Область техники
Настоящее изобретение относится к способу и устройству для обработки грузов и может быть использовано в производственных, торговых, логистических и иных предприятиях, работающих с паллетированными грузами и товарами, для приведения паллет в «прямое» и «транспортное положение».
Уровень техники
В рамках изучения прикладных проблем было установлено, что подавляющее большинство производственных, торговых, логистических и иных предприятий, работают с паллетированными грузами и товарами. Продукция, производимая или перерабатываемая предприятиями, размещается на паллетах. Паллет - транспортная тара, специально предназначенная для перемещения с помощью вилочного погрузчика или другого напольного транспорта, которая имеет жесткую площадку и место, достаточное для создания укрупненной грузовой единицы, используемая в качестве основания для сбора, складирования, перегрузки и перевозки грузов. https://ru.wikipedia.org/wiki/%D0%9F%D0%BE%D0%B4%D0%B4%D0%BE%D0%BD
Паллет чаще всего изготавливаются из дерева, реже - из пластика и других материалов. В настоящее время в мире существует несколько стандартов, регламентирующих типы и размеры паллет. Свои стандарты существуют в Европе, США и многих других странах. В России применяются два основных стандарта паллет - 800*1200 мм «Евро-поддон», «EUR/EPAL» и 1000*1200 мм «FIN-паллет». Кроме того, применяются и нестандартные размеры. Оборот паллет на крупных предприятиях измеряется десятками и сотнями тысяч штук в месяц. Сам по себе деревянный паллет - относительно дешевый товар, он легкий и объемный, и его транспортировка составляет большую часть его себестоимости для любого предприятия. Для снижения стоимости перевозки, паллет складывают один прямо / второй перевернутый как представлено на Фиг. 2. В таком же виде, для экономии пространства, осуществляется их хранение. При высоте паллета 150 мм в стопке 2,5 м - высота кузова грузового автомобиля можно перевезти стопку из 16 прямостоящих паллет или 25 перевернутых паллет, таким образом, выгода составляет более 50%. С другой стороны, для использования паллет должен быть приведен в прямое положение, как показано на Фиг. 3. Целью изобретения является устранение, среди прочего, вышеуказанных недостатков существующих решений. Более конкретно, целью изобретения является создание усовершенствованного способа и устройства для безопасного перемещения паллет при существенном сокращении ручного труда, времени выполнения работ. На данный момент из уровня техники неизвестен механизм или какое-либо средство для приведения паллет в прямое -«рабочее» и транспортное положение - «прямой-перевернутый». В настоящее время все подобные работы на предприятиях осуществляются вручную. При современном высоком уровне автоматизации производства и складской логистики ручной погрузочно-разгрузочный процесс при обработке паллет замедляет общую производительность труда, является небезопасным способом перемещения паллет. Таким образом, появилась необходимость в создании безопасного, недорогого и простого способа и устройства, с помощью которых возможно переместить паллет в прямое - «рабочее» и транспортное положение - «прямой-перевернутый», позволяющих исключить ручной труд.
Раскрытие изобретения
Поставленная задача решается тем, что устройство для переворачивания паллет составляет паллет из стопки «один прямо, «второй перевернутый» в стопку «все прямо» и из стопки «все прямо» в стопку «один прямо, «второй перевернутый».
Технический результат достигается за счет создания устройства и способа, позволяющих упростить выполнение работы на предприятии при перемещении паллет из стопки «один прямо, «второй перевернутый» в стопку «все прямо» и из стопки «все прямо» в стопку «один прямо, «второй перевернутый».
Техническая реализация предлагаемого устройства и способа позволила не только уменьшить износ, повреждение и поломку паллет вследствие неаккуратного обращения, но и увеличить производительность труда. Таким образом достигаемый технический эффект заключается в упрощении работы, увеличении производительности, снижении травмоопасности на производстве.
Краткое описание чертежей
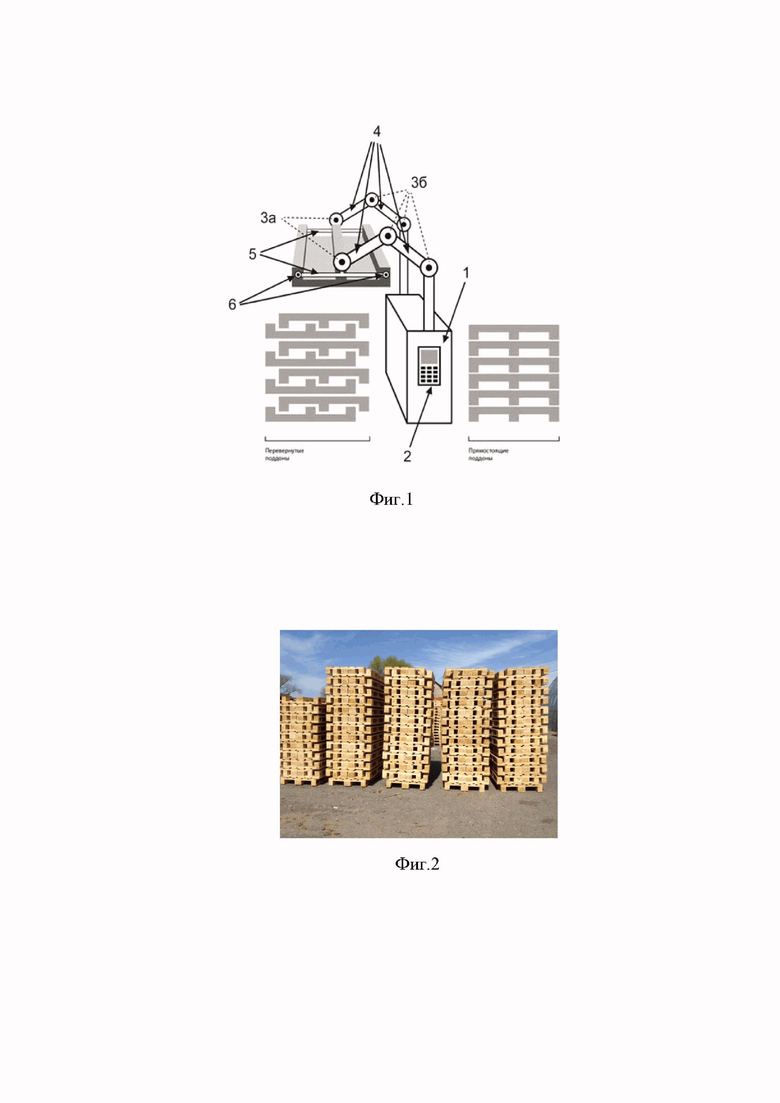
На Фиг. 1 представлен общий вид устройства для переворачивания паллет;
На Фиг. 2 представлены паллеты, сложенные способом «один прямо», «второй перевернутый»;
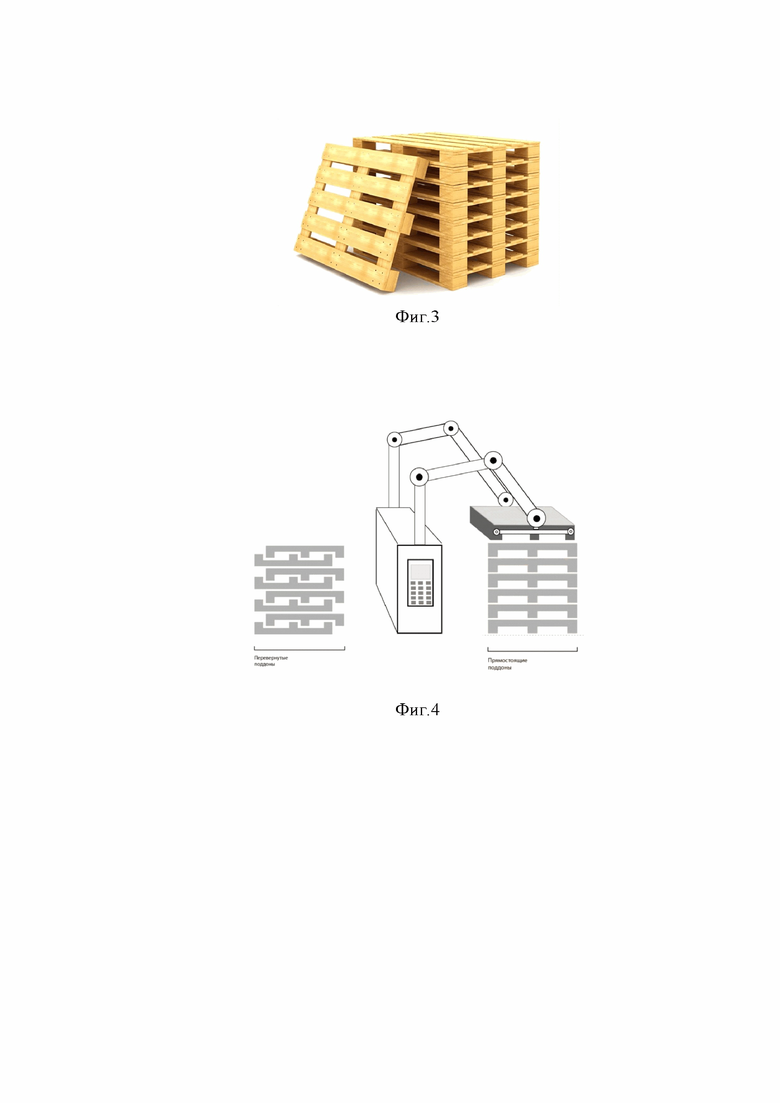
На Фиг. 3 представлены паллеты, сложенные способом «все прямо»;
На Фиг. 4 представлено устройство, демонстрирующее алгоритм перемещение паллет из прямого положения в транспортное. Захват паллет;
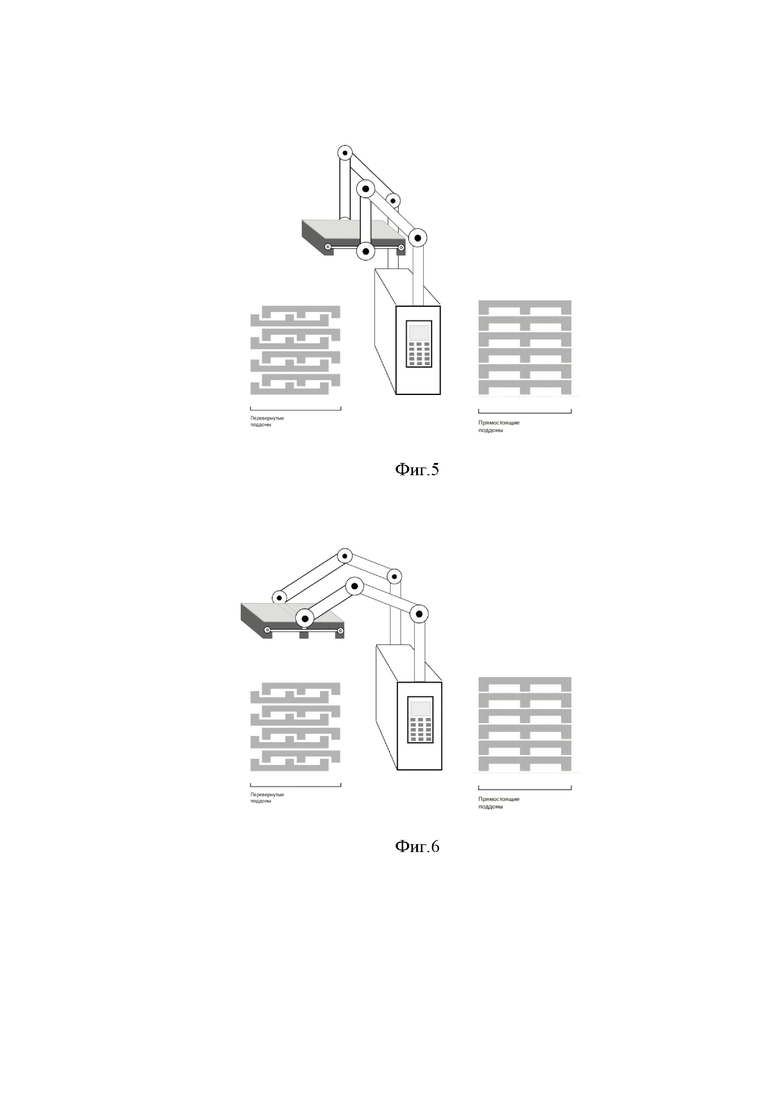
На Фиг. 5 представлено устройство, демонстрирующее перемещение паллет из прямого положения в транспортное. Перемещение паллет без переворачивания;
На Фиг. 6 представлено устройство, демонстрирующее перемещение паллет из прямого положения в транспортное. Перенос паллет;
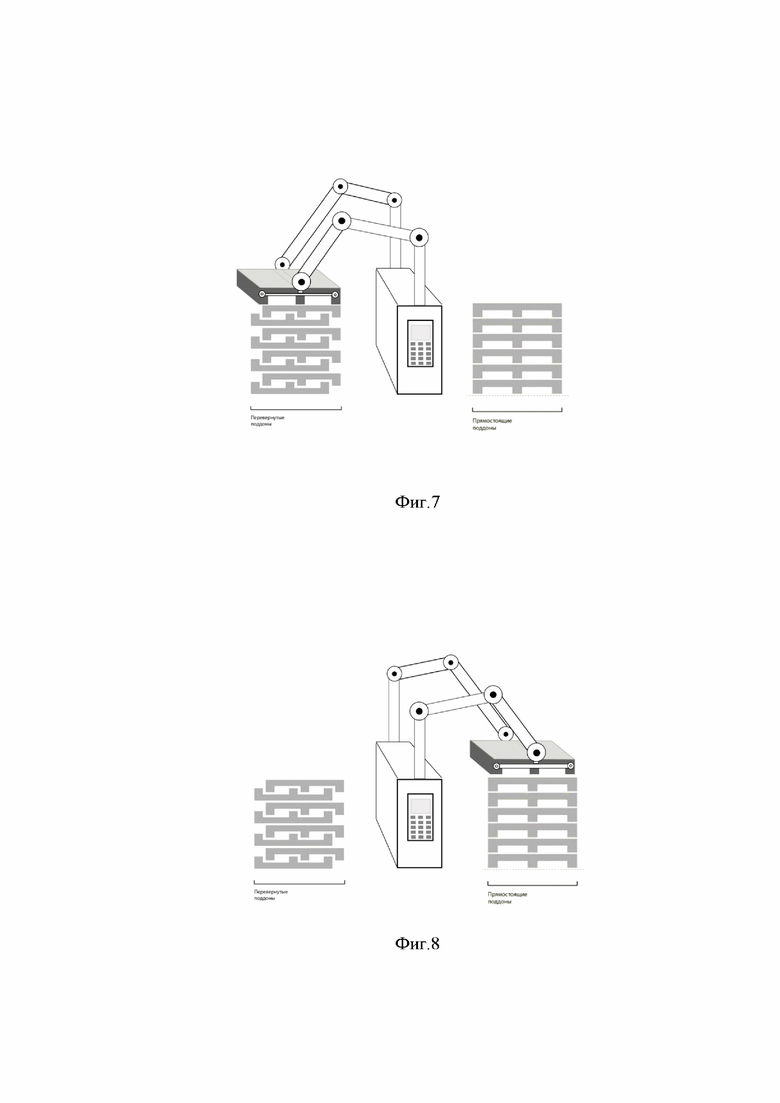
На Фиг. 7 представлено устройство, демонстрирующее перемещение паллет из прямого положения в транспортное. Укладывание паллет;
На Фиг. 8 представлено устройство, демонстрирующее перемещение паллет из прямого положения в транспортное. Захват паллет,
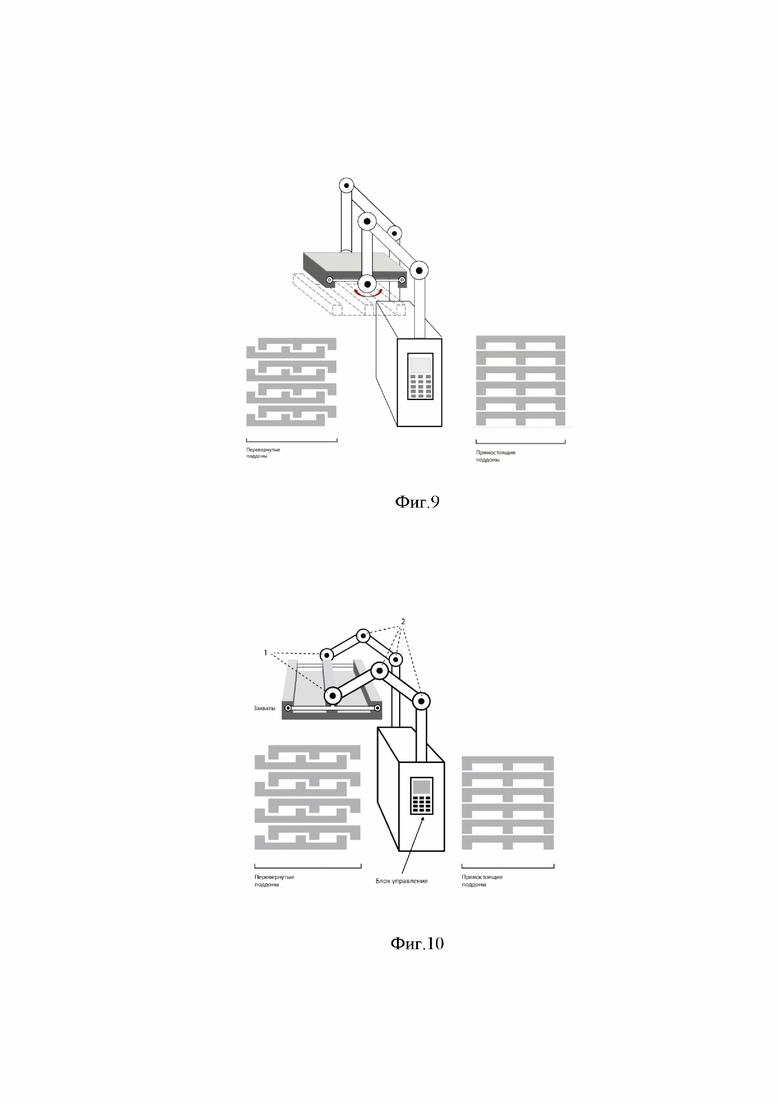
На Фиг. 9. представлено устройство, демонстрирующее перемещение паллет из прямого положения в транспортное. Переворачивание паллет;
На Фиг. 10. представлено устройство, демонстрирующее перемещение паллет из прямого положения в транспортное. Перенос паллет;
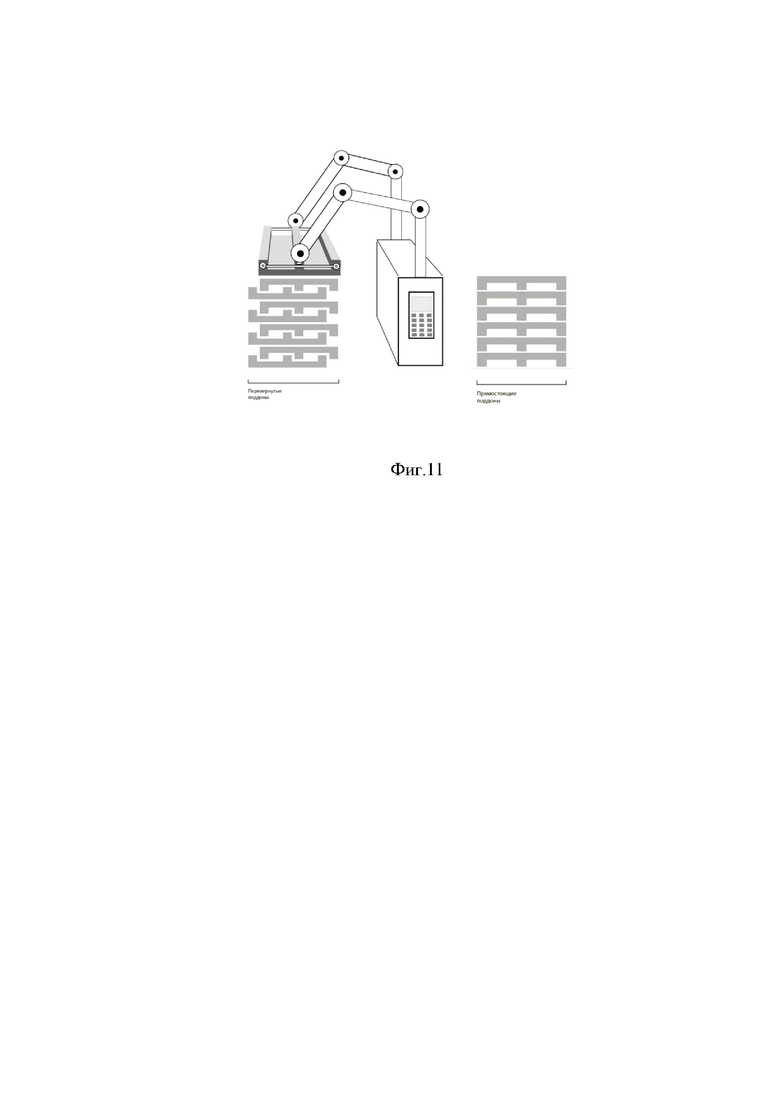
На Фиг. 11 представлено устройство, демонстрирующее перемещение паллет из прямого положения в транспортное. Укладывание паллет;
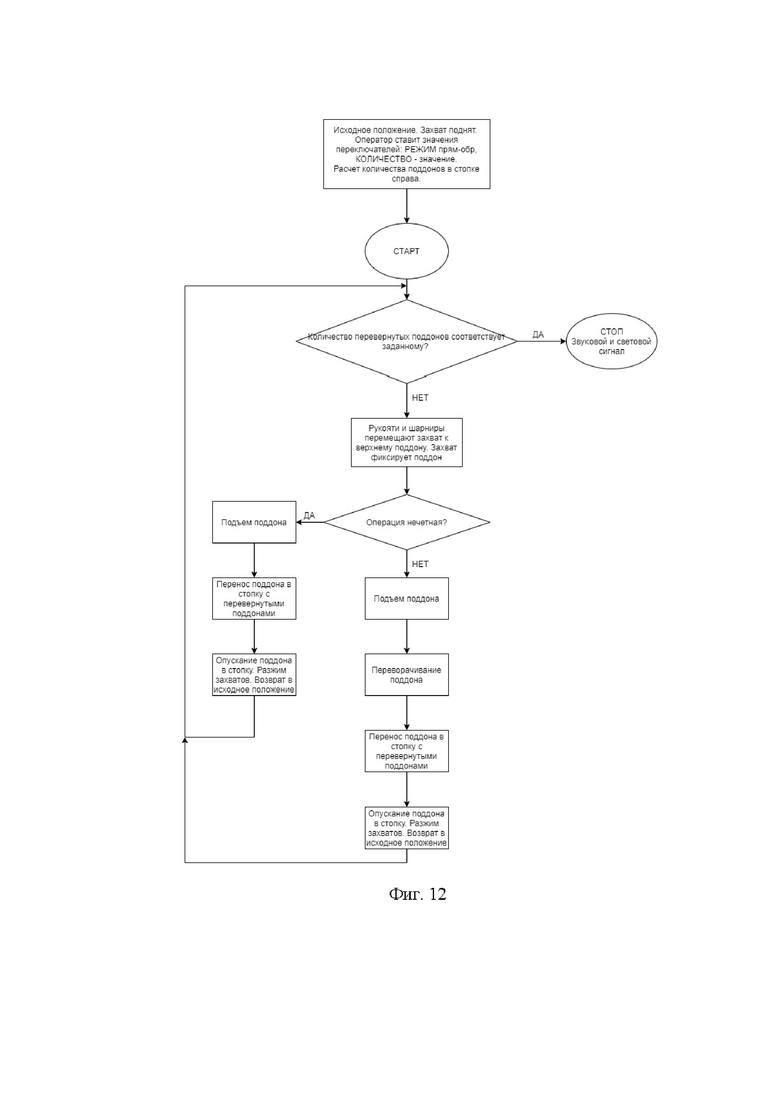
На Фиг. 12 представлен алгоритм работы устройства при обработке паллет из прямого положения в транспортное;
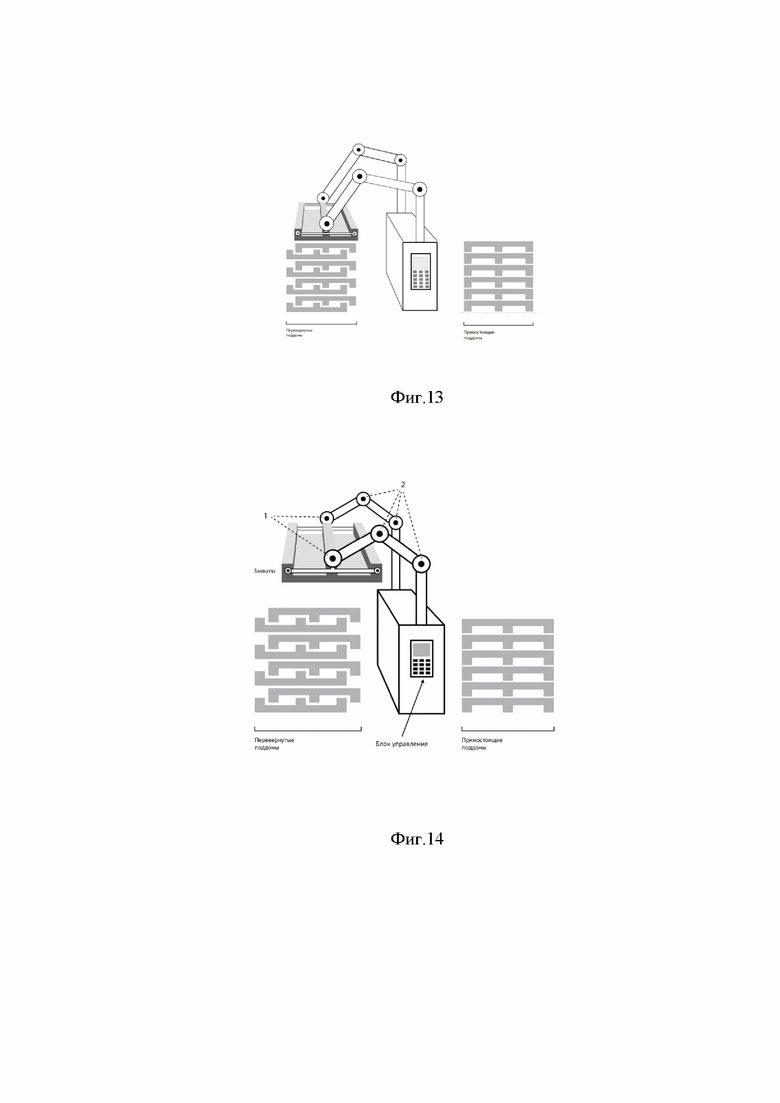
На Фиг. 13 представлено устройство, демонстрирующее перемещение паллет из транспортного положения в прямое. Захват перевернутого паллета;
На Фиг. 14 представлено устройство, демонстрирующее алгоритм перемещения паллет из транспортного положения в прямое. Перемещение паллет;
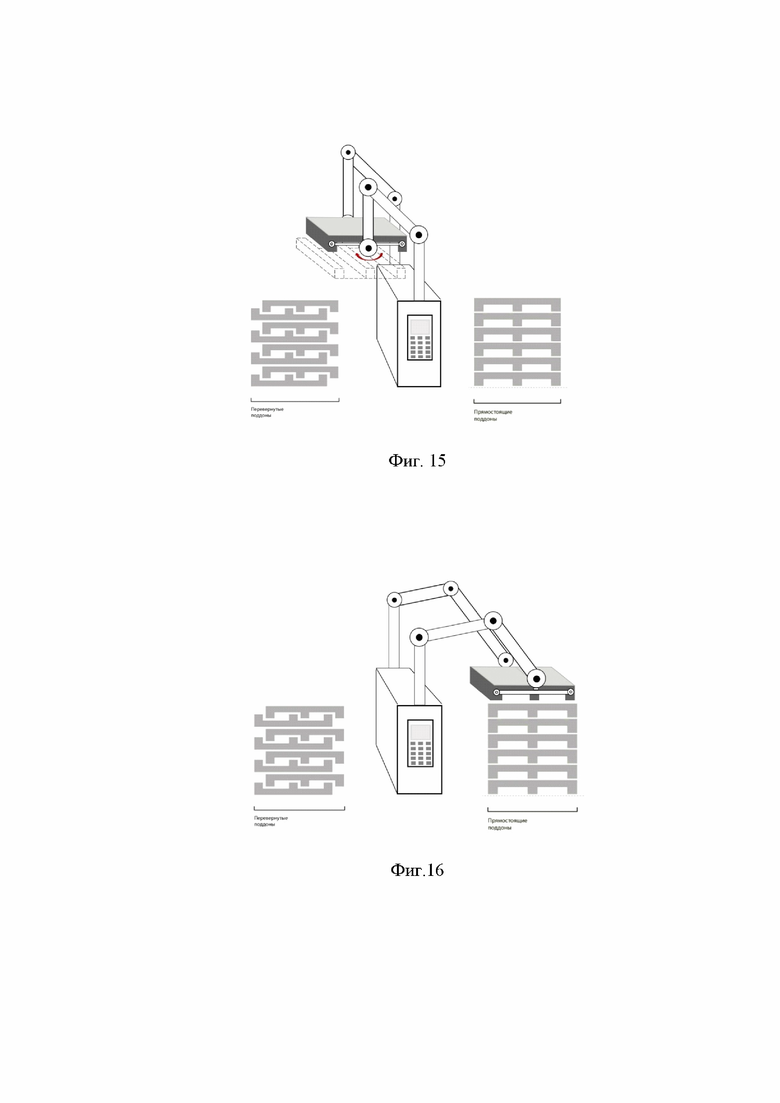
На Фиг. 15 представлено устройство, демонстрирующее алгоритм перемещения паллет из транспортного положения в прямое. Переворачивание паллет;
На Фиг. 16 представлено устройство, демонстрирующее алгоритм перемещения паллет из транспортного положения в прямое. Укладывание паллет;
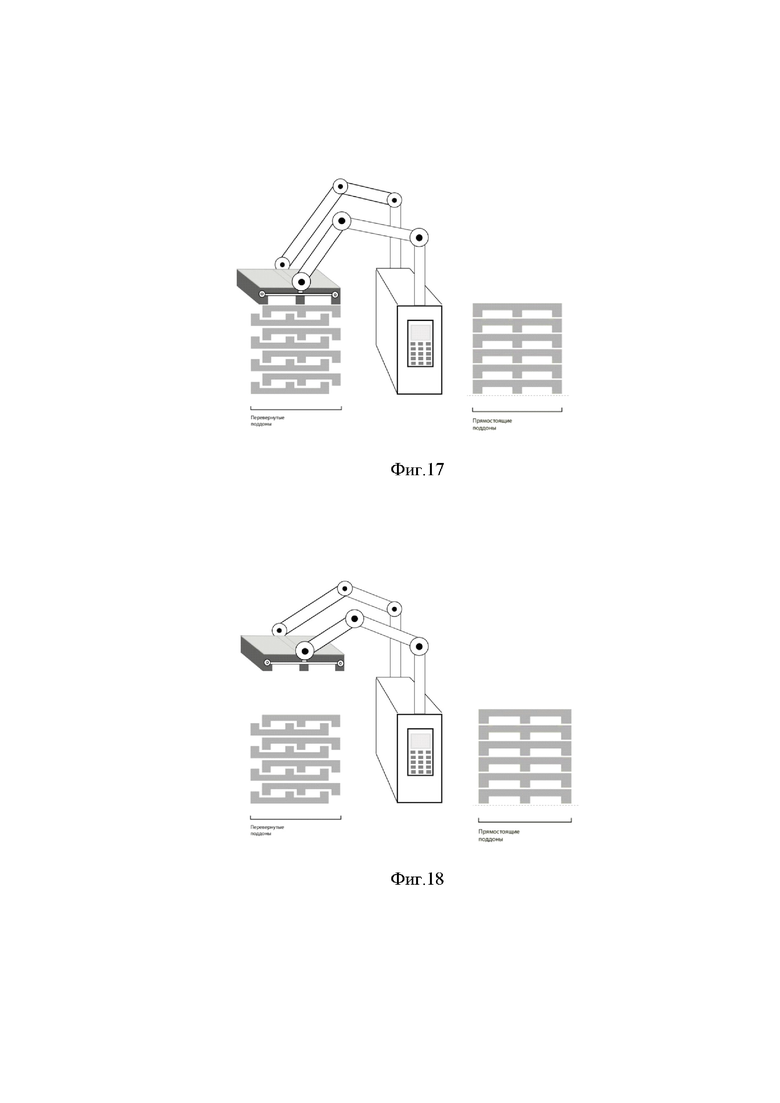
На Фиг. 17 представлено устройство, демонстрирующее алгоритм перемещения паллет из транспортного положения в прямое. Захват прямого паллета;
На Фиг. 18 представлено устройство, демонстрирующее алгоритм перемещения паллет из транспортного положения в прямое. Перемещение паллет;
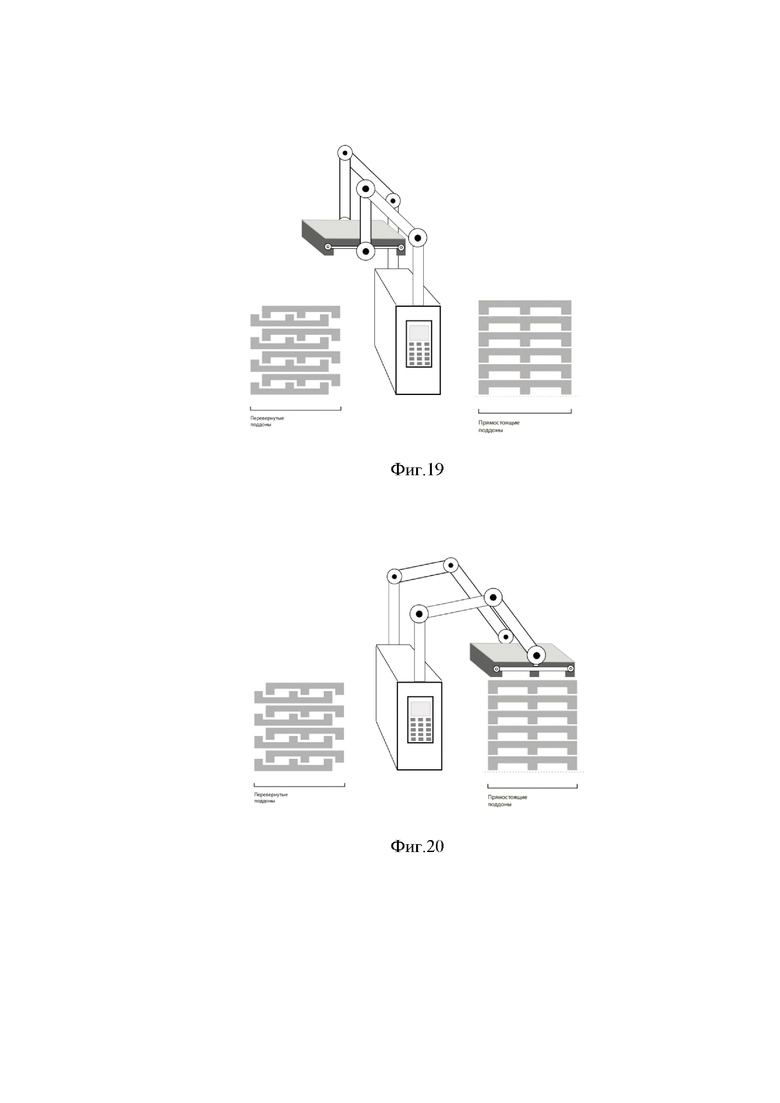
На Фиг. 19 представлено устройство, демонстрирующее алгоритм перемещения паллет из транспортного положения в прямое. Перемещение паллет без переворачивания;
На Фиг. 20 представлено устройство, демонстрирующее алгоритм перемещения паллет из транспортного положения в прямое. Укладывание паллет;
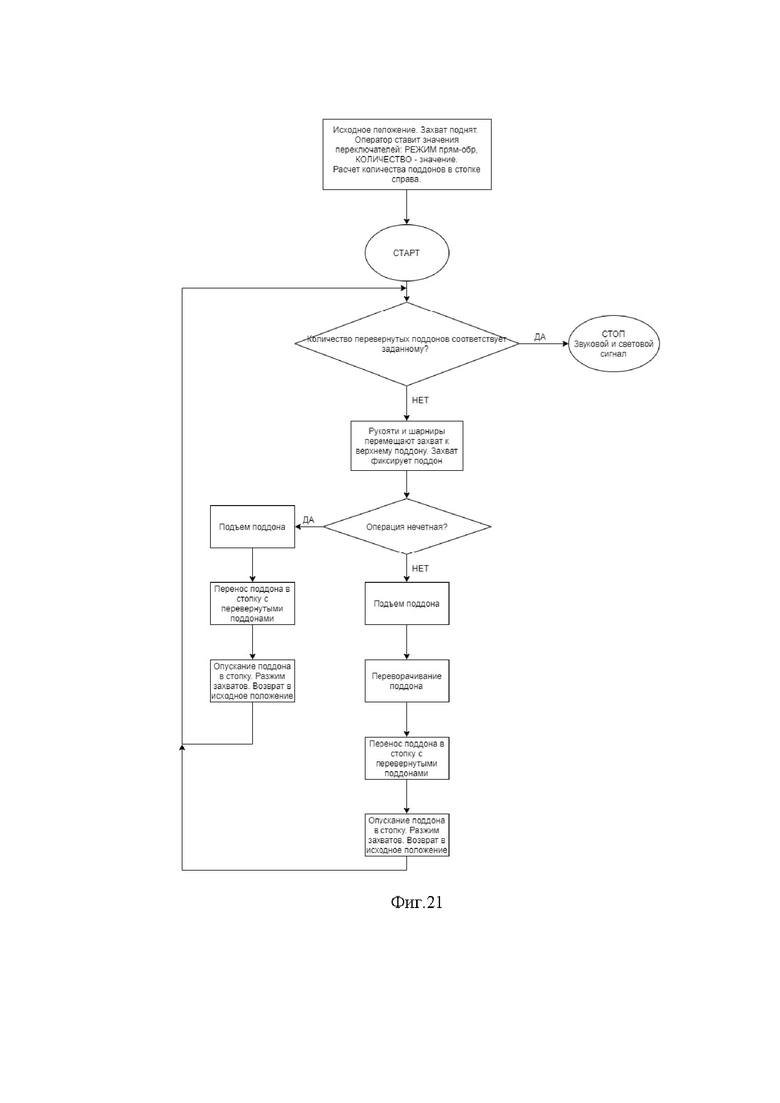
На Фиг. 21 представлен алгоритм работы устройства при перемещении паллет из транспортного положения в прямое.
Осуществление изобретения
Способ и алгоритм осуществления изобретения по перемещению паллет из положения «все прямо» в положение «один прямо», «второй перевернутый» представлен на Фиг. 12.
Способ и алгоритм осуществления изобретения по перемещению паллет из положения один прямо», «второй перевернутый» в стопку «все прямо» представлен на Фиг. 21.
Конструкция устройства для приведения паллет различных типов в прямое и транспортное положение и обратно рассмотрена на Фиг. 1., и состоит из корпуса 1 с силовыми приводами, блоком управления 2, шарнирами 3а и 3б, рукоятями 4 с возможностью выдвижения и захватом 5 с зажимами 6 и установленными датчиками.
Корпус 1 выполнен в виде прочного материала - металла или пластика, содержит силовые элементы, преобразователи и служит несущей конструкцией для механизмов устройства. Блок управления 2 служит для отображения информации, выбора режимов работы. Шарниры 3а и 3б, а также сочлененные рукояти 4 придают требуемое положение захвату 5. Захват 5 производит позиционирование зажимов паллет 6 с помощью датчиков, осуществляет зажим и удержание паллет. Рабочая зона устройства подлежит огораживанию в целях безопасности. Блок управления 2 включает функции: выбор типа паллет, выбор режима работы, выбор количества паллет для переворачивания, счетчик паллет, наработку, сигнализацию об ошибках, аварийное выключение. Шарниры рукоятей 3а и 3б имеют одну степень свободы, отвечают за позиционирование паллет в пространстве, переворачивание паллет, позиционирование захвата.
Рассмотрен частный случай работы устройства для приведения паллет различных типов в прямое и транспортное положение на Фиг. 1.
Захваты 5 служат для фиксации паллет в четырех точках, зажимами 6 возвратно-поступательного действия с негладкой поверхностью. Ширина зажимов 6 регулируется для возможности работы с различными типами паллет. Шарниры 3а служат для переворачивания каждого второго паллета, а ровный паллет переносится без переворачивания. Шарниры 3б служат для перемещения паллет из одной стопки в другую, позиционирования паллет по высоте и горизонтали, т.е. смещение. Блок управления 2 включает в себя индикаторы/визуализаторы и органы управления, где отображается информация о выбранном режиме работы, коды ошибок, счетчик паллет, наработка. Органы управления - выбор режима работы, тип обрабатываемого паллета, выбор количества паллет для обработки, кнопка аварийной остановки, кнопка сброса ошибки и др. Силовые механизмы, блок питания, процессор и т.д. размещаются непосредственно в корпусе устройства 1. Устройство оборудуется сигнальным маячком для предупреждения об опасности. Зона вокруг устройства и стопок паллет ограждается. Для питания используется электричество, возможно - сжатый воздух.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ МАНЕВРИРОВАНИЯ АВТОКЛАВНЫМИ ТЕЛЕЖКАМИ | 2012 |
|
RU2508986C2 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПО УКЛАДКЕ НА ПОДДОНЫ | 2023 |
|
RU2813504C1 |
| СИСТЕМА РАЗГРУЗКИ И СПОСОБ РАЗГРУЗКИ ТРАНСПОРТНОЙ ТЕЛЕЖКИ ДЛЯ ПРОТЕКТОРОВ ШИН | 2015 |
|
RU2656465C2 |
| СПОСОБ СМЕНЫ ПОДДОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634737C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ЗАХВАТА ЛИСТОВОГО МАТЕРИАЛА | 2013 |
|
RU2614366C2 |
| БАНКНОТООБРАБАТЫВАЮЩЕЕ УСТРОЙСТВО С СЕКЦИЕЙ УДАЛЕНИЯ БАНДЕРОЛЕЙ И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2010 |
|
RU2556434C2 |
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА И ПАРАШЮТНАЯ СИСТЕМА ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА | 2014 |
|
RU2592961C2 |
| Устройство для укладки паллеты | 2018 |
|
RU2785653C2 |
| УСТРОЙСТВО ДЛЯ ТАСОВАНИЯ КАРТ С АВТОМАТИЧЕСКОЙ КАЛИБРОВКОЙ ПО РАЗМЕРУ КАРТ | 2002 |
|
RU2316372C2 |
| ЛИНИЯ ДЛЯ ПРОИЗВОДСТВА ПРОДУКТОВ ПИТАНИЯ | 2012 |
|
RU2575215C2 |
Изобретение относится к устройствам для подъема и перемещения грузов, а именно к устройствам для перегрузочных работ. Устройство для приведения паллет различных типов в прямое и транспортное положение состоит из корпуса (1) с силовыми приводами, блока управления (2), шарнирами (3), сочлененными рукоятями (4) с возможностью выдвижения и захватом (5) с зажимами (6) с установленными датчиками. Достигается исключение ручного труда при переворачивании паллет из прямого положения в транспортное и наоборот. 2 н. и 10 з.п. ф-лы, 21 ил.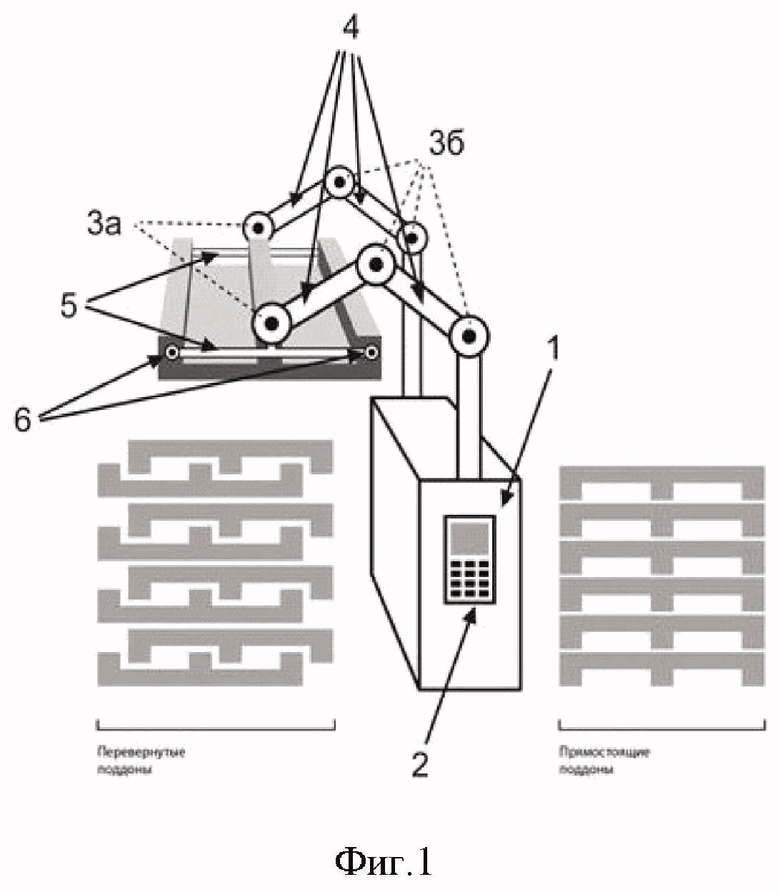
1. Способ перемещения паллет различных типов в прямое и транспортное положение, включающий перемещение паллет из положения все прямо в положение один прямо, второй перевернутый и/или из положения один прямо, второй перевернутый в положение все прямо, отличающийся тем, что устанавливают значение переключателей, шарнирно-сочлененные рукояти перемещают захват к верхнему паллету, фиксируют паллет с помощью захвата, поднимают паллет, каждый нечетный паллет переносят без переворачивания с помощью шарниров (3б), переворачивают каждый четный паллет с помощью шарниров (3а) и переносят его с помощью шарниров (3б), позиционируют паллет по высоте и горизонтали с помощью шарниров (3б), опускают паллет в стопку.
2. Устройство перемещения паллет различных типов в прямое и транспортное положение для осуществления способа по п. 1, содержащее корпус, в составе с силовыми приводами и преобразователями, блок управления, захват с установленными датчиками, шарниры (3а), служащие для переворачивания паллета, шарниры (3б), служащие для перемещения паллета из одной стопки в другую, позиционирования паллета по высоте и горизонтали, первую пару рукоятей, соединенную с захватом с помощью шарниров (3а), вторую пару рукоятей, соединенную с первой парой рукоятей с помощью шарниров (3б) и соединенную с корпусом устройства с помощью шарниров (3б), причем пары шарнирно-сочлененных рукоятей выполнены с возможностью их выдвижения.
3. Устройство по п. 2, отличающееся тем, что корпус выполнен в виде металла или пластика.
4. Устройство по п. 2, отличающееся тем, что корпус содержит как минимум силовые механизмы, блок питания, процессор.
5. Устройство по п. 2, отличающееся тем, что корпус является несущей конструкцией для механизмов устройства.
6. Устройство по п. 2, отличающееся тем, что шарниры рукоятей имеют одну степень свободы.
7. Устройство по п. 2, отличающееся тем, что блок управления оснащен индикаторами/визуализаторами.
8. Устройство по п. 2, отличающееся тем, что блок управления оснащен органами управления.
9. Устройство по п. 8, отличающееся тем, что органы управления осуществляют выбор режима работы, тип обрабатываемого паллет, выбор количества паллет для обработки, счетчик паллет.
10. Устройство по п. 8, отличающееся тем, что органы управления содержат кнопку аварийной остановки, кнопку сброса ошибки.
11. Устройство по п. 2, отличающееся тем, что оснащено сигнальным маячком для предупреждения об опасности.
12. Устройство по п. 2, отличающееся тем, что для питания устройства используется электричество и/или сжатый воздух.
| CN 208326757 U, 04.01.2019 | |||
| СПОСОБ СМЕНЫ ПОДДОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634737C1 |
| KR 101446007 B1, 01.10.2014 | |||
| Машина для формочки и посадки теста на выдвижные поды хлебопекарных печей с мундштуком для выпускания теста в виде полосы | 1929 |
|
SU22632A1 |
