Область техники
Изобретение относится к области погрузочно-разгрузочных машин, содержащих основной корпус, в целом предназначенный для размещения на земле, по меньшей мере одну погрузочно-разгрузочную стрелу, предназначенную для приема полезной нагрузки, которую необходимо переместить, и исполнительное устройство, выполненное с возможностью осуществления перемещения погрузочно-разгрузочной стрелы относительно основного корпуса, и в частности, относится к передвижным погрузочно-разгрузочным машинам.
Такая машина, в частности, может быть выполнена в виде автопогрузчика с телескопической стрелой, вилочного погрузчика, подъемного крана, механической лопаты, ковшового погрузчика или другой машины.
Уровень техники
В области погрузочно-разгрузочных машин в некоторых странах было принято решение принять стандарты, которые предписывают производителям придерживаться определенных требований в отношении контроля устойчивости машины и управления устойчивостью машины во время ее работы.
Силы, действующие на устойчивость работающей погрузочно-разгрузочной машины, включают как гравитационные силы, также называемые статическими нагрузками, а именно, вес погрузочно-разгрузочной стрелы, полезную нагрузку, основной корпус и/или другие элементы машины, и силы инерции, также называемые динамическими нагрузками, а именно, ускорения, передаваемые между погрузочно-разгрузочной стрелой, полезной нагрузкой, основным корпусом и/или другими элементами машины в результате перемещений, выполняемых во время работы, в частности, перемещений погрузочно-разгрузочной стрелы и полезной нагрузки относительно основного корпуса.
Ограничение сил инерции можно естественным образом обеспечить путем ограничения скорости перемещения компонентов машины. Так, европейский стандарт EN 1459: 1998, озаглавленный «Безопасность промышленных автопогрузчиков - самоходных автопогрузчиков с изменяемым вылетом» (“Safety of industrial trucks - self-propelled variable reach trucks”), предусматривает ограничение максимальной скорости. В частности, этот стандарт предусматривает ограничение этой скорости, так чтобы внезапная остановка погрузочно-разгрузочной стрелы, нагруженной максимальной полезной нагрузкой, не смогла бы вызвать опрокидывание машины, допуская при этом временный подъем задних колес машины.
Однако введение постоянного ограничения скорости будет препятствовать достижению цели эффективности работы, которую преследуют в области погрузочно-разгрузочных машин. Поэтому постоянное ограничение скорости не может являться удовлетворительным общим решением проблемы контроля устойчивости машин и управления устойчивостью работающих машин.
Другое известное решение для уменьшения сил инерции, передаваемых на основной корпус погрузочно-разгрузочной стрелой и полезной нагрузкой включает автоматическое замедление перемещения погрузочно-разгрузочной стрелы, в частности, когда указанная стрела приближается к положению завершения перемещения. Решения этого типа, в частности, описаны в публикациях GB-A-1403046, US-A-4006347, EP-A-0059901, US-A-5333533, US-A-5119949 и GB-A-2390595.
В US-A-5333533 зона вблизи завершения перемещения определяется программой работы, хранящейся в блоке управления машины. Эта программа определяет положения завершения хода погрузочно-разгрузочной стрелы относительно корпуса машины и предварительно определенные зоны в окрестности положений завершения перемещения, и в этих зонах перемещение автоматически замедляется. Помимо повышения устойчивости машины достигаются другие преимущества, получаемые в результате замедления погрузочно-разгрузочных стрел в зоне вблизи завершения перемещения: снижение усталости и износа погрузочно-разгрузочных стрел и их гидравлических приводов, улучшение условий работы оператора.
В EP-A-0059901 зона вблизи завершения перемещения также определяется положениями завершения перемещения лестницы или погрузочно-разгрузочной стрелы, которые хранятся в блоке управления машины. Эти положения завершения перемещения также определяются в зависимости от полезной нагрузки, которую несет лестница или погрузочно-разгрузочная стрела, чтобы соответствовать пределам устойчивости транспортного средства.
В GB-A-1403046, US-A-4006347, US-A-5119949 или GB-A-2390595 зона вблизи завершения перемещения определяется путем измерения нагрузки, представляющей момент силы, приложенный к машине.
В EP-A-2733110 описывает аналогично вышеупомянутым документам погрузочно-разгрузочную машину, в которой во время аварийной ситуации перемещение погрузочно-разгрузочной стрелы управляется и изменяется автоматически с использованием автоматических корректирующих мер, включающих, например, опускание или укорачивание телескопической стрелы.
В EP-A-2736833 описывает погрузочно-разгрузочную машину, в которой перемещение погрузочно-разгрузочной стрелы управляется и поддерживается в каждом положении стрелы на скорости, которая ниже заданной максимальной скорости перемещения.
В EP-A-2263965 описывает погрузочно-разгрузочную машину, в которой скорость перемещения машины на земле измеряется для того, чтобы отменить некоторые команды машины.
В JP-A-2005273262 и JP-A-563114730 используют принципы работы, которые уже описаны выше.
Раскрытие сущности изобретения
Вышеупомянутый уровень техники имеет недостаток, заключающийся в том, что он лишает оператора эффективного управления скоростью перемещения погрузочно-разгрузочной стрелы, по меньшей мере в зоне вблизи завершения перемещения, что может повышать сложность выполнения точного размещения погрузочно-разгрузочной стрелы, и может ограничивать его способность приобретения навыков и выполнения рабочих функций.
Одна задача изобретения состоит в создании способов и систем управления, которые подходят для выполнения эффективного управления оператором перемещением машины, гарантируя при этом надежное управление устойчивостью машины.
С этой целью изобретение предусматривает погрузочно-разгрузочную машину содержащую:
основной корпус;
погрузочно-разгрузочную стрелу, предназначенную для приема груза, подлежащего перемещению;
исполнительное устройство, выполненное с возможностью осуществления перемещения погрузочно-разгрузочной стрелы относительно основного корпуса;
компонент управления, выполненный управляемым пользователем, чтобы выдавать сигнал запроса на перемещение, предназначенный для указания исполнительному устройству выполнить или остановить перемещение погрузочно-разгрузочной стрелы исполнительным устройством по сигналу запроса на перемещение, причем сигнал запроса на перемещение имеет параметр, представляющий скорость перемещения, которое подлежит выполнению, при этом компонент управления выполнен управляемым пользователем, чтобы настраивать указанный параметр сигнала запроса на перемещение из множества значений параметра, соответственно представляющих множество значений скорости и состояние остановки;
блок управления, выполненный с возможностью по сигналу запроса на перемещение сравнивать величину, представляющую скорость выполняемого или подлежащего выполнению перемещения, с пороговым значением, представляющим максимальную допустимую скорость, и управлять исполнительным устройством в зависимости от результата указанного сравнения, чтобы:
выполнять или продолжать перемещение погрузочно-разгрузочной стрелы пока величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, меньше указанного порогового значения; и
предотвращать или останавливать перемещение погрузочно-разгрузочной стрелы, как только величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, становится больше указанного порогового значения.
Изобретение также предоставляет способ управления для управления исполнительным устройством в погрузочно-разгрузочной машине, содержащей основной корпус и погрузочно-разгрузочную стрелу, выполненную с возможностью приема груза, подлежащий перемещению, причем исполнительное устройство выполнено с возможностью осуществления перемещения погрузочно-разгрузочной стрелы относительно основного корпуса;
при этом способ включает:
сравнение величины, представляющей скорость выполняемого или подлежащего выполнению перемещения, по сигналу запроса на перемещение с пороговым значением, представляющим допустимую максимальную скорость; и
управление исполнительным устройством в зависимости от результата указанного сравнения, чтобы:
выполнять или продолжать перемещение погрузочно-разгрузочной стрелы пока величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, меньше указанного порогового значения; и
предотвращать или останавливать перемещение погрузочно-разгрузочной стрелы, как только величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, становится больше указанного порогового значения.
Благодаря этим признакам перемещение погрузочно-разгрузочной стрелы, выполняемое машиной, всегда выполняется в соответствии с запросом на перемещение, вырабатываемым оператором, но это перемещение не выполняется или прерывается, когда запрос оператора приводит или привел бы к превышению порогового значения, представляющего максимальную допустимую скорость. Другими словами, блок управления действует в качестве фильтра «все или ничего», который выполняет или разрешает выполнение запросов на перемещения, которые соответствуют критерию допустимости, но который предотвращает или отменяет выполнение запросов на перемещения, которые не соответствуют критерию допустимости. В этом случае блоку управления не нужно изменять запросы на перемещения, отправляемые оператором, что обеспечивает им эффективное управление этими запросами, в частности в отношении скорости.
Согласно вариантам осуществления погрузочно-разгрузочная машина или способ управления может содержать один или более нижеперечисленных признаков.
Пороговое значение, представляющее максимальную скорость, может быть определено различными способами с целью исключения перемещений, связанных с чрезмерным количеством перемещения, а именно с количеством перемещения, которое машина не может воспринять или распределить без риска создания неустойчивости.
Согласно одному варианту осуществления машина дополнительно содержит датчик указателя опрокидывающего момента для измерения величины, показывающей опрокидывающий момент, приложенный на основной корпус, относительно оси опрокидывания.
Использование такого датчика указателя опрокидывающего момента позволяет блоку управления учитывать информацию, относящуюся к опрокидывающему моменту в данный момент времени. Такой датчик указателя опрокидывающего момента может быть расположен различными способами для измерения различных величин. Согласно одному варианту осуществления датчик указателя опрокидывающего момента содержит экстензометр, например, экстензометр, который чувствителен к деформациям оси подвески машины (изменению длины между двумя отдельными крайними положениями на оси) и/или погрузочно-разгрузочной стрелы. Согласно одному варианту осуществления датчик указателя опрокидывающего момента содержит датчик давления в исполнительном устройстве стрелы, например, датчик давления, расположенный на цилиндре исполнительного устройства. Согласно другому примеру, датчик указателя опрокидывающего момента может быть датчиком нагрузки, как отмечено в EP-A-1532065. Датчик указателя опрокидывающего момента также может быть выполнен в виде измерительной системы, содержащей множество датчиков, измеряющих множество физических величин, и блок обработки для объединения этих измерений в виде величины, указывающей опрокидывающий момент.
Согласно одному варианту осуществления машина дополнительно содержит модуль определения порогового значения, выполненный с возможностью определения порогового значения, представляющего максимально допустимую скорость, в зависимости от измерительного сигнала, выдаваемого датчиком указателя опрокидывающего момента. Согласно одному варианту осуществления пороговое значение, представляющее допустимую максимальную скорость, имеет тенденцию к снижению, когда опрокидывающий момент увеличивается.
Согласно одному варианту осуществления датчик указателя опрокидывающего момента расположен на концевой части основного корпуса, и повернут в направлении, противоположном направлению выполняемого или подлежащего выполнению перемещения по сигналу запроса на перемещение, и величина, измеренная датчиком указателя опрокидывающего момента, сдвигается в противоположном направлении к опрокидывающему моменту. Такой вариант осуществления показан, например, в случае экстензометра, измеряющего деформации задней оси погрузочно-разгрузочного транспортного средства, в котором погрузочно-разгрузочная стрела проходит в направлении передней части транспортного средства.
Согласно одному варианту осуществления датчик указателя опрокидывающего момента расположен на концевой части основного корпуса, и повернут в направлении выполняемого или подлежащего выполнению перемещения по сигналу запроса на перемещение, и величина, измеренная датчиком указателя опрокидывающего момента, сдвигается в том же направлении, что и опрокидывающий момент. Такой вариант осуществления показан, например, в случае экстензометра, измеряющего деформации передней оси погрузочно-разгрузочного транспортного средства, в котором погрузочно-разгрузочная стрела также проходит в направлении передней части транспортного средства.
Типы перемещения погрузочно-разгрузочной стрелы, выполняемые исполнительным устройством, могут быть различными, например, поступательным или поворотным перемещением. Согласно предпочтительному варианту осуществления исполнительное устройство выполнено с возможностью выполнения поворотного перемещения погрузочно-разгрузочной стрелы вокруг оси, которая по существу является горизонтальной относительно основного корпуса.
Погрузочно-разгрузочная стрела может иметь одну или более степеней свободы относительно основного корпуса. Когда существует несколько степеней свободы перемещения с множеством исполнительных устройств, которое связано с этими соответствующими степенями свободы перемещения, все различные исполнительные устройства не обязательно управляются одинаковым образом. В частности, способы управления, описанные в данном документе, предпочтительно применяются к степени(степеням) свободы перемещения, которые оказывают большее влияние на устойчивость машины.
Величина, представляющая скорость, используемую для управления машиной и/или уведомление о риске опрокидывания, может быть определена различными способами.
Согласно одному варианту осуществления блок управления выполнен с возможностью приема сигнала запроса на перемещение, вырабатываемого элементом управления. В этом случае блок управления может учитывать параметр сигнала запроса на перемещение, например его амплитуду, его частоту, его длительность или любой другой заданный параметр, в качестве величины, представляющей скорость перемещения, которое подлежит выполнению. Согласно одному варианту осуществления сравнение, выполняемое блоком управления, является сравнением парамета сигнала запроса на перемещение и указанного порогового значения.
Компонент управления, выполненный управляемым пользователем, может быть выполнен различными способами, например, в виде шарнирного рычага, поворотной кнопки, сенсорного экрана или тому подобного. Согласно одному варианту осуществления компонент управления, выполненный управляемым пользователем, соединен с блоком управления, чтобы снабжать блок управления сигналом запроса на перемещение в виде электрического сигнала. Например, параметр сигнала запроса на перемещение, который представляет запрошенную скорость, представляет собой уровень напряжения, интенсивности, частоты или длительности сигнала запроса.
Согласно одному варианту осуществления способ управления, реализованный блоком управления, содержит этап приема сигнала запроса на перемещение.
Согласно другим вариантам осуществления компонент управления, генерирующий сигнал запроса на перемещение, необязательно соединен с блоком управления, или блок управления необязательно выполнен с возможностью према этого сигнала запроса на перемещение, например, если это чисто механический сигнал.
Согласно одному варианту осуществления, который может быть использован в этом случае, погрузочно-разгрузочная машина дополнительно содержит средство измерения для измерения мгновенной скорости погрузочно-разгрузочной стрелы относительно основного корпуса. В этом случае, сравнение, выполненное блоком управления, может быть сравнением указанной мгновенной скорости и указанного порогового значения.
Для измерения мгновенной скорости погрузочно-разгрузочной стрелы относительно основного корпуса можно использовать различные методы. В соответствии с методом более непосредственного измерения, может использоваться датчик угловой или линейной скорости. В соответствии с методом более косвенного измерения, можно измерять величину, коррелирующую с мгновенной скоростью погрузочно-разгрузочной стрелы, например, скоростью подвижной части, соединенной с погрузочно-разгрузочной стрелой или другой частью. Согласно одному варианту осуществления, в котором исполнительное устройство содержит гидравлический привод, машина дополнительно содержит средство измерения для измерения гидравлического потока, подлежащего подаче в гидравлический привод, в качестве информации о скорости. В этом случае, сравнение, выполняемое блоком управления, может быть сравнением гидравлического потока и указанного порогового значения.
Одно или более исполнительное устройство(устройства) погрузочно-разгрузочной стрелы могут быть выполнены различными способами, например, в виде одного или более электрических или гидравлических приводов.
Согласно одному варианту осуществления исполнительное устройство содержит гидравлический привод и устройство с переменным расходом для регулирования гидравлического потока, который подлежащего подаче в гидравлический привод. Такое гидравлическое устройство с переменным расходом может быть выполнено различными способами.
Согласно одному варианту осуществления устройство с переменным расходом содержит насос с переменной производительностью. Например, в насосе с наклонной пластиной компонент регулирования расхода может влиять на угол наклона наклонной пластины. Согласно одному варианту осуществления устройство с переменным расходом содержит пропорциональный распределитель. Например, в пропорциональном распределителе компонент регулирования расхода может влиять на положение задвижки.
Согласно одному варианту осуществления компонент управления, выполненный управляемым пользователем, функционально соединен, например, механически или гидравлически, с устройством с переменным расходом, чтобы перемещать компонент для регулирования расхода устройства с переменным расходом в зависимости от воздействия пользователя на компонент управления.
В этом случае не факт, что блок управления способен предотвратить непосредственное приведение в действие устройства с переменным расходом посредством воздействия пользователя на компонент управления и создания результирующего гидравлического потока.
Согласно одному варианту осуществления, который может быть использован в этом случае, исполнительное устройство дополнительно содержит электромагнитный клапан, расположенный между устройством с переменным расходом и гидравлическим приводом, причем электромагнитный клапан может управляться блоком управления, чтобы предотвращать или останавливать перемещение погрузочно-разгрузочной стрелы, как только величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, становится больше указанного порогового значения.
В таком варианте осуществления сигнал запроса на перемещение может быть перемещением компонента для регулирования расхода устройства с переменным расходом. Такое перемещение может быть измерено тензодатчиком и выдано блоку управления в виде электрического сигнала. Однако, не всегда возможно или желательно предусматривать такой тензодатчик в устройстве с переменным расходом, в частности, по причинам, учитывающим пространственные требования или стоимость устройства с переменным расходом. В отсутствие такого датчика перемещения, блок управления не может быть легко снабжен сигналом запроса на перемещение. В этом случае, блок управления может работать на основе измерения фактического перемещения погрузочно-разгрузочной стрелы, а не от сигнала запроса на перемещение.
В предпочтительном варианте осуществления электромагнитный клапан представляет собой клапан постепенного запуска. Использование клапана постепенного запуска обеспечивает возможность надежного выполнения измерения мгновенной скорости погрузочно-разгрузочной стрелы до того, как погрузочно-разгрузочная стрела получит значительное количество перемещения, так что прерывание перемещения может произойти без какого-либо чрезмерного воздействия в случае, если допустимое пороговое значение скорости превышен.
Одна из идей, преследуемых другой задачей изобретения, сосотоит в том, чтобы предложить способы и системы для указания риска неустойчивости в погрузочно-разгрузочной машине, которые способны помочь оператору машины выполнять ручное управление перемещениями, не снижая эффективности, а также и безопасности машины.
С этой целью в соответствии со второй задачей изобретение также предусматривает погрузочно-разгрузочную машину, содержащую:
основной корпус;
погрузочно-разгрузочную стрелу, предназначенную для приема груза, подлежащий перемещению;
исполнительное устройство, выполненное с возможностью осуществления перемещения погрузочно-разгрузочной стрелы относительно основного корпуса; и
блок управления, выполненный с возможностью формирования сигнала риска опрокидывания, который в совокупности содержит:
реальный вклад, зависящий от величины, указывающей опрокидывающий момент, приложенный на основной корпус относительно оси опрокидывания; и
виртуальный вклад, зависящий от величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы, которое выполняется или подлежит выполнению исполнительным устройством, причем перемещение погрузочно-разгрузочной стрелы ориентировано в направлении, не параллельном оси опрокидывания.
Изобретение также предусматривает способ оповещения для указания риска опрокидывания погрузочно-разгрузочной машины, содержащей основной корпус и погрузочно-разгрузочную стрелу, выполненную с возможностью приема груза, подлежащий перемещению, причем исполнительное устройство выполнено с возможностью осуществления перемещения погрузочно-разгрузочной стрелы относительно основного корпуса,
при этом способ включает:
измерение величины, указывающей опрокидывающий момент, приложенный на основной корпус относительно оси опрокидывания;
измерение величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы, которое выполняется или подлежит выполнению исполнительным устройством, причем перемещение погрузочно-разгрузочной стрелы ориентировано в направлении не параллельном оси опрокидывания; и
формирование сигнала риска опрокидывания, содержащего реальный вклад, зависящий от величины, указывающей опрокидывающий момент, и виртуальный вклад, зависящий от величины, представляющей скорость, причем реальный вклад и виртуальный вклад суммируются.
Благодаря этим признакам оператору или автоматической системе управления может быть послан сигнал риска опрокидывания, который отражает как вклад гравитационных сил в неустойчивость машины в виде реального вклада, зависящего от величины, указывающей опрокидывающий момент, так и вклад сил инерции в неустойчивость машины в виде виртуального вклада, зависящего от величины, представляющей скорость. Однако силы инерции учитываются в виртуальной форме без реального создания указанных сил. Таким образом, зависимость виртуального вклада от величины, представляющей скорость, представляет способность погрузочно-разгрузочной стрелы прикладывать силы инерции к корпусу машины при остановке ее перемещения относительно указанного корпуса.
Согласно вариантам осуществления погрузочно-разгрузочная машина или способ сигнализации может содержать один или более следующих признаков.
Согласно одному варианту осуществления величина, указывающая опрокидывающий момент, измеряется датчиком указателя опрокидывающего момента, расположенным, например, на оси погрузочно-разгрузочной машины или вблизи цилиндра исполнительного устройства.
Согласно одному варианту осуществления мгновенная скорость погрузочно-разгрузочной стрелы измеряется относительно основного корпуса в качестве величины, представляющей скорость.
Согласно другому вариантe осуществления параметр сигнала запроса на перемещения, предназначенный для указания исполнительному устройству, определяется в качестве величины, представляющей скорость.
Согласно одному варианту осуществления способ дополнительно включает генерирование визуального или звукового сигнала, предназначенного для оператора, в зависимости от сигнала риска опрокидывания.
Согласно одному варианту осуществления машина дополнительно содержит панель отображения, соединенную с блоком управления для отображения визуальной шкалы в зависимости от сигнала риска опрокидывания. В альтернативном варианте могут отображаться две отдельные визуальные шкалы, чтобы по отдельности представлять два вклада.
Эти способы сигнализации для погрузочно-разгрузочной машины могут использоваться для помощи оператору, ответственному за управление перемещениями погрузочно-разгрузочной стрелы. Они применимы для помощи автоматизированной системе управления, в которую будет подаваться сигнал риска опрокидывания.
Некоторые аспекты изобретения основаны на идее анализа энергетического состояния погрузочно-разгрузочной машины как вклада потенциального энергии гравитации и вклада кинетической энергии. С точки зрения потенциальной энергии, устойчивость машины в гравитационном поле выражается размещением текущего состояния машины на дне потенциальной ямы, которая может быть глубже или мельче в зависимость от массы и положения полезной нагрузки. С точки зрения кинетической энергии, скорость перемещения погрузочно-разгрузочной стрелы относительно основного корпуса выражается количеством энергии, которая возможно будет передана на основной корпус в относительно большом количестве, в случае изменения механического взаимодействия между ними, например, в случае резкой остановки перемещения. Одна из идей изобретения состоит в том, чтобы управлять и/или позволить оператору управлять этой кинетической энергией, чтобы гарантировать, что она не превысит энергетический уровень, при котором возникает вероятность того, что погрузочно-разгрузочная машина может быть выведена из потенциальной ямы, выражающей ее устойчивое состояние.
Краткое описание чертежей
Изобретение будет лучше понято и его дальнейшие задачи, детали, признаки и преимущества станут более очевидны из последующего описания нескольких конкретных вариантов осуществления изобретения, которые приведены только в качестве неограничивающей иллюстрации со ссылкой на сопроводительные чертежи
- на ФИГ. 1 представлено схематическое изображение телескопического автопогрузчика, в котором могут быть реализованы варианты осуществления изобретения.
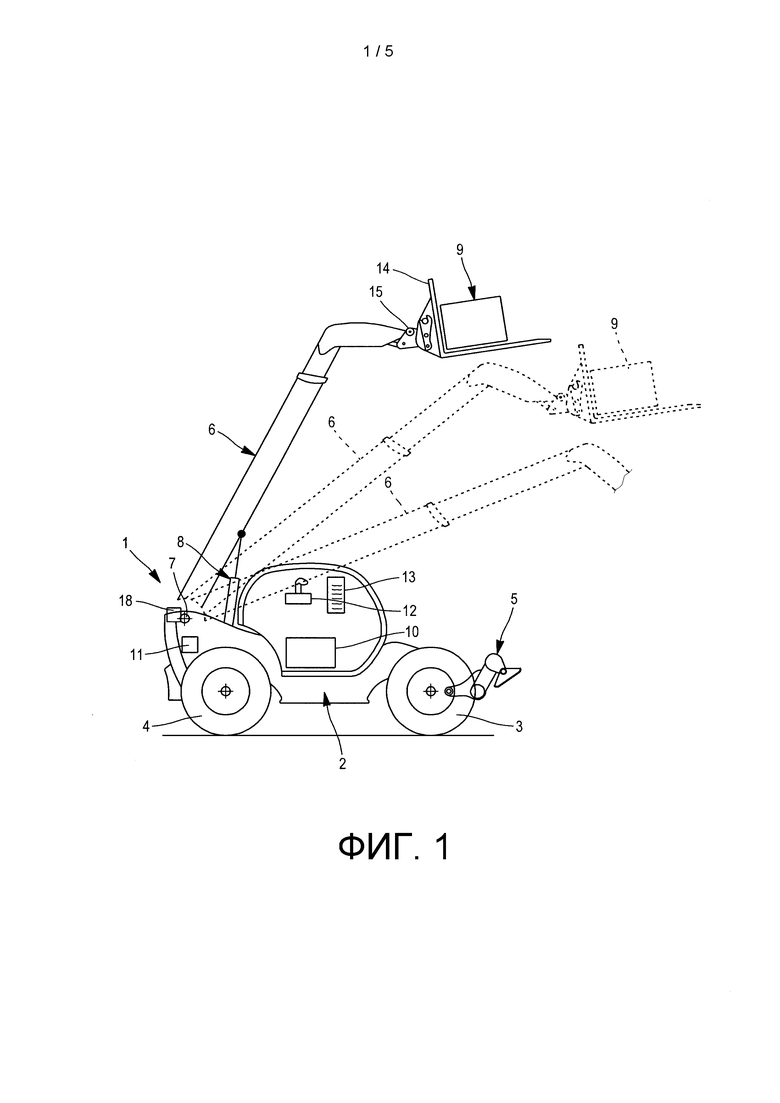
- на ФИГ. 2 представлена схема этапов, представляющая способ управления согласно первому варианту осуществления, который может быть использован в телескопическом автопогрузчике.
- на ФИГ. 3 представлена схема этапов, представляющая способ управления согласно второму варианту осуществления, который может быть использован в телескопическом автопогрузчике.
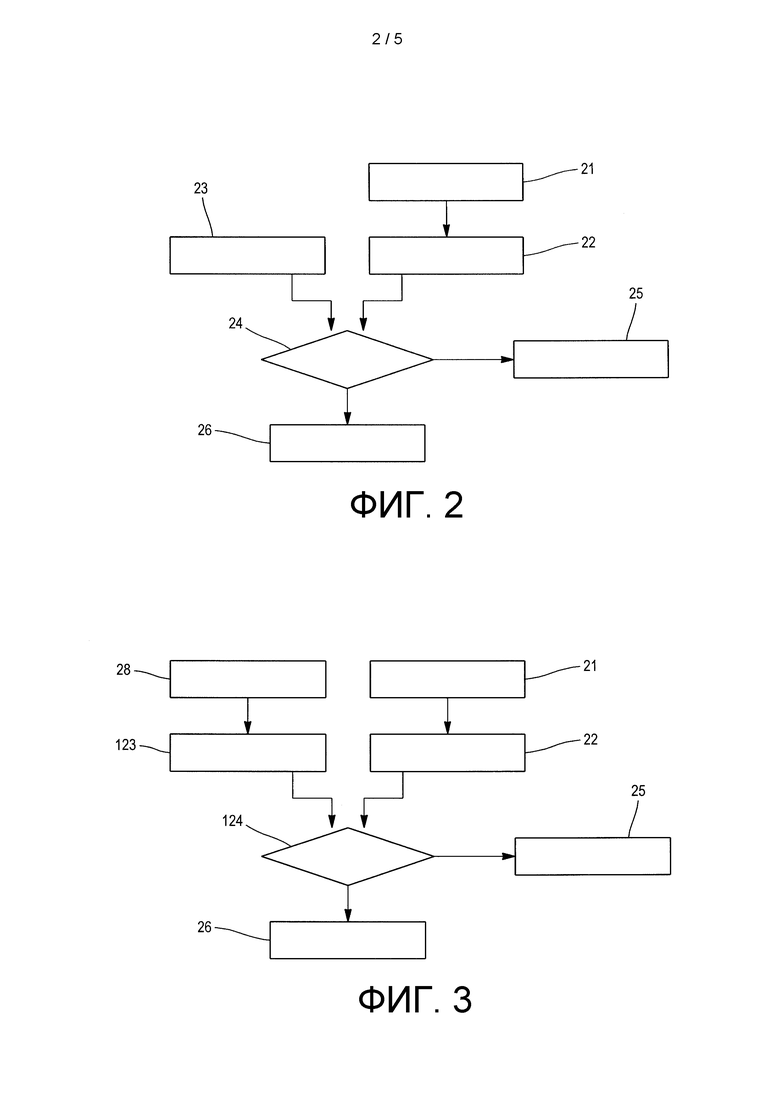
- на ФИГ. 4 представлено схематическое изображение гидравлического привода согласно первому варианту осуществления, который может быть использован в телескопическом автопогрузчике.
- на ФИГ. 5 представлено схематическое изображение гидравлического привода согласно второму варианту осуществления, который может быть использован на телескопическом автопогрузчике.
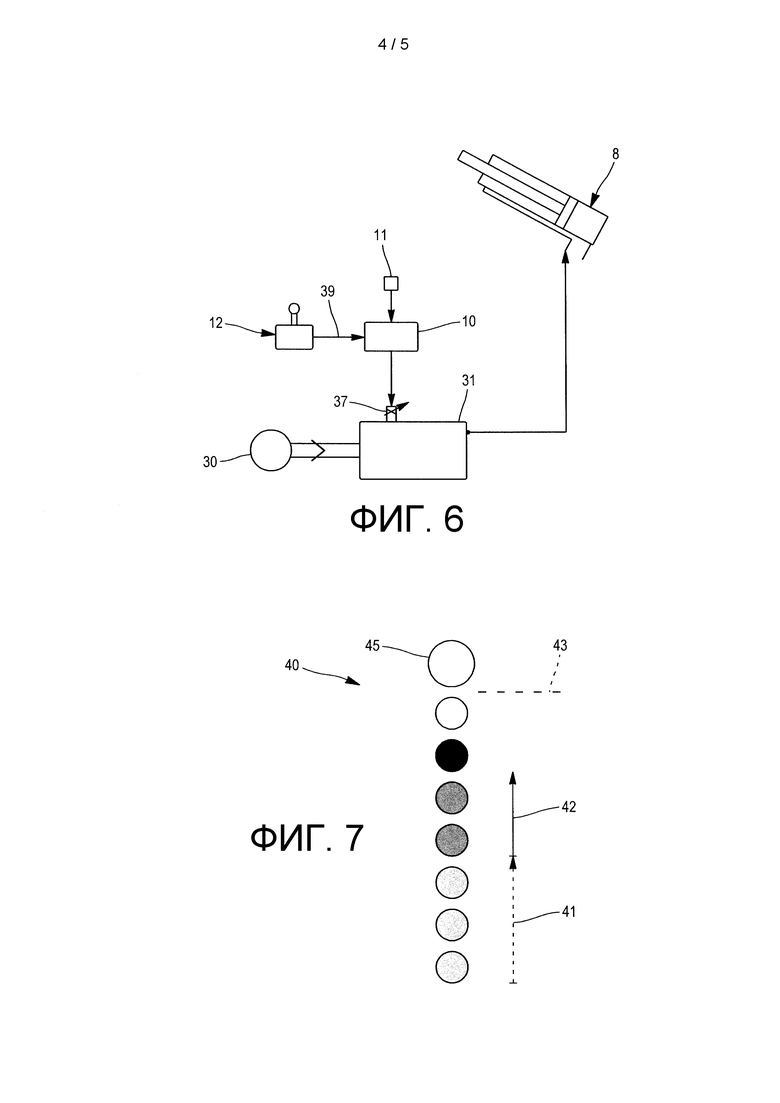
- на ФИГ. 6 представлено схематическое изображение гидравлического привода согласно третьему варианту осуществления, который может быть использован на телескопическом автопогрузчике.
- на ФИГ. 7 представлено схематическое изображение сигнального устройства, которое может быть использовано в телескопическом автопогрузчике.
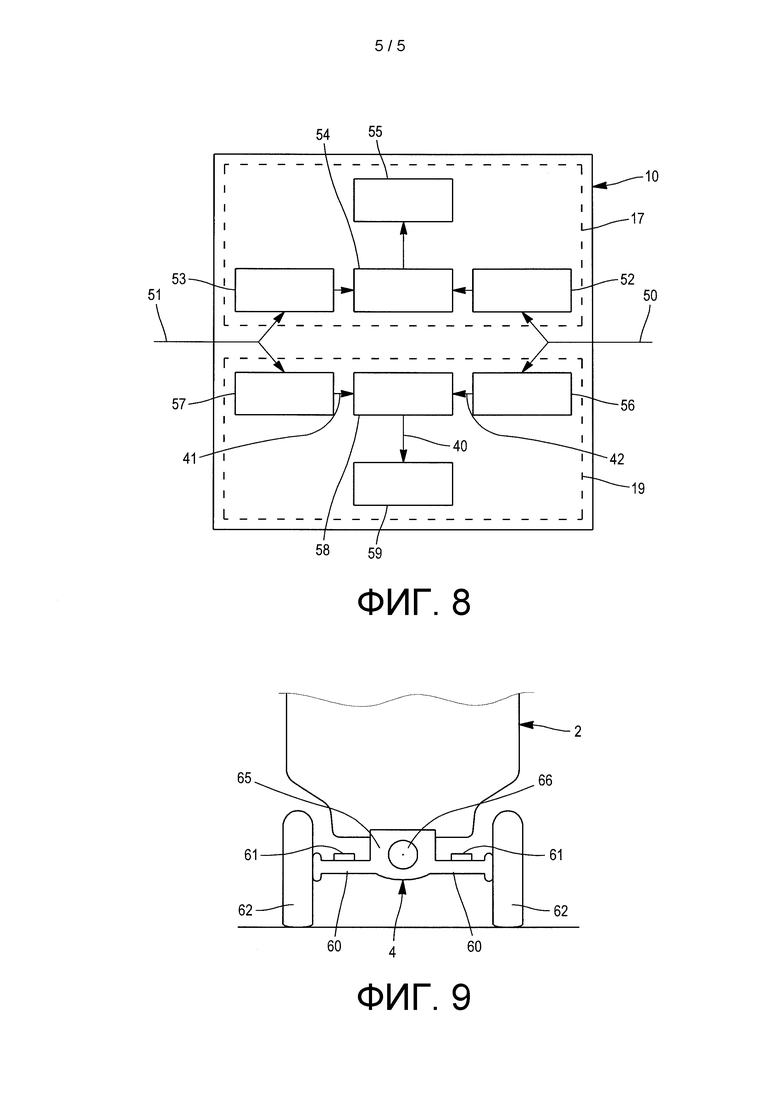
- на ФИГ. 8 представлено изображение функциональной схемы блока управления, который может быть использован в телескопическом автопогрузчике.
- на ФИГ. 9 представлено схематическое изображение балки колесной опоры, оснащенной экстензометром, который может действовать в качестве устройства указателя опрокидывающего момента.
Осуществление изобретения
Далее в настоящем документе будут описаны варианты осуществления погрузочно-разгрузочной машины, которая представлена в виде передвижного телескопического автопогрузчика, поддерживающего погрузочно-разгрузочную стрелу, выступающую в направлении передней части транспортного средства. В данной конфигурации риск опрокидывания проявляется в переднем направлении вокруг оси опрокидывания, образованной передними колесами транспортного средства. Следовательно, контроль этого риска опрокидывания и управление им включают учет сил инерции, ориентированных в переднем направлении, то есть перемещений, связанных со значительным количеством перемещения в этом направлении.
В погрузочно-разгрузочной машине с другой конфигурацией ось опрокидывания может быть расположена иначе. Тогда перемещения, которые необходимо учитывать, необходимо выбирать в зависимости от местоположения этой оси.
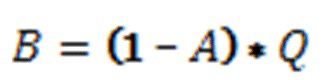
Как показано на ФИГ. 1, телескопический автопогрузчик 1 содержит раму 2, опирающуюся на землю посредством передней оси 3 и задней оси 4. Для подъема передней оси 3 могут быть дополнительно установлены стабилизирующие опоры 5, и в этом случае стабилизирующие опоры 5 образуют ось опрокидывания вперед. Благодаря своей конструкции и механическим элементам, которые на нее опираются, рама 2 имеет относительно большую массу в соответствии с известной технологией.
Погрузочно-разгрузочная стрела 6 установлена на раме 2 шарнирно относительно горизонтальной оси 7. Привод подъема, например, гидравлический цилиндр 8, позволяет погрузочно-разгрузочной стреле 6 двигаться вверх и вниз относительно горизонтальной оси 7 под управлением системы управления. Система управления содержит блок 10 управления и компонент 12 управления, выполненный управляемым оператором, которые схематично показаны на ФИГ. 1.
На ФИГ. 1 показана погрузочно-разгрузочная стрела 6 и полезная нагрузка 9 в верхнем положении сплошной линией, и в нескольких из нижних положений пунктирной линией. При прочих равных условиях статический опрокидывающий момент, создаваемый погрузочно-разгрузочной стрелой 6 в переднем направлении, увеличивается, когда ее положение снижается в сторону горизонтального положения.
Приблизительное измерение этого статического опрокидывающего момента может быть получено с использованием датчика указателя опрокидывающего момента, который может быть размещен различными способами. На ФИГ.1 показан датчик 11 указателя опрокидывающего момента, расположенный на задней оси в соответствии с известной технологией.
Датчик 11 указателя опрокидывающего момента вырабатывает измерительный сигнал, который представляет запас устойчивости погрузочно-разгрузочной машины 1 относительно оси опрокидывания.
Известный способ контроля риска опрокидывания и управления им включает обработку измерительного сигнала датчика 11 указателя опрокидывающего момента с использованием блока 10 управления, чтобы, с одной стороны, визуально отображать в кабине машины указатель устойчивости, например, на светящейся панели 13 отображения, расположенной в кабине, и, с другой стороны, прерывать опускание погрузочно-разгрузочной стрелы 6, когда измерительный сигнал падает ниже заданного порогового значения. Однако из-за сил инерции, возникающих прерыванием перемещения, этот способ требует установки порогового значения с высоким запасом безопасности, что ограничивает возможности машины, и/или управления автоматическим замедлением перемещения перед прерыванием, что не позволяет оператору управлять скоростью.
Чтобы избежать этого, система управления может реализовывать способы управления, которые будут описаны со ссылкой на ФИГ. 2 и 3. Эти способы управления основаны на принципе, позволяющем оператору управлять перемещением погрузочно-разгрузочной стрелы 6, используя компонент 12 управления. В частности, система управления регулирует скорость перемещения, которое подлежит выполнению, в зависимости от запроса на перемещение, вырабатываемого оператором путем приведения в действие компонента 12 управления, и, в частности, количественной величины, вырабатываемой воздействием пользователя на компонент 12 управления, и представляющей уровень скорости, запрошенный пользователем. Например, количественная величина представляет собой угол наклона поворотного рычага компонента 12 управления, причем больший угол представляет запрос более высокой скорости, а нулевой угол наклона (нейтральное положение) представляет запрос на остановку. Система управления немедленно останавливает перемещение по запросу на остановку, вырабатываемому оператором.
На ФИГ. 2 показан способ управления с использованием измерения эффективной скорости погрузочно-разгрузочной стрелы 6. На ФИГ. 3 показан способ управления с использованием запроса скорости, вырабатываемого оператором. Эти способы могут выполняться в цикле с помощью электронной схемы.
Способ по ФИГ. 2 включает следующие этапы:
Этап 21: получение измерительного сигнала от датчика 11 указателя опрокидывающего момента.
Этап 22: определения допустимого порогового значения скорости в зависимости от измерительного сигнала. Это определение может основываться на считывании таблицы, хранящейся в памяти и содержащей пороговые значения, связанные со значениями измерительного сигнала или диапазонами значений измерительного сигнала.
Этап 23: получение измерительного сигнала от датчика скорости погрузочно-разгрузочной стрелы 6. Это датчик скорости представляет собой, например, датчик 18 угловой скорости, показанный на ФИГ. 1.
Этап 24: сравнение скорости погрузочно-разгрузочной стрелы 6 с допустимым порогом скорости.
На этапе 25, если измеренная скорость меньше допустимого порогового значения скорости: выполнение или продолжение выполнения перемещения в соответствии с запросом на перемещение, вырабатываемым оператором.
На этапе 26, если измеренная скорость больше допустимого порогового значения скорости: остановка или предотвращение перемещения погрузочно-разгрузочной стрелы 6, несмотря на запрос оператора. Эта остановка или предотвращение отражает тот факт, что оператор запросил слишком высокую скорость перемещения относительно запаса устойчивости, имеющегося в данный момент. Система управления не разрешает выполнение этого запроса. Другими словами, если перемещение продолжается, оно немедленно будет остановлено, а если перемещение не продолжается, состояние остановки будет сохраняться, несмотря на запрос оператора.
На основе состояния остановки, вырабатываемом на этапе 26, предпочтительно предусмотреть принудительное действие сброса оператором до того, как снова может быть отправлен запрос на перемещение, например, новый запрос с более низким уровнем скорости. Данное действие сброса предпочтительно может быть выполнено посредством компонента 12 управления путем измерения эргономики. Например, действие сброса включает в себя возврат поворотного рычага в нейтральное положение перед повторным наклоном его вперед.
Допустимое пороговое значение скорости, считываемое на этапе 22, может быть определен путем испытаний. С качественной точки зрения, этот допустимое пороговое значение скорости представляет количество перемещения или кинетическую энергию, которую погрузочно-разгрузочный автопогрузчик 1 способен воспринять без опрокидывания в случае, если перемещение погрузочно-разгрузочной стрелы 6 мгновенно остановлено. Этот допустимое пороговое значение скорости, следовательно, уменьшается во время опускания погрузочно-разгрузочной стрелы 6, так как запас устойчивости уменьшается, на что указывает измерение датчика 11 указателя опрокидывающего момента. В другом варианте осуществления допустимое пороговое значение скорости можно определять путем вычисления и сохранять, или можно определять путем вычисления в режиме реального времени на этапе 22.
Таким образом, один из описанных выше способов управления заключается в том, что, начиная с верхнего положения, показанного на ФИГ. 1, если оператор выдает запрос на постоянное опускание, перемещение выполняется с постоянной скоростью, пока допустимое пороговое значение скорости остается выше этой скорости, и мгновенно прерывается при превышении допустимого порогового значения скорости.
Поскольку система управления одинаково реагирует на запрос данного перемещения и, в частности, не изменяет скорость выполняемого перемещения по данному запросу, оператор может опытным путем досконально узнать отклик машины и может наилучшим образом настроить свой запрос в соответствии с обстоятельствами.
На ФИГ. 3, этапы, измененные по сравнению со способом по ФИГ. 2, используют ссылочные обозначения как на ФИГ. 2, увеличенные на 100. Неизмененные этапы имеют те же ссылочные обозначения и не описаны снова.
Этап 28: получение сигнала запроса на перемещение, вырабатываемого оператором, например, в виде электрического сигнала.
Этап 123: определение запрошенной скорости перемещения в зависимости от сигнала запроса на перемещение. Например, запрошенная скорость закодирована в амплитуде или другом параметре сигнала запроса на перемещение.
Этап 124: сравнение запрошенной скорости перемещения с допустимым порогом скорости.
Выполнение этапа 25, если запрошенная скорость меньше допустимого порогового значения скорости.
Выполнение этапа 26, если запрошенная скорость больше допустимого порогового значения скорости.
Следует понимать, что в этих способах не выполняется никакого перемещения, кроме перемещения в соответствии с запросом на перемещение, вырабатываемым оператором.
Система управления для выполнения такого способа управления может быть реализована различными способами. Ниже будут описаны три варианта осуществления, как показано на ФИГ. 4 - 6.
Система управления на ФИГ. 4 подходит для реализации способа по ФИГ. 2. На ФИГ. 4 показан гидравлический цилиндр 8, источник 30 гидравлического давления, гидравлический распределитель 31, размещенный между ними для управления гидравлическим потоком, который подлежащий подаче в гидравлический цилиндр 8, компонент 12 управления в виде рычага, напрямую соединенного с задвижкой гидравлического распределителя 31, блок 10 управления, датчик 11 указателя опрокидывающего момента и датчик 18 угловой скорости, соединенный с блоком 10 управления, и электромагнитный клапан 32, размещенный между гидравлическим распределителем 31 и гидравлическим цилиндром 8. Электромагнитный клапан 32 управляется блоком 10 управления.
В этой системе, поскольку блок управления не может предотвратить открытие гидравлического распределителя 31 при действии пользователя в случае, если скорость является слишком высокой, используетcя электромагнитный клапан 32 для прерывания гидравлического потока, чтобы мгновенно остановить перемещение на этапе 26.
Электромагнитный клапан 32 предпочтительно является клапаном постепенного запуска. Использование клапана постепенного запуска предотвращает ситуацию, когда возможное возобновление перемещения оператором после действия сброса произойдет слишком быстро по сравнению с измерением скорости, выполняемым датчиком 18 скорости.
На ФИГ. 5 элементы, аналогичные или идентичные элементам на ФИГ. 4, имеют одинаковые ссылочные позиции. В этом варианте осуществления гидравлический распределитель 31 не имеет механического управления, связанного непосредственно с управляющим элементом 12, а имеет гидравлическое управление. В частности, гидравлический поток 38, соответствующий перемещению вниз погрузочно-разгрузочной стрелы 6, может быть обеспечен путем подачи управляющего давления 36 на управляющее отверстие 35.
Управляющий компонент 12 соединен с управляющим клапаном 34, который управляет этим управляющим давлением. Блок 10 управления выполнен управляемым электромагнитным клапаном 33, расположенным между управляющим клапаном 34 и управляющим отверстием 35. Таким образом, на этапе 26 блок 10 управления может переключить клапан 33 для возврата гидравлического распределителя 31 в нейтральное положение. Предпочтительно электромагнитный клапан 33 является клапаном постепенного запуска.
На ФИГ. 6 система управления пригодна для реализации способа, показанного на ФИГ. 3. Компонент 12 управления генерирует электрические сигналы 39 запроса и гидравлический распределитель 31 управляется с использованием электрического сигнала, подаваемого на управляющее отверстие 37. Блок 10 управления размещен между управляющим элементом 12 и гидравлическим распределителем 31 и, следовательно, может непосредственно управлять гидравлическим распределителем 31 на этапах 25 и 26. Датчик скорости погрузочно-разгрузочной стрелы 6 не является существенным в данном варианте осуществления, так как блок 10 управления может определять запрашиваемую скорость непосредственно из сигнала 39 запроса.
Могут быть предусмотрены и другие системы управления в зависимости от характера привода, которым нужно управлять. Погрузочно-разгрузочная стрела 6 может иметь другие степени свободы перемещения, помимо поворота вокруг горизонтальной оси 7, в частности, степень свободы телескопического линейного перемещения и степень свободы поворота рабочего органа вокруг горизонтальной оси 15. Описанные выше способы управления могут использоваться для управления одним или более из этих степеней свободы перемещения. При наличии нескольких степеней свободы перемещения не все приводы, отвечающие за выполнение соответствующих перемещений, обязательно управляются одинаковым образом.
На ФИГ. 9 представлен вариант осуществления задней оси 4 телескопического автопогрузчика 1. Задняя ось 4 содержит две балки 60 колесной опоры, опирающиеся на задние колеса 62. Одна или каждая из балок 60 колесной опоры снабжена экстензометром 61, выполненным с возможностью измерения деформаций изгиба балки 60 колесной опоры. Более конкретно, экстензометр измеряет изменение по длине между двумя отдельными границами на балке 60 колесной опоры. Измерительные сигналы экстензометров 61 могут использоваться для формирования сигнала указателя опрокидывающего момента, например, в виде среднего двух измерительных сигналов. В альтернативном варианте можно использовать один экстензометр 61 для генерации сигнала указателя опрокидывающего момента. Задняя ось 4 предпочтительно соединена маятниковым образом с рамой 2 посредством шарнира 66, имеющего продольную ось, проходящую через центральную часть 65 оси.
Как показано на ФИГ. 7, ниже будет описан способ сигнализации, который может быть использован в телескопическом автопогрузчике 1 для помощи оператору в управлении погрузочно-разгрузочной стрелой 6 безопасным и эффективным образом.
На ФИГ. 7 представлен сигнал 40 риска опрокидывания, который может отображаться на панели 13 отображения для представления риска опрокидывания на визуальной шкале в зависимости от текущего состояния телескопического автопогрузчика 1. С этой целью амплитуда сигнала риска опрокидывания, регулирующая высоту шкалы, которая должна отображаться, например, некоторым количеством ламп, которые должны светиться, в совокупности содержит реальный вклад 41, зависящий от измерительного сигнала, вырабатываемого датчиком 11 указателя опрокидывающего момента, и виртуальный вклад 42, зависящий от величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы 6, например, запрошенную скорость перемещения, определенную на этапе 123 по ФИГ. 3, или действительную скорость перемещения, измеренную на этапе 23 по ФИГ. 2. Последний уровень 45 шкалы соответствует, например, автоматическому прерыванию перемещения блоком 10 управления.
В одном варианте осуществления вклады сигнала 40 риска опрокидывания могут вычисляться следующим образом. Реальный вклад 41 может быть обратно пропорционален величине, измеренной датчиком 11 указателя опрокидывающего момента, и может быть градуирован по шкале от 0 до 1, где 0 соответствует нормальной величине опрокидывающего момента, а 1 соответствует максимальной величине опрокидывающего момента, т.е. состоянию, в котором больше невозможно дальше опускать погрузочно-разгрузочную стрелу 6 даже на низкой скорости.
Виртуальный вклад 42 может быть равен:
 ,
,
где A обозначает реальный вклад 41, располагающийся между 0 и 1, а Q обозначает отношение скорости запрошенного или выполняемого в данный момент перемещения к допустимой пороговой скорости в тот же момент, то есть отношение, которое по определению остается ниже 1.
При генерировании сигнала 40 риска опрокидывания таким образом существует оптимальный уровень, схематически показанный позицией 43, который соответствует максимальной скорости, которая может быть достигнута без прерывания перемещения блоком 10 управления. Следовательно, оператор может использовать сигнал 40 риска опрокидывания в качестве визуального ориентира для адаптации своего запроса на перемещение, чтобы оставаться вблизи оптимального уровня 43 во время опускания погрузочно-разгрузочной стрелы 6.
На ФИГ. 8 представлена функциональная схема варианта осуществления блока 10 управления. Он содержит функциональный модуль 17 управления и функциональный модуль 19 сигнализации, которые могут работать с двумя входными сигналами. Первый входной сигнал 50 представляет собой сигнал, указывающий скорость выполняемого или подлежащего выполнению перемещения, например сигнал запроса, вырабатываемый элементом 12 управления, или измерительный сигнал датчика 18 скорости. Второй входной сигнал 51 представляет собой сигнал, указывающий запас статической устойчивости машины, например, измерительный сигнал датчика 11 указателя опрокидывающего момента.
Функциональный модуль 17 управления содержит:
- модуль 52 вычисления скорости, выполненный с возможностью вычисления значения выполняемой или запрошенной скорости на основе первого входного сигнала 50;
- модуль 53 вычисления порогового значения скорости, выполненный с возможностью определения допустимого порогового значения скорости на основе второго входного сигнала 51;
- модуль 54 сравнения для сравнения величины выполняемой или запрошенной скорости с допустимым порогом скорости; и
- модуль 55 управления для управления исполнительным механизмом подъема в зависимости от результата сравнения, либо непосредственно, или посредством управления промежуточными элементами управления (в частности, клапаном 32, клапаном 33, распределителем 31).
-
Модуль 19 функциональной сигнализации содержит:
- модуль 56 вычисления виртуального вклада, выполненный с возможностью вычисления виртуального вклада 42 на основе первого входного сигнала 50;
- модуль 57 вычисления реального вклада, выполненный с возможностью вычисления реального вклада 41 на основе второго входного сигнала 51;
- модуль 58 сумматора для суммирования реального вклада 41 и виртуального вклада 42; и
- модуль 59 управления для управления панелью 13 отображения в зависимости от сигнала 40 риска опрокидывания.
Сигнал 40 риска опрокидывания может быть отправлен оператору в визуальных формах, отличных от шкалы, например цветовым кодом. Сигнал 40 риска опрокидывания может быть отправлен оператору в звуковой или иной форме.
Некоторые элементы, которые показаны, в частности блок управления, могут быть изготовлены в различных формах, цельными или по отдельности, посредством аппаратных и/или программных компонентов. Используемые аппаратные компоненты представляют собой специализированные интегральные схемы ASIC, программируемые логические матрицы FPGA или микропроцессоры. Программные компоненты могут быть написаны с использованием различных языков программирования, например, C, C ++, Java или VHDL. Этот список не является исчерпывающим.
Способы и системы, описанные выше в контексте телескопического автопогрузчика, применимы к другим погрузочно-разгрузочным машинам.
Хотя изобретение было описано со ссылкой на несколько конкретных вариантов осуществления, очевидно, что оно никоим образом не ограничено этим, и что оно включает все технические эквиваленты описанных средств и любые их комбинации, если они попадают в объем изобретения.
Использование глагола “содержит” или “включает” и его сопряженных форм не исключает наличия элементов или этапов, отличающихся от указанных в формуле изобретения. Использование единственного числа для элемента или этапа не исключает наличия множества таких элементов или этапов, если не указано иное.
В формуле изобретения никакое ссылочное обозначение в скобках не может истолковываться, как ограничивающее формулу изобретения.
Изобретение относится к рабочим погрузочно-разгрузочным машинам. Управление исполнительным устройством в погрузочно-разгрузочной машине включает сравнение (24) величины, представляющей скорость выполняемого или подлежащего выполнению перемещения по сигналу запроса на перемещение, c пороговым значением, представляющим допустимую максимальную скорость, и управление исполнительным устройством в зависимости от результата указанного сравнения. Далее выполняют или продолжают (25) перемещение погрузочно-разгрузочной стрелы, пока величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, меньше указанного порогового значения, и предотвращают или останавливают (26) перемещение погрузочно-разгрузочной стрелы, как только величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, становится больше указанного порогового значения. Достигается надежное управление устойчивостью машины. 2 н. и 13 з.п. ф-лы, 9 ил.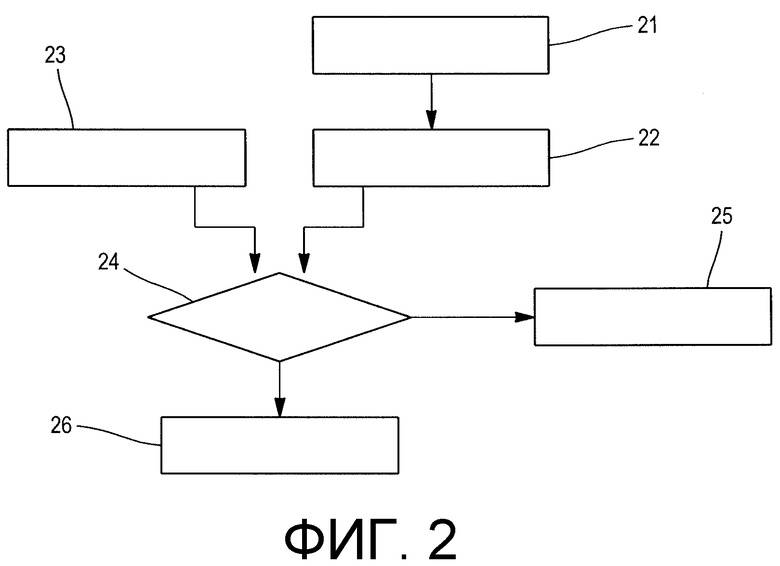
1. Погрузочно-разгрузочная машина (1), содержащая:
основной корпус (2);
погрузочно-разгрузочную стрелу (6), предназначенную для приема груза, подлежащего перемещению;
исполнительное устройство (8), выполненное с возможностью осуществления перемещения погрузочно-разгрузочной стрелы относительно основного корпуса;
компонент (12) управления, выполненный управляемым пользователем, с тем чтобы вырабатывать сигнал запроса на перемещение, предназначенный для указания исполнительному устройству (8) выполнить или остановить перемещение погрузочно-разгрузочной стрелы исполнительным устройством по сигналу запроса на перемещение, причем сигнал запроса на перемещение имеет параметр, представляющий скорость перемещения, которое подлежит выполнению, при этом компонент (12) управления выполнен управляемым пользователем, чтобы настраивать указанный параметр сигнала запроса на перемещение из множества значений параметра, соответственно представляющих состояние остановки и множество значений скорости;
блок (10) управления, выполненный с возможностью по сигналу запроса на перемещение сравнивать величину, представляющую скорость выполняемого или подлежащего выполнению перемещения, с пороговым значением, представляющим максимальную допустимую скорость, и управлять исполнительным устройством в зависимости от результата указанного сравнения, чтобы:
выполнять или продолжать (25) перемещение погрузочно-разгрузочной стрелы, пока величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, меньше указанного порогового значения; и
предотвращать или останавливать (26) перемещение погрузочно-разгрузочной стрелы, как только величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, становится больше указанного порогового значения.
2. Машина по п. 1, дополнительно содержащая датчик (11) указателя опрокидывающего момента, чувствительный к величине, указывающей опрокидывающий момент, приложенный на основной корпус относительно оси опрокидывания, и модуль определения порогового значения, выполненный с возможностью определения порогового значения, представляющего максимальную допустимую скорость, в зависимости от измерительного сигнала, выдаваемого датчиком (11) указателя опрокидывающего момента.
3. Машина по п. 2, в которой блок (10) управления также выполнен с возможностью формирования сигнала (40) риска опрокидывания, который в совокупности содержит:
реальный вклад (41), зависящий от измерительного сигнала (51), выдаваемого датчиком указателя опрокидывающего момента; и
виртуальный вклад (42), зависящий от указанной величины, представляющей скорость перемещения погрузочно-разгрузочной стрелы, которое выполняется или подлежит выполнению исполнительным устройством.
4. Машина по п. 2 или 3, в которой пороговое значение, представляющее допустимую максимальную скорость, имеет тенденцию к снижению, когда опрокидывающий момент увеличивается.
5. Машина по любому из пп. 1 - 4, в которой исполнительное устройство (8) выполнено с возможностью выполнения поворотного перемещения погрузочно-разгрузочной стрелы вокруг оси (7), которая по существу является горизонтальной относительно основного корпуса.
6. Погрузочно-разгрузочная машина по любому из пп. 1 - 5, дополнительно содержащая средство (18) измерения для измерения мгновенной скорости погрузочно-разгрузочной стрелы относительно основного корпуса, причем указанное сравнение представляет собой сравнение указанной мгновенной скорости и указанного порогового значения.
7. Погрузочно-разгрузочная машина по любому из пп. 1 - 5, в которой блок (10) управления выполнен с возможностью приема сигнала (39, 50) запроса на перемещение, вырабатываемого компонентом управления, и указанное сравнение является сравнением параметра сигнала запроса на перемещение и указанного порогового значения.
8. Машина по любому из пп. 1 - 7, в которой компонент (12) управления, выполненный управляемым пользователем, соединен с блоком (10) управления, чтобы снабжать блок управления сигналом (39, 50) запроса на перемещение в виде электрического сигнала.
9. Машина по любому из пп. 1 - 8, в которой исполнительное устройство (8) содержит гидравлический привод и устройство (31) с переменным расходом для регулирования гидравлического потока, подлежащего подаче в гидравлический привод.
10. Машина по п. 9, в которой компонент (12) управления, выполненный управляемым пользователем, фунционально соединен с устройством (31) с переменным расходом, так чтобы перемещать компонент для регулирования расхода устройства с переменным расходом в зависимости от воздействия пользователя на компонент управления, и в котором исполнительное устройство дополнительно содержит электромагнитный клапан (32, 33), расположенный между устройством (31) с переменным расходом и гидравлическим приводом (8) или компонентом (12) управления, причем обеспечена возможность управления электромагнитным клапаном (32, 33) блоком управления, чтобы предотвращать или останавливать перемещение погрузочно-разгрузочной стрелы, как только величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, становится больше указанного порогового значения.
11. Машина по п. 10, в которой электромагнитный клапан (32, 33) является клапаном постепенного запуска.
12. Машина по любому из пп. 9 - 11, в которой устройство (31) с переменным расходом содержит пропорциональный распределитель.
13. Машина по п. 3, взятым в отдельности или в сочетании с пп. 4 - 12, дополнительно содержащая панель (13) отображения, соединенную с блоком (10) управления, для визуального отображения шкалы в зависимости от сигнала (40) риска опрокидывания.
14. Способ управления для управления исполнительным устройством (8) в погрузочно-разгрузочной машине (1), содержащей основной корпус (2) и погрузочно-разгрузочную стрелу (6), предназначенную для приема груза, подлежащего перемещению, причем исполнительное устройство выполнено с возможностью осуществления перемещения погрузочно-разгрузочной стрелы относительно основного корпуса;
при этом способ включает:
сравнение (24, 124) величины, представляющей скорость выполняемого или подлежащего выполнению перемещения по запросу на перемещение, с пороговым значением, представляющим допустимую максимальную скорость; и
управление исполнительным устройством в зависимости от результата указанного сравнения, чтобы:
выполнять или продолжать (25) перемещение погрузочно-разгрузочной стрелы, пока величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, меньше указанного порогового значения; и
предотвращать или останавливать (26) перемещение погрузочно-разгрузочной стрелы, как только величина, представляющая скорость выполняемого или подлежащего выполнению перемещения, становится больше указанного порогового значения.
15. Способ по п. 14, дополнительно включающий этап (28) приема сигнала запроса на перемещение, предназначенный для указания исполнительному устройству выполнить перемещение погрузочно-разгрузочной стрелы исполнительным устройством, причем сигнал запроса на перемещение имеет параметр, представляющий скорость перемещения, которое подлежит выполнению.
| Скважинный многочастотный интроскоп для исследования околоскважинного пространства | 2019 |
|
RU2733110C1 |
| Установка для переработки золошлаковых отходов | 2019 |
|
RU2736833C1 |
| СИСТЕМА РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ЕЕ ВАРИАНТЫ) | 2005 |
|
RU2307059C2 |
| СИНТЕТИЧЕСКИЙ КАНАТ | 2008 |
|
RU2390595C1 |

