Перекрестная ссылка на родственные заявки
Настоящая патентная заявка имеет приоритет над европейской патентной заявкой № 19180445.9, поданной 17/06/2019, полное раскрытие которой включено в настоящий документ путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к рулевому винту для вертолета.
УРОВЕНЬ ТЕХНИКИ
Как известно, вертолеты в основном содержат фюзеляж, несущий винт, расположенный на верхней части фюзеляжа и вращающийся вокруг своей собственной оси, и рулевой винт, расположенный в хвостовом конце фюзеляжа.
Вертолеты также содержат, известным образом, один или несколько силовых блоков, таких как, например, турбины, и блок передачи, размещенный между турбиной и несущим винтом, способным передавать движущую силу от турбин к несущему винту.
Более подробно, рулевой винт, в свою очередь, в основном содержит:
- вал несущего винта, выполненный с возможностью вращаться вокруг первой оси;
- втулку, выполненную с возможностью вращаться вокруг первой оси; и
- группу лопастей, подвешенных на указанной втулке, выступающих консольным образом от втулки, и каждое из которых продолжается вдоль соответствующих вторых осей, поперечных первой оси.
Вал несущего винта рулевого винта приводится во вращение набором шестерен, приводимых в действие основным блоком передачи.
Лопасти рулевого винта вращаются за одно целое с валом несущего винта вокруг первой оси и могут быть выборочно наклонены вокруг второй оси, чтобы быть способными изменять соответствующие углы набегающего потока, а, следовательно, регулировать тягу, прикладываемую рулевым винтом.
Для того, чтобы регулировать углы набегающего потока соответствующих лопастей, рулевые винты содержат:
- штангу, функционально соединенную с педалью, управляемой пилотом через механическое соединение или электро-дистанционную связь, и скользящую внутри вала несущего винта вдоль первой оси, но закрепленную под углом относительно первой оси;
- элемент управления, также известный как «паук», за одно целое вращающийся с валом несущего винта вокруг первой оси и оснащенный группой рычагов, соединенных с соответствующими лопастями в эксцентричном положении относительно связанных вторых осей; и
- антифрикционный подшипник, установленный скользящим образом относительно первой оси, размещенный между штангой и элементом управления и выполненный с возможностью передавать осевую нагрузку от штанги к элементу управления.
Более конкретно, антифрикционный подшипник, в свою очередь, содержит:
- радиально внешнее кольцо, прикрепленное на элементе управления;
- радиально внутреннее кольцо, прикрепленное к управляющей штанге; и
- группу тел качения, которые катятся в соответствующих дорожках качения, образованных радиально внутренними и внешними кольцами.
Работа педали заставляет управляющую штангу скользить параллельно первой оси. Это скольжение заставляет, посредством скользящего антифрикционного подшипника, элемент управления скользить параллельно первой оси вдоль заданной траектории перемещения.
Это скольжение вызывает вращение лопастей вокруг связанных вторых осей так, чтобы изменять соответствующие углы набегающего потока на равные величины, связанные с данной траекторией перемещения.
Из вышеизложенного следует, что возможная неисправность антифрикционного подшипника может привести к риску того, что рулевой винт станет фактически неуправляемым, вызывая опасную ситуацию для вертолета.
В частности, первая ситуация неисправности может возникать в случае, когда тела качения и/или дорожки качения внутренних или внешних колец станут неисправными, например, за счет случайного введения посторонних тел внутрь подшипника, потери консистентной смазки, или неисправности дорожек качения или поверхностей тел качения.
В этих условиях вместо того, чтобы позволять относительное вращение элемента управления к управляющей штанге, антифрикционный подшипник может неправильно передавать крутящий момент, постепенно растущий с течением времени, от внешнего кольца к внутреннему кольцу.
Этот крутящий момент может быть передан к управляющей штанге, создавая риск повреждения управляющей штанги.
Вторая ситуация неисправности может возникать в случае, когда тела качения ломаются с последующим отсоединением внутреннего кольца от тел качения. В этом случае подшипник больше не будет скользить параллельно первой оси, а штанга больше не будет вызывать поступательное перемещение элемента управления.
В отрасли существует понимание необходимости своевременного обнаружения состояния неисправности антифрикционного подшипника, чтобы пилот мог быстро приземлиться до того, как вертолет станет полностью неуправляемым.
Также в отрасли существует понимание необходимости обеспечивать правильное управление рулевым винтом, даже в случае неисправности антифрикционного подшипника.
US-B-9,359,073 описывает рулевой винт для вертолета согласно преамбуле пункта 1 формулы изобретения.
Более подробно, US-B-9,359,073 описывает рулевой винт, содержащий вал несущего винта, штангу и первый и второй подшипники, расположенные последовательно.
Первый подшипник содержит первое кольцо, вращающееся с валом несущего винта, и второе кольцо.
Второй подшипник содержит третье кольцо и четвертое кольцо.
Третье кольцо второго подшипника и первое кольцо первого подшипника соединены друг с другом без возможности вращения.
Рулевой винт также содержит запирающее устройство, размещенное между третьим и четвертым кольцом и способное предотвращать вращение третьего кольца относительно четвертого кольца. Это запирающее устройство содержит элемент, который может ломаться в случае неисправности первого подшипника, и не ломаться в случае правильной работы первого подшипника.
Решение, показанное в US-B-9,359,073, не позволяет сохранять управляемость рулевого винта во второй ситуации неисправности, т.е. в случае, когда тела качения ломаются с последующим отсоединением внутреннего кольца от тел качения.
EP-A-3,216,696 раскрывает рулевой винт согласно преамбуле пункта 1 и пункта 11 формулы изобретения.
US-A-5,407,386 раскрывает безотказную, сегментированную систему приводного вала, содержащую опорный узел сегмента, содержащий шариковый подшипник, для первичного вращения, размещенный внутри подшипника скольжения, для вторичного вращения, который размещен внутри эластомерного демпфера, который имеет вибродатчик, помещенный в нем для обнаружения неисправности, и узел муфты, содержащий гибкую диафрагму для первичного, гибкого соединения между сегментами и зубьями шестерен, которые зацепляются для вторичного соединения при неисправности диафрагмы. Зубья не концентричны с осью вращения, поэтому вибрация указывает на неисправность первичной гибкой муфты.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является предоставление рулевого винта, который позволяет удовлетворять по меньшей мере одну из вышеупомянутых потребностей простым и недорогим образом.
Вышеуказанную задачу достигают настоящим изобретением, в той части, в которой оно относится к рулевому винту, как определено в пунктах 1 и 11 формулы изобретения.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения ниже описаны два предпочтительных варианта выполнения, исключительно путем неограничивающего примера и со ссылкой на сопровождающие чертежи, на которых:
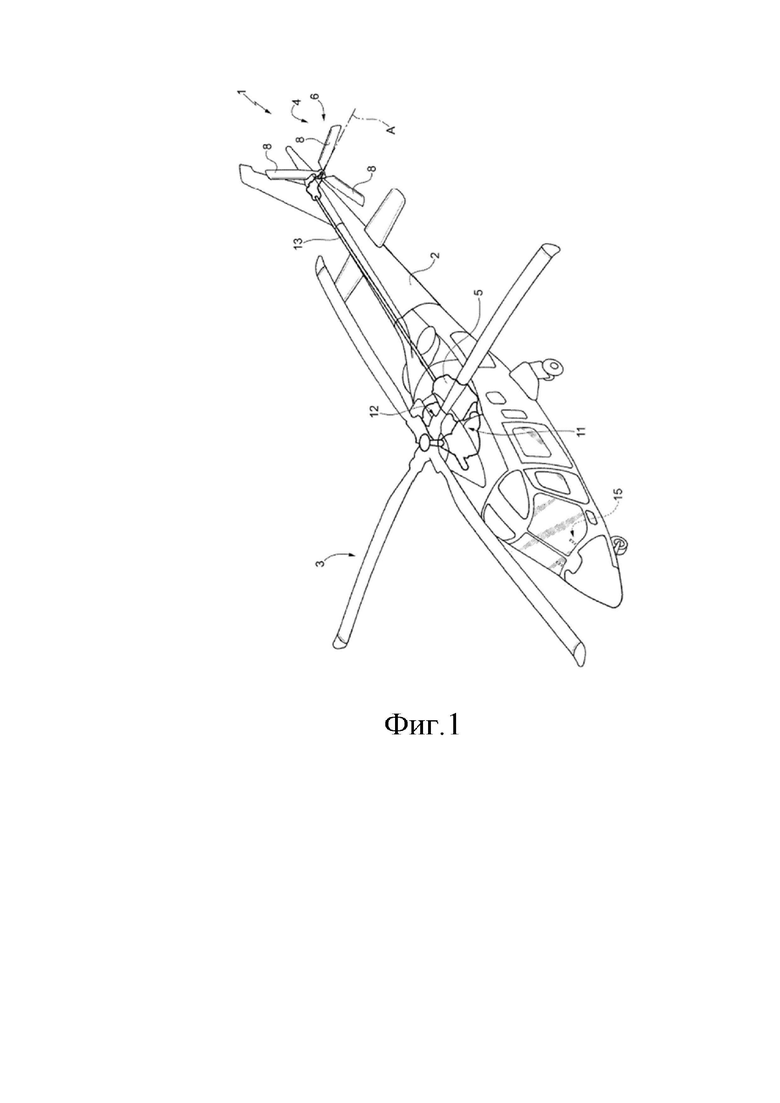
- Фигура 1 представляет собой вид в перспективе вертолета, содержащего рулевой винт согласно первому варианту выполнения настоящего изобретения;
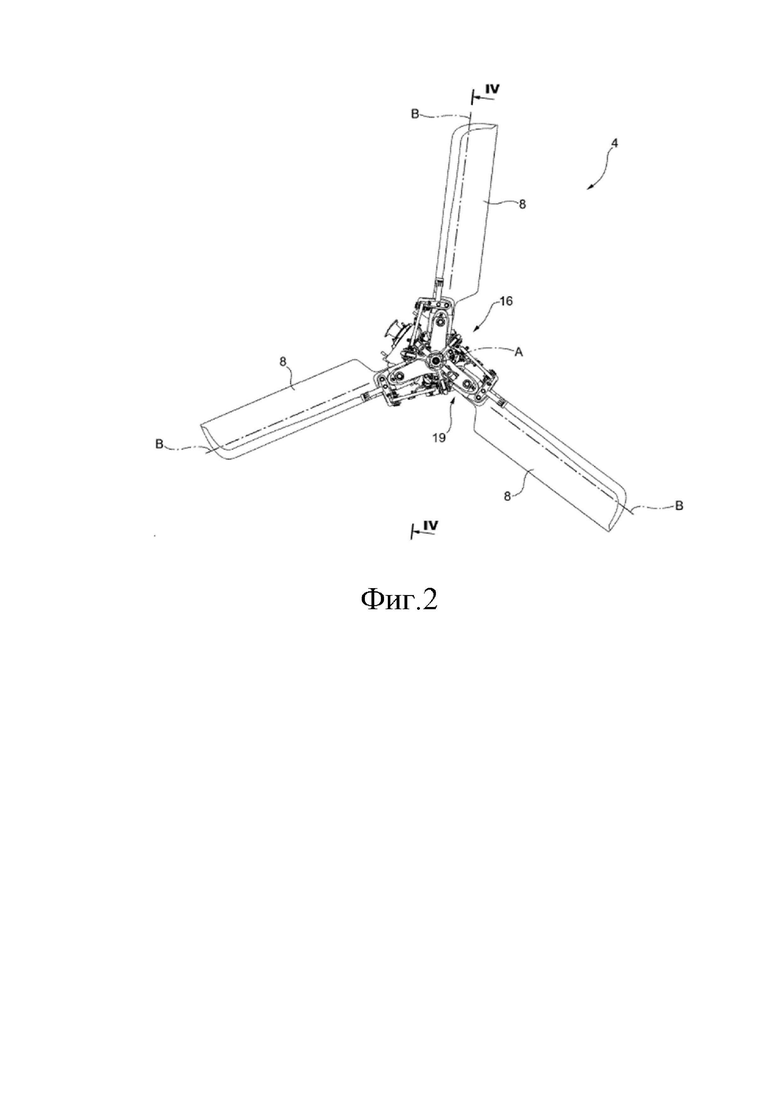
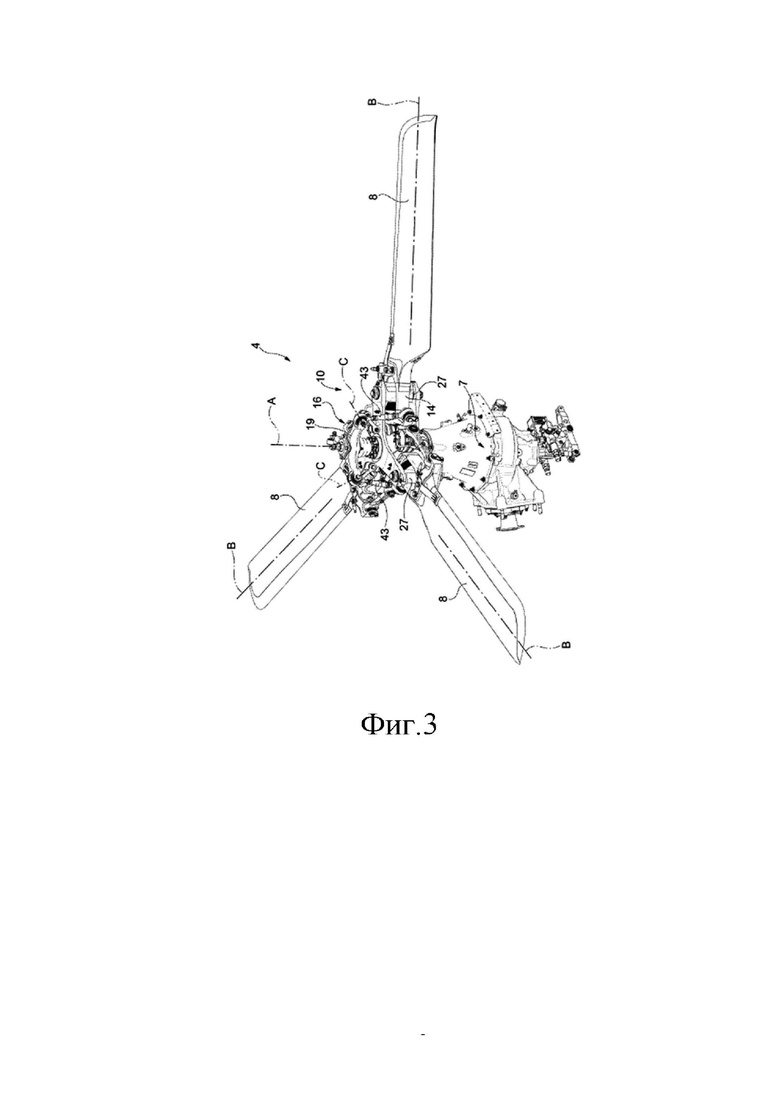
- Фигуры 2 и 3 представляют собой, соответственно, вид сверху и вид в перспективе рулевого винта на Фигуре 1;
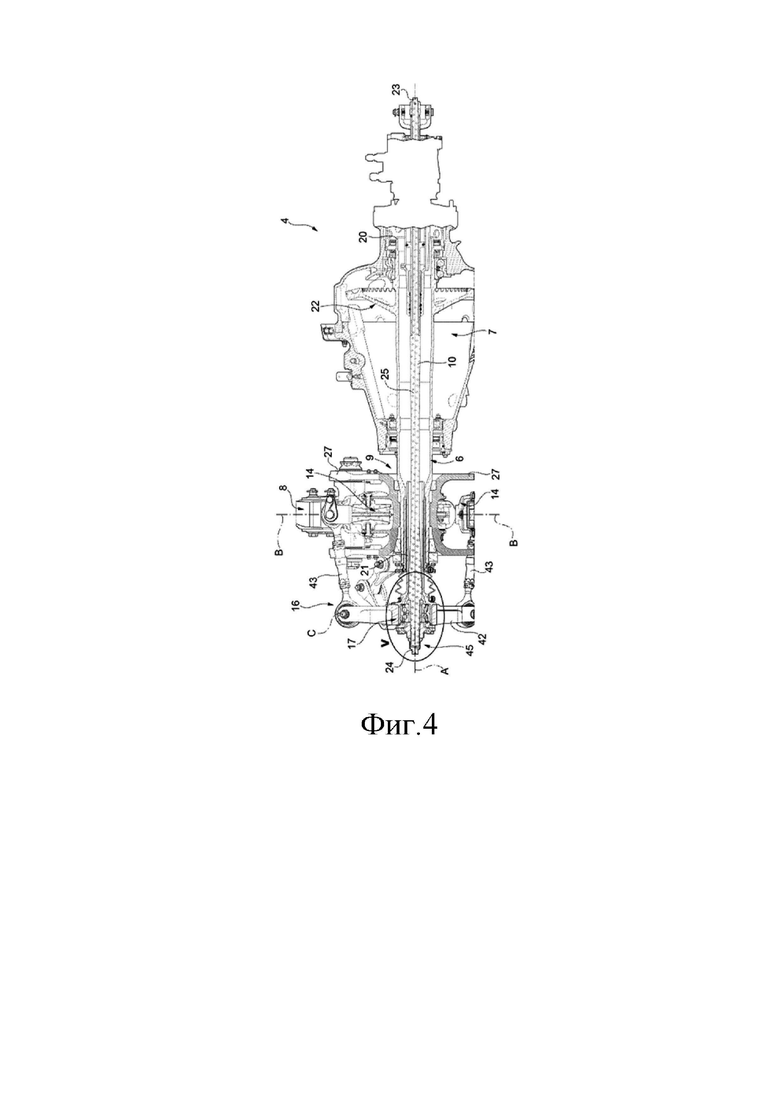
- Фигура 4 представляет собой сечение вдоль линии IV-IV на Фигуре 2;
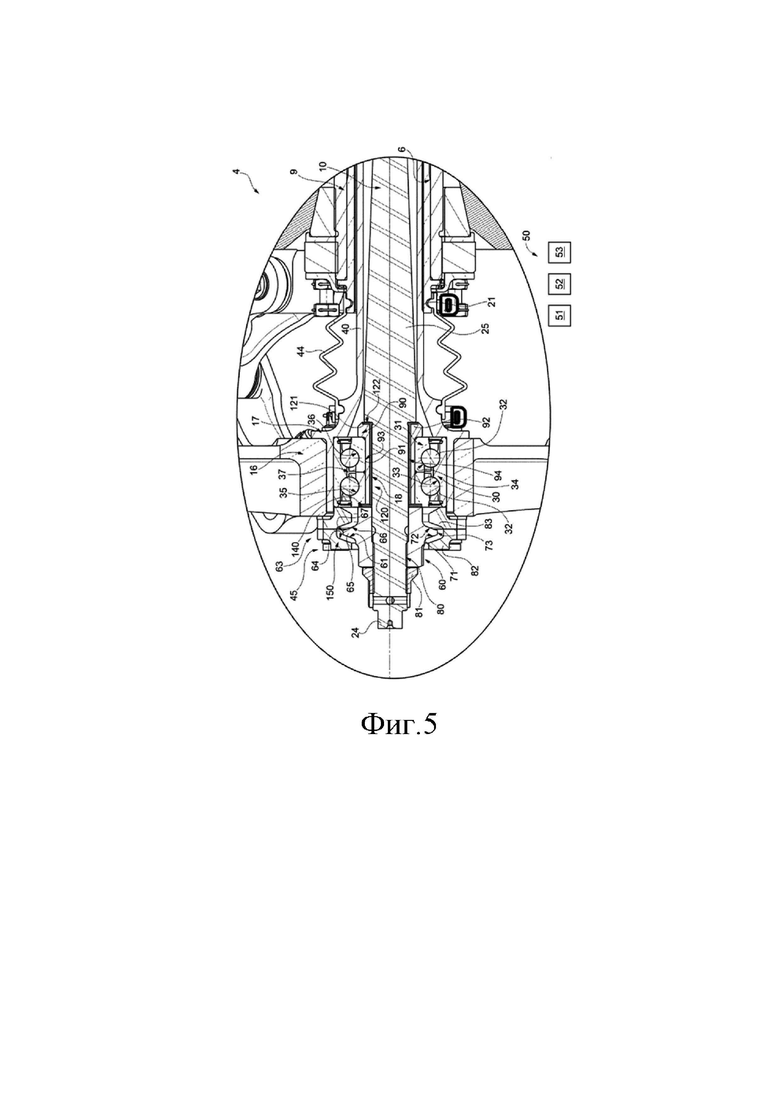
- Фигура 5 представляет собой увеличенный вид некоторых деталей на Фигуре 4; и
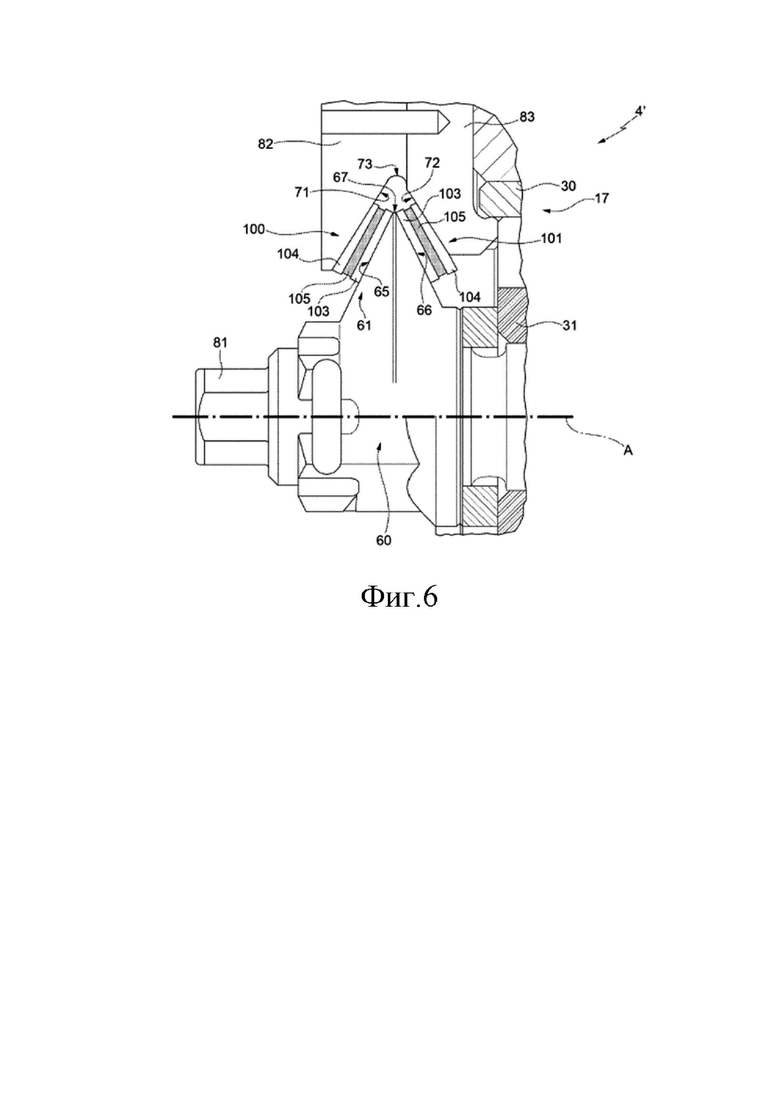
- Фигура 6 показывает, в сильно увеличенном масштабе, дополнительные детали рулевого винта согласно дополнительному варианту выполнения рулевого винта на Фигурах 1-5.
ЛУЧШИЙ ВАРИАНТ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Ссылаясь на Фигуру 1, ссылочная позиция 1 указывает, в частности, вертолет, в основном содержащий:
- фюзеляж 2;
- одну или несколько турбин 5;
- несущий винт 3, расположенный на верхней части фюзеляжа 2 и выполненный с возможностью вращаться вокруг оси A; и
- рулевой винт 4, расположенный в хвостовом конце фюзеляжа 2, и выполненный с возможностью вращаться вокруг своей оси поперечно оси A.
Вертолет 1 также содержит блок 11 передачи, который передает движущую силу от турбин 5 к несущему винту 3.
В свою очередь, блок 11 передачи содержит:
- блок 12 шестерен, который передает движущую силу от турбины 5 к винту 3; и
- вал 13, который передает движущую силу от блока 12 шестерен к винту 4.
Известным образом, винт 3 способен предоставлять ориентируемую тягу, которая позволяет вертолету 1 взлетать и лететь вперед.
Винт 4 создает тягу, которая вызывает противодействующий момент на фюзеляже 2.
Этот противодействующий момент направлен в противоположном направлении крутящего момента, прикладываемого винтом 3.
В соответствии с величиной тяги, созданной винтом 4, следовательно, возможно ориентировать вертолет 1 в соответствии с желаемым углом курса, или изменять указанный угол курса в зависимости от маневра, который он желает выполнить.
Ссылаясь на Фигуры 2-5, винт 4 в основном содержит:
- вал 6 несущего винта, выполненный с возможностью вращаться вокруг оси A и функционально соединенный с валом 13 известным образом;
- группу 8 лопастей, насчитывающую три в показанном случае, которые продолжаются консольным образом вдоль соответствующих осей B поперечно оси A; и
- втулку 9, снаружи прикрепленную к участку вала 6 несущего винта, за одно целое вращающуюся с валом 6 несущего винта вокруг оси A, и на которой подвешены лопасти 8.
Более конкретно, лопасти 8 подвешены на втулке 9 так, чтобы быть:
- выполненными за одно целое с возможностью вращаться с втулкой 9 и валом 6 несущего винта вокруг оси A; и
- выполненными с возможностью наклона вокруг их соответствующих осей B под одинаковыми углами и одновременно, чтобы изменять соответствующие углы набегающего потока.
В частности, втулка 9 содержит группу соединительных элементов 27, выступающих радиально относительно оси A для соединения с соответствующими лопастями 8. Каждая лопасть 8 также содержит корневой участок 14, расположенный радиально внутри относительно оси A и подвешенный на связанном соединительном элементе 27 втулки 9.
Для изменения вышеупомянутых углов набегающего потока, винт 4 также содержит:
- орган 15 управления полетом (только схематично показанный на Фигуре 1), управляемый пилотом, например, педаль;
- управляющую штангу 10, скользящую параллельно оси A и управляемую органом 15 управления полетом посредством механического соединения или электро-дистанционным способом;
- элемент 16 управления, вращающийся за одно целое с валом 6 несущего винта вокруг оси A и соединенный с лопастями 8 эксцентричным образом относительно связанных осей B; и
- подшипник 17, размещенный между штангой 10 и элементом 16, и скользящий совместно со штангой 10 параллельно оси A.
Более конкретно, вал 6 несущего винта является полым.
Вал 6 несущего винта также содержит (Фигуры 4 и 5):
- осевой конец 20;
- осевой конец 21, открытый и противоположный концу 20; и
- основной участок 22, размещенный между осевыми концами 20 и 21, и на котором установлена втулка 9.
Основной участок 22 также образует фланец 19, предназначенный для приема движущей силы от вала 13.
Более конкретно, вал 6 несущего винта имеет максимальный диаметр на фланце 19, и постепенно уменьшающийся диаметр, идущий от фланца 19 к концам 20 и 21.
Штанга 10 частично вмещена внутри вала 6 несущего винта.
Штанга 10 также содержит:
- конец 23;
- конец 24, в осевом направлении противоположный концу 23; и
- основной корпус 25, проходящий через концы 20 и 21 вала 6 несущего винта.
Концы 23 и 24 расположены снаружи вала 6 несущего винта и на сторонах концов 20 и 21, соответственно.
Основной корпус 25 функционально соединен с органом 15 управления полетом рычажным механизмом (не показан) или беспроводной линией управления.
Элемент 16, в свою очередь, содержит (Фигура 5):
- трубчатый корпус 40, частично вмещенный в вале 6 несущего винта, и соединенный с валом 6 несущего винта скользящим образом относительно оси A, и частично вмещающий штангу 10;
- фланец 42, продолжающийся ортогонально оси A и прикрепленный к трубчатому корпусу 40 на конце, противоположном валу 6 несущего винта; и
- группу рычагов 43 (Фигура 4), подвешенных на фланце 42 вокруг соответствующих осей C, поперечных оси A, и подвешенных на соответствующих лопастях 8 в эксцентричном положении относительно связанных осей B.
Фланец 42 и подшипник 17 вмещены снаружи вала 6 несущего винта и окружают штангу 10.
Более конкретно, фланец 42 и подшипник 17 расположены на конце, противоположном концам 20 и 23 относительно концов 21 и 24.
Фланец 42 соединен с валом 6 несущего винта кольцевой, переменной длины сильфонной муфтой 44, которая позволяет скольжение вдоль оси A.
Рычаги 43 в общем наклонены относительно оси A и продолжаются от фланца 42 к концам 20 и 23.
Поступательное перемещение штанги 10 вдоль оси A вызывает, через подшипник 17, поступательное перемещение элемента 16.
После скольжения элемента 16 вдоль оси A, рычаги 43 меняют свой наклон относительно оси A под одинаковыми взаимно идентичными углами, вызывая одновременное вращение лопастей 8 вокруг их соответствующих осей B под одинаковыми взаимно равными углами.
В частности, рычаги 43 подвешены на корневых участках 14 соответствующих лопастей 8.
Подшипник 17 способен передавать осевые нагрузки параллельно оси A в обоих направлениях.
Другими словами, подшипник 17 выполнен так, что поступательное перемещение штанги 10 вдоль оси A в обоих направлениях вызывает поступательное перемещение элемента 16 в тех же направлениях.
Таким образом, подшипник 17 образует блок передачи, который соединяет штангу 10 и элемент 16 в осевом направлении за одно целое и угловым образом подвижно относительно оси A.
Подшипник 17, в свою очередь, содержит:
- внешнее кольцо 30, за одно целое вращающееся с элементом 16;
- внутреннее кольцо 31, за одно целое скользящее со штангой 10; и
- группу тел 32 качения, двойное кольцо шариков в показанном случае, катящихся на соответствующих дорожках 33 и 34 качения, образованных соответствующими кольцами 30 и 31.
В показанном случае кольцо 31 имеет два плеча 35 и 36 на взаимно противоположных осевых сторонах, выступающих радиально по направлению к кольцу 30 и образующих соответствующие осевые упорные поверхности для тел 32 качения. Тела 32 качения, в частности, в осевом направлении размещены между плечами 35 и 36.
Кроме того, кольцо 31 выполнено из двух полуколец, расположенных в осевом направлении в контакте друг с другом в показанном случае.
Кольцо 30 содержит плечо 37, в осевом направлении размещенное между плечами 35 и 36, выступающее радиально по направлению к кольцу 31 и образующее соответствующие упорные поверхности для тел 32 качения. Плечо 37 в осевом направлении размещено между телами 32 качения на плоскости симметрии подшипника 17, радиальной оси A.
Кроме того, внешнее кольцо 30 прикреплено на трубчатом корпусе 40 элемента 16 на противоположной стороне к фланцу 42 в направлении, радиальном оси A.
Винт 4 также содержит дополнительный блок 45 передачи движущей силы, функционально соединенный со штангой 10 и с элементом 16.
Блок 45 передачи доступен:
- в активной конфигурации, в которой он заставляет элемент 16 скользить вдоль оси A, следуя за поступательным перемещением указанной штанги 10 вдоль оси A; или
- в неактивной конфигурации, в которой он отсоединен от элемента 16.
Более подробно, блок 45 передачи установлен в активной конфигурации в случае неисправности подшипника 17.
Далее в настоящем описании термин “неисправность” подшипника 17 означает любое рабочее состояние, в котором подшипник 17 больше не способен передавать осевую нагрузку от штанги 10 к элементу 16, т.е. вызывать осевое поступательное перемещение в обоих направлениях элемента 16 вслед за осевым поступательным перемещением штанги 10.
В качестве неограничивающего примера, первое рабочее состояние "неисправности" возникает, когда внутренне кольцо 31 подшипника 17 приводится во вращение телами 32 качения и, за счет трения, создает крутящий момент на штанге 10.
Второе рабочее состояние “неисправности” возникает, когда тела 32 качения подшипника 17 ломаются, так что штанга 10 становится в осевом направлении подвижной относительно элемента 16.
В противном случае, блок 45 передачи установлен в неактивной конфигурации, когда подшипник 17 правильно позволяет относительное вращение элемента 16 относительно штанги 10 и предотвращает любое относительное поступательное перемещение между элементом 16 и штангой 10.
Винт 4 также содержит средство 50 обнаружения, которое содержит:
- датчик 51, способный создавать первый сигнал, связанный с неисправностью подшипника 17; и/или
- датчик 52, способный создавать второй сигнал, связанный с блоком 45 передачи, находящимся в активной конфигурации.
Блок 45 передачи, в свою очередь, предпочтительно содержит:
- кольцевой выступ 61, в осевом направлении выполненный за одно целое со штангой 10 и радиально выступающий от штанги 10; и
- гнездо 64, зацепленное выступом 61, и под углом и в осевым направлении выполненное за одно целое с элементом 16.
Более подробно, блок 45 передачи в основном содержит (Фигуры 4 и 5):
- цилиндрический корпус 60, гайка в показанном случае, выполненный за одно целое с штангой 10 и содержащий кольцевой выступ 61, выступающий радиально от стороны, противоположной штанге 10; и
- кольцо 63, выполненное за одно целое с элементом 16 и снабженное гнездом 64, открытым по направлению к оси A и зацепленным выступом 61.
Выступ 61 ограничен в осевом направлении двумя стенками 65 и 66, противоположными друг другу.
В показанном случае выступ 61 имеет трапециевидный профиль и содержит дополнительную стенку 67, размещенную между стенками 65 и 66. В частности, стенка 67 продолжается параллельно оси A.
В частности, стенки 65 и 66 наклонены друг к другу относительно оси A, лежащей на соответствующих плоскостях, сходящихся на противоположной стороне оси A относительно штанги 10, и продолжаются симметрично относительно плоскости, радиальной оси A.
Гнездо 64 ограничено в осевом направлении двумя стенками 71 и 72, противоположными друг другу.
В показанном случае гнездо 64 также имеет трапецеидальный профиль и содержит дополнительную стенку 73, в осевом направлении размещенную между стенками 71 и 72. В частности, стенка 73 продолжается параллельно оси A.
Аналогично стенкам 65 и 66, стенки 71 и 72 наклонены друг к другу относительно оси A, лежащей на соответствующих плоскостях, сходящихся на противоположной стороне оси A относительно штанги 10 и продолжающихся симметрично относительно плоскости, радиальной оси A.
Выступ 61 зацепляет гнездо 64 с осевым и радиальным зазором относительно оси A.
Более конкретно, когда блок 45 передачи установлен в неактивной конфигурации, выступ 61 в осевом направлении отделен от гнезда 64, т.е. обе стенки 66 и 67 выступа 61 отделены от соответствующих стенок 71 и 72 гнезда 64, как показано на Фигуре 5.
И наоборот, когда блок 45 передачи установлен в активной конфигурации, выступ 61 создает осевой контакт с гнездом 64. Более конкретно, стенка 71 создает контакт со стенкой 65, или стенка 72 создает контакт со стенкой 66, гарантируя, что скольжение штанги 10 в обоих направлениях параллельно оси A заставляет элемент 16 скользить в обоих направлениях.
Кроме того, стенка 73 гнезда 64 радиально отделена от стенки 67 выступа 61.
В частности, цилиндрический корпус 60 соединен со штангой 10 резьбовым соединением 80.
Блок 45 передачи также содержит стопорную гайку 81, которая навинчена на штангу 10 и расположена в осевом упоре к цилиндрическому корпусу 60 на конце, в осевом направлении противоположном подшипнику 17.
В частности, стопорная гайка 81 навинчена на конец 24 штанги 10.
Кольцо 63 образовано двумя полукольцами 82 и 83, которые находятся в осевом контакте друг с другом.
Более конкретно, полукольцо 83 в осевом направлении размещено между полукольцом 82 и подшипником 17.
Полукольцо 83 также находится в осевом контакте с подшипником 17.
Полукольца 82 и 83 образуют соответствующие участки гнезда 64.
В частности, выступ 61 и гнездо 64 покрыты низкофрикционным материалом 150.
Точнее, низкофрикционный материал 150 осажден на стенках 66 и 67 выступа 61 и стенках 71 и 72 гнезда 64.
Более конкретно, стенка 71 создает контакт со стенкой 65, или стенка 72 создает контакт со стенкой 66.
Предпочтительно, винт 4 также содержит втулку 90, радиально размещенную между кольцом 31 и штангой 10, и в осевом направлении размещенную между штангой 10 и цилиндрическим корпусом 60.
Более подробно, втулка 90 продолжается соосно штанге 10.
Втулка 90 в основном содержит:
- основной корпус 91; и
- осевой конечный выступ 92, который имеет диаметр, больший, чем у основного корпуса 91, и выступает радиально от основного корпуса 91 по направлению к элементу 16 от стороны, противоположной оси A.
Более подробно, основной корпус 91 содержит:
- радиально внешнюю поверхность 93, которая создает контакт с кольцом 31 подшипника 17; и
- радиально внутреннюю поверхность 94, которая создает контакт с поверхностью 18 штанги 10, радиально внешнюю относительно оси A.
Выступ 92 образует осевой конец втулки 90, обращенный по направлению к концу 23 штанги 10, и расположенный в упоре к кольцевому плечу 121 штанги 10.
Цилиндрический корпус 60 содержит концевую поверхность 140, продолжающуюся радиально, и расположенную в контакте с кольцом 31.
Предпочтительно, винт 4 содержит границу 120 раздела, выполненную из антифрикционного материала, размещенного между штангой 10 и подшипником 17 так, чтобы позволять вращение всего подшипника 17 относительно штанги 10 вокруг оси A.
Граница 120 раздела содержит первое покрытие из антифрикционного материала, продолжающегося в осевом направлении, и расположенного на поверхности 94 втулки 90 и на поверхности 18 штанги 10.
Граница 120 раздела также содержит второе покрытие, продолжающееся радиально на плече 121 и на поверхности 122 выступа 92 в контакте с плечом 121 и в осевом направлении, противоположном кольцу 31 подшипника 17.
Граница 120 раздела способна предотвращать нежелательное вращение штанги 10 вокруг оси A. Это нежелательное вращение может возникать, если, вслед за состоянием неисправности подшипника 17, тела 32 качения передают крутящий момент к кольцу 31, а, следовательно, трением, к втулке 90.
В показанном случае втулка 90 выполнена из стали, а поверхности 93 и 94 покрыты твердым оксидом, более конкретно, вольфрамом.
Альтернативно, втулка 90 выполнена из бронзы и имеет конструкцию с полостями, которые захватывают смазочный материал.
Материал поверхности 18 и поверхностей 93 и 94 имеет такой коэффициент трения, чтобы избегать, в вышеупомянутом состоянии неисправности, нежелательного вращения втулки 90, передающей крутящий момент к штанге 10, достаточный, чтобы вызывать нежелательное вращение штанги 10.
Граница 120 раздела также содержит третье покрытие, осажденное на поверхности 140 в контакте с кольцом 31 подшипника 17.
Кольцо 30 подшипника 17 в осевом направлении закреплено соответствующими частями в осевом направлении, противоположными друг другу, между трубчатым корпусом 40 элемента 16 и кольцом 63.
Кольцо 31 подшипника 17 в осевом направлении закреплено, соответствующими частями, в осевом направлении противоположными друг другу, между выступом 92 втулки 90 и цилиндрическим корпусом 60.
Средство 50 обнаружения также содержит датчик 53, способный создавать третий сигнал, связанный с вращением втулки 90 вокруг оси A.
Кроме того, датчик 51 способен обнаруживать по меньшей мере одно из: температуру и ускорение подшипника 17 и/или втулки 90.
При использовании работа винта 3 создает тягу, которая позволяет поддерживать вертолет 1 в воздухе и лететь вперед вертолету 1.
Работа винта 3 также создает крутящий момент на фюзеляже 2, который сбалансирован встречным крутящим моментом, созданным тягой винта 4.
Для управления углом курса вертолета 1, пилот управляет органом 15 управления полетом, так чтобы регулировать шаг лопастей 8 винта 4, а, следовательно, тягу, созданную винтом 4.
Во время работы винта 4, вал 6 несущего винта приводится во вращение вокруг оси A валом 13 и приводит во вращение втулку 9, элемент 16 лопасти 8 вокруг оси A. Штанга 10, наоборот, остается закрепленной под углом относительно оси A.
Работа винта 4 описана ниже, начиная от состояния, в котором подшипник 17 работает правильно, а блок 45 передачи, следовательно, установлен в неактивной конфигурации.
В этом состоянии работа органа 15 управления полетом вызывает поступательное перемещение штанги 10 в данном направлении вдоль оси A.
Это поступательное перемещение вызывает за одно целое поступательное перемещение подшипника 17 и элемента 16 вдоль оси A.
Вследствие этого, элемент 16 перемещается от (или ближе к) лопастей 8 и изменяет наклон рычагов 43 относительно оси B.
Это перемещение рычагов 43 вызывает одновременное вращение на равные углы лопастей 8 вокруг связанных осей B и последующее регулирование углов набегающего потока лопастей 8.
Если, вслед за неисправностью подшипника 17, тела 32 качения неправильно передают крутящий момент кольцу 31, а, следовательно, втулке 90, первое и второе покрытия границы 120 раздела предотвращают штангу 10 от приведения во вращение.
Более конкретно, антифрикционный материал поверхностей 94 и 18, образующий первое покрытие, и поверхности 122 и плеча 121, образующий второе покрытие, предотвращает нежелательное вращение втулки 90 от передачи крутящего момента к штанге 10, достаточного для того, чтобы вызывать нежелательное вращение штанги 10.
Антифрикционный материал третьего покрытия границы 120 раздела, осажденный на поверхности 140, предотвращает возникновение нежелательного вращения кольца 31 подшипника 17, вызывающее нежелательное вращение кольца 63 и штанги 10.
Кроме того, датчик 51 обнаруживает температуру и ускорение подшипника 17 и втулки 90 и, в случаях, где эти значения подразумевают неисправность подшипника 17, создает первый сигнал.
Кроме того, в вышеописанном состоянии стенки 65 и 66 выступа 61 в осевом направлении отделены от соответствующих стенок 71 и 72 гнезда 64, как показано на Фигуре 5.
Вследствие этого блок 45 передачи, образованный цилиндрическим корпусом 60 и кольцом 63, не выполняет активную роль в передаче перемещения от штанги 10 к элементу 16.
В случае неисправности подшипник 17 больше не способен передавать осевую нагрузку от штанги 10 к элементу 16, т.е. вызывать за одно целое поступательное перемещение штанги 10 и элемента 16 параллельно оси A.
Датчик 53 создает третий сигнал, который информирует пилота об опасной ситуации.
В этой ситуации блок 45 передачи активирован, что позволяет сохранять управляемость рулевого винта 4, по меньшей мере в течение заданного периода времени.
Более подробно, работа органа 15 управления полетом вызывает поступательное перемещение штанги 10 и кольца 63 до положения, где выступ 61 создает осевой контакт с гнездом 64 кольца 63.
Более конкретно, стенка 65 (66) выступа 61 сначала создает контакт со стенкой 71 (72) гнезда 64 кольца 63, а затем в осевом направлении толкает ее.
Таким образом, блок 45 передачи находится в активной конфигурации и поступательное перемещение штанги 10 продолжается, чтобы вызывать поступательное перемещение элемента 16 через цилиндрический корпус 60 и кольцо 63.
Активация блока 45 передачи создает небольшую величину зазора на элементе 16, соответствующую избыточному перемещению, которое штанга 10 должна покрывать, чтобы приводить к тому, что выступ 61 упирается в гнездо 64.
Датчик 52 создает второй сигнал, который информирует пилота о том, что блок 45 передачи находится в активной конфигурации.
Ссылаясь на Фигуру 6, ссылочная позиция 4’ указывает рулевой винт согласно второму варианту выполнения настоящего изобретения.
Винт 4’ аналогичен винту 4 и будет описан ниже только в отношении различий с последним; где возможно, идентичные или эквивалентные части винтов 4 и 4’ будут указаны одинаковыми ссылочными позициями.
В частности, винт 4’ отличается от винта 4 тем, что для уменьшения трения между выступом 61 и гнездом 64, он содержит:
- подшипник 100, размещенный между стенкой 65 выступа 61 и стенкой 71 гнезда 64; и
- подшипник 101, размещенный между стенкой 66 выступа 61 и стенкой 72 гнезда 64.
Предпочтительно, подшипники 100 и 101 являются роликовыми или шариковыми или игольчатыми подшипниками.
В частности, каждый подшипник 100 (101) содержит:
- кольцо 103, прикрепленное к стенке 66 (67);
- кольцо 104, прикрепленное к стенке 71 (72); и
- группу тел 105 качения, которые размещены между кольцами 103 и 104.
В показанном случае кольца 103 и 104 имеют форму усеченного конуса.
В показанном случае тела 105 качения представляют собой иглы, имеющие соответствующие оси, наклоненные относительно оси A.
Работа винта 4’ аналогична работе винта 4 и поэтому не описана подробно.
Из исследования свойств винтов 4 и 4’ согласно настоящему изобретению, очевидны преимущества, которые могут быть с ними достигнуты.
В частности, в случае повреждения тел 32 качения, которое приводит к физическому отделению колец 31 и 30, поступательное перемещение штанги 10 приводит к тому, что выступ 61 упирается в гнездо 64. Таким образом, обеспечивается правильное поступательное перемещение элемента 16 и последующая управляемость углом набегающего потока лопастей 8 и винтов 4 и 4’.
За счет этого выступ 61 и гнездо 64 блока 45 передачи образуют дополнительный и резервный путь передачи управления от штанги 10 к элементу 16 относительно подшипника 17.
Таким образом, блок 45 передачи обеспечивает управляемость углом набегающего потока лопастей 8, даже в случае неисправности подшипника 17.
Как только выступ 61 упирается в гнездо 64, датчик 52 создает второй сигнал, который информирует пилота о том, что блок 45 передачи находится в активной конфигурации. Таким образом, пилота информируют о том, что желательно приземлиться, как только это возможно.
Если вслед за неисправностью подшипника 17, тела 32 качения неправильно передают крутящий момент кольцу 31 и втулке 90, вызывая их вращение, граница 120 раздела существенно ограничивает риск того, что этот крутящий момент передается к штанге 10.
Таким образом, риск того, что штанга 10 становится поврежденной этим крутящим моментом, и что винт 4 или 4’, следовательно, становится неуправляемым, существенно ограничивается.
Датчик 53 создает третий сигнал, который информирует пилота об опасном состоянии, и что желательно приземлиться, как только это возможно.
Наконец, ясно, что модификации и варианты могут быть выполнены в отношении винта 4 и 4’, описанного и проиллюстрированного в настоящем документе без отклонения от объема, определенного формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ ВИНТ ДЛЯ ВЕРТОЛЕТА | 2020 |
|
RU2799274C2 |
| РУЛЕВОЙ ВИНТ ДЛЯ ВЕРТОЛЕТА | 2020 |
|
RU2797602C2 |
| ХВОСТОВОЙ ВИНТ ДЛЯ ВЕРТОЛЕТА | 2020 |
|
RU2799171C2 |
| РУЛЕВОЙ ВИНТ ВЕРТОЛЕТА | 2015 |
|
RU2678396C2 |
| ПРИВОДНАЯ СИСТЕМА НЕСУЩИХ ВИНТОВ | 2013 |
|
RU2641396C2 |
| ВИНТ ВЕРТОЛЕТА И ВЕРТОЛЕТ, СОДЕРЖАЩИЙ ЭТОТ ВИНТ | 2009 |
|
RU2499734C2 |
| УСТРОЙСТВО ДЛЯ ПЛАВАНИЯ И ДАЙВИНГА | 2016 |
|
RU2691537C2 |
| ВЕНТИЛЯТОРНЫЙ МОДУЛЬ С ЛОПАСТЯМИ С ПЕРЕМЕННЫМ УГЛОМ УСТАНОВКИ | 2019 |
|
RU2794134C2 |
| Редуктор с эпициклоидной передачей с трубопроводами для текучей среды и турбовинтовой двигатель с таким редуктором для летательного аппарата | 2014 |
|
RU2653671C2 |
| ПОДШИПНИК СО СРЕДСТВОМ СМАЗКИ И СИСТЕМА ДЛЯ ИЗМЕНЕНИЯ ШАГА ЛОПАСТЕЙ ВОЗДУШНОГО ВИНТА ТУРБОВИНТОВОГО ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, ОБОРУДОВАННОГО УКАЗАННЫМ ПОДШИПНИКОМ | 2013 |
|
RU2630823C2 |
Изобретение относится к области авиации, в частности к конструкциям вертолетов с одним несущим винтом. Рулевой винт (4, 4’) содержит вал несущего винта (6), вращающийся вокруг первой оси (A), группу лопастей (8), продолжающихся вдоль соответствующих вторых осей (B), элемент (16) управления, скользящий вдоль оси (A), управляющую штангу (10), скользящую вдоль оси (A) и закрепленную под углом относительно указанной первой оси (A), соединительный элемент (17), размещенный между управляющей штангой (10) и элементом (16) управления, и блок (45) передачи, доступный в активной конфигурации или неактивной конфигурации. Элемент управления (16) выполнен с возможностью вращаться с валом (6) несущего винта и соединен с лопастью (8). Соединительный элемент скользит вдоль оси (A) за одно целое с управляющей штангой (10) и выполнен с возможностью позволять относительное вращение указанного элемента (16) управления относительно управляющей штанги (10) вокруг оси (A). Блок (45) передачи содержит кольцевой выступ (61) и гнездо (64), зацепленное выступом (61), под углом выполненное за одно целое с элементом (16) управления. Обеспечивается своевременное обнаружение неисправности антифрикционного подшипника, правильное управление рулевым винтом в случае неисправности антифрикционного подшипника. 3 н. и 15 з.п. ф-лы, 6 ил.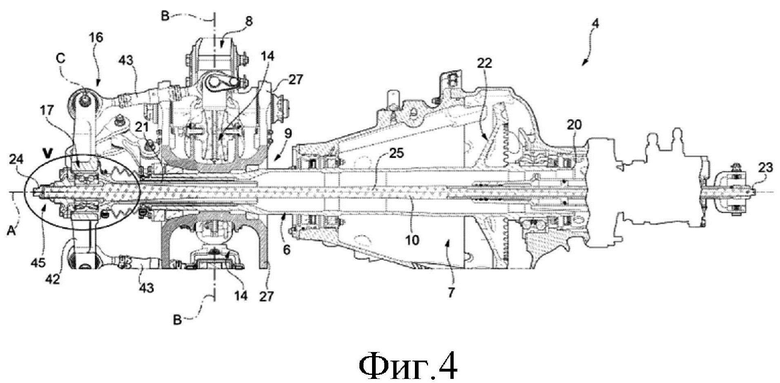
1. Рулевой винт (4’) для вертолета (1), включающий:
- вал (6) несущего винта, выполненный с возможностью вращаться вокруг первой оси (A);
- группу лопастей (8), подвешенных на указанном вале (6) несущего винта, продолжающихся вдоль соответствующих вторых осей (B), поперечных указанной первой оси (A), и выполненных с возможностью вращаться вокруг соответствующих указанных вторых осей (B), чтобы изменять соответствующие углы набегающего потока;
- элемент (16) управления, скользящий вдоль указанной первой оси (A) относительно указанного вала (6) несущего винта, за одно целое вращающийся с указанным валом (6) несущего винта и функционально соединенный с указанными лопастями (8), чтобы вызывать вращение указанных лопастей (8) вокруг соответствующих указанных вторых осей (B) вслед за поступательным перемещением указанного элемента (16) вдоль указанной оси (A);
- управляющую штангу (10), скользящую в осевом направлении вдоль указанной первой оси (A) относительно указанного вала (6) несущего винта и закрепленную под углом относительно указанной первой оси (A);
- первый подшипник (17), размещенный между указанной управляющей штангой (10) и указанным элементом (16) управления, скользящий вдоль указанной первой оси (A) относительно указанного вала (6) несущего винта и за одно целое с указанной управляющей штангой (10), и выполненный с возможностью позволять относительное вращение указанного элемента (16) управления относительно указанной управляющей штанги (10) вокруг указанной первой оси (A); и
- блок (45) передачи, который функционально соединен с указанной управляющей штангой (10) и с указанным элементом (16) управления;
при этом указанный блок (45) передачи выборочно доступен:
- в активной конфигурации, в которой он заставляет указанный элемент (16) управления скользить вслед за поступательным перемещением указанной управляющей штанги (16) вдоль указанной первой оси (A); или
- в неактивной конфигурации, в которой он отсоединен от указанного элемента (16) управления;
при этом указанный блок (45) передачи расположен в указанной активной конфигурации в случае неисправности указанного первого подшипника (17), в которой указанный подшипник (17) больше не способен передавать осевую нагрузку от указанной штанги (10) к указанному элементу (16) управления, вызывая осевое поступательное перемещение в обоих направлениях указанного элемента (16) вслед за осевым поступательным перемещением указанной штанги (10);
при этом указанный блок (45) передачи расположен в указанной неактивной конфигурации, когда указанный первый подшипник (17) правильно обеспечивает относительное вращение указанного элемента (16) и указанной штанги (10) и предотвращает любое относительное поступательное перемещение между указанным элементом (16) и указанной штангой (10);
при этом указанный блок (45) передачи включает:
- кольцевой выступ (61), в осевом направлении выполненный за одно целое с указанной управляющей штангой (10) и радиально выступающий от указанной управляющей штанги (10); и
- гнездо (64), зацепленное указанным выступом (61) и под углом в осевом направлении выполненное за одно целое с указанным элементом (16) управления;
отличающийся тем, что он включает второй подшипник (100, 101), размещенный между указанным выступом (61) и указанным гнездом (64);
при этом указанный винт (4’) дополнительно включает средство (50) обнаружения;
при этом указанное средство (50) обнаружения включает первый датчик (52), способный создавать сигнал, связанный с тем фактом, что указанный блок (45) передачи находится в указанной активной конфигурации.
2. Винт по п. 1, отличающийся тем, что указанный выступ (61) зацепляет указанное гнездо (64) с осевым зазором, когда указанный блок (45) передачи находится в неактивной конфигурации;
при этом указанный выступ (61) создает контакт, при использовании, с указанным гнездом (64), когда указанный блок (45) передачи находится в активной конфигурации.
3. Винт по п. 1 или 2, отличающийся тем, что указанный выступ (61) и указанное гнездо (64) имеют соответствующие трапецеидальные профили в плоскости, содержащей указанную первую ось (A).
4. Винт по любому из предыдущих пунктов, отличающийся тем, что по меньшей мере одно из указанного выступа (61) и указанного гнезда (64) по меньшей мере частично покрыто антифрикционным материалом.
5. Винт по любому из предыдущих пунктов, отличающийся тем, что указанный блок (45) передачи включает:
- втулку (60), установленную коаксиально на указанной управляющей штанге (10) и от которой указанный выступ (61) выступает от стороны, радиально противоположной указанной управляющей штанге (10); и
- кольцо (64), установленное на указанном элементе (16) управления и образующее указанное гнездо (64), открытое по направлению к указанному выступу (61).
6. Винт по любому из предыдущих пунктов, отличающийся тем, что указанный первый подшипник (17) представляет собой первый антифрикционный подшипник (17);
при этом указанный первый подшипник (17) включает:
- первое кольцо (30), за одно целое вращающееся с указанным элементом (16) управления вокруг первой оси (A); и
- второе кольцо (31), радиально внутреннее указанному первому кольцу (30) относительно указанной первой оси (A) и за одно целое скользящее с указанной управляющей штангой (10) вдоль указанной первой оси (A).
7. Винт по п. 6, отличающийся тем, что он включает:
- границу (120) раздела, выполненную из антифрикционного материала, размещенного между указанной управляющей штангой (10) и указанным вторым кольцом (31) указанного первого подшипника (17), чтобы позволять вращение указанного первого подшипника (17) относительно указанной управляющей штанги (10) вокруг указанной первой оси (A); и
- трубчатый элемент (90), радиально размещенный между указанной управляющей штангой (10) и указанным вторым кольцом (31) и в осевом направлении скользящий за одно целое с указанной управляющей штангой (10) и указанным вторым кольцом (31);
при этом указанная граница (120) раздела включает по меньшей мере первую поверхность (94) указанного трубчатого элемента (90), которая расположена в контакте с указанной управляющей штангой (10), и выполненная с возможностью обеспечивать вращение указанного трубчатого элемента (90) совместно с первым подшипником (17) относительно указанной управляющей штанги (10).
8. Винт по п. 7, отличающийся тем, что указанная граница (120) раздела включает вторую поверхность (18) указанной управляющей штанги (10), имеющую осевое расширение и расположенную в контакте с указанной первой поверхностью (94).
9. Винт по п. 7 или 8, отличающийся тем, что указанное второе кольцо (31) в осевом направлении заблокировано между указанной втулкой (60) и радиально выступающим выступом (92) указанного трубчатого элемента (90).
10. Винт по п. 9, отличающийся тем, что указанное средство (50) обнаружения включает:
- второй датчик (53), способный обнаруживать вращение указанного трубчатого элемента (90); и/или
- третий датчик (51), способный обнаруживать по меньшей мере одно из: температуру и ускорение указанного первого соединительного элемента (16) и/или указанного трубчатого элемента (90).
11. Рулевой винт (4, 4’) для вертолета (1), включающий:
- вал (6) несущего винта, выполненный с возможностью вращаться вокруг первой оси (A);
- группу лопастей (8), подвешенных на указанном вале (6) несущего винта, продолжающихся вдоль соответствующих вторых осей (B), поперечных указанной первой оси (A), и выполненных с возможностью вращаться вокруг соответствующих указанных вторых осей (B), чтобы изменять соответствующие углы набегающего потока;
- элемент (16) управления, скользящий вдоль указанной первой оси (A) относительно указанного вала (6) несущего винта, за одно целое вращающийся с указанным валом (6) несущего винта и функционально соединенный с указанными лопастями (8), чтобы вызывать вращение указанных лопастей (8) вокруг соответствующих указанных вторых осей (B) вслед за поступательным перемещением указанного элемента (16) вдоль указанной оси (A);
- управляющую штангу (10), скользящую в осевом направлении вдоль указанной первой оси (A) относительно указанного вала (6) несущего винта и закрепленную под углом относительно указанной первой оси (A);
- соединительный элемент (17), размещенный между указанной управляющей штангой (10) и указанным элементом (16) управления, скользящий вдоль указанной первой оси (A) относительно указанного вала (6) несущего винта и за одно целое с указанной управляющей штангой (10), и выполненный с возможностью позволять относительное вращение указанного элемента (16) управления относительно указанной управляющей штанги (10) вокруг указанной первой оси (A); и
- блок (45) передачи, который функционально соединен с указанной управляющей штангой (10) и с указанным элементом (16) управления;
при этом указанный блок (45) передачи выборочно доступен:
- в активной конфигурации, в которой он заставляет указанный элемент (16) управления скользить вслед за поступательным перемещением указанной управляющей штанги (16), вдоль указанной первой оси (A); или
- в неактивной конфигурации, в которой он отсоединен от указанного элемента (16) управления;
при этом указанный блок (45) передачи, в свою очередь, включает:
- кольцевой выступ (61), в осевом направлении выполненный за одно целое с указанной управляющей штангой (10) и радиально выступающий от указанной управляющей штанги (10); и
- гнездо (64), зацепленное указанным выступом (61) и под углом в осевом направлении выполненное за одно целое с указанным элементом (16) управления;
при этом указанный блок (45) передачи расположен в указанной активной конфигурации в случае неисправности указанного соединительного элемента (17);
при этом указанный блок (45) передачи расположен в указанной неактивной конфигурации, когда указанный соединительный элемент (17) правильно позволяет относительное вращение указанного элемента (16) управления относительно указанной управляющей штанги (10);
указанный винт (4, 4’) дополнительно включает средство (50) обнаружения;
при этом указанное средство (50) обнаружения, в свою очередь, включает первый датчик (52), способный создавать сигнал, связанный с тем фактом, что указанный блок (45) передачи находится в указанной активной конфигурации;
при этом указанный соединительный элемент (17) включает второй подшипник (17) качения;
при этом указанный второй подшипник (17) включает:
- первое кольцо (30), за одно целое вращающееся с указанным элементом (16) управления вокруг первой оси (A); и
- второе кольцо (31), радиально внутреннее указанному первому кольцу (30) относительно указанной первой оси (A) и за одно целое скользящее с указанной управляющей штангой (10) вдоль указанной первой оси (A);
при этом указанный блок (45) передачи расположен в указанной активной конфигурации, когда тела (32) качения указанного соединительного элемента (17) при использовании ломаются, так что указанная управляющая штанга (10) становится в осевом направлении подвижной относительно указанного элемента (16) управления, или когда указанное второе кольцо (31) указанного соединительного элемента (17) приведено, при использовании, во вращение указанными телами (32) качения и, за счет трения, создает, при использовании, крутящий момент на управляющей штанге (10);
при этом указанный блок (45) передачи расположен в указанной неактивной конфигурации, когда указанный соединительный элемент (17) правильно обеспечивает, при использовании, относительное вращение указанного элемента (16) управления относительно указанной управляющей штанги (10) и предотвращает любое относительное перемещение между указанным элементом (16) управления и указанной управляющей штангой (10);
отличающийся тем, что указанный рулевой винт (4, 4’) включает:
- границу (120) раздела, выполненную из антифрикционного материала, размещенного между указанной управляющей штангой (10) и указанным вторым кольцом (31) указанного второго подшипника (17), чтобы позволять вращение указанного второго подшипника (17) относительно указанной управляющей штанги (10) вокруг указанной первой оси (A); и
- трубчатый элемент (90), радиально размещенный между указанной управляющей штангой (10) и указанным вторым кольцом (31) и в осевом направлении скользящий за одно целое с указанной управляющей штангой (10) и указанным вторым кольцом (31);
при этом указанная граница (120) раздела включает по меньшей мере первую поверхность (94) указанного трубчатого элемента (90), которая расположена в контакте с указанной управляющей штангой (10), чтобы позволять вращение указанного трубчатого элемента (90) совместно с указанным вторым подшипником (17) относительно указанной управляющей штанги (10);
при этом указанная граница (120) раздела включает вторую поверхность (18) указанной управляющей штанги (10), имеющей осевое расширение и расположенной в контакте с указанной первой поверхностью (94);
при этом указанное средство (50) обнаружения включает:
- второй датчик (53), способный обнаруживать вращение указанного трубчатого элемента (90); и/или
- третий датчик (51), способный обнаруживать по меньшей мере одно из: температуру и ускорение указанного второго подшипника (17) и/или указанного трубчатого элемента (90).
12. Винт по п. 11, отличающийся тем, что указанный выступ (61) зацепляет указанное гнездо (64) с осевым зазором, когда указанный блок (45) передачи находится в неактивной конфигурации;
при этом указанный выступ (61) создает контакт, при использовании, с указанным гнездом (64), когда указанный блок (45) передачи находится в активной конфигурации.
13. Винт по п. 11 или 12, отличающийся тем, что указанный выступ (61) и указанное гнездо (64) имеют соответствующие трапецеидальные профили в плоскости, содержащей указанную первую ось (A).
14. Винт по любому из пп. 11-13, отличающийся тем, что он включает первый подшипник (100, 101), размещенный между указанным выступом (61) и указанным гнездом (64).
15. Винт по любому из пп. 11-14, отличающийся тем, что по меньшей мере одно из указанного выступа (61) и указанного гнезда (64) по меньшей мере частично покрыто антифрикционным материалом.
16. Винт по любому из пп. 11-15, отличающийся тем, что указанный блок (45) передачи включает:
- втулку (60), установленную коаксиально на указанной управляющей штанге (10), и от которой указанный выступ (61) выступает от стороны, радиально противоположной указанной управляющей штанге (10); и
- кольцо (64), установленное на указанном элементе (16) управления и образующее указанное гнездо (64), открытое по направлению к указанному выступу (61).
17. Винт по любому из пп. 11-16, отличающийся тем, что указанное второе кольцо (31) в осевом направлении заблокировано между указанной втулкой (60) и радиально выступающим выступом (92) указанного трубчатого элемента (90).
18. Вертолет, включающий:
- фюзеляж (2);
- несущий винт (3); и
- рулевой винт (4, 4’) по любому из предыдущих пп. 1-17.
| РУЛЕВОЙ ВИНТ ВЕРТОЛЕТА | 2015 |
|
RU2678396C2 |
| WO 1993002916 A1, 18.02.1993 | |||
| US 5407386 A1, 18.04.1995 | |||
| US 4063786 A1, 20.12.1977 | |||
| ВИНТ ВЕРТОЛЕТА И ВЕРТОЛЕТ, СОДЕРЖАЩИЙ ЭТОТ ВИНТ | 2009 |
|
RU2499734C2 |
