Изобретение относится к области позиционирования транспортного объекта (ТО) и может быть использовано при управлении ТО в режиме автоматического управления для определения его положения и точной остановки.
Известен способ оценки собственного положения подвижного объекта, содержащий следующие этапы, на которых обнаруживают положение ориентира для ориентира, присутствующего в окружении подвижного объекта, посредством контроллера, установленного на подвижном объекте, вычисляют величину перемещения подвижного объекта посредством контроллера, накапливают в качестве фрагментов данных положений ориентиров положения ориентиров, каждое из которых получают посредством перемещения обнаруженного положения ориентира на обнаруженную величину перемещения посредством контроллера, на основе картографической информации, включающей данные о положении ориентиров для ориентиров, присутствующих на карте, посредством контроллера согласуют фрагменты данных положений ориентиров в определённой области с положениями ориентиров, включёнными в картографическую информацию, и оценивают собственное положение подвижного объекта посредством контроллера, перемещение подвижного объекта определяют с учетом данных системы спутниковой навигации, причём определённая область задаётся на основании факторов ошибки в записях перемещения подвижного объекта, движущегося в текущее положение (RU 2668459 C1, G05D 1/02, 01.10.2018).
Недостатками данного устройства являются быстрая потеря точности оценки положения объекта при потере сигнала GPS, а также длительное время установления стационарного режима работы.
Наиболее близким аналогом к предлагаемому изобретению является способ, состоящий в использовании фазовых измерений псевдодальности, комплексируемых с измерениями инерциальной навигационной системы (ИНС), и обработкой общего вектора измерений в фильтре Калмана для определения искомых навигационных параметров [D.Kaleev, A.Pereverzev, Yu.Savchenko, A.Silantiev. Error estimation and selection of inertial navigation system parameters for uncoupled integration with multi-antenna systems // 2016 IEEE NW Russia Young Researchers in Electrical and Electronic Engineering Conference (EIConRusNW). Р.414-417].
Недостатками данного способа являются потеря точности оценки положения объекта при пропадании сигнала ИНС, а также существенные вычислительные затраты, обусловленные двухэтапной процедурой обработки спутниковых измерений, и временные затраты, связанные необходимостью начальной выставки ИНС.
Технический результат предлагаемого способа заключается в повышении точности оценки положения подвижного транспортного объекта при пропадании сигнала ГНСС.
Технический результат достигается тем, что в способе позиционирования подвижного транспортного объекта в режиме реального времени по данным спутникового навигационного приемника модуль управления подвижного транспортного объекта определяет текущие координаты своего местоположения на основании которых определяет расстояние до опорного объекта инфраструктуры, координаты которого известны в цифровой модели пути, а также осуществляет проверку текущих координат местоположения транспортного объекта на валидность и при их невалидности передает в вычислитель, установленный на транспортном объекте, данные последних текущих координат местоположения транспортного объекта, отвечающих требованиям валидности, одновременно формируя управляющие сигналы для включения установленных на транспортном объекте одометра и измерителя модуля линейной скорости, результаты измерений которых поступают в вычислитель, который по их измерениям с использованием алгоритма робастной фильтрации оценивает текущее приращение пути, а путем дифференцирования по времени оценивает модуль линейной скорости, по результатам оценки текущего приращения пути на основе данных цифровой модели пути и последних валидных координат местоположения транспортного объекта вычислитель вычисляет местоположение транспортного объекта и расстояние до опорного объекта, которые передает в модуль управления одновременно с оценкой модуля линейной скорости для выработки управления движением транспортного объекта.
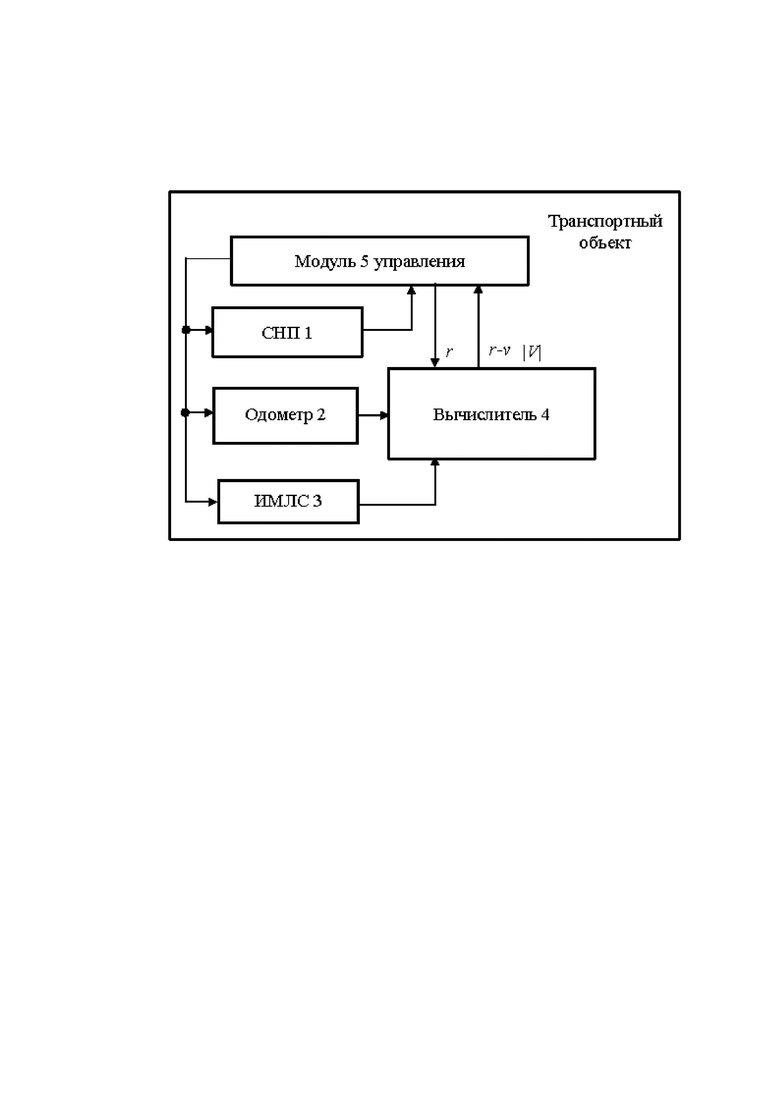
Сущность предлагаемого способа поясняется чертежом, на котором представлена функциональная схема устройства позиционирования подвижного транспортного объекта, реализующего предлагаемый способ позиционирования подвижного ТО.
Устройство позиционирования подвижного транспортного объекта содержит установленные на ТО спутниковый навигационный приемник (СНП) 1, одометр 2, измеритель модуля линейной скорости (ИМЛС) 3 и вычислитель 4, выход которого подключен к первому входу модуля 5 управления ТО, включающий цифровую модель пути (на чертеже не показано), при этом выход СНП 1 подключен ко второму входу модуля 5 управления ТО, первый выход которого соединен с входами управления одометра 2 и ИМЛС 3, а вход/выход – с входом/входом вычислителя 4.
В качестве ИМЛС 3 используют, например, доплеровский измеритель скорости или лидар в режиме измерения скорости и др.
Способ позиционирования подвижного ТО реализуется следующим образом.
В режиме реального времени с выхода СНП 1 на вход модуля 5 управления ТО поступают данные о текущих координатах ТО, что позволяет определять текущее расстояние ТО до опорного объекта инфраструктуры, координаты которого известны в цифровой модели пути (ЦМП). При этом модуль 5 управления постоянно осуществляет проверку на валидность полученных данных от СНП 1, используя соответствующие алгоритмы программного обеспечения ГЛОНАСС (Интерфейсный контрольный документ для сигналов ГЛОНАСС, редакция 1.0, 2016 г. URL:/ https://russianspacesystems.ru/bussines/navigation/glonass/interfeysnyy-kontrolnyy-dokument/ Дата обращения 25.05.2023).
На некотором расстоянии от опорного объекта инфраструктуры (например, при подъезде к железнодорожной станции) данные СНП 1 становятся невалидными.
При определении невалидности данных СНП 1 модуль 5 управления сохраняет в памяти последние валидные данные СНП 1 и формирует команду на включение одометра 2 и ИМЛС 3 (Интерфейсный контрольный документ для сигналов ГЛОНАСС, редакция 1.0, 2016 г. URL:/ https://russianspacesystems.ru/bussines/navigation/glonass/interfeysnyy-kontrolnyy-dokument/, дата обращения 25.05.2023).
Измерения одометра 2 и ИМЛС 3 поступают на входы вычислителя 4. Кроме того, в вычислитель 4 модуль 5 управления передает результаты измерения расстояния ТО до опорного объекта инфраструктуры r на момент включения одометра 2 и ИМЛС 3 (по данным последних текущих координат местоположения транспортного объекта, отвечающих требованиям валидности).
В вычислителе 4 с использованием цифровой модели пути и измерений одометра 3 и ИМЛС 4 определяются текущее расстояние ТО до опорного объекта инфраструктуры (r- и текущие значения оценки |
и текущие значения оценки | | модуля скорости ТО |V|, поступающие далее на второй вход модуля 5 управления для выработки режима управления скоростью ТО. Вычислитель 4 производит оценку || модуля скорости и оценку
| модуля скорости ТО |V|, поступающие далее на второй вход модуля 5 управления для выработки режима управления скоростью ТО. Вычислитель 4 производит оценку || модуля скорости и оценку  текущего приращения пути ϑ =
текущего приращения пути ϑ = с момента фиксации модулем 5 управления невалидности измерений СНП 1 следующим образом.
с момента фиксации модулем 5 управления невалидности измерений СНП 1 следующим образом.
Выходной сигнал Z одометра 2, пропорциональный длине пройденного пути, имеет следующий вид:
 , (1)
, (1)
где  – случайная погрешность измерения пройденного пути, в общем случае с неизвестными вероятностными характеристиками.
– случайная погрешность измерения пройденного пути, в общем случае с неизвестными вероятностными характеристиками.
Помимо сигнала одометра 2 для получения оценки  используют также измерения модуля скорости
используют также измерения модуля скорости  по показаниям ZS ИМЛС 3:
по показаниям ZS ИМЛС 3:
 , (2)
, (2)
где  – случайная погрешность измерения модуля линейной скорости, в общем случае с неизвестными вероятностными характеристиками.
– случайная погрешность измерения модуля линейной скорости, в общем случае с неизвестными вероятностными характеристиками.
Уравнение (2) относительно переменной приращения пути ϑ представляет собой дифференциальное уравнение:
 ,
,
которое с учетом дискретного характера реальных измерений ИМЛС 3 имеет вид:
 (3)
(3)
где h – временной шаг измерения;
k – номер временного отсчета.
Измерения одометра 2 также имеют дискретный характер, и уравнение его измерений (1) в дискретной форме можно записать следующим образом:
 . (4)
. (4)
Наличие разностного уравнения переменной ϑ (3) и уравнения ее наблюдения (4) позволяет использовать для оценки приращения пути  методы дискретной стохастической фильтрации, широко применяемые для оценки дискретных динамических систем.
методы дискретной стохастической фильтрации, широко применяемые для оценки дискретных динамических систем.
Поскольку для оценки текущего значения приращения пути  , определяющего положение ТО, используются измерения одометра 2 (4), имеющие погрешности с неизвестными вероятностными характеристиками, то необходимо использовать метод робастной фильтрации. Исходя из опыта эксплуатации используемых измерителей, случайные погрешности измерений одометра 2 (4) можно считать случайными процессами, имеющими распределения с ограниченными средними квадратами, и использовать при оценке текущего приращения пути робастный фильтр, в основу построения которого положены следующие теоретические выводы.
, определяющего положение ТО, используются измерения одометра 2 (4), имеющие погрешности с неизвестными вероятностными характеристиками, то необходимо использовать метод робастной фильтрации. Исходя из опыта эксплуатации используемых измерителей, случайные погрешности измерений одометра 2 (4) можно считать случайными процессами, имеющими распределения с ограниченными средними квадратами, и использовать при оценке текущего приращения пути робастный фильтр, в основу построения которого положены следующие теоретические выводы.
Пусть объект, вектор состояния которого Хk подлежит оцениванию, описывается нелинейным стохастическим разностным уравнением вида:
 (5)
(5)
где k – номер дискретного момента времени;
 известные нелинейные векторная и матричная функции размерности, соответственно, N и N*M;
известные нелинейные векторная и матричная функции размерности, соответственно, N и N*M;
 вектор-шум объекта размерности M с неизвестной плотностью распределения, принадлежащей классу распределений с ограниченными средними квадратами.
вектор-шум объекта размерности M с неизвестной плотностью распределения, принадлежащей классу распределений с ограниченными средними квадратами.
Измерения вектора состояния Хk , осуществляемые наблюдателем, могут быть записаны в следующем виде:
 (6)
(6)
где zk – вектор измерений размерности К;
 известная матрица размерности К*N;
известная матрица размерности К*N;
 вектор погрешности измерения размерности К с неизвестной плотностью распределения, принадлежащей классу распределений с ограниченными средними квадратами.
вектор погрешности измерения размерности К с неизвестной плотностью распределения, принадлежащей классу распределений с ограниченными средними квадратами.
Исходя из вида уравнения (5), описывающего динамику стохастического вектора состояния Xk, оценку  вектора Xk будем искать в следующей рекуррентной форме:
вектора Xk будем искать в следующей рекуррентной форме:
 (7)
(7)
где  - вектор-функция, определяемая из условия обеспечения робастности оценки (7), т.е. из условия минимума погрешности оценивания при неизвестных распределениях шума объекта и измерения, принадлежащих классу распределений с ограниченными средними квадратами.
- вектор-функция, определяемая из условия обеспечения робастности оценки (7), т.е. из условия минимума погрешности оценивания при неизвестных распределениях шума объекта и измерения, принадлежащих классу распределений с ограниченными средними квадратами.
В качестве исходной формы минимизируемого функционала предварительно рассмотрим классический функционал
 , обеспечивающий в классе распределений с ограниченными средними квадратами наилучшую точность оценивания [Справочник по теории автоматического управления / Под ред. Красовского А.А. М.: Наука. Гл. ред. физ.-мат. лит., 1987. 712 с.]. При этом вид функции, стоящей под знаком суммы, позволяет определить ее как неотрицательно определенную для всей области определения аргумента. Это обстоятельство позволяет перейти от минимизации данного функционала к минимизации только функции:
, обеспечивающий в классе распределений с ограниченными средними квадратами наилучшую точность оценивания [Справочник по теории автоматического управления / Под ред. Красовского А.А. М.: Наука. Гл. ред. физ.-мат. лит., 1987. 712 с.]. При этом вид функции, стоящей под знаком суммы, позволяет определить ее как неотрицательно определенную для всей области определения аргумента. Это обстоятельство позволяет перейти от минимизации данного функционала к минимизации только функции:
 ,
,
а с учетом принадлежности и функции распределения шума объекта классу распределений с ограниченными средними квадратами, окончательно сформировать минимизируемый функционал J в виде:
 (8)
(8)
где α – параметр регуляризации, обеспечивающий возможность адаптации алгоритма робастной оценки при его практическом использовании.
Для последующего определения искомой функции  продифференцируем
продифференцируем  (8) по
(8) по  :
:

= –2 (
(
и приравняв далее полученное выражение к 0, получим:

откуда определяем требуемую функцию  :
:

Подставляя найденное выражение  в уравнение оценки (7), имеем:
в уравнение оценки (7), имеем:

Т.к. правая часть полученного уравнения зависит от текущей оценки , то для окончательного определения преобразуем уравнение (9) следующим образом:

где E - единичная матрица размерности N.
Откуда окончательно имеем искомый рекуррентный алгоритм робастного оценивания:
 (10)
(10)
Для рассмотренных выше объекта (3) и наблюдателя (4) робастный алгоритм (10), реализуемый в вычислителе 4 и обеспечивающий оценку приращения пути, имеет вид:

Для определения оценки модуля скорости ТО | |, поступающей с выхода вычислителя 4 на второй вход модуля 5 управления и используемой в алгоритмах управления ТО, вычислитель 4 осуществляет численное дифференцирование по времени полученной оценки (11). Далее с использованием цифровой модели пути вычислитель 4 определяет текущее расстояние ТО до опорного объекта инфраструктуры (r-), которое вместе с текущим значением оценки модуля скорости ТО || поступает на второй вход модуля 5 управления для выработки управляющего воздействия ТО. По достижении нулевого значения текущего расстояния ТО до опорного объекта инфраструктуры происходит остановка ТО.
|, поступающей с выхода вычислителя 4 на второй вход модуля 5 управления и используемой в алгоритмах управления ТО, вычислитель 4 осуществляет численное дифференцирование по времени полученной оценки (11). Далее с использованием цифровой модели пути вычислитель 4 определяет текущее расстояние ТО до опорного объекта инфраструктуры (r-), которое вместе с текущим значением оценки модуля скорости ТО || поступает на второй вход модуля 5 управления для выработки управляющего воздействия ТО. По достижении нулевого значения текущего расстояния ТО до опорного объекта инфраструктуры происходит остановка ТО.
Таким образом, предлагаемый способ позволяет повысить точность оценки положения подвижного транспортного объекта при пропадании сигнала ГНСС и эффективно решать задачи навигации и управления как современных, так и перспективных ТО, в том числе и при автоматическом ведении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ И ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ РЕЛЬСОВОГО ТРАНСПОРТА С ИСПОЛЬЗОВАНИЕМ ИНФОРМАЦИИ О КАРТЕ ПУТЕЙ В АРОЧНО-ЛИНЕЙНОМ ВИДЕ | 2024 |
|
RU2839177C1 |
| Бортовое устройство позиционирования рельсового транспортного средства | 2023 |
|
RU2799734C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| СПОСОБ ВИЗУАЛЬНОЙ ЛОКАЛИЗАЦИИ ГОРОДСКОГО РЕЛЬСОВОГО ТРАНСПОРТА НА ОСНОВЕ ФИЛЬТРОВ ЧАСТИЦ КАЛМАНА И ДАННЫХ О КАРТИРОВАНИИ | 2023 |
|
RU2807978C1 |
| АВТОНОМНАЯ ОПТИЧЕСКАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И НАВИГАЦИИ | 2023 |
|
RU2816087C1 |
| Способ позиционирования наземного транспортного средства | 2021 |
|
RU2769918C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ МЕСТООПРЕДЕЛЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2638358C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2024 |
|
RU2820026C1 |
| Система поддержания интервала разграничения между последовательно движущимися поездами | 2024 |
|
RU2839168C1 |
| Телематический прибор | 2019 |
|
RU2736321C1 |
Изобретение относится к области позиционирования транспортного объекта (ТО) и может быть использовано при управлении ТО в режиме автоматического управления для определения его положения и точной остановки. Способ позиционирования ТО заключается в том, что в режиме реального времени по данным спутникового навигационного приемника модуль управления ТО определяет текущие координаты своего местоположения, осуществляет их проверку на валидность и при их невалидности передает в вычислитель, установленный на ТО, результаты измерения расстояния ТО до опорного объекта инфраструктуры по данным последних текущих координат местоположения ТО, отвечающих требованиям валидности, одновременно формируя управляющие сигналы для включения установленных на ТО одометра и измерителя модуля линейной скорости. Результаты измерений одометра и измерителя модуля линейной скорости поступают в вычислитель, который по их измерениям с использованием алгоритма робастной фильтрации оценивает текущее приращение пути и дифференцированием по времени - модуль линейной скорости, по результатам оценки текущего приращения пути на основе данных цифровой модели пути и последних валидных координат местоположения ТО вычислитель вычисляет местоположение ТО и расстояние до опорного объекта, которые передает в модуль управления одновременно с оценкой модуля линейной скорости для выработки управления движением ТО. Технический результат – повышение точности оценки положения подвижного ТО при пропадании сигнала ГНСС. 1 ил.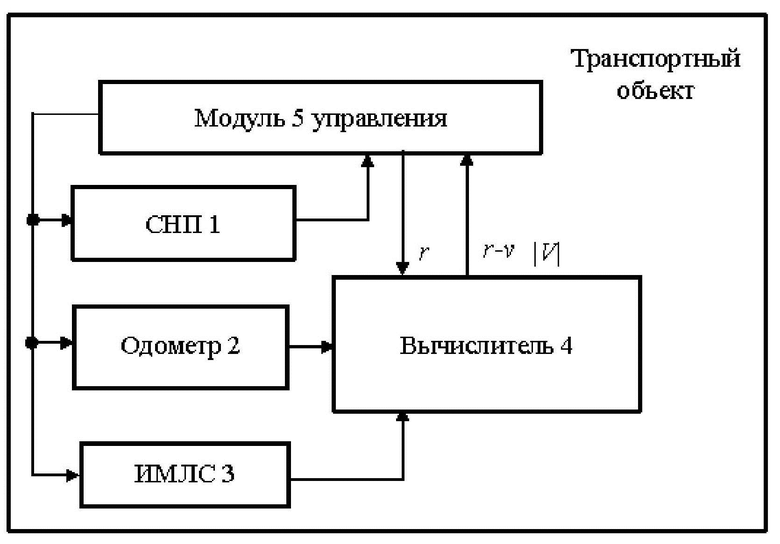
Способ позиционирования транспортного объекта, характеризующийся тем, что в режиме реального времени по данным спутникового навигационного приемника модуль управления подвижного транспортного объекта определяет текущие координаты своего местоположения, осуществляет их проверку на валидность и при их невалидности передает в вычислитель, установленный на транспортном объекте, результаты измерения расстояния ТО до опорного объекта инфраструктуры по данным последних текущих координат местоположения транспортного объекта, отвечающих требованиям валидности, одновременно формируя управляющие сигналы для включения установленных на транспортном объекте одометра и измерителя модуля линейной скорости, результаты измерений одометра и измерителя модуля линейной скорости поступают в вычислитель, который по их измерениям с использованием алгоритма робастной фильтрации оценивает текущее приращение пути, путем дифференцирования по времени оценивает модуль линейной скорости, по результатам оценки текущего приращения пути на основе данных цифровой модели пути и последних валидных координат местоположения транспортного объекта вычислитель вычисляет местоположение транспортного объекта и расстояние до опорного объекта, которые передает в модуль управления одновременно с оценкой модуля линейной скорости для выработки управления движением транспортного объекта.
| УСТРОЙСТВО ОЦЕНКИ ПОЛОЖЕНИЯ И СПОСОБ ОЦЕНКИ ПОЛОЖЕНИЯ | 2015 |
|
RU2668459C1 |
| RU 138441 U1, 20.03.2014 | |||
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОЕЗДОВ С ПРОВЕРКОЙ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ ДОСТОВЕРНОСТИ ОЦЕНКИ ПОЛОЖЕНИЯ | 2011 |
|
RU2584957C2 |
| DE 602005003551 D1, 10.01.2008 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |

