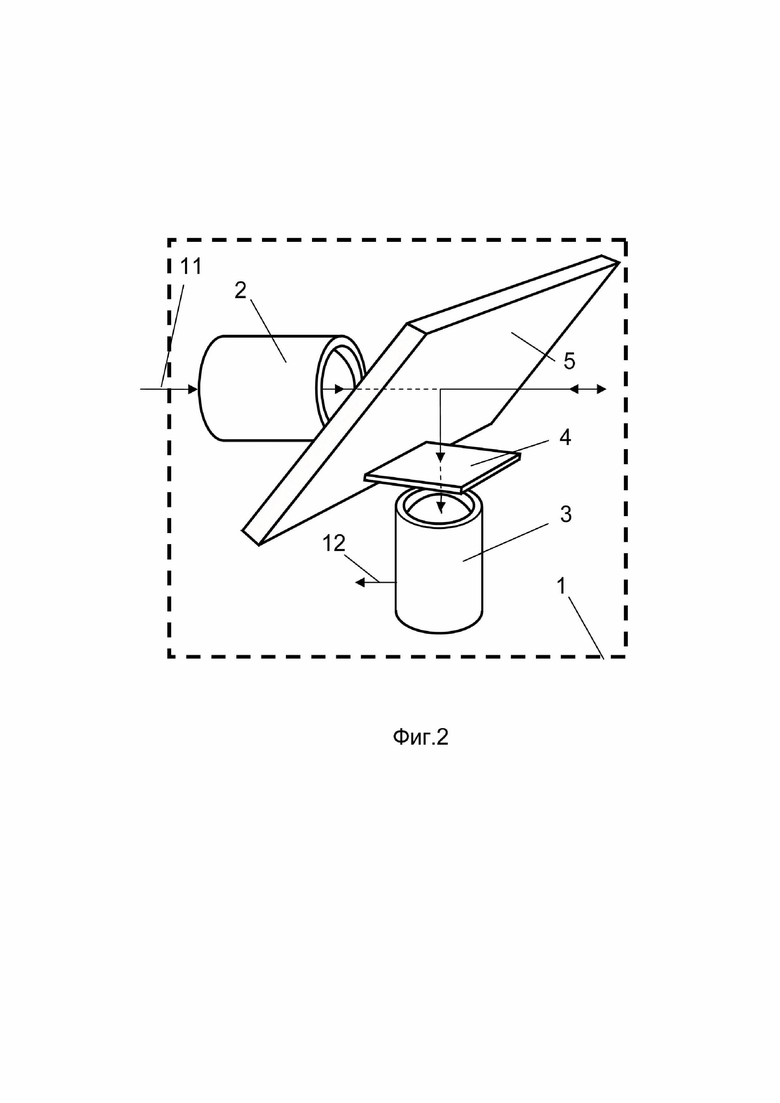
на Фиг. 2 - схематично оптический узел;
на Фиг. 3 - временная диаграмма формирования тревожного сигнала о приближении к границе зоны ограниченной видимости;
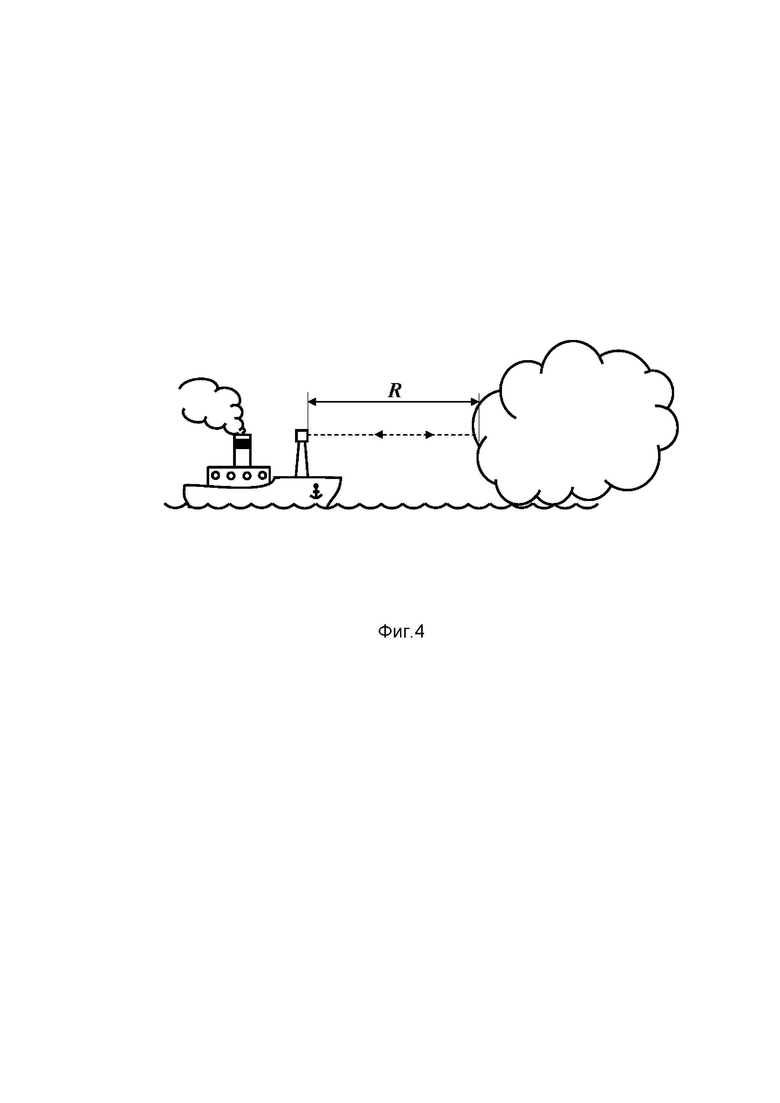
на Фиг. 4 - пример расположения лидара на борту судна;
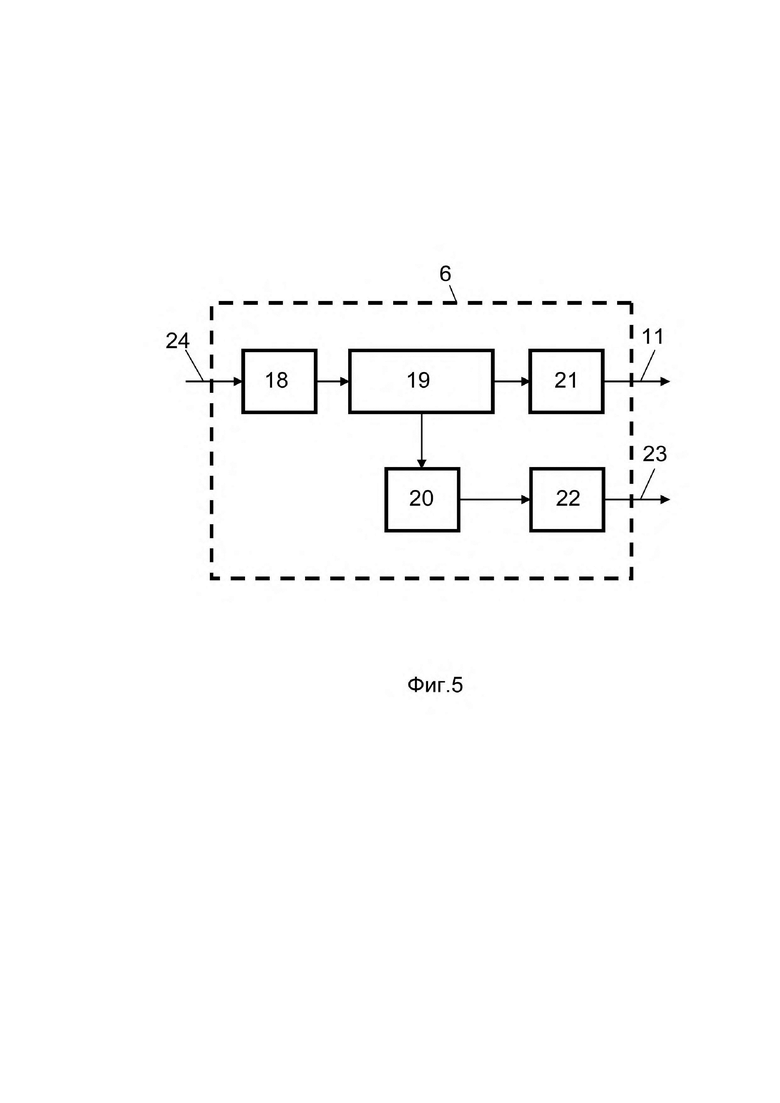
на Фиг. 5 - блок-схема генератора;
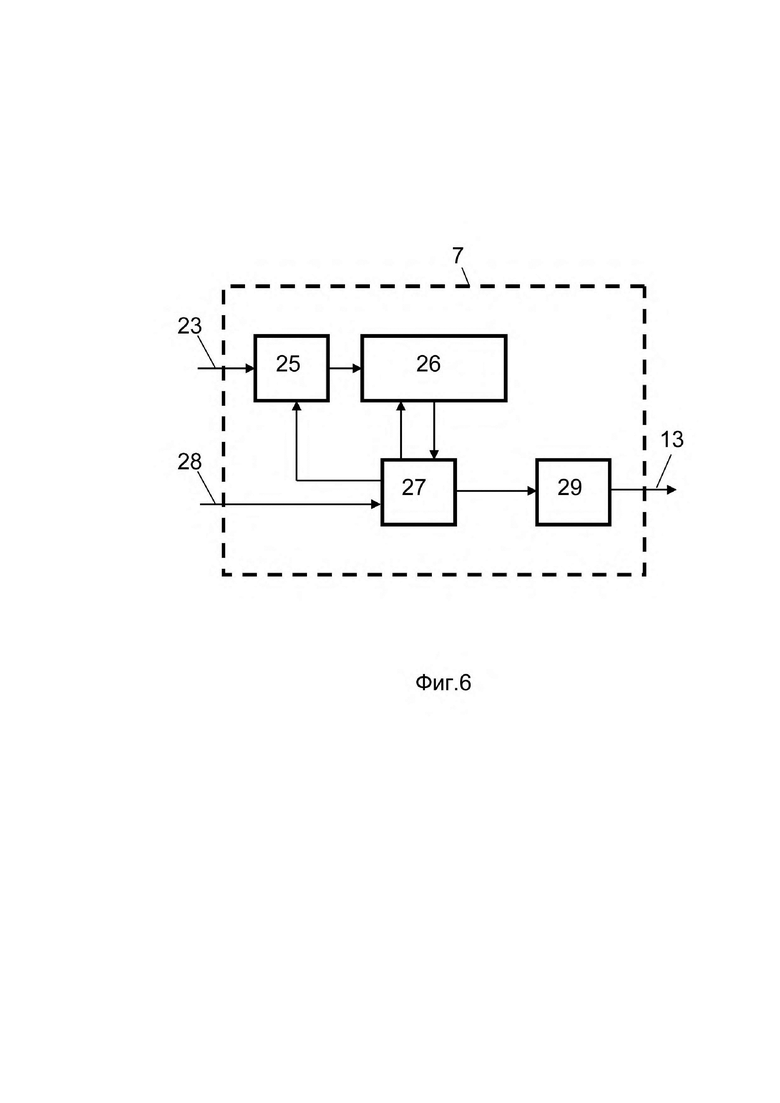
на Фиг. 6 - блок-схема регулятора задержки;
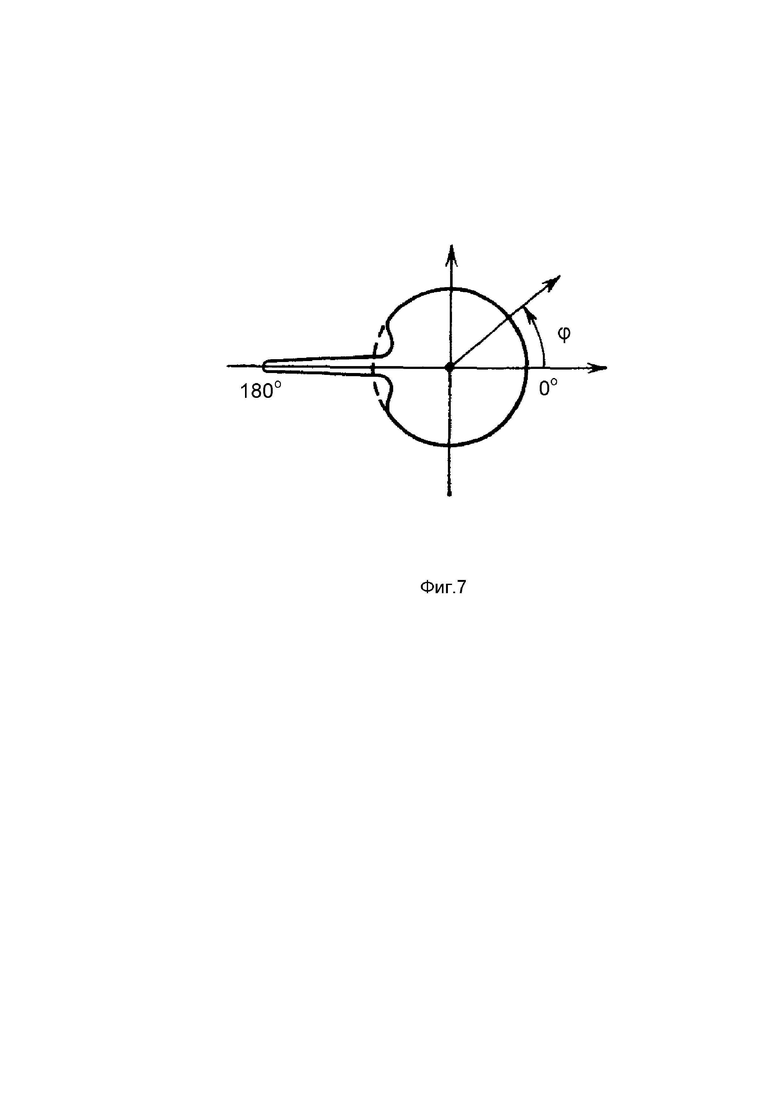
на Фиг. 7 - иллюстрация процесса обратного рассеяния света, отраженного от аэрозольных образований атмосферы.
Лидар для зондирования плотных аэрозольных образований атмосферы содержит оптический узел 1 и устройство синхронизации излучения лазера и регистрации светового луча обратного рассеяния, отраженного от аэрозольных образований атмосферы. Оптический узел 1 включает импульсный лазер 2, фотоприемник 3 с узкополосным оптическим фильтром 4 на входе и полупрозрачное зеркало 5, расположенное под углом 45° к оптической оси фотоприемника 3, при этом оптическая ось фотоприемника 3 совпадает с направлением излучения лазера 2. Устройство синхронизации излучения лазера и регистрации светового луча обратного рассеяния содержит синхронизирующий генератор 6, регулятор 7 задержки и ключевое устройство 8, узкополосный фильтр 9 и пороговое устройство 10. Опционально к генератору 6 и регулятору 7 задержки может быть подключен пульт 17 оператора.
Первый выход генератора 6 подключен к входу лазера 2, а его второй выход подключен к входу регулятора 7 задержки, выход которого подключен к управляющему входу ключевого устройства 8. Выход фотоприемника 3 подключен к информационному входу ключевого устройства 8, выход которого через узкополосный фильтр 9 подключен к входу порогового устройства 10, выход которого является выходом лидара.
Генератор 6 выполнен с возможностью формирования на одном выходе, подключенном к входу лазера 2, импульсов 11 с частотой F/2, предназначенных для включения лазера 2, а на втором выходе, подключенном к входу регулятора 7 задержки, импульсов 23 с частотой F, предназначенных для управления регулятором 7 задержки (также называемыми «сигнал 23 частоты F для управления регулятором 7 задержки»).
Лазер 2, работающий в импульсном режиме, и фотоприемник 3 по спектральным характеристикам соответствуют видимому диапазону. Узкополосный оптический фильтр 4 по спектральной характеристике согласован с лазером 2 и подавляет световые помехи других частей спектра. В качестве оптического фильтра 4 может быть использован, в частности, узкополосный интерференционный оптический фильтр (см., например, Тан Тай До, Л.А. Губанова. Интерференционные металлодиэлектрические светофильтры: Научно-технический вестник Санкт-Петербургского государственного университета информационных технологий, механики и оптики, 2011, № 5 (75), – с. 19-22. (https://ntv.ifmo.ru/file/article/849.pdf); Б. А. Усиевич, В. А. Сычугов. Узкополосный оптический фильтр на основе гофрированного одномерного фотонного кристалла: Квантовая электроника, 2002, №6 (32). - с. 531-534).
Фотоприемник 3 предназначен для приема световых лучей обратного рассеяния и преобразования их в электрические сигналы 12.
Регулятор 7 задержки предназначен для задержки формирования разрешающих импульсов 13 стробирования (также называемых «сигнал 13 стробирования») для пропускания сигналов 12 с выхода фотоприемника 3 относительно времени излучения лазера 2. Время задержки регулируется в пределах от 5 до 30 мкс.
Ключевое устройство 8 предназначено для пропускания с фотоприемника 3 сигнала 12 при условии наличия разрешающего сигнала 13 на управляющем входе. Ключевое устройство 8 представляет собой коммутатор аналогового сигнала, пропускающий сигнал 12 с выхода фотоприемника 3 на выход ключевого устройства 8 (сигнал 14) только во время существования сигнала 13 на его управляющем входе.
Электрический узкополосный фильтр 9 выполнен в виде селективного полосового активного RC-фильтра и имеет максимальное пропускание с выхода ключевого устройства 8 сигнала 14 на частоте F/2 (сигнал 15). Схемотехническая реализация таких фильтров подробно описана (см. Титце У., Шенк К. Полупроводниковая схемотехника. М., 2008, том 1. - 832 с). Там же описана реализация ограничителей аналогового сигнала, которым, по существу, является пороговое устройство 10, формирующее сигнал 16 в том случае, если сигнал 15 по амплитуде превысит заданный порог (порог может быть задан оператором), что произойдет при сокращении расстояния R до границы зоны видимости. Пороговое устройство 10 имеет порог срабатывания, связанный с определенным значением амплитуды гармонического сигнала 15 на его входе.
Сигнал для включения и выключения генератора 6, а также для управления регулятором 7 задержки может формироваться программно или, при наличии пульта 17 оператора, с пульта 17.
В лидаре могут быть использованы наборы стандартных схемотехнических элементов, или генератор 6 и регулятор 7 задержки могут быть построены по приведенным ниже схемам.
Генератор 6 содержит первый источник 18 тактовых импульсов, первый двоичный счетчик 19, первый дешифратор 20, первый и второй мультивибраторы 21 и 22 соответственно. Время включения первого источника 18 тактовых импульсов может формироваться программно, а может осуществляться по сигналу 24 от пульта 17 оператора. Первый источник 18 тактовых импульсов вырабатывает тактовые импульсы с частотой, в четное число раз превышающей частоту F. Выход источника 18 подключен к входу первого двоичного счетчика 19, первый выход которого подключен к входу первого мультивибратора 21 для формирования на его выходе, подключенном к входу лазера 2, импульсов 11 с частотой F/2, а второй выход которого через первый дешифратор 20 подключен к входу второго мультивибратора 22 для формирования на его выходе, подключенном к входу регулятора 7 задержки и являющимся выходом генератора 6, и импульсов 23 с частотой F.
Емкость первого двоичного счетчика 19 выбрана с тем условием, что сигнал переполнения на его выходе, соединенном с входом первого мультивибратора 21, формируется с частотой F/2. Первый дешифратор 20 подключен к выходам разрядов двоичного счетчика 19 таким образом, что сигнал на выходе первого дешифратора 20, соединенного с входом второго мультивибратора 22, формируется вдвое чаще сигнала переполнения счетчика, т.е. с частотой F. Первый мультивибратор 21 имеет длительность вырабатываемого импульса 11, минимально достаточную для создания световой вспышки лазером 2 или иным импульсным источником света. Второй мультивибратор 22 имеет длительность вырабатываемого импульса 23, минимально достаточную для срабатывания логической микросхемотехники в регуляторе 7 задержки, в частности, 3-5 мкс.
Регулятор 7 задержки содержит второй источник 25 тактовых импульсов, второй двоичный счетчик 26, второй дешифратор 27 и третий мультивибратор 29. Первый вход источника 25 подключен к выходу генератора 6, формирующего импульсы 23 с частотой F, а выход источника 25 подключен к первому входу второго двоичного счетчика 26, выход которого через первый вход и первый выход второго дешифратора 27 подключен к второму входу второго источника 25 тактовых импульсов, при этом второй выход второго дешифратора 27 подключен к второму входу двоичного счетчика 26, а третий выход второго дешифратора 27 подключен к входу третьего мультивибратора 29, выход которого является выходом регулятора 7 задержки и подключен к управляющему входу ключевого устройства 8 (сигнал 13).
Второй источник 25 тактовых импульсов включается по сигналу 23 от генератора 6 и вырабатывает тактовые импульсы с частотой f, определяемой условием:
f >ΔR/c, где:
ΔR - абсолютное значение допустимой погрешности определения расстояния от судна до границы зоны ограниченной видимости;
c - скорость света.
Второй источник 25 тактовых импульсов способен также выключаться по сигналу от второго дешифратора 27.
Второй двоичный счетчик 26, кроме первого входа, подключенного к выходу источника 25 тактовых импульсов, имеет второй вход сброса показаний, подключенный к второму выходу второго дешифратора 27. Емкость второго двоичного счетчика 26 выбрана с тем условием, что он может работать в течение времени до 30 мкс, что соответствует максимально возможному значению требуемой величины задержки сигнала в регуляторе 7 задержки.
Второй дешифратор 27 связан с пультом 17 оператора для получения информации о требуемой величине задержки T2. Третий мультивибратор 29 формирует импульс 13 стробирования, длительность Т3 которого, приблизительно, совпадает с длительностью сигнала 12 на выходе фотоприемника 3, соответствующего принятому световому лучу обратного рассеяния, созданному лазером 2 и отраженному от границы зоны ограниченной видимости.
Лидар для зондирования плотных аэрозольных образований атмосферы работает следующим образом.
Лидар располагают, например, на палубе судна или иного транспортного средства, в точке, которая находится достаточно высоко и с позиции которой имеется хороший обзор области пространства по ходу движения (см. Фиг. 4).
В заранее заданное время или по команде с пульта 17 оператора включают первый источник 18 тактовых импульсов в составе генератора 6, формирующего импульсы 11 и 23 двух частот - F/2 и F, соответственно. Выбор величины рабочей частоты F осуществляют, вводя граничное условие. Учитывая скорость движения морского транспорта и скорость изменения метеорологической обстановки над водной поверхностью, смена информации о расстоянии до границы зоны видимости может происходить, как минимум, с частотой 1 Гц. Учитывается также, что уменьшение частоты F увеличивает срок службы импульсного лазера.
Первый двоичный счетчик 19 пересчитывает тактовые импульсы, и при каждом переполнении емкости счетчика 19, происходящем с частотой F/2, счетчик 19 включает первый мультивибратор 21, вырабатывающий управляющий импульс 11 для формирования лазером 2 светового импульса. Сигнал 23 с частотой F формируется вторым мультивибратором 22 по команде от первого дешифратора 20, соединенного с предпоследним разрядом счетчика 19, чем обусловлена вдвое более высокая частота F полученного сигнала 23.
Электрические импульсы 11, поступающие от генератора 6 к лазеру 2, инициируют в нем зондирующие световые импульсы, которые излучаются вперед по ходу движения судна в сторону предполагаемой границы зоны ограниченной видимости (Фиг. 3 и Фиг. 4). При попадании в область неоднородности в атмосфере, т.е. у границы зоны ограниченной видимости, часть световой энергии отражается в обратном направлении и, минуя полупрозрачное зеркало 5 и оптический фильтр 4, улавливается фотоприемником 3, где преобразуется в электрический сигнал 12. Рассеяние света неоднородностями атмосферы происходит во всех направлениях, однако, благодаря, так называемому, «эффекту усиления обратного рассеяния», интенсивность рассеяния в обратном направлении, т.е. к источнику светового излучения, значительно превышает рассеяние в других направлениях, что показано на диаграмме рассеяния в полярных координатах на Фиг. 7 (см. Виноградов А. Г., Гурвич А. С., Кашкаров С.С., Кравцов Ю. А., Татарский В. И. Эффект усиления обратного рассеяния: УФН, 1987 (152), – с. 707-709).
Принятый сигнал 12 на выходе фотоприемника 3 задержан во времени относительно зондирующих импульсов 11 на время T1 (Фиг. 3), что обусловлено временем пролета светового импульса, излученного лазером 2, до границы зоны ограниченной видимости и обратно. Так, например, для обнаружения границы зоны ограниченной видимости на расстоянии в две морские мили, что предписывается Правилами судовождения (см., например, МППСС - 1972. Международные правила предупреждения столкновений судов в море, 1972: Моркнига, 2011, издание 5. - с 156. https://www.mchs.gov.ru/ dokumenty/normativnye-pravovye-akty-ministerstv-i-vedomstv/854) и составляет, приблизительно, 3,6 км, зондирующий световой луч должен дважды пройти расстояние R (Фиг. 4) за время T1 = 24 мкс.
Регулятор 7 задержки задерживает поступающие от генератора 6 стробирующие импульсы 23 частоты F на время T2. Время задержки может быть отрегулировано в пределах от 5 до 30 мкс.
Формирование времени задержки T2 в регуляторе 7 задержки происходит следующим образом: входной сигнал 23 включает работу второго источника 25 тактовых импульсов. Импульсы пересчитываются вторым двоичным счетчиком 26, код состояний всех разрядов которого постоянно анализируется вторым дешифратором 27, в который записан дешифрируемый код. Код может быть изменен по сигналу 28 от пульта 17 оператора. После пересчета определенного количества импульсов второй дешифратор 27 фиксирует совпадение состояния счетчика 26 с записанным кодом, выключает работу второго источника 25 тактовых импульсов, сбрасывает счетчик и включает третий мультивибратор 29, формирующий сигнал 13, передний фронт которого задержан на время T2 относительно переднего фронта сигнала 23 на входе регулятора 7 задержки.
В результате стробирования импульсами 13 ключевое устройство 8 фиксирует участки сигнала 12 попеременно - с наличием и с отсутствием результатов приема зондирующего импульса от лазера 2 фотоприемником 3 (временная диаграмма сигнала 14 на Фиг. 3). Узкополосный фильтр 9 выделяет из сигнала 14 гармоническую составляющую частоты F/2, появление которой возможно лишь в случае приема фотоприемником 3 зондирующих световых импульсов от лазера 2, следующих с частотой F/2. Пороговое устройство 10 при появлении на его входе гармонической составляющей 15 частоты F/2 и при достижении ее амплитудой заранее заданного порога вырабатывает сигнал 16, оповещающий оператора о приближении к границе зоны ограниченной видимости.
На практике, однако, бывает необходимо отследить приближение к границе зоны ограниченной видимости на расстояние, отличное от величины 3,6 км.
Расстояние R до границы зоны ограниченной видимости, при фиксации которого вырабатывается сигнал 16, определяется настройкой регулятора 7 задержки, осуществляемой по сигналу 28 от пульта 17 оператора путем установки во втором дешифраторе 27 необходимого кода для остановки работы второго счетчика 26 и формирования переднего фронта сигнала 13.
Частота работы второго источника 25 тактовых импульсов выбирается, как компромисс между двумя потребительскими характеристиками предлагаемого устройства, а именно: увеличение указанной частоты позволит увеличить дискретность установки времени задержки T2 и, следовательно, увеличить точность установки оператором расстояния R от судна до границы зоны видимости, по достижении которого формируется предупреждающий сигнал 16. С другой стороны, увеличение частоты F приведет к расширению разрядности второго двоичного счетчика 26 и второго дешифратора 27, что увеличивает стоимость лидара.
Для реализации изобретения используются обычные конструкционные материалы и оборудование, что обусловливает, по мнению заявителя, соответствие заявленного изобретения условию патентоспособности «Промышленная применимость».
Перечень позиций элементов, представленных на чертежах
1 - оптический узел
2 - лазер
3 - фотоприемник
4 - оптический фильтр
5 - полупрозрачное зеркало
6 - генератор
7 - регулятор задержки
8 - ключевое устройство
9 - узкополосный фильтр
10 - пороговое устройство
11 - импульсы запуска лазера
12 - сигнал на выходе фотоприемника
13 - сигнал стробирования
14 - сигнал после ключевого устройства
15 - гармонический сигнал частоты F/2 на выходе узкополосного
фильтра 9
16 - предупреждающий тревожный сигнал
17 - пульт оператора
18 - первый источник тактовых импульсов
19 - первый двоичный счетчик
20 - первый дешифратор
21 - первый мультивибратор
22 - второй мультивибратор
23 - сигнал частоты F для управления регулятором 7 задержки
24 - сигнал с пульта 17 для включения генератора 6
25 - второй источник тактовых импульсов
26 - второй двоичный счетчик
27 - второй дешифратор
28 - сигнал с пульта на изменение времени задержки T2
29 - третий мультивибратор
Т1 - ожидаемое время пролета светового импульса от лазера до
границы зоны ограниченной видимости и обратно до фотоприемника
Т2 - время задержки для формирования переднего фронта
принимаемого светового луча относительно импульса запуска лазера
Т3 - длительность импульса 13 стробирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и лидарная система для оперативного обнаружения турбулентности в ясном небе с борта воздушного судна | 2023 |
|
RU2798694C1 |
| ЛИДАРНЫЙ КОМПЛЕКС КОНТРОЛЯ ЗАГРЯЗНЕНИЯ ВОЗДУХА | 1991 |
|
RU2022251C1 |
| ПРИБОР ДЛЯ СТАТИСТИЧЕСКОГО ИССЛЕДОВАНИЯ РАСПРЕДЕЛЕНИЯ ЭНЕРГИИ БЛИКОВЫХ ПЕРЕОТРАЖЕНИЙ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ОТ МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2422853C1 |
| УСТРОЙСТВО ЛАЗЕРНОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 1996 |
|
RU2120648C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2017 |
|
RU2653558C9 |
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2551700C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕРФЕРЕНЦИОННОГО СИГНАЛА В ДОПЛЕРОВСКИХ ЛИДАРАХ | 2010 |
|
RU2434247C1 |
| Способ и лидарная система для обнаружения ориентированных ледяных кристаллов в атмосфере | 2023 |
|
RU2813096C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ МНОГОЛУЧЕВЫХ РАДИОСИГНАЛОВ | 1992 |
|
RU2042195C1 |
| Акустооптический частотомер | 1988 |
|
SU1626092A1 |
Изобретение относится к оптическим устройствам зондирования атмосферы и может быть использовано для зондирования плотных аэрозольных образований атмосферы. Сущность: лидар содержит оптический узел (1), устройство синхронизации излучения лазера, узкополосный фильтр (9), пороговое устройство (10), выход которого является выходом лидара, и пульт (17) оператора. Оптический узел (1) содержит лазер (2), фотоприемник (3), узкополосный оптический фильтр (4) и полупрозрачное зеркало (5), расположенное под углом 45° к оптической оси фотоприемника. При этом оптическая ось фотоприемника (3) совпадает с направлением излучения лазера (2). Устройство синхронизации содержит синхронизирующий генератор (6), регулятор (7) задержки и ключевое устройство (8). Причем генератор (6) выполнен с возможностью формирования на одном выходе, подключенном к входу лазера (2), импульсов (11) с частотой F/2, а на втором выходе, подключенном к входу регулятора (7) задержки, импульсов (23) с частотой F. Технический результат: повышение помехоустойчивости лидара. 4 з.п. ф-лы, 7 ил.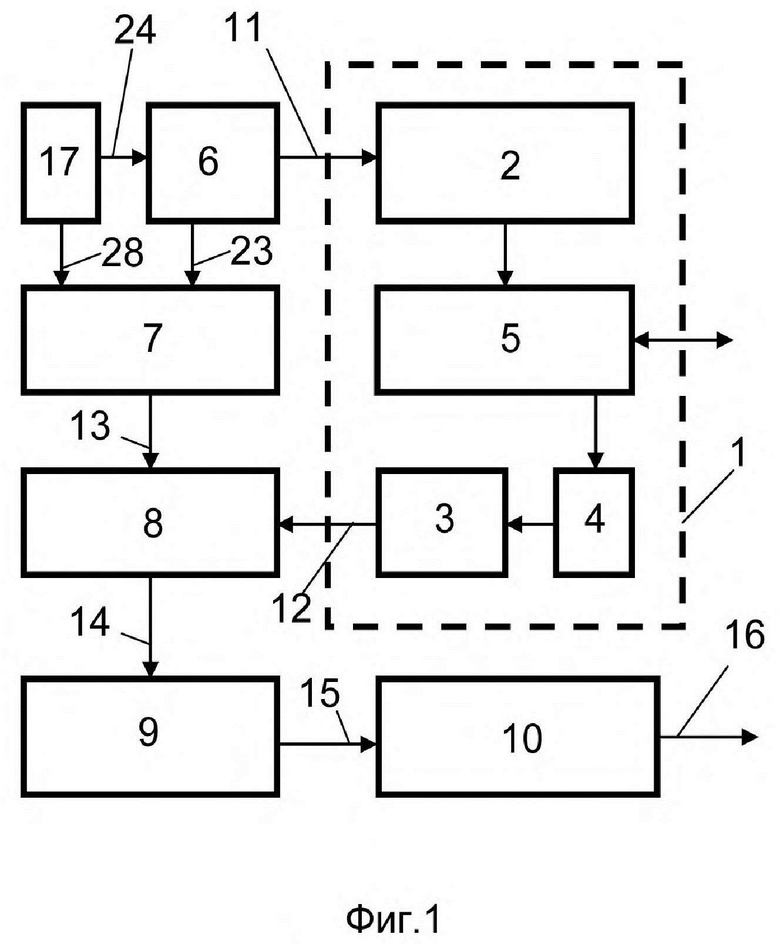
1. Лидар для зондирования плотных аэрозольных образований атмосферы, содержащий оптический узел (1), включающий лазер (2), фотоприемник (3) и полупрозрачное зеркало (5), расположенное под углом 45° к оптической оси фотоприемника, а также подключенное к лазеру и фотоприемнику устройство синхронизации излучения лазера и регистрации светового луча обратного рассеяния, отраженного от аэрозольных образований атмосферы, при этом оптическая ось фотоприемника (3) совпадает с направлением излучения лазера (2), отличающийся тем, что на пути принятого светового луча обратного рассеяния перед фотоприемником (3) установлен узкополосный фильтр (4), при этом устройство синхронизации содержит синхронизирующий генератор (6), регулятор (7) задержки и ключевое устройство (8), причем генератор (6) выполнен с возможностью формирования на одном выходе, подключенном к входу лазера (2), импульсов (11) с частотой F/2, а на втором выходе, подключенном к входу регулятора (7) задержки, импульсов (23) с частотой F, при этом выход регулятора (7) задержки подключен к управляющему входу ключевого устройства (8), к информационному входу которого подключен выход фотоприемника (3), а выход ключевого устройства (8) через узкополосный фильтр (9) подключен к входу порогового устройства (10), выход которого является выходом лидара, причем лидар содержит пульт (17) оператора, выходы которого подключены к управляющим входам генератора (6) и регулятора (7) задержки.
2. Лидар по п. 1, отличающийся тем, что генератор (6) содержит первый источник (18) тактовых импульсов, выход которого подключен к входу первого двоичного счетчика (19), первый выход которого подключен к входу первого мультивибратора (21) для формирования на его выходе, подключенном к входу лазера (2) импульсов (11) с частотой F/2, а второй выход которого через первый дешифратор (20) подключен к входу второго мультивибратора (22) для формирования на его выходе, подключенном к входу регулятора (7) задержки, импульсов (23) с частотой F.
3. Лидар по п. 1, отличающийся тем, что регулятор (7) задержки содержит второй источник (25) тактовых импульсов, первый вход которого подключен к выходу генератора (6), формирующего импульсы (23) с частотой F, а выход источника (25) тактовых импульсов подключен к первому входу второго двоичного счетчика (26), выход которого через первый выход второго дешифратора (27) подключен ко второму входу второго источника (25) тактовых импульсов, при этом второй выход второго дешифратора (27) подключен ко второму входу двоичного счетчика (26), а третий выход второго дешифратора (27) подключен к входу третьего мультивибратора, выход которого подключен к управляющему входу ключевого устройства (8).
4. Лидар по п. 2, отличающийся тем, что управляющий вход первого источника (18) тактовых импульсов подключен к выходу пульта (17) оператора.
5. Лидар по п. 3, отличающийся тем, что управляющий вход второго источника (25) тактовых импульсов подключен к выходу пульта (17) оператора.
| 0 |
|
SU155857A1 | |
| РАСХОДОМЕР ТУРБИННОГО ТИПА | 0 |
|
SU161516A1 |
| ЛИДАР ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ АТМОСФЕРЫ (ВАРИАНТЫ) | 2006 |
|
RU2335786C1 |
