ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится к рулевому винту вертолета.
УРОВЕНЬ ТЕХНИКИ
Известно, что вертолеты содержат фюзеляж, несущий винт, установленный на верхней центральной части фюзеляжа, и рулевой хвостовой винт для компенсации крутящего момента, передаваемого от несущего винта к фюзеляжу.
Рулевые хвостовые винты в целом содержат:
- приводной вал, выполненный с возможностью вращения вокруг первой оси,
- втулку, функционально соединенную с приводным валом также с возможностью вращения вокруг указанной первой оси,
- набор лопастей, выполненных с возможностью вращения за одно целое с указанной втулкой вокруг первой оси, выступающих от втулки и проходящих вдоль соответствующих вторых осей, поперечных первой оси.
Таким образом, лопасти вращаются вокруг первой оси за одно целое с приводным валом и втулкой.
Кроме того, лопасти установлены на втулке с возможностью их поворота вокруг соответствующих им вторых осей для регулирования углов установки лопастей относительно воздушного потока и регулирования, таким образом, подъемной силы, создаваемой лопастями, и, следовательно, тяги, создаваемой рулевым винтом.
В одном известном решении вертолет содержит:
- педаль, управляемую пилотом и расположенную в кабине, ограниченной фюзеляжем вертолета,
- штангу, выполненную с возможностью перемещения вдоль указанной первой оси и функционально соединенную с лопастями для их поворота на равные углы вокруг соответствующих вторых осей и регулирования, таким образом, подъемной силы, создаваемой рулевым винтом,
- механизм, который функционально соединяет указанную педаль с концом штанги на стороне, противоположной лопастям, и через который проходят механические импульсы, создаваемые при импульсном управлении педалью пилотом.
Вертолет также содержит гидравлическое исполнительное устройство, управляемое механическими импульсами, проходящими через указанный механизм, и предназначенное для подачи указанных механических импульсов, увеличенных по силе, к концу штанги.
Гидравлическое исполнительное устройство содержит:
- гидравлический сервопривод, управляемый указанными механическими импульсами и содержащий цилиндр, который ограничивает камеры, заполненные маслом под давлением, и поршень, выполненный с возможностью скольжения вдоль третьей оси, поперечной первой оси,
- первое звено, обеспечивающее преобразование поступательного перемещения поршня вдоль третьей оси в поступательное перемещение штанги вдоль первой оси,
- второе звено, обеспечивающее преобразование поступательного перемещения штанги вдоль первой оси в поворот лопастей вокруг соответствующих вторых осей.
Более конкретно, гидравлический сервопривод прикреплен к коробке передач, функционально соединенной с винтом, причем указанные первое и второе звенья размещены частично внутри фюзеляжа и частично внутри рулевого винта.
Несмотря на то что вышеописанное решение является удовлетворительным с точки зрения надлежащего регулирования углов установки лопастей, оно может быть усовершенствовано.
В частности, известное вышеописанное гидравлическое исполнительное устройство содержит большое количество компонентов, что усложняет его производство, сборку и техническое обслуживание.
По существу, это обусловлено тем, что указанный механизм размещен частично внутри фюзеляжа и частично внутри рулевого винта вертолета.
Таким образом, в данной отрасли существует необходимость в рулевом винте вертолета, содержащем исполнительное устройство, характеризующееся простотой производства, сборки и обслуживания.
Кроме того, в данной отрасли существует необходимость максимизации, насколько это возможно, точности и воспроизводимости регулирования углов установки лопастей для улучшения управления рулевым винтом и маневренности вертолета в целом.
Кроме того, из-за описанного исполнительного устройства неизбежно имеет место загрязнение внутри рулевого винта, в основном вследствие масла, подаваемого в гидравлический двигатель, и необходимости поддерживать его под давлением. Контроль данного масла под давлением приводит к необходимости частого технического обслуживания и утилизации этого масла.
Таким образом, в данной отрасли остается необходимость в регулировании углов установки лопастей рулевого винта с одновременной минимизацией его загрязнения исполнительным устройством.
В патентных документах США №№2,387,617 и 2010/012309 описаны вертолеты с рулевыми винтами, снабженными лопастями с фиксированным углом наклона и приводимыми во вращение электродвигателем.
В патентном документе США №8,464,980 описано использование электродвигателя для вращения приводного вала рулевого винта.
В патентном документе США №2009/0140095 описано использование электродвигателя для вращения рулевого винта вертолета.
В патентном документе США №2013/0264412 описано использование электродвигателя для вращения приводного вала и использование регулирующих средств, функционально расположенных между электродвигателем и рулевым винтом и предназначенных для регулирования углов установки лопастей винта. Указанные регулирующие средства содержат блок памяти и вычислительный блок.
В патентном документе США №4,555,219 описан летательный аппарат с крестообразным крылом, содержащий только один винт с четырьмя лопастями.
В патентном документе Великобритании №2149372 описан вертолет, содержащий первый и второй соосно установленные винты и не содержащий рулевого хвостового винта. Первый винт содержит первый главный вал и две первые лопасти, приводимые во вращение первым главным валом. Второй винт содержит второй главный вал, установленный соосно с первым главным валом, и две вторые лопасти, приводимые во вращение вторым валом.
Для каждого винта, первого и второго, вертолет содержит:
- электродвигатель,
- первый дополнительный вал, выполненный с возможностью осевого перемещения под действием электродвигателя, имеющий фиксированное угловое положение и соединенный первым звеном с концом первой лопасти,
- второй дополнительный вал, выполненный с возможностью осевого перемещения под действием электродвигателя, имеющий фиксированное угловое положение и соединенный вторым звеном с концом второй лопасти.
Первый дополнительный вал, второй дополнительный вал и соответствующий главный вал установлены соосно.
В патентном документе США №2,699,833 описан вертолет, содержащий несущий винт и рулевой винт с лопастями, имеющими относительные изменяемые углы установки. Вертолет также содержит главный двигатель для управления несущим винтом и вспомогательный двигатель, управляемый под действием главного двигателя или с помощью педалей и предназначенный для регулирования углов установки лопастей рулевого винта.
Вспомогательный двигатель расположен снаружи рулевого винта.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью данного изобретения является создание вертолета, выполненного с удовлетворением по меньшей мере одного из вышеуказанных требований недорогим и простым образом.
В соответствии с данным изобретением предложен вертолет, описанный в пункте 1 формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже в качестве примера приведено описание двух предпочтительных вариантов выполнения данного изобретения со ссылкой на прилагаемые чертежи, на которых:
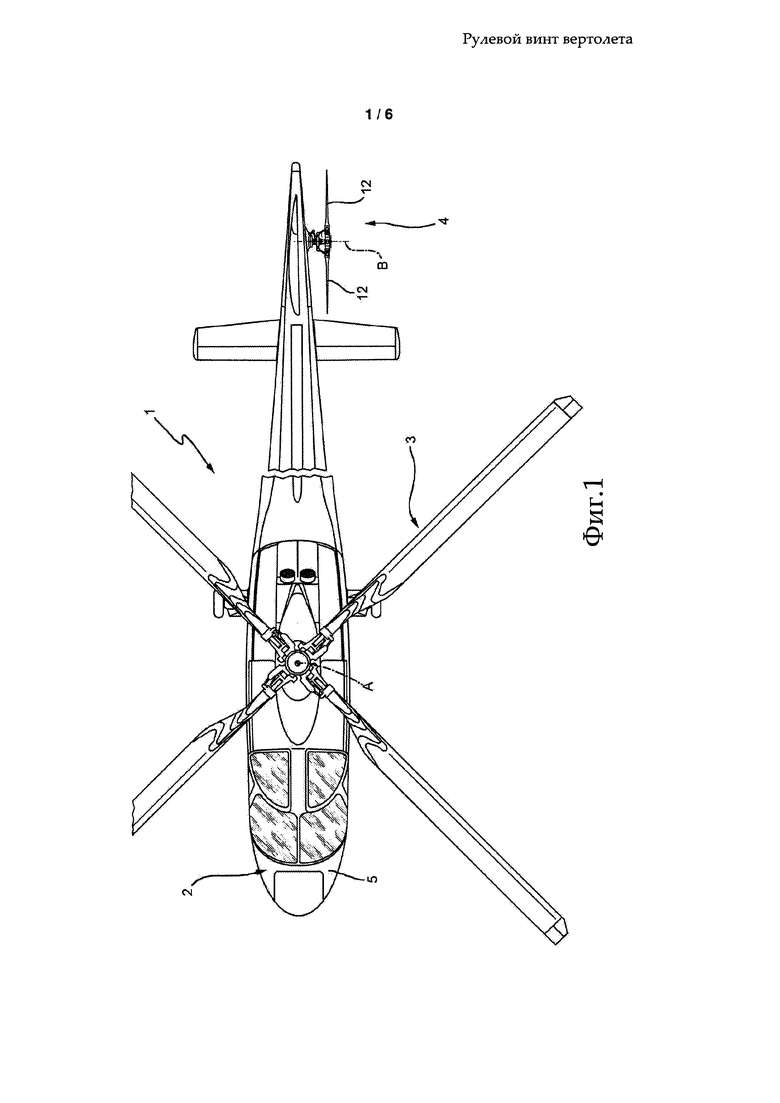
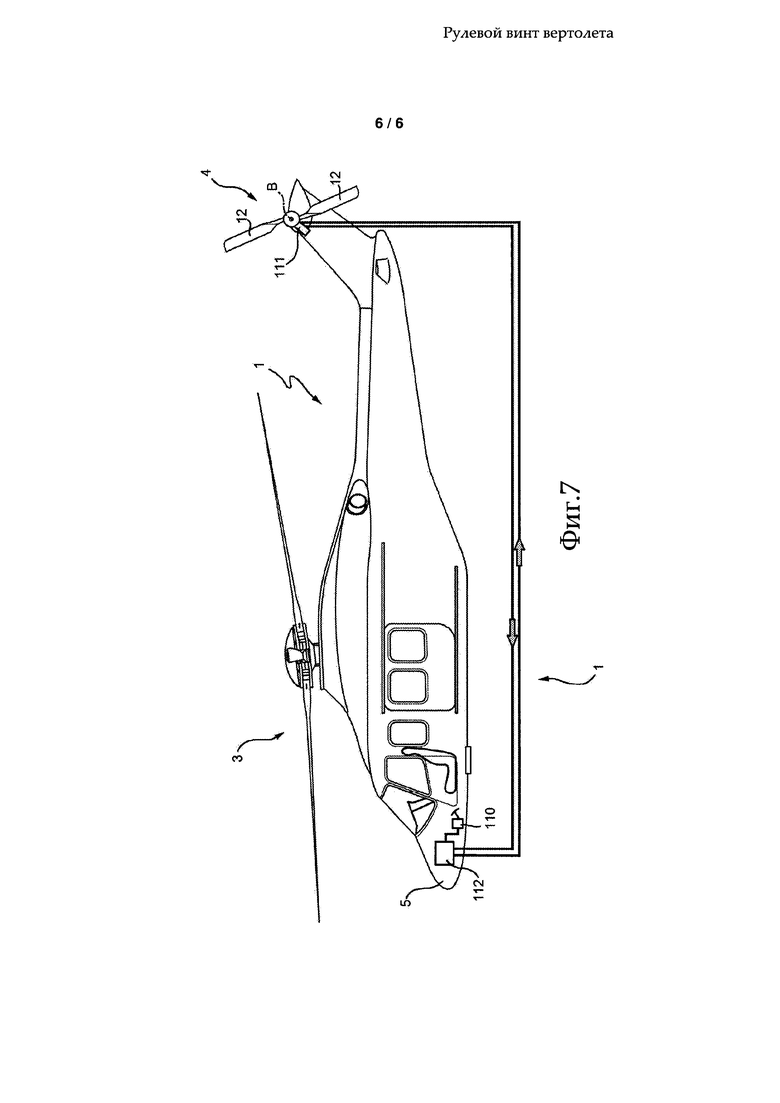
фиг. 1 изображает вид сверху вертолета согласно данному изобретению, содержащего рулевой винт,
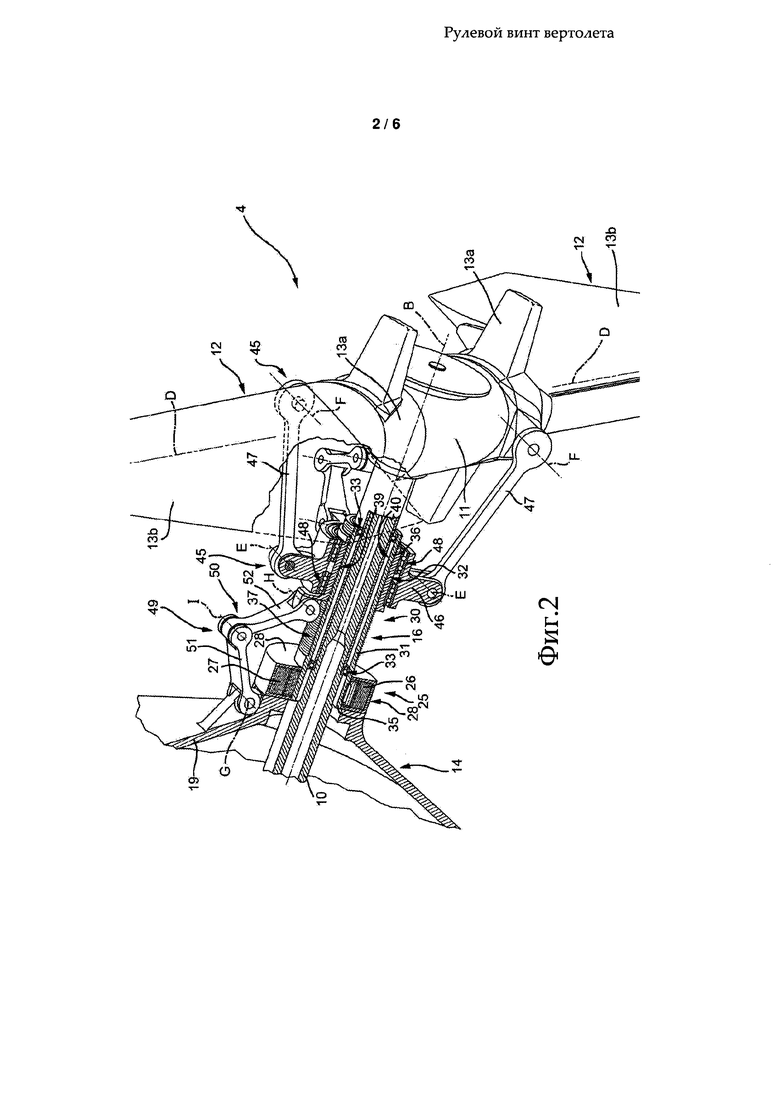
фиг. 2 изображает увеличенный вид в аксонометрии с частичным разрезом первого варианта выполнения рулевого винта вертолета, показанного на фиг. 1, причем некоторые компоненты для ясности не показаны,
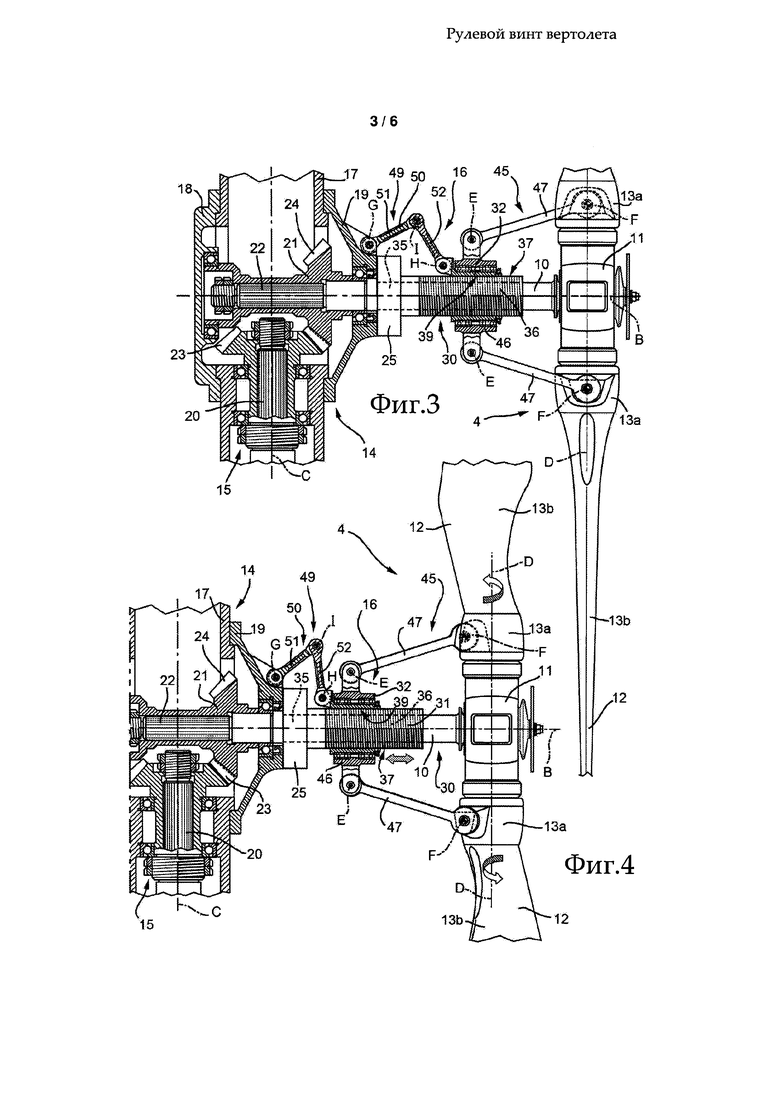
фиг. 3 изображает вид спереди рулевого винта, показанного на фиг. 2, в первом рабочем положении, причем некоторые компоненты для ясности не показаны,
фиг. 4 изображает вид спереди рулевого винта, показанного на фиг. 2, во втором рабочем положении, причем некоторые компоненты для ясности не показаны,
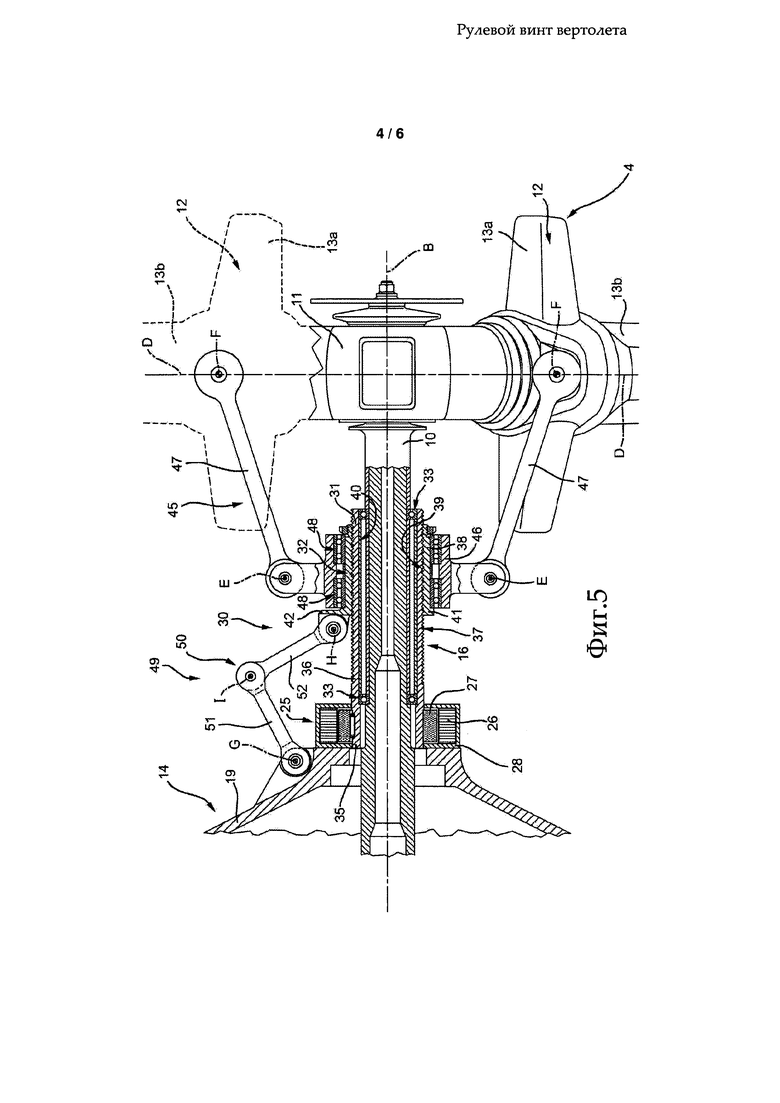
фиг. 5 изображает увеличенный разрез рулевого винта, показанного на фиг. 2-4,
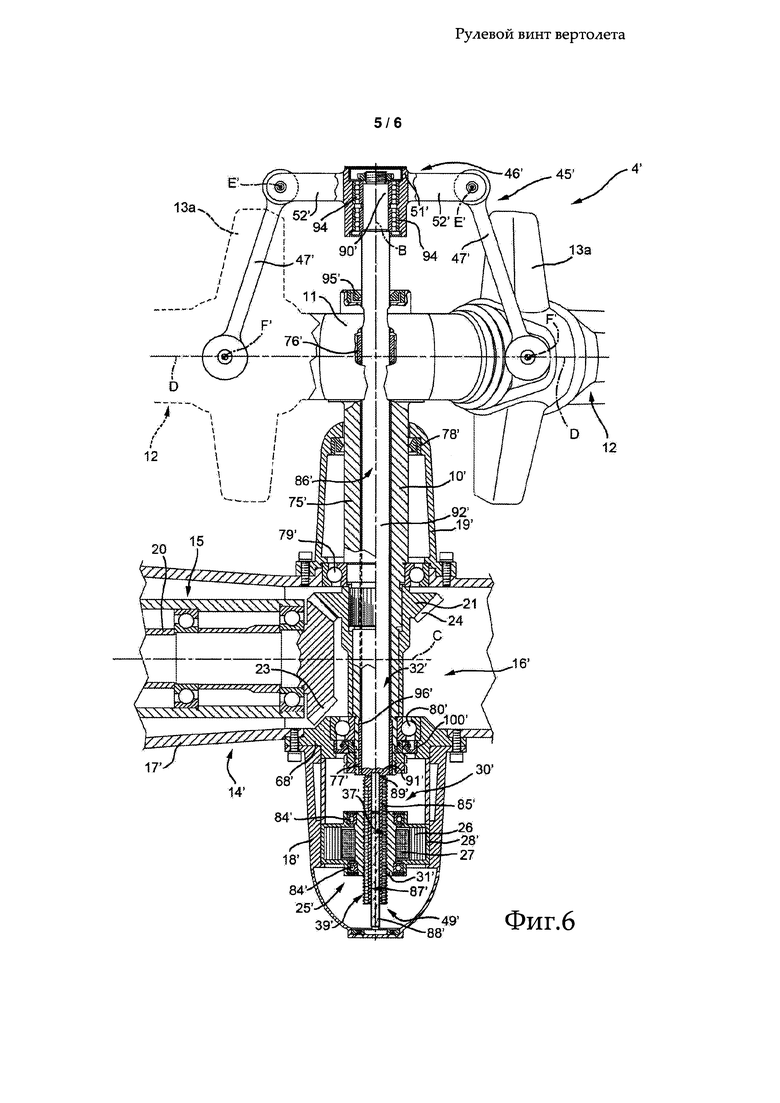
фиг. 6 изображает увеличенный разрез второго варианта выполнения рулевого винта согласно данному изобретению,
фиг. 7 изображает вид сбоку других компонентов вертолета, показанного на фиг. 1.
ПРЕДПОЧТИТЕЛЬНЫЙ ВАРИАНТ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
На фиг. 1 номером 1 позиции обозначен вертолет, в целом содержащий фюзеляж 2 с носовой частью 5, несущий винт 3, установленный на верхней части фюзеляжа 2 и выполненный с возможностью вращения вокруг оси A, и рулевой винт 4, установленный на киле, выступающем от фюзеляжа 2 со стороны, противоположной носовой части 5.
Более конкретно, несущий винт 3 обеспечивает подъемную силу для подъема вертолета 1 и тягу для его перемещения вперед, тогда как винт 4 прикладывает силу к килю для создания выравнивающего крутящего момента на фюзеляже 2. Выравнивающий крутящий момент уравновешивает крутящий момент, который прикладывается к фюзеляжу 2 винтом 3 и который в противном случае поворачивал бы фюзеляж 2 вокруг оси A.
Винт 4 по существу содержит (фиг. 2-5):
- приводной вал 10, выполненный с возможностью вращения вокруг оси B, поперечной оси A вращения несущего винта 3,
- втулку 11, имеющую фиксированное угловое положение относительно вала 10 вокруг оси B, и
- две лопасти 12, выступающие от втулки 11 с противоположных сторон от оси B, имеющие фиксированное угловое положение относительно втулки 11 вокруг оси B и установленные на втулке 11 с возможностью поворота вокруг соответствующих осей D для регулирования соответствующих углов их установки относительно внешнего воздушного потока.
Более конкретно, лопасти 12 проходят в продольном направлении вдоль соответствующих осей D, которые в показанном примере расположены вдоль прямой линии, проходящей поперечно оси B.
В изображенном примере винт 4 представляет собой так называемый «качающийся винт», то есть втулка 11 может колебаться относительно вала 10 вокруг оси, перпендикулярной осям B, D, что обеспечивает возможность махового движения лопастей 12.
В изображенном примере вал 10 выполнен полым.
Каждая лопасть 12 также содержит (фиг. 2-5):
- комель 13а, расположенный в радиальном направлении вблизи оси B и соединенный со втулкой 11, и
- удлиненную основную часть 13b, проходящую параллельно соответствующей оси D и расположенную со стороны комля 13а, противоположной втулке 11 и оси B.
Винт 4 также содержит:
- поддерживающий элемент 14, соединенный (не показано) с фюзеляжем 2 и закрепленный относительно оси B,
- привод 15 (фиг. 3 и 4) для передачи приводного крутящего момент от двигателя (не показан) к валу 10 и вращения, таким образом, втулки 11 и лопастей 12 вокруг оси B и
- исполнительное устройство 16, приводимое в действие для поворота лопастей 12 вокруг соответствующих осей B и регулирования, таким образом, углов установки лопастей 12.
В соответствии с фиг. 2 и 3 поддерживающий элемент 14 содержит:
- элемент 17, проходящий главным образом вдоль оси С, поперечной осям В, D,
- элемент 18 (фиг. 3), соединенный с элементом 17 и расположенный на стороне элемента 17, противоположной лопастям 12,
- элемент 19, соединенный с элементом 17 и расположенный с той же стороны элемента 17, что и лопасти 12.
Более конкретно, привод 15, в свою очередь, содержит (фиг. 3 и 4):
- приводной вал 20, поддерживаемый элементом 17 с возможностью вращения вокруг оси C и функционально соединенный с двигателем,
- вал 21, проходящий параллельно оси B, частично окружающий вал 10 и выполненный с возможностью вращения за одно целое с валом 10 при помощи шлицевой муфты 22,
- коническую зубчатую передачу, расположенную между валом 20 и валом 21 и образованную зубьями 23 на валу 20 и зубьями 24, расположенными на валу 21 и входящими в зацепление с зубьями 23.
Исполнительное устройство 16 предпочтительно содержит:
- электродвигатель 25 (на фиг. 2 и 3 показан только схематично) для создания крутящего момента вдоль оси B и
- механическую ступень 30, расположенную между электродвигателем 25 и лопастями 12 и предназначенную для преобразования крутящего момента, создаваемого электродвигателем 25, в поворот лопастей 12 вокруг соответствующих осей D, причем электродвигатель 25 расположен внутри поддерживающего элемента 14.
Таким образом, электродвигатель 25 встроен в рулевой винт 4.
В данном описании выражение «механическая ступень» означает, что электродвигатель 25 и лопасти 12 соединены друг с другом исключительно при помощи механических компонентов, которые передают перемещение от одного к другому через взаимный контакт. Другими словами, между электродвигателем 25 и лопастями 12 отсутствуют электрические, пневматические или гидравлические компоненты.
Более конкретно, электродвигатель 25 содержит (фиг. 2 и 5):
- статор 26, являющийся кольцевым относительно оси B,
- ротор 27, электрически соединенный со статором 26 и выполненный с возможностью вращения вокруг оси B электрическим крутящим моментом, создаваемым статором 26, и
- кожух 28, который прикреплен к поддерживающему элементу 14 и в котором расположены статор 26 и ротор 27.
В изображенном примере ротор 27 расположен внутри статора 26 в радиальном направлении относительно оси B.
В изображенном примере электродвигатель 25 представляет собой электродвигатель с постоянными магнитами.
Более конкретно, постоянные магниты расположены на роторе 27, при этом статор 26 содержит обмотки постоянного тока.
В варианте выполнения изобретения, изображенном на фиг. 1-5, кожух 28 прикреплен к элементу 19 на стороне, противоположной элементу 18, и выступает от элемента 19 по направлению к лопастям 12.
Предпочтительно механическая ступень 30 содержит:
- вал 31, выполненный с возможностью вращения вокруг оси B и функционально соединенный с ротором 27 электродвигателя 25,
- ползун 32, являющийся кольцевым относительно оси B, выполненный с возможностью скольжения параллельно оси B и функционально соединенный с валом 31 и лопастями 12.
Вал 31 проходит вдоль оси B и, в свою очередь, содержит:
- часть 35, соединенную с ротором 27 и имеющую фиксированное угловое положение относительно оси B, и
- часть 36, образующую резьбовую торцевую поверхность 37 на стороне, противоположной оси B в радиальном направлении.
Более конкретно, часть 35 расположена в осевом направлении на конце, противоположном лопастям 12, а часть 36 расположена в осевом направлении на конце, обращенном к лопастям 12.
Ползун 32 проходит вдоль оси B и, в свою очередь, содержит (фиг. 5):
- удлиненный кольцевой основной элемент 38, расположенный вдоль оси B,
- выступ 41, проходящий в радиальном направлении от основного элемента 38 на стороне, противоположной оси B, и образующий осевой конец ползуна 32 на конце, противоположном лопастям 12.
Более конкретно, выступ 41 также является кольцевым относительно оси B и имеет часть 42, выступающую в радиальном направлении только с одной стороны от оси B.
Другими словами, выступ 41 является асимметричным относительно оси B.
Основной элемент 38 ограничен в радиально внутреннем направлении относительно оси B резьбовой поверхностью 39, сопряженной с поверхностью 37 части 36.
Другими словами, поверхность 37 вала 31 образует резьбовой винт, который поворачивается вокруг оси B, а поверхность 39 ползуна 32 образует резьбовую гайку, накрученную на указанный винт и выполненную с возможностью перемещения вдоль оси B.
Более конкретно, ползун 32 расположен снаружи вала 31 в радиальном направлении относительно оси B.
Вал 31 расположен снаружи вала 10 в радиальном направлении относительно оси B.
Винт 4 также содержит два кольцевых (относительно оси B) подшипника 33, расположенных в радиальном направлении между валом 10 и поверхностью 40 вала 31, противоположной поверхности 37.
В частности, поверхность 40 определяет вал 31 на радиально внутренней стороне относительно оси B.
Таким образом, подшипники 33 обеспечивают возможность вращения валов 31 и 10 вокруг оси B с различными угловыми скоростями.
Исполнительное устройство 16 также содержит звено 45, расположенное между ползуном 32 и лопастями 12 для преобразования поступательного перемещения ползуна 32 вдоль оси B в поворот лопастей 12 на одинаковые углы вокруг соответствующих осей D.
Более конкретно, звено 45 содержит:
- элемент 46, установленный на ползуне 32 и выполненный с возможностью поворота относительно ползуна 32 вокруг оси B,
- два рычага 47, шарнирно прикрепленные к элементу 46 вокруг соответствующих осей E и шарнирно прикрепленные к комлям 13а соответствующих лопастей 12 вокруг соответствующих осей F.
Более конкретно, элемент 46 выполнен с возможностью перемещения за одно целое с ползуном 32 в направлении, параллельном оси B.
Элемент 46 расположен снаружи ползуна 32 в радиальном направлении относительно оси B.
Винт 4 также содержит два подшипника 48 (фиг. 5), расположенных в радиальном направлении между элементом 46 и ползуном 32 для обеспечения возможности поворота элемента 46 и ползуна 32 относительно друг друга вокруг оси B.
В изображенном примере подшипники 48 представляют собой кольцевые роликовые подшипники, соосные с осью В.
Рычаги 47 шарнирно прикреплены к комлям 13а эксцентрично относительно соответствующих осей D.
Другими словами, оси F являются эксцентричными относительно соответствующих осей D.
Таким образом, поступательное перемещение ползуна 32 (вправо или влево на фиг. 3, 4 и 5) вдоль оси B вызывает поворот лопастей 12 вокруг соответствующих осей D.
Оси E проходят перпендикулярно осям B и С.
Оси F проходят параллельно осям E и перпендикулярно осям B и С.
Винт 4 также содержит противоповоротное устройство 49, предназначенное для предотвращения поворота ползуна 32 вокруг оси B вместе с валом 31.
Устройство 49 содержит звено 50, расположенное между поддерживающим элементом 14 и ползуном 32.
Более конкретно, звено 50 расположено между элементом 19 поддерживающего элемента 14 и частью 42 ползуна 32.
Более конкретно, звено 50 содержит:
- рычаг 51, шарнирно прикрепленный к элементу 19 поддерживающего элемента 14 вокруг оси G, параллельной оси E, и
- рычаг 52, шарнирно прикрепленный к выступу 41 вокруг оси Н, параллельной осям G и E, и шарнирно прикрепленный к рычагу 51 вокруг оси I, параллельной осям G, Е и Н.
Оси G, Н и I параллельны осям E и F и перпендикулярны осям B и С.
Вертолет 1 дополнительно содержит (фиг. 7):
- педали 110, которые расположены в фюзеляже 2 и могут приводиться в действие пилотом,
- датчик 111, предназначенный для генерации сигнала, связанного с положением ползуна 32 вдоль оси B и, следовательно, с углами установки лопастей 2,
- блок 112 управления, функционально соединенный с педалями 110, принимающий сигнал от датчика 111 и генерирующий управляющий сигнал для электродвигателя 25.
Датчик 111 может представлять собой, например, синусно-косинусный преобразователь или линейный датчик на основе дифференциального трансформатора.
В изображенном варианте выполнения электродвигатель 25 приводится в действие главной турбиной вертолета 1.
Как вариант, в электродвигатель 25 может быть подана электроэнергия от группы аккумуляторов, расположенных внутри или снаружи винта 4, 4'.
При фактическом использовании привод 15 вращает вал 10 вокруг оси B.
Втулка 11 и лопасти 12 вращаются за одно целое с валом 10 вокруг оси B.
Вал 10 вращается вокруг оси B и, в свою очередь, вращает за одно целое втулку 11 и лопасти 12 вокруг оси B.
При работе винта 4 исполнительное устройство 16 может приводиться в действие для регулирования углов установки лопастей 12 относительно воздушного потока и соответствующего регулирования тяги, создаваемой винтом 4.
Более конкретно, электродвигатель 25 производит крутящий момент для вращения вала 31 вокруг оси B.
Благодаря тому, что резьбовая поверхность 37 вала 31 сопряжена с резьбовой поверхностью 39 ползуна 32, поворот вала 31 приводит к поступательному перемещению ползуна 32 параллельно оси B.
Поступательное перемещение ползуна 32 параллельно оси B вызывает аналогичное поступательное перемещение элемента 46 звена 45 (фиг. 3 и 4).
Как показано на фиг. 3 и 4, поступательное перемещение элемента 46 параллельно оси B обеспечивает поворот рычагов 47 вокруг осей E и F и регулирование наклона рычагов 47 относительно оси B.
Данное регулирование наклона является одинаковым для обоих рычагов 47 и, поскольку оси F эксцентричны относительно осей D, обеспечивает поворот лопастей 12 на одинаковые углы вокруг осей D.
Таким образом, происходит регулирование углов установки лопастей 12 относительно воздушного потока.
Звено 50 обеспечивает предотвращение поворота ползуна 32 вокруг оси 32 при перемещении ползуна 32 параллельно оси B.
На фиг. 6 номером 4' позиции обозначен в целом рулевой винт для вертолета, выполненный в соответствии с другим вариантом выполнения данного изобретения. Рулевой винт 4' аналогичен рулевому винту 4, и ниже описаны только различия между ними, при этом любые соответствующие или эквивалентные компоненты винтов 4, 4' там, где это возможно, обозначены одинаковыми номерами позиций.
В частности, винт 4' отличается от винта 4 тем, что электродвигатель 25' расположен внутри поддерживающего элемента 14'.
В частности, элемент 14' отличается от поддерживающего элемента 14 тем, что элементы 19' и 18' имеют форму соответствующих колоколов, соосных с осью B и сужающихся по направлению к оси B соответственно от элемента 17' в направлении к лопастям 12 и от элемента 17' в направлении от лопастей 12.
Элемент 14' также отличается от элемента 14 тем, что он имеет выступ 68', являющийся кольцевым относительно оси B и расположенный между элементом 17' и элементом 18'.
Винт 4' также отличается от винта 4 тем, что электродвигатель 25' расположен внутри элемента 18'.
Исполнительное устройство 16' отличается от устройства 16 тем, что оно содержит кожух 28', который прикреплен к элементу 18' и к которому прикреплен статор 26.
Механическая ступень 30' отличается от механической ступени 30 наличием вала 10', содержащего:
- осевую концевую часть 76', прикрепленную к втулке 11,
- осевую концевую часть 77', противоположную части 76' и расположенную внутри элемента 18',
- основную часть 75', расположенную частично внутри элемента 17' и частично внутри элемента 19'.
Винт 4' также содержит:
- уплотнение 78', являющееся кольцевым относительно оси B и расположенное в радиальном направлении между элементом 19' и частью 75' вала 10',
- роликовый подшипник 79', являющийся кольцевым относительно оси B и расположенный в радиальном направлении между частью 75' вала 10' и элементом 17',
- роликовый подшипник 80', являющийся кольцевым относительно оси B и расположенный в радиальном направлении между выступом 68' и валом 10'.
Механическая ступень 30' отличается от ступени 30 наличием резьбовой поверхности 37', ограничивающей вал 31' в радиально внутреннем направлении относительно оси B, и резьбовой поверхности 39', ограничивающей ползун 32' в радиально наружном направлении относительно оси B.
Другими словами, вал 31' образует резьбовую гайку, а ползун 32' - резьбовой винт.
Вал 31' отличается от вала 31 тем, что он расположен внутри элемента 18'.
Ступень 30' также отличается от ступени 30 тем, что вал 31' соосно окружает ползун 32'.
Ступень 30' также содержит два роликовых подшипника 84', каждый из которых является кольцевым относительно оси B и расположен в радиальном направлении между кожухом 28' и поверхностью 39' вала 31', которая в радиальном направлении расположена снаружи относительно оси B и противоположна поверхности 37'.
Ползун 32' отличается от ползуна 32 тем, что он содержит:
- трубу 85', расположенную внутри элемента 18' и образующую резьбовую поверхность 39', вкрученную в резьбовую поверхность 37' вала 31',
- штангу 86', функционально соединенную с лопастями 12 на конце, противоположном трубе 85', для преобразования поступательного перемещения штанги 86' вдоль оси B в поворот лопастей 12 вокруг соответствующих осей D.
Более конкретно, штанга 86' и труба 85' выполнены за одно целое друг с другом.
В изображенном примере штанга 86' имеет больший диаметр, чем труба 85'.
Труба 85' образует призматическое гнездо 87', в которое входит противоповоротное устройство 49', предназначенное для предотвращения поворота ползуна 32' вокруг оси B сопряженными резьбовыми поверхностями 37' и 39'.
Устройство 49' содержит удлиненный призматический штифт 88', проходящий вдоль оси B и прикрепленный к элементу 18'.
Труба 85' также имеет набор радиальных отверстий 89', разнесенных с угловым интервалом вокруг оси B, расположенных на осевом конце трубы 85', обращенном к штанге 86', и предназначенных для выпуска воздуха из вала 31'.
Штанга 86', в свою очередь, имеет:
- осевой конец 90', функционально соединенный с лопастями 12 звеном 45',
- осевой конец 91', противоположный концу 90' и ограничивающий штангу 86' у элемента 18',
- основную часть 92', расположенную в осевом направлении между концами 90' и 91' и свободно проходящую внутри приводного вала 10' и втулки 11.
Звено 45' отличается от звена 45 тем, что оно содержит:
- элемент 46', установленный на штанге 86' за одно целое вдоль оси B и выполненный с возможностью углового перемещения вокруг оси B относительно штанги 86',
- два рычага 47', шарнирно прикрепленных к элементу 46' вокруг соответствующих осей E' и к комлям 13а соответствующих лопастей 12 вокруг соответствующих осей F'.
Элемент 46', в свою очередь, содержит:
- трубчатый компонент 51', установленный на штанге 86' и окружающий ее осевой конец 90',
- два плеча 52', выступающих из компонента 51' в соответствующих направлениях, которые являются радиальными и диаметрально противоположными относительно оси B.
Рычаги 47' шарнирно прикреплены к соответствующим плечам 52' элемента 46' вокруг соответствующих осей E' и к комлям 13а соответствующих лопастей 12 вокруг соответствующих осей F'.
Механическая ступень 30' также содержит:
- два роликовых подшипника 94', являющихся кольцевыми относительно оси B и расположенных в радиальном направлении относительно оси B между компонентом 51' и осевым концом 88' штанги 86',
- уплотнение 95', являющееся кольцевым относительно оси B и расположенное в радиальном направлении между основной частью 90' штанги 86' и втулкой 11,
- вкладыш 96', расположенный в радиальном направлении между основной частью 90' штанги 86' и приводным валом 10',
- кольцевое (относительно оси B) уплотнение 100', расположенное смежно с подшипником 80' и предназначенное для герметичной изоляции элемента 18' от элементов 17' и 19'.
Работа винта 4' аналогична работе винта 4 и описана ниже только с точки зрения различий между ними.
Более конкретно, электродвигатель 25' вращает вал 31' вокруг оси B.
Благодаря тому, что резьбовая поверхность 37' вала 31' сопряжена с резьбовой поверхностью 39' трубы 85', поворот вала 31' вызывает поступательное перемещение трубы 85' и штанги 86' за одно целое параллельно оси B.
Поворот трубы 85' и штанги 86' вокруг оси B предотвращается с помощью штифта 88'.
Поступательное перемещение штанги 86' вдоль оси B вызывает аналогичное поступательное перемещение элемента 46' параллельно оси B и поворот рычагов 47' вокруг соответствующих шарнирных осей E' и F'.
Поворот рычагов 47' вокруг соответствующих осей F' приводит к повороту лопастей 12 на одинаковые углы вокруг соответствующих осей D.
Таким образом, происходит регулирование углов установки лопастей 12 и, следовательно, также тяги, прикладываемой винтом 4'.
Подшипники 94' обеспечивают возможность поворота элемента 46' вокруг оси B относительно штанги 86'.
Преимущества вертолета 1 согласно данному изобретению станут очевидны из вышеприведенного описания.
Более конкретно, электродвигатель 25, 25' прикреплен к поддерживающему элементу 14, 14' винта 4, 4' и соединен с лопастями 12 механической ступенью 30, 30'.
По существу, исполнительное устройство 16, 16' полностью встроено в винт 4, 4' и использует только «контактирующие» механические компоненты для передачи движения от электродвигателя 25, 25' к лопастям 12.
Таким образом, в устройстве 16, 16' отсутствуют компоненты, расположенные внутри фюзеляжа 2.
Следовательно, винт 4, 4' характеризуется гораздо более простым производством, сборкой и обслуживанием.
Благодаря тому, что электродвигатель 25, 25' соединен с лопастями 12 ступенью 30, 30', винт 4, 4' обеспечивает высокоточное воспроизводимое регулирование угла установки лопастей 12.
Фактически, скорость и ускорение ползуна 32, 32' определяются исключительно соединением с валом 31, 31', и на них по существу не влияют неконтролируемые внешние параметры.
Кроме того, электродвигатель 25, 25' и механическая ступень 30, 30' не требуют наличия масла или других текучих сред под давлением, что, таким образом, увеличивает срок службы винта 4, 4' по сравнению с известными рулевыми винтами.
Исполнительное устройство 16, 16' содержит вал 31, 31' и ползун 32, 32' с соответствующими резьбовыми поверхностями 37, 37' и 39, 39', сопряженными друг с другом.
По существу, перемещение ползуна 32, 32' вдоль оси B и, следовательно, регулирование углов установки лопастей 12 являются чрезвычайно точными.
Противоповоротные устройства 49, 49' обеспечивают возможность поступательного перемещения ползунов 32, 32', но препятствуют их повороту вокруг оси B.
Особое преимущество винта 4' заключается в том, что электродвигатель 25' и резьбовые поверхности 37', 39' размещены внутри поддерживающего элемента 14'.
Это предотвращает повреждение резьб поверхностей 37', 39' грязью, например пылью, и вызванное таким повреждением нарушение регулирования углов установки лопастей 12.
Очевидно, что вертолет 1, описанный и изображенный в данном документе, может быть подвергнут изменениям без отклонения от объема правовой охраны, определяемого прилагаемой формулой изобретения.
В частности, винт 4, 4' может представлять собой жесткий или шарнирно-сочлененный рулевой винт или так называемый винт типа «фенестрон» (винт в кольце), встроенный в хвостовую балку фюзеляжа 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ ВИНТ ДЛЯ ВЕРТОЛЕТА | 2020 |
|
RU2799272C1 |
| ВИНТ ВЕРТОЛЕТА И ВЕРТОЛЕТ (ВАРИАНТЫ), СОДЕРЖАЩИЙ ЭТОТ ВИНТ | 2010 |
|
RU2525356C2 |
| ВИНТ ВЕРТОЛЕТА И ВЕРТОЛЕТ, СОДЕРЖАЩИЙ ЭТОТ ВИНТ | 2009 |
|
RU2499734C2 |
| РУЛЕВОЙ ВИНТ ДЛЯ ВЕРТОЛЕТА | 2020 |
|
RU2797602C2 |
| УСТРОЙСТВО ГАШЕНИЯ ВИБРАЦИИ ДЛЯ ВЕРТОЛЕТА | 2019 |
|
RU2777706C2 |
| ПРИВОДНАЯ СИСТЕМА НЕСУЩИХ ВИНТОВ | 2013 |
|
RU2641396C2 |
| РУЛЕВОЙ ВИНТ ДЛЯ ВЕРТОЛЕТА | 2020 |
|
RU2799274C2 |
| ВИНТ ВЕРТОЛЕТА И ВЕРТОЛЕТ (ВАРИАНТЫ), СОДЕРЖАЩИЙ ЭТОТ ВИНТ | 2009 |
|
RU2517643C2 |
| УСТРОЙСТВО ГАШЕНИЯ ВИБРАЦИЙ ДЛЯ ВЕРТОЛЕТА | 2019 |
|
RU2780246C2 |
| РУЛЕВОЙ ВИНТ ВЕРТОЛЕТА И ВЕРТОЛЕТ, СОДЕРЖАЩИЙ ЭТОТ РУЛЕВОЙ ВИНТ | 2009 |
|
RU2494013C2 |
Изобретение относится к области авиации, в частности к конструкциям воздушных винтов. Рулевой винт (4, 4') вертолета (1) содержит поддерживающий элемент (14, 14'), приводной вал (10, 10'), выполненный с возможностью вращения вокруг первой оси (В), втулку (11), функционально соединенную с приводным валом (10, 10') и имеющую фиксированное угловое положение относительно первой оси (В). По меньшей мере одна лопасть (12) соединена с втулкой (11), имеет фиксированное угловое положение относительно первой оси и возможность углового перемещения относительно второй оси (D) для регулирования угла установки лопасти (12). Исполнительное устройство (16, 16') может приводиться в действие для регулирования угла установки лопасти (12) и содержит электродвигатель (25, 25'), обеспечивающий создание крутящего момента вдоль указанной первой оси (В), и механическую ступень (30, 30'), расположенную между электродвигателем (25, 25') и лопастью (12) и предназначенную для преобразования указанного крутящего момента в поворот лопасти (12) вокруг соответствующих вторых осей (D). Электродвигатель (25, 25') прикреплен к поддерживающему элементу (14, 14'). Обеспечивается точность установки лопастей для улучшения управления и маневренности вертолета. 5 з.п. ф-лы, 7 ил.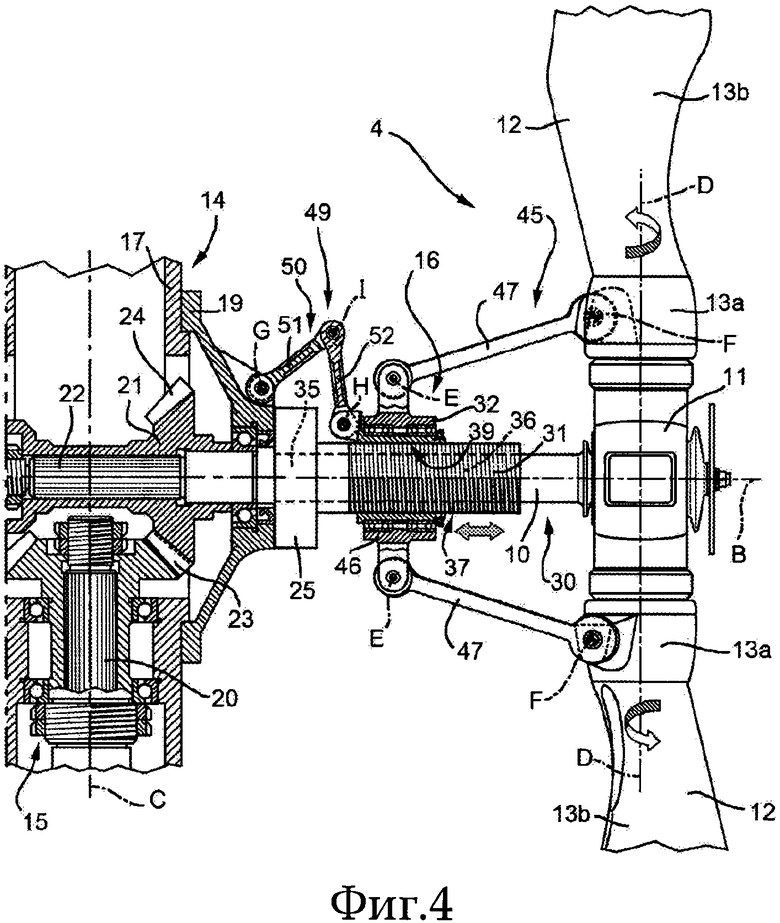
1. Вертолет (1), содержащий
фюзеляж (2) с носовой частью (5),
несущий винт (3), установленный на верхней части фюзеляжа (2),
рулевой винт (4), установленный на фюзеляже (2) со стороны, противоположной носовой части (5), и содержащий
поддерживающий элемент (14),
приводной вал (10), выполненный с возможностью вращения вокруг первой оси (В) относительно указанного поддерживающего элемента (14, 14'),
втулку (11), функционально соединенную с указанным приводным валом (10) и выполненную с возможностью углового поворота совместно с ним вокруг указанной первой оси (В),
по меньшей мере одну пару лопастей (12), функционально соединенных с указанной втулкой (11), выполненных с возможностью углового поворота совместно с ней вокруг указанной первой оси (В) и с возможностью углового поворота вокруг второй оси (D) и относительно указанной втулки (11) для регулирования углов установки указанных лопастей (12), и
исполнительное устройство (16), выполненное с возможностью его приведения в действие для поворота указанных лопастей (12) вокруг указанной второй оси (D) для регулирования угла установки лопасти (12),
причем исполнительное устройство (16), в свою очередь, содержит
электродвигатель (25), обеспечивающий создание крутящего момента вдоль указанной первой оси (В), и
механическую ступень (30), предназначенную для преобразования указанного крутящего момента в поворот лопастей (12) вокруг соответствующих вторых осей (D),
причем между указанным электродвигателем (25) и указанными по меньшей мере двумя лопастями (12) расположена единственная механическая ступень (30), содержащая
поворотный элемент (31), выполненный с возможностью вращения вокруг указанной первой оси (В) при помощи указанного электродвигателя (25),
ползунковый элемент (32), который выполнен с возможностью поступательного перемещения вдоль указанной первой оси (В) и установлен на указанном поворотном элементе (31) и к которому шарнирно прикреплены указанные по меньшей мере две лопасти (12),
отличающийся тем, что электродвигатель (25) прикреплен к указанному поддерживающему элементу (14) и содержит
статор (26), являющийся кольцевым относительно указанной первой оси (В),
ротор (27), электрически соединенный с указанным статором (26) и выполненный с возможностью вращения вокруг указанной первой оси (В) электрическим крутящим моментом, создаваемым статором (26), и
кожух (28), который прикреплен к указанному поддерживающему элементу (14) и выступает от него и в котором расположены указанные статор (26) и ротор (27),
причем электродвигатель (25) расположен снаружи указанного фюзеляжа (2) снаружи относительно указанных приводного вала (10), лопастей (12) и втулки (11),
при этом поворотный элемент (31) образует первую резьбовую поверхность (37), а ползунковый элемент (32) образует вторую резьбовую поверхность (39), сопряженную с указанной первой резьбовой поверхностью (37).
2. Вертолет по п. 1, отличающийся тем, что он содержит по меньшей мере одно звено (45), расположенное между указанным ползунковым элементом (32) и соответствующей лопастью (12) и, в свою очередь, содержащее по меньшей мере один первый рычаг (47), шарнирно прикрепленный к указанной лопасти (12) эксцентрично относительно соответствующей второй оси (D) и шарнирно прикрепленный к указанному ползунковому элементу (32, 32').
3. Вертолет по п. 1 или 2, отличающийся тем, что он содержит противоповоротное устройство (49), установленное на указанном поддерживающем элементе (14), функционально соединенное с указанным ползунковым элементом (32) и предназначенное для предотвращения поворота ползункового элемента (32) при повороте указанного поворотного элемента (31).
4. Вертолет по п. 3, отличающийся тем, что противоповоротное устройство (49) содержит
второй рычаг (51), шарнирно прикрепленный к указанному ползунковому элементу (32),
третий рычаг (52), шарнирно прикрепленный к указанному второму рычагу (51) и к указанному поддерживающему элементу (14).
5. Вертолет по п. 3 или 4, отличающийся тем, что противоповоротное устройство (49) расположено с одной стороны от указанной первой оси (В).
6. Вертолет по любому из предыдущих пунктов, отличающийся тем, что по меньшей мере часть указанного приводного вала (10) расположена внутри по меньшей мере части указанного поворотного элемента (31).
| Способ ускоренного декодирования линейного кода | 2018 |
|
RU2699833C1 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ПОТОКА ГАЗОВОЙ СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2529635C1 |
| US 6371408 B1, 16.04.2002 | |||
| US 4555219 A1, 26.11.1985 | |||
| Устройство для изменения шага винта | 1943 |
|
SU67529A1 |

