Область техники
[1] Изобретение относится к области погрузочно-разгрузочных машин, в частности, к управлению погрузочно-разгрузочной стрелой таких погрузочно-разгрузочных машин.
Уровень техники
[2] Известна погрузочно-разгрузочная машина, описанная в JP3252006, которая содержит корпус машины и погрузочно-разгрузочную стрелу, установленную с возможностью перемещения относительно корпуса машины. Эта машина испытывает, с одной стороны, гравитационные силы от нагрузки, воспринимаемой погрузочно-разгрузочной стрелой, и веса машины, а с другой стороны, силы инерции, вызванные перемещениями погрузочно-разгрузочной стрелы. Эти силы создают опрокидывающий момент, приложенный к корпусу машины, что может вызвать дисбаланс, даже опрокидывание машины, если они превысят определенную пороговую величину. Эта машина содержит средство управления для ограничения перемещений погрузочно-разгрузочной стрелы во избежание такого опрокидывания машины. В частности, средство управления выполняет замедление, и последующую остановку погрузочно-разгрузочной стрелы, когда она приближается к положению, в котором опрокидывающий момент превышает заданную пороговую величину. Эта пороговая величина изменяется в зависимости от угла наклона погрузочно-разгрузочной стрелы относительно земли и скорости приближения к допустимому моменту.
[3] Пороговая величина, используемая в этой машине, не делает различия между случаем, когда увеличение опрокидывающего момента происходит в результате опускания погрузочно-разгрузочной стрелы, и случаем, когда оно возникает в результате выпуска или удлинения погрузочно-разгрузочной стрелы. Таким образом, силы инерции, действующие в обоих случаях, очень отличаются.
Раскрытие сущности изобретения
[4] Одна идея данного изобретения состоит в создании погрузочно-разгрузочной машины, которая обеспечивает большее рабочее пространство для погрузочно-разгрузочной стрелы без риска опрокидывания машины. Для этого другая идея данного изобретение состоит в создании погрузочно-разгрузочной машины, в которой характер перемещения погрузочно-разгрузочной стрелы учитывается при определении пороговой величины, что приводит к прекращению перемещения.
[5] Изобретение предлагает погрузочно-разгрузочную машину, содержащую:
основной корпус,
телескопическую погрузочно-разгрузочную стрелу, которая установлена на указанном основном корпусе, выполнена с возможностью смещения при вращении вокруг горизонтальной оси вращения, и выполнена с возможностью выпуска и втягивания в продольном направлении указанной погрузочно-разгрузочной стрелы,
исполнительные механизмы, выполненные с возможностью подъема и опускания, а также выпуска и втягивания указанной погрузочно-разгрузочной стрелы;
датчик наклона, выполненный с возможностью выдачи сигнала, относящегося к опрокидывающему моменту, приложенному к основному корпусу относительно оси наклона указанной погрузочно-разгрузочной машины;
датчики смещения или датчики запроса на смещение, выполненные с возможностью выдачи сигнала, относящегося к перемещениям или запросам на перемещение погрузочно-разгрузочной стрелы относительно основного корпуса; и
блок управления, выполненный с возможностью приема сигналов от датчика наклона и от датчиков смещения или датчиков запроса на смещение и:
замедления, предотвращения или остановки перемещения погрузочно-разгрузочной стрелы, если сигнал, характеризующий опрокидывающий момент, выше фактической пороговой величины;
присвоение порогового значения опускания указанной фактической пороговой величине в ответ на определение перемещения опускания погрузочно-разгрузочной стрелы или запроса на перемещение опускания;
присвоение порогового значения выдвижения указанной фактической пороговой величине в ответ на явное или неявное определение перемещения выдвижения погрузочно-разгрузочной стрелы;
при этом пороговое значение опускания ниже порогового значения выдвижения.
[6] В частности, пороговая величина опускания представляет собой меньший опрокидывающий момент, чем опрокидывающий момент, представленный пороговой величиной выдвижения.
[7] Такая машина предпочтительна по той причине, что она позволяет использовать более ограничивающую пороговую величину для перемещений опускания погрузочно-разгрузочной стрелы, чем для перемещений выдвижения погрузочно-разгрузочной стрелы. Фактически, силы инерции, создаваемые прерыванием перемещения опускания погрузочно-разгрузочной стрелы, больше, чем силы, вызываемые прерыванием выдвижения погрузочно-разгрузочной стрелы. Соответствие пороговой величины типу перемещения позволяет при выдвижении погрузочно-разгрузочной стрелы более точно приблизиться к пределу устойчивости машины, чем при перемещении опускания погрузочно-разгрузочной стрелы. Таким образом, погрузочно-разгрузочная машина является более эффективной, и при этом остается безопасной.
[8] Согласно другому аспекту изобретения предложен способ управления погрузочно-разгрузочной машиной, содержащей основной корпус и телескопическую погрузочно-разгрузочную стрелу, которая установлена на указанном основном корпусе, выполнена с возможностью смещения при вращении вокруг горизонтальной оси вращения и выполнена с возможностью выпуска и втягивания в продольном направлении указанной погрузочно-разгрузочной стрелы, причем указанный способ включает:
определение сигнала, относящегося к опрокидывающему моменту, приложенному к основному корпусу относительно оси опрокидывания указанной машины;
определение сигнала, относящегося к перемещениям или запросам на перемещение погрузочно-разгрузочной стрелы относительно основного корпуса; и
замедление, предотвращение или остановку перемещения погрузочно-разгрузочной стрелы, если сигнал, характеризующий опрокидывающий момент, выше фактической пороговой величины;
присвоение порогового значения опускания указанной фактической пороговой величине в ответ на определение перемещения опускания погрузочно-разгрузочной стрелы или запроса на перемещение опускания;
присвоение порогового значения выдвижения указанной фактической пороговой величине в ответ на явное или неявное определение перемещения выдвижения погрузочно-разгрузочной стрелы;
при этом пороговое значение опускания ниже порогового значения выдвижения.
[9] Способ управления может быть осуществлен блоком управления, включенным в состав погрузочно-разгрузочной машины.
[10] Согласно предпочтительным вариантам осуществления такая машина или такой способ могут иметь один или более нижеперечисленных признаков.
[11] Исполнительные механизмы погрузочно-разгрузочной машины могут быть изготовлены различными способами. Согласно одному варианту осуществления исполнительные механизмы содержат подъемный исполнительный механизм, например гидравлического или электрического типа, связанный, с одной стороны, с погрузочно-разгрузочной стрелой, а с другой стороны, с основным корпусом, и выполненный с возможностью смещения погрузочно-разгрузочной стрелы при вращении вокруг оси вращения для выполнения перемещений вверх и вниз.
[12] Согласно одному варианту осуществления погрузочно-разгрузочная стрела содержит множество выпускаемых сегментов, а исполнительные механизмы содержат один или более исполнительных механизмов выдвижения, например гидравлического типа, причем каждый исполнительный механизм выдвижения расположен между двумя или более сегментами, выполненными с возможностью выпуска или втягивания погрузочно-разгрузочной стрелы.
[13] Датчики смещения могут смещаться различными способами. Согласно одному варианту осуществления датчики смещения содержат датчик угла наклона, выполненный с возможностью измерения угла наклона погрузочно-разгрузочной стрелы относительно горизонтальной плоскости или относительно основного корпуса погрузочно-разгрузочной машины. Датчик угла наклона может быть расположен на оси вращения. Датчик угла наклона может быть инклинометром.
[14] В качестве альтернативы датчик угла наклона может быть датчиком, расположенным на подвижной части, соединенной с погрузочно-разгрузочной стрелой. Такой датчик может быть выполнен с возможностью определения хода приведения в действие подъемного исполнительного механизма.
[15] Согласно одному варианту осуществления датчики смещения содержат датчик расстояния, выполненный с возможностью измерения диапазона выдвижения погрузочно-разгрузочной стрелы. Датчик расстояния может быть расположен на одном или более сегментах погрузочно-разгрузочной стрелы и выполнен с возможностью измерения расстояния между сегментом или сегментами относительно основного корпуса.
[16] В качестве альтернативы датчик расстояния может быть датчиком, расположенным на подвижной части, соединенной с погрузочно-разгрузочной стрелой. Такой датчик может быть выполнен с возможностью определения хода приведения в действие выдвигающего исполнительного механизма или исполнительных механизмов.
[17] Датчики запроса на перемещение могут быть изготовлены различными способами. Согласно одному варианту осуществления датчики запроса на перемещение могут быть образованы одним или более датчиками, которыми оснащен рычаг или ручка управления, причем этот или эти датчики могут быть, в неограничивающем смысле, переключателями, потенциометрами или датчиками с эффектом Холла, связанными с блоком управления, оснащенным процессором, связанным с исполнительным элементом погрузочно-разгрузочной стрелы, выполненным с возможностью ручного приведение в действие погрузочно-разгрузочной стрелы. В частности, указанный процессор может быть выполнен с возможностью определения сигнала, исходящего от указанного исполнительного элемента, соответствующего перемещению, которое должно выполняться указанной погрузочно-разгрузочной машиной, например, опусканию, подъему, выдвижению и втягиванию погрузочно-разгрузочной стрелы. Согласно одному варианту осуществления процессор может быть встроен в блок управления.
[18] Согласно одному варианту осуществления блок управления выполнен с возможностью присвоения порогового значения опускания фактической пороговой величине при одновременном определении как перемещения опускания, так и выдвижения, или запроса на перемещение погрузочно-разгрузочной стрелы;
[19] Такая конфигурация обеспечивает возможность применения более ограничивающей пороговой величины опускания, чем пороговая величина выдвижения, во время перемещения, состоящего из поворота и выдвижения погрузочно-разгрузочной стрелы. Таким образом, погрузочно-разгрузочная машина является более безопасной.
[20] Согласно одному варианту осуществления блок управления связан с исполнительными механизмами и выполнен с возможностью уменьшения скорости или ускорения указанных исполнительных механизмов и/или остановки гидравлического или электрического питания указанных исполнительных механизмов, когда сигнал, характеризующий опрокидывающий момент, выше фактической пороговой величины.
[21] Согласно одному варианту осуществления в погрузочно-разгрузочной машине расположено средство подачи сигнала, которое выполнено с возможностью отображения или передачи предупреждающего сигнала, если сигнал, относящийся к опрокидывающему моменту, выше фактической пороговой величины. Предупреждающий сигнал может быть звуковым и/или визуальным. Средством подачи сигнала может быть дисплей, расположенный в кабине погрузочно-разгрузочной машины, предназначенный для пользователя погрузочно-разгрузочной машины. В качестве альтернативы или в дополнение, средством подачи сигнала может быть сигнальное приспособление, расположенное в указанной кабине, выполненное с возможностью передачи предупреждающего сигнала.
[22] В частности, блок управления выполнен с возможностью управления средством подачи сигнала для отображения или передачи предупреждающего сигнала.
[23] Блок управления может быть выполнен с возможностью определения перемещения погрузочно-разгрузочной стрелы различными способами. Согласно одному варианту осуществления блок управления выполнен с возможностью обнаружения уменьшения угла наклона, измеренного датчиком угла наклона, и определения перемещения опускания упомянутого погрузочно-разгрузочной стрелы в ответ на уменьшение угла наклона.
[24] Согласно одному варианту осуществления блок управления выполнен с возможностью обнаружения увеличения длины погрузочно-разгрузочной стрелы и определения перемещения выдвижения указанного погрузочно-разгрузочной стрелы в ответ на увеличение длины погрузочно-разгрузочной стрелы.
[25] Пороговая величина опускания и пороговая величина выдвижения могут быть выбраны различными способами, в частности, для исключения перемещений, связанных с чрезмерным количеством перемещения, а именно количества перемещения, которое машина не в состоянии воспринять или произвести без риска создания неустойчивости. Согласно одному варианту осуществления, пороговая величина опускания и/или пороговая величина выдвижения заранее определены, в частности, в зависимости от геометрии погрузочно-разгрузочной стрелы и основного корпуса и предварительно сохранены в встроенной памяти погрузочно-разгрузочной машины. В частности, пороговая величина опускания и/или пороговая величина выдвижения являются постоянными.
[26] Датчики наклона могут быть изготовлены различными способами. Согласно одному варианту осуществления погрузочно-разгрузочная стрела может быть ориентирована вокруг оси, поперечной основному корпусу, в частности, горизонтальной оси, расположенной на первом конце погрузочно-разгрузочной стрелы, а основной корпус установлен на колесах, поддерживаемых осями,
причем датчик наклона содержит тензодатчик, расположенный на оси, противоположной второму концу погрузочно-разгрузочной стрелы, и
сигнал, относящийся к опрокидывающему моменту, является сигналом, относящимся к деформации оси, противоположной второму концу погрузочно-разгрузочной стрелы.
[27] Согласно одному варианту осуществления датчик наклона содержит датчик давления или силы, расположенный на подъемном исполнительном механизме, причем сигнал, относящийся к опрокидывающему моменту, является сигналом, относящимся к нагрузке, приложенной к подъемному исполнительному механизму.
[28] Согласно одному варианту осуществления датчик наклона содержит несколько датчиков, измеряющих несколько физических величин, в частности, относящихся к нагрузке, переносимой погрузочно-разгрузочной стрелой, и/или к положению погрузочно-разгрузочной стрелы. Согласно этому варианту осуществления датчик наклона выполнен с возможностью определения сигнала, относящегося к опрокидывающему моменту, в зависимости от указанных физических величин.
[29] Согласно одному варианту осуществления погрузочно-разгрузочная машина содержит множество стабилизирующих опор, выполненных с возможностью выпуска или втягивания из основного корпуса, и
пороговая величина опускания и/или пороговая величина выдвижения изменяется в зависимости от наличия выпуска или отсутствия выпуска указанных стабилизирующих опор.
[30] Такая погрузочно-разгрузочная машина, в частности, может быть изготовлена в виде тележки с телескопическими стрелами, вилочного погрузчика, подъемного крана, бульдозера-экскаватора, ковшового погрузчика или тому подобного. Погрузочно-разгрузочная стрела также может быть выполнена с возможностью ориентации относительно вертикальной оси основного корпуса.
[31] Согласно одному варианту осуществления способ включает присвоение порогового значения опускания в ответ на одновременное определение как перемещения опускания, так и перемещения выдвижения, или запроса на перемещение погрузочно-разгрузочной стрелы.
[32] Согласно одному варианту осуществления способ включает определение угла наклона погрузочно-разгрузочной стрелы относительно горизонтальной плоскости или основного корпуса погрузочно-разгрузочной машины и определение перемещения опускания при уменьшении угла наклона.
[33] Согласно одному варианту осуществления способ включает определение длины погрузочно-разгрузочной стрелы и определение перемещения выдвижения, когда длина погрузочно-разгрузочной стрелы увеличивается.
[34] Согласно одному варианту осуществления способ включает этап подачи сигнала, включающий отображение или передачу предупреждающего сигнала, если сигнал, относящийся к опрокидывающему моменту, выше фактической пороговой величины.
Краткое описание чертежей
[35] Изобретение будет лучше понято, а другие его задачи, детали, признаки и преимущества станут более очевидными из следующего описания нескольких конкретных вариантов осуществления изобретения, приведенных исключительно в иллюстративной и неограничивающей форму, со ссылкой на прилагаемые чертежи.
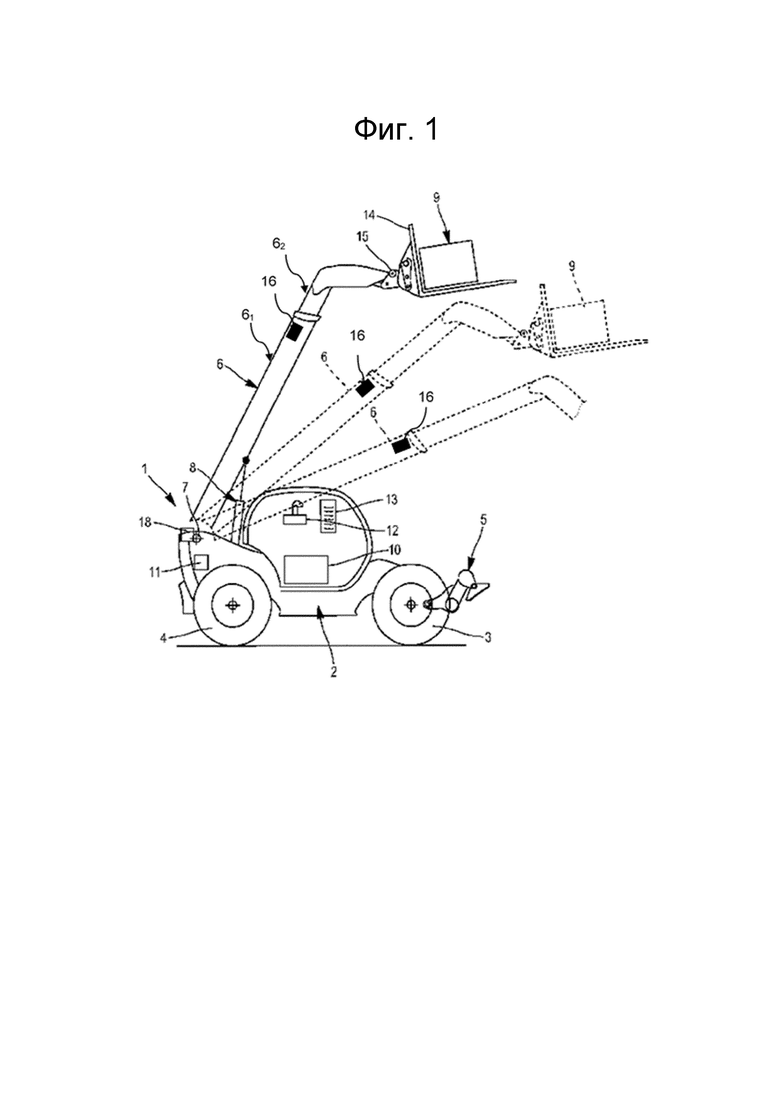
[36] На фиг. 1 схематически представлена погрузочно-разгрузочная машина.
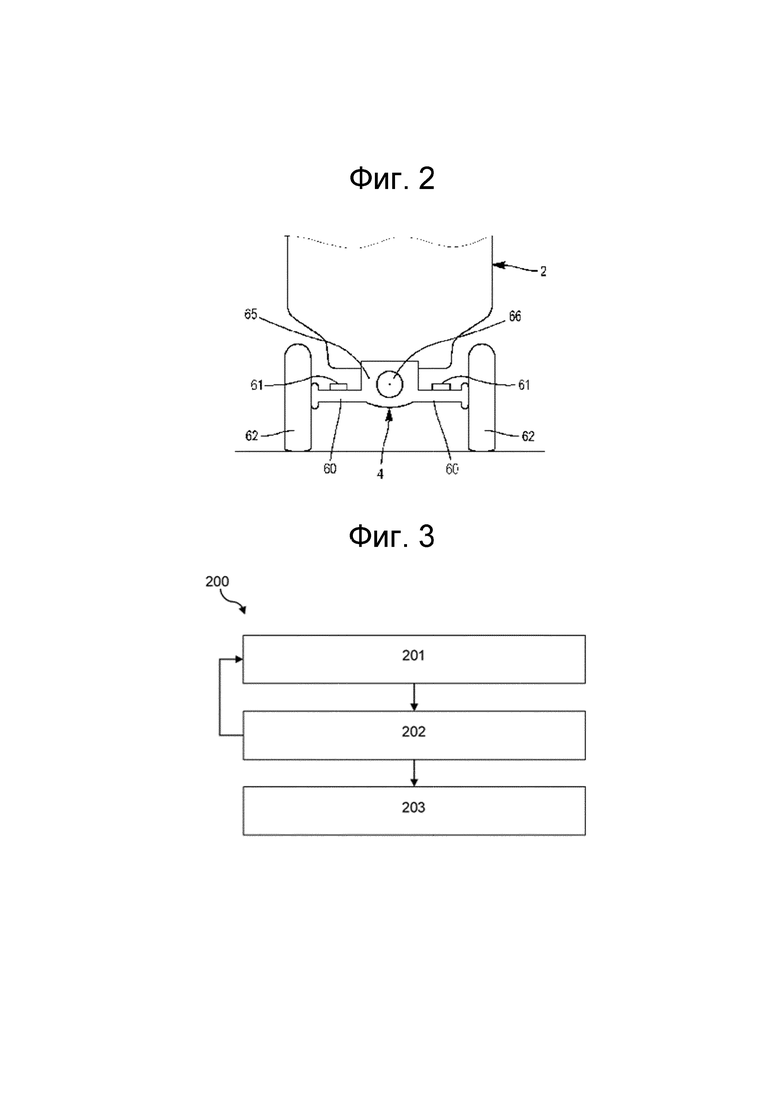
[37] На фиг. 2 представлено изображение датчика наклона, который может быть реализован в погрузочно-разгрузочной машине по фиг. 1.
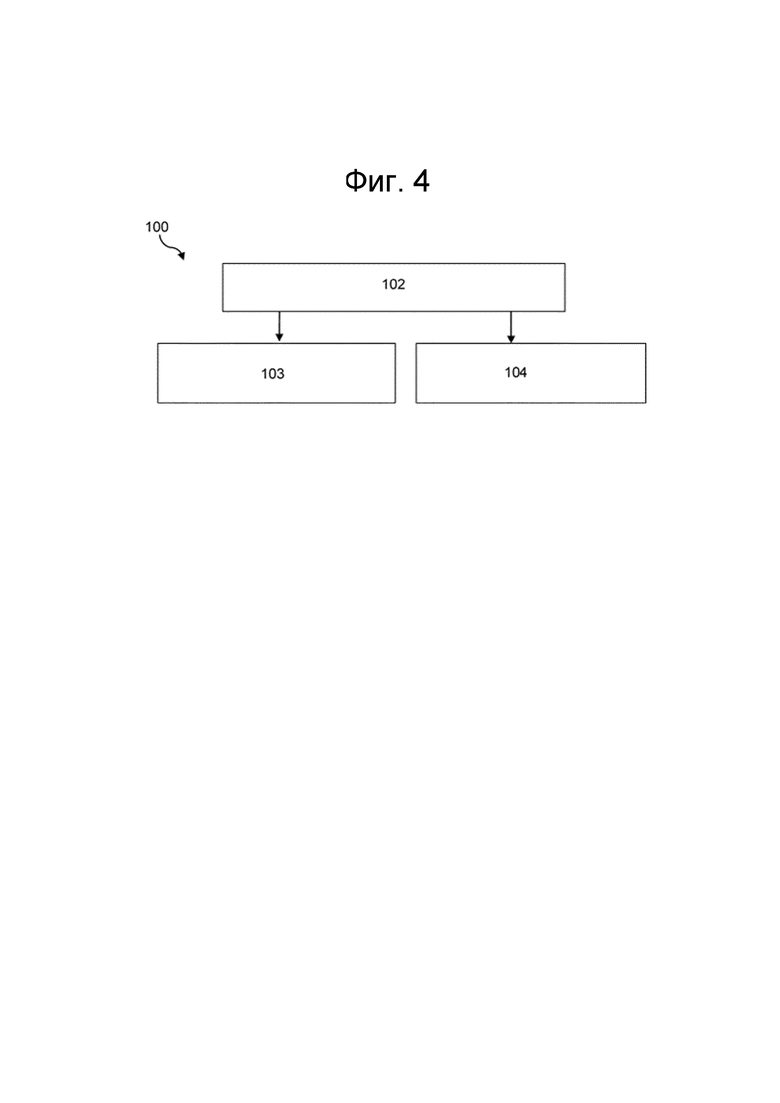
[38] На фиг. 3 схематически представлен способ управления, который может быть реализован с помощью погрузочно-разгрузочной машины по фиг. 1.
[39] На фиг. 4 схематически представлен способ определения фактической пороговой величины, который может быть реализован с помощью погрузочно-разгрузочной машины по фиг. 1.
Осуществление изобретения
[40] На фигуре 1 представлена погрузочно-разгрузочная машина 1 типа вилочного погрузчика. Погрузочно-разгрузочная машина 1 содержит шасси 2, поддерживаемое на земле с помощью передней оси 3 и задней оси 4. Погрузочно-разгрузочная машина 1 содержит погрузочно-разгрузочную стрелу 6 телескопического типа, установленную на шасси 2 и которая может быть ориентирована относительно оси 7 вращения, горизонтальной по отношению к шасси 2. Погрузочно-разгрузочная стрела 6 содержит грузозахватное приспособление 14, шарнирно закрепленное на погрузочно-разгрузочной стреле 6 посредством соединительного звена 15 и выполненное с возможностью переноса полезной нагрузки 9.
[41] Погрузочно-разгрузочная стрела 6 при вращении может смещаться цилиндром 8, соединенным с шасси 2 и с погрузочно-разгрузочной стрелой 6. Погрузочно-разгрузочная стрела 6 содержит по меньшей мере два сегмента 61 и 62, которые могут быть развернуты с помощью цилиндра выдвижения, который не показан, расположенного между по меньшей мере двумя сегментами 61 и 62.
[42] Погрузочно-разгрузочная машина 1 дополнительно содержит исполнительный элемент 12 погрузочно-разгрузочной стрелы 6, выполненный с возможностью приведения в действие погрузочно-разгрузочной стрелы 6 вручную, что позволяет поднимать и опускать, а также выпускать и втягивать погрузочно-разгрузочную стрелу 6.
[43] На фигуре 1 показана погрузочно-разгрузочная стрела 6, несущая полезную нагрузку 9 в верхнем и втянутом положении непрерывной линией и в нескольких нижних и выпущенных положениях пунктирными линиями. Статический опрокидывающий момент, создаваемый погрузочно-разгрузочной стрелой 6 в прямом направлении, увеличивается по мере ее опускания в горизонтальное положение и/или по мере увеличения длины погрузочно-разгрузочной стрелы 6.
[44] Погрузочно-разгрузочная машина 1 также содержит датчики 18 смещения, выполненные с возможностью выдачи сигнала, относящегося к положению погрузочно-разгрузочной стрелы 6, в частности, к углу наклона погрузочно-разгрузочной стрелы 6 относительно шасси 2 и/или длине выдвижения погрузочно-разгрузочной стрелы 6.
[45] Датчики 18 смещения содержат, например, первый датчик, расположенный на оси 7 и выполненный с возможностью измерения угла наклона погрузочно-разгрузочной стрелы 6. Датчики смещения выполнены с возможностью выдачи сигнала, характеризующего угол наклона погрузочно-разгрузочной стрелы 6 относительно шасси 2, в зависимости от данных первого датчика. Датчики 18 смещения содержат, например, второй датчик, расположенный на цилиндре выдвижения и выполненный с возможностью измерения перемещения указанного цилиндра выдвижения. Датчики 18 смещения выполнены с возможностью выдачи сигнала, характеризующего длину выдвижения погрузочно-разгрузочной стрелы 6 в зависимости от данных второго датчика.
[46] Датчики 18 смещения позволяют блоку 10 управления определять перемещение опускания и/или перемещение выдвижения погрузочно-разгрузочной стрелы 6. В частности, блок 10 управления определяет перемещение опускания погрузочно-разгрузочной стрелы 6 в ответ на уменьшение угла наклона. Аналогичным образом, блок 10 управления определяет перемещение выдвижения погрузочно-разгрузочной стрелы 6 в ответ на увеличение длины выдвижения погрузочно-разгрузочной стрелы 6, например, увеличение хода цилиндра выдвижения.
[47] Блок 10 управления определяет характер перемещения погрузочно-разгрузочной стрелы б. Для этого существует несколько способов. Например, блок 10 управления содержит средство обработки, выполненное с возможностью определения сигнала, характеризующего скорость вращения погрузочно-разгрузочной стрелы 6 в направлении оси 7. В этом варианте осуществления блок 10 управления определяет перемещение опускания, если скорость вращения ненулевая по отношению к земле. В частности, сигнал, относящийся к скорости вращения, может быть определен путем измерения расхода гидравлического питания в цилиндре 8. В качестве альтернативы сигнал, относящийся к скорости вращения, может быть определен как функция изменения во времени угла наклона погрузочно-разгрузочной стрелы 6. Кроме того, средство обработки выполнено с возможностью определения сигнала, характеризующего скорость выдвижения погрузочно-разгрузочной стрелы 6. В этом варианте осуществления, например, блок 10 управления определяет перемещение выдвижения, если скорость выдвижения не равна нулю в направлении в сторону от шасси 2. В частности, сигнал, относящийся к скорости выдвижения, может быть определен путем измерения расхода гидравлического питания в цилиндре выдвижения. В альтернативном варианте сигнал, относящийся к скорости выдвижения, может быть определен как функция изменения во времени длины погрузочно-разгрузочной стрелы 6.
[48] Погрузочно-разгрузочная машина 1 дополнительно содержит датчик 11 наклона, выполненный с возможностью подачи сигнала, относящегося к опрокидывающему моменту, приложенному к шасси 2 относительно оси наклона, находящейся на передней оси 3. При необходимости могут быть выпущены стабилизирующие опоры 5 для подъема передней оси 3, и в этом случае стабилизирующие опоры 5 определяют ось наклона.
[49] В одном варианте осуществления датчик 11 наклона расположен на цилиндре 8. В другом варианте осуществления, представленном на фигуре 2, датчик 11 наклона расположен на задней оси 4.
[50] На фигуре 2 задняя ось 4 погрузочно-разгрузочной машины 1 содержит два рычага 60 опоры колес, несущих задние колеса 62. Каждый рычаг 60 опоры колес содержит тензодатчик 61, выполненный с возможностью измерения деформации при растяжении указанного рычага 60 опоры колеса в направлении, перпендикулярном указанному рычагу 60. В качестве альтернативы тензодатчики 61 выполнены с возможностью измерения деформации изгиба рычага 60 опоры колеса, в частности, изменения длины между двумя границами, расположенными на расстоянии друг от друга на рычаге 60 опоры колеса. Измерительные сигналы от тензодатчиков 61 могут быть использованы для формирования сигнала, указывающего на опрокидывающий момент, например, в виде среднего значения двух измерительных сигналов. В качестве альтернативы можно использовать один тензодатчик 61 для получения сигнала, указывающего на опрокидывающий момент. Предпочтительно, задняя ось 4 шарнирно соединена с шасси 2 посредством поворотной опоры 66 продольной оси, проходящей через центральную часть 65 оси.
[51] Погрузочно-разгрузочная машина 1 дополнительно содержит блок 10 управления, выполненный с возможностью приема сигналов от датчика 11 наклона и от датчиков 18 смещения, и замедления, предотвращения или остановки перемещения погрузочно-разгрузочной стрелы 6, если сигнал, характеризующий опрокидывающий момент, выше фактической пороговой величины. Например, блок 10 управления выполнен с возможностью предотвращения или остановки перемещения погрузочно-разгрузочной стрелы 6 путем уменьшения или остановки перемещения погрузочно-разгрузочной стрелы 6 посредством уменьшения или остановки расхода гидравлической подачи цилиндра 8 и/или цилиндра выдвижения.
[52] Блок управления 10 также выполнен с возможностью:
присвоения порогового значения опускания указанной фактической пороговой величине при определении перемещения опускания погрузочно-разгрузочной стрелы 6;
присвоения порогового значения выдвижения указанной фактической пороговой величине при определении перемещения выдвижения погрузочно-разгрузочной стрелы 6 в сочетании с отсутствием перемещения опускания.
[53] Пороговое значение опускания ниже порогового значения выдвижения, так что пороговая величина опускания представляет собой меньший опрокидывающий момент, чем опрокидывающий момент, представленный пороговой величиной выдвижения. Другими словами, при подходе к пределу устойчивости погрузочно-разгрузочной машины, использующем опускание погрузочно-разгрузочной стрелы 6, в условиях опрокидывающего момента движение останавливается дальше от предела устойчивости, чем при подходе, использующем выдвижение погрузочно-разгрузочной стрелы 6 без опускания.
[54] Данная настройка учитывает тот факт, что силы инерции, действующие при прерывании перемещения опускания стрелы, оказывают большее влияние на устойчивость машины, чем силы инерции, действующие при прерывании перемещения выдвижения стрелы.
[55] Погрузочно-разгрузочная машина 1 содержит устройство 13 отображения, соединенное с блоком 10 управления и выполненное с возможностью отображения предупреждающего сигнала, если сигнал, относящийся к опрокидывающему моменту, выше фактической пороговой величины.
[56] В одном варианте осуществления погрузочно-разгрузочная машина содержит датчик 16 удлинения погрузочно-разгрузочной стрелы 6, выполненный с возможностью определения выдвижения погрузочно-разгрузочной стрелы 6.
[57] В другом варианте осуществления выдвижение погрузочно-разгрузочной стрелы специально не измеряется, и датчик выдвижения не требуется. В этом случае фактическая пороговая величина может быть определена на основе угла наклона погрузочно-разгрузочной стрелы без учета измерения выдвижения. Фактически, увеличение опрокидывающего момента погрузочно-разгрузочной машины без опускания погрузочно-разгрузочной стрелы в некоторых случаях может рассматриваться как неявное обнаружение того, что происходит выдвижение погрузочно-разгрузочной стрелы.
[58] В альтернативном варианте установка фактической пороговой величины может выполняться не в зависимости от перемещения стрелы, а в зависимости от запроса на перемещение стрелы, который блок управления получает от исполнительного элемента 12. В этом случае блок 10 управления (или датчик запроса на перемещение, не представленный на фигурах), связанный с исполнительным элементом 12, выполнен с возможностью определения перемещения, которое должно выполняться погрузочно-разгрузочной стрелой 6. В этом случае блок 10 управления может быть выполнен с возможностью:
присвоения порогового значения опускания указанной фактической пороговой величине при определении запроса на перемещение опускания погрузочно-разгрузочной стрелы 6;
присвоения порогового значения выдвижения указанной фактической пороговой величине при определении запроса на перемещение выдвижения погрузочно-разгрузочной стрелы 6 в сочетании с отсутствием перемещения опускания.
[59] Во всех случаях блок 10 управления может быть выполнен с возможностью реализации способа 200 управления погрузочно-разгрузочной машиной 1, как показано на фигуре 3.
[60] Способ 200 управления служит для замедления, предотвращения или остановки перемещения погрузочно-разгрузочной стрелы 6, чтобы избежать опрокидывания погрузочно-разгрузочной машины 1.
[61] Способ 200 включает:
этап 201 определения сигнала, относящегося к опрокидывающему моменту, которому подвергается шасси 2, например, путем определения удлинения задней оси 3,
этап 202 сравнения сигнала, относящегося к опрокидывающему моменту, с фактической пороговой величиной,
этап 203 замедления, остановки или предотвращения перемещения погрузочно-разгрузочной стрелы 6, когда сигнал, относящийся к опрокидывающему моменту, выше фактической пороговой величины.
[62] В одном варианте осуществления блок 10 управления выполнен с возможностью определения фактической пороговой величины путем реализации способа 100, представленного на фигуре 4.
[63] Способ 100 включает:
этап 102 определения сигнала, относящегося к углу наклона погрузочно-разгрузочной стрелы 6 относительно земли или относительно шасси машины, или относительно горизонтального ориентира, и определения сигнала, относящегося к длине выдвижения погрузочно-разгрузочной стрелы б
этап 103 присвоения порогового значения опускания фактической пороговой величине при определении уменьшения угла наклона погрузочно-разгрузочной стрелы 6,
этап 104 присвоения порогового значения выдвижения фактической пороговой величине при определении увеличения длины погрузочно-разгрузочной стрелы 6.
[64] В альтернативном варианте этап 102 может содержаться в этапе определения запроса на перемещение, относящегося к опусканию или подъему погрузочно-разгрузочной стрелы 6. Запрос на перемещение может быть определен путем определения конкретного приведения в действие исполнительного элемента, например, ориентации исполнительного элемента пользователем в заданном направлении. В этом случае этап 103 присвоения порогового значения опускания фактической пороговой величине выполняется при определении запроса на опускание погрузочно-разгрузочной стрелы, а этап 104 присвоения порогового значения выдвижения фактической пороговой величине выполняется при определении запроса на выдвижение погрузочно-разгрузочной стрелы 6.
[65] Пороговые величины опускания и выдвижения выбирают таким образом, чтобы опрокидывающий момент, представленный пороговой величиной опускания, был меньше, чем опрокидывающий момент, представленный пороговой величиной выдвижения.
[66] Согласно одному варианту осуществления пороговая величина опускания и/или пороговая величина выдвижения предварительно определены и хранятся в таблице или базе данных. В частности, пороговая величина опускания и/или пороговая величина выдвижения могут быть постоянными или переменными.
[67] Согласно одному варианту осуществления пороговая величина опускания и пороговая величина выдвижения предпочтительно являются переменными в зависимости от выпуска или невыпуска стабилизирующих опор 5.
[68] Некоторые представленные элементы, в частности блок управления, могут быть изготовлены в различных формах, одновременно или распределенно, с помощью аппаратных и/или программных компонентов. Аппаратные компоненты, которые могут быть использованы, представляют собой пользовательские интегральные схемы ASIC, программируемые логические массивы FPGA или микропроцессоры. Программные компоненты могут быть написаны на разных языках программирования, например, С, С++, Java или VHDL. Этот список не является исчерпывающим.
[69] Хотя изобретение было описано в отношении нескольких конкретных вариантов осуществления, совершенно очевидно, что оно никоим образом не ограничивается этим и что оно охватывает все технические эквиваленты описанных средств, а также их комбинации при условии, что последние подпадают под контекст настоящего изобретения.
[70] Использование глагола «содержит» или «включает» и его сопряженных форм не исключает наличия элементов или этапов, отличных от тех, которые указаны в формуле изобретения.
[71] В формуле изобретения любой ссылочный символ между круглыми скобками не должен интерпретироваться как ограничение формулы изобретения.
Изобретение относится к погрузочным устройствам. Погрузочно-разгрузочная машина (1) содержит датчик (11) наклона, выполненный с возможностью выдачи сигнала, относящегося к опрокидывающему моменту, приложенному к основному корпусу относительно оси наклона, датчики (18) смещения, выполненные с возможностью выдачи сигнала, относящегося к перемещениям погрузочно-разгрузочной стрелы относительно основного корпуса, и блок (10) управления, выполненный с возможностью предотвращения или остановки перемещения погрузочно-разгрузочной стрелы, если сигнал, характеризующий опрокидывающий момент, превышает фактическую пороговую величину присвоения порогового значения опускания фактической пороговой величине в ответ на определение перемещения опускания погрузочно-разгрузочной стрелы, и присвоения порогового значения выдвижения фактической пороговой величине в ответ на определение перемещения выдвижения погрузочно-разгрузочной стрелы. Достигается обеспечение большего рабочего пространства для погрузочно-разгрузочной стрелы без риска опрокидывания машины. 2 н. и 7 з.п. ф-лы, 4 ил.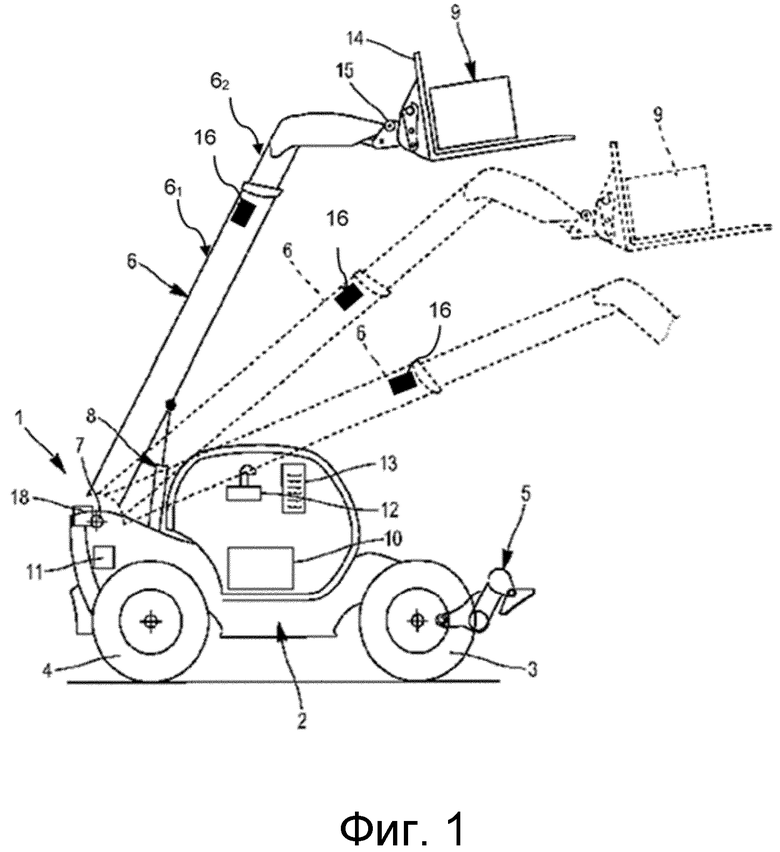
1. Погрузочно-разгрузочная машина (1), содержащая:
основной корпус (2),
телескопическую погрузочно-разгрузочную стрелу (6), которая установлена на указанном основном корпусе, выполнена с возможностью смещения при вращении вокруг горизонтальной оси (7) вращения и выполнена с возможностью выпуска и втягивания в продольном направлении указанной погрузочно-разгрузочной стрелы,
исполнительные механизмы (8), выполненные с возможностью подъема и опускания, а также выпуска и втягивания указанной погрузочно-разгрузочной стрелы;
датчик (11) наклона, выполненный с возможностью выдачи сигнала, относящегося к опрокидывающему моменту, приложенному к основному корпусу относительно оси наклона указанной погрузочно-разгрузочной машины;
датчики (18) смещения или датчики запроса на смещение, выполненные с возможностью выдачи сигнала, относящегося к перемещениям или запросам на перемещение погрузочно-разгрузочной стрелы относительно основного корпуса; и
блок (10) управления, выполненный с возможностью приема сигналов от датчика наклона и от датчиков смещения или датчиков запроса на смещение и:
замедления, предотвращения или остановки (203) перемещения погрузочно-разгрузочной стрелы, если сигнал, характеризующий опрокидывающий момент, выше фактической пороговой величины;
присвоения (103) порогового значения опускания указанной фактической пороговой величине в ответ на определение перемещения опускания погрузочно-разгрузочной стрелы или запроса на перемещение опускания;
присвоения (104) порогового значения выдвижения указанной фактической пороговой величине в ответ на явное или неявное определение перемещения погрузочно-разгрузочной стрелы или запроса на перемещение выдвижения;
при этом пороговое значение опускания ниже порогового значения выдвижения.
2. Машина по п. 1, в которой блок (10) управления выполнен с возможностью присвоения порогового значения опускания фактической пороговой величине в ответ на одновременное определение перемещения опускания и выдвижения или запроса на перемещение погрузочно-разгрузочной стрелы.
3. Машина по п. 1 или 2, в которой пороговая величина опускания и/или пороговая величина выдвижения предварительно заданы.
4. Машина по любому из пп. 1-3, в которой датчики (18) смещения содержат датчик угла, выполненный с возможностью измерения угла наклона погрузочно-разгрузочной стрелы (6) относительно горизонтальной плоскости или относительно основного корпуса (2) погрузочно-разгрузочной машины.
5. Машина по п. 4, в которой блок (10) управления выполнен с возможностью обнаружения уменьшения угла наклона, измеренного датчиком угла, и определения перемещения опускания указанной погрузочно-разгрузочной стрелы в ответ на уменьшение угла наклона.
6. Машина по любому из пп. 1-5, в которой датчики (18) смещения содержат датчик длины, выполненный с возможностью измерения диапазона выдвижения погрузочно-разгрузочной стрелы.
7. Машина по п. 6, в которой блок (10) управления выполнен с возможностью обнаружения увеличения длины погрузочно-разгрузочной стрелы и определения перемещения выдвижения указанной погрузочно-разгрузочной стрелы в ответ на увеличение длины погрузочно-разгрузочной стрелы.
8. Машина по любому из пп. 1-7, в которой погрузочно-разгрузочная стрела (6) выполнена с возможностью ориентирования вокруг оси, поперечной основному корпусу, расположенной на первом конце погрузочно-разгрузочной стрелы (6), а основной корпус установлен на колесах, поддерживаемых осями, и
в которой датчик наклона содержит тензодатчик, расположенный на оси, противоположной второму концу погрузочно-разгрузочной стрелы (6), а сигнал, относящийся к опрокидывающему моменту, является сигналом, относящимся к деформации оси, противоположной второму концу погрузочно-разгрузочной стрелы (6).
9. Способ управления погрузочно-разгрузочной машиной (1), содержащей основной корпус и телескопическую погрузочно-разгрузочную стрелу (6), которая установлена на указанном основном корпусе (2), выполнена с возможностью смещения при вращении вокруг горизонтальной оси вращения и выполнена с возможностью выпуска и втягивания в продольном направлении указанной погрузочно-разгрузочной стрелы, причем указанный способ включает:
определение (201) сигнала, относящегося к опрокидывающему моменту, приложенному к основному корпусу относительно оси опрокидывания указанной машины;
определение (102) сигнала, относящегося к перемещениям или запросам на перемещение погрузочно-разгрузочной стрелы относительно основного корпуса;
замедление, предотвращение или остановку (203) перемещения погрузочно-разгрузочной стрелы, если сигнал, характеризующий опрокидывающий момент, выше фактической пороговой величины;
присвоение (103) порогового значения опускания указанной фактической пороговой величине в ответ на определение перемещения опускания или запроса на перемещение опускания погрузочно-разгрузочной стрелы;
присвоение (104) порогового значения выдвижения указанной фактической пороговой величине в ответ на явное или неявное определение перемещения выдвижения погрузочно-разгрузочной стрелы;
при этом пороговое значение опускания ниже порогового значения выдвижения.
| Машина подметально-уборочная прицепная | 2015 |
|
RU2616382C1 |
| БУМАЖНО-СЛОИСТЫЙ ПЛАСТИК (ВАРИАНТЫ) | 2013 |
|
RU2520536C1 |
| WO 2012065157 A1, 18.05.2012 | |||
| АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ КРАН | 1993 |
|
RU2034772C1 |
