ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение относится к самодвижущемуся устройству.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[002] Самодвижущиеся устройства, такие как уборочные устройства, не могут определять информацию о расстоянии до препятствий с низкой отражающей способностью (таких как черные препятствия и т. п.), поэтому самодвижущиеся устройства не могут обходить такие препятствия, и происходят столкновения.
[003] В настоящее время датчик измерения расстояния уборочного устройства имеет одну конструкцию и простую функцию, которая может только обеспечить обхождение препятствий с высокой отражающей способностью, но будет происходить столкновение с препятствиями с низкой отражающей способностью, таким образом, это значительно влияет на опыт пользователя. Лазерные датчики с высокой точностью измерения расстояния имеют высокую стоимость, и их не легко сделать известными.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[004] Целью настоящего изобретения является предоставление самодвижущегося устройства.
[005] Для достижения вышеуказанной цели в настоящем изобретении предусмотрено следующее техническое решение.
[006] Предусмотрено самодвижущееся устройство. Самодвижущееся устройство содержит корпус, узел перемещения, расположенный на корпусе, и систему управления, расположенную в корпусе. Самодвижущееся устройство дополнительно содержит оптическое приемное устройство и по меньшей мере два оптических излучающих устройства, расположенных на корпусе. Пути излученного света, излучаемого по меньшей мере двумя оптическими излучающими устройствами, различны. Оптическое приемное устройство выполнено с возможностью приема отраженного света, образованного после того, как излученный свет, излучаемый по меньшей мере одним из оптических излучающих устройств, попадает на препятствие.
[007] Кроме того, излученный свет, излучаемый каждым из оптических излучающих устройств, образует угол θ сходимости с центральной линией оптического приемного устройства, и угол сходимости составляет больше 0°.
[008] Кроме того, оптическое излучающее устройство из двух смежных оптических излучающих устройств, которое находится дальше от оптического приемного устройства, образует первый угол сходимости с центральной линией оптического приемного устройства; причем оптическое излучающее устройство, находящееся ближе к оптическому приемному устройству, образует второй угол сходимости с центральной линией оптического приемного устройства; и первый угол сходимости меньше, чем второй угол сходимости.
[009] В предпочтительном варианте осуществления по меньшей мере два оптических излучающих устройства расположены с одной и той же стороны оптического приемного устройства.
[0010] В другом предпочтительном варианте осуществления направления излученного света, излучаемого по меньшей мере двумя оптическими излучающими устройствами, отклонены в направлении центральной линии оптического приемного устройства.
[0011] В еще одном предпочтительном варианте осуществления по меньшей мере два оптических излучающих устройства и оптическое приемное устройство расположены в ряд.
[0012] В еще одном предпочтительном варианте осуществления диапазон обнаружения оптического приемного устройства и оптического излучающего устройства не превышает 2 см.
[0013] В еще одном предпочтительном варианте осуществления по меньшей мере два оптических излучающих устройства и оптическое приемное устройство встроены в один оптический модуль.
[0014] В еще одном предпочтительном варианте осуществления оптическое приемное устройство и по меньшей мере два оптических излучающих устройства выполнены с возможностью обнаружения краев самодвижущегося устройства.
[0015] В еще одном предпочтительном варианте осуществления после получения отраженного света оптическое приемное устройство преобразует отраженный свет в сигнал приема света и передает сигнал приема света в систему управления; и система управления выполнена с возможностью определения расстояния между самодвижущимся устройством и препятствием согласно сигналу приема света.
[0016] Положительные эффекты самодвижущегося устройства согласно настоящему изобретению предусматривают: благодаря использованию излученного света, который можно излучать по разным путям, площадь принимаемого излученного света больше, когда он ближе к препятствию. Излученный свет накладывается посредством зеркального отражения и диффузного отражения, тем самым увеличивая интенсивность получаемого света и уменьшая проблему непостоянных расстояний обратной связи до препятствий с разной отражающей способностью, вследствие чего можно эффективно обнаружить препятствия с низкой отражающей способностью и можно реализовать обхождение препятствий с низкой отражающей способностью.
[0017] Приведенное выше описание является только обзором технических решений настоящего изобретения. Для более ясного понимания технических решений настоящего изобретения и реализации их в соответствии с содержанием описания ниже подробно описаны предпочтительные варианты осуществления настоящего изобретения и прилагаемые графические материалы.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
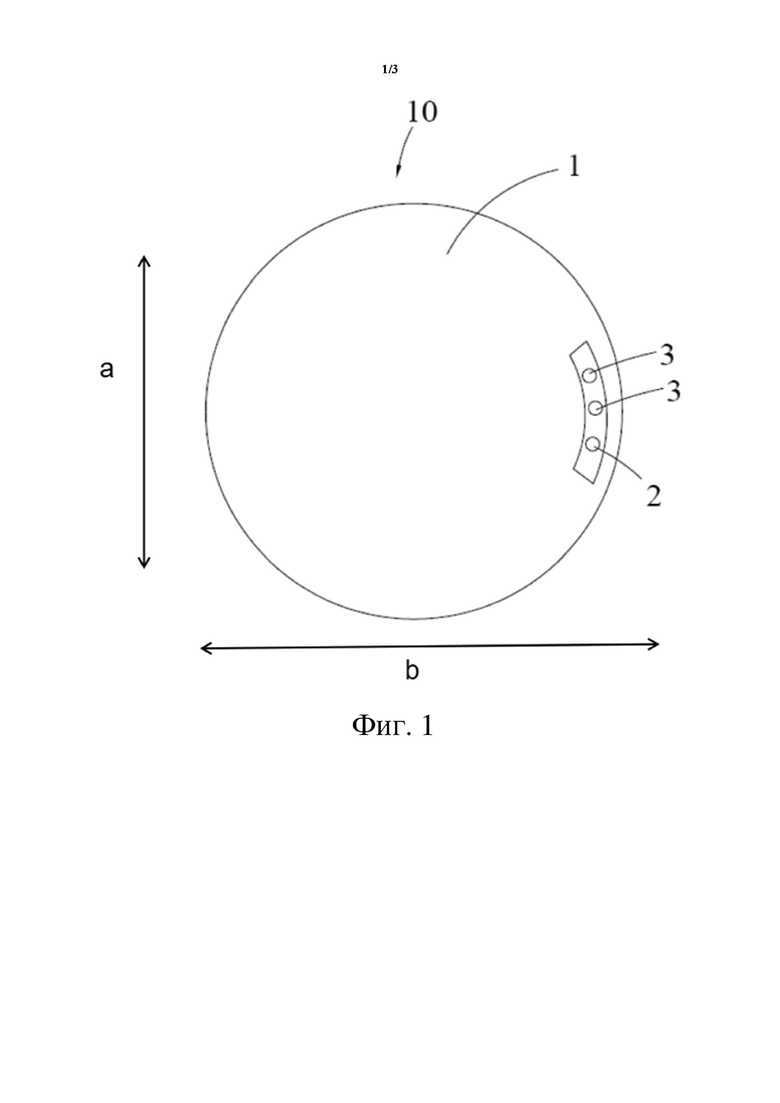
[0018] На фиг. 1 представлен схематический вид конструкции самодвижущегося устройства согласно варианту осуществления изобретения;
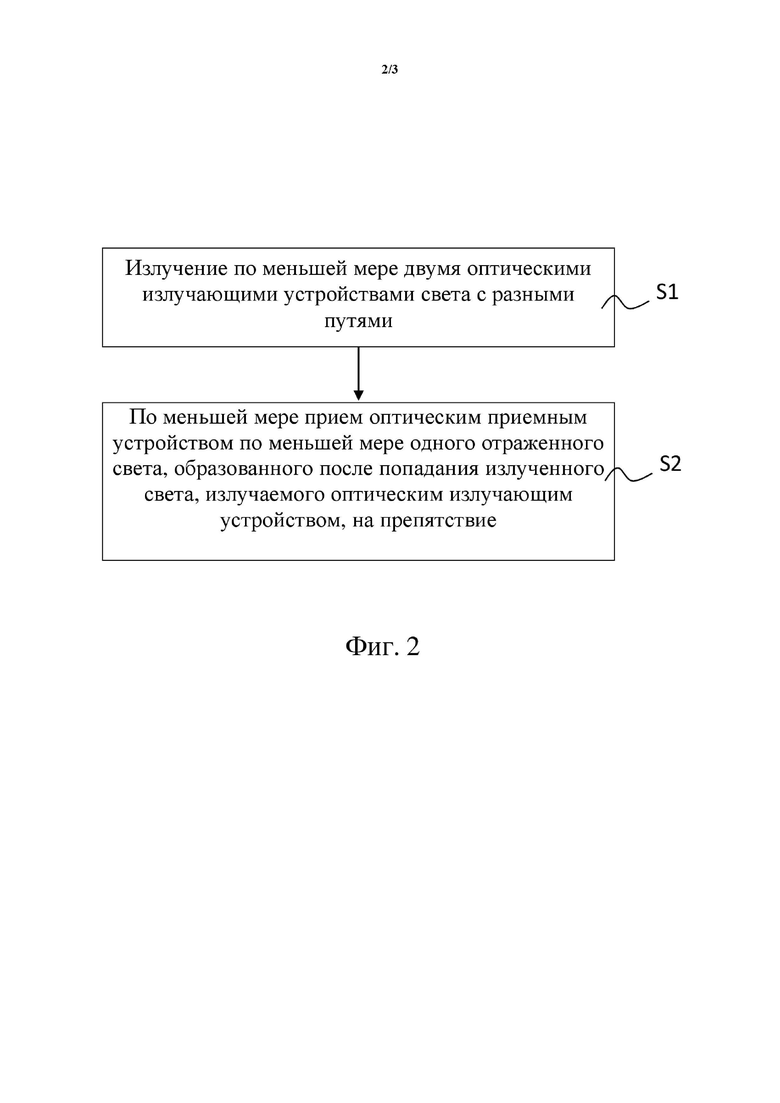
[0019] на фиг. 2 представлена блок-схема способа измерения расстояния самодвижущегося устройства согласно варианту осуществления настоящего изобретения; и
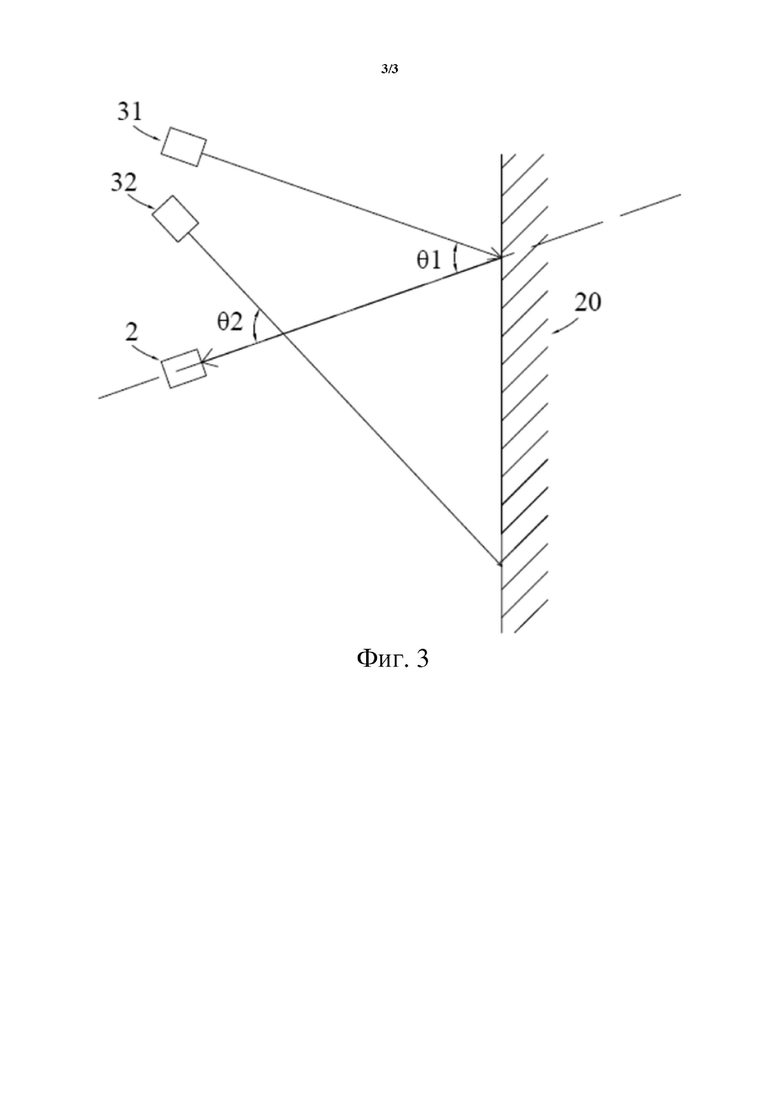
[0020] на фиг. 3 представлен схематический вид отражения, когда самодвижущееся устройство сталкивается с препятствием согласно варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0021] Конкретные реализации настоящего изобретения будут описаны более подробно ниже со ссылкой на прилагаемые графические материалы и варианты осуществления. Следующие примеры используются для иллюстрации настоящего изобретения, но не предназначены для ограничения объема настоящего изобретения.
[0022] Во-первых, введены некоторые условия, связанные с настоящим изобретением:
[0023] Самодвижущееся устройство может быть, например, роботом-уборщиком, поломоечным роботом, роботом для удаления пыли, роботом для удаления препятствий, роботом-газонокосилкой, роботом-чертежником и т. п. В некоторых вариантах осуществления, при реализации, самодвижущееся устройство может быть обеспечено системой планирования пути. Самодвижущееся устройство перемещается согласно пути, установленному системой, и выполняет операции, такие как очистка, удаление пыли, протирание и черчение. Самодвижущееся устройство дополнительно обеспечено блоком измерения расстояния, который используют для измерения расстояния между самодвижущимся устройством и препятствием. Самодвижущееся устройство будет неизбежно сталкиваться с препятствиями во время рабочего процесса. Самодвижущееся устройство также может быть обеспечено модулем беспроводной связи, например модулем WIFI и модулем Bluetooth, для соединения по связи с интеллектуальными терминалами и приема рабочих команд, передаваемых пользователем, использующим интеллектуальные терминалы, через модуль беспроводной связи.
[0024] Оптическое приемное устройство, такое как инфракрасный приемник, используют для приема оптических сигналов.
[0025] Оптическое излучающее устройство, такое как инфракрасный передатчик, используют для излучения оптических сигналов.
[0026] Самодвижущееся устройство в настоящем изобретении в качестве примера является роботом-уборщиком. Способ измерения расстояния согласно настоящему изобретению используют для определения наличия препятствий в процессе перемещения самодвижущегося устройства. Способ измерения расстояния также можно использовать в других самодвижущихся устройствах, которые могут реализовывать управление самостоятельным движением, тогда как применение самодвижущегося устройства конкретно не ограничено.
[0027] Ссылаясь на фиг. 1, робот-уборщик 10, предусмотренный в варианте осуществления настоящего изобретения, содержит корпус 1, узел перемещения (не показан), расположенный на корпусе 1, систему управления (не показана), расположенную в корпусе 1, оптическое приемное устройство 2 и по меньшей мере два оптических излучающих устройства 3, расположенных на корпусе 1. Пути излученного света, излучаемого по меньшей мере двумя оптическими излучающими устройствами 3, различны. Оптическое приемное устройство 2 может принимать по меньшей мере один отраженный свет, образованный после попадания излученного света, излучаемого оптическим излучающим устройством 3, на препятствие. В этом варианте осуществления оптическое приемное устройство 2 и оптическое излучающее устройство 3 расположены на верхней поверхности корпуса. Система управления сигнально соединена с оптическим приемным устройством 2 и оптическим излучающим устройством 3. Система управления управляет оптическим излучающим устройством 3 для излучения излучаемого света (сигнал излучения света). Оптическое приемное устройство 2 принимает отраженный свет (сигнал приема света) и преобразует отраженный свет в сигнал приема света, и передает его в систему управления. Расстояние между роботом-уборщиком 10 и препятствием получают посредством анализа и вычисления системой управления, а затем система управления управляет роботом-уборщиком для выполнения заданных действий. Разумеется, в других вариантах осуществления после приема отраженного света оптическое приемное устройство 2 может также независимо анализировать и вычислять расстояние между роботом-уборщиком и препятствием и затем передавать результат в систему управления.
[0028] Альтернативно излученный свет, излучаемый каждым оптическим излучающим устройством 3, образует угол θ сходимости с центральной линией оптического приемного устройства 2, и угол сходимости составляет больше 0°.
[0029] Альтернативно оптическое излучающее устройство 3 из двух смежных оптических излучающих устройств 3, которое находится дальше от оптического приемного устройства 2, образует первый угол сходимости с центральной линией оптического приемного устройства 2. Оптическое излучающее устройство 3, которое ближе к оптическому приемному устройству, образует второй угол сходимости с центральной линией оптического приемного устройства 2. Первый угол сходимости меньше, чем второй угол сходимости.
[0030] Альтернативно по меньшей мере два оптических излучающих устройства 3 расположены с одной и той же стороны оптического приемного устройства 2.
[0031] Альтернативно направления света, излучаемого по меньшей мере двумя оптическими излучающими устройствами 3, отклонены в направлении центральной линии оптического приемного устройства 2.
[0032] Альтернативно по меньшей мере два оптических излучающих устройства 3 и оптическое приемное устройство 2 расположены в ряд.
[0033] Альтернативно диапазон обнаружения оптического приемного устройства 2 и оптического излучающего устройства 3 не превышает 2 см.
[0034] Альтернативно по меньшей мере два оптических излучающих устройства 3 и оптическое приемное устройство 2 встроены в один оптический модуль.
[0035] Ссылаясь на фиг. 2 и в сочетании с фиг. 1, способ измерения расстояния робота-уборщика 10 согласно настоящему изобретению включает:
S1: излучение по меньшей мере двумя оптическими излучающими устройствами 3 света с разными путями излучения; и
S2: по меньшей мере прием оптическим приемным устройством 2 отраженного света, образованного после попадания излученного света, излучаемого по меньшей мере одним оптическим излучающим устройством 3, на препятствие.
[0036] Альтернативно излученный свет, излучаемый каждым оптическим излучающим устройством 3, образует угол θ сходимости с центральной линией оптического приемного устройства 2, и угол сходимости составляет больше 0°. Из двух смежных оптических излучающих устройств 3 оптическое излучающее устройство 3, которое находится дальше от оптического приемного устройства 2, образует первый угол сходимости с центральной линией оптического приемного устройства 2. Оптическое излучающее устройство 3, которое ближе к оптическому приемному устройству, образует второй угол сходимости с центральной линией оптического приемного устройства 2. Первый угол сходимости меньше, чем второй угол сходимости.
[0037] Таким образом, для робота-уборщика 10 и его способа измерения расстояния используют излученный свет, который можно излучать по разным путям, вследствие чего площадь принимаемого излученного света больше, когда он ближе к препятствию. Излученный свет накладывается посредством зеркального отражения и диффузного отражения, тем самым увеличивая интенсивность получаемого света и уменьшая проблему непостоянных расстояний обратной связи до препятствий с разной отражающей способностью, вследствие чего можно эффективно обнаружить препятствия с низкой отражающей способностью и можно реализовать обхождение препятствий с низкой отражающей способностью, и расстояние обхождения может быть устойчивым.
[0038] Ниже будет подробно описан конкретный вариант осуществления. Ссылаясь на фиг. 1, в этом варианте осуществления количество оптических излучающих устройств 3 равно двум, включая первое оптическое излучающее устройство 31 и второе оптическое излучающее устройство 32. Количество оптических приемных устройств 2 равно одному. Пути излученного света, излучаемого первым оптическим излучающим устройством 31 и вторым оптическим излучающим устройством 32, различны, но оба отклонены в направлении оптического приемного устройства 2. Первое оптическое излучающее устройство 31 и второе оптическое излучающее устройство 32 расположены с одной и той же стороны оптического приемного устройства 2. Первое оптическое излучающее устройство 31, второе оптическое излучающее устройство 32 и оптическое приемное устройство 2 расположены в ряд. Первое оптическое излучающее устройство 31 расположено дальше от оптического приемного устройства 2, чем второе оптическое излучающее устройство 32. Взяв направления на фиг. 1 в качестве примера, направление стрелки a на фиг. 1 представляет собой направление влево-вправо, и направление стрелки b представляет собой направление перемещения робота-уборщика 10, которое определено как направление вперед-назад.
[0039] Первое оптическое излучающее устройство 31 и центральная линия оптического приемного устройства 2 образуют первый угол θ1 сходимости, который больше 0°. Второе оптическое излучающее устройство 32 и центральная линия оптического приемного устройства 2 образуют второй угол θ2 сходимости, который больше 0°. Первый угол θ1 сходимости меньше, чем второй угол θ2 сходимости. Кроме того, на фиг. 1 центральная линия оптического приемного устройства 2 показана пунктирной линией x. В этом варианте осуществления отраженный свет, принятый оптическим приемным устройством 2, представляет собой отраженный свет, образованный после того, как излученный свет, излучаемый первым оптическим излучающим устройством 31, попадает на препятствие. Следовательно, на фиг. 1 центральная линия накладывается на линию отражения первого оптического излучающего устройства 31.
[0040] Технические признаки приведенных выше вариантов осуществления могут произвольно комбинироваться. Для упрощения описания все возможные комбинации технических признаков в приведенных выше вариантах осуществления не описаны. Однако до тех пор, пока в сочетании этих технических признаков нет противоречий, их следует рассматривать как входящие в объем описания в этом описании.
[0041] Приведенные выше примеры представляют собой лишь несколько вариантов осуществления настоящего изобретения, и их описания являются относительно конкретными и подробными, но их не следует рассматривать как ограничение объема настоящего изобретения. Следует отметить, что специалистами в данной области техники, не отступая от концепции настоящего изобретения, может быть внесено несколько модификаций и улучшений, которые все относятся к объему правовой охраны настоящего изобретения. Следовательно, объем правовой охраны патента настоящего изобретения будет определяться прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ И РОБОТ-УБОРЩИК, ВКЛЮЧАЮЩИЙ В СЕБЯ ТАКОВОЙ | 2013 |
|
RU2591912C1 |
| РОБОТ-УБОРЩИК И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2019 |
|
RU2800503C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ДЛЯ МОБИЛЬНОГО РОБОТА | 2005 |
|
RU2304423C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УБОРКИ И СПОСОБ ВОЗВРАТА РОБОТА-УБОРЩИКА К ВНЕШНЕМУ ЗАРЯДНОМУ УСТРОЙСТВУ | 2005 |
|
RU2303387C2 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2719222C1 |
| МНОГОРЕЖИМНЫЙ РАДИОЧАСТОТНЫЙ ДАТЧИК | 2019 |
|
RU2721587C1 |
| СЕНСОР SPR (РАДАР ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ) ДЛЯ ПОМОЩИ В ОСУЩЕСТВЛЕНИИ НАВИГАЦИИ ТЕХНИЧЕСКОГО УСТРОЙСТВА | 2019 |
|
RU2727087C1 |
| СПОСОБЫ И СИСТЕМЫ НА ОСНОВЕ ЛИДАРА (LIDAR) С РАСШИРЕННЫМ ПОЛЕМ ЗРЕНИЯ НА ОСНОВЕ ПАССИВНЫХ ЭЛЕМЕНТОВ | 2019 |
|
RU2745882C1 |
| СПОСОБ КОРРЕКЦИИ ГИРОСКОПИЧЕСКОГО ДАТЧИКА РОБОТА-УБОРЩИКА | 2005 |
|
RU2295704C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2789827C2 |
Изобретение относится к самодвижущемуся устройству. Самодвижущееся устройство содержит корпус, узел перемещения, систему управления, оптическое приемное устройство и два оптических излучающих устройства. Пути излученного света, излучаемого двумя оптическими излучающими устройствами, различны. Оптическое приемное устройство выполнено с возможностью приема отраженного света, образованного после того, как излученный свет, излучаемый одним из оптических излучающих устройств, попадает на препятствие. То оптическое излучающее устройство из двух смежных оптических излучающих устройств, которое находится дальше от оптического приемного устройства, образует первый угол сходимости с центральной линией оптического приемного устройства. Оптическое излучающее устройство, находящееся ближе к оптическому приемному устройству, образует второй угол сходимости с центральной линией оптического приемного устройства. Первый угол сходимости меньше, чем второй угол сходимости. Достигается предотвращение столкновения с препятствиями с низкой отражающей способностью. 7 з.п. ф-лы, 3 ил.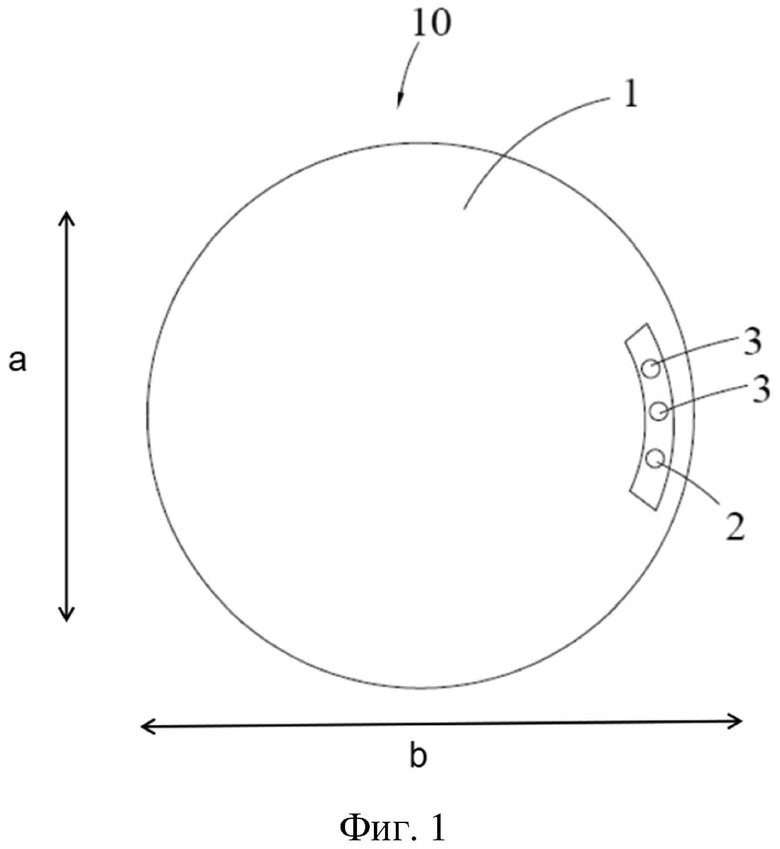
1. Самодвижущееся устройство, содержащее: корпус, узел перемещения, расположенный на корпусе, и систему управления, расположенную в корпусе, причем самодвижущееся устройство дополнительно содержит оптическое приемное устройство и по меньшей мере два оптических излучающих устройства, расположенных на корпусе, причем пути излученного света, излучаемого по меньшей мере двумя оптическими излучающими устройствами, различны, причем оптическое приемное устройство выполнено с возможностью приема отраженного света, образованного после того, как излученный свет, излучаемый по меньшей мере одним из оптических излучающих устройств, попадает на препятствие;
при этом излученный свет, излучаемый каждым из оптических излучающих устройств, образует угол θ сходимости с центральной линией оптического приемного устройства и угол сходимости составляет больше 0°;
при этом то оптическое излучающее устройство из двух смежных оптических излучающих устройств, которое находится дальше от оптического приемного устройства, образует первый угол сходимости с центральной линией оптического приемного устройства; причем оптическое излучающее устройство, находящееся ближе к оптическому приемному устройству, образует второй угол сходимости с центральной линией оптического приемного устройства и первый угол сходимости меньше, чем второй угол сходимости.
2. Самодвижущееся устройство по п. 1, отличающееся тем, что по меньшей мере два оптических излучающих устройства расположены с одной и той же стороны оптического приемного устройства.
3. Самодвижущееся устройство по п. 1, отличающееся тем, что направления излученного света, излучаемого по меньшей мере двумя оптическими излучающими устройствами, отклонены в направлении центральной линии оптического приемного устройства.
4. Самодвижущееся устройство по любому из пп. 1, 2 или 3, отличающееся тем, что по меньшей мере два оптических излучающих устройства и оптическое приемное устройство расположены в ряд.
5. Самодвижущееся устройство по п. 1, отличающееся тем, что диапазон обнаружения оптического приемного устройства и оптических излучающих устройств не превышает 2 см.
6. Самодвижущееся устройство по п. 1, отличающееся тем, что по меньшей мере два оптических излучающих устройства и оптическое приемное устройство встроены в один оптический модуль.
7. Самодвижущееся устройство по п. 1, отличающееся тем, что оптическое приемное устройство и по меньшей мере два оптических излучающих устройства выполнены с возможностью обнаружения краев самодвижущегося устройства.
8. Самодвижущееся устройство по п. 1, отличающееся тем, что после получения отраженного света оптическое приемное устройство преобразует отраженный свет в сигнал приема света и передает сигнал приема света в систему управления; и
система управления выполнена с возможностью определения расстояния между самодвижущимся устройством и препятствием согласно сигналу приема света.
| CN 103941307 A, 23.07.2014 | |||
| US 4659922 A, 21.04.1987 | |||
| CN 107045352 A, 15.08.2017 | |||
| CN 102645654 A, 22.08.2012 | |||
| CN 105404298 A, 16.03.2016 | |||
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710453C1 |

