[0001] Настоящее изобретение относится к погрузочно-разгрузочной машине, такой как машина с телескопической или нетелескопической подъемной стрелой, экскаватор, ковшовый погрузчик и т.п., и к способу управления погрузочно-разгрузочной машиной.
[0002] В частности, оно относится к погрузочно-разгрузочной машине, содержащей:
- колесное шасси,
- приводную систему, приводящую в движение колесное шасси,
- систему обработки груза, расположенную на шасси,
- управляющий блок,
- устройство управления для управления системой обработки груза, которое выполнено с возможностью приведения в действие оператором вручную, причем управляющий блок выполнен с возможностью приема управляющих сигналов от указанного устройства управления,
- элемент активации для указанного приводимого в действие вручную устройства управления.
[0003] Из соображений безопасности правила предписывают принятие мер для предотвращения случайного срабатывания устройства управления на погрузочно-разгрузочных машинах. В качестве примера случайное срабатывание может быть вызвано зацеплением одежды оператора за устройство управления, так что оператор управляет им непреднамеренно или неосознанно. Для решения этой проблемы разработаны погрузочно-разгрузочные машины, содержащие элемент активации, приводящий в действие устройство управления, во избежание случайного срабатывания с использованием устройства управления, как показано в патентах EP-0.981.078 и EP-1.523.704. Однако наличие такого элемента активации накладывает ограничения на оператора. Когда оператор больше не приводит в действие элемент активации, оператор должен почти непрерывно приводить в действие устройство управления. Сразу после того, как устройство управления не приводится в действие в течение заданного периода, элемент активации должен быть приведен в действие снова. На практике наличие этого элемента активации, в частности, обязывает оператора поддерживать почти постоянный контакт руки с элементом активации, что делает управление машиной менее удобным и может привести к мышечной усталости. В патенте EP 1 953027 также описано устройство для управления погрузочно-разгрузочной машиной, которое учитывает закрытое или открытое состояние двери кабины машины.
[0004] Целью изобретения является создание погрузочно-разгрузочной машины вышеупомянутого типа, конструкция которой позволяет избегать нежелательного приведения в действие устройства управления без ущерба для удобства управления машиной.
[0005] В этом отношении одним объектом изобретения является погрузочно-разгрузочная машина, содержащая:
- колесное шасси,
- приводную систему, приводящую в движение колесное шасси,
- систему обработки груза, расположенную на шасси,
- управляющий блок,
- устройство управления для управления системой обработки груза, которое выполнено с возможностью приведения в действие оператором вручную, причем управляющий блок выполнен с возможностью приема управляющих сигналов от указанного устройства управления,
- элемент активации для указанного приводимого в действие вручную устройства управления,
отличающаяся тем, что погрузочно-разгрузочная машина содержит датчик, определяющий параметр, указывающий на движение машины, и управляющий блок выполнен с возможностью обеспечения управления системой обработки груза с использованием устройства управления в зависимости по меньшей мере от параметра, указывающего на движение машины. Таким образом, можно обеспечить возможность управления системой обработки груза с использованием устройства управления в зависимости по меньшей мере от параметра, указывающего на движение машины, при нахождении элемента активации в приведенном в действие состоянии или в неприведенном в действие состоянии. Это делает вождение более удобным, но без ущерба для безопасности.
[0006] Согласно одному варианту осуществления изобретения управляющий блок выполнен таким образом, что при нахождении элемента активации устройства управления в неприведенном в действие состоянии указанный блок обеспечивает возможность управления системой обработки груза с использованием устройства управления в зависимости по меньшей мере от параметра, указывающего на движение машины.
[0007] Согласно одному варианту осуществления изобретения управляющий блок выполнен таким образом, что когда элемент активации устройства управления находится в неприведенном в действие состоянии, причем элемент активации находится в неприведенном в действие состоянии в результате перехода указанного элемента активации из приведенного в действие состояния в неприведенное в действие состояние, указанный блок обеспечивает возможность управления системой обработки груза с использованием устройства управления в зависимости по меньшей мере от параметра, указывающего на движение машины.
[0008] Согласно одному варианту осуществления изобретения датчик параметра, указывающего на движение машины, является датчиком параметра, указывающего на скорость передвижения машины, при этом машина содержит память для хранения заданной скорости передвижения машины, и управляющий блок выполнен таким образом, что при нахождении элемента активации устройства управления в неприведенном в действие состоянии указанный блок обеспечивает возможность управления системой обработки груза с использованием устройства управления, когда скорость передвижения машины, передаваемая датчиком параметра, указывающего на скорость передвижения машины, больше заданного значения, хранящегося в памяти.
[0009] Когда датчик параметра, указывающего на движение машины, является датчиком параметра, указывающего на скорость передвижения машины, управляющий блок, следовательно, выполнен таким образом, что когда элемент активации устройства управления находится в неприведенном в действие состоянии, причем элемент активации находится в неприведенном в действие состоянии в результате перехода указанного элемента активации из приведенного в действие состояния в неприведенное в действие состояние, указанный блок обеспечивает возможность управления системой обработки груза с использованием устройства управления в зависимости по меньшей мере от параметра, указывающего на скорость передвижения машины. Таким образом, можно обеспечить возможность управления системой обработки груза с использованием устройства управления в зависимости по меньшей мере от скорости передвижения машины при нахождении элемента активации в приведенном в действие состоянии или в неприведенном в действие состоянии. Это делает вождение более удобным, но без ущерба для безопасности.
[0010] Таким образом, во время операций управления перемещением машины оператор может не беспокоиться об элементе активации.
[0011] Согласно одному варианту осуществления изобретения, когда управляющий блок выполнен таким образом, что при нахождении элемента активации в приведенном в действие состоянии указанный блок обеспечивает возможность управления системой обработки груза в зависимости по меньшей мере от управляющих сигналов, принятых от устройства управления, управляющий блок выполнен с возможностью:
- запуска по меньшей мере одного таймера, задающего временной интервал перехода элемента активации из приведенного в действие состояния в неприведенное в действие состояние,
- предотвращения управления системой обработки груза с использованием устройства управления по истечении временного интервала, заданного таймером, и
- сброса таймера в зависимости по меньшей мере от данных, переданных датчиком параметра, указывающего на движение машины, в течение временного интервала, заданного таймером. Следует отметить, что в настоящей заявке под "сбросом" понимается действие по возврату таймера до полного истечения временного интервала, заданного таймером, в начальное состояние, соответствующее запуску таймера.
[0012] Таким образом, управляющий блок выполнен с возможностью сброса таймера до полного истечения временного интервала, заданного таймером, в зависимости по меньшей мере от данных, переданных датчиком движения. Таким образом, сброс или отсутствие сброса таймера зависит по меньшей мере от движения машины.
[0013] Функция, посредством которой управляющий блок может сбрасывать таймер, а именно заставлять временной интервал, заданный таймером, снова истекать с начала, в зависимости от данных, переданных датчиком скорости движения, а именно скорости хода погрузочно-разгрузочной машины, означает, что оператору не нужно заниматься приведением в действие элемента активации и устройства управления по меньшей мере во время определенных операций эксплуатации, что не наносит ущерба безопасности. Это делает вождение более комфортным для оператора. Таким образом, во время этих операций эксплуатации оператор может располагать свою руку по своему усмотрению без необходимости, как это было в известном уровне техники, удержания руки в положении приведения в действие элемента активации или почти непрерывного приведения в действие устройства управления.
[0014] Согласно одному варианту осуществления изобретения, когда датчик параметра, указывающего на движение машины, является датчиком параметра, указывающего на скорость передвижения машины, управляющий блок выполнен с возможностью сброса таймера, когда скорость передвижения машины, передаваемая датчиком параметра, указывающего на скорость передвижения машины, больше заданной скорости, хранящейся в памяти. Следовательно, управляющий блок выполнен с возможностью сброса таймера до полного истечения временного интервала, заданного таймером, когда скорость передвижения машины больше, чем заданная скорость, хранящаяся в памяти. Таким образом, когда скорость передвижения машины превышает заданное значение, оператору не нужно беспокоиться об элементе активации устройства управления, и он не обязан, как это было в известном уровне техники, почти непрерывно приводить в действие элемент активации который активирует устройство управления для обеспечения возможности управления системой обработки груза с использованием устройства управления.
[0015] Согласно одному варианту осуществления изобретения управляющий блок выполнен с возможностью сброса таймера в зависимости по меньшей мере от управляющих сигналов, принятых от устройства управления. Следовательно, управляющий блок выполнен с возможностью сброса таймера до полного истечения временного интервала, заданного таймером, в зависимости по меньшей мере от управляющих сигналов, принятых от устройства управления. Таким образом, при нахождении элемента активации в неприведенном в действие состоянии управление системой обработки груза с использованием, то есть при помощи или посредством, устройства управления остается возможным при условии нахождения устройства управления приведенным в действие в течение временного интервала, заданного таймером.
[0016] Согласно одному варианту осуществления изобретения устройство управления, которое управляет системой обработки груза, представляет собой устройство управления, содержащее по меньшей мере два элемента управления.
[0017] Согласно одному варианту осуществления изобретения устройство управления для управления системой обработки груза является многоцелевым устройством управления, и по меньшей мере один из элементов управления выполнен с возможностью управления по меньшей мере частью системы обработки груза, а другой элемент управления или другой из элементов управления выполнен с возможностью управления по меньшей мере частью приводной системы, приводящей в движение машину.
[0018] Согласно одному варианту осуществления изобретения один из элементов управления устройства управления для управления системой обработки груза представляет собой рычаг, а другие элементы управления находятся на указанном рычаге.
[0019] Согласно одному варианту осуществления изобретения элемент активации расположен на устройстве управления для управления системой обработки груза. Таким образом, на практике расположение руки оператора на устройстве управления может обеспечивать возможность и приведения в действие устройства управления, и приведения в действие элемента активации, приводящего в действие устройство управления.
[0020] Согласно одному варианту осуществления изобретения устройство управления содержит ручную часть, выполненную с возможностью ее захвата рукой, а элемент активации представляет собой датчик присутствия, расположенный на ручной части устройства управления. Таким образом, датчик присутствия, расположенный на указанной ручной части, образует датчик, который обнаруживает присутствие руки оператора на указанном устройстве управления в состоянии, в котором устройство управления захвачено рукой в соответствии с его назначением.
[0021] Согласно одному варианту осуществления изобретения система обработки груза содержит по меньшей мере одну стрелу для перемещения груза, установленную на указанном шасси с возможностью поворота вокруг горизонтальной оси вращения, и по меньшей мере один исполнительный механизм, приводящий указанную стрелу для перемещения груза в движение вокруг указанной горизонтальной оси вращения.
[0022] Согласно одному варианту осуществления изобретения машина содержит место управляющего оператора, которое оборудовано системой обнаружения, обеспечивающей возможность обнаружения присутствия или отсутствия оператора на указанном месте, причем эта система обнаружения содержит по меньшей мере один датчик присутствия, выполненный с возможностью обнаружения присутствия оператора по меньшей мере в одном положении указанного места управляющего оператора, и управляющий блок выполнен таким образом, что при нахождении элемента активации в неприведенном в действие состоянии после перехода элемента активации из приведенного в действие состояния в неприведенное в действие состояние указанный блок предотвращает или обеспечивает возможность управления по меньшей мере системой обработки груза с использованием устройства управления в зависимости по меньшей мере от состояния присутствия оператора или отсутствия оператора, обнаруженного системой обнаружения присутствия оператора на указанном месте.
[0023] Согласно одному варианту осуществления изобретения место управляющего оператора имеет форму кабины оператора, внутри которой имеется по меньшей мере одно сиденье, на котором оператор может сидеть, причем указанная кабина оператора закрывается дверью, а сиденье оборудовано датчиком присутствия или по меньшей мере одним из датчиков присутствия системы обнаружения присутствия оператора на указанном месте.
[0024] Согласно одному варианту осуществления изобретения система обнаружения присутствия оператора на указанном месте содержит по меньшей мере один датчик обнаружения открытия и/или закрытия двери.
[0025] Согласно одному варианту осуществления изобретения управляющий блок выполнен с возможностью запуска по меньшей мере одного дополнительного таймера, называемого таймером присутствия, задающего временной интервал, в течение которого элемент активации переходит из приведенного в действие состояния в неприведенное в действие состояние, и с возможностью предотвращения управления системой обработки груза с использованием устройства управления по истечении интервала времени, заданного таймером присутствия, а управляющий блок выполнен с возможностью сброса таймера присутствия в зависимости по меньшей мере от состояния отсутствия или присутствия оператора, обнаруженного системой обнаружения присутствия оператора на указанном месте. Таким образом, управляющий блок выполнен с возможностью сброса таймера присутствия до полного истечения временного интервала, заданного таймером, в зависимости по меньшей мере от состояния отсутствия или присутствия оператора, обнаруженного системой обнаружения присутствия оператора на указанном месте. Это приводит к возможности быстрого обнаружения отсутствия оператора и предотвращения какого-либо сброса таймера при обнаружении отсутствия оператора.
[0026] Еще одним объектом изобретения является способ управления погрузочно-разгрузочной машиной, содержащей:
- колесное шасси,
- приводную систему, приводящую в движение колесное шасси,
- систему обработки груза, расположенную на шасси,
- управляющий блок,
- устройство управления для управления системой обработки груза, которое выполнено с возможностью приведения в действие оператором вручную, причем управляющий блок выполнен с возможностью приема управляющих сигналов от указанного устройства управления,
- элемент активации для указанного приводимого в действие вручную устройства управления, причем указанный способ включает этап ручного приведения в действие элемента активации, который приводит в действие устройство управления, таким образом, чтобы при нахождении элемента активации в приведенном в действие состоянии обеспечивать возможность управления системой обработки груза в зависимости по меньшей мере от управляющих сигналов, принятых от устройства управления, отличающийся тем, что, когда погрузочно-разгрузочная машина содержит датчик параметра, указывающего на движение машины, указанный способ включает этап авторизации управления системой обработки груза с использованием устройства управления в зависимости по меньшей мере от параметра, указывающего на движение машины.
[0027] Согласно одному варианту осуществления способа, когда датчик параметра, указывающего на движение машины, является датчиком параметра, указывающего на скорость передвижения машины, и когда машина содержит память для хранения заданной скорости передвижения машины, при нахождении элемента активации устройства управления в неприведенном в действие состоянии в результате перехода элемента активации из приведенного в действие состояния в неприведенное в действие состояние обеспечена возможность управления системой обработки груза с использованием устройства управления, когда скорость передвижения машины больше заданного значения, хранящегося в памяти.
[0028] Согласно одному варианту осуществления способа способ включает:
- этап запуска таймера, задающего временной интервал перехода элемента активации из приведенного в действие состояния в неприведенное в действие состояние,
- этап предотвращения управления системой обработки груза с использованием устройства управления по истечении временного интервала, заданного таймером,
- этап сброса таймера в зависимости от данных, переданных датчиком параметра, указывающего на движение машины, в течение временного интервала, заданного таймером.
[0029] Следовательно, способ включает до полного истечения временного интервала, заданного таймером, этап сброса таймера в зависимости от данных, переданных датчиком параметра, указывающего на движение машины, таким как датчик параметра, указывающего на скорость передвижения машины.
[0030] Согласно одному варианту осуществления способ включает этап сброса таймера в зависимости от управляющих сигналов, принятых от устройства управления.
Краткое описание чертежей
[0031] Настоящее изобретение может быть ясно понято на основании прочтения нижеследующего описания примерных вариантов осуществления со ссылкой на сопроводительные чертежи, на которых:
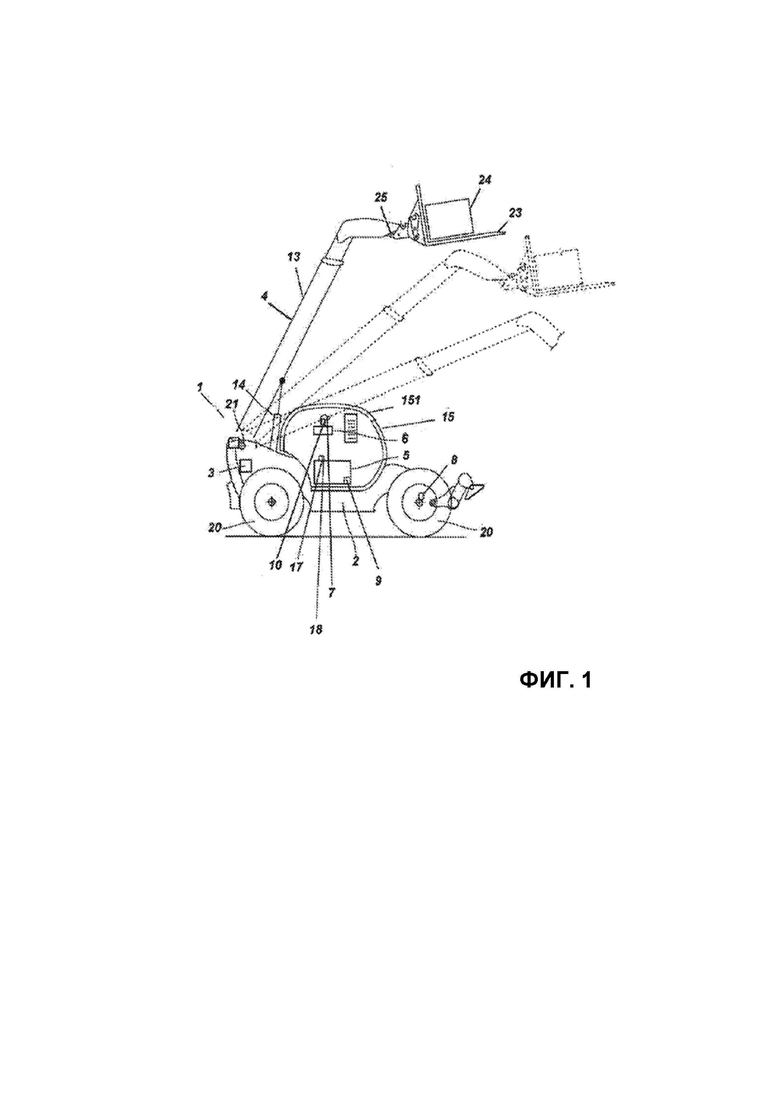
[0032] [Фиг. 1] изображает схематический вид погрузочно-разгрузочной машины в соответствии с изобретением с подъемной стрелой в поднятом положении;
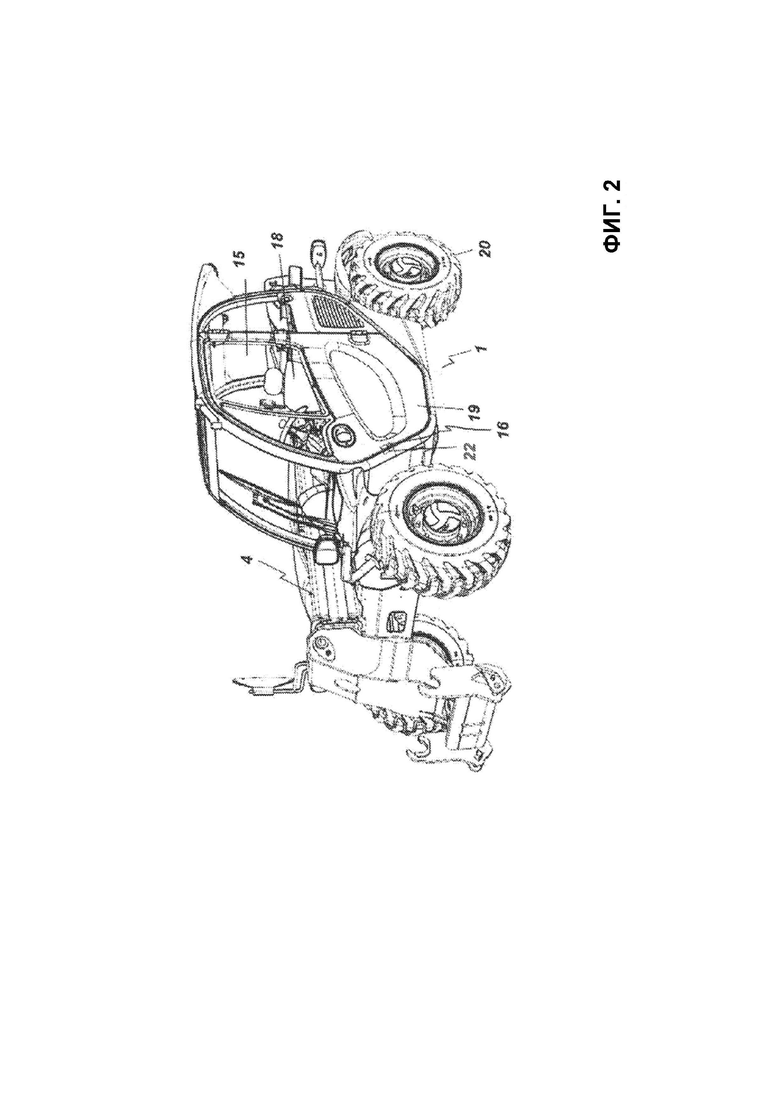
[0033] [Фиг. 2] изображает вид в перспективе погрузочно-разгрузочной машины в соответствии с изобретением с подъемной стрелой в опущенном положении;
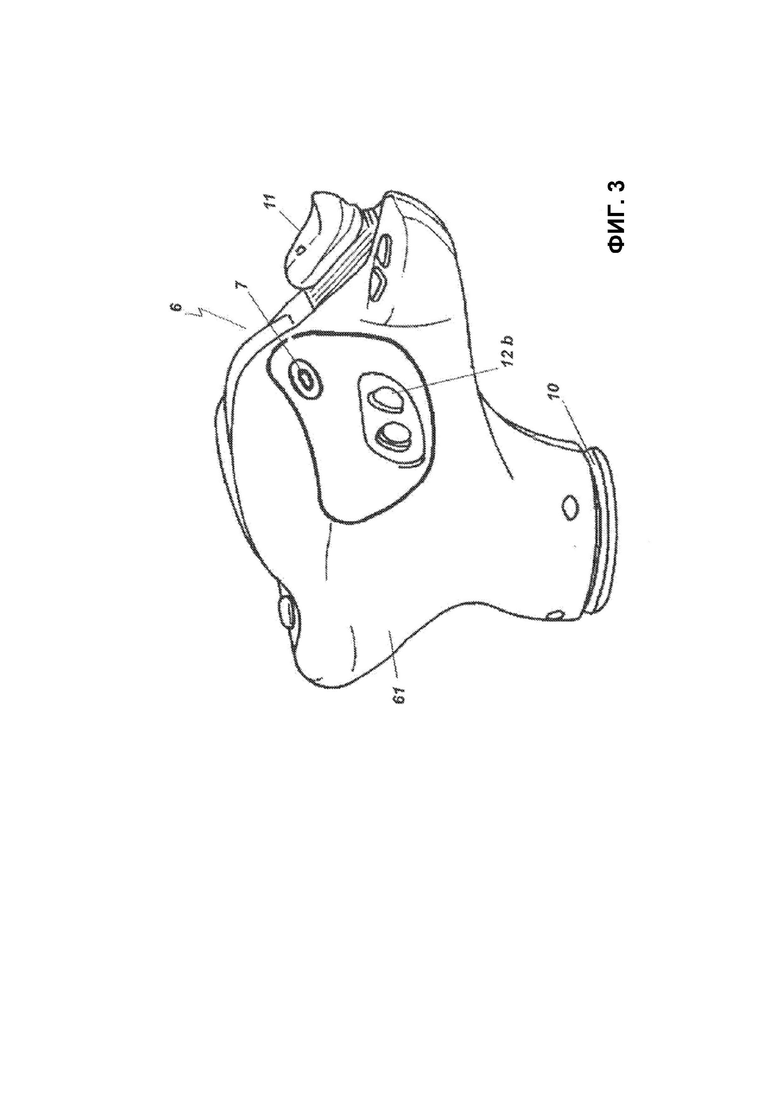
[0034] [Фиг. 3] изображает частичный вид устройства управления со стороны элемента активации;
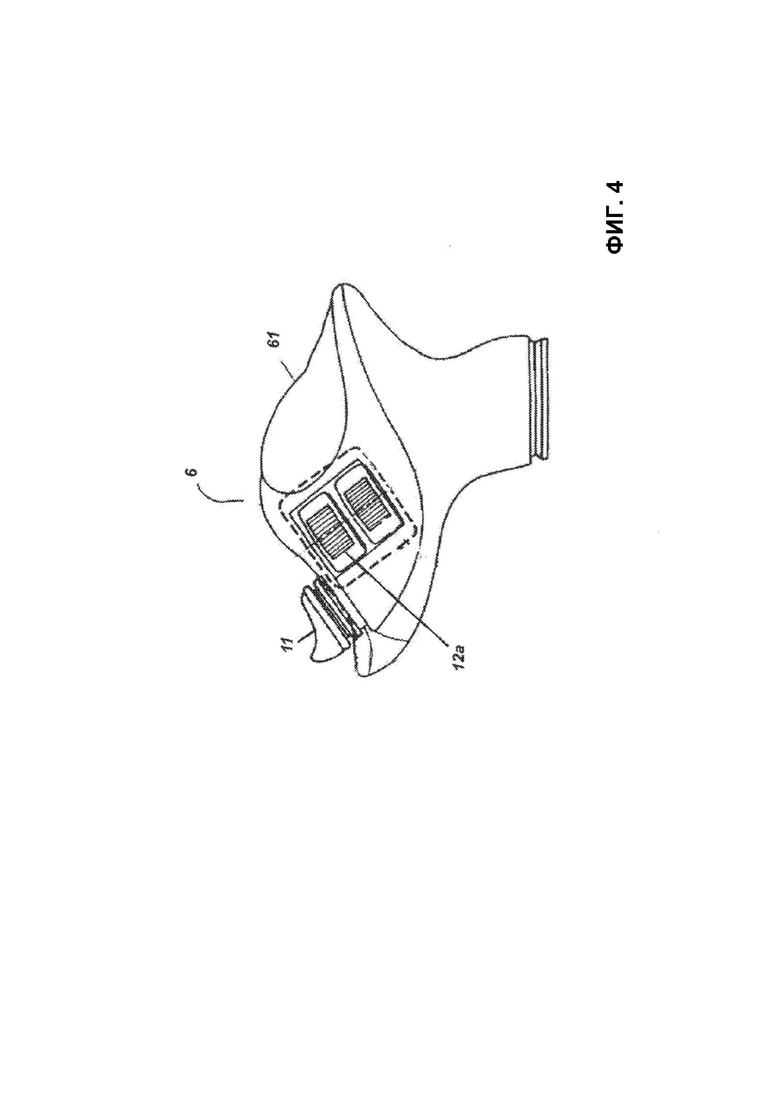
[0035] [Фиг. 4] изображает частичный вид устройства управления со стороны, противоположной стороне элемента активации;
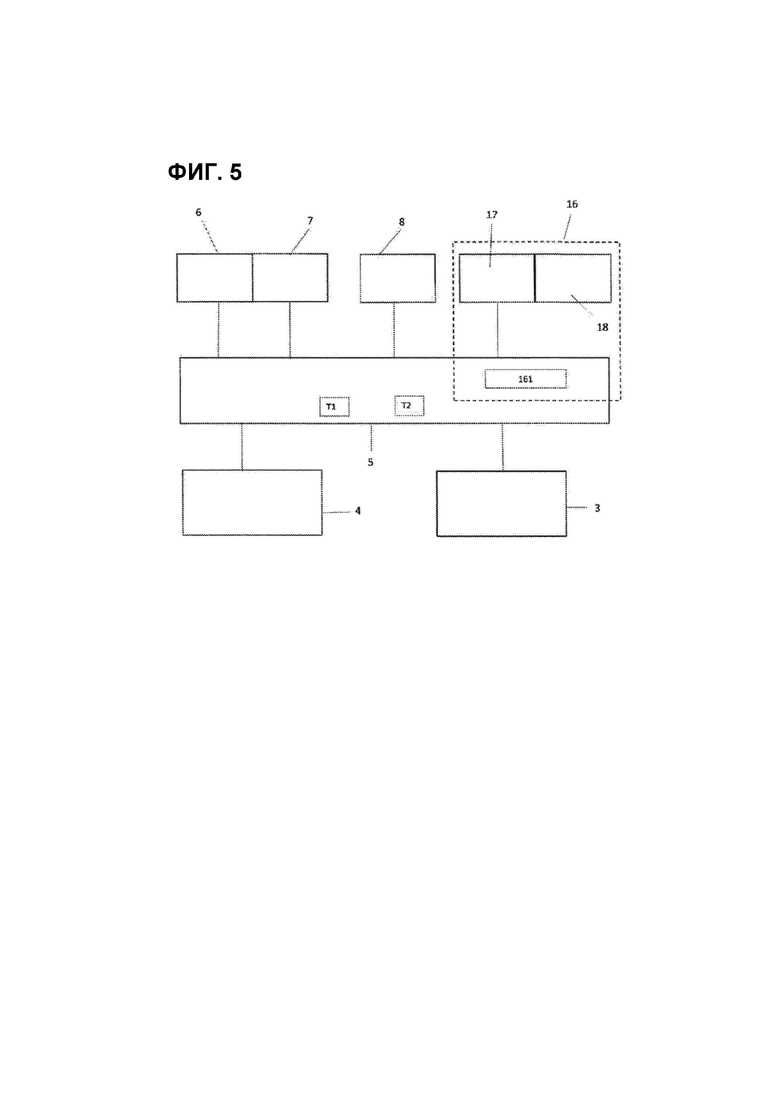
[0036] [Фиг. 5] схематически изображает элементы машины;
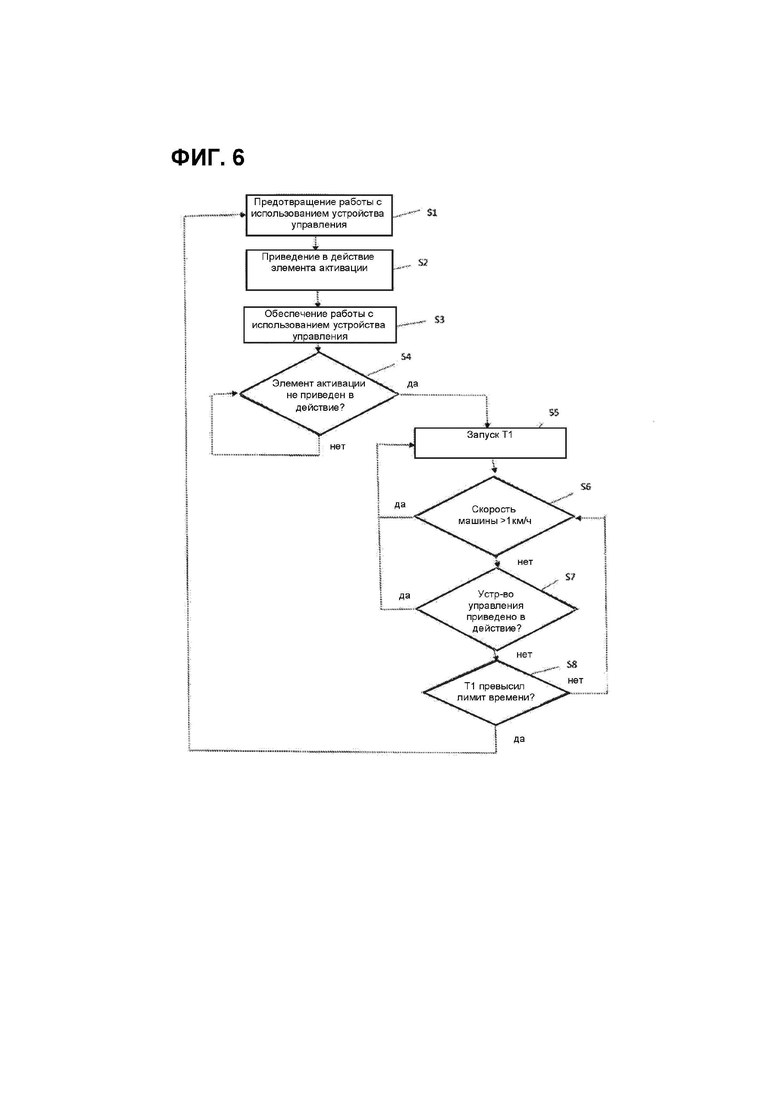
[0037] [Фиг. 6] схематически изображает способ управления, который может быть реализован посредством погрузочно-разгрузочной машины по Фиг. 1;
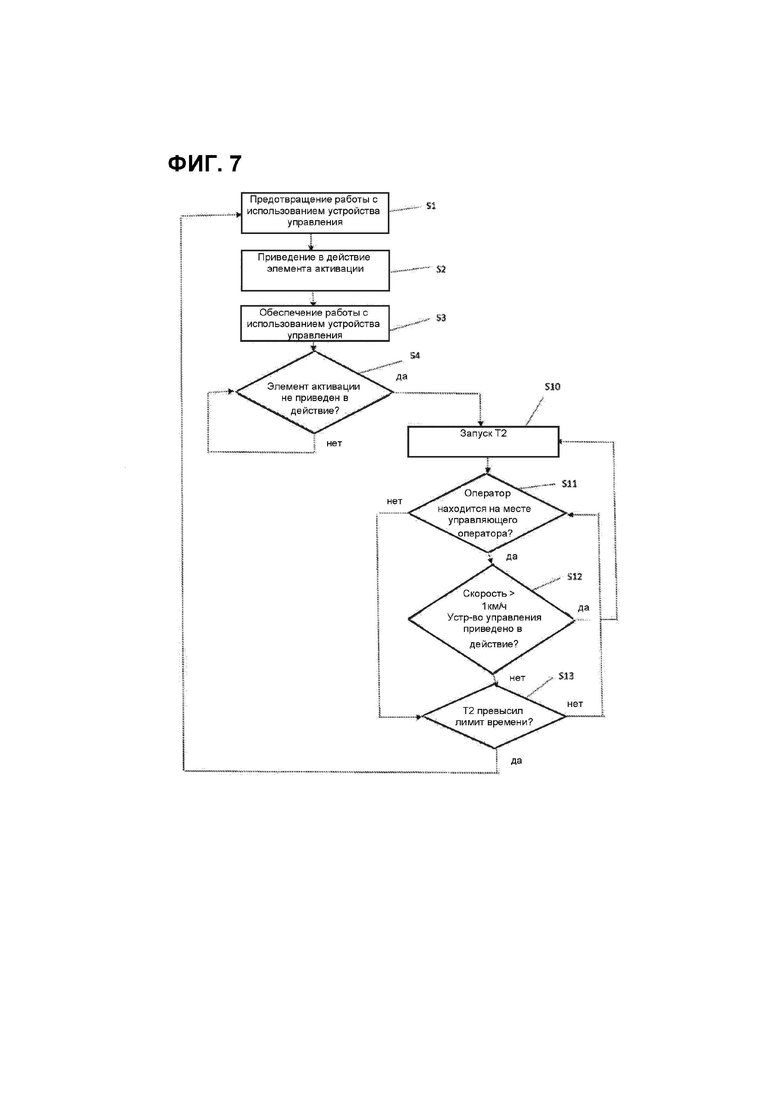
[0038] [Фиг. 7] схематически изображает способ управления, который может быть реализован посредством погрузочно-разгрузочного устройства по Фиг. 1.
[0039] Концепция изобретения описана более подробно ниже со ссылкой на сопроводительные чертежи, которые показывают варианты осуществления концепции изобретения. В настоящем описании ссылка на "один вариант осуществления" означает, что конкретная функциональная возможность, конструкция, материал или признак, описанные в связи с вариантом осуществления изобретения, включены по меньшей мере в один вариант осуществления настоящего изобретения. Таким образом, появление выражения "в одном варианте осуществления" в разных местах настоящего описания необязательно означает ссылку на один и тот же вариант осуществления. Более того, конкретные функциональные возможности, конструкции или признаки могут быть объединены любым подходящим образом в одном или более вариантах осуществления.
[0040] Как указано выше, изобретение относится к погрузочно-разгрузочной машине 1, изображенной на Фиг. 1. Эта машина 1 содержит шасси 2, оснащенное колесами 20 для опоры на землю с образованием колесного шасси 2. На этом колесном шасси 2 установлено место 15 управляющего оператора. Место 15 управляющего оператора выполнено в виде кабины 151 оператора, внутри которой имеется по меньшей мере одно сиденье 18, на котором оператор может сидеть. Кабина оператора 151 закрывается дверью 19. Машина 1 также содержит приводную систему 3, приводящую в движение колесное шасси 2 посредством приведения колес 20 машины 1 во вращательное движение. Эта приводная система 3, приводящая в движение шасси 2, содержит известным по существу образом двигатель внутреннего сгорания, соединенный с колесами 20 трансмиссией. Этой приводной системой 3, приводящей в движение шасси 2, управляют в частности при помощи педали управления дроссельной заслонкой (не изображена), расположенной в кабине 151 оператора.
[0041] Погрузочно-разгрузочная машина 1 дополнительно содержит систему 4 обработки груза, которая расположена на шасси 2. Эта система 4 обработки груза содержит по меньшей мере одну стрелу 13 для перемещения груза, установленную на указанном шасси 2 с возможностью поворота вокруг горизонтальной оси 21 вращения, и по меньшей мере один исполнительный механизм 14, приводящий указанную стрелу 13 в движение вокруг горизонтальной оси 21 вращения. Таким образом, стрела 13 для перемещения груза представляет собой манипулятор с поворотной степенью подвижности, установленный с возможностью поворота вокруг горизонтальной оси 21, перпендикулярной продольной оси стрелы, так что стрела 13 может быть перемещена из опущенного положения в поднятое положение и наоборот с использованием исполнительного механизма 14, такого как гидравлический цилиндр, соединенный с гидравлическим насосом посредством гидравлического контура, при этом насос и контур не показаны. Стрела может представлять собой телескопическую стрелу, длину которой можно регулировать между втянутым положением и выдвинутым положением стрелы. С этой целью стрела 13 может быть образована из двух секций стрелы, одна из которых, называемая первой секцией, соединена с возможностью поворота с шасси 10, а другая, называемая второй секцией, вставлена в первую секцию стрелы с возможностью скольжения в ней. В альтернативном варианте стрела может быть не телескопической.
[0042] Вложенное скользящее относительное перемещение секций стрелы может быть получено при помощи второго исполнительного механизма машины, такого как гидроцилиндр двойного действия, который размещен в первой секции стрелы и шток которого прикреплен ко второй секции стрелы для обеспечения возможности приведения секций стрелы в относительное движение относительно друг друга под действием втягивания или выдвижения штока цилиндра.
[0043] На свободном конце стрелы 13 для перемещения груза может быть расположено приспособление 23, соединенное со стрелой посредством шарнирного соединения. Это приспособление 23 может быть приведено в движение вокруг оси шарнирного соединения посредством исполнительного механизма 25, который также может быть образован гидроцилиндром двустороннего действия или двумя гидроцилиндрами одностороннего действия, подключенными параллельно и работающими по очереди.
[0044] В изображенном примере это приспособление 23 содержит вилочный держатель, и исполнительный механизм 25 обеспечивает возможность перемещения вилочного держателя между положением захвата и положением разгрузки посредством поворота приспособления вокруг оси, называемой горизонтальной, которая перпендикулярна продольной оси стрелы 13. Эта ось поворота параллельна оси 21 поворота, вокруг которой стрела 13 соединена с шасси 10. Положение разгрузки соответствует самому повернутому к земле положению вилочного держателя. Положение захвата вилочного держателя соответствует повернутому вверх положению вилочного держателя и соответствующего груза 24 при наличии такого груза.
[0045] Погрузочно-разгрузочная машина 1 дополнительно содержит управляющий блок 5, выполненный с возможностью управления работой исполнительных механизмов 14 и 25 и, при необходимости, выдвижением телескопического механизма при его наличии, что делает возможным осуществление перемещения стрелы 13 и приспособления 23.
[0046] Управляющий блок 5 представляет собой электронный и/или компьютеризированный блок, который, например, содержит микроконтроллер или микропроцессор, связанный с памятью. Таким образом, когда указано, что блок или средства, принадлежащие указанному блоку, выполнены таким образом, чтобы выполнять данную операцию, это означает, что блок содержит машиночитаемые команды и соответствующие средства исполнения, которые обеспечивают возможность выполнения указанной операции, и/или соответствующие электронные компоненты.
[0047] Иными словами, описанные функции и этапы могут быть реализованы в виде компьютерной программы или при помощи аппаратных компонентов (например, программируемых матриц логических элементов). В частности, функции и этапы, выполняемые управляющим блоком 5, могут быть выполнены посредством наборов команд или компьютерных модулей, реализованных в процессоре или контроллере, или могут быть выполнены посредством специализированных электронных компонентов или компонентов FPGA или ASIC. Также возможно комбинировать компьютерные компоненты и электронные компоненты.
[0048] Таким образом, управляющий блок 5 управляет системой 4 обработки груза и, в частности, перемещениями стрелы 13 и приспособления 23 посредством управления соответствующими исполнительными механизмами 14 и 25 через гидравлический контур.
[0049] Управляющие сигналы, поданные управляющим блоком 5, обычно воздействуют на элементы, такие как распределители или клапаны, размещенные в соединении между насосом и исполнительными механизмами 14, 25, так чтобы обеспечить соответствующую подачу текучей среды к исполнительным механизмам 14, 25 по существу известным способом.
[0050] Погрузочно-разгрузочная машина 1 дополнительно содержит устройство 6 управления для управления системой 4 обработки груза. Это устройство 6 управления приводится в действие вручную и может подавать управляющие сигналы на управляющий блок 5. Эти управляющие сигналы обрабатываются управляющим блоком 5. Из этих управляющих сигналов управляющий блок 5 генерирует управляющие сигналы для управления по меньшей мере системой 4 обработки груза, как описано выше.
[0051] В изображенных примерах устройство 6 управления для управления системой 4 обработки груза представляет собой многоцелевое устройство 6 управления. В частности, устройство 6 управления может быть использовано для управления, с одной стороны, системой 4 обработки груза и, с другой стороны, системой 3, приводящей в движение машину 1. В одном варианте устройство 6 управления может представлять собой устройство управления, обеспечивающее возможность управления только системой 4 обработки груза. Далее всегда будет считаться, что устройство 6 управления является многоцелевым устройством управления. Таким образом, это устройство 6 управления для управления системой 4 обработки груза содержит по меньшей мере два элемента управления. В изображенных примерах один из элементов управления, обозначенный на Фигурах номером 10, выполнен с возможностью управления по меньшей мере частью 4 системы обработки груза, а другой элемент управления, обозначенный на Фигурах номером 11, выполнен с возможностью управления по меньшей мере частью системы 3, приводящей в движение машину 1. Кроме того, имеются другие элементы управления, обозначенные на Фигурах как 12a и 12b. Это устройство 6 управления может иметь самые разные формы.
[0052] В примере, изображенном на Фиг. 1, 3 и 4, элемент 10 управления устройства 6 управления для управления системой 4 обработки груза представляет собой рычаг или джойстик, которым оператор машины может управлять вручную, а другие элементы управления 11, 12а, 12b установлены на указанном рычаге. Эти другие элементы управления расположены на рукоятке рычага. Эта рукоятка рычага соответствует той ручной части 61 устройства 6 управления, которая выполнена с возможностью ее захвата при захвате рукой устройства управления в соответствии с его назначением.
[0053] Такое устройство управления хорошо известно специалистам в данной области техники, и пример такого устройства управления описан, например, в патенте FR-2.858.861.
[0054] Рычаг управления или джойстик передает сигналы положения от указанного рычага на управляющий блок 5 известным по существу способом. Эти сигналы положения могут быть интерпретированы управляющим блоком 5 как сигналы для указания перемещения стрелы 13 и/или приспособления 23.
[0055] Согласно одному варианту осуществления рычаг управления может, таким образом, быть перемещен вперед, назад, влево или вправо относительно машины. В изображенном примере этот рычаг управления, выполненный с возможностью перемещения по меньшей мере вперед/назад в направлении к передней/задней части машины, установлен с возможностью перемещения вперед для управления опусканием стрелы 13 и назад для управления поднятием стрелы 13. Таким образом, перемещение рычага управления вперед/назад может управлять работой первого исполнительного механизма 14 между стрелой 13 и шасси 2. Этот рычаг 10 управления может быть дополнительно установлен с возможностью перемещения в направлении влево/вправо, поперек направления вперед/назад, при этом влево для управления положением захвата и вправо для управления положением разгрузки приспособления 23. Таким образом, перемещение рычага управления влево/вправо управляет работой первого исполнительного механизма 25 между приспособлением 23 и стрелой 13. Эти направления вперед/назад и влево/вправо соответствуют основным направлениям, и рычаг управления может быть перемещен в бесконечном числе направлений, причем перемещение рычага управления в заданном направлении соответствует комбинированному действию, пропорциональному положению рычага управления относительно основных направлений. Как показано на Фиг. 4, рычаг управления может быть оснащен элементом 12а управления, таким как ручка, для управления исполнительным механизмом телескопирования для осуществления выдвижения в случае телескопической стрелы 13. Таким образом, вращение ручки, установленной на рычаге управления, в одном направлении обеспечивает возможность выдвижения стрелы 13 посредством скользящего перемещения второй секции стрелы в направлении удлинения стрелы 13, а вращение ручки, установленной на рычаге управления, в противоположном направлении обеспечивает возможность втягивания стрелы.
[0056] Другие кнопки, ручки и т.п., такие как кнопка, изображенная как 12b на Фиг. 3, могут быть обеспечены для управления некоторыми функциями приспособления. Один из элементов управления, который на Фигурах обозначен номером 11, выполнен с возможностью управления по меньшей мере частью системы 3, приводящей в движение машину. Этот элемент 11 управления может быть образован кнопкой реверса с тремя устойчивыми положениями для обеспечения работы машины в прямом направлении, останова в нейтральном положении или работы в обратном направлении. Трансмиссия системы 3 приведения в движение шасси 2 может содержать коробку передач, а управление переключением на повышающую и понижающую передачу может выполняться при помощи нажимной кнопки или какого-либо другого элемента управления, установленного на рычаге. Таким образом, следует понимать, что эти элементы управления могут быть без ограничения реализованы в виде ручки, переключателя, кнопки, рычажного переключателя, датчика, в частности датчика Холла, потенциометра и т.п.
[0057] Рычаг и элементы управления, установленные на рычаге, могут быть приведены в действие оператором всего лишь одной рукой, когда эта рука расположена на ручной части 61 устройства 6 управления, которая в данном случае образована по меньшей мере частью рукоятки рычага управления.
[0058] Погрузочно-разгрузочная машина 1 дополнительно содержит элемент 7 активации приводимого в действие вручную устройства 6 управления. Этот элемент 7 активации установлен на устройстве 6 управления для управления системой 4 обработки груза.
[0059] Элемент 7 активации представляет собой датчик присутствия, выполненный с возможностью обнаружения присутствия руки оператора на указанном устройстве 6 управления в состоянии, в котором устройство 6 управления захвачено рукой в соответствии с его назначением. В частности, элемент 7 активации представляет собой датчик присутствия, расположенный на ручной части 61 устройства 6 управления. Таким образом, элемент 7 активации, приводимый в действие вручную, выполнен с возможностью перехода из неприведенного в действие состояния в приведенное в действие состояние при присутствии руки на ручной части 61 устройства 6 управления, и, наоборот, из приведенного в действие состояния в неприведенное в действие состояние при отсутствии руки на ручной части 61 устройства 6 управления. Следует отметить, что термин "приведенный в действие" следует понимать в самом широком смысле. Приведение в действие элемента 7 активации означает воздействие на элемент 7 активации. Таким образом, приведение в действие элемента 7 активации может без ограничения происходить посредством простого контакта, за счет опирания или давления, посредством присутствия руки на расстоянии, меньшем, чем заданное расстояние, и т.п. в пределах объема изобретения.
[0060] Элемент 7 активации может, например, быть выполнен в виде нажимной кнопки или датчика емкостного типа. Присутствие руки, обращенной к элементу 7 активации, включая бесконтактное присутствие, может быть достаточным для приведения в действие элемента 7 активации в случае датчика емкостного типа.
[0061] Роль этого элемента 7 активации, который активирует устройство 6 управления, описана ниже.
[0062] Погрузочно-разгрузочная машина 1 дополнительно содержит датчик 8 параметра, указывающего на движение машины. Управляющий блок 5 выполнен с возможностью приема данных, передаваемых этим датчиком 8. Управляющий блок выполнен с возможностью обеспечения управления системой обработки груза с использованием устройства управления в зависимости по меньшей мере от данных, передаваемых этим датчиком 8. Этот датчик 8 может иметь самые разные формы. В предпочтительном варианте этот датчик 8 параметра, указывающего на движение машины 1, представляет собой датчик параметра, указывающего на скорость передвижения машины 1, и управляющий блок, выполненный таким образом, чтобы обеспечить возможность управления системой обработки груза с использованием устройства управления в зависимости по меньшей мере от параметра, указывающего на движение машины, выполнен таким образом, чтобы обеспечить возможность управления системой обработки груза с использованием устройства управления в зависимости по меньшей мере от параметра, указывающего на скорость передвижения машины. Этот датчик 8 скорости может представлять собой датчик, который измеряет скорость вращения колес или любого другого механического элемента, указывающего на скорость передвижения машины. Ненулевая скорость также может быть обнаружена посредством обнаружения приведения в движение элемента трансмиссии, взаимодействующего с колесами.
[0063] Наконец, машина 1 содержит на месте 15 управляющего оператора систему 16 обнаружения присутствия оператора на месте управляющего оператора. Эта система 16 обнаружения, выполненная с возможностью обнаружения отсутствия или присутствия оператора на указанном месте, содержит по меньшей мере один датчик 17 присутствия. Этот датчик 17 присутствия является отдельным от ручной части 61 устройства 6 управления. Управляющий блок 5 выполнен таким образом, что при нахождении элемента 7 активации в неприведенном в действие состоянии, возникшем в результате перехода элемента 7 активации из приведенного в действие состояния в неприведенное в действие состояние, указанный блок предотвращает или обеспечивает возможность управления по меньшей мере системой 4 обработки груза с использованием устройства 6 управления по меньшей мере в зависимости от состояния отсутствия или присутствия оператора, обнаруженного системой 16 обнаружения присутствия оператора на указанном месте 15.
[0064] В изображенных примерах датчик 17 присутствия системы 16 обнаружения представляет собой датчик, которым оборудовано сиденье 18 оператора и который чувствителен к давлению прикладываемого веса. Этот датчик находится в активном состоянии и подает сигнал при нахождении оператора на сиденье. Система 16 обнаружения может дополнительно содержать датчик 22, который обнаруживает открытие/закрытие двери 19 кабины 151. Этот датчик находится в активном состоянии и подает сигнал при нахождении двери в закрытом состоянии. Система 16 обнаружения дополнительно содержит модуль 161 обработки, обеспечивающий возможность обработки сигналов от указанных датчиков 17 и 22 для обнаружения присутствия или отсутствия оператора. Этот модуль 161 обработки может быть включен в управляющий блок 5. Управляющий блок 5 выполнен таким образом, что при нахождении элемента 7 активации в неприведенном в действие состоянии, возникшем в результате перехода элемента 7 активации из приведенного в действие состояния в неприведенное в действие состояние, указанный блок предотвращает возможность управления системой 4 обработки груза с использованием устройства 6 управления при обнаружении отсутствия оператора. Следует отметить, что присутствие оператора обнаруживается системой 16 обнаружения, когда датчик 17 присутствия, расположенный на сиденье 18, находится в активном состоянии, или когда при обнаружении нахождения двери в закрытом состоянии датчиком 22, обнаруживающим открытие/закрытие двери 19, датчик 17 присутствия, расположенный на сиденье, находится в неактивном состоянии и перешел из активного состояния в неактивное состояние при нахождении двери в закрытом состоянии без обнаружения открытия двери. Сигналы от этих датчиков подают на модуль 161 обработки.
[0065] Как описано далее, управляющий блок 5 выполнен с возможностью обеспечения или предотвращения работы машины, в частности системы 4 обработки груза и системы 3 приведения в движение колесного шасси, с устройства 6 управления.
[0066] Управляющий блок 5 выполнен с возможностью приема сигналов от элемента 7 активации при нахождении элемента 7 активации в приведенном в действие состоянии. Таким образом, в случаях, когда элемент 7 активации представляет собой нажимную кнопку, сигнал приведения в действие элемента 7 активации подают на управляющий блок 5, когда рука оператора, помещенная на систему 6 управления, нажимает кнопку.
[0067] Если элемент 7 активации образован емкостным датчиком, сигнал подают на управляющий блок 5 простым расположением руки оператора на устройстве 6 управления, обращенном к указанному датчику.
[0068] Когда элемент 7 активации находится в приведенном в действие состоянии, обеспечена возможность управления системой 4 обработки груза и по меньшей мере частью приводной системы 3 в зависимости по меньшей мере от управляющих сигналов, принятых от устройства 6 управления, причем эти управляющие сигналы являются результатом приведения в действие оператором устройства 6 управления, как описано выше.
[0069] При нахождении элемента 7 активации в неприведенном в действие состоянии в результате перехода указанного элемента 7 активации из приведенного в действие состояния в неприведенное в действие состояние обеспечена возможность управления системой 4 обработки груза и по меньшей мере частью приводной системы 3 с использованием устройства 6 управления в зависимости по меньшей мере от скорости, с которой перемещается машина 1.
[0070] В этой связи, машина 1 содержит память 9 для хранения заданной скорости передвижения машины 1, а управляющий блок 5 выполнен таким образом, что при нахождении элемента 7 активации устройства 6 управления в неприведенном в действие состоянии блок обеспечивает возможность управления системой 4 обработки груза с использованием устройства 6 управления, когда скорость передвижения машины превышает заданную скорость, хранящуюся в памяти.
[0071] Машина 1 содержит по меньшей мере один таймер T1, задающий временной интервал, который может быть заранее заданным или регулируемым. Этот таймер T1 обычно реализован часами, и время отсчитывается инкрементно или декрементно до истечения временного интервала, заданного таймером T1. Указанные часы предпочтительно встроены в управляющий блок 5. Этот таймер Т1 запускают при переходе элемента 7 активации из приведенного в действие состояния в неприведенное в действие состояние, а именно при освобождении нажимной кнопки или отвода руки из положения, обращенного к емкостному датчику. Управляющий блок 5 выполнен с возможностью предотвращения управления системой 4 управления и возможно частью системы 3, приводящей в движение шасси 2, с использованием устройства 6 управления, а именно с устройства 6 управления или посредством него по истечении интервала времени, заданного таймером Т1.
[0072] Для предотвращения такого отключения, когда машина 1 находится на этапе вождения, управляющий блок 5 выполнен таким образом, что по мере истечения временного интервала, заданного таймером, таймер Т1 управления может быть сброшен, а именно может возобновить свой отсчет или, соответственно, обратный отсчет временного интервала, заданного таймером Т1, в зависимости по меньшей мере от данных, переданных датчиком 8, который определяет скорость передвижения машины 1.
[0073] В частности, при хранении заданной скорости передвижения машины 1 в памяти 9 управляющий блок 5 выполнен с возможностью сброса таймера T1, когда скорость передвижения машины 1, информация о которой подается датчиком 8, определяющим скорость передвижения машины, превышает заданную скорость, хранящуюся в памяти.
[0074] Таким образом, в качестве примера управляющий блок 5 выполнен с возможностью сброса таймера Т1, когда скорость машины, например, превышает 1 км/ч.
[0075] Аналогичным образом, для предотвращения такого отключения управления, когда устройство 6 управления приводится в действие оператором, управляющий блок 5 также выполнен с возможностью сброса таймера Т1 в зависимости по меньшей мере от управляющих сигналов, принятых от устройства 6 управления.
[0076] Таким образом, после перехода элемента 7 активации из приведенного в действие состояния в неприведенное в действие состояние, пока устройство 6 управления приведено в действие, а именно пока рычаг или любой из элементов управления, находящихся на рычаге, приведен в действие в течение интервала времени, заданного таймером Т1, управление с устройства 6 управления остается возможным. Это управление с устройства 6 управления прекращается, как только устройство 6 управления остается не приведенным в действие в течение периода времени, превышающего временной интервал, заданный таймером Т1, тогда как в то же время скорость передвижения машины ниже заданной скорости. Для восстановления возможности этого управления с устройства 6 управления необходимо последующее приведение в действие элемента 7 активации.
Для усовершенствования машины и предотвращения, в частности, управления системой 4 обработки груза с устройства 6 управления способом, который является даже более чувствительным при возникновении по-видимому нештатной ситуации, управляющий блок 5 выполнен с возможностью запуска по меньшей мере одного дополнительного таймера, называемого таймером Т2 присутствия, задающего временной интервал, в течение которого элемент 7 активации переходит из приведенного в действие состояния в неприведенное в действие состояние, и возможностью предотвращения управления системой 4 обработки груза с использованием устройства 6 управления по истечении интервала времени, заданного таймером Т2 присутствия. Управляющий блок 5 выполнен с возможностью сброса таймера Т2 присутствия в зависимости по меньшей мере от сигналов, поданных системой 16 обнаружения присутствия оператора на указанном месте 15.
[0078] На практике управляющий блок 5 выполнен с возможностью предотвращения сброса таймера Т2 присутствия до тех пор, пока обнаруживается отсутствие оператора на месте 19 управляющего оператора. Это отсутствие оператора может соответствовать:
- либо отсутствию сигнала от датчика 17 обнаружения присутствия, которым оборудовано сиденье 18 места 15 управляющего оператора, при нахождении двери 19 кабины 151 оператора в открытом состоянии
- либо, когда дверь 19 находится в закрытом состоянии, отсутствию сигнала от датчика 17 обнаружения присутствия, которым оборудовано сиденье 18 места 15 управляющего оператора, причем отсутствие сигнала от датчика 17 обнаружения присутствия началось при нахождении двери в открытом состоянии. Таймер Т2 присутствия задает временной интервал, длительность которого меньше, чем длительность временного интервала таймера Т1, так чтобы как можно быстрее отключить управление с устройства 6 управления при обнаружении отсутствия оператора. В случае обнаружения присутствия оператора этот таймер присутствия Т2 сбрасывается, если устройство 6 управления приводится в действие в течение интервала времени, заданного таймером Т2 присутствия, или если скорость передвижения машины превышает заданную скорость. В противном случае этот таймер Т2 присутствия не сбрасывается.
[0079] Пример способа управления:
Блок управления может быть выполнен с возможностью реализации способа управления машиной, как показано на Фиг. 6 и 7. Как описано далее, способ управления служит для обеспечения или предотвращения возможности управления системой 4 обработки груза и по меньшей мере частью системы 3, приводящей в движение машину, с устройства 6 управления, в частности, на основании скорости машины. Согласно одному конкретному аспекту способ осуществляют в режиме реального времени. В дальнейшем предполагается, что устройство 6 управления выполнено с возможностью генерации сигналов для управления как системой 4 обработки груза, так и по меньшей мере частью приводной системы 3, которая приводит в движение машину. Как вариант, устройство 6 управления может быть выполнено с возможностью генерации сигналов для управления системой 4 обработки груза в пределах объема изобретения.
[0080] На этапе S1 элемент 7 активации не приводят в действие, и предотвращают управление системой 4 обработки груза и по меньшей мере частью приводной системы 3 с устройства 6 управления.
[0081] На этапе S2 элемент 7 активации приводят в действие посредством нажатия кнопки или размещения руки напротив емкостного датчика. Таким образом, он подает сигнал приведения в действие на управляющий блок 5.
[0082] На этапе S3 управляющий блок на основании этого сигнала приведения в действие обеспечивает возможность управления системой 4 обработки груза и по меньшей мере частью приводной системы 3 на основании управляющих сигналов, поданных устройством 6 управления.
[0083] На этапе S4 способа управления проверяют, находится ли элемент 7 активации в неприведенном в действие состоянии, а именно подается ли элементом 7 активации сигнал о неприведении в действие элемента 7 активации. Способ управления возвращается к этому этапу S4 до тех пор, пока элемент 7 активации не перейдет в неприведенное в действие состояние.
[0084] Затем способ управления переходит к этапу S5, на котором запускают таймер T1, задающий временной интервал, например, 10 секунд. Начинается отсчет 10-секундного заданного срока, и способ управления переходит к этапу S6. На этапе S6 скорость машины сравнивают с пороговым значением скорости, хранящимся в памяти и обычно равным 1 км/ч. Если скорость больше пороговой скорости, то способ управления возвращается к этапу S5 для повторного запуска таймера Т1, что соответствует сбросу таймера T1. Таким образом, снова начинается отсчет 10-секундного заданного срока. Если скорость меньше пороговой скорости, то способ управления переходит к этапу S7, на котором тестируют приведение в действие устройства 6 управления.
[0085] Управляющий блок 5 имеет модуль для обработки управляющих сигналов, поданных устройством 6 управления. В простейшем варианте простой прием управляющим блоком 5 управляющих сигналов, поданных устройством 6 управления, независимо от типа сигнала может рассматриваться управляющим блоком 5 как представление приведения в действие устройства 6 управления. В случае приведения в действие устройства 6 управления способ управления возвращается к этапу S5, на котором снова происходит сбрасывание таймера Т1. В случае неприведения в действие устройства 6 управления способ управления переходит к этапу S8, на котором происходит сравнение времени, истекшего в пределах временного интервала, заданного таймером Т1, с момента установки таймера T1, с общей продолжительностью временного интервала таймера. Когда это истекшее время больше, чем продолжительность временного интервала, заданного таймером, таймер Т1 считается превысившим лимит времени, и в этом случае способ управления возвращается к этапу S1. В противном случае способ управления возвращается к этапу S5 для повторного сброса таймера T1 и возможно повторного выполнения этапов S6 и S7.
[0086] Таким образом, в состоянии, в котором элемент 7 активации не приведен в действие, и таймер Т1 запущен, если скорость передвижения машины меньше 1 км/ч, и устройство 6 управления не приводят в действие в пределах временного интервала, заданного таймером Т1 управления, то по истечении указанного временного интервала управление с использованием устройства 6 управления предотвращено, и требуется последующее приведение в действие элемента 6 активации для обеспечения возможности управления машиной с устройства 6 управления.
[0087] На этапе S4 способ управления переходит параллельно к этапу S5 и этапу S10, на котором запускают таймер T2, называемый таймером присутствия.
[0088] На этапе S11 система 16 обнаружения в зависимости от сигналов, поданных датчиком 17 для определения присутствия оператора на месте 15, и в частности на сиденье 18 места 15 управляющего оператора, и, возможно, сигналов, поданных датчиком 22, который обнаруживает открытие/закрытие двери 19, а также от обработки указанных сигналов обнаруживает присутствие или отсутствие оператора на месте 15 управляющего оператора.
[0089] Если система 16 обнаружения содержит датчик 17 присутствия, отсутствие оператора на месте управляющего оператора обнаруживают, например, при отсутствии подачи сигнала датчиком 17 присутствия. Если система 16 обнаружения содержит датчик 17 присутствия и датчик 22, обнаруживающий открытие/закрытие двери 19, отсутствие оператора на месте управляющего оператора обнаруживают, например, при отсутствии подачи сигнала датчиком 17 присутствия и при обнаружении открытия двери. Способ управления переходит к этапу S13, на котором проверяют, истек ли временной интервал, заданный таймером Т2. Способ управления выполняет тестирование посредством возвращения к этапам S11 и S13 до тех пор, пока не истечет временной интервал таймера Т2. Если временной интервал, заданный таймером Т2, истек, то способ управления возвращается к этапу S1.
[0090] Если, наоборот, на этапе S11 система 16 обнаружения в зависимости от сигналов, поданных датчиком 17 обнаружения присутствия оператора на месте 15 управляющего оператора, и сигналов, поданных датчиком 22, который обнаруживает открытие/закрытие двери, а также от обработки указанных сигналов обнаруживает присутствие оператора на месте управляющего оператора, например, в случае подачи сигнала присутствия датчиком 17 присутствия, то способ управления переходит к этапу S12, на котором выполняют тестирование, аналогичное этапам S6 и S7, а именно тестирование того, превышает ли скорость передвижения 1 км/ч, и приведено ли в действие устройство 6 управления.
[0091] В случае положительного результата этого тестирования способ управления возвращается к этапу S10, на котором происходит сброс таймера Т1. В противном случае способ управления переходит к этапу S13.
[0092] На этапе S13, если временной интервал, заданный таймером Т2, не истек, то способ управления возвращается к этапу S11.
[0093] Таким образом, в этом способе управления по Фиг. 7 в состоянии, в котором элемент 7 активации не приведен в действие, и таймер Т2 запущен, когда обнаружено отсутствие оператора с использованием системы 16 обнаружения, и время, истекшее с момента запуска таймера T2, превышает временной интервал, заданный указанным таймером T2, управление с использованием устройства 6 управления предотвращено, и требуется последующее приведение в действие элемента 7 активации для обеспечения возможности управления машиной с устройства 6 управления.
[0094] Следует отметить, что временной интервал, заданный таймером Т2, меньше, чем временной интервал, заданный таймером Т1.
[0095] Несмотря на то, что изобретение описано в связи с целым рядом конкретных вариантов осуществления, вполне очевидно, что оно никоим образом не ограничено ими и охватывает все технические эквиваленты описанных средств и их комбинаций, если они находятся в пределах объема изобретения.
[0096] Использование глаголов "иметь", "содержать" и "включать" не исключает наличия элементов или этапов, отличных от перечисленных в формуле изобретения.
Изобретение относится к погрузочным транспортным средствам. Погрузочно-разгрузочная машина (1) для обработки грузов (24) содержит колесное шасси (2), приводную систему (3) для передвижения колесного шасси (2), систему (4) обработки груза, расположенную на шасси (2), управляющий блок (5), устройство (6) управления для управления системой (4) обработки груза, которое выполнено с возможностью приведения в действие оператором вручную. Управляющий блок (5) выполнен с возможностью приема управляющих сигналов от указанного устройства (6) управления, элемент (7) активации для активации приводимого в действие вручную устройства (6) управления. Погрузочно-разгрузочная машина (1) содержит датчик (8) параметра, указывающего на движение машины (1), и управляющий блок (5) выполнен с возможностью обеспечения управления системой (4) обработки груза с использованием устройства (6) управления в зависимости по меньшей мере от параметра, указывающего на движение машины (1). Достигается безопасность управления машиной. 2 н. и 17 з.п. ф-лы, 7 ил.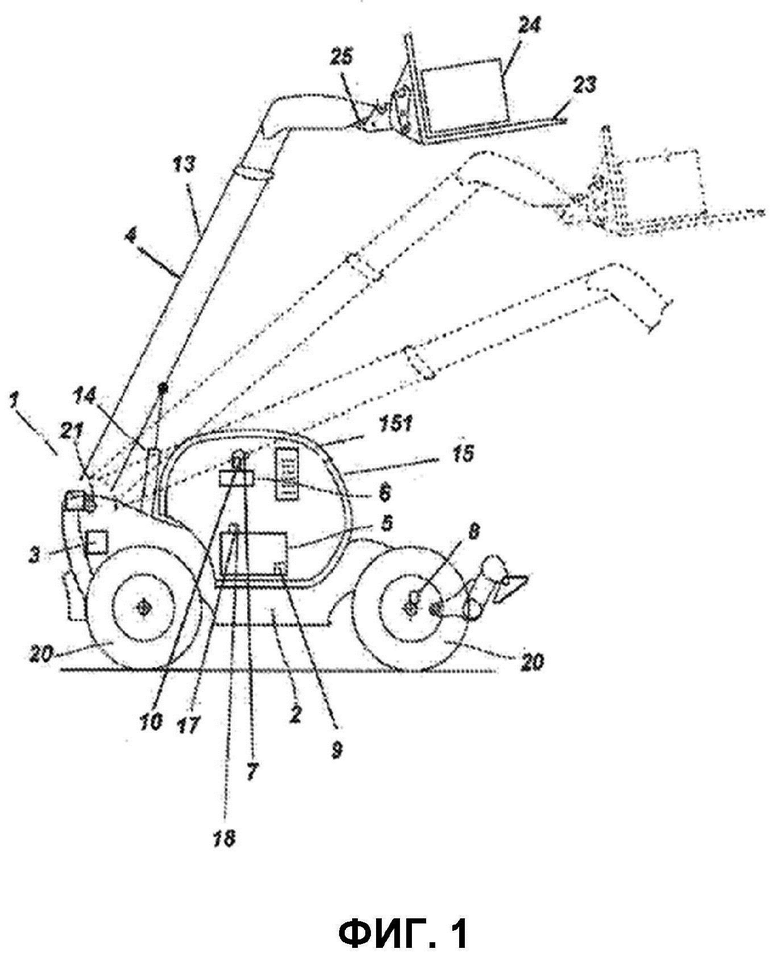
1. Погрузочно-разгрузочная машина (1) для обработки грузов (24), содержащая:
- колесное шасси (2),
- приводную систему (3), приводящую в движение колесное шасси (2),
- систему (4) обработки груза, расположенную на шасси (2),
- управляющий блок (5), устройство (6) управления для управления системой (4) обработки груза, которое выполнено с возможностью приведения в действие оператором вручную, причем управляющий блок (5) выполнен с возможностью приема управляющих сигналов от указанного устройства (6) управления, элемент (7) активации для указанного приводимого в действие вручную устройства (6) управления, датчик (8), определяющий параметр, указывающий на движение машины (1), причем управляющий блок (5) выполнен с возможностью обеспечения управления системой (4) обработки груза с использованием устройства (6) управления в зависимости по меньшей мере от параметра, указывающего на движение машины (1), отличающаяся тем, что когда управляющий блок (5) выполнен таким образом, что при нахождении элемента (7) активации в приведенном в действие состоянии указанный блок обеспечивает возможность управления системой (4) обработки груза в зависимости по меньшей мере от управляющих сигналов, принятых от устройства (6) управления, управляющий блок (5) выполнен с возможностью:
- запуска по меньшей мере одного таймера (Т1), задающего временной интервал перехода элемента (7) активации из приведенного в действие состояния в неприведенное в действие состояние,
- предотвращения управления системой (4) обработки груза с использованием устройства (6) управления по истечении временного интервала, заданного таймером (Т1), и
- сброса таймера (Т1) в зависимости по меньшей мере от данных, переданных датчиком (8) параметра, указывающего на движение машины (1), в течение временного интервала, заданного таймером (Т1).
2. Погрузочно-разгрузочная машина (1) по п. 1, отличающаяся тем, что управляющий блок (5) выполнен таким образом, что при нахождении элемента (7) активации устройства (6) управления в неприведенном в действие состоянии указанный блок обеспечивает возможность управления системой (4) обработки груза с использованием устройства (6) управления в зависимости по меньшей мере от параметра, указывающего на движение машины (1).
3. Погрузочно-разгрузочная машина (1) по п. 1 или 2, отличающаяся тем, что управляющий блок (5) выполнен таким образом, что при нахождении элемента (7) активации устройства (6) управления в неприведенном в действие состоянии в результате перехода указанного элемента (7) активации из приведенного в действие состояния в неприведенное в действие состояние указанный блок обеспечивает возможность управления системой (4) обработки груза с использованием устройства (6) управления в зависимости по меньшей мере от параметра, указывающего на движение машины (1).
4. Погрузочно-разгрузочная машина (1) по одному из пп. 1-3, отличающаяся тем, что датчик (8) параметра, указывающего на движение машины (1), является датчиком (8) параметра, указывающего на скорость передвижения машины (1), тем, что машина (1) содержит память (9) для хранения заданной скорости передвижения машины (1), и тем, что управляющий блок (5) выполнен таким образом, что при нахождении элемента (7) активации устройства (6) управления в неприведенном в действие состоянии указанный блок обеспечивает возможность управления системой (4) обработки груза с использованием устройства (6) управления, когда скорость передвижения машины, передаваемая датчиком (8) параметра, указывающего на скорость передвижения машины, больше заданного значения, хранящегося в памяти.
5. Погрузочно-разгрузочная машина (1) по п. 4, отличающаяся тем, что когда датчик (8) параметра, указывающего на движение машины (1), является датчиком параметра, указывающего на скорость передвижения машины (1), управляющий блок (5) выполнен с возможностью сброса таймера (Т1), когда скорость передвижения машины (1), передаваемая датчиком (8) параметра, указывающего на скорость передвижения машины (1), больше заданной скорости, хранящейся в памяти.
6. Погрузочно-разгрузочная машина (1) по любому из пп. 1-5, отличающаяся тем, что управляющий блок (5) выполнен с возможностью сброса таймера (Т1) в зависимости по меньшей мере от управляющих сигналов, принятых от устройства (6) управления.
7. Погрузочно-разгрузочная машина (1) по одному из пп. 1-6, отличающаяся тем, что устройство (6) управления для управления системой (4) обработки груза представляет собой устройство (6) управления, содержащее по меньшей мере два элемента (10, 11, 12a, 12b) управления.
8. Погрузочно-разгрузочная машина (1) по п. 7, отличающаяся тем, что устройство (6) управления для управления системой (4) обработки груза является многоцелевым устройством (6) управления, тем, что по меньшей мере один элемент (10) из элементов (10, 11, 12a, 12b) управления выполнен с возможностью управления по меньшей мере частью системы (4) обработки груза, и тем, что другой элемент (11) управления или другой элемент (11) из элементов (10, 11, 12a, 12b) управления выполнен с возможностью управления по меньшей мере частью приводной системы (3), приводящей в движение машину (1).
9. Погрузочно-разгрузочная машина (1) по п. 7 или 8, отличающаяся тем, что один элемент (10) управления из элементов (10, 11, 12a, 12b) управления устройства (6) управления для управления системой (4) обработки груза представляет собой рычаг, а другие элементы (11, 12a, 12b) управления находятся на указанном рычаге.
10. Погрузочно-разгрузочная машина (1) по одному из пп. 1-9, отличающаяся тем, что элемент (7) активации установлен на устройстве (6) управления для управления системой (4) обработки груза.
11. Погрузочно-разгрузочная машина (1) по одному из пп. 1-10, отличающаяся тем, что устройство (6) управления содержит ручную часть (61), выполненную с возможностью ее захвата рукой, и тем, что элемент (7) активации представляет собой датчик присутствия, расположенный на ручной части (61) устройства (6) управления.
12. Погрузочно-разгрузочная машина (1) по одному из пп. 1-11, отличающаяся тем, что система (4) обработки груза содержит по меньшей мере одну стрелу (13) для перемещения груза, установленную на указанном шасси (2) с возможностью поворота вокруг горизонтальной оси (21) вращения, и по меньшей мере один исполнительный механизм (14), приводящий указанную стрелу (13) для перемещения груза в движение вокруг указанной горизонтальной оси (21) вращения.
13. Погрузочно-разгрузочная машина (1) по одному из пп. 1-12, отличающаяся тем, что машина (1) содержит место (15) управляющего оператора, которое оборудовано системой (16) обнаружения, обеспечивающей возможность обнаружения присутствия или отсутствия оператора на указанном месте (15), причем эта система (16) обнаружения содержит по меньшей мере один датчик (17) присутствия, выполненный с возможностью обнаружения присутствия оператора по меньшей мере в одном положении указанного места (15), и управляющий блок (5) выполнен таким образом, что при нахождении элемента (7) активации в неприведенном в действие состоянии после перехода элемента (7) активации из приведенного в действие состояния в неприведенное в действие состояние указанный блок предотвращает или обеспечивает возможность управления по меньшей мере системой (4) обработки груза с использованием устройства (6) управления в зависимости по меньшей мере от состояния присутствия оператора или отсутствия оператора, обнаруженного системой (16) обнаружения присутствия оператора на указанном месте (15).
14. Погрузочно-разгрузочная машина (1) по п. 13, отличающаяся тем, что место (15) управляющего оператора имеет форму кабины (151) оператора, внутри которой имеется по меньшей мере одно сиденье (18), на котором оператор может сидеть, причем указанная кабина (151) оператора закрывается дверью (19), и тем, что сиденье (18) оборудовано датчиком присутствия или по меньшей мере одним из датчиков (17) присутствия системы (16) обнаружения присутствия оператора на указанном месте (15).
15. Погрузочно-разгрузочная машина (1) по п. 13 или 14, отличающаяся тем, что система (16) обнаружения присутствия оператора на указанном месте (15) содержит по меньшей мере один датчик (22) обнаружения открытия и/или закрытия двери (19).
16. Погрузочно-разгрузочная машина (1) по одному из пп. 13-15, отличающаяся тем, что управляющий блок (5) выполнен с возможностью запуска по меньшей мере одного дополнительного таймера (Т2), называемого таймером присутствия, задающего временной интервал, в течение которого элемент (7) активации переходит из приведенного в действие состояния в неприведенное в действие состояние, и с возможностью предотвращения управления системой (4) обработки груза с использованием устройства (6) управления по истечении интервала времени, заданного таймером (Т2) присутствия, и тем, что управляющий блок (5) выполнен с возможностью сброса таймера (Т2) присутствия в зависимости по меньшей мере от состояния отсутствия или присутствия оператора, обнаруженного системой (16) обнаружения присутствия оператора на указанном месте (15).
17. Способ управления погрузочно-разгрузочной машиной (1) для обработки грузов (24), содержащей:
- колесное шасси (2),
- приводную систему (3), приводящую в движение колесное шасси (2),
- систему (4) обработки груза, расположенную на шасси (2),
- управляющий блок (5),
- устройство (6) управления для управления системой (4) обработки груза, которое выполнено с возможностью приведения в действие оператором вручную, причем управляющий блок (5) выполнен с возможностью приема управляющих сигналов от указанного устройства (6) управления,
- датчик (8) параметра, указывающего на движение машины (1),
- элемент (7) активации для указанного приводимого в действие вручную устройства (6) управления, причем указанный способ включает
- этап ручного приведения в действие элемента (7) активации, который приводит в действие устройство (6) управления, таким образом, чтобы при нахождении элемента (7) активации в приведенном в действие состоянии обеспечивать возможность управления системой (4) обработки груза в зависимости по меньшей мере от управляющих сигналов, принятых от устройства (6) управления, отличающийся тем, что указанный способ включает этап авторизации управления системой (4) обработки груза с использованием устройства (6) управления в зависимости по меньшей мере от параметра, указывающего на движение машины (1), причем указанный способ включает
- этап запуска таймера (Т1), задающего временной интервал перехода элемента (7) активации из приведенного в действие состояния в неприведенное в действие состояние,
- этап предотвращения управления системой (4) обработки груза с использованием устройства (6) управления по истечении временного интервала, заданного таймером (Т1),
- этап сброса таймера (Т1) в зависимости от данных, переданных датчиком (8) параметра, указывающего на движение машины (1), в течение временного интервала, заданного таймером (T1).
18. Способ управления погрузочно-разгрузочной машиной (1) для обработки грузов (24) по п. 17, отличающийся тем, что, когда датчик (8) параметра, указывающего на движение машины (1), является датчиком параметра, указывающего на скорость передвижения машины (1), и когда машина (1) содержит память (9) для хранения заданной скорости передвижения машины (1), при нахождении элемента (7) активации в неприведенном в действие состоянии в результате перехода элемента (7) активации из приведенного в действие состояния в неприведенное в действие состояние обеспечена возможность управления системой (4) обработки груза с использованием устройства (6) управления, когда скорость передвижения машины больше заданного значения, хранящегося в памяти.
19. Способ управления погрузочно-разгрузочной машиной по п. 17 или 18, отличающийся тем, что включает этап сброса таймера (Т1) в зависимости от управляющих сигналов, принятых от устройства (6) управления.
| EP 1953027 A1, 06.08.2008 | |||
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1981 |
|
SU981078A1 |
| EP 3431435 A1, 23.01.2019 | |||
| US 5109945 A, 05.05.1992 | |||
| 0 |
|
SU154207A1 | |
