Изобретение относится к области авиации, а именно беспилотному летательному аппарату вертикального взлета и посадки.
Беспилотные летательные аппараты (далее - БПЛА) в настоящее время привлекаются для решения широкого круга задач гражданского и военного назначения. К ним можно отнести транспортировку различных грузов, мониторинг объектов, выполнение геодезических задач, применение в сельском хозяйстве для обработки культур и т.д.
Некоторые виды применения БПЛА диктуют необходимость улучшения ряда летно-технических характеристик, к которым могут относиться дальность полета, высота полета, время барражирования, масса полезной нагрузки и др. При этом зачастую должна сохраняться возможность зависания на месте и осуществление вертикального взлета и посадки.
Классические мультироторные системы (коптеры, у которых основные функциональные элементы расположены в центре аппарата, а винтомоторные группы расположены по периметру), широко применяющиеся в настоящее время, имеют относительно невысокие показатели дальности полета и времени барражирования по сравнению с БПЛА вертикального взлета и посадки самолетного типа, однако имеют преимущества в продолжительности времени полета и маневренности на режимах зависания, а также в компактности.
Известен ряд летательных аппаратов, относящихся к конвертопланам, которые переходят из режима зависания в режим горизонтального полета путем поворота крыла или винтомоторных групп. Указанные летательные аппараты содержат поворотные механизмы, что усложняет конструкцию и делает ее менее надежной.
Известен ряд мультироторных аппаратов, у которых подъемная сила для осуществления горизонтального полета создается совместно винтами и фиксированным крылом. Заявляемое изобретение относится к этой группе летательных аппаратов.
В качестве наиболее близких аналогов можно выделить несколько технических решений.
Известен летательный аппарат (патент RU 2693362, опубликован 02.07.2019г.), содержащий два и более разнесенных продольных несущих элемента, два и более расположенных вдоль продольной оси летательного аппарата консолей крыла, многодвигательную силовую установку. Воздушные движители установлены под фиксированным углом к вертикальной плоскости в два и более ряда относительно продольной оси летательного аппарата.
Известен винтокрылый летательный аппарат (патент RU 2720746, опубликован 13.05.2020г.), содержащий переднее и заднее крылья, закрепленные на фюзеляже, винтомоторные группы, каждая из которых включает мотор и воздушный винт, установленные в трикоптерной конфигурации. Два воздушных винта закреплены на концах переднего крыла, один воздушный винт закреплен на хвостовой балке.
Известен винтокрылый беспилотный летательный аппарат тандемной схемы (патент RU 2771195, опубликован 28.04.2022г.), который содержит переднее крыло с установленными на его концах воздушными винтами, наклоненными вперед по полету, и заднее крыло. За задним крылом установлена поперечная балка с установленными на ее концах воздушными винтами.
К недостаткам описанных технических решений можно отметить достаточно большое энергопотребление в режиме горизонтального полета, так как оси винтомоторных групп, за счет работы которых осуществляется горизонтальный полет, отклонены от вертикальной оси на недостаточно большой угол, что приводит к расходу энергии на создание подъемной силы винтом, а не крылом.
Задачей настоящего изобретения является увеличение времени и дальности полета мультироторного аппарата при фиксируемой взлетной массе, без использования сложных кинематических механизмов и приводов для выполнения горизонтального полета.
Технический результат заявляемого изобретения - снижение массы конструкции, улучшение летных характеристик летательного аппарата и, как следствие, снижение энергопотребления на всех режимах полета.
Мультироторный летательный аппарат вертикального взлета и посадки содержит левый и правый боковые отсеки, соединенные внутренними боковыми стенками при помощи крыльев. На левом и правом боковых отсеках симметрично расположены при помощи жестких кронштейнов группы передних, задних, первых центральных и вторых центральных винтомоторных пар, содержащих по меньшей мере один винт и один двигатель. Первые центральные и вторые центральные винтомоторные пары закреплены на внешних боковых сторонах боковых отсеков под углом в противоположных направлениях от вертикальной оси летательного аппарата.
Боковые отсеки расположены зеркально относительно друг друга.
Между боковыми отсеками может располагаться центральный отсек, соединенный с боковыми отсеками крыльями.
В целях описания заявляемого технического решения использованы следующее определения:
Горизонтальный полет - полет «по-самолетному», при котором часть подъемной силы создается интегрированными в конструкцию крыльями.
Режим зависания - режим полета в «коптерной» конфигурации, в которой подъемная сила создается только винтами, перемещение в пространстве осуществляется без создания крыльями подъемной силы.
Винтомоторная пара - винты с электродвигателями, оси вращения которых находятся на одной прямой.
Далее сущность заявленного изобретения поясняется чертежами фиг. 1-7.
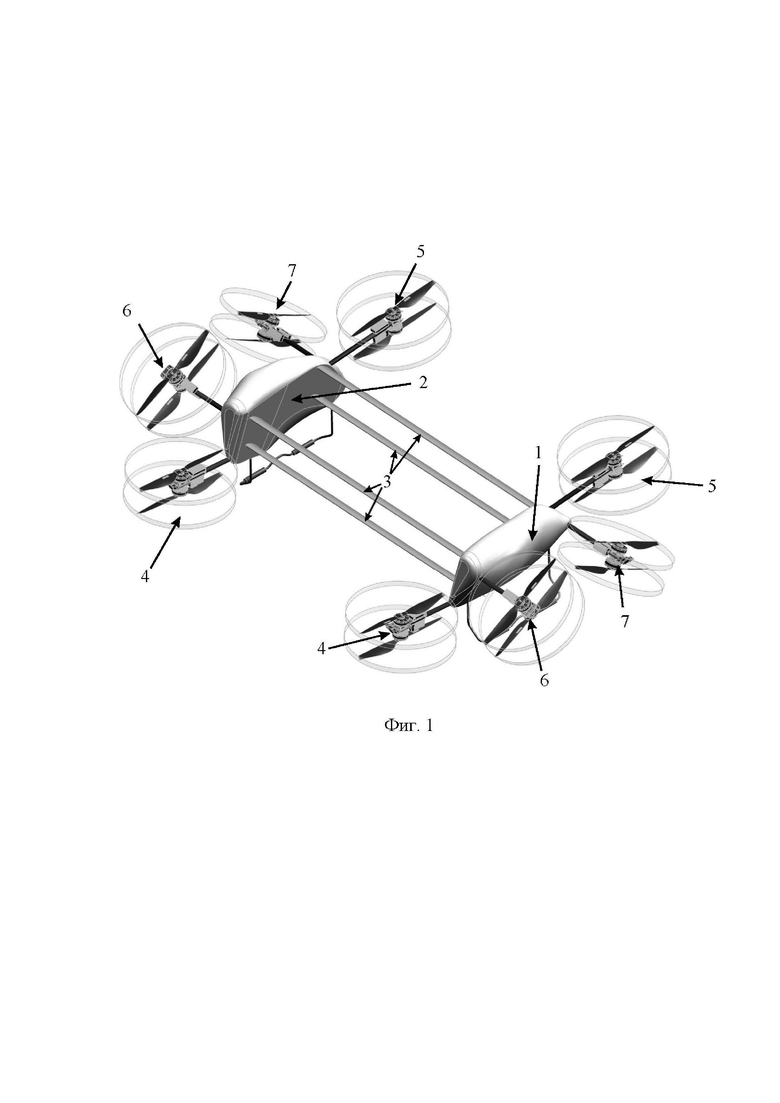
На фиг.1 представлен вид в изометрии летательного аппарата.
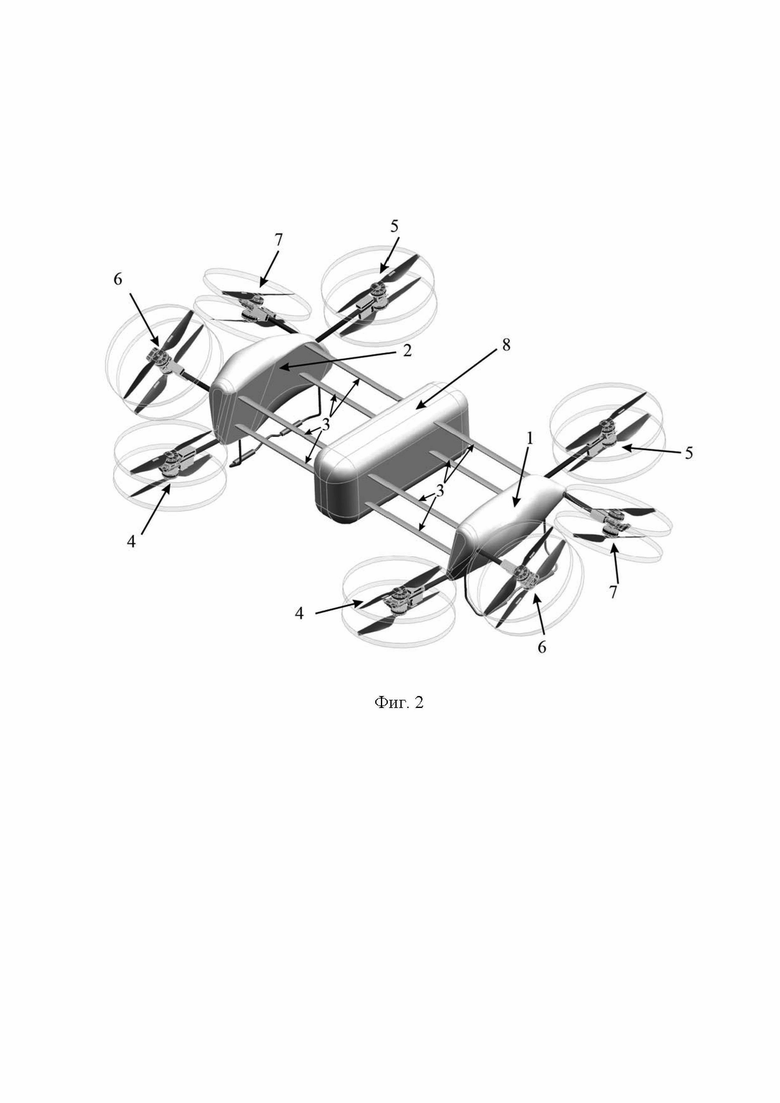
На фиг.2 представлен вид в изометрии летательного аппарата c центральным отсеком.
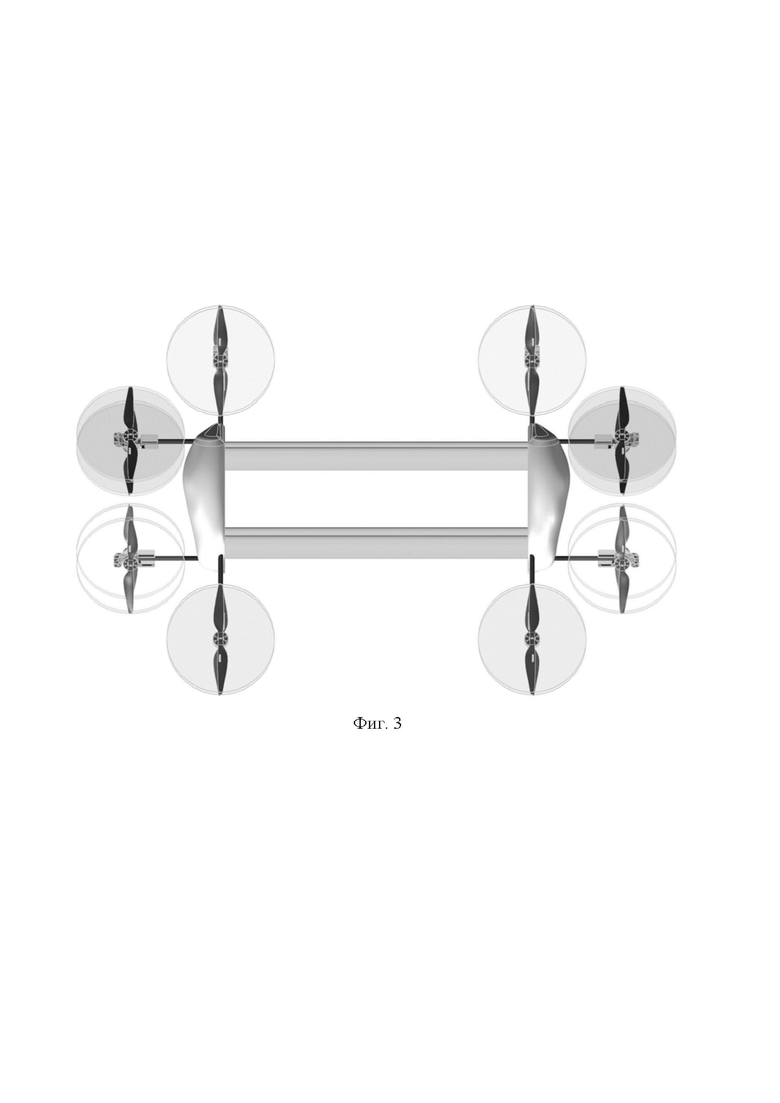
На фиг.3 представлен вид сверху летательного аппарата.
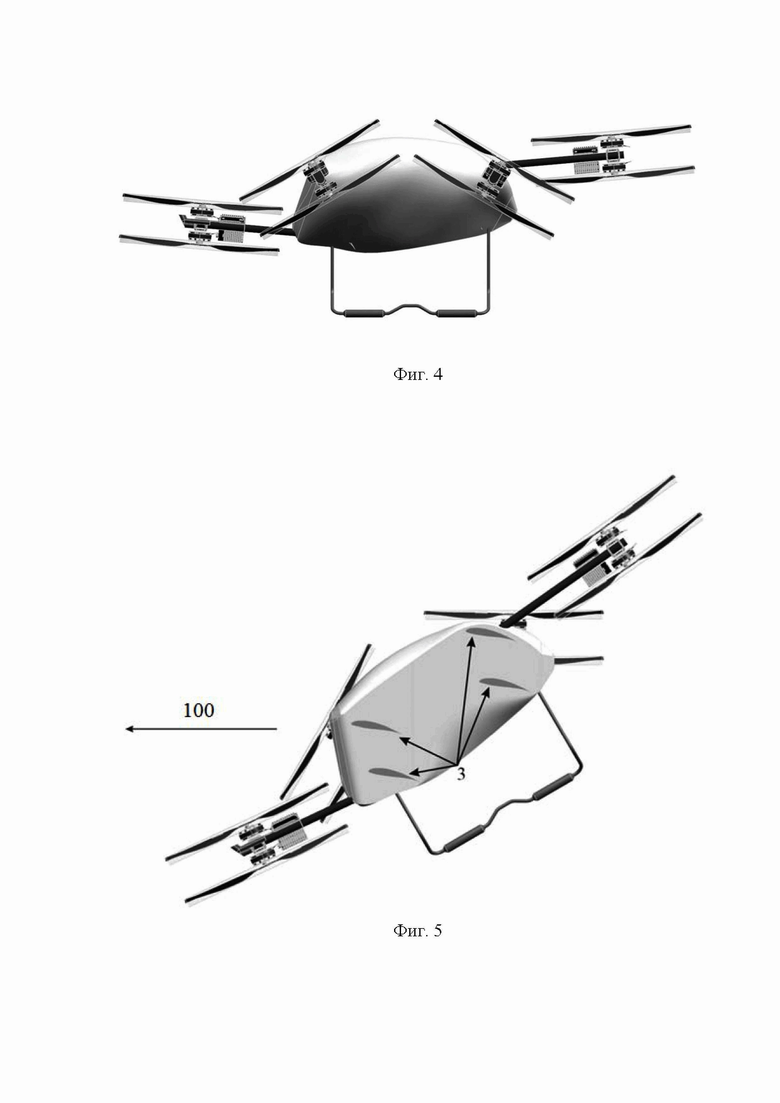
На фиг.4 представлен вид боку летательного аппарата.
На фиг.5 представлено поперечное сечение летательного аппарата по консолям крыла.
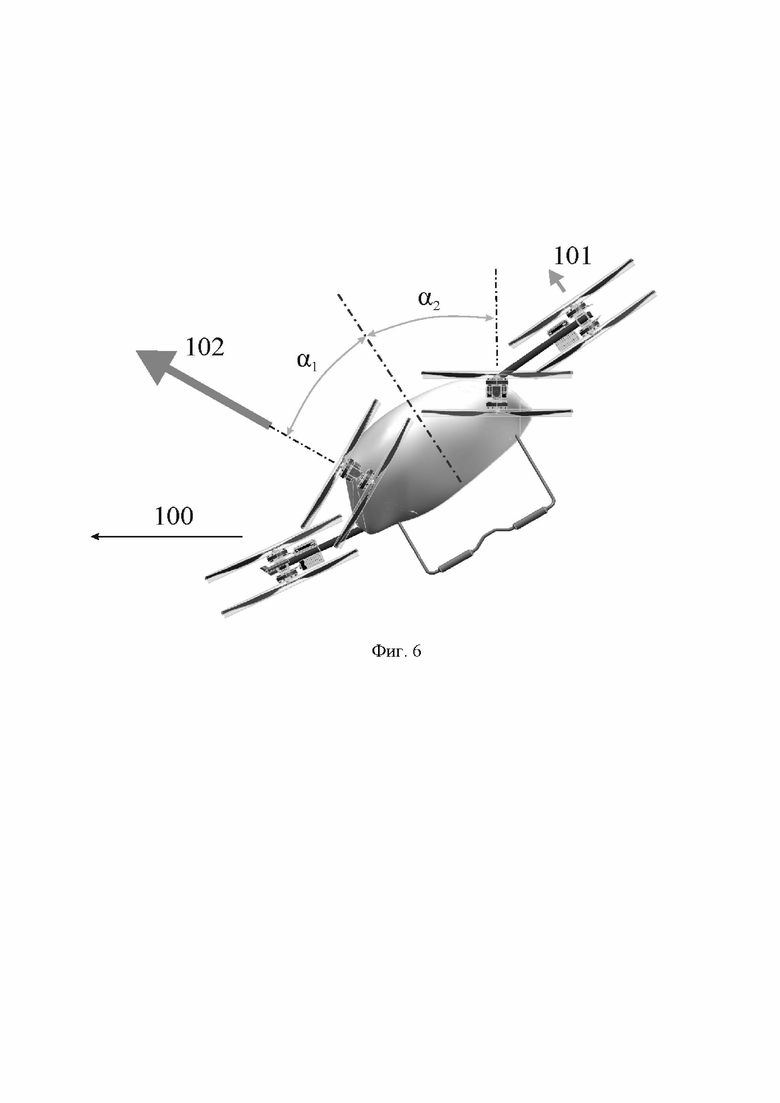
На фиг.6 отображена логика работы винтомоторных групп в режиме барражирования, вид сбоку.
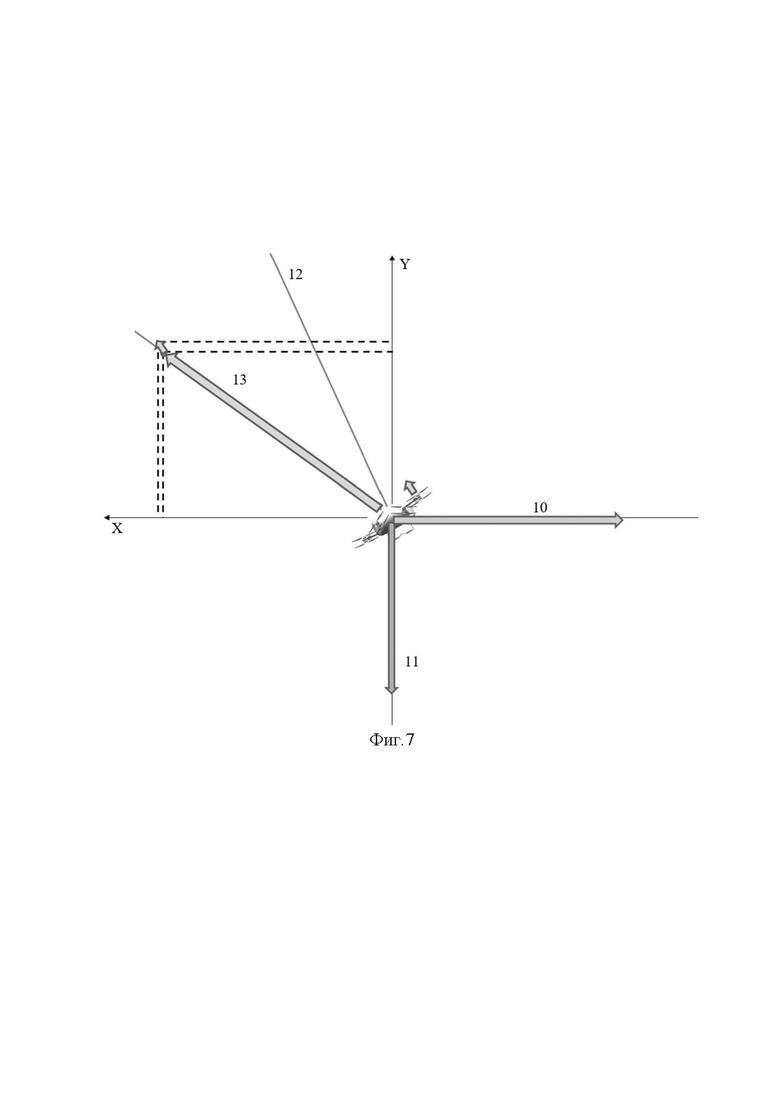
На фиг.7 изображено распределение действующих на летательный аппарат сил в горизонтальном полете.
На фигурах используются следующие обозначения:
1 - левый боковой отсек;
2 - правый боковой отсек;
3 - крылья;
4 - передняя винтомоторная пара;
5 - задняя винтомоторная пара;
6 - первая центральная винтомоторная пара;
7 - вторая центральная винтомоторная пара;
8 - центральный отсек;
10 - аэродинамическое сопротивление;
11 - некомпенсированный вес;
12 - вертикальная ось летательного аппарата;
13 - ось маршевых винтомоторных групп;
100 - направление полета;
101 - тяга задней винтомоторной группы при режиме горизонтального полета;
102 - тяга первой центральной винтомоторной группы при режиме горизонтального полета.
Мультироторный летательный аппарат вертикального взлета и посадки содержит левый (1) и правый (2) боковые отсеки, между внутренними боковыми стенками которых расположены крылья (3), по меньшей мере четыре группы винтомоторных пар, представляющие собой группу передних (4) винтомоторных пар, группу задних (5) винтомоторных пар, группу первых центральных (6) винтомоторных пар и группу вторых центральных (7) винтомоторных пар. Каждая винтомоторная пара включает в себя моторы и воздушные винты. Каждая винтомоторная пара закреплена двигателем при помощи жесткого кронштейна на боковых отсеках (1) и (2) (см. фиг.4).
Передние (4) винтомоторные пары закреплены при помощи кронштейнов на передних торцах боковых отсеков (1) и (2), а задние (5) винтомоторные пары закреплены при помощи кронштейнов на задних торцах боковых отсеков (1) и (2). Первые (6) центральные и вторые (7) центральные винтомоторные пары установлены при помощи кронштейнов на внешних стенках боковых отсеков (1) и (2) под углом относительно вертикальной оси летательного аппарата. Вторая (7) центральная винтомоторная пара отклонена в противоположную сторону относительно первой (6) центральной винтомоторной пары.
Левый (1) и правый (2) боковые отсеки выполнены зеркальными относительно друг друга.
Для размещения целевой нагрузки между левым (1) и правым (2) боковыми отсеками может располагаться центральный отсек (8). Крылья (3) в данном случае располагаются между центральным отсеком (8) и боковыми отсеками (1) и (2) таким образом, что соединяют боковые отсеки (1) и (2) с центральным отсеком (8).
Заявленный летательный аппарат адаптирован под два режима работы - режим зависания и режим горизонтального полета. Переход из режима зависания в режим горизонтального полета осуществляется наклоном летательного аппарата вперед (отклонением вертикальной оси (12) летательного аппарата от оси Y связанной системы координат) за счет создания винтомоторными парами пикирующего момента таким образом, чтобы профиль крыльев находился на оптимальном угле атаки для осуществления барражирования, полета на максимальную дальность или полета с максимальной скоростью. По мере набора скорости часть винтомоторных пар отключается, либо переводится в режим холостого хода для исключения авторотации. Переход из режима горизонтального полета в режим зависания осуществляется совмещением оси Y связанной системы координат с вертикальной осью (12) летательного аппарата, при котором крылья выходят за критический угол атаки и перестают создавать необходимую для горизонтального полета подъемную силу, а увеличившееся сопротивление способствует снижению скорости летательного аппарата. Все винтомоторные пары при этом включаются в работу и компенсируют отсутствие подъемной силы на крыльях.
Описанные переходные режимы между режимом зависания и режимом горизонтального полета являются неустойчивыми по скорости, т.е. установившийся горизонтальный полет на них не предусмотрен.
Работа задних (5) винтомоторных пар обеспечивает балансировку аппарата. Установка первой центральной (6) и второй центральной (7) винтомоторных пар под углом относительно вертикальной оси ЛА, причем первая центральная (6) винтомоторная пара выполняется с наклоном в противоположную сторону относительно наклона второй центральной (7) винтомоторной пары (фиг.6), позволяет:
- значительно уменьшить энергопотребление на режиме барражирования и при полете на максимальную дальность за счет установки под углом первой центральной (6) винтомоторной пары;
- обеспечить приемлемый уровень управляемости по каналу рысканья, так как в заявленном летательном аппарате ввиду достаточно удаленных от центра масс боковых отсеков момент инерции относительно вертикальной оси значительно выше по сравнению со схемами коптеров, где основные элементы (аккумуляторная батарея, полезная нагрузка и т.д.) расположены в центре аппарата.
Угол установки винтомоторных пар определяется в общем случае по критерию минимизации взлетной массы при заданных (расчетных) профилях полета. Профили полета в свою очередь определяются на этапе проектирования исходя из поставленных перед аппаратом задач.
Для оптимизации режима барражирования используется аэродинамический профиль крыла, реализующий высокие значения аэродинамического качества на больших углах атаки при низких числах Рейнольдса ~0.5*(10^6). Такое решение в совокупности с использованием в качестве маршевых винтов (винты первых центральных винтомоторных пар), обладающих наибольшим КПД на режимах низкой относительной поступи (менее 1), позволяет оптимизировать энергопотребление на режиме горизонтального полета, а также сохранить низкий уровень энергопотребления на режиме зависания. Параметры винтов, обеспечивающие наибольший КПД на указанных значениях относительной поступи, обеспечивают приемлемый уровень энергопотребления и на режиме зависания (подобные винты широко применяются на различных коптерах), что позволяет отказаться от использования винта изменяемого шага.
Площади крыльев подбираются исходя из обеспечения на режиме горизонтального полета такой подъемной силы, при которой некомпенсируемый подъемной силой вес воспринимался бы проекцией тяги первых центральных (6) винтомоторных пар и балансировочных задних (5) винтомоторных пар на ось Y, а проекция на ось X компенсировала бы аэродинамическое сопротивление (фиг.7).
В представленном летательном аппарате часть массы летательного аппарата сосредоточена рядом с винтами, в левом (1) и правом (2) боковых отсеках. Это позволяет уменьшить воздействие изгибающего момента на крылья (3) до 50%, так как сокращается путь передачи подъемной силы по сравнению с классической коптерной схемой.
Увеличение летных характеристик летательного аппарата достигается за счет интегрирования в конструкцию крыльев, а также снижения массы конструкции за счет использования оригинальной компоновочной схемы. Увеличение летных характеристик позволяет увеличить время полета за счет снижения энергопотребления на соответствующем режиме полета. Снижение массы конструкции позволяет улучшить летные характеристики аппарата за счет снижения энергопотребления на всех режимах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвертоплан | 2017 |
|
RU2657706C1 |
| Аэромеханический способ управления конфигурацией и режимом полета конвертируемого летательного аппарата (конвертоплана) | 2017 |
|
RU2700323C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ВОЗДУШНЫМИ ВИНТАМИ НА ПОВОРОТНЫХ ЗАКРЫЛКАХ КРЫЛА | 2021 |
|
RU2757693C1 |
| Летательный аппарат вертикального взлета и посадки с дополнительными грузовыми модулями и выдвигаемыми воздушными винтами | 2021 |
|
RU2759061C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| АЭРОЛЕТ (ВАРИАНТЫ), ЧАСТИ АЭРОЛЕТА, СПОСОБЫ ИСПОЛЬЗОВАНИЯ АЭРОЛЕТА И ЕГО ЧАСТЕЙ | 2010 |
|
RU2466061C2 |
| Винтокрылый беспилотный летательный аппарат тандемной схемы | 2021 |
|
RU2771195C1 |
| КОНВЕРТОПЛАН (ВАРИАНТЫ) | 2010 |
|
RU2446078C2 |
| Винтокрылый летательный аппарат | 2019 |
|
RU2720746C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ СО ВСПОМОГАТЕЛЬНЫМИ ВОЗДУШНЫМИ ВИНТАМИ ДЛЯ УПРАВЛЕНИЯ ПОЛЕТОМ | 2021 |
|
RU2762441C1 |
Изобретение относится к области авиации, а именно к беспилотному летательному аппарату вертикального взлета и посадки. Мультироторный летательный аппарат вертикального взлета и посадки содержит левый и правый боковые отсеки, соединенные внутренними боковыми стенками при помощи крыльев. На левом и правом боковых отсеках симметрично расположены при помощи жестких кронштейнов группы передних, задних, первых центральных и вторых центральных винтомоторных пар, содержащих по меньшей мере один винт и один двигатель. Первые центральные и вторые центральные винтомоторные пары закреплены на внешних боковых сторонах боковых отсеков в противоположных направлениях от вертикальной оси летательного аппарата. Обеспечивается улучшение летных характеристик летательного аппарата, снижение энергопотребления на всех режимах полета. 1 з.п. ф-лы, 7 ил.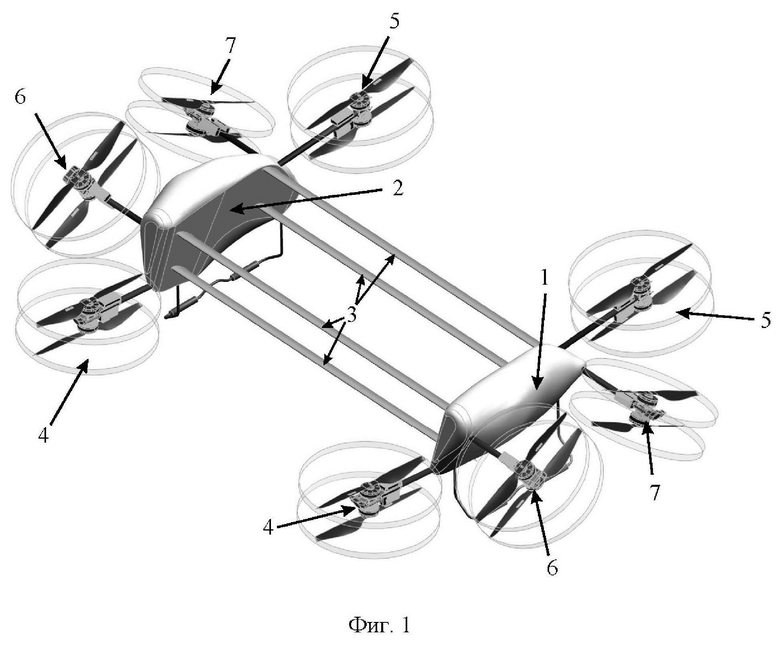
1. Мультироторный летательный аппарат вертикального взлета и посадки, характеризующийся тем, что содержит левый и правый боковые отсеки, соединенные внутренними боковыми стенками при помощи крыльев, причем на левом и правом боковых отсеках симметрично расположены при помощи жестких кронштейнов группы передних, задних, первых центральных и вторых центральных винтомоторных пар, содержащих по меньшей мере один винт и один двигатель, кроме того, первые центральные и вторые центральные винтомоторные пары закреплены на внешних боковых сторонах боковых отсеков в противоположных направлениях от вертикальной оси летательного аппарата.
2. Мультироторный летательный аппарат вертикального взлета и посадки по п. 1, отличающийся тем, что между боковыми отсеками расположен центральный отсек, соединенный с боковыми отсеками крыльями.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ГОРИЗОНТАЛЬНОГО ПОЛЁТА С ВЕРТИКАЛЬНЫМ ВЗЛЁТОМ И ПОСАДКОЙ И НЕСУЩАЯ ПЛАТФОРМА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА ГОРИЗОНТАЛЬНОГО ПОЛЁТА С ВЕРТИКАЛЬНЫМ ВЗЛЁТОМ И ПОСАДКОЙ | 2018 |
|
RU2693362C1 |
| ВЫПОЛНЕННЫЙ С ВОЗМОЖНОСТЬЮ ВЕРТИКАЛЬНОГО ВЗЛЕТА ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2670356C2 |
| US 20220363388 A1, 17.11.2022 | |||
| DE 4443731 A1, 13.06.1996 | |||
| US 11691725 B2, 04.07.2023 | |||
| US 11905008 B2, 20.02.2024. | |||

