Изобретение относится к области радиолокации и может быть использовано при определении параметров движения объектов, обнаруженной малогабаритной радиолокационной станцией.
Известно «Устройство селекции и измерения радиальных скоростей движущихся наземных целей» (Патент РФ №2322682, МПК G01S 13/52, опубл. 20.04.2008 г., Бюл. №11), содержащее антенную систему, три приемных устройства, три процессора, реализующих синтезирование апертур антенной системы, пять вычислителей модуля сигнала, три вычитающих устройства, два вычислителя арктангенса, два сумматора, вычислитель радиальной скорости движущейся наземной цели и систему индикации.
Недостатком указанного устройства является то, что радиальная скорость, определяемая по оценкам положения классифицируемых как движущийся объект (ДО) в соседних периодах, является довольно «грубой» оценкой определения радиальной скорости наземного ДО и использование данной информации является затруднительной для реализации режима автоматического сопровождения объекта на сформированном радиолокационном изображении (РЛИ).
Известно устройство для измерения скорости цели [Бакулев П.А., Степин В.М. Методы и устройства селекции движущихся целей - М.: Радио и связь, 1986, - 34 с.], содержащее последовательно соединенные генератор радиочастоты, детектор, фильтр доплеровских частот и индикатор, второй вход генератора радиочастоты соединен с передающей антенной, второй вход детектора соединен с приемной антенной.
Недостатком указанного устройства является то, что оценка доплеровского смещения частоты определяется лишь с точностью до величины частоты настройки доплеровского фильтра частот.
Наиболее близким по технической сущности к предлагаемому устройству является «Устройство для определения параметров движения наземных объектов в двухпозиционной системе бортовых малогабаритных РЛС» (Патент РФ №2760873 С1, МПК G01S 13/52, опубл. 01.12.2021, Бюл. №34). Данное устройство состоит из первой БРЛС, включающей в себя антенную систему, первый, второй и третий блоки приема, первый, второй и третий процессоры, первый, второй и третий блоки вычитания, первый и второй вычислители арктангенсов, блок определения наклонной дальности, блок вычисления радиальной скорости и блок приема-передачи информации, второй БРЛС, включающей в себя антенную систему, первый, второй и третий блоки приема, первый, второй и третий процессоры, первый, второй и третий блоки вычитания, первый и второй вычислители арктангенсов, блок определения наклонной дальности, блок вычисления радиальной скорости и блок приема-передачи информации, блока управления и обработки информации включающего первый и второй блоки обеспечения приема-передачи, блок формирования полетного задания и управления полетом носителей БРЛС, блок определения расстояния и угла между БРЛС, блок вычисления угловых координат, блок вычисления тангенциальной скорости объекта в системе координат первой БРЛС, блок вычисления тангенциальной скорости объекта в системе координат второй БРЛС, блок вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС, блок вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС, блок вычисления ускорения объекта в системе координат первой БРЛС, блок вычисления ускорения объекта в системе координат второй БРЛС, причем в первой БРЛС первый выход антенной системы последовательно соединен с первым блоком приема и первым процессором, второй выход последовательно соединен со вторым блоком приема и вторым процессором, третий выход последовательно соединен с третьим блоком приема и третьим процессором, первый выход которого соединен со вторым входом второго блока вычитания, первый вход которого соединен с третьим выходом второго процессора, первый выход которого соединен с вторым входом первого блока вычитания, первый вход которого соединен с первым выходом первого процессора, выход первого блока вычитания последовательно соединен с первым вычислителем арктангенсов и третьим блоком вычитания, выход второго блока вычитания последовательно соединен со вторым вычислителем арктангенсов и третьим блоком вычитания, выход которого соединен с блоком вычисления радиальной скорости, а его выход соединен с первым входом блока приема-передачи информации, второй вход которого соединен с выходом блока определения наклонной дальности, первый второй и третий входы которого соединены со вторыми выходами первого, второго и третьего процессоров соответственно. Во второй БРЛС первый выход антенной системы последовательно соединен с первым блоком приема и первым процессором, второй выход последовательно соединен со вторым блоком приема и вторым процессором, третий выход последовательно соединен с третьим блоком приема и третьим процессором, первый выход которого соединен со вторым входом второго блока вычитания, первый вход которого соединен с третьим выходом второго процессора, первый выход которого соединен с вторым входом первого блока вычитания, первый вход которого соединен с первым выходом первого процессора, выход первого блока вычитания последовательно соединен с первым вычислителем арктангенсов и третьим блоком вычитания, выход второго блока вычитания последовательно соединен со вторым вычислителем арктангенсов и третьим блоком вычитания, выход которого соединен с блоком вычисления радиальной скорости, а его выход соединен с первым входом блока приема-передачи информации, второй вход которого соединен с выходом блока определения наклонной дальности, первый второй и третий входы которого соединены со вторыми выходами первого, второго и третьего процессоров соответственно. В блоке управления и обработки информации первый блок обеспечения приема-передачи последовательно соединен с блоком вычисления тангенциальной скорости объекта в системе координат первой БРЛС, блоком вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС и блоком вычисления ускорения объекта в системе координат первой БРЛС, второй блок обеспечения приема-передачи последовательно соединен с блоком вычисления тангенциальной скорости объекта в системе координат второй БРЛС, блоком вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС, и блоком вычисления ускорения объекта в системе координат второй БРЛС, первый выход первого блока обеспечения приема-передачи соединен с первыми входами блока определения расстояния и угла между БРЛС и блока вычисления угловых координат, третий вход которого соединен с выходом блока определения расстояния и угла между БРЛС, первый выход второго блока обеспечения приема-передачи соединен соответственно со вторыми входами блока определения расстояния и угла между БРЛС и блока вычисления угловых координат, первый выход которого соединен со вторыми входами блока вычисления тангенциальной скорости объекта в системе координат первой БРЛС и блока вычисления тангенциальной скорости объекта в системе координат второй БРЛС, третий вход блока вычисления тангенциальной скорости объекта в системе координат первой БРЛС соединен со вторым выходом второго блока обеспечения приема-передачи, третий вход блока вычисления тангенциальной скорости объекта в системе координат второй БРЛС соединен со вторым выходом первого блока обеспечения приема-передачи, первый вход которого соединен соответственно со вторым входом блока вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС и выходом блока вычисления ускорения объекта в системе координат первой БРЛС, первый вход второго блока обеспечения приема передачи соединен соответственно со вторым выходом блока вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС и выходом блока вычисления ускорения объекта в системе координат второй БРЛС второй выход блока вычисления угловых координат соединен с первым входом первого блока обеспечения приема-передачи, а третий выход соединен с первым входом второго блока обеспечения приема-передачи, второй вход которого соединен со вторым выходом блока формирования полетного задания и управления полетом носителей БРЛС, первый выход которого соединен со вторым входом первого блока обеспечения приема передачи, третьи входы первого и второго блоков обеспечения приема передачи соединены по каналу связи соответственно в выходами блоков приема-передачи информации и первой и второй БРЛС.
Данное устройство работает следующим образом. Блок формирования полетного задания посылает управляющий сигнал по шине Ethernet на первый и второй блоки обеспечения приема-передачи, первый блок приема-передачи по каналу связи посылает сигнал на носитель первой БРЛС, а второй блок обеспечения приема-передачи по каналу связи посылает сигнал на носитель второй БРЛС, для того чтобы носители радиолокационной аппаратуры двигались определенным образом. Антенная система первой БРЛС формирует в пространстве три луча на разных частотах излучения зондирующих импульсов, первый, второй и третий блоки приема принимают и усиливают отраженные сигналы (каждый на своей частоте) для возможности работы процессоров, процессоры, блоки вычитания, вычислители арктангенсов и блок вычисления радиальной скорости вычисляют радиальную скорость ДО в соответствии с алгоритмом. Блок определения наклонной дальности, получает сигнал с процессоров и, используя весовую обработку, вычисляет значения наклонной дальности до наземного объекта. Информация с блоков определения наклонной дальности и вычисления радиальной скорости по каналу связи передается на первый блок обеспечения приема-передачи. Вторая БРЛС работает аналогично первой, только передает информацию с блоков определения наклонной дальности и определения радиальной скорости по каналу связи на второй блок обеспечения приема-передачи. С первого и второго блоков обеспечения приема-передачи информация о наклонной дальности поступает на блок определения расстояния и угла между БРЛС где, используя данные из навигационных систем носителей БРЛС вычисляются угол и расстояние. Полученную информацию передают на блок вычисления угловых координат, где в зависимости от расположения носителей вычисляют азимутальные углы. На блоки - блок вычисления тангенциальной скорости объекта в системе координат первой БРЛС и блок вычисления тангенциальной скорости объекта в системе координат второй БРЛС поступают данные о радиальных скоростях Vr1 и Vr2 с первого и второго блоков обеспечения приема-передачи, а также информация о угловых координатах вычисленная в блоке вычисления угловых координат. Полученные значения поступают на блоки вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС и вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС где осуществляется вычисление направления движения подвижного объекта и полный вектор скорости. Значения Vоб поступают на вход блоков вычисления ускорения объекта. Аоб в системе координат первой БРЛС и вычисления ускорения объекта в системе координат второй БРЛС, где в этих блоках вычисляется ускорение наблюдаемого ДО с учетом накопления оценок скорости Vоб на заданном интервале времени Δt в момент измерения ускорения. Вычисленные значения ускорения, скорости - Vоб, и углов αоб, βоб с блоков вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС, вычисления ускорения объекта в системе координат первой БРЛС и вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС, вычисления ускорения объекта в системе координат второй БРЛС поступают на первый и второй блоки обеспечения приема-передачи для последующей передачи по каналу связи на блок приема-передачи информации первой БРЛС и блок приема-передачи информации второй БРЛС соответственно.
Недостатком известного устройства прототипа является то, что радиальная скорость подвижного объекта, определяется на каждой позиции распределенной системы только с точностью до ширины полосы пропускания фильтра из набора доплеровских фильтров.
Задачей изобретения является создание устройства, позволяющего реализовать более узкую ширину полосы пропускания доплеровских фильтров в наборе, при этом не изменяя характеристики отдельных фильтров.
Техническим результатом предлагаемого изобретения является повышение точности измерения радиальной скорости наблюдаемого объекта.
Технический результат достигается тем, что в устройство повышения точности измерения параметров движения обнаруженных объектов в пространственно-распределенной системе малогабаритных РЛС содержащее первую и вторую бортовые радиолокационные станции (БРЛС), каждая из которых выполнена в виде антенной системы, первого, второго и третьего блоков приема, первого, второго и третьего процессоров, блока вычисления радиальной скорости, блока определения наклонной дальности и блока обеспечения приема-передачи данных, причем первый выход антенной системы последовательно соединен с первым блоком приема и первым процессором, второй выход последовательно соединен со вторым блоком приема и вторым процессором, а третий выход последовательно соединен с третьим блоком приема и третьим процессором, выходы первого, второго и третьего процессоров соединены с первым, вторым и третьим входом блока определения наклонной дальности, соответственно выход которого соединен с первым входом блока обеспечения приема-передачи данных, второй вход которого соединен с выходом блока вычисления радиальной скорости, а также блок управления и обработки информации, содержащий последовательно соединенные первый блок обеспечения приема-передачи, блок вычисления тангенциальной скорости объекта в системе координат первой БРЛС, блок вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС, блок вычисления ускорения объекта в системе координат первой БРЛС, последовательно соединенные второй блок обеспечения приема-передачи, блок вычисления тангенциальной скорости объекта в системе координат второй БРЛС, блок вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС, блок вычисления ускорения объекта в системе координат второй БРЛС, первый выход первого блока обеспечения приема-передачи соединен с первыми входами блока определения расстояния и угла между БРЛС и блока вычисления угловых координат, третий вход которого соединен с выходом блока определения расстояния и угла между БРЛС, первый выход второго блока обеспечения приема-передачи соединен со вторыми входами блока определения расстояния и угла между БРЛС и блока вычисления угловых координат, первый выход которого соединен со вторыми входами блоков вычисления тангенциальной скорости объекта в системе координат первой и второй БРЛС, третий вход блока вычисления тангенциальной скорости объекта в системе координат первой БРЛС соединен со вторым выходом второго блока обеспечения приема-передачи, третий вход блока вычисления тангенциальной скорости объекта в системе координат второй БРЛС соединен со вторым выходом первого блока обеспечения приема-передачи, первый вход которого соединен соответственно со вторым выходом блока вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС и выходом блока вычисления ускорения в системе координат первой БРЛС, первый вход второго блока обеспечения приема передачи соединен соответственно со вторым выходом блока вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС и выходом блока вычисления ускорения в системе координат второй БРЛС, второй выход блока вычисления угловых координат соединен с первым входом первого блока обеспечения приема-передачи, а третий выход соединен с первым входом второго блока обеспечения приема-передачи, второй вход которого соединен со вторым выходом блока формирования полетного задания и управления полетом носителей БРЛС, первый выход которого соединен со вторым входом первого блока обеспечения приема-передачи, третьи входы первого и второго блоков обеспечения приема-передачи соединены по беспроводному каналу связи соответственно в выходами блоков приема-передачи данных первой и второй БРЛС, причем, в первую и вторую БРЛС дополнительно введены первый, второй и третий набор доплеровских фильтров, первый, второй и третий амплитудные детекторы и блок повышения точности определения частоты Доплера, причем второй выход первого блока приема соединен с последовательно соединенными первым набором доплеровских фильтров, первым амплитудным детектором и первым входом блока повышения точности определения частоты Доплера, второй выход второго блока приема соединен с последовательно соединенными вторым набором доплеровских фильтров, вторым амплитудным детектором и вторым входом блока повышения точности определения частоты Доплера, а второй выход третьего блока приема последовательно соединенными третьим набором доплеровских фильтров, третьим амплитудным детектором и третьим входом блока повышения точности определения частоты Доплера выход которого соединен с входом блока вычисления радиальной скорости.
Технический результат достигается за счет введения новых существенных признаков, заключающихся в дополнительно введенных наборах доплеровских фильтров, амплитудных детекторов и блоке повышения точности частоты Доплера соединенных особым образом, которые за счет совместной обработки информации позволяют повысить точность определения частоты Доплера путем искусственного сужения полосы пропускания отдельного фильтра в наборе доплеровских фильтров, тем самым повышая точность определения радиальной скорости подвижного объекта.
Сущность изобретения поясняется чертежами, где
на фиг. 1 - схема устройства повышения точности измерения параметров движения обнаруженных объектов в пространственно-распределенной системе малогабаритных РЛС,
На фиг. 2 - вариант геометрии расположения блоков бортовых радиолокационных станций с ведущим носителем первой БРЛС.
На фиг. 3 - вариант геометрии расположения блоков бортовых радиолокационных станций с ведущим носителем второй БРЛС,
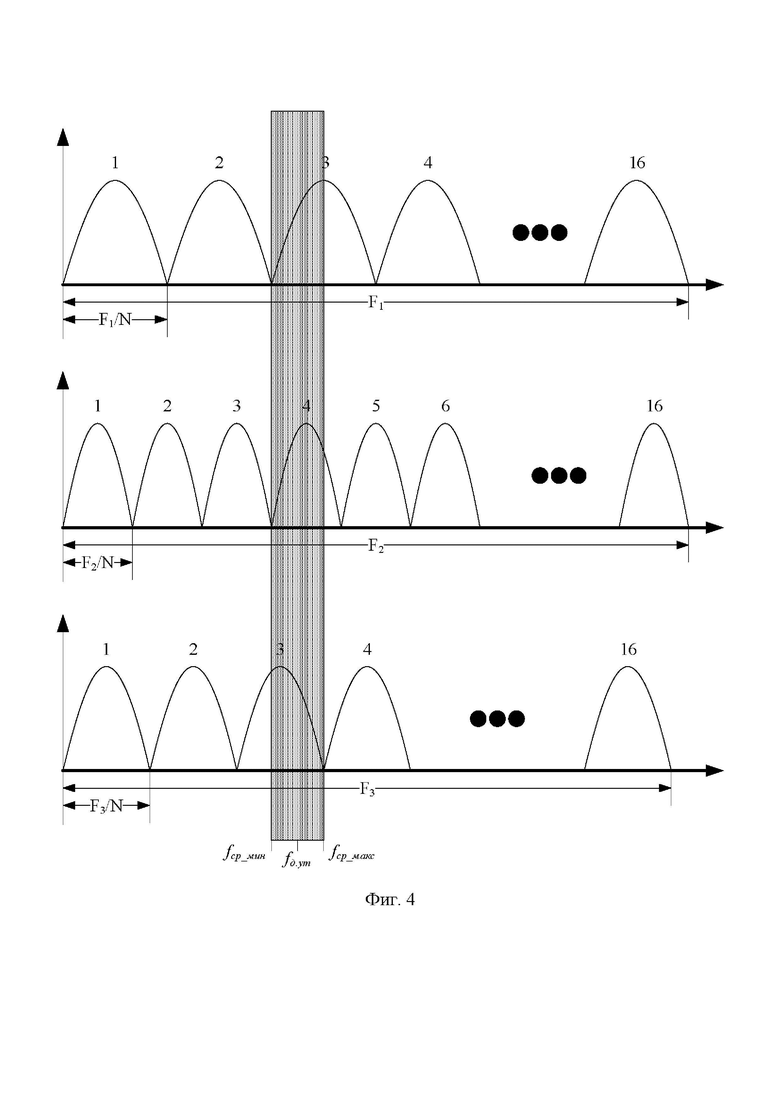
на фиг. 4 - иллюстрация процесса искусственного сужения полосы пропускания фильтра, и введены следующие обозначения:
1 - Первая бортовая радиолокационная станция (БРЛС)
1.1 - Антенная система
1.2 - Первый блок приема
1.3 - Второй блок приема
1.4 - Третий блок приема
1.5 - Первый набор доплеровских фильтров
1.6 - Второй набор доплеровских фильтров
1.7 - Третий набор доплеровских фильтров
1.8 - Первый амплитудный детектор
1.9 - Второй амплитудный детектор
1.10 - Третий амплитудный детектор
1.11 - Блок повышения точности определения частоты Доплера
1.12 - Блок вычисления радиальной скорости
1.13 - Первый процессор
1.14 - Второй процессор
1.15 - Третий процессор
1.16 - Блок определения наклонной дальности
1.17 - Блок приема-передачи информации.
2 - Вторая бортовая радиолокационная станция (БРЛС)
2.1 - Антенная система
2.2 - Первый блок приема
2.3 - Второй блок приема
2.4 - Третий блок приема
2.5 - Первый набор доплеровских фильтров
2.6 - Второй набор доплеровских фильтров
2.7 - Третий набор доплеровских фильтров
2.8 - Первый амплитудный детектор
2.9 - Второй амплитудный детектор
2.10 - Третий амплитудный детектор
2.11 - Блок повышения точности определения частоты Доплера
2.12 - Блок вычисления радиальной скорости
2.13 - Первый процессор
2.14 - Второй процессор
2.15 - Третий процессор
2.16 - Блок определения наклонной дальности
2.17 - Блок приема-передачи информации.
3 - Блок управления и обработки информации
3.1 - Первый блок обеспечения приема-передачи
3.2 - Второй блок обеспечения приема-передачи
3.3 - Блок формирования полетного задания и управления полетом носителей БРЛС
3.4 - Блок определения расстояния и угла между БРЛС
3.5 - Блок вычисления угловых координат
3.6 - Блок вычисления тангенциальной скорости объекта в системе координат первой БРЛС
3.7 - Блок вычисления тангенциальной скорости объекта в системе координат второй БРЛС
3.8 - Блок вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС
3.9 - Блок вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС
3.10 - Блок вычисления ускорения объекта в системе координат первой БРЛС
3.11 - Блок вычисления ускорения объекта в системе координат второй БРЛС
Устройство состоит из первой БРЛС 1, включающей в себя антенную систему 1.1, первый 1.2, второй 1.3 и третий 1.4 блоки приема, первый 1.5, второй 1.6 и третий 1.7 набор доплеровских фильтров, первый 1.8, второй 1.9 и третий 1.10 амплитудные детекторы, блок повышения точности определения частоты Доплера 1.11, блок вычисления радиальной скорости 1.12, первый 1.13, второй 1.14 и третий 1.15 процессоры, блок определения наклонной дальности 1.16 и блок приема-передачи информации 1.17, второй БРЛС 2, включающей в себя антенную систему 2.1, первый 2.2, второй 2.3 и третий 2.4 блоки приема, первый 2.5, второй 2.6 и третий 2.7 набор доплеровских фильтров, первый 2.8, второй 2.9 и третий 2.10 амплитудные детекторы, блок повышения точности определения частоты Доплера 2.11, блок вычисления радиальной скорости 2.12, первый 2.13, второй 2.14 и третий 2.15 процессоры, блок определения наклонной дальности 2.16 и блок приема-передачи информации 2.17 и блока управления и обработки информации 3 включающего первый 3.1 и второй 3.2 блоки обеспечения приема-передачи, блок формирования полетного задания и управления полетом носителей БРЛС 3.3, блок определения расстояния и угла между БРЛС 3.4, блок вычисления угловых координат 3.5, блок вычисления тангенциальной скорости объекта в системе координат первой БРЛС 3.6, блок вычисления тангенциальной скорости объекта в системе координат второй БРЛС 3.7, блок вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС 3.8, блок вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС 3.9, блок вычисления ускорения объекта в системе координат первой БРЛС 3.10, блок вычисления ускорения объекта в системе координат второй БРЛС 3.11, причем в первой 1 БРЛС первый, второй и третий выходы антенной системы 1.1 соединены со входами первого 1.2, второго 1.3 и третьего 1.4 блоков приема первые выходы которых соединены соответственно со входами первого 1.13, второго 1.14 и третьего 1.15 процессоров выходы которых соединены соответственно с первым, вторым и третьим входами блока определения наклонной дальности 1.16 выход которого соединен с первым входом блока приема передачи информации 1.17. Вторые выходы первого 1.2, второго 1.3 и третьего 1.4 блоков приема соединены соответственно со входами первого 1.5, второго 1.6 и третьего 1.7 набора доплеровских фильтров, выходы которых соединены соответственно со входами первого 1.8, второго 1.9 и третьего 1.10 амплитудного детекторов, выходы которых соединены соответственно с первым, вторым и третьим входами блока повышения точности определения частоты Доплера 1.11 выход которого соединен с блоком вычисления радиальной скорости 1.12, выход которого соединен со вторым входом блока приема-передачи информации 1.17. Во второй 2 БРЛС первый, второй и третий выходы антенной системы 2.1 соединены со входами первого 2.2, второго 2.3 и третьего 2.4 блоков приема первые выходы которых соединены соответственно со входами первого 2.13, второго 2.14 и третьего 2.15 процессоров выходы которых соединены соответственно с первым, вторым и третьим входами блока определения наклонной дальности 2.16 выход которого соединен с первым входом блока приема передачи информации 2.17. Вторые выходы первого 2.2, второго 2.3 и третьего 2.4 блоков приема соединены соответственно со входами первого 2.5, второго 2.6 и третьего 2.7 набора доплеровских фильтров, выходы которых соединены соответственно со входами первого 2.8, второго 2.9 и третьего 2.10 амплитудного детекторов, выходы которых соединены соответственно с первым, вторым и третьим входами блока повышения точности определения частоты Доплера 2.11 выход которого соединен с блоком вычисления радиальной скорости 2.12, выход которого соединен со вторым входом блока приема-передачи информации 2.17. В блоке управления и обработки информации 3 первый блок обеспечения приема-передачи 3.1 последовательно соединен с блоком вычисления тангенциальной скорости объекта в системе координат первой БРЛС 3.6, блоком вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС 3.8 и блоком вычисления ускорения объекта в системе координат первой БРЛС 3.10, второй блок обеспечения приема-передачи 3.2 последовательно соединен с блоком вычисления тангенциальной скорости объекта в системе координат второй БРЛС 3.7, блоком вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС 3.9, и блоком вычисления ускорения объекта в системе координат второй БРЛС 3.11, первый выход первого блока обеспечения приема-передачи 3.1 соединен с первыми входами блока определения расстояния и угла между БРЛС 3.4 и блока вычисления угловых координат 3.5, третий вход которого соединен с выходом блока определения расстояния и угла между БРЛС 3.4, первый выход второго блока обеспечения приема-передачи 3.2 соединен соответственно со вторыми входами блока определения расстояния и угла между БРЛС 3.4 и блока вычисления угловых координат 3.5, первый выход которого соединен со вторыми входами блока вычисления тангенциальной скорости объекта в системе координат первой БРЛС 3.6 и блока вычисления тангенциальной скорости объекта в системе координат второй БРЛС 3.7, третий вход блока вычисления тангенциальной скорости объекта в системе координат первой БРЛС 3.6 соединен со вторым выходом второго блока обеспечения приема-передачи, 3.2 третий вход блока вычисления тангенциальной скорости объекта в системе координат второй БРЛС 3.7 соединен со вторым выходом первого блока обеспечения приема-передачи 3.1, первый вход которого соединен соответственно со вторым входом блока вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС 3.8 и выходом блока вычисления ускорения объекта в системе координат первой БРЛС 3.10, первый вход второго блока обеспечения приема передачи 3.2 соединен соответственно со вторым выходом блока вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС 3.9 и выходом блока вычисления ускорения объекта в системе координат второй БРЛС 3.11 второй выход блока вычисления угловых координат 3.5 соединен с первым входом первого блока обеспечения приема-передачи 3.1, а третий выход соединен с первым входом второго блока обеспечения приема-передачи 3.2, второй вход которого соединен со вторым выходом блока формирования полетного задания и управления полетом носителей БРЛС 3.3, первый выход которого соединен со вторым входом первого блока обеспечения приема передачи 3.1, третьи входы первого 3.1 и второго 3.2 блоков обеспечения приема передачи соединены по каналу связи соответственно в выходами блоков приема-передачи информации 1.17 и 2.17 первой 1 и второй 2 БРЛС.
Первая и вторая БРЛС выполнены в виде:
- Антенной системы 1.1 и 2.1 выполненной в виде двухлучевой антенны с фазированной антенной решеткой, подобные антенны описаны в [1].
- Блоков приема 1.2, 1.3, 1.4, 2.2, 2.3, 2.4, описанных в [2].
- Процессоры 1.13, 1.14, 1.15, 2.13, 2.14, 2.15, описанных в [3].
- Наборы доплеровских фильтров 1.5, 2.5,1.6, 2.6, 1.7, 2.7 амплитудные детекторы 1.8, 2.8, 1.9, 2.9, 1.10, 2.10, блоки повышения точности определения частоты Доплера 1.11, 2.11, а также блоки вычисления радиальной скорости 1.12, 2.12 и блоки определения наклонной дальности 1.16, 2.16 выполнены в виде программируемой логической интегральной схемы (ПЛИС).
- Блоки приема-передачи информации 1.17 и 2.17 выполнены в виде постоянного запоминающего устройства (ПЗУ), соединенного с одноплатным компьютером по шине PCI Express 3.0, и дуплексной системы передачи информации, выполненной по технологии wi-fi.
Заявляемое устройство работает следующим образом.
Блок формирования полетного задания и управления полетом носителей БРЛС 3.3 посылает управляющий сигнал по шине Ethernet на первый 3.1 и второй 3.2 блоки обеспечения приема-передачи, первый блок приема-передачи 3.1 по каналу связи посылает сигнал на носитель первой БРЛС 1, а второй блок обеспечения приема-передачи 3.2 по каналу связи посылает сигнал на носитель второй БРЛС 2, для того чтобы носители радиолокационной аппаратуры двигались одним из указанных на фиг. 2 и фиг. 3 образом. Антенная система 1.1 первой БРЛС 1 излучает в пространство три импульсных зондирующих сигнала (с высокой частотой повторения) с разными частотами следования импульсов, первый 1.2, второй 1.3 и третий 1.4 блоки приема осуществляют прием переотраженных сигналов, усиливают и оцифровывают их (каждый на своей частоте повторения). С блока (1.2) принятый и усиленный сигнал поступает на блоки (1.5) и (1.8), при этом набор фильтров (1.5) настроен на частоту следования импульсов F1 (см. фиг. 4) с полосой пропускания отдельного фильтра в данном наборе - F1/N, где по известному алгоритму [4] определяется номер доплеровского фильтра из первого набора доплеровских фильтров (1.5), этот номер фильтра передается на блок повышения точности определения частоты Доплера (1.11), параллельно аналогичные операции выполняются в блоках (1.6), (1.9) и (1.7), (1.10) соответственно, при этом второй набор доплеровских фильтров настроен на частоту следования импульсов F2, а третий набор - настроен на частоту следования импульсов F3 (см. фиг. 4). В блоке повышения точности определения частоты Доплера (1.11) происходит следующее, по определенным раннее номерам доплеровских фильтров, в которых сработал амплитудный детектор [4], а также по известной ширине полосы пропускания в отдельном доплеровском фильтре каждого набора определяется область пересечения полос пропускания между тремя наборами фильтров (см. фиг 4. - заштрихованная область) в которых произошло обнаружение сигнала, и в данной суженной области пересечения уточненная величина доплеровского смещения частоты определяется как медианное значение fд.ут между минимальным fср_мин и максимальным fср_макс значениями области пересечения частот между соответствующими номерами фильтров 3-х сформированных наборов. Полученное уточненное значение доплеровского смещения частоты передается в блок вычисления радиальной скорости (1.12), где по известной формуле определяется соответствующая скорость объекта.
Параллельно с определением радиальной скорости усиленные отраженные сигналы с первого 1.2, второго 1.3 и третьего 1.4 блоков приема поступают в процессоры 1.13-1.15 где обрабатываются и поступают на блок определения наклонной дальности 1.16, где, используя весовую обработку, вычисляется значения наклонной дальности до наземного объекта. Информация с блоков определения наклонной дальности 1.16 и вычисления радиальной скорости 1.12 по каналу связи передается на первый блок обеспечения приема-передачи 3.1. Вторая БРЛС 2 работает аналогично первой, только передает информацию с блоков определения наклонной дальности 2.16 и определения радиальной скорости 2.12 по каналу связи на второй блок обеспечения приема-передачи 3.2. С первого 3.1 и второго 3.2 блоков обеспечения приема-передачи информация о наклонной дальности поступает на блок определения расстояния и угла между БРЛС 3.4 где, используя данные из навигационных систем носителей БРЛС вычисляются угол Δ и расстояние d (см. фиг.2 и фиг. 3). Полученную информацию передают на блок вычисления угловых координат 3.5, где в зависимости от расположения носителей вычисляют азимутальные углы для фиг.2:


для фиг. 3:


На блоки - блок вычисления тангенциальной скорости объекта в системе координат первой БРЛС 3.6 и блок вычисления тангенциальной скорости объекта в системе координат второй БРЛС 3.7 поступают данные о радиальных скоростях  и
и  с первого 3.1 и второго 3.2 блоков обеспечения приема-передачи, а также информация о угловых координатах вычисленная в блоке вычисления угловых координат 3.5. Вычисление тангенциальной составляющей скорости подвижного объекта поясняется на фиг. 2, фиг. 3 и осуществляется по формулам:
с первого 3.1 и второго 3.2 блоков обеспечения приема-передачи, а также информация о угловых координатах вычисленная в блоке вычисления угловых координат 3.5. Вычисление тангенциальной составляющей скорости подвижного объекта поясняется на фиг. 2, фиг. 3 и осуществляется по формулам:

где  .
.
Полученные значения поступают на блоки вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС 3.8 и вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС 3.9 где осуществляется вычисление направления движения подвижного объекта:

а полный вектор скорости легко вычисляется по известной формуле:

Значения  поступают на вход блоков вычисления ускорения объекта Aоб в системе координат первой БРЛС 3.10 и вычисления ускорения объекта в системе координат второй БРЛС 3.11, где в этих блоках вычисляется ускорение наблюдаемого ДО с учетом накопления оценок скорости на заданном интервале времени Δt в момент измерения ускорения, и в соответствии с следующим выражением вычисляется как:
поступают на вход блоков вычисления ускорения объекта Aоб в системе координат первой БРЛС 3.10 и вычисления ускорения объекта в системе координат второй БРЛС 3.11, где в этих блоках вычисляется ускорение наблюдаемого ДО с учетом накопления оценок скорости на заданном интервале времени Δt в момент измерения ускорения, и в соответствии с следующим выражением вычисляется как:
где  и
и  - оценки скорости на заданном интервале времени, в котором проводится оценка ускорения;
- оценки скорости на заданном интервале времени, в котором проводится оценка ускорения;
Вычисленные значения ускорения, скорости - , и углов  ,
,  с блоков вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС 3.8, вычисления ускорения объекта в системе координат первой БРЛС 3.10 и вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС 3.9, вычисления ускорения объекта в системе координат второй БРЛС 3.11 поступают на первый 3.1 и второй 3.2 блоки обеспечения приема-передачи для последующей передачи по каналу связи на блок отображения и передачи информации 1.15 и блок отображения и передачи информации 2.15 соответственно.
с блоков вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС 3.8, вычисления ускорения объекта в системе координат первой БРЛС 3.10 и вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС 3.9, вычисления ускорения объекта в системе координат второй БРЛС 3.11 поступают на первый 3.1 и второй 3.2 блоки обеспечения приема-передачи для последующей передачи по каналу связи на блок отображения и передачи информации 1.15 и блок отображения и передачи информации 2.15 соответственно.
На основании вышеизложенного следует, что заявляемое изобретение по сравнению с прототипом позволяет повысить точность определения радиальной составляющей вектора скорости подвижного объекта, и за счет этого дополнительным результатом является повышение точности определения полного вектора скорости (абсолютное значение) и направления движения, а также как следствие ускорения движущегося объекта.
Предлагаемое устройство целесообразно использовать на борту воздушных летательных аппаратов, как вертолетного, так и самолетного типа.
Использованные источники информации:
1. А.В. Шишлов, Б.А. Левитан, С.А. Топчиев, В.Р. Анпилогов, В.В. Денисенко. Многолучевые антенны для систем радиолокации и связи. Журнал радиоэлектроники [электронный журнал]. 2018. № 7. Режим доступа: http://jre.cplire.ru/jre/jul18/6/text.pdf DOI 10.30898/1684-1719.2018.7.6 (дата обращения: 1.02.2021).
2. Справочник по радиолокации / Под ред. М.И. Сколника. Пер. с англ. Под общей ред. В.С. Вербы. В 2 книгах. Книга 1 М.: Техносфера, 2015 на стр. 282-285.
3. Радиолокационные станции с цифровым синтезированием апертуры антенны / Под ред. В.Т. Горяинова. - М.: Радио и связь, 1988 на стр. 210-219.
4. Радиолокация для всех / Под ред. В.С. Вербы. - М.: Техносфера, 2020 на стр. 399.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров движения наземных объектов в двухпозиционной системе бортовых малогабаритных РЛС | 2021 |
|
RU2760873C1 |
| Способ локации целей в передних зонах обзора бортовых радиолокационных станций двухпозиционной радиолокационной системы | 2019 |
|
RU2703996C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| Способ определения угла сноса летательного аппарата бортовой радиолокационной станцией | 2017 |
|
RU2660159C1 |
| Способ определения скорости и направления движения наземных объектов бортовой радиолокационной станцией с антенной решеткой | 2021 |
|
RU2786678C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| Способ обнаружения вертолетов бортовой радиолокационной станцией | 2018 |
|
RU2691387C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489753C2 |



Изобретение относится к области радиолокации и может быть использовано при определении параметров движения объектов, обнаруженных малогабаритной радиолокационной станцией. Техническим результатом изобретения является повышение точности измерения радиальной скорости наблюдаемого объекта. В заявленное устройство дополнительно введены набор доплеровских фильтров, амплитудных детекторов и блок повышения точности частоты Доплера с соответствующими соединениями, которые за счет совместной обработки информации позволяют повысить точность определения частоты Доплера путем искусственного сужения полосы пропускания отдельного фильтра в наборе доплеровских фильтров, тем самым повышая точность определения радиальной скорости подвижного объекта. 4 ил.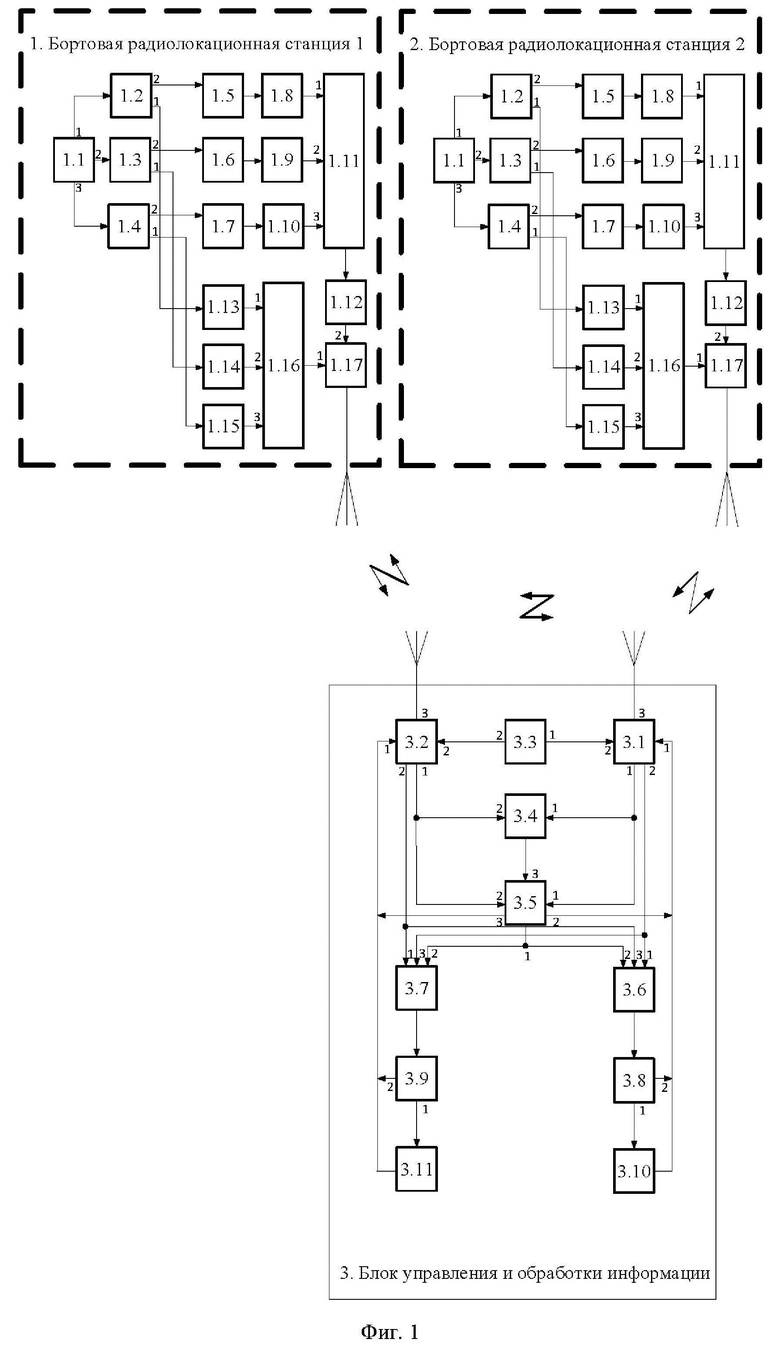
Устройство повышения точности измерения параметров движения обнаруженных объектов в пространственно-распределенной системе малогабаритных РЛС, содержащее первую и вторую бортовые радиолокационные станции (БРЛС), каждая из которых выполнена в виде антенной системы, первого, второго и третьего блоков приема, первого, второго и третьего процессоров, блока вычисления радиальной скорости, блока определения наклонной дальности и блока обеспечения приема-передачи данных, причем первый выход антенной системы последовательно соединен с первым блоком приема и первым процессором, второй выход последовательно соединен со вторым блоком приема и вторым процессором, а третий выход последовательно соединен с третьим блоком приема и третьим процессором, выходы первого, второго и третьего процессоров соединены с первым, вторым и третьим входами блока определения наклонной дальности, соответственно выход которого соединен с первым входом блока обеспечения приема-передачи данных, второй вход которого соединен с выходом блока вычисления радиальной скорости, а также блок управления и обработки информации, содержащий последовательно соединенные первый блок обеспечения приема-передачи, блок вычисления тангенциальной скорости объекта в системе координат первой БРЛС, блок вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС, блок вычисления ускорения объекта в системе координат первой БРЛС, последовательно соединенные второй блок обеспечения приема-передачи, блок вычисления тангенциальной скорости объекта в системе координат второй БРЛС, блок вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС, блок вычисления ускорения объекта в системе координат второй БРЛС, первый выход первого блока обеспечения приема-передачи соединен с первыми входами блока определения расстояния и угла между БРЛС и блока вычисления угловых координат, третий вход которого соединен с выходом блока определения расстояния и угла между БРЛС, первый выход второго блока обеспечения приема-передачи соединен со вторыми входами блока определения расстояния и угла между БРЛС и блока вычисления угловых координат, первый выход которого соединен со вторыми входами блоков вычисления тангенциальной скорости объекта в системе координат первой и второй БРЛС, третий вход блока вычисления тангенциальной скорости объекта в системе координат первой БРЛС соединен со вторым выходом второго блока обеспечения приема-передачи, третий вход блока вычисления тангенциальной скорости объекта в системе координат второй БРЛС соединен со вторым выходом первого блока обеспечения приема-передачи, первый вход которого соединен соответственно со вторым выходом блока вычисления полного вектора скорости и направления движения объекта в системе координат первой БРЛС и выходом блока вычисления ускорения в системе координат первой БРЛС, первый вход второго блока обеспечения приема передачи соединен соответственно со вторым выходом блока вычисления полного вектора скорости и направления движения объекта в системе координат второй БРЛС и выходом блока вычисления ускорения в системе координат второй БРЛС, второй выход блока вычисления угловых координат соединен с первым входом первого блока обеспечения приема-передачи, а третий выход соединен с первым входом второго блока обеспечения приема-передачи, второй вход которого соединен со вторым выходом блока формирования полетного задания и управления полетом носителей БРЛС, первый выход которого соединен со вторым входом первого блока обеспечения приема-передачи, третьи входы первого и второго блоков обеспечения приема-передачи соединены по беспроводному каналу связи соответственно в выходами блоков приема-передачи данных первой и второй БРЛС, отличающееся тем, что в первую и вторую БРЛС дополнительно введены первый, второй и третий набор доплеровских фильтров, первый, второй и третий амплитудные детекторы и блок повышения точности определения частоты Доплера, причем второй выход первого блока приема соединен с последовательно соединенными первым набором доплеровских фильтров, первым амплитудным детектором и первым входом блока повышения точности определения частоты Доплера, второй выход второго блока приема соединен с последовательно соединенными вторым набором доплеровских фильтров, вторым амплитудным детектором и вторым входом блока повышения точности определения частоты Доплера, а второй выход третьего блока приема последовательно соединенными третьим набором доплеровских фильтров, третьим амплитудным детектором и третьим входом блока повышения точности определения частоты Доплера, выход которого соединен с входом блока вычисления радиальной скорости.
| Устройство для определения параметров движения наземных объектов в двухпозиционной системе бортовых малогабаритных РЛС | 2021 |
|
RU2760873C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ И ИЗМЕРЕНИЯ РАДИАЛЬНЫХ СКОРОСТЕЙ ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ | 2006 |
|
RU2322682C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| Устройство для приготовления и заливки люминофорной суспензии | 1960 |
|
SU141506A1 |
| ШИШЛОВ А.В., ЛЕВИТАН Б.А., ТОПЧИЕВ С.А., АНПИЛОГОВ В.Р., ДЕНИСЕНКО В.В | |||
| Многолучевые антенны для систем радиолокации и связи // Журнал радиоэлектроники | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| US 6982668 B1, 03.01.2006 | |||
| 0 |
|
SU93603A1 | |
| CN 108020836 | |||
