Данное изобретение относится к усовершенствованной стреле с двумя или более крюками, предназначенной для использования в качестве оборудования на телескопических погрузчиках или других самоходных рабочих машинах.
Известна стрела предшествующего уровня техники с двумя или более крюками, которая содержит крюки, расположенные вдоль соответствующей опорной балки, и предназначена для подвешивания на дальнем конце телескопического рабочего плеча телескопического погрузчика.
Каждый крюк рассчитан на поддержку соответствующего груза, вес которого отличается от поддерживаемого веса других крюков, например, 25 тонн вместо 13 тонн или 18 тонн, и так далее.
Несмотря на то, что стрелы предшествующего уровня техники с двумя или более крюками являются очень полезным оборудованием для определенных устройств, тем не менее, у них есть ограничения.
Например, может случиться так, что оператор неправильно оценивает вес поднимаемого груза или не уверен, какой именно крюк следует использовать для определенного веса, вследствие чего груз прикрепляется к крюку, выполненному с возможностью удерживания меньшего веса; в данных обстоятельствах существует риск отсоединения груза от стрелы во время подъема или риск повреждения стрелы.
Кроме того, часто случается, что очень громоздкий груз подсоединен к стреле с помощью крепления его к двум крюкам, например, с помощью цепи; в сущности, если груз весит 18 тонн и, например, довольно длинный, например бетонная труба, его можно одновременно подвесить на крюке, выполненном с возможностью выдерживать 25 тонн, и на крюке, выполненном с возможностью выдерживать 13 тонн.
Тем не менее, поскольку при определенных обстоятельствах оператору непросто оценить, где находится центр тяжести груза, может случиться так, что груз, подсоединенный к двум крюкам, переносится больше на крюке, выполненном с возможностью поддержки малого веса, что может привести к тем же самым последствиям, указанным выше при неправильной оценке груза и при ошибке выбора используемого крюка.
Таким образом, техническая цель, которая составляет основу изобретения, состоит в создании стрелы с двумя или более крюками и способа использования стрелы с двумя или более крюками, который выполнен с возможностью преодоления ограничений предшествующего уровня техники.
Данная цель достигается путем использования стрелы, выполненной по п. 1 формулы изобретения, и с помощью способа, осуществляемого по п. 17 формулы изобретения.
Дополнительные признаки и преимущества изобретения более очевидны из подробного описания, приведенного ниже, со ссылкой на предпочтительный не ограничивающий вариант выполнения стрелы с двумя или более крюками в соответствии с изобретением, как показано на сопутствующих чертежах, на которых:
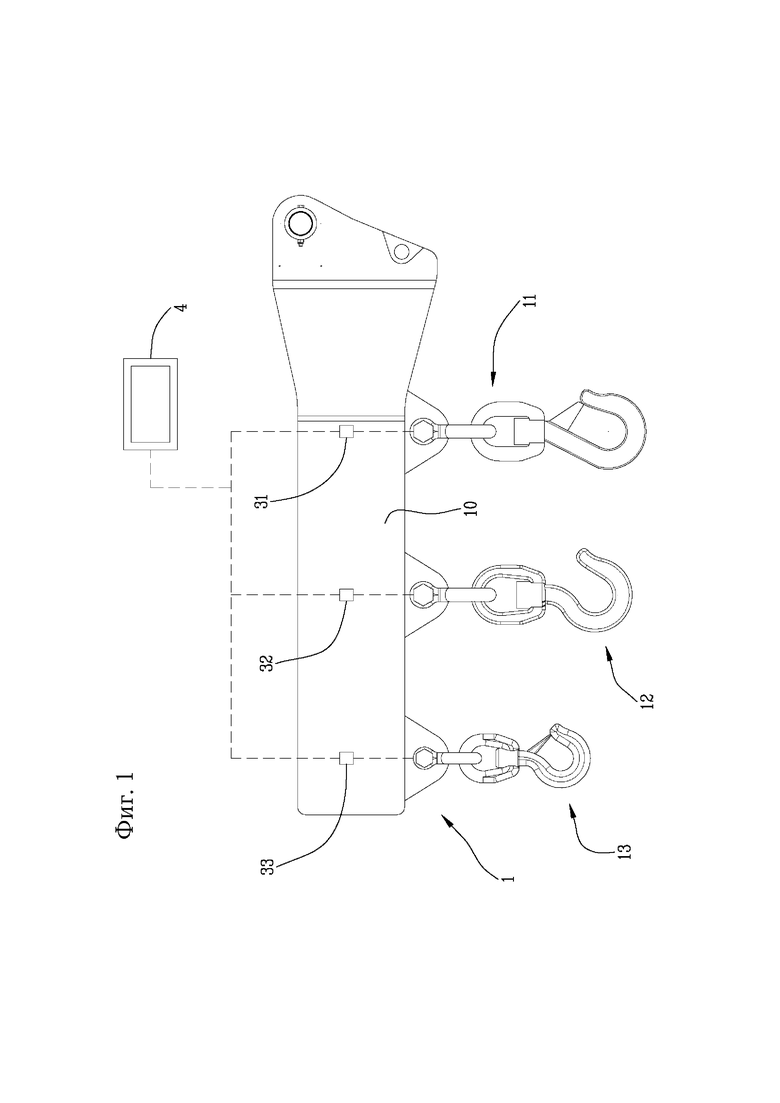
Фиг. 1 изображает вид сбоку стрелы в соответствии с изобретением;
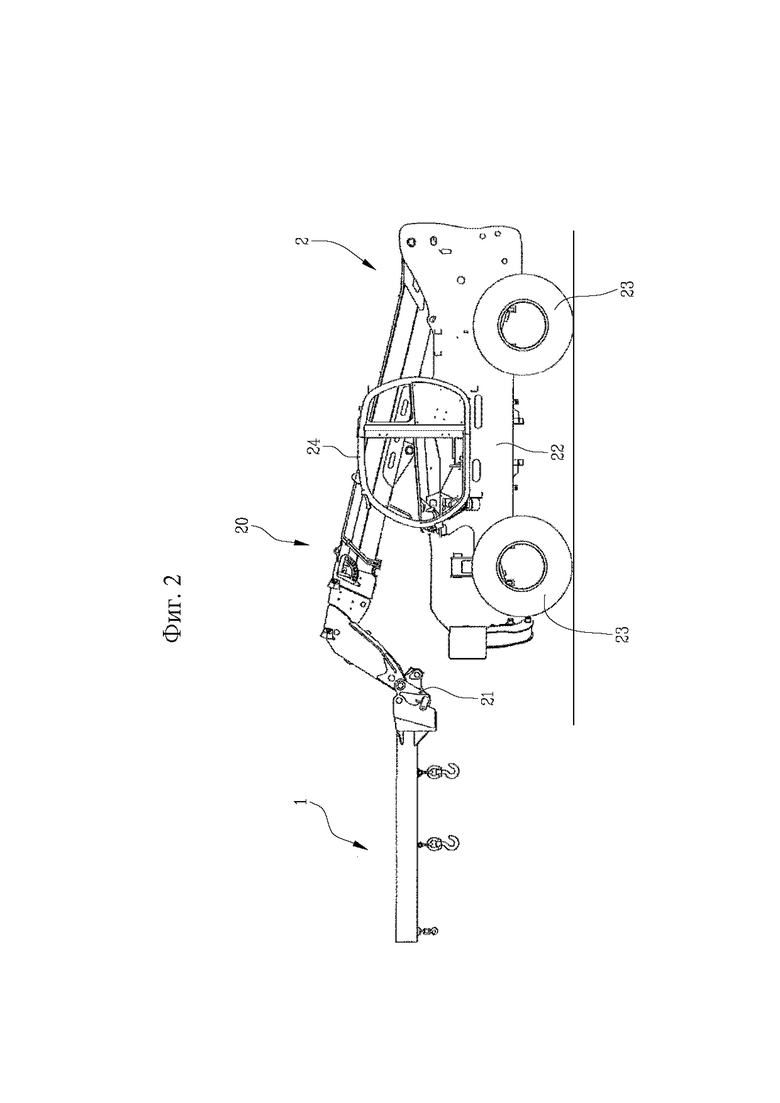
Фиг. 2 изображает вид сбоку телескопического погрузчика, на котором установлена предложенная стрела;
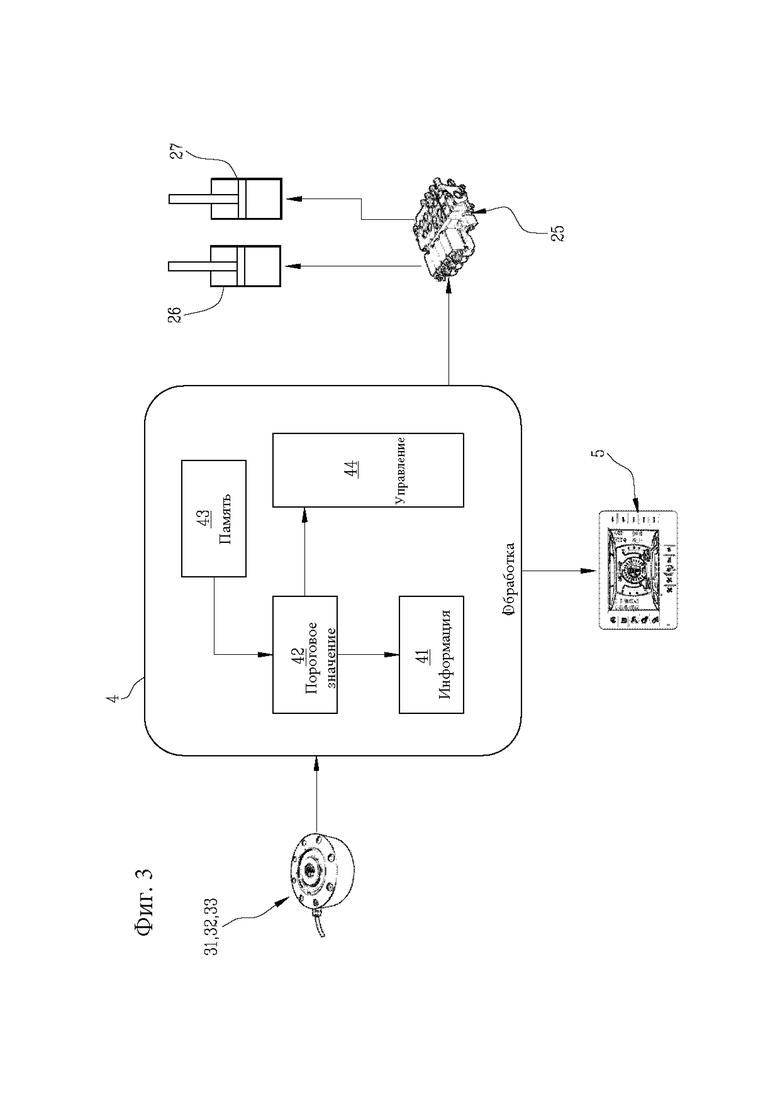
Фиг. 3 схематически изображает электронный блок обработки данных в соответствии с изобретением;
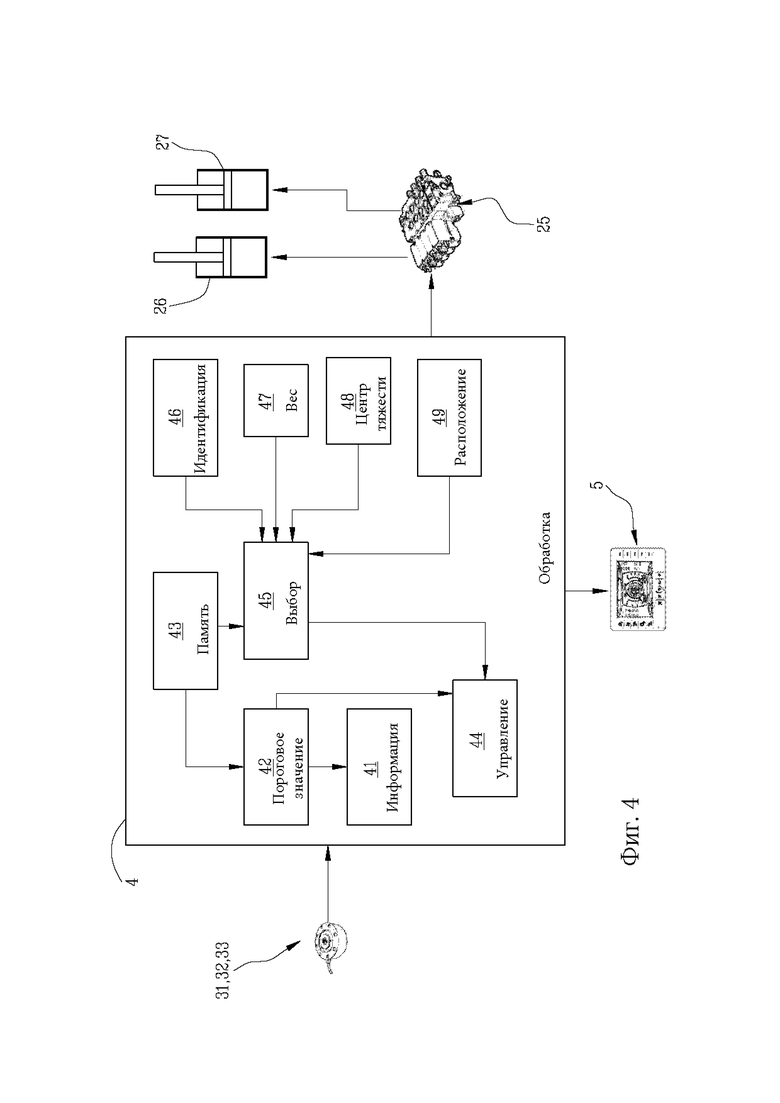
Фиг. 4 схематически изображает электронный блок обработки данных в соответствии с конкретным вариантом выполнения;
На сопутствующих чертежах цифрой 1 обозначена стрела с двумя или более крюками, выполненная согласно изобретению.
Предлагаемая стрела 1 содержит опорную балку 10, выполненную с возможностью соединения с соединительным устройством 21, имеющимся на дальнем конце рабочего плеча 20 телескопического погрузчика 2.
Как показано на фиг. 1, балка 10 содержит распределенные по ее длине на ее нижней стороне крюки 11, 12, 13, каждый из которых выполнен с возможностью удерживания соответствующего груза, то есть имеет соответствующее максимальное значение веса груза.
Подробнее, максимальный вес, который может удерживаться с помощью одного из крюков 11, 12, 13, отличается от веса, который может удерживаться с помощью двух других крюков и, как правило, уменьшается при перемещении крюка к дальнему концу; например, в случае стрел 1 с тремя крюками, такими как показано на чертежах, самый внутренний крюк выполнен с возможностью удерживания 25 тонн, промежуточный выполнен с возможностью удерживания 18 тонн и самый внешний выполнен с возможностью удерживания 13 тонн (которые явно являются примерными значениями).
В соответствии с важным аспектом изобретения, схематично показанным на фиг. 2, датчик относительной нагрузки соединен с по меньшей мере одним из крюков 11, 12, 13, но предпочтительно со всеми крюками 11, 12, 13.
Подробнее, как схематично показано на фиг. 1, каждый из крюков 11, 12, 13 может быть подключен к соответствующему датчику 31, 32, 33 нагрузки, который измеряет вес груза, который удерживается крюком 11, 12, 13 и, следовательно, формирует сигнал нагрузки, представляющий снятые измерения.
Датчики 31, 32, 33 предпочтительно содержатся в балке 10 или расположены между балкой 10 и крюками 11, 12, 13.
На практике стрела 1 с двумя или более крюками в соответствии с изобретением выполнена с возможностью измерения веса, который фактически несет каждый из крюков 11, 12, 13, и это обеспечивает преодоление всех ограничений предшествующего уровня техники, как будет ясно объяснено в описании работы изобретения.
Изобретение также выполнено в виде системы крепления для телескопических погрузчиков или других самоходных рабочих машин, которая кроме того, что содержит предложенную стрелу 1 с двумя или более крюками, также содержит электронный блок 4 обработки данных, соединенный с датчиками нагрузки и выполненный с возможностью приема и обработки вышеупомянутых сигналов нагрузки.
В данном описании электронный блок 4 обработки данных будет представлен в виде разделенного на отдельные функциональные модули исключительно для четкого и полного описания функций.
На практике такой блок 4 обработки данных может состоять из одного электронного устройства, при необходимости также такого типа, который обычно присутствует на данном типе машины, соответствующим образом запрограммированного для выполнения описанных функций; различные модули могут соответствовать аппаратным блокам и/или процедурам программного обеспечения, образующим часть запрограммированного устройства.
Альтернативно или дополнительно указанные функции могут выполняться несколькими электронными устройствами, на которых могут быть распределены вышеупомянутые функциональные модули.
В общем случае, блок 4 обработки данных может иметь один или более микропроцессоров или микроконтроллеров, выполненных с возможностью выполнения инструкций, содержащихся в модулях памяти, и вышеупомянутые функциональные модули также могут быть распределены по локальным или удаленным вычислительным устройствам, выполненным на основе архитектуры сети, в которой они расположены.
Благодаря использованию датчиков 31, 32, 33 и блока 4 обработки данных изобретение позволяет вмешаться в работу вручную или автоматически во избежание рисков, проиллюстрированных при обсуждении предшествующего уровня техники.
Ниже сначала описан ручной режим вмешательства, а затем автоматический способ с учетом того, что использование этих двух способов и, следовательно, соответствующих технических деталей не является взаимоисключающим.
Прежде всего следует отметить, что телескопический погрузчик 2, для которого предназначено изобретение, содержит раму или ходовую часть 22, которая опирается на приводные колеса 23 и выполнена с возможностью непосредственной установки кабины 24 водителя или башни или содержит поворотную раму, на которой расположена кабина.
Телескопический погрузчик 2 содержит электрогидравлический распределитель 25, который управляет различными гидравлическими приводными устройствами 26, 27 изобретения (см. схематическую иллюстрацию на фиг. 3).
Рабочее плечо 20 выполнено телескопическим и шарнирно прикреплено к ходовой части 22 или к башне на ближнем конце, причем на дальнем конце оно содержит соединительное устройство 21, которое упомянуто выше и которое позволяет выполнять съемное соединение оборудования, включая предложенную стрелу 1.
Для перемещения плеча 20 выполнено несколько схематично показанных на фиг. 3 гидравлических приводных элементов 26, 27, соединенных с распределителем 25, более конкретно для подъема и опускания указанного плеча, для удлинения и укорочения указанного плеча и, при необходимости, для обеспечения функциональности устройства.
Точнее, имеется первый приводной элемент 26, предпочтительно гидравлический цилиндр, выполненный с возможностью поворота плеча 20 вокруг шарнира, то есть выполненный с возможностью опускания и подъема.
Кроме того, внутри частей, вставленных с возможностью скольжения одна в другую, которые образуют телескопическое плечо 20, содержится по меньшей мере второй приводной элемент 27 удлинения/втягивания, соединенный с указанными частями и представляющий собой гидравлический цилиндр.
Внутри кабины 24 предусмотрены командные сигналы, по сути, известного типа, с помощью которых оператор может управлять как движением транспортного средства 2, так и движениями рабочего плеча 20, воздействуя на гидравлический распределитель 25, который получает электрические управляющие сигналы от командных сигналов.
Изобретение может содержать устройство 5 связи, соединенное с блоком 4 обработки данных и выполненное с возможностью предоставления оператору информации относительно грузов, удерживаемых стрелой 1.
На практике в кабине 24 телескопического погрузчика 2 или на мобильном устройстве, доступном оператору, например на пульте дистанционного управления, может иметься интерфейс или другие средства, выполненные с возможностью передачи информации, которые позволяют оператору знать фактический вес, который несет конкретный крюк стрелы 1.
Рассмотрим, например, блок 5 отображения, в котором числовые или графические индексы позволяют оператору понять, какие крюки 11, 12, 13 находятся в зацеплении и с каким весом, а также другую информацию, такую как максимальная нагрузка, которую может удерживать каждый крюк, или другую информацию; кроме того, также возможно, что это средство 5 связи выполнено с возможностью формирования других визуальных или звуковых сигналов для сообщения оператору рабочего состояния стрелы 1.
Также блок 4 обработки данных содержит информационный модуль 41, который выполнен с возможностью формирования информационных сигналов, зависящих от измерений вышеупомянутых датчиков 31, 32, 33.
Данные сигналы предназначены для управления устройством 5 связи, например вышеупомянутым блоком отображения, так, что они показывают оператору данные о нагрузках, измеренные с использованием датчиков 31, 32, 33.
Данный первый тип работы системы в соответствии с изобретением может позволить оператору сразу понять, была ли допущена ошибка в оценке груза, который должен быть прикреплен к определенному крюку 11, 12, 13, или был ли определен неправильно крюк для груза определенного веса, или при подвешивании груза на два разных крюка не переносится ли больший вес более слабым крюком.
Тем не менее, изобретение преимущественно обеспечивает другие измерения для повышения эффективности и результативности использования стрелы 1 с двумя или более крюками.
Фактически, блок 4 обработки данных может содержать пороговый модуль 42, выполненный с возможностью проверки одного или более крюков 11, 12, 13, не превышает ли удерживаемый ими груз соответствующий порог риска в зависимости от максимального значения веса, для удержания которого они предназначены.
Например, пороговое значение может быть равно максимальному значению удерживаемого веса за вычетом отклонения, которое может быть зафиксировано для всех крюков 11, 12, 13 или может быть переменным, например в процентах от максимального веса или другого отношения; также может быть пороговое значение, равное максимальному весу или верхнему пределу.
Возможны другие способы определения, расчета или параметризации указанного отклонения.
Пороговые значения и любые отклонения могут быть записаны в модуле 43 памяти блока 4 обработки данных, который также может содержать другие данные, параметры и информацию, используемые модулями блока 4 обработки данных.
В любом случае вышеупомянутый информационный модуль 41 может быть соединен с пороговым модулем 42 и, таким образом, может быть выполнен с возможностью выдачи информационных сигналов, предназначенных для того, чтобы устройство 5 отображения (или другое информационное устройство) формировало аварийные сообщения, направленные оператору, если вес, удерживаемый одним или более крюками 11, 12, 13 достиг соответствующего порога риска или превысил его.
На практике оператор, который управляет телескопическим погрузчиком 2 из кабины 24, получает информацию о том, что имеются грузы, которые являются чрезмерными по отношению к крюкам 11, 12, 13, к которым они были подсоединены, и что их перемещение, таким образом, может быть опасно.
Как уже упоминалось, телескопический погрузчик 2 содержит устройство управления рабочим плечом 2, содержащее гидравлические приводные устройства 26, 27, установленные на указанном плече, и распределитель 25; в изобретении используются данные компоненты для автоматического управления опасными условиями, связанными с нагрузками, подвешенными на крюках 11, 12, 13 стрелы 1.
Фактически, в данном варианте выполнения блок 4 обработки данных содержит модуль 44 управления, соединенный с пороговым модулем 42 и выполненный с возможностью формирования управляющего сигнала, обеспечивающего регулирование работы распределителя 25 в зависимости от проверок, выполненных модулем 42.
Подробнее, если груз, связанный с одним крюком 11, 12, 13 или крюками 11, 12, 13, достигает относительного порогового значения или превышает его, блок 4 обработки данных может передать в распределитель 25 сигнал, который вызывает блокировку движений плеча 20, или он также может выдать управляющий сигнал, позволяющий плечу 20 выполнять только движения втягивания и/или опускания.
Работа изобретения кратко поясняется ниже.
После того, как оператор подсоединил один или более грузов к крюкам 11, 12, 13 стрелы 1, оператор забирается в кабину 24 для управления подъемным плечом 20, на которое установлена стрела 1, используя подходящие командные сигналы.
Если груз с чрезмерным весом присоединен к крюку 11, 12, 13, или если груз неправильно оценен, или использован неправильный крюк 11, 12, 13, предложенная система сигнализирует, например с помощью блока 5 отображения и/или громкоговорителя, о потенциальной опасности при подъеме груза и его переносе в пункт назначения.
То же самое применимо, если значительный груз, прикрепленный к двум или более крюкам 11, 12, 13, имеет центр тяжести, который в большей степени и избыточно воздействует на крюк, который имеет более низкий предел максимального веса.
Дополнительно или альтернативно, в указанных опасных условиях система предотвращает перемещение плеча 20 оператором посредством команд из кабины 24.
Изобретение также выполнено как способ безопасного использования стрелы с двумя или более крюками, установленной на рабочее плечо 20 телескопического погрузчика 2 или предназначенной для такой установки; подробнее способ может быть реализован с помощью стрелы 1 с двумя или более крюками, описанной выше.
В общих чертах, способ включает этапы подвешивания одного или более грузов на один или более крюков 11, 12, 13 стрелы 1 и измерения веса подвешенного груза или грузов.
Кроме того, способ включает этапы, которые соответствуют всем или некоторым из функций, обеспечиваемых предлагаемыми стрелой 1 и системой, как описано выше.
Конкретнее предложенный способ может предоставить оператору информацию, представляющую вес груза.
Кроме того, возможен этап проверки одного или более крюков 11, 12, 13, не превышает ли удерживаемый ими груз соответствующий порог риска в зависимости от максимального значения веса, для удержания которого эти крюки предназначены.
В данном случае преимущественно может быть предусмотрен этап формирования аварийного предупреждения, направляемого оператору при установлении того факта, что вес, удерживаемый одним или более крюками 11, 12, 13, равен или превышает соответствующий вышеупомянутый порог риска.
Кроме того, возможна регулировка работы определенного выше устройства управления рабочим плечом, которое по существу содержит распределитель и гидравлические цилиндры указанного плеча, в зависимости от того, достигает ли груз, удерживаемый одним или более крюками 11, 12, 13, соответствующего порога риска или превышает его.
Конкретнее, может быть установлено, что движения плеча 20 блокируются, когда груз, который удерживается одним или более крюками 11, 12, 13, достиг соответствующего порога риска или превысил его.
Дополнительно или альтернативно, рабочее плечо 20 может быть выполнено с возможностью выполнения движений втягивания и/или опускания, когда груз, удерживаемый одним или более крюками 11, 12, 13, достиг соответствующего порога риска или превысил его.
Изобретение также содержит дополнительный вариант выполнения, который позволяет получить дополнительные преимущества.
Подробнее, данный вариант выполнения позволяет автоматически изменять диаграмму нагрузки, примененную блоком обработки данных к движениям рабочего плеча, в зависимости от различных рабочих условий указанного плеча.
Точнее, блок 4 обработки данных сначала содержит диаграммы нагрузки, записанные в модуле памяти.
В данном случае модуль управления выполнен с возможностью ограничения рабочих возможностей устройства 25, 26, 27 управления на основе диаграммы нагрузки, и блок 4 обработки данных также содержит модуль 45 выбора, выполненный с возможностью автоматического выбора диаграммы нагрузки из модуля 43 памяти, на основании сигналов, полученных подходящими датчиками.
Понятно, что для максимального повышения безопасности и эффективности работы стрелы 1 блок 4 обработки данных может учитывать один или более из следующих параметров, относящихся к конкретному условию работы: вес, измеренный датчиками нагрузки, на какой крюк или на какие крюки подвешен груз, положение указанной стрелы, если она имеет изменяемую конфигурацию, и где находится центр тяжести подвешенного груза.
Подробнее, блок 4 обработки данных содержит модуль идентификации, выполненный с возможностью определения того, какой крюк нагружен (какие крюки нагружены) соответствующими грузами 46, в зависимости от сигналов, сформированных соответствующими датчиками 31, 32, 33 нагрузки; в данном случае модуль 45 выбора выполнен с возможностью выбора диаграммы относительной нагрузки из модуля 43 памяти на основании того, какой крюк 11, 12, 13 нагружен (какие крюки нагружены).
Кроме того, блок 4 обработки данных может содержать модуль 47 веса, выполненный с возможностью вычисления значений веса, удерживаемого крюками в зависимости от сигналов, полученных от датчиков 31, 32, 33 нагрузки; в данном случае модуль 45 выбора выполнен с возможностью выбора диаграммы нагрузки из модуля 43 памяти на основе измеренных значений веса.
Кроме того, указанный блок обработки данных может содержать модуль 48 центра тяжести, выполненный с возможностью вычисления положения центра тяжести груза, висящего на крюках, в зависимости от того, какой крюк нагружается (какие крюки нагружаются) соответствующими грузами, и от значений веса, удерживаемого крюками; в данном случае модуль 45 выбора выполнен с возможностью выбора диаграммы нагрузки из модуля 43 памяти на основе указанного положения центра тяжести.
Положение центра тяжести может быть рассчитано в зависимости от любого эталона, предпочтительно загруженного в указанную машину.
Если стрела 1 выполнена с возможностью перемещения между несколькими положениями, например с возможностью выдвижения и/или поворота, то система согласно изобретению содержит по меньшей мере один датчик положения (не показан), выполненный с возможностью определения текущего положения стрелы 1 и с возможностью передачи сигнала положения в блок 4 обработки данных.
В данном случае блок 4 обработки данных содержит модуль 49 положения, выполненный с возможностью определения положения стрелы 1 в зависимости от сигнала положения, а модуль 45 выбора выполнен с возможностью выбора диаграммы нагрузки из модуля 43 памяти на основе определенного положения стрелы 1.
На практике изобретение преодолевает ограничения предшествующего уровня техники, когда выбор подходящей диаграммы все еще остается за оператором, в зависимости от крюка, который оператор хочет нагрузить, или положения, в котором оператор хочет использовать вспомогательное средство 1.
Подробнее, изобретение позволяет предотвратить не только риск ошибки при выборе применяемой диаграммы нагрузки, но также и предотвращает использование оператором диаграммы, слишком неподходящей по отношению к конкретным рабочим условиям плеча.
Например, когда объемный груз навешен одновременно более чем на один крюк 11, 12, 13, изобретение предотвращает выбор оператором диаграммы, которая является или не является безопасной, для защиты от перегрузки или от чрезмерно осторожной оценки, которая приведет к потере работоспособности с точки зрения раздвижения и маневренности плеча.
В сущности, блок 4 обработки данных позволяет сразу узнать вес груза на каждом крюке 11, 12, 13 и относительные положения и, таким образом, может вычислить значения общей нагрузки и фактическое положение ее центра тяжести, в результате чего возможен автоматический выбор диаграммы нагрузки, наиболее подходящей для обеспечения максимальной безопасности и производительности.
Изобретение относится к грузоподъемным устройствам. Стрела (1) с двумя или более крюками содержит опорную балку (1), выполненную с возможностью соединения с рабочим плечом (20) телескопического погрузчика (2) или другой самоходной рабочей машины, и крюки (11, 12, 13), которые распределены вдоль балки (10) и каждый из которых предназначен для удержания соответствующего груза. Один или более крюков (11, 12, 13) соединен(ы) с датчиками (31, 32, 33) нагрузки. Достигается усовершенствование стрелы и возможность распределения нагрузки. 4 н. и 19 з.п. ф-лы, 4 ил.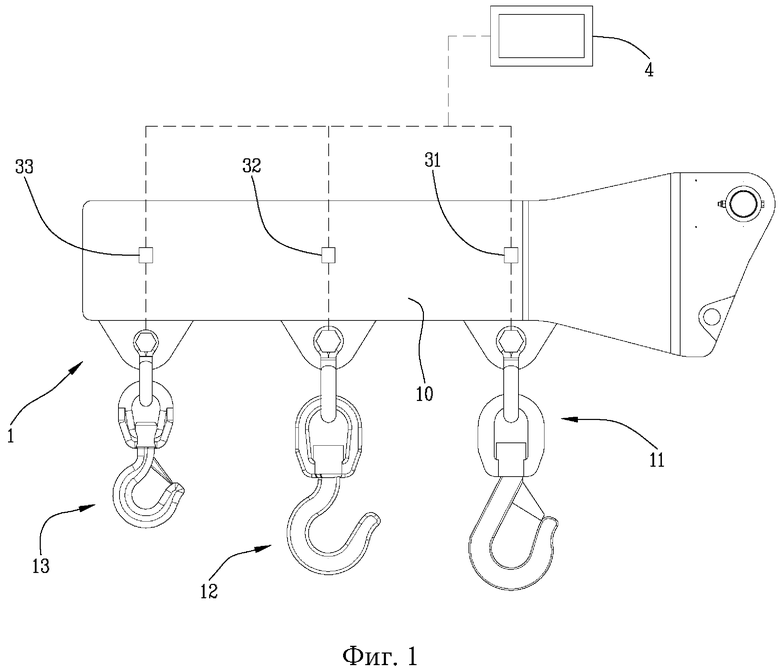
1. Стрела (1) с двумя или более крюками, содержащая опорную балку (10), выполненную с возможностью присоединения к рабочему плечу (20) телескопического погрузчика (2) или другой самоходной рабочей машины, и крюки (11, 12, 13), которые распределены вдоль указанной балки (10) и каждый из которых выполнен с возможностью удерживания соответствующего груза, отличающаяся тем, что один или более крюков (11, 12, 13) соединен с датчиком (31, 32, 33) нагрузки.
2. Стрела (1) по п. 1, в которой каждый крюк (11, 12, 13) соединен с соответствующим датчиком (31, 32, 33) нагрузки.
3. Соединительная система для самоходной рабочей машины, содержащая стрелу (1) по любому из предыдущих пунктов и электронный блок (4) обработки данных, соединенный с указанными датчиками (31, 32, 33) нагрузки, причем каждый из указанных датчиков выполнен с возможностью формирования сигнала нагрузки в зависимости от веса груза, удерживаемого соответствующим крюком (11, 12, 13).
4. Соединительная система по п. 3, содержащая устройство (5) связи, соединенное с блоком (4) обработки данных и выполненное с возможностью передачи оператору указанного телескопического погрузчика (2) информации о грузе или грузах, удерживаемых стрелой (1), причем указанный блок (4) обработки данных содержит информационный модуль (41), выполненный с возможностью формирования информационных сигналов, обеспечивающих управление устройством так, что данный модуль показывает оператору информацию о грузе в зависимости от измерений, выполненных датчиками (31, 32, 33) нагрузки.
5. Соединительная система по п. 3 или 4, в которой блок (4) обработки данных содержит пороговый модуль (42), выполненный с возможностью проверки для одного или более крюков (11, 12, 13), не превышает ли удерживаемый ими груз соответствующий порог риска в зависимости от максимального значения веса, для удержания которого данные крюки предназначены.
6. Соединительная система по п. 4 или 5, в которой указанный информационный модуль (41) подчинен указанному пороговому модулю (42) и выполнен с возможностью формирования информационных сигналов, обеспечивающих передачу в указанное информационное устройство (5) аварийных предупреждений, направляемых оператору, после обнаружения того факта, что вес, удерживаемый одним или более крюками (11, 12, 13), достиг относительного указанного порога риска или превысил этот порог.
7. Соединительная система по п. 5 или 6, содержащая устройство (25, 26, 27) управления указанным рабочим плечом (20), причем блок (4) обработки данных содержит модуль (44) управления, выполненный с возможностью формирования управляющего сигнала, обеспечивающего регулировку работы указанного устройства (25, 26, 27) управления в зависимости от проверок, выполняемых пороговым модулем (42).
8. Соединительная система по п. 7, в которой модуль (44) управления выполнен с возможностью формирования управляющего сигнала, обеспечивающего блокировку движений плеча (20) с помощью устройства (25, 26, 27) управления.
9. Соединительная система по п. 7 или 8, в которой модуль (44) управления выполнен с возможностью формирования управляющего сигнала, обеспечивающего выполнение движений втягивания и/или опускания плеча (20) с помощью устройства (25, 26, 27) управления.
10. Соединительная система по любому из пп. 7-9, в которой устройство управления содержит электрогидравлический распределитель (25), выполненный с возможностью управления гидравлическими цилиндрами (26, 27) для перемещения рычага в зависимости от принятых управляющих сигналов.
11. Соединительная система по любому из пп. 3-10, в которой блок (4) обработки данных содержит по меньшей мере один модуль (43) памяти, в котором записаны диаграммы нагрузки, и модуль (45) выбора, выполненный с возможностью выбора диаграммы нагрузки из модуля (43) памяти на основе сигналов, полученных от датчиков (31, 32, 33), причем модуль (44) управления выполнен с возможностью ограничения рабочих возможностей устройства (25, 26, 27) управления на основе выбранной диаграммы нагрузки.
12. Соединительная система по п. 11, в которой блок (4) обработки данных содержит модуль идентификации, выполненный с возможностью определения того, какой крюк (крюки) нагружен (нагружены) соответствующими грузами (46) в зависимости от сигналов, сформированных соответствующими датчиками (31, 32, 33) нагрузки, причем указанный модуль выбора выполнен с возможностью выбора диаграммы относительной нагрузки из модуля (43) памяти на основании того, какой крюк (11, 12, 13) нагружен (какие крюки нагружены).
13. Соединительная система по п. 11 или 12, в которой блок (4) обработки данных содержит модуль (47) веса, выполненный с возможностью вычисления значений веса, удерживаемого крюками, в зависимости от сигналов, полученных отдатчиков (31, 32, 33) нагрузки, причем модуль (45) выбора выполнен с возможностью выбора диаграммы нагрузки из модуля (43) памяти на основе измеренных значений веса.
14. Соединительная система по п. 12, в которой блок (4) обработки данных содержит модуль (47) веса, выполненный с возможностью вычисления значений веса, удерживаемого крюками, в зависимости от сигналов, полученных от датчиков (31, 32, 33) нагрузки, причем модуль (45) выбора выполнен с возможностью выбора диаграммы нагрузки из модуля (43) памяти на основе измеренных значений веса, и модуль (48) центра тяжести, выполненный с возможностью вычисления положения центра тяжести груза, висящего на крюках, в зависимости от того, какой крюк (крюки) нагружен (нагружены) соответствующими грузами, и от значений веса, удерживаемого крюками, причем модуль (45) выбора выполнен с возможностью выбора диаграммы нагрузки из модуля (43) памяти на основе указанного положения центра тяжести.
15. Соединительная система по любому из пп. 11-14, в которой стрела (1) выполнена с возможностью перемещения между несколькими положениями, например она выполнена с возможностью выдвижения или поворота, и система содержит по меньшей мере один датчик положения, выполненный с возможностью определения текущего положения стрелы (1) и с возможностью передачи в блок (4) обработки данных сигнала положения, причем блок (4) обработки данных содержит модуль (49) положения, выполненный с возможностью определения положения стрелы (1) в зависимости от сигнала положения, а модуль (45) выбора выполнен с возможностью выбора диаграммы нагрузки из модуля (43) памяти на основе обнаруженного положения стрелы (1).
16. Телескопический погрузчик (2), содержащий систему по любому из пп. 3-15.
17. Способ использования стрелы (1) с крюками, установленной на рабочем плече (20) телескопического погрузчика (2) или предназначенной для установки на указанном плече, включающий следующие этапы:
подвешивание одного или более грузов на один или более крюков (11, 12, 13) указанной стрелы (1) и
определение веса подвешенного груза или грузов.
18. Способ по п. 17, в котором оператору передают информацию, представляющую указанный вес груза или грузов.
19. Способ по п. 17 или 18, в котором проверяют для одного или более крюков (11, 12, 13), не превышает ли удерживаемый ими груз соответствующий порог риска в зависимости от максимального значения веса, для удержания которого указанные крюки предназначены.
20. Способ по п. 19, в котором формируют аварийное предупреждение, направляемое оператору, после обнаружения того факта, что вес, удерживаемый одним или более крюками (11, 12, 13), равен соответствующему вышеупомянутому порогу риска или превышает этот порог.
21. Способ по п. 17, в котором используют устройство для управления указанным рабочим плечом (20) и в котором регулируют работу устройства (25, 26, 27) управления плечом (20) в зависимости от того, достигает ли груз, удерживаемый одним или более крюками (11, 12, 13), соответствующего порога риска или превышает этот порог.
22. Способ по п. 21, в котором перемещения плеча (20) блокируют устройством (25, 26, 27) управления, когда груз, удерживаемый одним или более крюками (11, 12, 13), достиг соответствующего порога риска или превысил этот порог.
23. Способ по п. 21 или 22, в котором рабочее плечо (20) выполнено с возможностью выполнения движений втягивания и/или опускания, когда указанный груз, удерживаемый одним или более крюками (11, 12, 13), достиг соответствующего порога риска или превысил этот порог.
| CN 206553065 U, 13.10.2017 | |||
| US 20160287918 A1, 06.10.2016 | |||
| УСТРОЙСТВО для ПОДЪЕМА И БАЛАНСИРОВКИ ГРУЗА | 0 |
|
SU404757A1 |
| US 6092911 A1, 25.07.2000. | |||

