Изобретение относится к технологии электрополирования деталей из металлов и сплавов и может быть использовано для обработки поверхностей лопаток турбомашин для повышения их эксплуатационных характеристик.
С повышением шероховатости поверхности ответственных металлических деталей, работающих в условиях воздействия значительных знакопеременных нагрузок, например валов, лопаток газовых турбин и т.п., резко снижаются их эксплуатационные характеристики. Качество обработки поверхности пера лопаток существенно влияет на их прочностные характеристики, так например, повышение класса чистоты поверхности способствует увеличению предела выносливости и статической прочности лопаток (В.Ф. Макаров, Е.Н. Бычина, А.О. Чуян. Математическое моделирование процесса полирования лопаток газотурбинных двигателей // Авиационно-космическая техника и технология. №8 (85), 2011, с.11-14). Развитая шероховатость поверхности лопаток газовых турбин приводит к ухудшению газодинамической устойчивости газотурбинного двигателя (ГТД), к возрастанию аэродинамических потерь, приводящих к снижению КПД, к потере мощности, росту удельных расходов и к снижению экономичности двигателя или газотурбинной установки.
В то же время производство и ремонт деталей газотурбинных двигателей (ГТД) и установок (ГТУ), в связи с высокими требованиями к качеству поверхности (Ra≤0,32…0,16 мкм), характеризуется значительной трудоемкостью их финишной обработки. Это вызывает проблемы при механической обработке поверхностей деталей турбомашин. В этой связи развитие способов получения высококачественных поверхностей деталей турбомашин является весьма актуальной задачей.
Известен способ полирования поверхности детали кругом, при котором детали сообщают возвратно-поступательное перемещение относительно инструмента (А.С. СССР №1732604. МПК B24B 19/14. Способ полирования пера лопаток ГТД лепестковым кругом. Опубл. Бюл. № 1, 2014 г.), в котором полирование производят с деформацией лепесткового круга.
Однако применение в известных способах полирования поверхности детали механического воздействия вызывает ухудшение параметров качества поверхностного слоя материалов, что приводит к снижению ее эксплуатационных характеристик, особенно в случаях обработки таких деталей как лопатки турбины с тонким пером.
Наиболее перспективными методами обработки деталей сложной формы, в частности лопаток турбомашин являются электрохимические методы полирования поверхностей [Грилихес С.Я. Электрохимическое и химическое полирование: Теория и практика. Влияние на свойства металлов. Л., Машиностроение, 1987], при этом наибольший интерес для рассматриваемой области представляют методы электролитно-плазменного полирования (ЭПП) деталей [например, Патент ГДР (DD) №238074 (А1), МПК C25F 3/16, опубл. 06.08.1986].
Известен также способ полирования металлических поверхностей, включающий анодную обработку в электролите [Патент РБ №1132, МПК C25F 3/16, опубл. 1996, БИ №3], а также способ электрохимического полирования [Патент США №5028304, МПК B23H 3/08, C25F 3/16, C25F 5/00, опубл. 02.07.1991].
Однако известные способы электрополирования не позволяют производить однородную обработку поверхности детали из металлического сплава, особенно деталей сложной формы.
Наиболее близким техническим решением, выбранным в качестве прототипа является закрепление детали на держателе изделия, закрепленном на валу установки, погружение детали в рабочую емкость с гранулами-анионитами, обеспечивающими ионный унос металла с поверхности детали с удалением микровыступов при подаче противоположного по знаку электрического потенциала на упомянутую деталь и упомянутые гранулы-аниониты через контактирующий с упомянутыми гранулами-анионитами внешний электрод [ WO2017186992 - |Method for smoothing and polishing metals via ion transport by means of free solid bodies, and solid bodies for carrying out said method. Опубл. 2017.11.02].
Однако известный способ-прототип [WO2017186992] обладает низкой надежностью и не может быть использован для обработки поверхности ответственных деталей, таких как лопатки турбомашин, поскольку происходит хаотичное взаимодействие поверхности с гранулами, что приводит к неоднородной обработки поверхности, приводящих к снижению эксплуатационных характеристик обработанных деталей.
Задачей, на решение которой направлено заявляемое изобретение, является повышение качества и надежности обработки металлических деталей, особенно ответственных деталей сложной формы, таких как лопатки турбомашин, а также возможность заданного радиуса скругления входных и выходных кромок пера лопатки.
Техническим результатом изобретения является повышение качества и надежности обработки поверхности металлической детали за счет повышения однородности обработки ее поверхности, снижения вероятности появления дефектов.
Технический результат достигается за счет того, что в электрополирования металлической детали сложной формы, включающем закрепление детали на держателе изделия, закрепленном на валу установки, погружение детали в рабочую емкость с гранулами-анионитами, обеспечивающими ионный унос металла с поверхности детали с удалением микровыступов при подаче противоположного по знаку электрического потенциала на упомянутую деталь и упомянутые гранулы-аниониты через контактирующий с упомянутыми гранулами-анионитами внешний электрод, в отличие от прототипа используют держатель изделия, выполненный с возможностью перемещения детали по меньшей мере по трем осям координат, перемещают деталь одновременно по трем осям координат, обеспечивая равномерное омывание упомянутыми гранулами-анионитами обрабатываемой поверхности упомянутой детали при обеспечении контакта всей полируемой поверхности детали с упомянутыми гранулами-анионитами и гранул-анионитов между собой и с упомянутым внешним электродом.
Кроме того возможны следующие, дополнительные приемы выполнения способа: в качестве упомянутого держателя изделий используют механизм с параллельной кинематикой; при перемещении детали по трем осям координат подвергают ее вибрации и производят вращение упомянутой детали вокруг оси упомянутого вала установки при одновременном изменении угла наклона упомянутой детали относительно нейтрального положения оси упомянутого вала; при перемещении детали по трем осям координат производят ее вращение вокруг оси упомянутого вала установки; при перемещении детали по трем осям координат производят ее вращение вокруг оси упомянутого вала установки при одновременном изменении угла наклона упомянутой детали относительно оси упомянутого вала; используют внешний электрод, охватывающий с зазором упомянутую обрабатываемую деталь, которую подвергают вибрации с частотой от 15 до 50 Гц и амплитудой от 0,5 до 10 мм.
Наиболее близким техническим решением, выбранным в качестве прототипа установки для электрополирования металлической детали, является установка, содержащая источники электрического питания для электрополирования и осуществления рабочих движений механизмов установки, блок управления, рабочую емкость с гранулами-анионитами и внешним электродом, обеспечивающим электрический контакт с упомянутыми гранулами-анионитами, и по крайней мере один закрепленный на выполненном с возможностью вращения валу установки держатель изделия, выполненный с возможностью размещения и перемещения детали в среде упомянутых гранул-анионитов с обеспечением подачи противоположных по знаку электрических потенциалов для электрополирования на внешний электрод и обрабатываемую деталь, устройство для обеспечения вибрации упомянутых гранул-анионитов [ WO2017186992 - |Method for smoothing and polishing metals via ion transport by means of free solid bodies, and solid bodies for carrying out said method. Опубл. 2017.11.02].
Однако известная установка для полирования [WO2017186992] обладает низкой надежностью и не может быть использован для обработки поверхности ответственных деталей, таких как лопатки турбомашин, поскольку происходит хаотичное взаимодействие поверхности с гранулами, что приводит к неоднородной обработки поверхности, приводящих к снижению эксплуатационных характеристик обработанных деталей.
Техническим результатом изобретения является повышение качества и надежности обработки поверхности металлической детали за счет повышения однородности обработки ее поверхности, снижения вероятности появления дефектов.
Технический результат достигается за счет того, что установка для электрополирования металлической детали, содержащая источники электрического питания для электрополирования и осуществления рабочих движений механизмов установки, блок управления, рабочую емкость с гранулами-анионитами и внешним электродом, обеспечивающим электрический контакт с упомянутыми гранулами-анионитами, и по крайней мере один закрепленный на выполненном с возможностью вращения валу установки держатель изделия, выполненный с возможностью размещения и перемещения детали в среде упомянутых гранул-анионитов с обеспечением подачи противоположных по знаку электрических потенциалов для электрополирования на внешний электрод и обрабатываемую деталь, устройство для обеспечения вибрации упомянутых гранул-анионитов в отличие от прототипа упомянутый держатель изделия выполнен с возможностью перемещения детали, по меньшей мере, по трем осям координат при вращении упомянутого вала установки, выполненного с возможностью изменения угла наклона относительно своего нейтрального положения.
Кроме того возможны следующие признаки установки: в качестве упомянутого держателя изделий используют механизм с параллельной кинематикой; качестве упомянутого механизма с параллельной кинематикой используют механизм, содержащий основание, три стойки, салазки, смонтированные с возможностью перемещения по вертикальным направляющим стоек, установленный в корпусе зажим, три пары штанг, размещенных в каждой паре параллельно между собой и соединяющих корпус и салазки посредством шарниров, стол для установки обрабатываемой детали; упомянутый механизм с параллельной кинематикой снабжен дополнительной парой штанг, расположенных параллельно между собой, и пластинами, установленными по периметру между стойками на уровне их вертикальных направляющих, при этом каждая из пар штанг расположена в соответствующей вертикальной плоскости, одни из концов штанг дополнительной пары соединены общими шарнирами с соответствующими концами штанг одной из пар и с салазками, а другие концы штанг дополнительной пары соединены с корпусом посредством шарниров, расположенных относительно оси корпуса попарно симметрично размещенным на корпусе шарнирам штанг упомянутой пары, причем вертикальные плоскости, в которых размещены штанги дополнительной пары и штанги упомянутой пары, расположены под острым углом друг к другу.
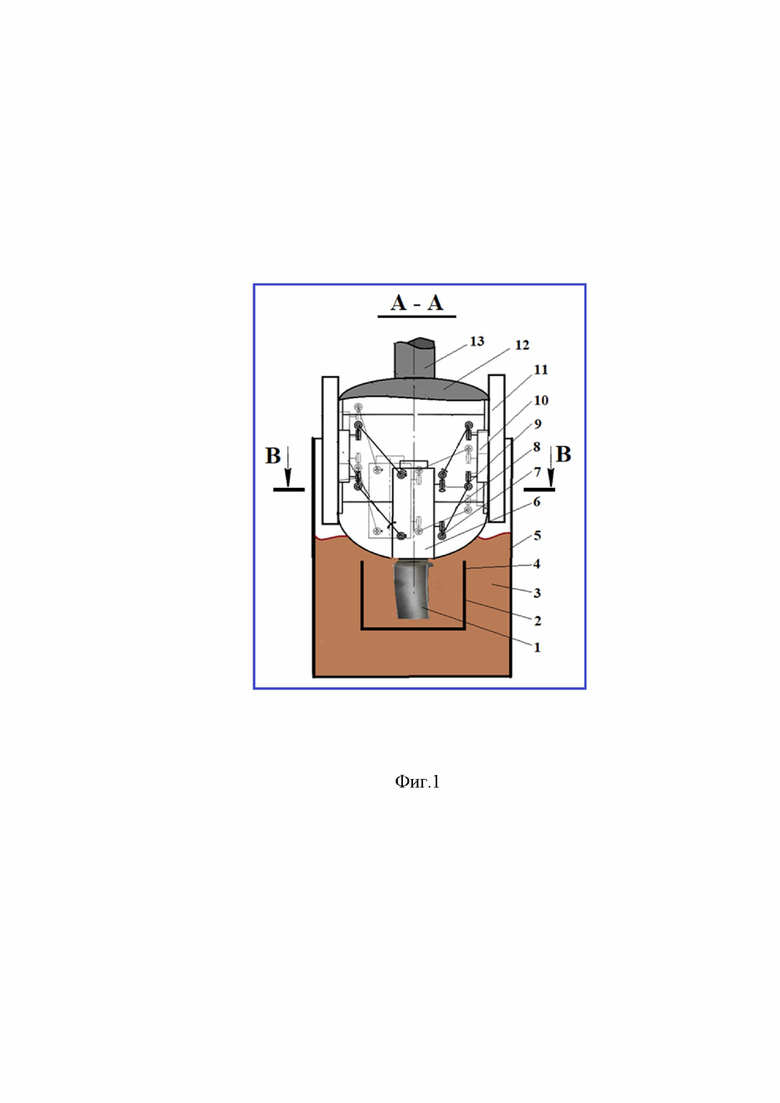
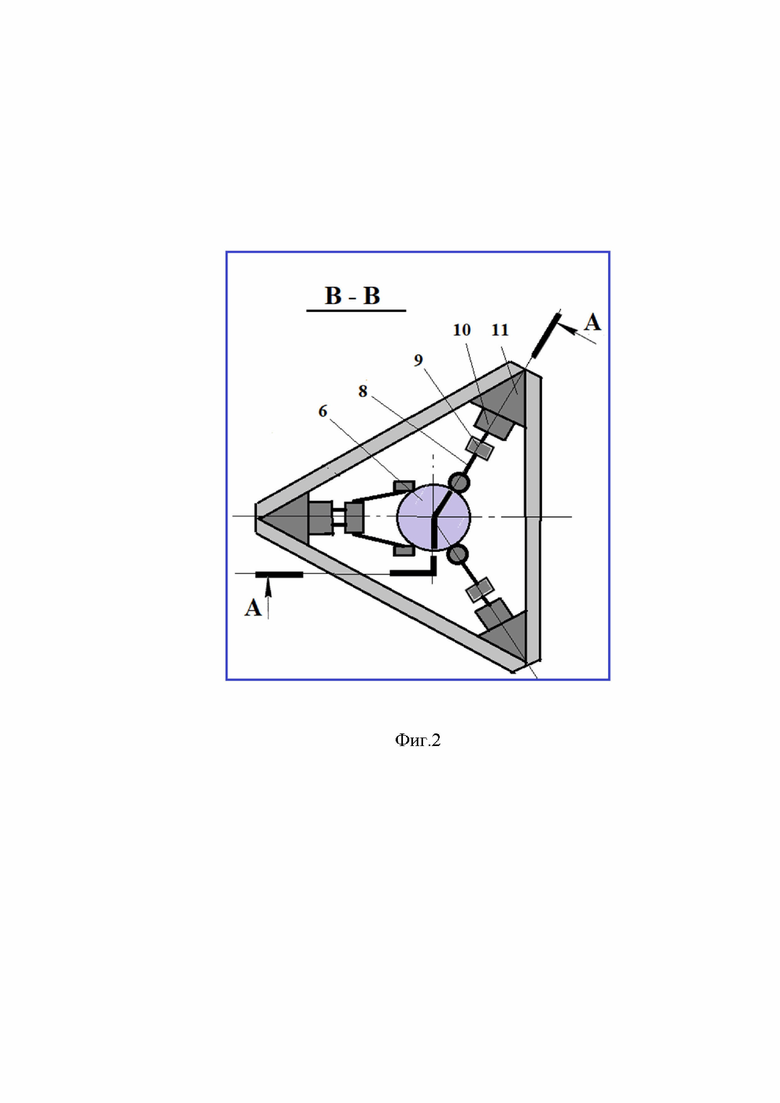
Сущность изобретения поясняется чертежами. На фиг.1 показана установка с держателем изделия с параллельной кинематикой (в продольном разрезе). На фиг. 2 показан держатель изделия с параллельной кинематикой (в поперечном разрезе). На фиг 3 - внешний вид рабочей емкости установки с внешним электродом в виде радиального лопастного колеса. На фигуре 4 представлен внешний вид поверхностей лопаток до и после полирования (4а и 4с - исходные поверхности лопатки пере полированием; 4b и 4d - поверхности лопаток после полирования по способу-прототипу и по предлагаемому способу соответственно.). Фигуры с 1 по 3 содержат: 1 - обрабатываемая деталь, 2 - внешний электрод, 3 - гранулы-аниониты, 4 - лопасть , 5 - рабочая емкость, 6 - держатель изделия, 7 - нижний шарнир, 8 - штанга, 9 - верхний шарнир , 10 - салазки, 11 - направляющие, 12 - крышка, 13 - вал, 14 - третья салазка. (На фиг. 4 b красным эллипсом выделена дефектная зона).
Заявляемый способ электрополирования детали, в частности поверхности пера лопатки в процессе его полирования и работа установки осуществляется следующим образом.
На держателе закрепляют обрабатываемую деталь 1 и размещают ее в рабочую емкость 5 внутри внешнего электрода 2 (фиг.1 и фиг 3), таким образом, чтобы вся обрабатываемая поверхность детали 1 была полностью погружена в рабочую среду из гранул-анионитов 3. Приводят во вращательное движение внешний электрод 2, выполненный в виде радиального лопастного колеса, причем направление его вращения осуществляют лопастями наклоненными вперед. При вращении внешний электрод 2 обеспечивает захват и перемещение гранул относительно обрабатываемой поверхности детали 1. При этом, должен обеспечиваться электрический контакт всей полируемой поверхности детали 1 с гранулами-анионитами 3, а гранул-анионитов 3 между собой и с вращающимся электродом 2. При этом возникает интенсивное перемещение гранул-анионитов 3 относительно друг друга, а также относительно обрабатываемой детали 1 и вращающегося электрода 2. Тем самым создаются благоприятные условия для протекания процессов электрохимического массобмена, что обеспечивает однородный ионный унос материала с обрабатываемой детали 1. Последнее обстоятельство приводит к повышению качества и производительности электрополирования. Этому также способствует близкое расположение внешнего электрода 2 к поверхности обрабатываемой детали 1, приводящее к снижению электрического сопротивления системы «электрод-гранулы-деталь».
Для обеспечения однородной обработки поверхности детали 1 используют держатель изделия 6, выполненный с возможностью перемещения детали 1 по меньшей мере по трем осям координат. Перемещают деталь 1 одновременно по трем осям координат, обеспечивая равномерное омывание гранулами-анионитами 3 обрабатываемой поверхности детали 1 при обеспечении контакта всей полируемой поверхности детали 1 с гранулами-анионитами 3 и гранул-анионитов 3 между собой и с внешним электродом 2.
При этом, держатель изделий 6 может быть закреплен на валу 13 установки через механизм с параллельной кинематикой (фиг. 1 и фиг.2). держатель изделий 6 с механизмом с параллельной кинематикой включает следующие элементы.
При этом держатель изделия 6 закреплен на механизме через систему шарниров 7 и штанг 8 с возможностью перемещения по трем осям координат. Салазки 10 перемещаясь по направляющим 11 через систему шарниров (7, 9) и штанги 8 обеспечивают заданное по программе перемещение держателя изделия 6 по трем осям координат.
На устройстве для закрепления механизма с параллельной кинематикой, смонтированы направляющие 11 (фиг.1 и фиг.2), по которым перемещаются салазки 10 (привод салазок не показан, это может быть передача винт-гайка, линейный двигатель и др.). На салазках 10 смонтированы два шарнира 9 с двумя степенями свободы и расположенные параллельно направляющей 11. Держатель изделия 6 закреплен оппозитно расположенных двум салазкам 11, через шарниры 7 , аналогичные по конструкции и взаимной ориентации шарнирам 9. Система шарниров 7, 9 связаны штангами 8, образуя параллелограммы. На третьей салазке 14 также выполнены верхний 9 и нижний 7 шарниры. Система шарниров 7, 9 и штанг 8 образуют параллелограммы с общими горизонтальными осями.
Для увеличения степеней свободы перемещения детали 1 вал 13 установки согласно введенной программе управления перемещением детали 1 приводится во вращение при изменении угла наклона оси вала 13 относительно своего нейтрального положения. Управляющая программа для перемещения может вводиться например посредством УЧПУ и обеспечивает согласованное позиционирование салазок 10 и 14 по координате Z по алгоритму, реализующему заданный вариант траектории перемещения держателя изделия 6 и вала 13 .
Для повышения однородности обработки, в случае обработки деталей сложной формы можно также дополнительно воздействовать на систему «электрод-гранулы-деталь» вибрацией. Вибрационное движение детали 1 относительно внешнего электрода 2 можно осуществлять при возвратно-поступательном движении детали 1 , вдоль ее продольной оси, например с частотой от 30 до 200 Гц, амплитудой от 0,1 до 2 мм.
Электрополирование детали 1 (фиг.1) проводят посредством протекания электрохимических процессов (ионного уноса материала детали 1) между деталью 1 и внешним электродом 2 через гранулы-аниониты, пропитанные раствором электролита, обеспечивающего их электропроводность и ионный унос металла с поверхности детали 1 с удалением с нее микровыступов.
В качестве гранул-анионитов используют ионообменные смолы полученные на основе сополимеризации либо полистирола, либо полиакрилата и дивинилбензола. Средние размеры гранул-анионитов выбирают из диапазона от 0,05 до 0,6 мм.
Электрополирование проводят либо подавая на деталь 1 положительный, а на внешний электрод 2 отрицательный электрический потенциал, величиной от 12 до 35 В, либо в импульном режиме со сменой полярности, при диапазоне частот импульсов от 20 до 100 Гц, периода импульсов от 50 мкс до 10 мкс, при амплитуде тока положительной полярности во время импульса +50 А и их длительности 0,4 до 0,8 мкс, при амплитуде тока отрицательной полярности во время импульса - 20 А, и их длительности 0,2 до 0,4 мкс, при прямоугольной форме выходных импульсов тока и длительности пауз между импульсами от 49,6 мкс до 9,2 мкс.
При полировании лопатки турбомашины, выполненной из легированной стали, в качестве электролитов для пропитки гранул из анионитов используют один из следующих водных растворов: или NH4F, концентрацией от 6 до 24 г/л, или NaF, концентрацией от 4 до 18 г/л, или KF концентрацией от 35 до 55 г/л, или смеси NH4F и KF при содержании NH4F - от 5 до 15 г/л и KF - от 30 до 50 г/л, или смеси NaF и KF при содержании NaF - от 3 до 14 г/л и KF - от 35 до 60 г/л, или смеси NH4F и NaF при содержании NH4F - от 4 до 12 г/л и KF - от 35 до 55 г/л, или смеси NH4F , NaF и KF при содержании NH4F - от 3 до 9 г/л и KF - от 20 до 30 г/л, и NaF - от 10 до 25 г/л, или смеси NH4F и HF при содержании NH4F - от 5 до 15 г/л и HF - от 3 до 5 г/л, или от 8 до 14% водном растворе NaNO3, или в электролитах составов, мас.%: (NH4)2SO4 - 5; Трилон Б - 0,8, или содержащий серную и орто-фосфорную кислоты, блок-сополимер окисей этилена и пропилена и натриевую соль сульфированного бутилолеата при следующем соотношении компонентов, мас.%:
При полировании лопатки турбомашины выполненной из титанового сплава, в качестве электролитов для пропитки гранул из анионитов используют один из следующих водных растворов: или водный раствор смеси NH4F и KF при содержании NH4F - от 8 до 14 г/л и KF - от 36 до 48 г/л, или водного раствора с содержанием 30 - 50 г/л KF⋅2H2O и 2 - 5 г/л CrO3.
При полировании лопатки турбомашины выполненной из никелевого сплава, в качестве электролитов для пропитки гранул из анионитов используют один из следующих водных растворов: водный раствор соли фторида аммония концентрацией 6 - 9,0 г/литр, или водный раствор сульфата аммония с концентрацией 0,8…3,4 или водный раствор, содержащий серную и орто-фосфорную кислоты, блок-сополимер окисей этилена и пропилена и натриевую соль сульфированного бутилолеата при следующем соотношении компонентов, мас. %:
Процесс полирования осуществляют до получения заданной величины шероховатости поверхности пера лопатки.
Были проведены также следующие исследования по полированию деталей (лопаток турбомашин) из легированых сталей, никелевых и титановых сплавов. Неудовлетворительным результатом считался результат, при котором на полируемой поверхности не наблюдался эффект полирования или происходило недопустимое изменение геометрии пера лопатки. При отсутствии дефектов на поверхности детали результат признавался удовлетворительным.
Во всех случаях, следующие режимы обработки деталей оказались универсальными.
Применяемые аниониты - ионообменные смолы полученные на основе сополимеризации либо полистирола, либо полиакрилата и дивинилбензола. Марки использованных в предлагаемом изобретении анионитов на основе синтетических смол: Анионит 17-8ЧС , Анионит Purolite A520E, Lewatit S 6328 A (на основе сополимера стирол-дивинилбензола), «Lewatit М500», «Lewatit MonoPlus МК 51», «Lewatit MonoPlus MP 68 », Purolite C150E, Purolite A-860 (макропористая сильноосновная анионообменная смола основанная на акрилатах), анионит сульфированный сополимер стирол-дивинилбензола. Перечисленные аниониты пропитанные вышеприведенными составами электролитов, показали положительный результат при полировании лопаток из легированных сталей.
Пример. Сравнительной обработке подвергались рабочие лопатки компрессора ГТД, полученных штамповкой и размерной электрохимической обработкой. Брались лопатки из титанового сплава (ВТ9, ВТ-1, ВТ3-1,) и легированной стали (ЭП718-ИД, ВЖ105-ИД). Обработку вели по предлагаемому способу и способу-прототипу ([WO2017186992]).
Обработку по сравниваемым вариантам проводили по следующим режимама:
- в импульном режиме со сменой полярности, при диапазоне частот импульсов от 60 Гц, периода импульсов 30 мкс, при амплитуде тока положительной полярности во время импульса +50 А и их длительности 0,8 мкс, при амплитуде тока отрицательной полярности во время импульса - 20 А, и их длительности 0,4 мкс, при прямоугольной форме выходных импульсов тока и длительности пауз между импульсами 49,6 мкс.
- электролит для пропитки гранул-анионитов:
- для легированных сталей - водный раствор NH4F, концентрацией 12 г/л.
- для титановых сплавов - водный раствор смеси NH4F и KF при содержании NH4F - 10 г/л и KF 36 г/л.
Условия перемещения деталей в процессе электрополирования:
- по способу прототипу: вращение на эксцентриковом валу при вибрационном воздействии (диаметр рабочей емкости 500 мм, вибрация - осциллирующие движения с частотой 50 Гц и амплитудой 3,5 мм, обороты вращение вала установки - 50 об/мин, время обработки - 80 мин).
- по предлагаемому способу: сложное перемещение согласно программе обработки, связанной с размерами и геометрией пера лопатки с преимущественным перемещением при омывании гранулами спинки и корыта: (диаметр рабочей емкости 500 мм, вибрация - осциллирующие движения с частотой 50 Гц и амплитудой 3,5 мм, обороты вращение вала установки - 50 об/мин, время обработки - 80 мин, одновременное перемещение детали в горизонтальной и вертикальной плоскостях, при изменении угла наклона вала в пределах от 0 до 45 градусов)
Сравнение результатов обработки поверхностей лопаток показали, что при обработке по способу прототипу наблюдаются необработанные или некачественно обработанные участки (фиг.4 a и фиг 4 b). При обработке по предлагаемому способу дефекты в виде необработанных участков не обнаружены (фиг.4 c и фиг 4 d).
По сравнению с известным способом полирования [WO2017186992] при обработке пера лопатки из легированных сталей и титановых сплавов по предлагаемому способу образование дефектов в виде неполированных участков поверхности, недопустимых изменений геометрии пера лопатки практически не наблюдалось, в то время как при обработке по способу-прототипу [WO2017186992] наблюдалось образование перечисленных дефектов.
Таким образом, предложенный способ электрополирования детали позволил достигнуть поставленного в изобретении технического результата - повышение качества и надежности обработки поверхности металлической детали за счет повышения однородности обработки ее поверхности, снижения вероятности появления дефектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сухого электрополирования лопатки турбомашины и установка для его реализации | 2023 |
|
RU2799180C1 |
| Способ электрополирования металлической детали и установка для его реализации | 2022 |
|
RU2786767C1 |
| СПОСОБ ЭЛЕКТРОПОЛИРОВАНИЯ МЕТАЛЛИЧЕСКОЙ ДЕТАЛИ ГРАНУЛАМИ И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2799183C1 |
| СПОСОБ ЭЛЕКТРОПОЛИРОВАНИЯ МЕТАЛЛИЧЕСКОЙ ДЕТАЛИ | 2019 |
|
RU2716292C1 |
| Способ электрохимического полирования внутренних поверхностей металлических трубок и устройство для его реализации | 2022 |
|
RU2785200C1 |
| СПОСОБ ИОННОГО АЗОТИРОВАНИЯ ДЕТАЛИ ИЗ ЛЕГИРОВАННОЙ СТАЛИ | 2022 |
|
RU2786244C1 |
| СПОСОБ ЭЛЕКТРОПОЛИРОВАНИЯ ВНУТРЕННЕГО КАНАЛА МЕТАЛЛИЧЕСКОЙ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2710086C1 |
| СПОСОБ ЭЛЕКТРОПОЛИРОВАНИЯ ЛОПАТКИ ГТД ИЗ ЛЕГИРОВАННОЙ СТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2715396C1 |
| СПОСОБ ЭЛЕКТРОПОЛИРОВАНИЯ МОНОКОЛЕСА С ЛОПАТКАМИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2719217C1 |
| СПОСОБ ОБРАБОТКИ ПЕРФОРАЦИОННЫХ ОТВЕРСТИЙ В ПОЛЫХ ЛОПАТКАХ ТУРБОМАШИНЫ И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2710087C1 |


Изобретение относится к технологии электрополирования деталей из металлов и сплавов и может быть использовано для обработки поверхностей лопаток турбомашин для повышения их эксплуатационных характеристик. Способ включает закрепление детали на держателе изделия, погружение детали в рабочую емкость с гранулами-анионитами, обеспечивающими ионный унос металла с поверхности детали с удалением микровыступов при подаче противоположного по знаку электрического потенциала на деталь и гранулы-аниониты через контактирующий с гранулами-анионитами внешний электрод. При этом используют держатель изделия, выполненный с возможностью перемещения детали по меньшей мере по трем осям координат, перемещают деталь одновременно по трем осям координат, обеспечивая равномерное омывание гранулами-анионитами обрабатываемой поверхности детали. Установка содержит источники электрического питания, блок управления, рабочую емкость с гранулами-анионитами и внешним электродом, обеспечивающим электрический контакт с упомянутыми гранулами-анионитами, и держатель изделия, который выполнен с возможностью перемещения детали по меньшей мере по трем осям координат при вращении вала установки, выполненного с возможностью изменения угла наклона относительно своего нейтрального положения. Технический результат: повышение качества и надежности обработки поверхности металлической детали за счет повышения однородности обработки ее поверхности, снижения вероятности появления дефектов. 2 н. и 8 з.п. ф-лы, 4 ил., 1 пр.
1. Способ электрополирования металлической детали сложной формы, включающий закрепление детали на держателе изделия, закрепленном на валу установки, погружение детали в рабочую емкость с гранулами-анионитами, пропитанными раствором электролита, обеспечивающего их электропроводность и ионный унос металла с поверхности детали с удалением микровыступов при подаче противоположного по знаку электрического потенциала на деталь и гранулы-аниониты через контактирующий с гранулами-анионитами внешний электрод, отличающийся тем, что используют держатель изделия, выполненный с возможностью перемещения детали по меньшей мере по трем осям координат, перемещают деталь одновременно по трем осям координат, обеспечивая равномерное омывание гранулами-анионитами обрабатываемой поверхности детали при обеспечении контакта всей полируемой поверхности детали с гранулами-анионитами и гранул-анионитов между собой и с внешним электродом.
2. Способ по п. 1, отличающийся тем, что в качестве держателя изделий используют механизм с параллельной кинематикой.
3. Способ по п. 2, отличающийся тем, что при перемещении детали по трем осям координат подвергают ее вибрации и производят вращение детали вокруг оси вала установки при одновременном изменении угла наклона детали относительно нейтрального положения оси вала.
4. Способ по п. 1, отличающийся тем, что при перемещении детали по трем осям координат производят ее вращение вокруг оси вала установки.
5. Способ по п. 1, отличающийся тем, что при перемещении детали по трем осям координат производят ее вращение вокруг оси вала установки при одновременном изменении угла наклона детали относительно оси вала.
6. Способ по любому из пп. 1-5, отличающийся тем, что используют внешний электрод, охватывающий с зазором обрабатываемую деталь, которую подвергают вибрации с частотой от 15 до 50 Гц и амплитудой от 0,5 до 10 мм.
7. Установка для электрополирования металлической детали, содержащая источники электрического питания для электрополирования и осуществления рабочих движений механизмов установки, блок управления, рабочую емкость с гранулами-анионитами и внешним электродом, обеспечивающим электрический контакт с гранулами-анионитами, пропитанными раствором электролита, обеспечивающего их электропроводность и ионный унос металла с поверхности детали с удалением микровыступов, и по крайней мере один закрепленный на выполненном с возможностью вращения валу установки держатель изделия, выполненный с возможностью размещения и перемещения детали в среде гранул-анионитов с обеспечением подачи противоположных по знаку электрических потенциалов для электрополирования на внешний электрод и обрабатываемую деталь, устройство для обеспечения вибрации гранул-анионитов, отличающаяся тем, что держатель изделия выполнен с возможностью перемещения детали по меньшей мере по трем осям координат при вращении вала установки, выполненного с возможностью изменения угла наклона относительно своего нейтрального положения.
8. Установка по п. 7, отличающаяся тем, что в качестве держателя изделий используют механизм с параллельной кинематикой.
9. Установка по п. 8, отличающаяся тем, что качестве механизма с параллельной кинематикой используют механизм, содержащий основание, три стойки, салазки, смонтированные с возможностью перемещения по вертикальным направляющим стоек, установленный в корпусе зажим, три пары штанг, размещенных в каждой паре параллельно между собой и соединяющих корпус и салазки посредством шарниров, стол для установки обрабатываемой детали.
10. Установка по п. 9, отличающаяся тем, что механизм с параллельной кинематикой снабжен дополнительной парой штанг, расположенных параллельно между собой, и пластинами, установленными по периметру между стойками на уровне их вертикальных направляющих, при этом каждая из пар штанг расположена в соответствующей вертикальной плоскости, одни из концов штанг дополнительной пары соединены общими шарнирами с соответствующими концами штанг одной из пар и с салазками, а другие концы штанг дополнительной пары соединены с корпусом посредством шарниров, расположенных относительно оси корпуса попарно симметрично размещенным на корпусе шарнирам штанг пары, причем вертикальные плоскости, в которых размещены штанги дополнительной пары и штанги пары, расположены под острым углом друг к другу.
| WO 2017186992 A1, 02.11.2017 | |||
| СПОСОБ СУХОГО ЭЛЕКТРОПОЛИРОВАНИЯ ДЕТАЛИ | 2020 |
|
RU2730306C1 |
| СПОСОБ ЭЛЕКТРОПОЛИРОВАНИЯ ЛОПАТОК БЛИСКА | 2018 |
|
RU2700229C1 |
| CN 214059921 U, 27.08.2021. | |||

