Перекрестная ссылка на родственную патентную заявку
Для настоящей заявки испрашивается приоритет по предварительной патентной заявке США с серийным номером 62/911,558, поданной 7 октября 2019 г., содержание которой полностью включено в настоящую заявку посредством ссылки.
Область техники
Изобретение относится к машинам для укладки волокон и, в частности, к головке для укладки волокон, которая способна перемещаться вдоль оси W и применяется вместе с машиной для укладки волокон.
Предшествующий уровень техники
Машины для укладки волокон используются для создания композиционных заготовок. Композиционный материал в виде волокнистого материала, пропитанного смолой, укладывается машинами в форму или на оправку в точно заданные места с точными длинами для совместного формирования композиционной заготовки. Машина для укладки волокон перемещает головку для укладки волокон относительно формы для точного укладывания композиционной ленты и получения окончательного профиля композиционной заготовки. Когда головка для укладки волокон перемещается, она оставляет сзади на форме множество сегментов композиционной ленты, также называемых рядами или жгутами. Автоматическая укладка этих сегментов композиционных лент в форму предусматривает взаимодействие различных механизмов, которые удерживают, перемещают и, в конечном счете, разрезают композиционную ленту.
Машины для укладки волокон могут содержать механизм, который перемещает головку для укладки волокон относительно множества осей, устанавливая указанную головку в точное положение для наложения композиционной ленты на форму. Когда машина для укладки волокон накладывает композиционную ленту на форму, механизм перемещает всю головку по траектории в поперечном направлении формы. Головка для размещения волокон может включать в себя ряд элементов, которые имеют значительную массу, таких как шпули композиционной ленты, которые подают материал, используемый для сегментов композиционной ленты. Механизм, перемещающий головку для укладки волокон точно по траектории наложения сегмента композиционной ленты на форму, потребляет много энергии. Механизм испытывает значительную нагрузку, преодолевая инерцию при приведении в движение или при точной остановке головки для укладки волокон, имеющей большую массу. При укладке большого количества слоев укороченных сегментов композиционной ленты нагрузка на указанный механизм возрастает.
Раскрытие изобретения
Согласно одному из вариантов осуществления изобретения головка для укладки волокон для наложения множества сегментов композиционной ленты на форму содержит раму, подающую композиционную ленту для наложения на форму и приспособленную для разъемного соединения с роботом-манипулятором; лентоукладочный узел, который с возможностью скольжения поддерживается рамой и накладывает сегменты композиционной ленты на форму, при этом лентоукладочный узел перемещается линейно от одного конца рамы по направлению к другому концу рамы вдоль оси W.
Согласно другому варианту осуществления изобретения головка для укладки волокон для наложения множества сегментов композиционной ленты на форму содержит раму, подающую композиционную ленту для наложения на форму; лентоукладочный узел, который с возможностью скольжения поддерживается рамой вдоль направляющих рамы и накладывает сегменты композиционной ленты на форму, причем головка для укладки волокон перемещается по линейной траектории, а лентоукладочный узел перемещается вдоль оси W, которая не параллельна линейной траектории наложения сегментов композиционной ленты на форму.
Краткое описание чертежей
На фиг. 1 показана машина для укладки волокон согласно варианту осуществления, вид в перспективе;
на фиг. 2 - головка для укладки волокон согласно варианту осуществления, другой вид в перспективе;
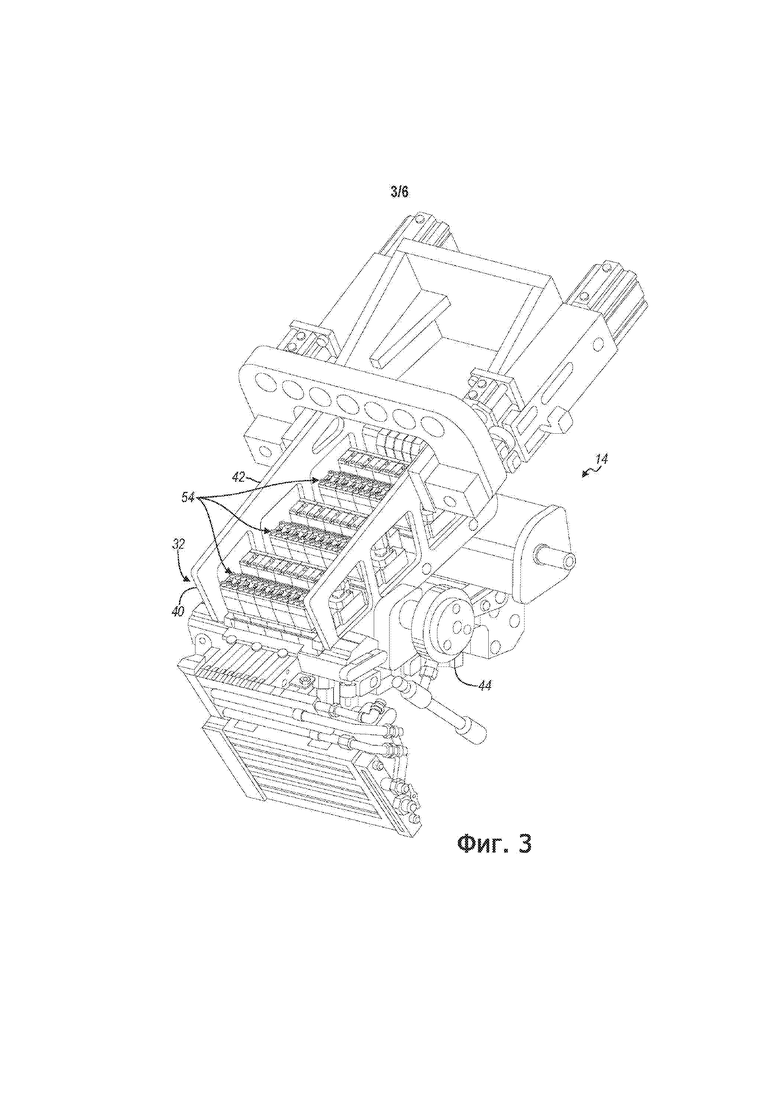
на фиг. 3 - часть головки для укладки волокон согласно варианту осуществления, вид в перспективе;
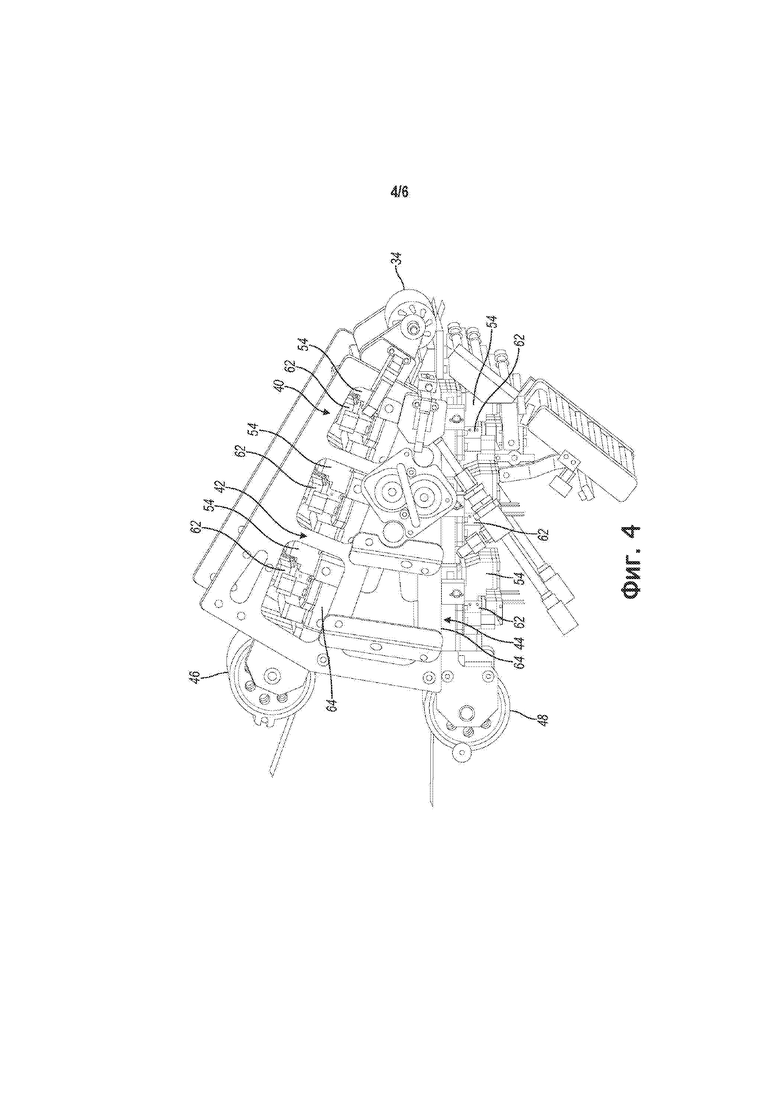
на фиг. 4 - часть головки для укладки волокон согласно варианту осуществления, другой вид в перспективе;
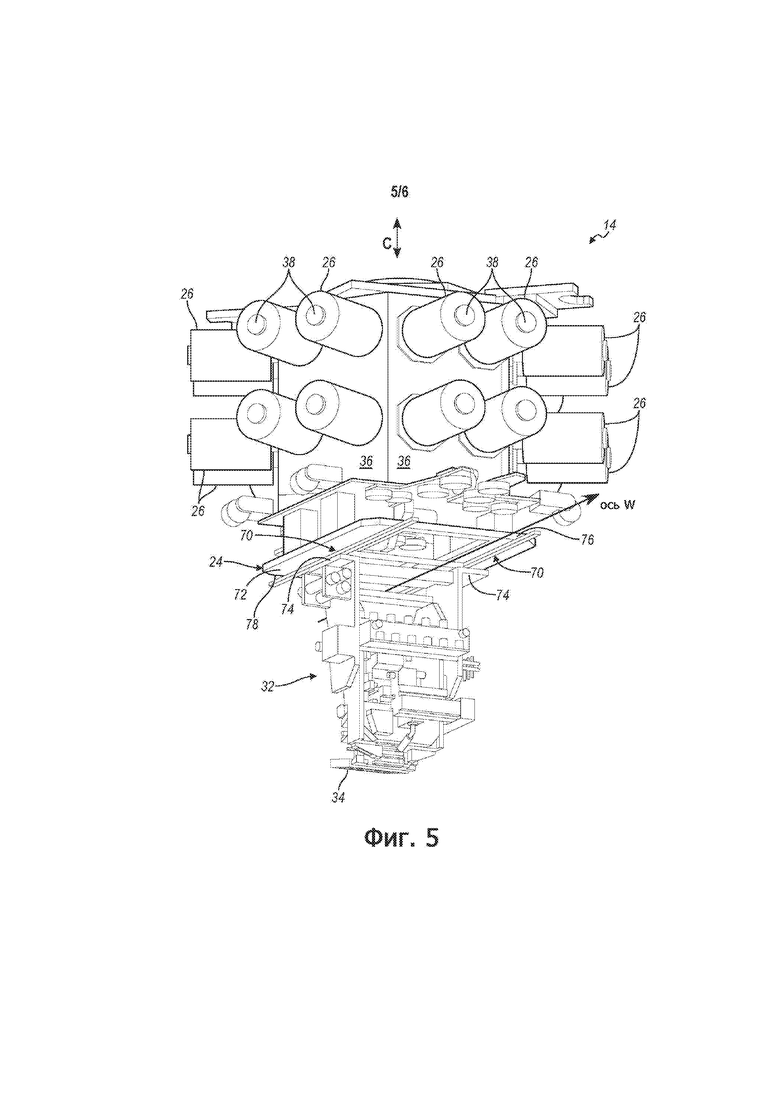
на фиг. 5 - головка для укладки волокон согласно варианту осуществления, другой вид в перспективе;
на фиг. 6А - робот-манипулятор, перемещающий головку для укладки волокон, согласно варианту осуществления, вид сверху;
на фиг. 6В - робот-манипулятор, перемещающий головку для укладки волокон, согласно другому варианту осуществления, вид сверху.
Варианты осуществления
В машине для укладки волокон может использоваться робот-манипулятор или портальный робот, несущий головку для укладки волокон, имеющую ролик или каретку для наложения, которая перемещается вдоль оси (W) относительно головки для укладки волокон. Узел резки, зажимания и повторного пуска (РЗП-узел), который включает в себя ролик/каретку для наложения, может быть перемещен относительно рамы головки для укладки волокон, которая может удерживаться неподвижно роботом-манипулятором/портальным роботом, в то время как композиционная лента накладывается на форму. Головка для укладки волокон может содержать раму, которая разъемно соединяется с роботом-манипулятором и перемещается в заданное положение относительно формы. Ролик для наложения по мере наложения сегментов композиционной ленты на форму может линейно перемещаться относительно рамы. РЗП-узел может линейно скользить относительно рамы вдоль оси (W), вытягивая при этом композиционную ленту из одной или более шпуль, поддерживаемых рамой. Под действием пружины РЗП-узел, содержащий ролик для наложения, может смещаться вдоль оси (W) в одном направлении. При подготовке к укладке сегментов композиционной ленты на форму РЗП-узел может быть перемещен на один конец доступного диапазона движения против усилия пружины и удерживаться в этом положении. При приближении робота-манипулятора к форме РЗП-узел может быть высвобожден, и под действием пружины РЗП-узел может совершать линейное движение вдоль оси (W), достигая противоположного конца доступного диапазона движения. Головка для укладки волокон может позволить РЗП-узлу достигнуть конца доступного диапазона движения или головка может остановить РЗП-узел вдоль оси W. Перемещение головки для укладки волокон только по одной линейной оси позволяет наложить на форму множество сегментов композиционной ленты. В машинах известного уровня техники наложение сегментов композиционной ленты осуществляется при перемещении головки для укладки волокон по нескольким осям.
На фиг. 1 показан вариант выполнения машины 10 для укладки волокон. Машина 10 для укладки волокон содержит робот-манипулятор 12, который соединен с возможностью отсоединения с головкой 14 для укладки волокон. Робот-манипулятор может поддерживаться основанием 16, на котором он линейно перемещается вокруг оси (х). Наружу от основания 16 могут проходить множество подвижных сегментов 18а-18d, которые могут перемещаться посредством поворота, вращения или выдвижения. Робот-манипулятор 12 может перемещаться относительно основания 16 вокруг множества осей. Например, первый сегмент 18а может быть соединен на одном конце с возможностью вращения с основанием 16 так, что робот-манипулятор 12 может вращаться вокруг основания 16. Второй сегмент 18b может быть соединен с возможностью поворота с первым сегментом 18а, а третий сегмент 18с может быть соединен с возможностью поворота со вторым сегментом. Четвертый сегмент 18d может быть соединен с третьим сегментом 18с и телескопически перемещаться от третьего сегмента и к нему. Сегменты 18а-18d могут перемещаться относительно друг друга с помощью гидравлических цилиндров, электродвигателей или какой-либо комбинации этих или других приводных элементов с целью перемещения дальнего конца робота-манипулятора 12 относительно формы 20 или оправки, используемых для создания заготовки.
Для управления перемещением гидравлических цилиндров, электродвигателей или другого приводного элемента, тем самым обеспечивая управление движением и положением подвижных сегментов 18а-18d робота-манипулятора 12, совместно с машиночитаемым носителем данных может использоваться микропроцессор (не показан), получающий выполняемые команды. Микропроцессор может быть устройством любого типа, способным обрабатывать электронные команды, включая сюда микроконтроллеры, главные процессоры, контроллеры и специализированные интегральные микросхемы (ASIC). Он может быть специализированным процессором, используемым только для выполнения управления роботом-манипулятором 12, или может разделять функции других машин. Микропроцессор выполняет хранимые в цифровом виде команды, такие как программа пакета программного обеспечения или микропрограммы, хранящиеся в запоминающем устройстве. Связи между механизмом, который перемещает робот-манипулятор, например, гидравлическими цилиндрами или электродвигателями, и микропроцессором, могут выполняться с помощью коммуникационной шины.
Робот-манипулятор 12 может перемещать головку 14 для укладки волокон по четырем осям для позиционирования головки 14 с целью обслуживания или укладки композиционной ленты в форму 20. Помимо того, что это является одним вариантом выполнения робота-манипулятора 12, который может использоваться с головкой для укладки волокон, также может использоваться другой вариант выполнения роботов-манипуляторов или механических устройств, которые укладывают композиционную ленту. Например, головка 14 для укладки волокон может применяться с четырехосным портальным роботом, обеспечивающим перемещение головки 14 по осям (х), (у) и (z) и вращение рамы 24 головки вокруг оси (С). Композиционная лента может относиться к полимерному материалу, армированному углеродным волокном (CFRP), который содержит смолу, подвергаемую отверждению, в неотвержденном состоянии. Указанный полимерный материал можно назвать «препрегом» и он может содержать как углеродные волокна, так и другие материалы. Отверждение композиционного материала осуществляется под действием нагревания.
Дальний конец робота-манипулятора 12 от основания 16 может содержать зажимной патрон 22, который входит в зацепление с возможностью освобождения с головкой 14 для укладки волокон. Зажимной патрон 22 и часть головки 14 для укладки волокон могут иметь соответствующие элементы такие, чтобы зажимной патрон 22 мог захватывать с возможностью освобождения головку 14 для укладки волокон. Согласно варианту выполнения головка 14 для укладки волокон содержит цилиндрический хвостовик, проходящий перпендикулярно поверхности головки 14. Робот-манипулятор 12 может позиционировать зажимной патрон 22 так, чтобы он входил в зацепление с хвостовиком, и головка 14 для укладки волокон упруго соединялась с роботом-манипулятором 12.
Как показано на фиг. 2-4, головка 14 для укладки волокон может содержать раму 24, имеющую множество наружных поверхностей 36 и установленные перпендикулярно относительно них шпиндели 38, на которых установлены шпули 26, несущие композиционную ленту в качестве источника этой ленты для головки 14, и лентоукладочный узел. Рама 24 посредством шпуль 26 подает композиционную ленту для накладывания на форму 20. Согласно указанному варианту осуществления изобретения, лентоукладочный узел может быть реализован в виде узла 32 резки, зажимания и повторного пуска (РЗП-узла). РЗП-узел 32 может содержать уплотнительный ролик 34 (или уплотнительную каретку), который может принимать композиционную ленту со шпуль 26 и укладывать ее в форму 20 для создания композиционной детали. Шпиндели 38 могут перемещаться для создания натяжения ленты, используя натяжные элементы, которые имеют пневматическое, механическое или гидравлическое управление и способствуют поддерживанию натяжения композиционной ленты, когда ленту укладывают в форму 20. Композиционная лента может разматываться со шпуль 26 и подаваться в уплотнительный ролик 34 для окончательной укладки в форму 20. РЗП-узел 32 может скользить относительно рамы 24 вдоль оси W. Подробное описание следует далее.
Головка 14 для укладки волокон может содержать РЗП-раму 40 для поддерживания компонентов головки 14 для укладки волокон, РЗП-узел 32 и уплотнительный ролик 34, который, в конечном счете, прижимает ряд композиционных лент к форме 20. Перед достижением уплотнительного ролика 34 часть композиционных лент может проходить через верхнюю часть 42 подачи, а другая часть композиционных лент может проходить через нижнюю часть 44 подачи. Верхняя часть 42 подачи может обрабатывать четные композиционные ленты, а нижняя часть 44 подачи может обрабатывать нечетные композиционные ленты, которые встречаются у уплотнительного ролика 34. Например, для головки 14 для укладки волокон, имеющей восемь путей или дорожек, верхняя часть 42 подачи может обрабатывать композиционную ленту, идентифицированную номерами 2, 4, 6 и 8, в то время как нижняя часть 44 подачи может обрабатывать композиционную ленту, идентифицированную номерами 1, 3, 5 и 7. Верхняя часть 42 подачи и нижняя часть 44 подачи могут быть отделены углом. Верхний подающий ролик 46 и нижний подающий ролик 48 могут передавать композиционную ленту со шпуль 26 к верхней части 42 подачи и нижней части 44 подачи, соответственно. С верхней частью 42 подачи и нижней частью 44 подачи может быть связано множество модулей 54 дорожек.
Каждая из верхней части 42 подачи и нижней части 44 подачи может содержать коллектор 64 для приема множества опорных оснований, в которых может быть принято с возможностью освобождения множество модулей 54 дорожек. Электромеханические клапаны 62 установлены на модулях 54 дорожек и могут соединяться с опорой посредством заднего воздушного блока. Каждый модуль 54 дорожки может упираться в электромагнитный клапан 62 так, что клапан 62 избирательно подает сжатый воздух в модуль 54 для приведения в действие. Опорное основание может быть соединено с коллектором 64, а сжатый воздух от источника, проходя по каналам для текучей среды через задний воздушный блок и электромеханические клапаны 62, в конечном счете, поступает к модулям 54 дорожек, присоединенным к опорному основанию. Сжатый воздух может выборочно подаваться в модуль 54 дорожки с помощью электромагнитного клапана 62, что обеспечивает сообщение воздуха из коллектора 64 и заднего воздушного блока. Согласно варианту выполнения электромагнитный клапан 62 содержит соленоид, принимающий напряжение, регулируемое с помощью переключателя микропроцессора, который включается и выключается для управления приведением в действие модуля 54 дорожки.
На фиг. 5 показана головка 14 для укладки волокон, имеющая раму 24 и РЗП-узел 32, который скользит линейно вдоль оси W относительно рамы 24. Рама 24 может содержать направляющие 70 на поверхности 72 рамы, противоположной зажимному патрону 22, который разъемно сцепляется с головкой 14 для укладки волокон. Поверхность 72 рамы может быть обращена к форме 20, на которую головка 14 для укладки волокон накладывает сегменты композиционной ленты. РЗП-узел 32 может содержать РЗП-направляющие 74, которые согласуются с направляющими 70 рамы и взаимодействуют с ними. Направляющие 70 рамы и РЗП-направляющие 74 могут иметь L-образное поперечное сечение, в результате чего, РЗП-направляющие 74 взаимодействуют с направляющими 70 рамы и служат опорой для РЗП-узла 32 на раме 24. Помимо опоры, направляющие 70, 74 позволяют перемещать РЗП-узел 32 относительно рамы 24 вдоль оси W. Ось W может быть смещена под углом относительно осей (х), (у) и (z), когда головка 14 для укладки волокон поворачивается относительно робота-манипулятора 12 вокруг оси (С). РЗП-узел 32 и уплотняющий ролик 34 могут быть смещены под углом относительно оси (х), оси (у) или оси (z) приблизительно на 90°, что позволяет наносить композиционную ленту на форму 20 под разными углами по мере перемещения РЗП-узла 32 вдоль оси W.
Пружина (не показана) может смещать РЗП-узел 32 по направлению к первому концу 76 рамы 24. Перед нанесением очередного сегмента композиционной ленты на форму 20 РЗП-узел 32 может перемещаться ко второму концу 78 рамы 24, преодолевая усилие пружины. РЗП-узел 32 во время перемещения от первого конца 76 ко второму концу 78, вытягивает из шпуль 26 композиционную ленту, при этом РЗП-узел 32 подготавливается для наложения одного или более сегментов композиционной ленты. РЗП-узел 32 может удерживаться в требуемом положении на втором конце 78. Робот-манипулятор 12 может перемещать РЗП-узел 32 вдоль формы 20 так, чтобы уплотняющий ролик 34 располагался на одном крае формы 20. РЗП-узел 32 может быть высвобожден, и пружина может перемещать РЗП-узел 32 вдоль оси W. Когда РЗП-узел 32 перемещается относительно рамы 24, уплотняющий ролик 34 накладывает композиционную ленту на форму 20. После того, как РЗП-узел 32 достигнет первого конца 76, робот-манипулятор 12 может перемещать РЗП-узел 32 относительно формы 20 вдоль оси (у). РЗП-узел 32 может перемещаться к первому концу 76 или может быть остановлен в любой точке вдоль оси W между первым концом 76 и вторым концом 78. Затем процесс перезапускается для дополнительного наложения композиционной ленты на форму 20.
На фиг. 6а-6b показано перемещение головки для укладки волокон относительно формы или оправки, на которую накладываются секции композитной ленты, различные виды сверху. На фиг. 6а показана головка 14 для укладки волокон, движущаяся по зигзагообразной траектории 80, когда робот-манипулятор 12 накладывает композиционную ленту на форму 20 без перемещения РЗП-узла 32 вдоль оси W. Робот-манипулятор 12 перемещает головку 14 для укладки волокон относительно осей (х) и (у) без перемещения РЗП-узла 32 вдоль оси W. Таким образом, робот-манипулятор 12 перемещает головку 14 для укладки волокон по всей траектории наложения композиционной ленты на форму 20. В противоположность этому, на фиг. 6b показана головка 14 для укладки волокон, которая перемещается по линейной траектории 82. Согласно указанному варианту осуществления изобретения по траектории наложения композиционной ленты на форму 20 перемещается только РЗП-узел 32, в то время как головка 14 для укладки волокон остается неподвижной. Робот-манипулятор 12 может расположить головку 14 для укладки волокон вблизи края 84 формы 20. РЗП-узел 32 может быть высвобожден и пружина может перемещать РЗП-узел 32 вдоль оси W и в поперечном направлении формы 20 до тех пор, пока на форму 20 не будет наложено заданное количество композиционной ленты. РЗП-узел 32 может быть перемещен на первый конец 76, либо РЗП-узел 32 может быть остановлен до достижения первого конца 76. После остановки РЗП-узла 32 робот-манипулятор 12 может переместить головку 14 для укладки волокон по линейной траектории 82 в следующее положение 86 вдоль края 84, чтобы на форму 20 можно было нанести дополнительный сегмент композиционной ленты. Указанный процесс может перезапускаться многократно в зависимости от количества наносимых на форму 20 сегментов композиционной ленты.
Следует принять во внимание, что вышеприведенное описание относится к одному или более вариантам осуществления изобретения. Изобретение не ограничивается до конкретного раскрытого варианта (конкретных вариантов) и определяется исключительно формулой изобретения. Кроме того, утверждения, содержащиеся в вышеприведенном описании, относятся к конкретным вариантам осуществления и не должны толковаться как ограничения объема изобретения или определения понятий, используемых в формуле изобретения, за исключением случаев, когда понятие или выражение в явной форме определено выше. Ряд других вариантов осуществления и ряд изменений и модификаций раскрытого варианта (вариантов) осуществления будут понятными специалистам в этой области. Предусмотрено, что все иные подобные варианты осуществления, изменения и модификации соответствуют объему формулы изобретения.
Используемые понятия «напр.», «например», «такой как» и «подобный» и глаголы «содержать», «иметь», «включать» и другие формы глагола при использовании совместно с перечислением одного или более компонентов или других элементов должны толковаться как неограниченные, означая, что перечень не должен рассматриваться как исключающий другие дополнительные компоненты и элементы. Другие понятия должны рассматриваться, используя их самое широкое приемлемое значение, если они не используются в контексте, который требует иного толкования.



Изобретение относится к головке для укладки волокон. Техническим результатом является снижение нагрузки на механизм укладки волокон. Технический результат достигается головкой для укладки волокон для наложения множества сегментов композиционной ленты на форму. Головка содержит раму, которая подает композиционную ленту для накладывания на форму и выполнена с возможностью разъемного соединения с роботом-манипулятором. Ролик или каретку для наложения волокон, которая с возможностью скольжения поддерживается рамой и накладывает сегменты композиционной ленты на форму. При этом ролик или каретка для наложения волокон перемещается линейно от одного конца рамы к другому концу рамы вдоль оси (W). 2 н. и 10 з.п. ф-лы, 7 ил.
1. Головка для укладки волокон для наложения множества сегментов композиционной ленты на форму, содержащая:
раму, которая подает композиционную ленту для накладывания на форму и выполнена с возможностью разъемного соединения с роботом-манипулятором;
ролик или каретку для наложения волокон, которая с возможностью скольжения поддерживается рамой и накладывает сегменты композиционной ленты на форму, при этом ролик или каретка для наложения волокон перемещается линейно от одного конца рамы к другому концу рамы вдоль оси (W).
2. Головка для укладки волокон по п. 1, дополнительно содержащая узел резки, зажимания и повторного пуска.
3. Головка для укладки волокон по п. 1, дополнительно содержащая хвостовик, выполненный с возможностью сцепления с зажимным патроном, расположенным на дальнем конце робота-манипулятора.
4. Головка для укладки волокон по п. 1, дополнительно содержащая пружину, которая смещает ролик или каретку для наложения волокон по направлению к одному концу рамы или другому концу рамы.
5. Головка укладки волокон по п. 1, в которой ролик или каретка для наложения волокон перемещается линейно от одного конца рамы к другому концу рамы вдоль оси W, при этом головка для укладки волокон остается неподвижной.
6. Головка для укладки волокон по п. 1, в которой робот-манипулятор вращает раму вокруг оси (С).
7. Головка для укладки волокон для наложения множества сегментов композиционной ленты на форму, содержащая:
раму, подающую композиционную ленту для наложения на форму;
ролик или каретку для наложения волокон, которая с возможностью скольжения поддерживается рамой вдоль направляющих рамы и накладывает сегменты композиционной ленты на форму, причем головка для укладки волокон перемещается по линейной траектории, а ролик или каретка для наложения волокон перемещается вдоль оси (W), которая не параллельна линейной траектории наложения сегментов композиционной ленты на форму.
8. Головка для укладки волокон по п. 7, в которой ролик или каретка для наложения волокон дополнительно содержит узел резки, зажимания и повторного пуска.
9. Головка для укладки волокон по п. 7, дополнительно содержащая робот-манипулятор, который разъемно соединяется с головкой для укладки волокон для перемещения головки для укладки волокон относительно формы.
10. Головка для укладки волокон по п. 9, в которой робот-манипулятор вращает раму вокруг оси (С).
11. Головка для укладки волокон по п. 7, дополнительно содержащая пружину, которая смещает ролик или каретку для наложения волокон к концу рамы.
12. Головка для укладки волокон по п. 7, в которой ролик или каретка для наложения волокон перемещается линейно от одного конца рамы к другому концу рамы вдоль оси (W), при этом головка для укладки волокон остается неподвижной.
| US 20140238612 А1, 28.08.2014 | |||
| Устройство для укладки волокнистых материалов при изготовлении слоистых изделий | 1984 |
|
SU1274619A3 |
| US 4699683, 13.10.1987 | |||
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДРАПИРОВАНИЯ | 2010 |
|
RU2543174C2 |
| US 20120090788 A1, 19.04.2012 | |||
| US 20080216963 A1, 11.09.2008. | |||

