Настоящим документом заявляется приоритет над европейской заявкой № 19182436.6, зарегистрированной 25 июня 2019 г., полное описание которой включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к хвостовому винту для вертолета.
УРОВЕНЬ ТЕХНИКИ
Известно, что в основном вертолеты содержат фюзеляж, несущий винт, расположенный в верхней части фюзеляжа и вращающийся вокруг своей оси, и хвостовой винт, расположенный в задней части фюзеляжа и предотвращающий его закручивание.
Вертолеты также содержат, в известном порядке, один или более силовых агрегатов, например, турбин, и блок трансмиссии, расположенный между турбиной и несущим винтом и предназначенный для передачи движущей силы от турбин к несущему винту.
Более подробно, хвостовой винт, в свою очередь, в основном содержит:
- вал, который может вращаться вокруг первой оси;
- втулку, которая может вращаться вокруг первой оси, и
- группу шарнирно закрепленных одним концом на упомянутой втулке лопастей, каждая из которых лежит на своей второй оси, перпендикулярной упомянутой первой оси.
Вал хвостового винта приводится во вращение набором шестерен, приводимых в движение главным блоком трансмиссии.
Лопасти хвостового винта ротора вращаются вместе с валом вокруг первой оси и могут по желанию поворачиваться вокруг второй оси для изменения соответствующих углов атаки и, следовательно, тяги хвостового винта.
Для управления углами атаки соответствующих лопастей хвостовые винты содержат:
- тягу, механически или электромеханически функционально связанную с управляемой пилотом педалью и скользящую внутри вала вдоль первой оси, но зафиксированную под углом относительно первой оси;
- элемент управления, также известный как «паук», который может вращаться заодно с валом вокруг первой оси и имеет группу «лап» или рычагов, соединенных каждая со своей лопастью наклонно по отношению к ее второй оси;
и
- подшипник качения, установленный с возможностью скольжения вдоль первой оси между тягой и элементом управления и способный передавать осевую нагрузку от тяги к вращающемуся элементу.
Боле конкретно, подшипник качения, в свою очередь, содержит:
- наружное кольцо, закрепленное на элементе управления;
- внутреннее кольцо, прикрепленное к тяге управления; и
- группу тел качения, которые катятся по соответствующим дорожкам, образованным внутренним и наружным кольцами.
В нормальном рабочем состоянии подшипника тела качения допускают вращение наружного кольца по отношению к внутреннему кольцу и соответственно вращение элемента управления относительно тяги.
При нажатии на педаль тяга управления скользит параллельно первой оси. Это продольное движение вызывает через подшипник качения скольжение элемента управления параллельно первой оси по заданной траектории.
В результате этого скольжения лопасти поворачиваются вокруг своих вторых осей с изменением соответствующих углов атаки на одну и ту же величину, связанную с заданной траекторией.
Как следует из изложенного, возможный выход из строя подшипника качения может привести к риску того, что хвостовой винт станет фактически неуправляемым, что создаст опасную ситуацию для вертолета.
В частности, неисправность первого рода может произойти в случае повреждения тел качения и/или дорожек внутреннего или наружного кольца, например, из-за случайного попадания инородных тел внутрь подшипника, потери консистентной смазки, повреждения дорожек или поверхностей тел качения.
В таком состоянии подшипник качения вместо того, чтобы обеспечивать вращение элемента управления относительно тяги управления, начинает постепенно «заедать», и в нем возникает непредусмотренный тормозящий момент силы между внутренним и наружным кольцами, постепенно нарастающий с течением времени.
Этот тормозящий момент будет передаваться на тягу управления, создавая риск ее повреждения.
В данной области техники существует необходимость снижения риска необратимого повреждения тяги управления повреждения тормозящими моментами при возникновении неисправности первого рода.
Неисправность второго рода может возникнуть в случае разрушения тел качения с последующим отрывом внутреннего кольца от тел качения. В этом случае подшипник больше не сможет скользить вдоль первой оси, и тяга больше не сможет сдвигать элемент управления.
В данной области техники существует необходимость своевременного обнаружения неисправного состояния подшипника качения, чтобы пилот мог быстро приземлиться до того, как вертолет станет полностью неуправляемым.
В данной области техники существует также необходимость обеспечения достаточной управляемости хвостового винта даже в случае выхода из строя подшипника качения.
Хвостовой винт вертолета, в соответствии с ограничительной частью пункта 1 формулы настоящего изобретения, описан в US-B-9,359,073.
Более подробно, US-B-9,359,073 описывает хвостовой винт, содержащий вал, тягу и последовательно расположенные первый и второй подшипники.
Первый подшипник содержит первое кольцо, вращающееся вместе с валом, и второе кольцо.
Второй подшипник содержи третье кольцо и четвертое кольцо.
Третье кольцо второго подшипника и первое кольцо первого подшипника жестко соединены друг с другом без возможности поворота.
Хвостовой винт также содержит стопорное устройство, расположенное между третьим и четвертым кольцами и предназначенное для блокирования вращения третьего кольца относительно четвертого кольца. Это стопорное устройство содержит элемент, который ломается в случае выхода из строя первого подшипника и не ломается в случае правильной работы первого подшипника.
Техническое решение, представленное в US-B-9,359,073, является особенно сложным, поскольку оно требует использования стопорного устройства и соединения третьего кольца второго подшипника с первым кольцом первого подшипника.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание хвостового винта, который позволил бы удовлетворить хотя бы одну из вышеупомянутых потребностей простым и недорогим способом.
Указанная задача достигается настоящим изобретением в той мере, в которой оно соответствует хвостовому винту, определенному в пункте 1 формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения ниже приведен предпочтительный вариант осуществления исключительно в качестве неограничивающего примера и со ссылкой на прилагаемые чертежи, на которых:
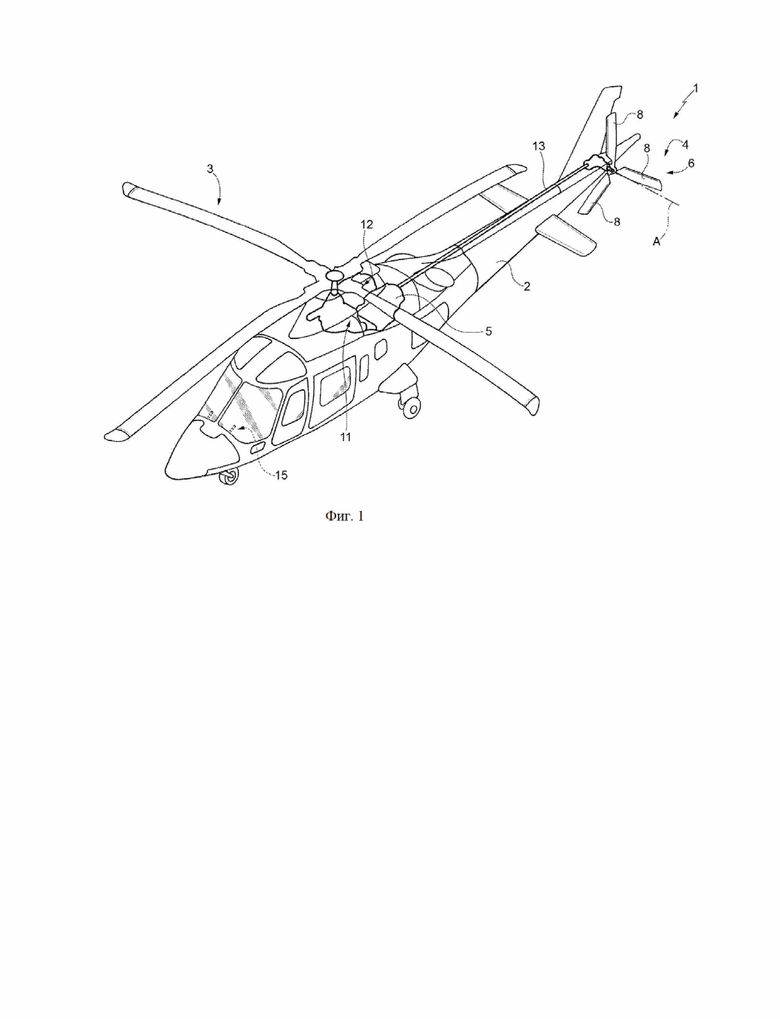
- Фиг. 1 показывает вид в перспективе вертолета, содержащего хвостовой винт по настоящему изобретению;
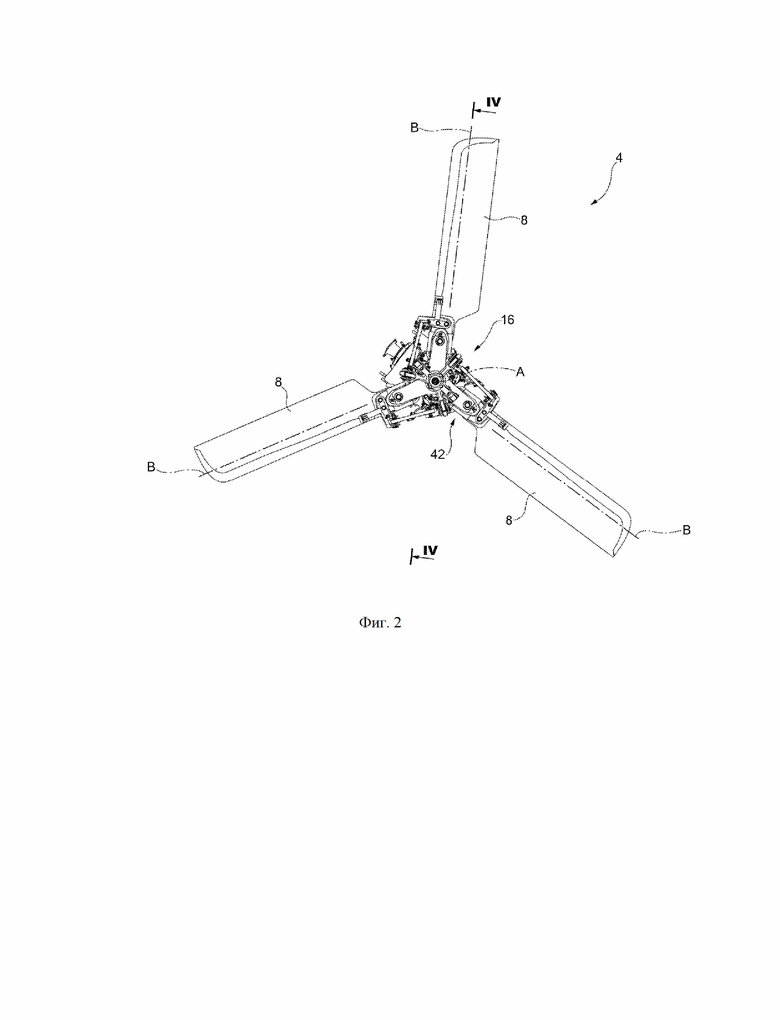
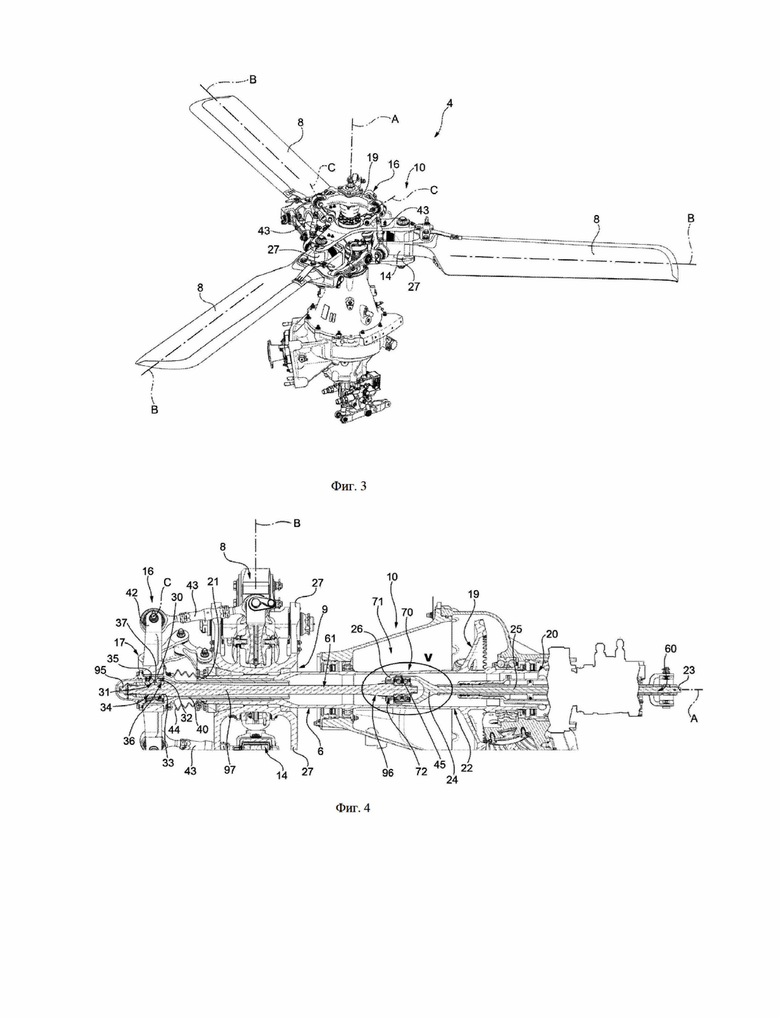
- Фиг. 2 и 3 представляют соответственно вид сверху и вид в перспективе хвостового винта, показанного на фиг. 1;
- Фиг. 4 дает разрез по линии IV-IV хвостового винта на фиг. 2; и
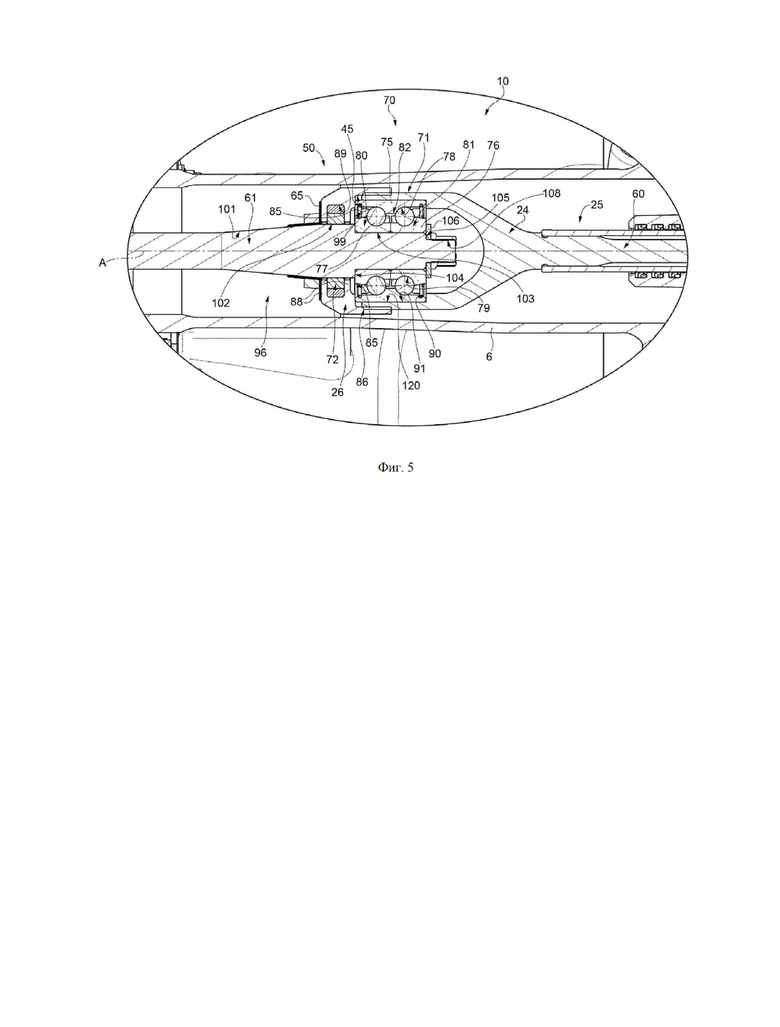
- Фиг. 5 воспроизводит определенные детали на фиг. 4 в увеличенном масштабе.
ЛУЧШИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Как показано на фиг.1, ссылочной позицией 1 обозначен вертолет, в основном содержащий:
- фюзеляж 2;
- одну или более турбин 5;
- несущий винт 3, расположенный в верхней части фюзеляжа 2 и способный вращаться вокруг оси A; и
- хвостовой винт 4, расположенный в задней части фюзеляжа 2 и способный вращаться вокруг своей оси, перпендикулярной оси A.
Вертолет 1 также содержит блок 11 трансмиссии, который передает движущую силу от турбин 5 к несущему винту 3.
В свою очередь, блок 11 трансмиссии содержит:
- зубчатую передачу 12, передающую движущую силу от турбины 5 к несущему винту 3; и
- вал 13, передающий движущую силу от зубчатой передачи 12 к хвостовому винту 4.
Несущий винт 3 имеет известную конструкцию с регулируемой тягой, которая обеспечивает вертикальный отрыв вертолета 1 от земли и его полет вперед по горизонтали.
Хвостовой винт 4 создает боковую тягу, которая компенсирует крутящий момент, создаваемый несущим винтом на фюзеляже 2.
Этот компенсирующий крутящий момент направлен против крутящего момента, создаваемого несущим винтом 3.
Следовательно, регулируя величину тяги хвостового винта 4, можно задать вертолету 1 любой желаемый угол рыскания или изменять указанный угол рыскания в зависимости от маневра, который требуется выполнить.
Как видно на фиг. 2-5, хвостовой винт 4 в основном содержит:
- вал 6, вращающийся вокруг оси А и функционально связанный известным образом с валом 13;
- группу (в данном случае три) закрепленных одним концом лопастей 8, каждая из которых лежит вдоль своей оси В, перпендикулярной оси А, и
- втулку 9, прикрепленную к наружной поверхности участка вала 6, которая может вращаться как одно целое с валом 6 вокруг оси А, и к которой шарнирно прикреплены лопасти 8.
Именно, лопасти 8 шарнирно прикреплены к втулке 9 таким образом, чтобы:
- иметь возможность вращаться как одно целое со втулкой 9 и валом 6 вокруг оси A; и
- иметь возможность одновременно поворачиваться вокруг своих осей B на один и тот же угол для изменения соответствующих углов атаки.
В частности, от втулки 9 отходит в радиальном относительно оси А направлении группу соединительных элементов 27 для связи с соответствующими лопастями 8. Каждая лопасть 8 имеет комлевую часть 14, расположенную радиально ближе к оси А и шарнирно связанную с соответствующим соединительным элементом 27 втулки 9.
Для изменения вышеупомянутых углов атаки хвостовой винт 4 также содержит:
- орган 15 управления полетом (схематично показанный только на фиг. 1), приводимый в действие пилотом, например, педаль;
- механизм 10 управления, скользящий параллельно оси А и механически или электромеханически приводимый в действие органом 15 управления полетом;
- элемент 16, вращающийся как одно целое с валом 6 вокруг оси A и соединенный с лопастями 8 эксцентрично относительно их осей B; и
- подшипник 17, который совместно с механизмом 10 управления может скользить параллельно оси А, радиально расположенный между механизмом 10 управления и элементом 16 и скользящий.
Более конкретно, вал 6 является полым.
Вал 6 также содержит (см. фиг. 4 и 5):
- осевой конец 20;
- осевой конец 21, открытый и противоположный концу 20; и
- основную часть 22 между осевыми концами 20 и 21, на которой установлена втулка 9.
На основной части 22 выполнен также фланец 19, предназначенный для приема движущей силы от вала 13.
Более конкретно, вал 6 имеет максимальный диаметр на фланце 19, который постепенно уменьшается от фланца 19 к концам 20 и 21.
Механизм 10 управления частично размещен внутри вала 6.
Элемент 16, в свою очередь, содержит (фиг. 4):
- трубчатый корпус 40, частично размещенный внутри вала 6 и соединенный с валом 6 с возможностью скольжения вдоль оси A;
- фланец 42, выступающий перпендикулярно оси A из трубчатого корпуса 40 на его конце, удаленном от вала 6; и
- группу рычагов 43, шарнирно закрепленных одним концом на фланце 42 перпендикулярно оси A, а другим концом на соответствующих лопастях 8 эксцентрично относительно соответствующих осей B, и способных поворачиваться вокруг осей C шарниров.
Фланец 42 и подшипник 17 расположены вне вала 6.
Более конкретно, фланец 42 и подшипник 17 расположены на конце, противоположном концу 20 в отношении конца 21
Фланец 42 соединен с валом 6 одной сильфонной муфтой 44, которая может складываться и раскладываться вдоль оси А и защищает часть трубчатого корпуса 40.
Рычаги 43 в общем наклонены относительно оси А и проходят от фланца 42 к концу 20.
Перемещение механизма 10 управления вдоль оси А вызывает перемещение элемента 16 через подшипник 17.
Следуя скольжению элемента 16 вдоль оси A, рычаги 43 изменяют свой наклон относительно оси A на одинаковые между собой углы, вызывая синхронный поворот лопастей 8 вокруг своих осей B на одинаковые между собой углы.
В частности, рычаги 43 шарнирно закреплены на комлевых частях 14 соответствующих лопастей 8.
Подшипник 17 может передавать осевые нагрузки параллельно оси А в обоих направлениях.
Другими словами, подшипник 17 выполнен таким образом, что перемещение механизма 10 вдоль оси А в обоих направлениях вызывает перемещение элемента 16 в тех же направлениях.
Тем самым подшипник 17 образует блок трансмиссии, который соединяет механизм 10 управления с элементом 16 в единое целое в осевом направлении, но при этом с возможностью изменения углов относительно оси A.
Подшипник 17, в свою очередь, содержит:
- наружное кольцо 30, вращающееся как одно целое с элементом 16;
- внутреннее кольцо 31, скользящее как одно целое с механизмом 10; и
- группу тел 32 качения, в данном случае двойное кольцо шариков, катящихся по соответствующим дорожкам 33 и 34, выполненным в соответствующих кольцах 30 и 31.
В показанном случае кольцо 31 имеет пару буртиков 35 и 36 на взаимно противоположных сторонах, выступающих радиально в сторону кольца 30 и ограничивающих соответствующие осевые опорные поверхности тел 32 качения. Тем самым, движение тел 32 качения ограничено в осевом направлении буртиками 35 и 36.
Кроме того, кольцо 31 выполнено в виде двух полуколец, в показанном случае состыкованных друг с другом в осевом направлении.
Кольцо 30 содержит буртик 37, расположенный в осевом направлении между буртиками 35 и 36, радиально выступающий в сторону кольца 31 и ограничивающий соответствующие опорные поверхности тел 32 качения. Буртик 37 расположен в осевом направлении между телами 32 качения в плоскости симметрии подшипника 17 по радиусу относительно оси A.
Кроме того, наружное кольцо 30 закреплено на трубчатом корпусе 40 элемента 16 со стороны, противоположной фланцу 42 по радиусу относительно оси A.
В свою очередь, механизм 10 управления предпочтительно содержит:
- тягу 60, приводимую в действие органом 15 управления полетом; и
- тягу 61, соединенную с подшипником 17.
Хвостовой винт 4 также содержит муфту 70, которая позволяет тягам 60 и 61 скользить вдоль оси А как единое целое в связи друг с другом.
Муфта 70 также предназначена для того, чтобы:
- разрешить вращение тяги 61 относительно тяги 60, когда крутящий момент относительно оси A, создаваемый подшипником 17 на тяге 61, превышает пороговое значение, определяющее неисправность подшипника 17; и
- предотвратить вращение тяги 61 относительно тяги 60, когда крутящий момент, создаваемый подшипником 17 на тяге 61, меньше порогового значения.
Конкретнее, тяга 61 прикреплена к кольцу 31 подшипника 17.
Важно подчеркнуть, что в нормальных условиях эксплуатации подшипник 17 обеспечивает свободное вращение кольца 30 относительно кольца 31 вокруг оси A, то есть элемента 16 относительно тяги 61. Другими словами, подшипник 17 не передает никакого крутящего момента на тягу 61.
Один случай выхода из строя подшипника 17 вызывается постепенным «заеданием» подшипника 17. В таком состоянии кольцо 31 подшипника начинает все сильнее вовлекаться телами 32 качения во вращение вокруг оси A.
Следовательно, в состоянии отказа подшипник 17 создает непредусмотренный тормозящий момент силы на тяге 61.
Более подробно, муфта 70 содержит (фиг. 4 и 5):
- кольцо 72 из материала с высоким коэффициентом трения; и
- подшипник 71 качения, расположенный между тягами 60 и 61.
Кольцо 72 в радиальном направлении расположено между тягами 60 и 61.
Коэффициент трения материала кольца 72 таков, чтобы противостоять крутящему моменту, создаваемому подшипником 17 на тяге 61, если этот крутящий момент меньше порогового значения и фактически еще не опасен для правильной работы тяг 60 и 61.
В этом состоянии муфта 70 удерживает обе тяги 60 и 61 под углом к оси A. В результате обе тяги 60 и 61 окажутся под действием крутящего момента, создаваемого подшипником 17.
Если же крутящий момент, создаваемый подшипником 17 на тяге 61, превысит пороговое значение и, следовательно, станет в значительной мере опасен для правильной работы тяг 60 и 61, трение кольца 72 уже не сможет удерживать его. В результате муфта 70 позволит тяге 61 поворачиваться относительно тяги 60 вокруг оси А как единому целому с вышедшим из строя подшипником 17. В этом состоянии тяга 61 приобретает свободу вращения. Вследствие этого тяги 60 и 61 перестают быть под действием непредусмотренного тормозящего момента силы, создаваемого неисправным подшипником 17 и превышающего пороговое значение.
Более того, подшипник 17, а, следовательно, и элемент 16, остаются соединенными как единое целое с тягами 60 и 61 по отношению к поступательному перемещению вдоль оси А, тем самым сохраняя возможность регулировки угла атаки лопастей 8 даже в условиях отказа подшипника 17.
В показанном случае кольцо 72 выполнено из эластомерного материала.
Подшипник 71, подобно подшипнику 17, может передавать осевые нагрузки параллельно оси А в обоих направлениях.
Другими словами, подшипник 71 устроен так, что перемещение тяги 60 в обоих направлениях под действием элемента 15 управления полетом вызывает соответствующее перемещение тяги 61 в том же направлении.
Подшипник 71, таким образом, соединяет тяги 60 и 61 с возможностью перемещения под углом по отношению к оси A и при этом фиксированного в осевом направлении вдоль оси A.
Подшипник 71, в свою очередь, содержит:
- наружное, если считать по радиусу, кольцо 75, соединенное с тягой 60;
- внутреннее, если считать по радиусу, кольцо 76, соединенное с тягой 61; и
- группу тел 77 качения, в показанном случае двойное кольцо шариков, катящихся по соответствующим дорожкам 78 и 79, выполненным в соответствующих кольцах 75 и 76.
В показанном случае кольцо 76 имеет пару буртиков 80 и 81 на взаимно противоположных сторонах, выступающих радиально в сторону кольца 76 и ограничивающих соответствующие осевые опорные поверхности тел 77 качения. Тела 77 качения, в частности, расположены в осевом направлении между буртиками 80 и 81.
Кроме того, кольцо 76 выполнено в виде двух полуколец, в показанном случае состыкованных друг с другом в осевом направлении.
Кольцо 75 подшипника 71 содержит буртик 82, расположенный в осевом направлении между буртиками 80 и 81, радиально выступающий в сторону кольца 76 и ограничивающий соответствующие опорные поверхности для тел 77 качения. Буртик 82, выступающий в осевом направлении, расположен в осевом направлении между телами качения 77 в плоскости симметрии подшипника 71 по радиусу относительно оси A.
Тяга 60, в свою очередь, содержит:
- основную часть 25, приводимую в действие органом 15 управления полетом; и
- кольцевую часть в виде торцевого кольца 26, расположенного на стороне подшипника 17.
Основная часть 25, в свою очередь, содержит:
- осевой конец 23, противоположный подшипнику 17 и предназначенный для передачи осевого смещения от органа 15 управления полетом и ограничения основной части 23 (фиг. 4); и
- выступ 24 осевого конца, противоположный концу 23 и формирующий полость 45 для приема подшипника 71.
Выступ 24, в свою очередь, содержит:
- поверхность 91 осевой выемки; и
- буртик 90 радиальной выемки с диаметром меньше поверхности 91.
Кольцо 26, в свою очередь, содержит:
- головную часть 85 радиальной выемки на стороне подшипника 17, через которую тяга 61 проходит с радиальным зазором, и
- часть 86 осевого удлинения, выступающую одним концом из части 85 со стороны, обращенной к подшипнику 17, и окружающую выступ 24.
В частности, часть 85 содержит пару разнесенных в осевом направлении консолей 88, образующих между собой кольцевое гнездо 89.
Выступ 24 и часть 86 тяги 60 предпочтительно имеют резьбовое соединение друг с другом.
Тяга 61, в свою очередь, содержит:
- конец 95, расположенный вне вала 6 и ограничивающий в осевом направлении тягу 61 со стороны подшипника 17;
- конец 96, противоположный концу 95, расположенный внутри выступа 24 и кольца 26, и
- основную часть 97, которая находится между концами 95 и 96.
В частности, основная часть 97 частично размещена внутри вала 6.
В частности, конец 96 содержит:
- сегмент 101 в форме усеченного конуса, сужающийся к концу 95, через который часть 85 проходит с зазором;
- цилиндрический сегмент 102 с диаметром большим, чем диаметр сегмента 101;
- цилиндрический сегмент 103 с диаметром меньшим, чем диаметр сегмента 102; и
- цилиндрический сегмент 108 с диаметром меньшим, чем диаметр сегмента 103.
Конец 96 дополнительно содержит:
- радиальный буртик 104, расположенный между сегментами 102 и 103; и
- радиальный буртик 105, расположенный между сегментами 103 и 108.
Подшипник 71 вставлен в гнездо 120, ограниченное в осевом направлении выступом 24 и кольцом 26 тяги 60, а в радиальном направлении – концом 96 тяги 61 и выступом 24 тяги 60.
Кольцо 75 подшипника 71 зафиксировано в осевом направлении между буртиком 90, образованным выступом 24 и противостоящим в осевом направлении кольцу 26, и частью 85 кольца 26.
Кроме того, кольцо 75 прикреплено к поверхности 91 осевой выемки в выступе 24 и имеет диаметр, больший диаметра буртика 90.
Более подробно, кольцо 76 зафиксировано в осевом направлении между буртиком 104 и стопорным элементом 106, закрепленным на буртике 105 на стороне, противоположной в осевом направлении буртику 104.
Кроме того, в радиальном направлении кольцо 76 зафиксировано сегментом 103 тяги 61.
Основные части 25 и 97 соответствующих тяг 60 и 61 по меньшей мере частично находятся внутри вала 6.
В показанном случае в сегменте 102 выполнено кольцевое гнездо 89, образующее часть посадочного места.
В гнездо 89 посажено кольцо 72.
Снаружи вала 6 расположены фланец 42 и подшипник 17, которые окружают также часть тяги 61.
Хвостовой винт 4 дополнительно содержит датчик 50, предназначенный для генерирования сигнала при отказе подшипника 17, в частности, при превышении крутящим моментом, создаваемым подшипником 17 на тяге 61, порогового значения.
В частности, датчик 50 содержит элемент 65, расположенный между тягами 60 и 61 и разрушающийся при повороте тяги 61 относительно тяги 60, когда крутящий момент, создаваемый подшипником 17 на тяге 61, превышает пороговое значение.
В показанном случае элемент 65 находится между кольцом 26 тяги 60 и сегментом 101 тяги 61.
В процессе эксплуатации работа несущего винта 3 создает тягу, которая позволяет удерживать вертолет 1 в воздухе и в то же время двигать вертолет 1 вперед.
Работа несущего винта 3 также создает крутящий момент на фюзеляже 2, который уравновешивается противоположным крутящим моментом, создаваемым тягой хвостового винта 4.
Чтобы управлять углом рыскания вертолета 1, пилот использует орган 15 управления полетом, который позволяет менять шаг лопастей 8 хвостового винта 4 и тем самым тягу, создаваемую хвостовым винтом 4.
Во время работы хвостового винта 4 вал 6 приводится во вращение вокруг оси A валом 13 и увлекает за собой во вращение вокруг оси A втулку 9, элемент 16 и лопасти 8.
Под действием органа 15 управления полетом происходит перемещение механизма 10 управления, образованного тягами 61 и 62, вдоль оси А.
Это перемещение влечет за собой совместное перемещение подшипника 17 и элемента 16 как единого целого вдоль оси A.
В результате элемент 16 перемещается от лопастей 8 (или к ним), что меняет угол наклона рычагов 43 к оси В, тем самым увеличивая (или, соответственно, уменьшая) угол атаки лопастей 8.
Это смещение рычагов 43 вызывает синхронный поворот лопастей 8 на один и тот же угол вокруг своих осей В и результирующее изменение углов атаки лопастей 8.
Ниже описана работа хвостового винта 4 начиная с состояния, в котором подшипник 17 полностью исправен и не создает тормозящего момента силы на тяге 61 относительно оси A.
В этом состоянии кольцо 30 вращается вокруг оси A как одно целое с элементом 16, в то время как кольцо 31 и тяги 60 и 61 не вращаются вокруг оси A.
В результате, кольца 75 и 76 подшипника 71 не вращаются вокруг оси А, и подшипник 71 остается по существу неактивным.
В случае выхода из строя подшипника 17 тела 32 качения постепенно вовлекают кольцо 31 во вращение и тем самым создают крутящий момент вокруг оси А на тяге 61.
Пока значение этого крутящего момента ниже порогового значения, муфта 70 предотвращает вращение тяги 61 относительно тяги 60, сохраняя подшипник 71 в неактивном состоянии.
В частности, кольцо 72 создает на тяге 61 момент трения, равный крутящему моменту, прилагаемому к ней подшипником 17 на тяге 61, и противоположный по направлению.
Поэтому тяга 61 не может вращаться и испытывает на себе действие крутящего момента, равного тормозящему моменту силы, создаваемому подшипником 17 на тяге 61.
Однако, такой момент силы недостаточен, чтобы повредить тяги 60 и 61.
Механизм 10 управления продолжит успешно регулировать углы атаки лопастей 8, даже когда подшипник 17 частично выйдет из строя.
Последующее постепенное ухудшение состояния подшипника 17 вызовет такое же постепенное увеличение момента силы, создаваемого подшипником 17 на тяге 61. Это будет продолжаться до тех пор, пока не будет превышено пороговое значение.
В условиях полного заклинивания подшипник 17 создает максимальный непредусмотренный тормозящий момент силы на тяге 61.
Но как только величина крутящего момента, создаваемого на тяге 61 подшипником 17, достигнет порогового значения, муфта 70 позволит тяге 61 поворачиваться относительно тяги 60, которая останется фиксированной под некоторым углом к оси A.
Это происходит потому, что кольцо 72 не может приложить к тяге 61 крутящий момент, превышающий пороговое значение, т.е. равный приложенному крутящему моменту.
Поворот тяги 61 относительно тяги 60 вокруг оси A будет обеспечиваться подшипником 71. Конкретно, этот поворот будет обеспечиваться вращением кольца 76 как одного целого с тягой 61 относительно кольца 75 как одного целого с тягой 60.
Тяга 61 приобретает свободу вращения и не зависит от угла поворота тяги 60.
В этом состоянии действия органа 15 управления полетом по-прежнему вызывают поступательное движение тяг 60 и 61, подшипника 17 и, следовательно, элемента 16 как единого целого, сохраняя тем самым возможность регулировки углов атаки лопастей 8 даже в условиях выхода из строя подшипника 17.
Датчик 50 обнаруживает поворот тяги 61 относительно тяги 60 по разрыву элемента 65 и сообщает экипажу о выходе из строя подшипника 17 и необходимости немедленной посадки.
Преимущества, которые могут быть достигнуты с помощью настоящего изобретения, очевидны из результатов исследования характеристик хвостового винта 4.
В частности, муфта 70 позволяет тягам 60 и 61 скользить вдоль оси А как одно целое друг с другом и обеспечивает вращение тяги 61 относительно тяги 60, когда крутящий момент, прилагаемый к тяге 61 подшипником 17, превышает пороговое значение.
Благодаря этому в случае выхода из строя подшипника 17, что приводит к возникновению большого крутящего момента на тяге 61, риск повреждения тяг 60 и 61 существенно снижается.
В то же время механизм 10 по-прежнему может эффективно перемещаться вдоль оси А и при вышедшем из строя подшипнике 17, продолжая тем самым обеспечивать желаемую регулировку углов атаки лопастей 8.
Максимальная величина крутящего момента, создаваемого подшипником 17 на тяге 61, ограничивается определенным пороговым значением с помощью простого и эффективного способа –фрикционного кольца 72.
В тот момент, когда создаваемый подшипником 17 на тяге 61 крутящий момент превышает пороговое значение, подшипник 71 ограничивает перемещение тяг 60 и 61 в осевом направлении и обеспечивает относительное вращение тяги 61 относительно тяги 60.
Благодаря этому хвостовой винт 4 очень прост в изготовлении и обслуживании по сравнению с известными решениями, упомянутыми во вводной части этого описания.
Датчик 50 обнаруживает, когда крутящий момент, создаваемый на тяге 61 подшипником 17, превышает пороговое значение, по разрушению элемента 65, следующему за относительным вращением тяги 61 относительно тяги 60.
Таким образом, датчик 50 своевременно информирует экипаж о выходе из строя подшипника 17 и о срочной необходимости приземлиться.
Наконец, ясно, что возможны модификации и иные варианты осуществления описанного и показанного здесь хвостового винта 4 без отступления от сути настоящего изобретения, определенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ ВИНТ ДЛЯ ВЕРТОЛЕТА | 2020 |
|
RU2799272C1 |
| РУЛЕВОЙ ВИНТ ДЛЯ ВЕРТОЛЕТА | 2020 |
|
RU2797602C2 |
| РУЛЕВОЙ ВИНТ ДЛЯ ВЕРТОЛЕТА | 2020 |
|
RU2799274C2 |
| ВИНТ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, СПОСОБНОГО К ЗАВИСАНИЮ, И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2017 |
|
RU2733456C1 |
| УСТРОЙСТВО ГАШЕНИЯ ВИБРАЦИЙ ДЛЯ ВЕРТОЛЕТА | 2019 |
|
RU2780246C2 |
| ЗАКЛЮЧЕННЫЙ В ОБТЕКАТЕЛЬ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА И ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2570971C2 |
| ПРИВОДНАЯ СИСТЕМА | 2017 |
|
RU2720760C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ФУНКЦИЕЙ «ЗАВИСАНИЯ» | 2019 |
|
RU2783550C1 |
| ВИНТ ВЕРТОЛЕТА И ВЕРТОЛЕТ, СОДЕРЖАЩИЙ ЭТОТ ВИНТ | 2009 |
|
RU2499734C2 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2013 |
|
RU2648502C2 |
Изобретение относится к области авиации, в частности к конструкциям вертолетов с одним несущим винтом. Хвостовой винт (4) вертолета содержит вал (6), вращающийся вокруг первой оси (A), группу лопастей (8), шарнирно закрепленных на валу (6) и способных вращаться вокруг вторых осей (B), элемент (16) управления, способный скользить вдоль первой оси (A) и вращаться вместе с валом (6), соединенный с лопастями (8) для поворота их вокруг вторых осей (B), механизм (10) управления, способный скользить в осевом направлении с фиксированным углом к валу (6), и соединительный элемент (17), расположенный между механизмом (10) управления и элементом (16) управления и способный скользить в осевом направлении вдоль вала (6) с механизмом (10) управления. Механизм (10) управления содержит первую и вторую тяги (60, 61). Винт (4) содержит муфту (70), которая предназначена для поддерживания или предотвращения вращения второй тяги (61) относительно первой тяги (60), когда крутящий момент относительно первой оси (A), прилагаемый первым соединительным элементом (17) ко второй тяге (61), больше или меньше порогового значения в случае выхода из строя соединительного элемента (17). Обеспечивается возможность своевременного обнаружения неисправного состояния подшипника качения, достаточной управляемости хвостового винта в случае выхода из строя подшипника качения. 2 н. и 13 з.п. ф-лы, 5 ил.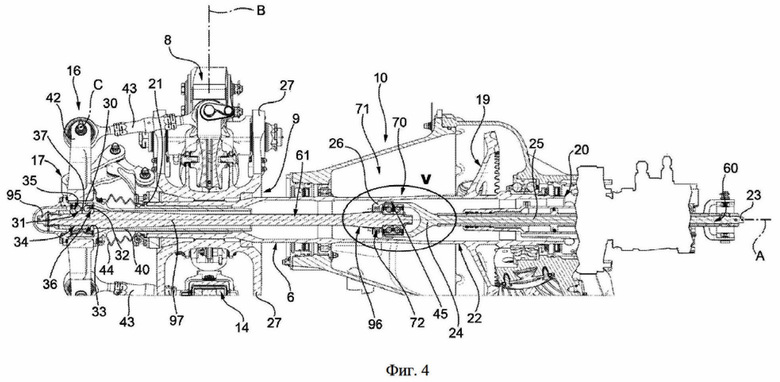
1. Хвостовой винт (4) для вертолета (1), содержащий
вал (6), который выполнен с возможностью вращения вокруг первой оси (А);
группу лопастей (8), шарнирно закрепленных на упомянутом валу (6), лежащих на соответствующих вторых осях (В), перпендикулярных упомянутой первой оси (А) и выполненных с возможностью вращения вокруг соответствующих упомянутых вторых осей (B) для изменения соответствующих углов атаки;
элемент (16) управления, скользящий вдоль упомянутой первой оси (А) относительно упомянутого вала (6), выполненный с возможностью вращения как одно целое с упомянутым валом (6) и функционально связанный с упомянутыми лопастями (8) с возможностью поворота упомянутыми лопасти (8) вокруг соответствующих упомянутых вторых осей (B) при перемещении упомянутого элемента (16) вдоль упомянутой первой оси (A);
механизм (10) управления, скользящий в осевом направлении вдоль упомянутой первой оси (А) относительно упомянутого вала (6) и наклоненный под фиксированным углом по отношению к упомянутой первой оси (А); и
соединительный элемент (17), расположенный между упомянутым механизмом (10) управления и упомянутым элементом (16) управления, скользящий вдоль упомянутой первой оси (A) относительно упомянутого вала (6) и составляющий одно целое с упомянутым механизмом (10) управления, обеспечивающий в исправном рабочем состоянии возможность относительного поворота упомянутого элемента (16) управления относительно упомянутого механизма (10) управления вокруг упомянутой первой оси (A);
отличающийся тем, что упомянутый механизм (10) управления содержит
первую тягу (60);
вторую тягу (61), соединенную с упомянутым соединительным элементом (17);
при этом упомянутый винт (4) дополнительно содержит муфту (70), которая позволяет упомянутым первой и второй тягам (60, 61) скользить вдоль упомянутой первой оси (A) как одно целое друг с другом;
при этом упомянутая муфта (70) устроена так, что позволяет упомянутой второй тяге (61) поворачиваться относительно упомянутой первой тяги (60), когда крутящий момент вокруг упомянутой первой оси (А), прилагаемый в процессе эксплуатации упомянутым первым соединительным элементом (17) к упомянутой второй тяге (61), больше порогового значения в случае отказа упомянутого соединительного элемента (17);
при этом упомянутая муфта (70) устроена так, что не позволяет упомянутой второй тяге (61) поворачиваться относительно упомянутой первой тяги (60), когда упомянутый крутящий момент, прилагаемый в процессе эксплуатации упомянутым соединительным элементом (17) к упомянутой второй тяге (61), меньше упомянутого порогового значения.
2. Винт по п. 1, отличающийся тем, что упомянутая муфта (70) содержит фрикционный элемент (72), радиально расположенный между упомянутой первой тягой (60) и упомянутой второй тягой (61) и устроенный с возможностью удерживания соединения упомянутых первой и второй тяг (60, 61) в единое целое по углу поворота, когда упомянутый крутящий момент меньше упомянутого порогового значения.
3. Винт по п. 2, отличающийся тем, что упомянутый фрикционный элемент (72) выполнен из упругодеформируемого материала.
4. Винт по любому из предыдущих пунктов, отличающийся тем, что он содержит датчик (50), предназначенный для генерации сигнала при вращении упомянутой второй тяги (61) относительно упомянутой второй тяги (60) вокруг упомянутой первой оси (A).
5. Винт по п. 4, отличающийся тем, что упомянутый датчик (50) содержит элемент (65), расположенный между упомянутой первой тягой (60) и упомянутой второй тягой (61), при этом упомянутый элемент (65) разрушается при вращении упомянутой второй тяги (61) относительно упомянутой первой тяги (60).
6. Винт по любому из предыдущих пунктов, отличающийся тем, что упомянутая муфта (70) дополнительно содержит первый подшипник (71) качения, расположенный между упомянутыми первой и второй тягами (60, 61).
7. Винт по п. 6, отличающийся тем, что упомянутый первый подшипник (71) способен передавать нагрузку, направленную вдоль упомянутой первой оси (A), между упомянутой первой тягой (60) и упомянутой второй тягой (61)в обоих направлениях,
упомянутый первый подшипник (71) содержит
первое кольцо (75), прикрепленное к упомянутой первой тяге (60);
второе кольцо (76), прикрепленное к упомянутой второй тяге (61); и
группу тел (77) качения, в процессе эксплуатации катящихся по первой и второй дорожкам (78, 79), образованным упомянутыми первым и вторым кольцами (75, 76), соответственно.
8. Винт по любому из предыдущих пунктов, отличающийся тем, что упомянутая первая тяга (60) содержит
трубчатый корпус (24) с открытым осевым концом (45), через который проходит первый сегмент (103) упомянутой второй тяги (61); и
кольцевую крышку (26), предназначенную для закрытия упомянутого осевого конца (45) упомянутого трубчатого корпуса (24), через которую проходит второй сегмент (102) упомянутой второй тяги (61).
9. Винт по п. 8, отличающийся тем, что упомянутый фрикционный элемент (72) расположен между упомянутой кольцевой крышкой (26) и упомянутым вторым сегментом (102) упомянутой второй тяги (61).
10. Винт по п. 8 или 9, отличающийся тем, что упомянутый разрушаемый элемент (65) расположен между упомянутой кольцевой крышкой (26) и упомянутой второй тягой (61).
11. Винт по любому из пп. 8-10, отличающийся тем, что упомянутый трубчатый корпус (24), упомянутая кольцевая крышка (26) и упомянутая вторая тяга (61) образуют второе гнездо (120) для упомянутого первого подшипника (71).
12. Винт по любому из пп. 8-11, отличающийся тем, что упомянутый трубчатый корпус (24) упомянутой первой тяги (60) образует первый буртик (90), расположенный встык с упомянутым первым кольцом (75) упомянутого первого подшипника (71);
при этом упомянутое первое кольцо (75) прикреплено в радиальном направлении относительно упомянутой первой оси (А) к упомянутому трубчатому корпусу (24);
при этом упомянутая кольцевая крышка (26) с проходящей сквозь нее упомянутой второй тягой (61) образует упорную поверхность (85) радиальной выемки в соприкосновении с упомянутым первым кольцом (75) на стороне, противоположной в осевом направлении упомянутому первому буртику (90).
13. Винт по любому из пп. 8-12, отличающийся тем, что упомянутое второе кольцо (76) прикреплено к упомянутому первому сегменту (103) упомянутой второй тяги (61);
при этом упомянутая вторая тяга (61) содержит
второй буртик (104), радиально выступающий из упомянутого второго сегмента (102) и взаимодействующий в осевом направлении с упомянутым вторым кольцом (76) упомянутого первого подшипника (71);
при этом упомянутая муфта (70) дополнительно содержит стопорный элемент (106), закрепленный на упомянутой второй тяге (61) в положении, противоположном в осевом направлении упомянутому второму буртику (104), и взаимодействующий в осевом направлении с упомянутым вторым кольцом (76) упомянутого второго подшипника (71).
14. Винт по любому из предыдущих пунктов, отличающийся тем, что упомянутый соединительный элемент (17) представляет собой второй подшипник (17) качения;
при этом упомянутый второй подшипник (17), в свою очередь, содержит
третье кольцо (30), которое выполнено с возможностью вращению как одно целое с упомянутым элементом (16) управления вокруг упомянутой первой оси (A);
четвертое кольцо (31), находящееся в радиальном направлении относительно упомянутой первой оси (A) внутри упомянутого третьего кольца (30) и движущееся как одно целое с упомянутой второй тягой (61) механизма (10) управления вдоль упомянутой первой оси (A);
группу дополнительных тел (32) качения, которые расположены между третьим и четвертым кольцами (30, 31) и предназначены для качения по соответствующим дополнительным дорожкам (33, 34) упомянутых третьего и четвертого колец (30, 31);
при этом упомянутые первый и второй подшипники (17, 71) качения расположены на соответствующих осевых концах (95, 96) упомянутой второй тяги (61).
15. Вертолет, содержащий
фюзеляж (2);
несущий винт (3);
хвостовой винт (4) по любому из предыдущих пунктов.
| US 9359073 B2, 07.06.2016 | |||
| FR 3014837 A1, 19.06.2015 | |||
| РУЛЕВОЙ ВИНТ ВЕРТОЛЕТА | 2015 |
|
RU2678396C2 |
| КАТОДНЫЙ ПОВТОРИТЕЛЬ | 0 |
|
SU169569A1 |
