Изобретение относится к контрольно-измерительной технике и предназначено для измерения заданной величины, поступающей, например, в виде электрического сигнала.
В практике испытаний парашютных систем одним из основных критериев функционирования является скорость снижения объекта, оснащенного парашютом, в установившемся режиме, при этом важной задачей также является определение скорости, при которой произошел ввод парашюта.
Известна автономная информационно-измерительная система по патенту RU 109567 от 13.01.2011, используемая, в частности, для измерения и регистрации нагрузок, действующих на манекен летчика при катапультировании, содержащая блоки согласующих устройств сигналов измерительных преобразователей, аналоговый коммутатор каналов, аналого-цифровой преобразователь, перепрограммируемый микропроцессор и энергонезависимую память.
Эта система размещается внутри манекена летчика, в момент катапультирования манекен вылетает вместе с катапультным креслом из самолета, затем после разделения с креслом спускается на парашюте на землю.
Существенным недостатком известной системы является используемый в ней способ регистрации, имеющий ограниченные возможности по настройке частоты опроса и типа запуска, что может приводить к возможной потере полезной информации о работе объекта испытаний, например, в ситуациях нештатного срабатывания парашютных систем. При этом отсутствуют способы дополнительной адаптации для применения в нестандартной конфигурации, в частности для испытаний парашютных систем.
Как показала эксплуатация известной системы, в ряде случаев ее возможности не позволяют выполнить поставленные задачи регистрации скорости снижения объекта испытаний либо по причине недостатка объема входных данных, либо вследствие вычислительных причин - ошибок округления, интегрирования.
Задачей изобретения является создание контрольно-записывающей аппаратуры для летных испытаний парашютных систем с таким ее конструктивным исполнением, которое обеспечит получение значений координат и скорости движения объекта испытаний, а также величин динамических нагрузок, воздействующих на объект испытаний на всех этапах работы парашютной системы с возможностью адаптивной настройки частоты опроса измерительных каналов в течение всего времени регистрации.
Поставленная задача решается за счет введения в состав аппаратуры блока определения координат и измерения динамических нагрузок, выход которого подключен к перепрограммируемому микропроцессору, причем перепрограммируемый микропроцессор дополнительно оснащен входом для ввода данных от блока определения координат и измерения динамических нагрузок. В перепрограммируемый микропроцессор дополнительно введены программные функции, позволяющие гибко управлять работой измерительных каналов, порядком и частотой их опроса. Также перепрограммируемый микропроцессор дополнительно оснащен выходом для вывода значений координат, скорости и ускорении объекта испытаний, не требующих дополнительной обработки в программном модуле обработки, выполняемом на персональном компьютере, и готовых для ввода в программный модуль анализа и представления, выполняемый на персональном компьютере, для чего программный модуль анализа и представления дополнительно оснащен входом для получения этих данных.
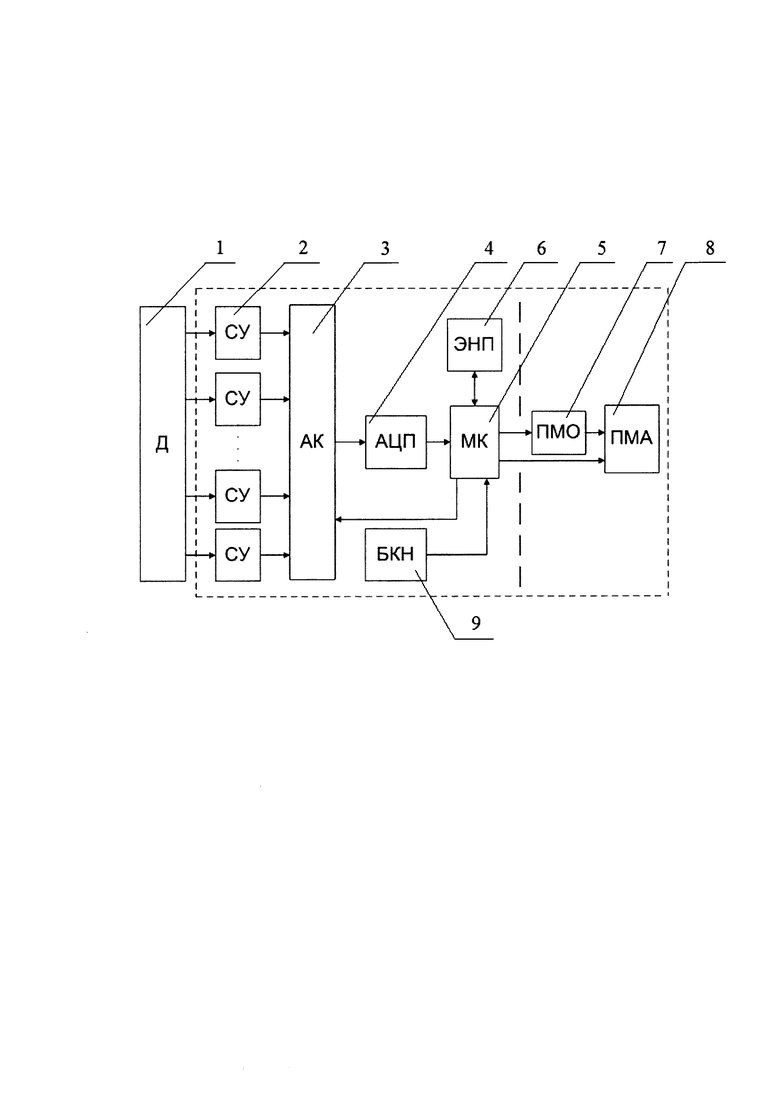
На фигуре представлена структурная схема заявляемой контрольно-записывающей аппаратуры для летных испытаний парашютных систем, которая состоит из блоков согласующих устройств 2, аналогового коммутатора 3, аналого-цифрового преобразователя 4, перепрограммируемого микропроцессора 5, энергонезависимой памяти 6 и блока определения координат и измерения динамических нагрузок 9. Программный модуль обработки 7 и программный модуль анализа и представления 8 выполняются на персональном компьютере, не входящем в состав заявляемой системы, причем в программный модуль анализа и представления 8 введены функции получения данных от перепрограммируемого микропроцессора 5.
Заявляемая контрольно-записывающая аппаратура для летных испытаний парашютных систем работает следующим образом.
Информационные сигналы от датчиков 1, не входящих в состав заявляемой аппаратуры, через блоки согласующих устройств 2 поступают на аналоговый коммутатор 3, выход которого подключен к аналого-цифровому преобразователю 4.
Перепрограммируемый микропроцессор 5, работающий в соответствии с внутренним алгоритмом работы, управляет аналоговым коммутатором 3 и выполняет чтение цифровых данных с выхода аналого-цифрового преобразователя 4 с заданной частотой, причем в случае изменения характера входного сигнала (например, резкого изменения его амплитуды) перепрограммируемый микропроцессор 5 адаптивно изменяет частоту опроса аналого-цифрового преобразователя 4, тем самым, с одной стороны, исключая потерю важной информации (для процессов с резким изменением амплитуды сигнала), и, с другой стороны, оптимизируя объем хранимых данных (для процессов с малыми изменениями амплитуды сигнала).
Также перепрограммируемый микропроцессор 5 обеспечивает ввод и регистрацию данных от блока определения координат и измерения динамических нагрузок 9, который выполняет непрерывное вычисление координат и скорости движения посредством приема сигнала от систем глобального позиционирования, не входящих в состав заявляемой аппаратуры, и сигналов от датчиков линейных ускорений и угловых скоростей, входящих в состав блока измерения динамических нагрузок 9.
Также блок определения координат и измерения динамических нагрузок 9 дополнительно выполняет функцию измерения линейных ускорений и угловых скоростей движения по трем ортогональным осям с целью анализа динамических нагрузок, прикладываемых к объекту испытаний.
Блок определения координат и измерения динамических нагрузок 9 не требует дополнительной периодической настройки.
Перепрограммируемый микропроцессор 5 дополняет все полученные данные текущей отметкой времени и записывает их в энергонезависимую память 6.
Также перепрограммируемый микропроцессор 5 поддерживает различные способы запуска регистрации - по внутреннему таймеру, по внешнему событию (например, срабатыванию концевого выключателя, размещенного на объекте испытаний), а также по логической комбинации состояний сигналов для одного или группы каналов, а также по амплитудным или временным порогам, служащим в качестве признаков запуска регистрации.
После окончания регистрации данные, сохраненные в энергонезависимой памяти 6, могут быть в дальнейшем считаны и перенесены в долговременную память персонального компьютера. Персональный компьютер, не входящий в состав заявляемой системы, выполняет подготовку и визуализацию полученных данных с помощью специализированных программных средств, включающих в себя программный модуль обработки 7 и программный модуль анализа и представления 8, при этом данные, полученные от блока определения координат и измерения динамических нагрузок 9, не требуют дополнительной обработки в программном модуле обработки 7, они передаются непосредственно в программный модуль анализа и представления 8.
Таким образом, решается задача создания контрольно-записывающей аппаратуры для летных испытаний парашютных систем с таким ее конструктивным исполнением, которое обеспечивает получение значений координат и скорости движения объекта испытаний, а также величин динамических нагрузок, воздействующих на объект испытаний на всех этапах работы парашютной системы с возможностью адаптивной настройки частоты опроса измерительных каналов в течение всего времени регистрации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОГАБАРИТНАЯ СИСТЕМА СБОРА И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2011 |
|
RU2454713C1 |
| МАЛОГАБАРИТНАЯ СИСТЕМА СБОРА И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2012 |
|
RU2558610C2 |
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 2009 |
|
RU2427802C1 |
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 2012 |
|
RU2497082C1 |
| Сейсмический прибор для измерения динамических воздействий при мониторинге технического состояния несущих конструкций зданий и сооружений | 2017 |
|
RU2655462C1 |
| ПЕРЕНОСНОЙ ПРОГРАММНО-ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2363975C2 |
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 2010 |
|
RU2423671C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ МОСТОВЫХ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2240551C2 |
| АВТОНОМНЫЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ | 2013 |
|
RU2576595C2 |
| ПЕРЕНОСНОЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2340926C1 |
Контрольно-записывающая аппаратура для летных испытаний парашютных систем состоит из блоков согласующих устройств, аналогового коммутатора каналов, аналого-цифрового преобразователя, перепрограммируемого микропроцессора, энергонезависимой памяти, блока определения координат и измерения динамических нагрузок, перепрограммируемый микропроцессор оснащен входом для ввода данных от блока определения координат и измерения динамических нагрузок и выходом для вывода данных о координатах, скорости и ускорении объекта испытаний, при этом программные функции микропроцессора позволяют гибко управлять порядком и частотой опроса измерительных каналов. Техническим результатом при реализации заявленного решения является создание контрольно-записывающей аппаратуры для летных испытаний парашютных систем с таким ее конструктивным исполнением, которое обеспечит получение значений координат и скорости движения объекта испытаний, а также величин динамических нагрузок, воздействующих на объект испытаний на всех этапах работы парашютной системы с возможностью адаптивной настройки частоты опроса измерительных каналов в течение всего времени регистрации. 1 ил.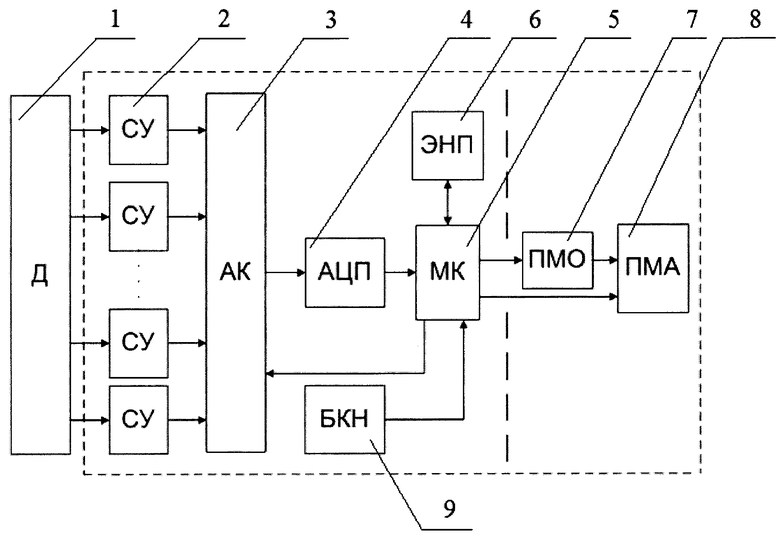
Контрольно-записывающая аппаратура для летных испытаний парашютных систем, состоящая из блоков согласующих устройств, аналогового коммутатора каналов, аналого-цифрового преобразователя, перепрограммируемого микропроцессора, энергонезависимой памяти, отличающаяся тем, что в состав аппаратуры дополнительно введен блок определения координат и измерения динамических нагрузок, а перепрограммируемый микропроцессор дополнительно оснащен входом для ввода данных от блока определения координат и измерения динамических нагрузок и выходом для вывода данных о координатах, скорости и ускорении объекта испытаний, при этом программные функции микропроцессора позволяют гибко управлять порядком и частотой опроса измерительных каналов.
| Сепаратор-пеногаситель для масла | 1953 |
|
SU109567A1 |
| УСТРОЙСТВО СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ | 2007 |
|
RU2349878C1 |
| СИСТЕМА РЕГИСТРАЦИИ СИГНАЛОВ ЭЛЕКТРОМАГНИТНЫХ УСТРОЙСТВ | 2012 |
|
RU2515962C1 |
| US 7271713 B2,18.09.2007 | |||
| CN 110764432 B, 02.10.2022. | |||

