Изобретение относится к подъемно-транспортному машиностроению и предназначено для использования в системах управления грузоподъемных кранов с телескопической стрелой.
Известна система управления крановыми операциями с помощью двух рукояток типа «джойстик» [Кран стреловой КС-54711Б на специальном шасси. Руководство по эксплуатации. КС-54711Б.00.000 РЭ]. Каждая рукоятка обеспечивает управление двумя операциями с возможностью их совмещения, что позволяет постоянно держать руки на рукоятках, управляя всеми четырьмя крановыми операциями.
Известен способ управления грузоподъемным краном и устройство для его реализации [Пат. 2309112 Российская Федерация, МПК B66C 13/18 (2006.01), B66C 23/88 (2006.01). Способ управления грузоподъемным краном и устройство для его реализации [Текст] / Затравкин М.И., Каминский Л.С., Маш Д.М., Пятницкий И.А., Спицын М.И., Федоров И.Г., Червяков А.П.]. Способ заключается в том, что путем воздействия на органы управления краном производится запуск и отключение приводов механизмов, перемещающих оборудование крана, а путем обработки сигналов датчиков производится отключение приводов механизмов по фактору ограничения перемещений либо по фактору перегрузки. Для снижения уровня раскачивания груза на кран дополнительно установлены датчик длины грузового каната и переключатель кратности полиспаста. Создается режим управления приводами механизмов крана, при котором обеспечивается гашение колебаний груза.
В известных системе, способе регулирования и устройстве для его реализации регулирование скорости отдельной операции осуществляется ступенчато, что снижает точность перемещения крюка, эффективность гашения колебаний груза, усложняет действия крановщика при совмещении крановых операций.
Наиболее близкими по технической сущности к заявляемым способу управления грузоподъемным краном и системе для его реализации являются комплексная система защиты и управления стрелового грузоподъемного крана [В.А.Коровин. Комплексная система защиты и управления стрелового грузоподъемного крана. / Коровин В.А., Кретов М.Н., Токарев Д.В., Гераскин С.А., Коровин К.В., Давыдков А.В., Казанцев А.Ф. - Всероссийский информационно-рекламный журнал «Все краны», №02/02, 2006, С.8-11], способ управления грузоподъемным краном и система управления для его осуществления [Пат. 2298518, Российская Федерация, МПК B66C 13/18 (2006.01), МПК B66C 23/18 (2006.01). Способ управления грузоподъемным краном и система управления для его осуществления [Текст] / Коровин В.А., Коровин К.В.].
Известная комплексная система защиты и управления стрелового грузоподъемного крана [В.А.Коровин. Комплексная система защиты и управления стрелового грузоподъемного крана / Коровин В.А., Кретов М.Н., Токарев Д.В., Гераскин С.А., Коровин К.В., Давыдков А.В., Казанцев А.Ф. - Всероссийский информационно-рекламный журнал «Все краны», №02/02, 2006, С.8-11] содержит прибор безопасности, электроуправляемые пропорциональные гидрораспределители, двухкоординатные аппараты управления, включающие рукоятку управления, датчик положения рукоятки, микроконтроллер, драйвер мультиплексной линии связи, силовые защищенные ключи-регуляторы тока. Электроуправляемые пропорциональные гидрораспределители, обеспечивающие для любого управляющего воздействия свой постоянный расход рабочей жидкости и, соответственно, свою постоянную скорость движения исполнительного гидродвигателя или гидроцилиндра независимо от изменения противодействующей нагрузки. Пропорциональное управление краном обеспечивает регулирование скорости крановых операций в широких пределах, высокую плавность пуска и остановки всех механизмов крана, в частности, при реализации защитных функций при приближении грузового момента или параметров пространственного положения стрелы к своим предельным значениям. Причем пороговый уровень какого-либо параметра, при достижении которого осуществляется снижение скорости, устанавливается в зависимости от скорости изменения этого параметра или от приведенного момента инерции перемещающегося механизма крана. Сигналы управления, задаваемые крановщиком при помощи рукояток аппаратов управления, пропорциональны углу отклонения рукоятки от нейтрального положения. Окончательное формирование сигналов управления и разрешения совмещения операций происходит в зависимости не только от отклонений крановщиком рукояток управления, но и от наличия сигнала разрешения от прибора безопасности. Срабатывание защиты от перегрузки, координатной защиты, защиты от опасного приближения к проводам ЛЭП, ограничения рабочих движений, связанные с конструктивными параметрами крана, отказы системы защиты запрещают подачу сигналов управления электрогидравлическими распределителями.
Известные способ управления грузоподъемным краном и система управления для его осуществления [Пат. 2298518, Российская Федерация, МПК B66C 13/18 (2006.01), МПК B66C 23/18 (2006.01). Способ управления грузоподъемным краном и система управления для его осуществления [Текст] / Коровин В.А., Коровин К.В.] предусматривают предварительное определение допустимых значений параметров, характеризующих нагрузку, пространственное положение стрелы, крюка, их запоминание, измерение в процессе работы грузоподъемного крана фактических параметров, сравнение с допустимыми значениями и последующее формирование сигналов управления пропорциональными гидрораспределителями в зависимости от результата этого сравнения, от величины и направления перемещения рукоятки аппарата управления, от выполняемой крановой операции. Эту зависимость предварительно определяют из условия обеспечения безопасной работы крана и улучшения условий труда крановщика и реализуют в конструкции или в программе работы микропроцессорной системы управления. Причем система управления, реализующая способ управления, включает микропроцессорный прибор безопасности, подключенные к нему аппараты управления, содержащие бесконтактный двухкоординатный датчик положения рукоятки, микроконтроллер, устройство ввода-вывода информации, силовые защищенные ключи-регуляторы тока, датчики нагрузки, угла наклона стрелы, длины стрелы, азимута, длины грузового каната, электроуправляемые пропорциональные гидрораспределители.
Однако вышеуказанные системы для перемещения крюка в вертикальной плоскости в заданном направлении требуют, как правило, совмещение отдельных операций с учетом скорости их выполнения, что усложняет действия крановщика, снижает производительность труда.
Задачей изобретения является сокращение числа управляющих воздействий, за счет чего повышается точность перемещения крюка и улучшаются условия труда крановщика.
Поставленная задача в части выполнения способа управления грузоподъемным краном, включающего предварительное определение допустимых значений параметров, характеризующих нагрузку, пространственное положение стрелы, крюка, их запоминание, измерение в процессе работы грузоподъемного крана фактических параметров, сравнение их с допустимыми значениями и последующее формирование сигналов управления электроуправляемыми пропорциональными гидрораспределителями в зависимости от результата этого сравнения, от величины и направления перемещения рукоятки аппарата управления, от выполняемой крановой операции, в котором согласно изобретению перемещение крюка задают сигналами, пропорциональными скоростям изменения вылета и высоты подвеса крюка, а формирование сигналов управления гидрораспределителями происходит в зависимости от результата сравнения заданных и фактических скоростей изменения вылета и высоты подвеса крюка, от параметров ограничения крановых операций, возможности их совмещения.
Поставленная задача в части выполнения системы управления грузоподъемным краном решена за счет того, что в известной системе управления, включающей микропроцессорный прибор безопасности, подключенные к нему аппараты управления, содержащие бесконтактный двухкоординатный датчик положения рукоятки, микроконтроллер, устройство ввода-вывода информации, силовые защищенные ключи-регуляторы тока, датчики нагрузки, угла наклона стрелы, длины стрелы, азимута, длины грузового каната, электроуправляемые пропорциональные гидрораспределители, согласно изобретению аппарат управления выполнен с возможностью задания скорости перемещения крюка в вертикальной плоскости сигналами, пропорциональными скоростям изменения вылета и высоты подвеса крюка, а микроконтроллер выполнен в виде системы автоматического регулирования вылета и высоты подвеса крюка.
Изобретение поясняется прилагаемыми чертежами, где на фиг.1 приведена схема, поясняющая способ управления грузоподъемным краном, установленным на опоры, на фиг.2 - блок-схема системы управления перемещением крюка в вертикальной плоскости, на фиг.3 - алгоритм функционирования формирователя сигналов управления.
Положение крюка грузоподъемного крана удобно определять в цилиндрической системе координат тремя параметрами: вылетом R, углом поворота платформы φ и высотой подвеса крюка Н. В вертикальной плоскости положение крюка определится двумя параметрами R и Н (фиг.1), следовательно, для перемещения крюка в вертикальной плоскости достаточно управлять скоростью изменения вылета VR и скоростью изменения высоты подвеса крюка VH.
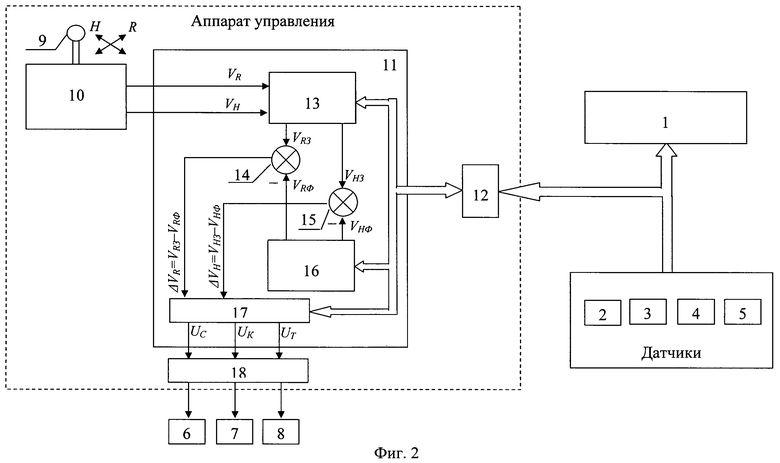
В состав системы управления входят прибор безопасности (1), датчики нагрузки (2), угла наклона стрелы α (3), длины стрелы (4), длины грузового каната (5), электроуправляемые пропорциональные гидрораспределители подъема стрелы (6), подъема крюка (7), выдвижения телескопа (8), аппарат управления, состоящий из рукоятки (9), датчика положения рукоятки (10), микроконтроллера (11), устройства ввода-вывода информации (12). Микроконтроллер (11), выполняющий функции системы регулирования вылета и высоты подвеса крюка, содержит в своем составе схему коррекции (13), схемы сравнения (14) и (15), вычислитель (16), формирователь сигналов управления (17), силовые ключи-регуляторы тока (18).
Сигналы VR и VH управления скоростями изменения вылета и высоты подвеса крюка задаются величиной и направлением перемещения рукоятки аппарата управления (9) (фиг.2) и через датчик положения рукоятки (10) поступают в микроконтроллер (11). Одновременно в микроконтроллер (11) через устройство ввода-вывода информации (12) поступает информация от микропроцессорного прибора безопасности (1) о параметрах ограничения крановых операций, возможности их совмещения, кратности грузового полиспаста и от датчиков нагрузки (2), угла наклона стрелы (3), длины стрелы (4), длины грузового каната (5). Выходные сигналы управления стрелой UC, крюком UK, телескопом UT микроконтроллера (11) поступают на силовые ключи-регуляторы тока (18), которые выдают соответствующие пропорциональные токовые сигналы IC, IK, IT, управляющие гидрораспределителями подъема стрелы (6), подъема крюка (7), выдвижения телескопа (8) соответственно. В микроконтроллере (11) схемой коррекции (13) корректируются значения сигналов VR и VH с учетом информации от прибора безопасности. Скорректированные сигналы VR3 и VH3 поступают на прямые входы схем сравнения (14) и (15) соответственно. Вычислитель (16) по информации датчиков (3), (4), (5) с учетом информации о кратности запасовки грузового полиспаста от прибора безопасности (1) вычисляет значения сигналов, соответствующих фактическим скоростям изменения вылета VRФ и высоты подвеса крюка VHФ, которые поступают на инверсные входы схем сравнения (14) и (15).
На входы формирователя сигналов управления (17), алгоритм функционирования которого приведен на фиг.3, поступает информация от схемы коррекции (13) VR3 и VH3, схем сравнения (14) и (15) ΔVR и ΔVH и от прибора безопасности (1) о параметрах ограничения крановых операций: подъема крюка ПК, опускания крюка ОК, подъема стрелы ПС, опускания стрелы ОС, выдвижения телескопа В∂Т, втягивания телескопа ВmТ. Операция разрешена, если соответствующий параметр равен 1, нулевое значение параметра запрещает выполнение операции. Знак «*» обозначает любое из возможных значений параметра. При сочетаниях параметров ΔVR, ΔVн, ПК, ОК, ПС, ОС, В∂Т, ВmТ, отсутствующих в алгоритме управления, сигналы управления гидрораспределителями не выдаются. Формирователь (17) выдает на выходы UC, UK, UT сигналы управления UR и UH, пропорциональные рассогласованиям ΔVR и ΔVH соответственно. Положительные сигналы UR и UH на выходах UC, UK, UT включают подъем стрелы, подъем крюка и выдвижение телескопа соответственно, отрицательные сигналы -UR и -UH на тех выходах включают опускание стрелы, опускание крюка и втягивание телескопа.
Применение для перемещения крюка в вертикальной плоскости вместо трех управляющих воздействий (подъем-опускание стрелы, подъем-опускание крюка, выдвижение-втягивание телескопа) двумя рукоятками двух управляющих воздействий (изменение вылета и высоты подвеса крюка) одной рукояткой позволяет повысить точность перемещения крюка, улучшить условия труда крановщика.
Учитывая опыт применения двухкоординатных аппаратов управления на кранах КС-5579.2 и КС-5579.3, практическая реализация системы управления не представляется сложной [В.А.Коровин. Комплексная система защиты и управления стрелового грузоподъемного крана. / Коровин В.А., Кретов М.Н., Токарев Д.В., Гераскин С.А., Коровин К.В., Давыдков А.В., Казанцев А.Ф. - Всероссийский информационно-рекламный журнал «Все краны», №02/02, 2006, С.8-11].
Предлагаемая система управления применима и на кранах с решетчатой стрелой. При этом алгоритм функционирования формирователя сигналов управления упрощается, но число управляющих воздействий не сокращается.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2298518C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2008 |
|
RU2381172C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ (ВАРИАНТЫ) И СИСТЕМА БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2396201C1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ И ПОВРЕЖДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2237610C2 |
| УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА С ГРАФИЧЕСКИМ ДИСПЛЕЕМ (ВАРИАНТЫ) | 2006 |
|
RU2326806C1 |
| СПОСОБ НАСТРОЙКИ ЭЛЕКТРОННОГО УСТРОЙСТВА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И ЭЛЕКТРОННОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ С ЕГО РЕАЛИЗАЦИЕЙ | 2006 |
|
RU2326803C2 |
| СПОСОБ УМЕНЬШЕНИЯ РАСКАЧИВАНИЯ ГРУЗА ПРИ ПОДЪЕМЕ СТРЕЛОВЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422354C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2343103C2 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |

Изобретение относится к грузоподъемным механизмам и предназначено для грузоподъемных кранов с телескопической стрелой. Система управления содержит прибор безопасности, аппараты управления, бесконтактный двухкоординатный датчик положения рукоятки, датчики нагрузки, угла наклона стрелы, длины стрелы, азимута, длины грузового каната, электроуправляемые пропорциональные гидрораспределители. В процессе работы грузового крана перемещение крюка в вертикальной плоскости задают сигналами, пропорциональными скоростям изменения вылета и высоты подвеса крюка. Управление гидрораспределителями происходит в зависимости от результата сравнения заданных и фактических скоростей изменения вылета и высоты подвеса крюка, от параметров ограничения крановых операций, возможности их совмещения из условия обеспечения безопасной работы крана. Достигается сокращение числа управляющих воздействий, повышение точности перемещения крюка, улучшение условий труда крановщика. 2 н.п. ф-лы, 3 ил.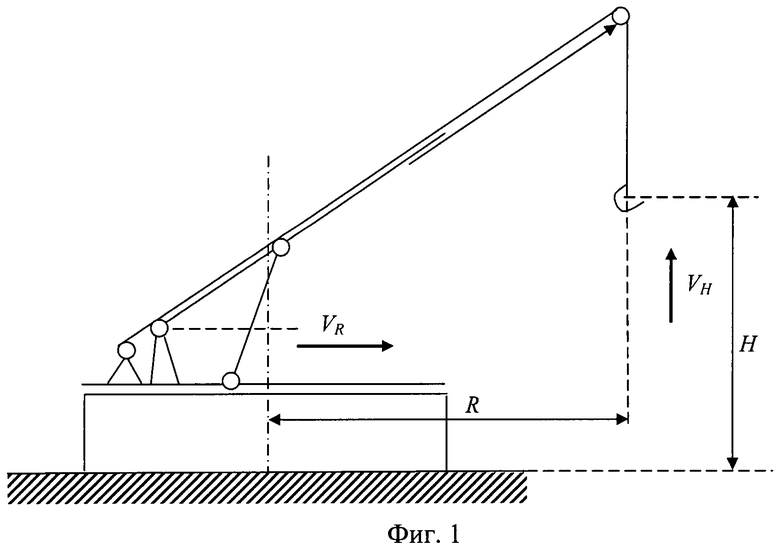
1. Способ управления грузоподъемным краном путем предварительного определения допустимых значений параметров, характеризующих нагрузку, пространственное положение стрелы, крюка, их запоминания, измерения в процессе работы грузоподъемного крана фактических параметров, сравнения их с допустимыми значениями и последующего формирования сигналов управления электроуправляемыми пропорциональными гидрораспределителями в зависимости от результата этого сравнения, от величины и направления перемещения рукоятки аппарата управления, от выполняемой крановой операции, причем эту зависимость предварительно определяют из условия обеспечения безопасной работы грузоподъемного крана и улучшения условий труда крановщика и реализуют в конструкции или в программе работы микропроцессорной системы управления, отличающийся тем, что перемещение крюка в вертикальной плоскости задают сигналами, пропорциональными скоростям изменения вылета и высоты подвеса крюка, а формирование сигналов управления гидрораспределителями происходит в зависимости от результата сравнения заданных и фактических скоростей изменения вылета и высоты подвеса крюка, от параметров ограничения крановых операций, возможности их совмещения из условия обеспечения безопасной работы крана.
2. Система управления грузоподъемным краном, включающая микропроцессорный прибор безопасности, подключенные к нему аппараты управления, содержащие бесконтактный двухкоординатный датчик положения рукоятки, микроконтроллер, устройство ввода-вывода информации, силовые защищенные ключи-регуляторы тока, датчики нагрузки, угла наклона стрелы, длины стрелы, азимута, длины грузового каната, электроуправляемые пропорциональные гидрораспределители, отличающаяся тем, что аппарат управления выполнен с возможностью задания скорости перемещения крюка в вертикальной плоскости сигналами, пропорциональными скоростям изменения вылета и высоты подвеса крюка, а микроконтроллер выполнен в виде системы автоматического регулирования вылета и высоты подвеса крюка.
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2298518C1 |
| Коровин В.А., Кретов М.Н., Токарев Д.В., Гераскин С.А., Коровин К.В., Давыдков А.В., Казанцев А.Ф | |||
| Комплексная система защиты и управления стрелового грузоподъемного крана | |||
| Всероссийский информационно-рекламный журнал «Все краны», май 2006 №02/02 [найдено 20.02.2012] | |||
| - найдено в Интернет: <URL: | |||

