Изобретение относится к области машиностроения, а именно к устройствам для объектов использования атомной энергии (ОИАЭ), и может быть использовано для дистанционной укупорки путем обжатия крышки на бочке с радиоактивными отходами (РАО), как жидкими, так и твердыми РАО и перемещения укупоренной заполненной бочки с РАО, а также для перемещения незаполненной бочки без крышки.
При эксплуатации АЭС образуются различные виды радиоактивных отходов, для размещения и хранения которых часто используется грузовая бочка (далее - бочка). После помещения РАО в бочку требуется укупорить бочку крышкой и переместить бочку на дальнейшее хранение.
Изобретение может быть использовано для дистанционного обжатия крышек на бочках с РАО как отдельно стоящих, так и размещаемых внутри контейнеров для бочек.
Бочка состоит из корпуса и крышки. Корпус представляет собой круглую обечайку с приваренным плоским днищем. В верхней части обечайки корпуса бочки выполнена кольцевая горловина. Крышка представляет собой цилиндрическую обечайку небольшой высоты с плоским днищем и отбортовкой. Материал крышки и деталей корпуса - сталь. В отбортовке крышки выполнены разрезы для получения лепестков, которые при укупорке обжимаются вокруг горловины корпуса бочки, обеспечивая укупоривание внутреннего пространства бочки. Для обеспечения защиты персонала от радиоактивного излучения, вызываемого РАО вне защитных помещений, заполненная РАО укупоренная бочка транспортируется в защитном контейнере для бочки. Контейнер представляет собой цилиндрический толстостенный металлический сосуд с крышкой, сдвигаемой в сторону, оснащенный грузозахватными приспособлениями (цапфами).
В настоящее время на ОИАЭ для обжатия крышки на бочке с РАО используются стационарно размещаемые устройства для обжатия крышки, загрузка бочек в такие устройства происходит при помощи тележек или транспортеров, а для дальнейшего перемещения укупоренной бочки с РАО используются грузоподъемные механизмы. Стационарно размещаемые устройства для обжатия крышки на бочке не позволяют укупоривать заполненные РАО бочки внутри контейнера для бочки и требуют перемещения бочки на специально отведенное место обжатия крышки.
В настоящее время известны следующие технические решения:
- захват (патент RU 21194 U1, 10.04.2001, B65G 65/24, опубл. 27.12.2001 Бюл. №36);
- устройство для укупоривания емкостей (варианты) (патент RU 66323 U1, 24.01.2007, В67В 3/14, опубл. 10.09.2007 Бюл. №25);
- механизм установки и удержания крышки контейнера (пенала) с отработавшим ядерным топливом (патент RU 2456691 C1, 17.06.2011, G21F 5/12, опубл. 20.07.2012 Бюл. №20);
- устройство для укупорки бочек (авторское свидетельство SU 1172707 А, 16.01.84, В27Н 5/10, опубл. 15.08.85 Бюл. №30);
- гидравлический пресс для компактирования твердых отходов в бочке и распрессовки заполненной бочки с крышкой в брикет (патент RU 2453437 C2, 21.04.2010, В30В 11/00, В30В 1/32, G21F 9/36, опубл. 20.06.2012 Бюл. №17);
- gripper for remotely-operated gripping in transport of barrels or containers (патент DE 3833537 A1, 01.10.1988, G21F 5/14, опубл. 05.04.1990).
Устройства, описанные в патентах RU 21194 U1, RU 2456691 C1, DE 3833537 A1, не предназначены для укупоривания бочек.
Устройства, описанные в патентах RU 66323 U1, SU 1172707, RU 2453437 C2 (в части механизма съема и обжима) не предназначены для использования в качестве грузоподъемных устройств.
По результатам патентного поиска дистанционно-управляемых устройств для укупорки путем обжатия крышки на бочке с радиоактивными отходами (в том числе, бочки, находящейся в контейнере для бочки), с одновременной возможностью использования в качестве грузоподъемного устройства в настоящее время в патентном фонде не зарегистрировано. Таким образом, заявляемое изобретение аналогов не имеет.
Технической задачей, решаемой предлагаемым изобретением, является разработка дистанционно-управляемого устройства для укупорки бочки с РАО путем обжатия лепестков крышки бочки по кольцевой горловине корпуса бочки (в том числе, бочки, находящейся в контейнере для бочки), которое объединяет в себе функции устройства обжатия крышки на бочке и грузоподъемного устройства для дистанционного подъема, перемещения и установки бочки (далее - устройство).
Как решение задачи, позволяющее достигнуть эффекта с указанными техническими характеристиками, предлагается конструкторское решение - устройство, которое устанавливается на бочку сверху дистанционно. Устройство устанавливается на отдельно стоящую бочку, или на бочку, находящуюся в контейнере для бочки и центрируется по крышке бочки за счет кольца направляющего в составе устройства. Устройство может использоваться как в специально отведенном помещении, так и в месте непосредственного сбора РАО в бочку. Для работы устройства не требуются дополнительные перемещения и ориентация бочки, а, следовательно, и не требуются дополнительные устройства.
При использовании предлагаемого устройства достигаются следующие технические результаты:
- снижение радиационного воздействия на оператора ОИАЭ при заполнении, укупорке, подъеме, перемещении и установки бочки с РАО путем применения дистанционного управления устройством;
- применение устройства позволяет сократить длительность процесса укупорки, подъема, перемещения и установки бочки с РАО;
- объединение устройства укупоривания бочки и грузоподъемного устройства в одном устройстве обеспечивает минимальные затраты на оборудование для обращения с РАО при выполнении операций по: обжатию крышки на бочке; выгрузке укупоренной бочки из контейнера для бочки; снятию/установке укупоренной бочки с тележек, транспортеров, конвейеров; перемещению и установке укупоренной бочки в контейнеры, на хранение;
- устройство так же позволяет выполнять операции по подъему, перемещению и установке для незаполненной бочки без крышки.
Сущность изобретения. Устройство для обжатия крышки на бочке представляет собой стальную конструкцию, состоящую из неподвижной корпусной части и системы движущихся элементов. К неподвижным элементам устройства относится: корпус, к которому присоединен электрический привод с механизмом дублирования, управляемым маховиком и плита верхняя. К плите верхней через симметрично по окружности расположенные тяги присоединена грузовая проушина для возможности подвеса устройства на гаке крана. Количество тяг выбирается в зависимости от конфигурации привода. Количество тяг позволяет равномерно передать веса устройства и бочки на гак крана и обеспечить свободный доступ для обслуживания к элементам электрического привода.
К нижней части плиты верхней через неподвижные стойки жестко неподвижно присоединена плита нижняя, на которой жестко неподвижно закреплено кольцо направляющее.
К движущимся элементам устройства относятся: замки дугообразные с шарнирами; винт, соединенный с электрическим приводом; рычаги с шарнирами; гайка, установленная в плите опорной.
Замки дугообразные в своей центральной части закрепленные через шарниры на плите нижней, с верхней стороны замки дугообразные через шарнирные соединения с рычагами и шарнирные соединения рычагов соединены с плитой опорной. В плите опорной выполнены отверстия, через которые проходят неподвижные стойки. На плите опорной установлена гайка.
Габаритный размер открытого устройства должен быть меньше внутреннего диаметра контейнера и уменьшается при увеличении количества замков. Максимальное количество замков не ограничено и определяется исходя из конструктивно-технологических возможностей. Например, устройство с восьмью симметрично закрепленными на плите нижней и плите опорной дугообразными замками обеспечивает максимально синхронное распределение усилия обжатия крышки на бочке и удержания бочки, как с крышкой, так и без крышки, при осуществлении функции обжатия крышки на бочке и грузоподъемного использования устройства.
Принцип работы устройства. Электрический привод вращает винт, который передает движение на гайку преобразовывая вращение в возвратно-поступательное движение присоединенной к гайке плите опорной. В плите опорной выполнены отверстия, через которые проходят неподвижные стойки. Рычаги шарнирно соединены с плитой опорной и замками дугообразными и передают поступательное движение с плиты опорной на замки дугообразные. При помощи замков дугообразных осуществляется обжатие лепестков крышки бочки по кольцу обечайки корпуса бочки и удержание бочки устройством при подъеме и перемещении заполненной РАО укупоренной бочки.
Операции по точному позиционированию устройства на бочку, обжатию и раскрытию устройства происходят дистанционно путем управления краном, на который навешено устройство и управлением работы электрического привода.
Работа устройства с незаполненной бочкой без крышки является дополнительной возможностью изобретения.
Форма и расположение замков дугообразных позволяет равномерно и одновременно обжимать все лепестки крышки по кольцу обечайки, а также равномерно распределять вес бочки на замки дугообразные при операциях по перемещению. Предложенная конструкция замков дугообразных позволяет перемещать незаполненные бочки без крышки без деформации корпуса бочки.
Использование передачи винт-гайка для перемещения плиты опорной исключает самопроизвольное раскрытие замков дугообразных при внезапном прекращении подачи электроэнергии и обеспечивает безопасность при обращении с РАО, исключая возможность падения бочки при перемещении.
На устройстве установлен электрический привод с механизмом дублирования, что позволяет вращением маховика привода открыть замки дугообразные в ситуации прекращения подачи электроэнергии.
Устройство для обжатия крышки на бочке более подробно поясняется ниже на фиг. 1-5:
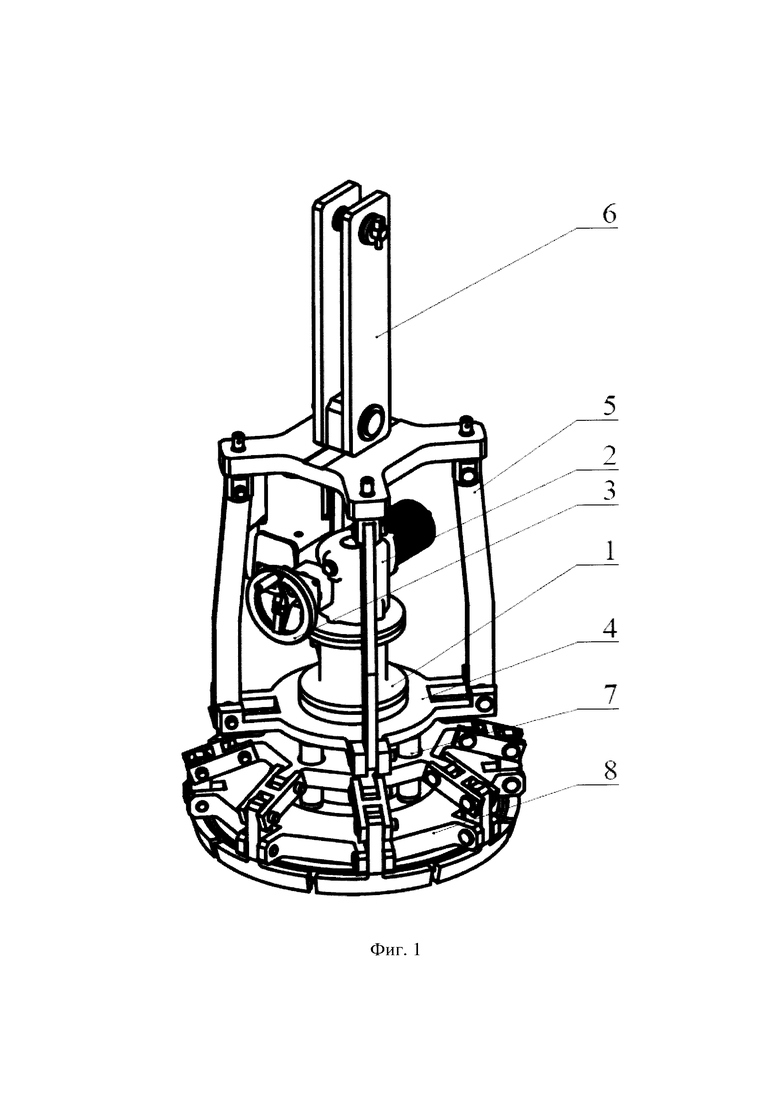
фиг. 1 - вид общий устройства для обжатия крышки на бочке;
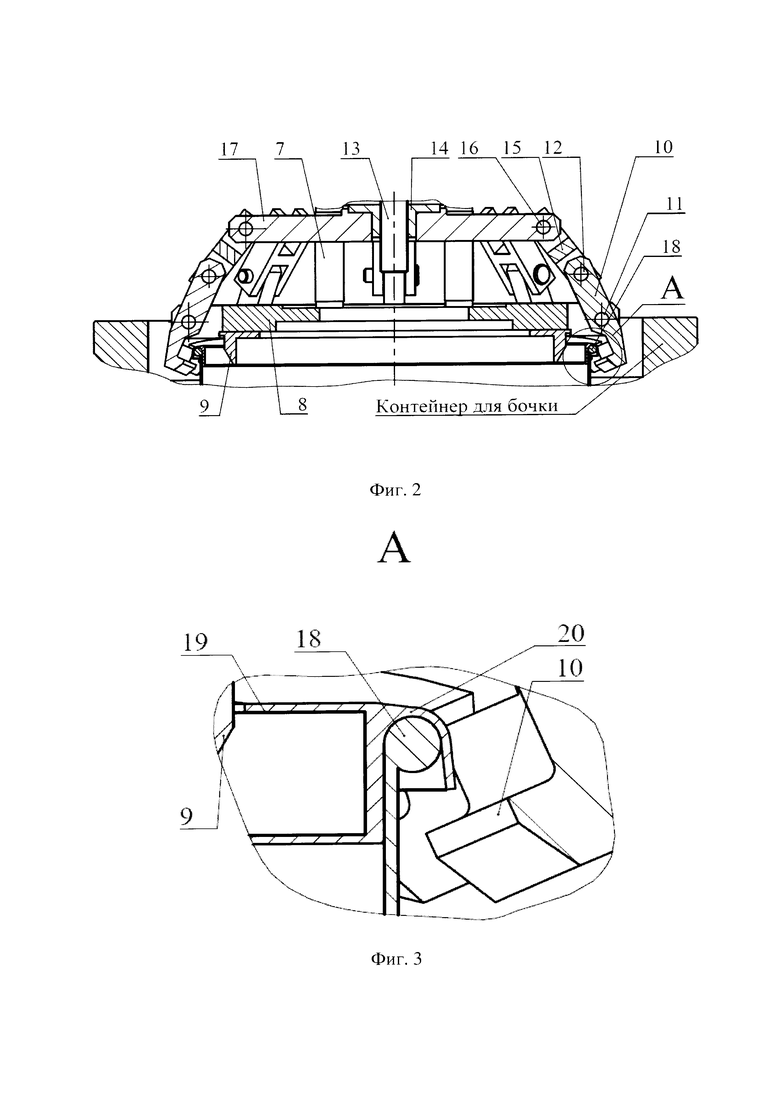
фиг. 2 - механизм устройства для обжатия крышки на бочке, замки дугообразные в открытом положении;
фиг. 3 - замки дугообразные и элементы бочки до обжатия крышки;
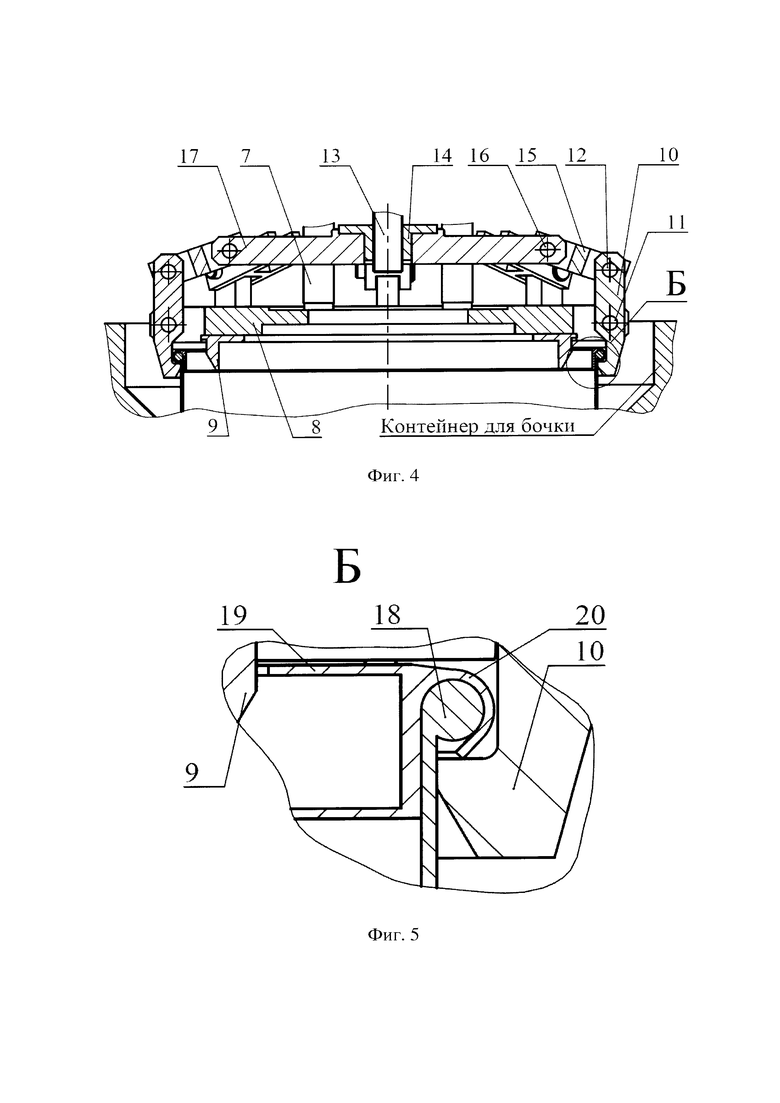
фиг. 4. - механизм устройства для обжатия крышки на бочке, замки дугообразные в закрытом положении;
фиг. 5 - замки дугообразные и элементы бочки после обжатия крышки.
Устройство для обжатия крышки на бочке (фиг. 1) представляет собой стальную конструкцию, состоящую из неподвижной корпусной части и системы движущихся элементов. К неподвижным элементам устройства относится корпус (1), к которому присоединен электрический привод (2) с механизмом дублирования, управляемым маховиком (3) и плита верхняя (4). К плите верхней через симметрично по окружности расположенные тяги (5) присоединена грузовая проушина (6) для возможности подвеса устройства на гаке крана. К нижней части плиты верхней (4) (фиг. 1, 2) через неподвижные стойки (7) жестко неподвижно присоединена плита нижняя (8), на которой жестко неподвижно закреплено кольцо направляющее (9).
К движущимся элементам устройства относятся: замки дугообразные (10) с шарнирами (11) и (12); винт (13), соединенный с электрическим приводом (2); гайка (14); рычаги (15) с шарнирами (16); плита опорная (17) в которой установлена гайка (14).
Замки дугообразные (10) в своей центральной части закреплены через шарниры (11) на плите нижней (8), с верхней стороны через шарниры (12), рычаги (15) и шарниры (16) соединены с плитой опорной (17). В плите опорной (17) выполнены отверстия, через которые проходят неподвижные стойки (7). На плите опорной (17) установлена гайка (14).
Принцип работы устройства для обжатия крышки на бочке.
Оператор дистанционно с помощью крана подводит устройство с открытым замками дугообразными (10) к заполненной бочке с РАО. На корпусе бочки имеется кольцевая горловина (18). Бочка накрыта крышкой (19) с лепестками (20) (фиг. 2). Оператор дистанционно с помощью крана опускает устройство на бочку с крышкой. Кольцо направляющее (9) контактирует с крышкой бочки (19) (увеличено показано на фиг. 3), что позволяет установить устройство в рабочее положение относительно бочки с крышкой.
Оператор включает электрический привод (2) (фиг. 1, фиг. 4). Электрический привод (2) вращает винт (13), который передает движение на гайку (14), преобразовывая вращение в поступательное движение присоединенной к гайке (14) плиты опорной (17). Плита опорная (17) движется вниз. Через шарниры (16) поступательное движение вниз плиты опорной (17) передается на рычаги (15). Рычаги (15) через шарниры (12) соединены с верхней частью замков дугообразных (10). В свою очередь замки дугообразные (10) в своей центральной части, через шарниры (11) соединены с неподвижной плитой нижней (8). Таким образом, движение и усилие от плиты опорной (17) передается на рычаги (15), которые толкают верхнюю часть замков дугообразных (10) от центральной оси симметрии устройства. Замки дугообразные (10) под действием движения передаваемого с рычагов (15) начинают поворачиваться вокруг шарниров (11), при этом нижние дугообразные части замков (10) движутся к центральной оси симметрии устройства и передают усилие на лепестки крышки (20), деформируя и прижимая их к кольцевой горловине (18) (фиг. 4). Лепестки крышки (20) плотно прижимаются к кольцевой горловине (18) обеспечивая укупорку бочки с РАО (увеличенно показано на фиг. 5). При достижении крайнего положения подвижных элементов устройство считается закрытым. Не открывая замки дугообразные (10) оператор дистанционно с помощью крана производит операции по подъему и перемещению заполненной укупоренной бочки с РАО.
Работа устройства с незаполненной бочкой без крышки является дополнительной возможностью изобретения.
Выполнение операций по перемещению незаполненной бочки без крышки осуществляется следующим образом. Оператор дистанционно с помощью крана подводит устройство к бочке и включает электрический привод (2) для открытия замков дугообразных (10) и располагает устройство над бочкой, таким образом, чтобы бочка оказалась между открытыми замками дугообразными (10), а плита нижняя (8) над кольцевой горловиной (18). Оператор дистанционно включает электрический привод (2) и опускает устройство на боку. Оператор включает электрический привод (2) для закрытия замков дугообразных (10), при этом геометрия замков дугообразных при достижении крайнего положения подвижных элементов устройства в положении закрыто, не позволит замкам дугообразным деформировать бочку. С помощью крана осуществляется перемещение устройства с удерживаемой незаполненной бочкой в позицию назначения. Оператор дистанционно открывает замки дугообразные (10), путем включения электрического привода (2).
Работа устройства при аварийном отключении электропитания заключается в возможности управления электрическим приводом (2) путем вращения маховика (3), расположенного на корпусе электрического привода (2). В случае аварийного отключения электропитания все подвижные элементы устройства сохраняют свое положение. В случае отключения электропитания в момент переноса бочки устройством необходимо средствами управления крана переместить и опустить устройство с бочкой в требуемую или безопасную позицию, а далее при помощи оператора вращением маховика (3) перевести устройство в положение открыто (фиг. 2)
Предложенное дистанционно-управляемое устройство для обжатия крышки на бочке совмещает функции по укупориванию бочки и перемещению бочки с РАО и обеспечивает: безопасность оператора; снижает трудоемкость процесса обращения с РАО; обеспечивает минимальные затраты на оборудование для обращения с РАО.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ДЛЯ РОЗЛИВА И УКУПОРКИ НАПИТКОВ В БУТЫЛКИ | 2004 |
|
RU2266861C2 |
| УКУПОРОЧНОЕ УСТРОЙСТВО | 2009 |
|
RU2407696C1 |
| АВТОМАТИЗИРОВАННАЯ ПОТОЧНАЯ ЛИНИЯ ДЛЯ УПАКОВКИ РАДИОАКТИВНЫХ ОТХОДОВ | 1992 |
|
RU2012081C1 |
| Устройство для ручной укупорки стеклянных консервных банок жестяными крышками | 1986 |
|
SU1421684A1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС ДЛЯ КОМПАКТИРОВАНИЯ ТВЕРДЫХ ОТХОДОВ В БОЧКЕ И РАСПРЕССОВКИ ЗАПОЛНЕННОЙ БОЧКИ С КРЫШКОЙ В БРИКЕТ | 2010 |
|
RU2453437C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Устройство для взвешивания, укупорки и маркировки бочек | 1953 |
|
SU99700A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| КРОНЕН-ПРОБКА ДЛЯ УКУПОРКИ БУТЫЛОК С ЯЗЫЧКОМ ДЛЯ ОТКРЫВАНИЯ | 1996 |
|
RU2086487C1 |
| УСТРОЙСТВО ДЛЯ ВАКУУМИРОВАНИЯ И УКУПОРИВАНИЯ ВАКУУМНЫХ ПРОБИРОК | 2015 |
|
RU2590995C1 |
Изобретение относится к области машиностроения, а именно к устройствам для объектов использования атомной энергии (ОИАЭ), и может быть использовано для дистанционной укупорки путем обжатия крышки на бочке с радиоактивными отходами (РАО) как жидкими, так и твердыми РАО и перемещения укупоренной бочки. Устройство для обжатия крышки на бочке (далее - устройство) представляет собой дистанционно-управляемую стальную конструкцию, устанавливаемую сверху на накрытую крышкой заполненную бочку с РАО. Конструкция устройства состоит из корпуса, к которому присоединен электрический привод с механизмом дублирования управляемым маховиком, плиты верхней, плиты нижней. К плите верхней через симметрично по окружности расположенные тяги присоединена грузовая проушина. К нижней части плиты верхней через неподвижные стойки жестко неподвижно присоединена плита нижняя. На нижней плите неподвижно закреплено кольцо направляющее. На плите нижней через шарнирные соединения в своей центральной части закреплены замки дугообразные. Верхняя часть замков дугообразных соединена с плитой опорной. В плите опорной выполнены отверстия, через которые проходят неподвижные стойки. Устройство обеспечивает безопасность оператора, снижает трудоемкость процесса обращения с РАО. 1 з.п. ф-лы, 5 ил.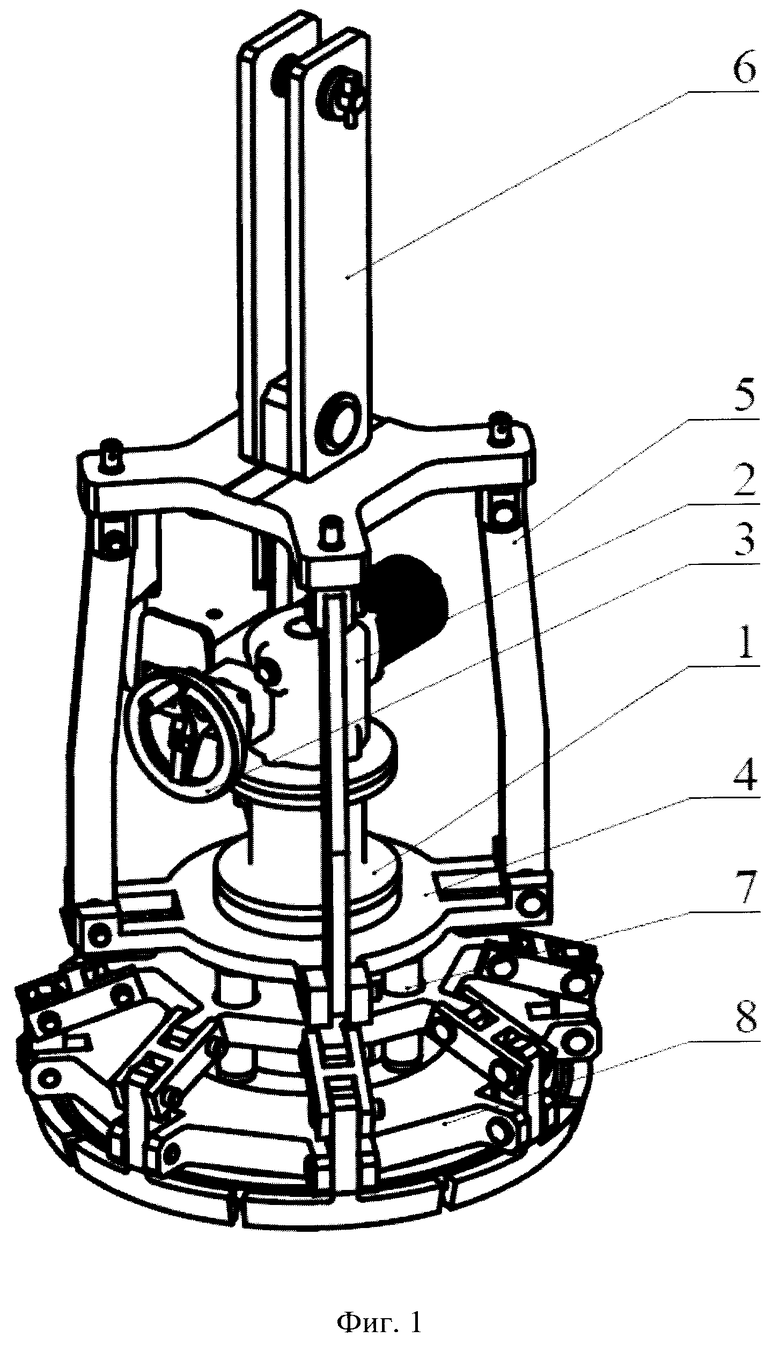
1. Устройство для обжатия крышки на бочке (далее - устройство), представляющее собой дистанционно-управляемую стальную конструкцию применяемую для укупорки путем обжатия крышки на бочке, заполненной радиоактивными отходами (РАО), и перемещения укупоренной бочки; устройство устанавливается сверху на накрытую крышкой заполненную бочку с РАО, при этом бочка с крышкой может находиться как в защитном контейнере, так и отдельно стоять в помещении в месте непосредственного сбора отходов; конструкция устройства состоит из корпуса, к которому присоединен электрический привод с механизмом дублирования, управляемым маховиком, применяемым в случае аварийного отключения электропитания устройства; плиты верхней, к плите верхней через симметрично по окружности расположенные тяги присоединена грузовая проушина для возможности подвеса устройства на гаке крана, количество тяг выбирается в зависимости от конфигурации привода и количество тяг позволяет равномерно передать веса устройства и бочки на гак крана при осуществлении функции по перемещению бочки и обеспечить свободный доступ для обслуживания к элементам электрического привода; к нижней части плиты верхней через неподвижные стойки жестко неподвижно присоединена плита нижняя, на которой жестко неподвижно закреплено кольцо направляющее, которое контактирует с крышкой бочки, обеспечивая установку устройства в рабочее положение относительно бочки с крышкой; на плите нижней через шарнирные соединения в своей центральной части закреплены замки дугообразные, верхняя часть замков дугообразных через шарнирные соединения с рычагами соединена с плитой опорной; в плите опорной выполнены отверстия, через которые проходят неподвижные стойки; габаритный размер открытого устройства должен быть меньше внутреннего диаметра защитного контейнера; количество замков дугообразных не ограничено и определяется исходя из конструктивно-технологических возможностей.
2. Устройство по п. 1, отличающееся тем, что устройство исполнено с восьмью дугообразными замками для обеспечения максимально синхронного распределения усилия обжатия и удержания.
| Устройство для разливки чугуна из доменной печи | 1930 |
|
SU21194A1 |
| Способ получения растворимых в воде диазоаминосоединений | 1945 |
|
SU66323A1 |
| Захват для бочек к погрузчику | 1987 |
|
SU1458311A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ЦИЛИНДРИЧЕСКИХ И БОЧКООБРАЗНЫХ ГРУЗОВ | 0 |
|
SU367038A1 |
| Приспособление для загибания бортов металлических ободьев | 1929 |
|
SU17171A1 |
| DE 4042384 C2, 14.06.1995. | |||
