Данное изобретение относится к усовершенствованной системе безопасности для самоходных рабочих машин.
Более подробно изобретение относится к системе безопасности для фронтальных и поворотных телескопических погрузчиков, которая способна выбирать грузовую диаграмму на основе условий эксплуатации, в которых должна работать машина.
Существуют телескопические погрузчики предшествующего уровня техники, состоящие из транспортного средства, оборудованного рамой, способной перемещаться на колесах, на которой смонтирована кабина водителя и рабочая стрела, которая может выдвигаться телескопически; в поворотных машинах кабина и стрела соединены с платформой, которая поддерживается с возможностью поворота рамой машины.
На дальнем конце стрелы прикрепляется оборудование для подъема или перемещения грузов, такое как, например, вилы, платформа, устройство бокового смещения, подъемник и т.п.
В течение нескольких последних лет телескопические грузоподъемные устройства оснащаются электронными системами обеспечения устойчивости, предотвращающими возникновение условий эксплуатации, которые могут привести к неустойчивости устройства.
В частности, существуют, например, системы обеспечения устойчивости известного уровня техники, которые предотвращают возникновение условий риска продольной неустойчивости.
Исходя из общей конфигурации машины, а также ее размеров, веса и геометрии, можно получить хорошо известную грузовую диаграмму, которая в зависимости от поддерживаемого груза устанавливает пространственную границу, в пределах которой необходимо перемещать стрелу, чтобы заранее предотвратить любой риск неустойчивости.
На практике, основываясь на поднимаемом грузе, система безопасности позволяет или запрещает машине перемещение стрелы, которое запрашивает оператор с помощью органов управления, расположенных в кабине.
Однако операторы в этом секторе в течение некоторого времени ощущали необходимость иметь более гибкие системы безопасности, чем те, которые в настоящее время доступны на рынке.
Фактически системы безопасности предшествующего уровня техники имеют настройку с очень большим запасом.
Например, применительно к платформе определенного типа, предназначенной для перемещения груза до заданного веса, системы безопасности накладывают ограничения на перемещение, которые, с другой стороны, не налагаются на платформы, которые способны перемещать меньшие грузы.
Следствием этого является то, что компании часто имеют множество видов оборудования, в частности различные платформы, такие как, например, платформа для перемещения людей и груза и платформа для перемещения только людей или рабочих инструментов, чтобы таким образом иметь возможность работать со свободой, необходимой для конкретной работы, которую должна выполнять машина.
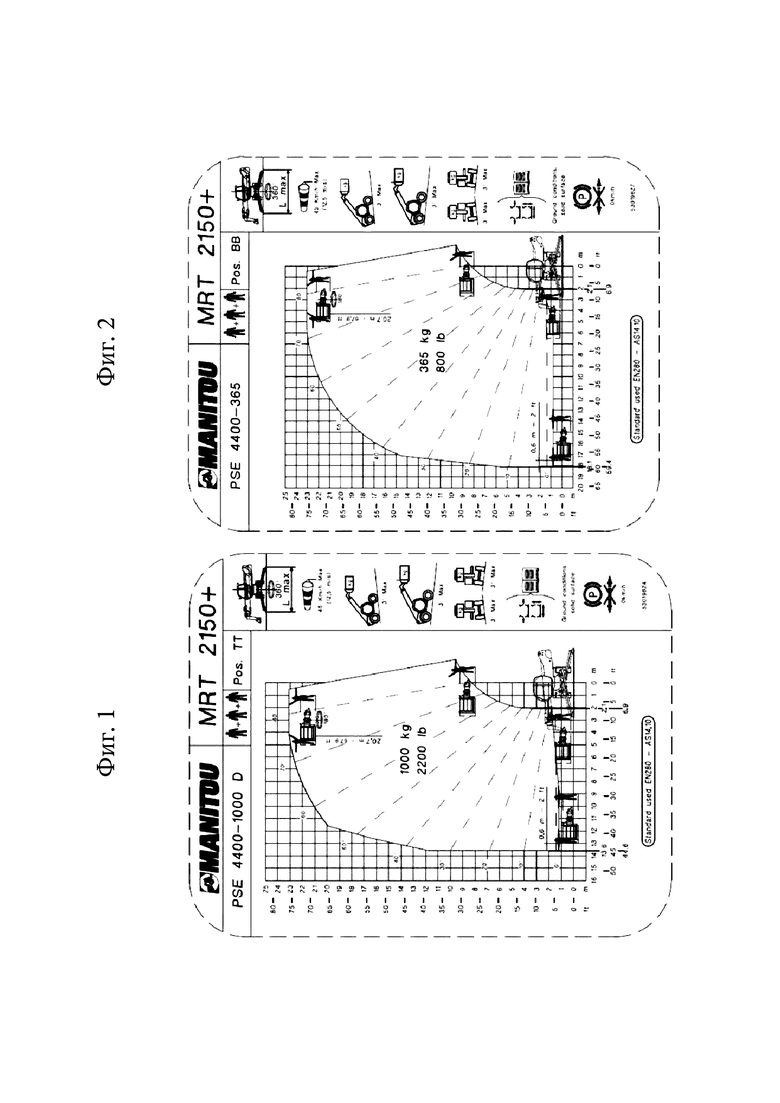
По сути, платформа первого типа подчиняется более строгой диаграмме (см. фиг. 1), которая допускает меньшее выдвижение стрелы, чем вторая платформа, диаграмма которой показана в качестве примера на фиг. 2.
Ограничение систем предшествующего уровня техники касается не только использования платформ, но также относится к множеству видов навесного оборудования, используемого телескопическими погрузчиками.
Например, операторы вынуждены перемещать крановые стрелы, оснащенные двумя или более крюками, расположенными на разных расстояниях и рассчитанными на разные грузы, с одинаковыми ограничениями безопасности, независимо от того, какие крюки используются, как и в случае кран-балок, которые могут выдвигаться лебедкой, при этом движения, разрешенные или запрещенные, являются одинаковыми, независимо от того, выдвинута или убрана кран-балка, и так далее.
Техническая цель изобретения состоит в том, чтобы предложить систему безопасности для самоходных рабочих машин, которая удовлетворяет вышеупомянутой потребности.
Указанная техническая цель достигается системой безопасности, выполненной в соответствии с п. 1 формулы изобретения, способом, выполняемым в соответствии с п. 16 формулы изобретения, и компьютерной программой в соответствии с п. 20 формулы изобретения.
Дополнительные признаки и преимущества изобретения станут более очевидными из неограничивающего описания предпочтительной, но неисключительной формы осуществления предлагаемой системы, как показано на прилагаемых чертежах, на которых:
Фиг. 1 и 2 представляют собой графические представления грузовых диаграмм, связанных с грузовыми платформами, которые могут использоваться телескопическими погрузчиками.
Фиг. 3 представляют собой вид сбоку рабочей машины, которая использует изобретение.
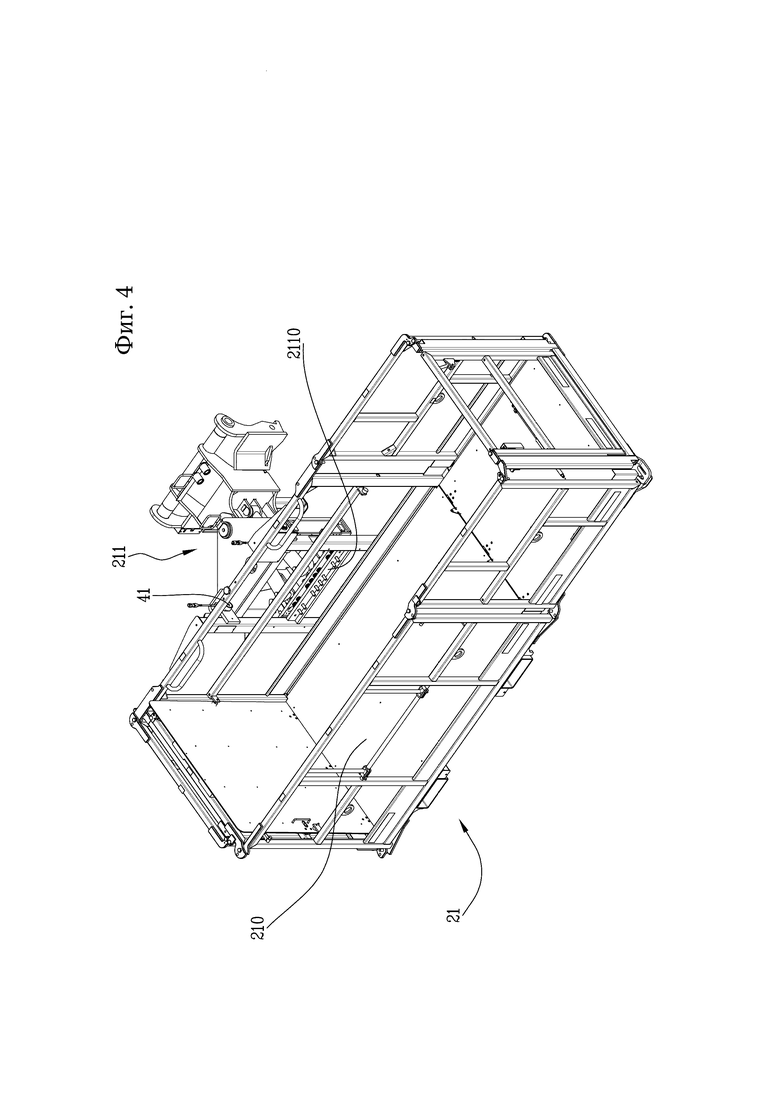
Фиг. 4 представляет собой вид в перспективе платформы, которая может быть использована с настоящим изобретением.
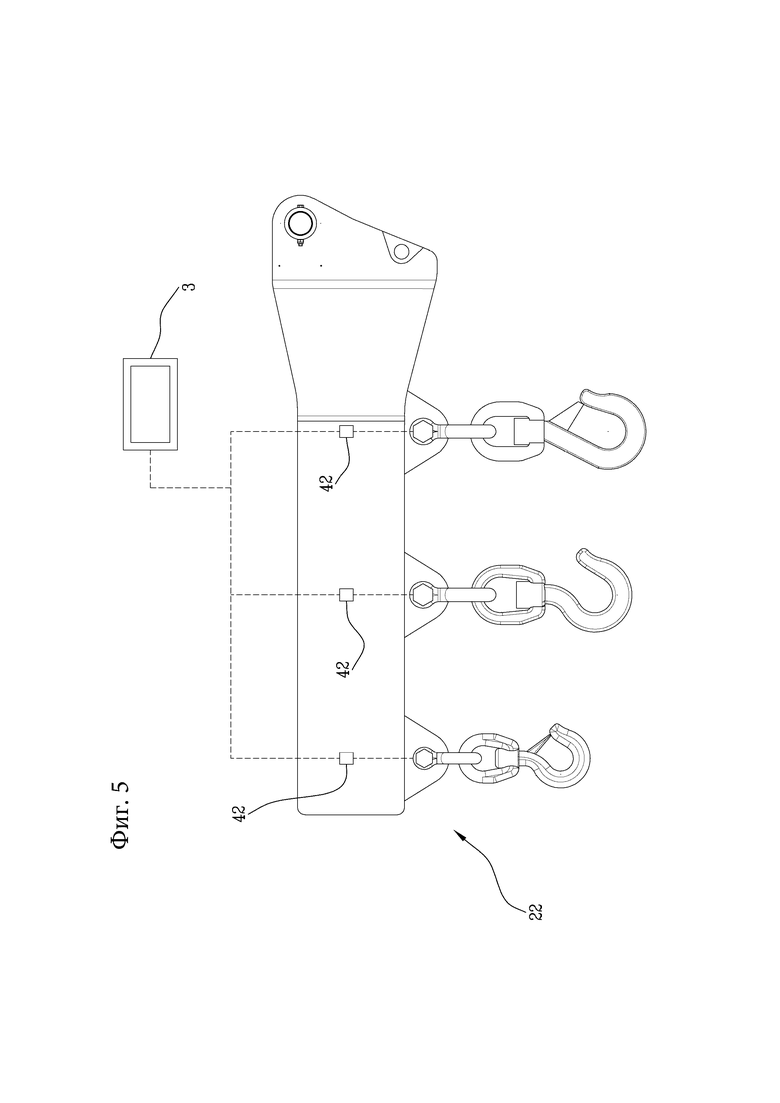
Фиг. 5 представляет собой вид сбоку крановой стрелы с двумя или более крюками, которая может быть использована с настоящим изобретением.
- Фиг. 6 является схемой, представляющей устройство обработки данных в соответствии с изобретением.
Со ссылкой на прилагаемые чертежи, цифра 1 обозначает полностью самоходную рабочую машину, которая оснащена системой безопасности согласно изобретению.
Машина, показанная на чертежах, представляет собой поворотный телескопический погрузчик 1, оборудованный телескопической подъемной стрелой 11, установленной на поворотной платформе 12, которая имеет также кабину 13 водителя, причем стрела оснащена на своем дальнем конце навесным оборудованием 2.
Однако следует отметить, что изобретение может использоваться с другим типом рабочей машины, обычно оснащенной подъемной стрелой и навесным оборудованием.
Например, машина, в которой реализовано изобретение, может представлять собой стационарный телескопический погрузчик или сочлененный телескопический погрузчик или рабочую машину, отличную от телескопических погрузчиков.
Далее для удобства иллюстрации и без ограничения изобретения будет сделана ссылка на конкретный случай, в котором рабочая машина 1 представляет собой телескопический погрузчик.
Термин "оборудование 2" означает как приспособление для захвата груза, такое как вилы, устройство бокового перемещения, лебедка, захват и т.п., так и приспособление для подъема людей и, при необходимости, также груза, такое как платформа.
Более подробно, стрела 11 может иметь на своем дальнем конце крепежное приспособление 110, также такого типа, который обычно используется в телескопических погрузчиках, производимых заявителем, что позволяет осуществлять замену оборудования 2 и его присоединение к гидравлическому и электронному оборудованию машины.
Стрела 11 шарнирно соединена с вращающейся платформой 12, чтобы колебаться вертикально под действием гидравлического цилиндра или аналогичного исполнительного механизма, между нижним положением, по существу, горизонтальным, и верхним положением, в котором стрела 11 находится близко к вертикали.
Стрела 11 является выдвигаемой и втягиваемой и, более точно, содержит множество секций, вставленных одна в другую, соосно друг с другом, и предназначенных для перемещения в осевом направлении.
Выдвижение и втягивание стрелы 11 производятся также одним или несколькими гидравлическими цилиндрами или другими приводами.
Поворот платформы 12 также производится предпочтительно гидравлическим приводом, связанным, например, с рейкой, таким же образом предпочтительно, чтобы привод, который перемещает оборудование относительно одного или нескольких его соединений, был гидравлическим.
Гидравлические приводы подчиняются действию электрогидравлического распределителя 14, смонтированного на машине 1, который управляется посредством органов управления, имеющихся в кабине 13, в соответствии с известными способами.
На практике машина 1 согласно изобретению содержит известную систему управления, снабженную органами управления в кабине 13, такими как джойстик, педали, кнопки и т.п., которые приводятся в действие оператором; воздействием на органы управления генерируются сигналы, принимаемые от распределителя 14, который затем регулирует работу исполнительных механизмов стрелы 11, оборудования 2 и платформы 13 (или других подвижных элементов).
Изобретение также относится к случаю, в котором исполнительные механизмы являются электромеханическими, а не гидравлическими.
Изобретение выполнено в виде усовершенствованной системы безопасности, которая, подобно системам предшествующего уровня техники, описанным во введении, связана с перемещаемыми грузами и предназначена для обеспечения безопасности движений транспортного средства 1; более подробно, система безопасности позволяет перемещать грузы в соответствии с грузовыми диаграммами известного типа и предотвращать возникновение неустойчивости транспортного средства 1, например, продольного типа.
Согласно важному аспекту изобретения, система безопасности содержит блок 3 обработки данных, который включает в себя модуль 31 памяти, где записано множество грузовых диаграмм или, в любом случае, информация или команды, соответствующие множеству грузовых диаграмм.
Блок 3 обработки данных содержит также ограничивающий модуль 32, сконфигурированный для ограничения возможности работы исполнительных механизмов машины 1 на основе грузовой диаграммы, выбранной из грузовых диаграмм в модуле 31 памяти.
Вообще говоря, следует отметить, что в этом описании блок 3 обработки данных представлен как разделенный на отдельные функциональные модули исключительно с целью четкого и полного описания функций.
На практике блок 3 обработки данных может состоять из одного электронного устройства, также такого типа, который обычно присутствует на этом типе машины, соответствующим образом программируемого для выполнения описанных функций; различные модули могут соответствовать аппаратным блокам и/или программным средствам, составляющим часть программируемого устройства.
Альтернативно или в дополнение, функции могут выполняться множеством электронных устройств, по которым могут быть распределены вышеупомянутые функциональные модули.
Вообще говоря, блок 3 обработки данных может иметь один или более микропроцессоров или микроконтроллеров для выполнения команд, содержащихся в модулях памяти, и вышеупомянутые функциональные модули также могут быть распределены по множеству локальных или удаленных калькуляторов на основе архитектуры сети, в которой они размещены.
Предпочтительно, кроме того, предлагаемая система безопасности содержит одно или более измерительных устройств 41 42 для получения рабочих параметров, относящихся к различным условиям эксплуатации рабочей машины 1.
Блок 3 обработки данных содержит также модуль 33 выбора, который сконфигурирован для выбора из модуля 31 памяти конкретной грузовой диаграммы на основе рабочего параметра, получаемого вышеупомянутым измерительным устройством 41, 42, чтобы предоставить модулю 32 ограничения выбранную грузовую диаграмму.
Другими словами, на основе конкретных условий эксплуатации, в которых работает машина 1, на которую была сделана ссылка при обсуждении предшествующего уровня техники, система безопасности будет применять конкретную грузовую диаграмму к движениям машины 1, например, для движений стрелы 11, платформы (или башни) 12 или оборудования 2, тем самым избегая ограничений, налагаемых системами предшествующего уровня техники.
Рабочее состояние может означать конкретный режим использования оборудования 2 или замену оборудования 2 или конкретную форму участка земли, на котором работает машина 1, или новую конфигурацию машины 1 и т.п.
Далее в качестве примера будет сделана ссылка на случай, в котором различные условия эксплуатации состоят из разных способов использования оборудования 2 или его изменения, при этом следует понимать, что общая концепция изобретения также может применяться к другим аспектам.
На практике измерительные устройства согласно изобретению включают в себя или состоят из датчиков 41, 42, которые получают физическую величину, соответствующую рабочему параметру, и передают в блок 3 обработки сигналы, которые являются функцией выполняемого получения.
По этой причине на основе сигнала, принимаемого от датчика или датчиков 41, 42, блок обработки данных выбирает выбираемую грузовую диаграмму и, следовательно, дает команду распределителю 14, который, в свою очередь, управляет исполнительными механизмами, соответствующим образом ограничивая перемещения.
Датчики 41, 42 могут быть разных типов, исходя из оборудования 2 или различных условий эксплуатации, которые предусмотрены изготовителем.
Например, как показано на фиг. 4, может быть грузовая платформа 21, содержащая нижнюю поверхность 210, предназначенную для поддержания операторов и/или их рабочих инструментов и связанную с боковыми стенками, которые расположены по периметру поверхности 210, от которой они отходят, образуя своего рода клеть, открытую сверху.
Платформа 21 оснащена крепежным приспособлением 211, предназначенным для закрепления на крепежном приспособлении 110 стрелы 11 известным способом.
Как показано на фиг. 4, датчики, такие как стержни 41 экстензометра, могут быть помещены между крепежным приспособлением 211 и задней боковой стенкой платформы 21, и/или датчики, например, тензодатчики (не показанные), могут быть расположены на амортизирующей системе 2110, которой оснащено крепежное приспособление 211.
Таким образом, на основе нагрузки, фактически измеренной на платформе 21, система безопасности автоматически выбирает правильную диаграмму, избегая, таким образом, не только операций, которые являются рискованными для устойчивости, но также и чрезмерно строгих ограничений.
Используя систему безопасности в соответствии с изобретением, компании-пользователи могут избежать покупки множества "специализированных" платформ для различных видов деятельности, например, для перевозки только людей или также для перевозки груза, с очевидными преимуществами с точки зрения экономической эффективности и эффективности работы.
Следует отметить, что датчики также могут быть расположены на нижней поверхности 210 платформы 21 или в разных точках на крепежном приспособлении 211 или в других местах.
Обычно датчики 41, 42 могут быть установлены в разных местах на оборудовании 2 или даже также на подъемной стреле 11.
Если оборудование представляет собой крановую стрелу с несколькими крюками 22, такими как показанные на фиг.5, ее различные крюки могут быть функционально связаны с соответствующими измерительными устройствами, такими как датчики 42 нагрузки или другие датчики.
Таким образом, изобретение будет выбирать правильную диаграмму, исходя из крюка, который каждый раз используется для выполнения грузоподъемных операций.
Если оборудование 2 представляет собой выдвижную крановую стрелу с лебедкой, устройство обнаружения может быть датчиком, предназначенным для обнаружения того, находится ли крановая стрела в выдвинутой конфигурации или в убранной конфигурации; рассматриваемый датчик может быть датчиком положения или датчиком, связанным с кабелем, прикрепленным к крановой стреле, и т.д.
Также возможно, что лебедка крановой стрелы связана также с датчиком для измерения нагрузки или того, насколько далеко крюк находится от конца своего хода, то есть в полностью поднятом положении и т.п.
Кроме того, может быть форма осуществления изобретения, в которой, помимо распознавания рабочего состояния оборудования 2, возможно распознавание, какое оборудование 2 используется, и, следовательно, можно выбирать правильную диаграмму.
В этом случае вышеупомянутый модуль 31 памяти содержит несколько наборов грузовых диаграмм для соответствующих видов оборудования, в то время как блок 3 обработки данных содержит также модуль 34 оборудования, сконфигурированный для выбора набора, из которого следует выбирать диаграмму, которая будет использоваться, исходя из оборудования 2, прикрепленного к стреле.
Для этой цели изобретение может содержать устройство 5 для распознавания оборудования 2, соединенного со стрелой 11, соединенное с блоком 3 обработки данных, с которым связан модуль 34 оборудования.
Например, устройство 5 распознавания может быть разработано для беспроводной связи и может работать на радиочастоте, такой как у приемопередатчика радиочастотной идентификации (Radio Frequency Identifeation, RFID) или технологии Bluetooth, либо оно может использовать оптическую технологию, такую как считывание штрих-кода, или физическое соединение электрического типа с помощью гнезд, штепселей или тому подобного.
Таким образом, как только оборудование 2 смонтировано на крепежном приспособлении 110 подъемной стрелы 11, система безопасности извлекает диаграмму, разработанную для оборудования 2 такого типа, например, вил, а не платформы, и может также выбрать конкретную диаграмму для конкретных примеров в контексте этого типа оборудования, то есть конкретной платформы, рассчитанной на определенную максимальную нагрузку, или крановой стрелы с определенным числом крюков и т.п.
Предпочтительно система согласно изобретению для задач выбора грузовой диаграммы может объединять распознавание оборудования 2 с результатами измерений вышеупомянутых датчиков 41, 42.
Изобретение также может быть осуществлено в виде способа обеспечения безопасности самоходной рабочей машины 1, в частности, описанного выше типа.
С точки зрения его общих аспектов, способ включает в себя следующие этапы:
- предоставление множества грузовых диаграмм, предназначенных для определения эксплуатационных возможностей исполнительных механизмов упомянутой машины 1;
- измерение по меньшей мере одного рабочего параметра, относящегося к заданному режиму эксплуатации рабочей машины 1; и
- выбор грузовой диаграммы на основе полученного рабочего параметра.
Выбранная диаграмма используется для определения поведения исполнительных механизмов, которые, в частности, управляют движением оборудования 2.
Следует отметить, что функции и особенности устройства 1, предложенного выше, включая функции, выполняемые блоком 3 обработки данных и его модулями, соответствуют возможным этапам способа в соответствии с изобретением.
В частности, вышеупомянутый рабочий параметр может быть значением нагрузки, измеренным на оборудовании 2, перемещаемом подъемной стрелой 11 машины 1, или значением положения, измеренным на оборудовании 2.
Кроме того, несколько наборов грузовых диаграмм могут быть доступны для соответствующих видов оборудования 2, которые могут использоваться машиной 1, и в этом случае способ включает в себя распознавание типа оборудования 2, используемого машиной 1, и затем идентификацию набора, из которого можно выбирать диаграмму, которая будет использоваться, на основе оборудования 2, соединенного со стрелой 11 погрузчика.
Кроме того, изобретение относится также к компьютерной программе, которая, работая в блоке 3 обработки данных, выполняет этапы предложенного способа.
Группа изобретений относится к системе безопасности для самоходных рабочих машин. Система безопасности содержит блок обработки (3) данных, который включает в себя модуль (31) памяти, ограничивающий модуль (32), измерительное устройство (41, 42) для получения рабочих параметров, относящихся к различным условиям эксплуатации рабочей машины (1), и модуль (33) выбора. В модуле (31) памяти записано множество грузовых диаграмм. Ограничивающий модуль (32) сконфигурирован для ограничения возможности работы исполнительных механизмов машины (1) на основе грузовой диаграммы. Модуль (33) выбора сконфигурирован для выбора из модуля (31) памяти грузовой диаграммы на основе рабочего параметра, полученного от измерительного устройства (41, 42). Достигается повышение функциональности работы системы безопасности для самоходных рабочих машин. 4 н. и 14 з.п. ф-лы, 6 ил.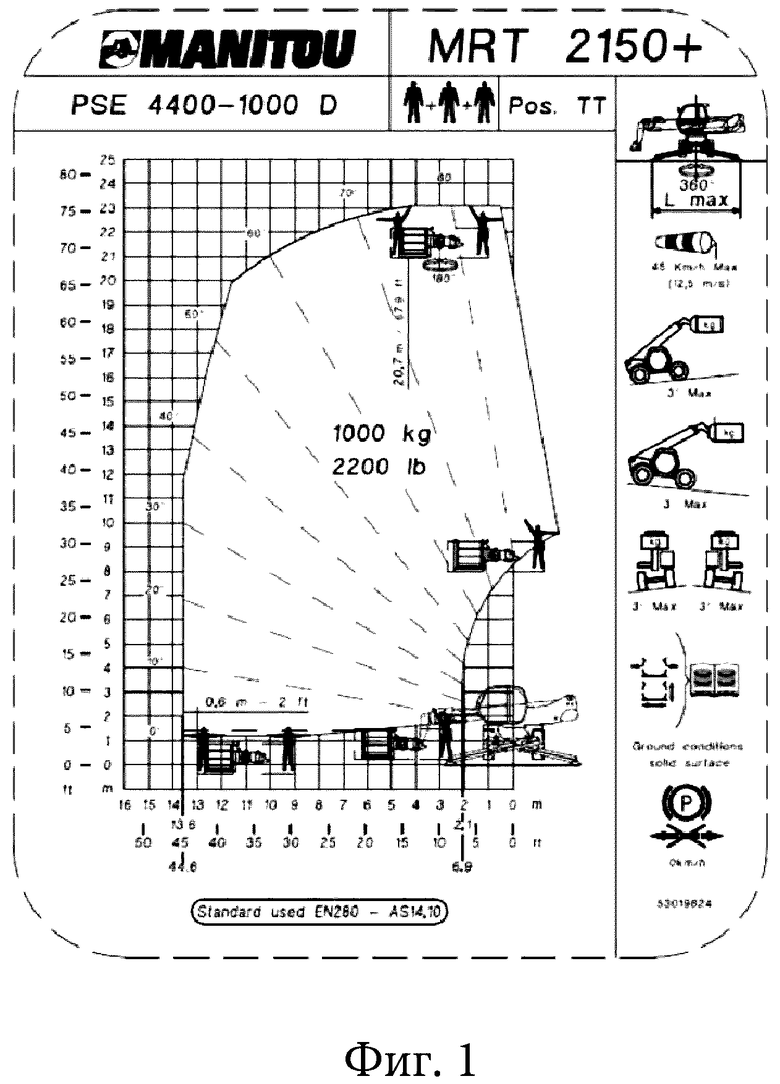
1. Система безопасности для самоходной рабочей машины (1), содержащая блок обработки (3) данных, который включает в себя:
по меньшей мере один модуль (31) памяти, в котором записано множество грузовых диаграмм;
по меньшей мере один ограничивающий модуль (32), сконфигурированный для ограничения возможности работы исполнительных механизмов машины (1) на основе грузовой диаграммы;
по меньшей мере одно измерительное устройство (41, 42) для получения рабочих параметров, относящихся к различным условиям эксплуатации рабочей машины (1); и
по меньшей мере один модуль (33) выбора, сконфигурированный для выбора из модуля (31) памяти грузовой диаграммы на основе рабочего параметра, полученного от измерительного устройства (41, 42),
при этом система безопасности сконфигурирована для использования с самоходной рабочей машиной (1), оснащенной подъемной стрелой (11), к которой может быть прикреплено съемным образом множество видов оборудования (2), при этом модуль (31) памяти содержит несколько наборов грузовых диаграмм для соответствующих видов оборудования, а блок (3) обработки данных содержит модуль (34) оборудования, сконфигурированный для выбора набора, из которого следует выбирать диаграмму, которая будет использоваться, исходя из оборудования (2), прикрепленного к стреле (11).
2. Система безопасности по п. 1, в которой измерительное устройство представляет собой датчик (42) нагрузки.
3. Система безопасности по п. 1 или 2, в которой измерительное устройство представляет собой экстензометр (41).
4. Система безопасности по любому из предыдущих пунктов, в которой измерительное устройство представляет собой датчик положения.
5. Система безопасности по любому из предыдущих пунктов, содержащая устройство (5) для распознавания оборудования (2), прикрепленного к стреле (11), соединенное с блоком (3) обработки данных, причем модуль (34) оборудования управляется устройством (5) распознавания.
6. Самоходная рабочая машина (1), содержащая подъемную стрелу с оборудованием (2) для подъема или перемещения грузов, а также систему безопасности по любому из предыдущих пунктов, причем одно или более измерительных устройств (41, 42) расположены на оборудовании (2).
7. Машина (1) по п. 6, в которой одно или более измерительных устройств расположены на стреле (11).
8. Машина (1) по п. 6, в которой оборудование (2) представляет собой грузовую платформу (21), снабженную приспособлением (211) для крепления и поддержки, соединенным с соответствующей задней стороной и предназначенным для крепления к подъемной стреле (11), причем измерительные устройства (41) расположены на упомянутом приспособлении (211) для крепления и поддержки.
9. Машина (1) по п. 8, в которой одно или более измерительных устройств представляют собой датчики нагрузки, расположенные на упомянутом приспособлении (211) для крепления и поддержки.
10. Машина (1) по п. 6, в которой одно или более измерительных устройств представляют собой датчики нагрузки, расположенные на основании (210) грузовой платформы (21).
11. Машина (1) по п. 8, в которой одно или более измерительных устройств представляют собой экстензометры, расположенные между упомянутым приспособлением (211) для крепления и поддержки и упомянутой задней стороной.
12. Машина (1) по п. 11, в которой датчиками являются стержни экстензометра (41), которые соединяют приспособление (211) для крепления и поддержки и соответствующие стойки боковой стенки платформы (21).
13. Машина (1) по п. 6 или 7, в которой оборудование (2) представляет собой стрелу с двумя или более крюками (22), по меньшей мере два из которых функционально связаны с измерительным устройством (42).
14. Машина (1) по п. 6, в которой оборудование (2) представляет собой выдвигаемую стрелу, а измерительное устройство представляет собой датчик, предназначенный для определения того, находится ли стрела в выдвинутой конфигурации или во втянутой конфигурации.
15. Способ обеспечения безопасности для самоходной машины (1), включающий следующие этапы:
предоставление множества грузовых диаграмм, предназначенных для определения эксплуатационных возможностей исполнительных механизмов машины (1);
измерение по меньшей мере одного рабочего параметра, исходя из заданного режима эксплуатации рабочей машины (1); и
выбор грузовой диаграммы на основе полученного рабочего параметра, при этом несколько наборов грузовых диаграмм предоставляют для соответствующих видов оборудования (2), которые могут использоваться машиной (1), и способ также включает этапы:
распознавания оборудования (2), используемого машиной (1); и
идентификации набора, из которого можно выбрать диаграмму, которая будет использоваться, исходя из оборудования (2), прикрепленного к стреле.
16. Способ по п. 15, в котором рабочим параметром является значение нагрузки, измеренное на оборудовании (2), которое несет подъемная стрела машины (1).
17. Способ по п. 15 или 16, в котором рабочим параметром является значение положения, измеренное на оборудовании (2).
18. Модуль памяти, содержащий компьютерную программу, которая при исполнении в блоке (3) обработки данных системы безопасности самоходной рабочей машины выполняет этапы способа по любому из пп. 15-17.
| KR 20180068035 A, 21.06.2018 | |||
| CN 107857212 A, 30.03.2018 | |||
| US 2017260029 A1, 14.09.2017 | |||
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2267457C2 |
| ВОЗДУХОРАСПРЕДЕЛИТЕЛЬ ДЛЯ АВТОМАТИЧЕСКИХ ТОРМОЗОВ С ЭЛЕКТРИЧЕСКИМ И ВОЗДУШНЫМ УПРАВЛЕНИЕМ | 1933 |
|
SU36455A1 |

