Изобретение относится к системам управления транспортными средствами участка автоклавирования бетонной смеси и может применяться на предприятиях строительной индустрии при производстве изделий из ячеистого бетона.
Известно устройство для создания вертикального склада, состоящее из транспортных тележек и подъемника, снабженных индивидуальными контроллерами с зависимыми от центрального компьютера программами управления (Техническое описание автоматического вертикального склада "Интеллектуальный склад" МНПП "САТУРН" "http://saturn-t.ru/tehnicheskoe_opisanie_a").
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, относится то, что оно не позволяет создать склад в условиях работы цеха, поскольку создание подобного склада требует большой площади.
Наиболее близким устройством того же назначения к заявленному устройству по совокупности признаков является устройство, называемое автоматическим вертикальным складом, включающее в себя: две роботизированные транспортные системы, состоящие из транспортных тележек и подъемника, снабженных индивидуальными контроллерами с зависимыми от центрального компьютера с программами управления. Первым этапом происходит разгрузка с грузового транспортного средства, затем происходит паллетизация груза (установление его на паллеты), далее при помощи подъемника паллеты с грузом перемещаются на высоту захвата транспортной тележкой, при помощи транспортной тележки происходит позиционирование паллеты в зону складирования (http://saturn-t.ru/tehnicheskoe_opisanie_а"). Принят за прототип.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства относится то, что автоматический вертикальный склад требует большой площади и не предназначен для перемещения массивных грузов с большими геометрическими параметрами.
Сущность изобретения заключается в повышении производительности технологического участка, в создании системы маневрирования автоклавными тележками, которая позволила бы сократить число "ходок" автоклавного крана.
Технический результат - создание склада на маленькой площади в условиях работы цеха, возможность перемещения массивных грузов с большими геометрическими параметрами, сокращение времени работы автоклавного крана.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном автоматизированном устройстве для маневрирования автоклавными тележками при производстве ячеистого бетона, содержащем многоярусный вертикальный склад с несущей конструкцией, автоклавный кран, поезд с автоклавными тележками и привод перемещения для его выкатывания из автоклава, индивидуальные контроллеры с зависимыми от центрального компьютера программами управления, особенностью является то, что оно дополнительно снабжено вилочным погрузчиком с тремя системами позиционирования, совершающим горизонтальное движение по дополнительно проложенному рельсовому пути, тензодатчиком и тремя лазерными датчиками, два из которых закреплены на вилочном погрузчике: датчик расстояния, позволяющий отслеживать текущее и пройденное им расстояние относительно базовой точки, и датчик, позволяющий отследить текущую высоту подъема автоклавной тележки, а третий датчик расположен на несущей конструкции многоярусного вертикального склада, позволяет отслеживать текущую высоту склада; тензодатчик, срабатывающий при позиционировании автоклавной тележки и запускающий систему складирования, расположен на рельсах участка складирования, при этом информация, полученная со всех датчиков, подается на контроллер для последующей обработки и передачи по назначению.
Происходит позиционирование погрузчика к точке захвата автоклавной телеги. По достижению данной точки отключается привод перемещения, включается привод подъема, происходит перемещение телеги на необходимую высоту, по достижении которой привод подъема отключается.
Далее включается привод движения, происходит перемещение погрузчика к участку складирования (к "стопке" автоклавных телег), по достижении которого отключается привод движения, включается привод подъема, происходит позиционирование телеги в "стопку". После позиционирования телеги отключается привод подъема, включается привод перемещения, вилочный погрузчик возвращается в исходную, базовую точку, по достижению которой отключается привод перемещения, включается привод подъема, происходит перемещение привода подъема на "нулевой" уровень. В данном случае экономический эффект достигается за счет уменьшения времени работы автоклавного крана, поскольку последний делает одну "ходку" вместо двух.
Автоматическая работа вилочного погрузчика достигается за счет наличия контроллера и ряда датчиков.
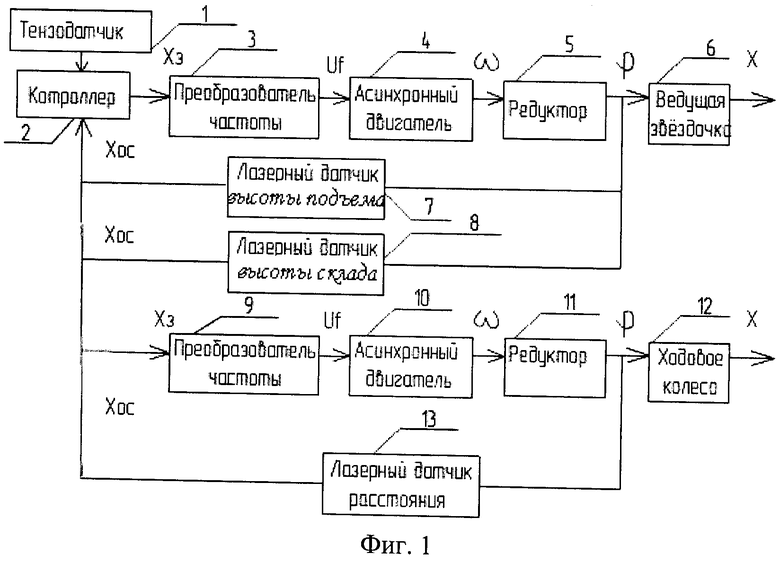
На фиг.1 изображена функциональная схема автоматического вилочного погрузчика, где приняты следующие обозначения: 1 - тензодатчик, 2 - контроллер, 3 - преобразователь частоты, 4 - асинхронный двигатель, 5 - редуктор, 6 - ведущая звездочка, 7 - лазерный датчик высоты подъема, 8 - лазерный датчик высоты склада, 9 - преобразователь частоты, 10 - асинхронный двигатель, 11 - редуктор, 12 - ходовое колесо, 13 - лазерный датчик расстояния.
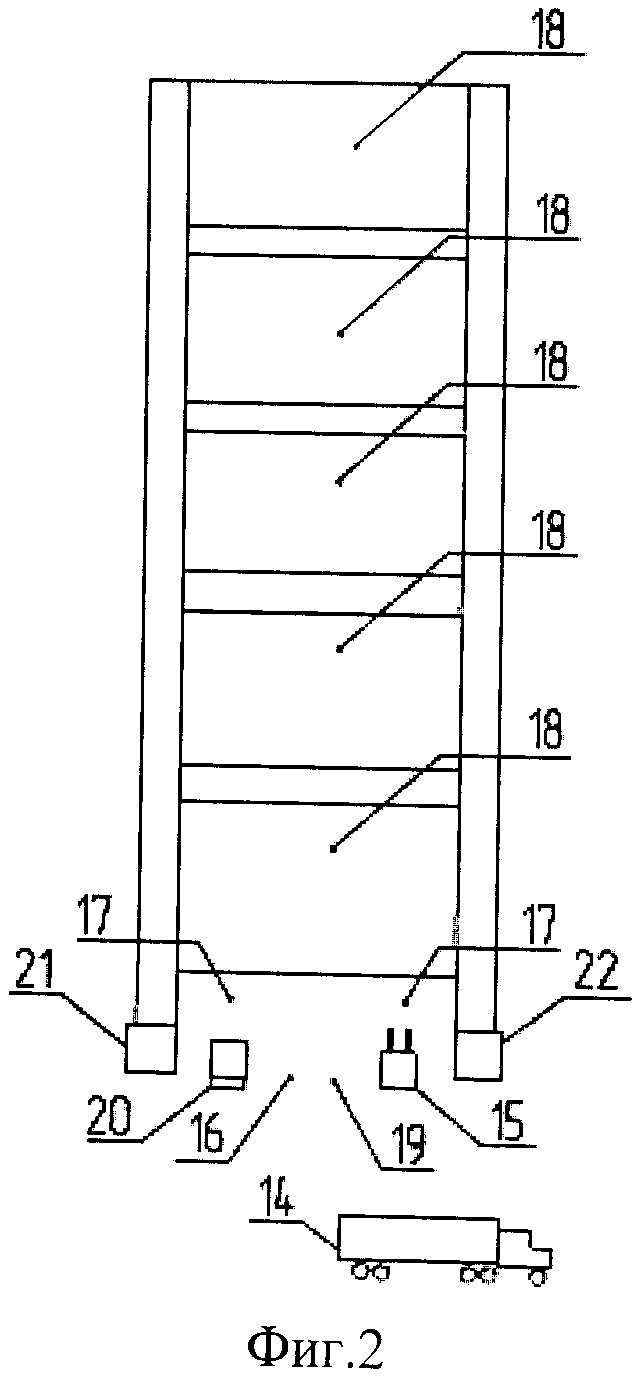
На фиг.2 изображен автоматический вертикальный склад, где приняты следующие обозначения: 14 - зона погрузки и выгрузки с грузовых автотранспортных средств, 15 - зона паллетизации груза, 16 - зона приемки паллет с товаром, 17 - зоны загрузки-отгрузки паллет с товаром, 18 - зона хранения паллет, 19 - зона заказа, 20 - рабочее место оператора, 21 - транспортная система 1, 22 - транспортная система 2.
На фиг.3 изображен общий вид вилочного погрузчика с 3-мя системами позиционирования.
Автоматизированное устройство включает в себя три лазерных датчика: лазерный датчик расстояния, лазерный датчик высоты подъема, лазерный датчик высоты склада.
Лазерный датчик расстояния, закрепленный на погрузчике, позволяет отследить текущее, пройденное им расстояние относительно базовой точки (базовой поверхности). Второй лазерный датчик высоты подъема расположен на нижней стороне вилочного погрузчика, позволяет отследить текущую высоту подъема автоклавной телеги. Третий лазерный датчик высоты склада расположен над стопкой из автоклавных телег на несущей конструкции и направляет вертикальный лазерный луч вниз на "стопку" автоклавных телег, позволяя тем самым отследить текущую высоту "стопки". Тензодатчик установлен на рельсах участка складирования. На основании полученной информации с лазерного датчика высоты подъема и лазерного датчика высоты склада формируется задающий сигнал для привода подъема. Система управления приводом передвижения является замкнутой, в обратной связи находится лазерный датчик расстояния. Система управления приводом подъема также является замкнутой, в обратной связи находится лазерный датчик высоты подъема. Также в системе присутствует тензодатчик, установленный на рельсовом пути и срабатывающий при позиционировании автоклавной телеги автоклавным краном, этот тензодатчик включает систему складирования. При складировании основным показателем качества технологического процесса является точность позиционирования. Для достижения необходимой точности (0,01 м) в приводе передвижения используется силовой преобразователь частоты для регулирования скорости вращения вала и ПИ-регулятор, позволяющий повысить точность остановки погрузчика. Входной координатой в данном случае является частота питающего напряжения, подаваемая с выхода силового преобразователя частоты, выходной координатой является перемещение вилочного погрузчика относительно базовой точки (базовой поверхности). В случае привода подъема предъявляются более жесткие требования к работе исполнительного механизма, поэтому точность остановки вилочного погрузчика должна составлять 0,001 м. В нем также используется СПЧ и ПИ-регулятор. Входной координатой в данном случае является частота питающего напряжения, подаваемая с выхода силового преобразователя частоты, выходной координатой является вертикальное перемещение привода подъема.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного технического результата.
Привод передвижения представляет собой совокупность асинхронного двигателя, муфты и редуктора, работа привода управляется лазерным датчиком расстояния. Привод подъема состоит из асинхронного двигателя, муфты и редуктора, работа привода управляется лазерным датчиком высоты подъема.
Устройство работает следующим образом. С тензодатчика 1 формируется задающий сигнал для привода перемещения, перемещение погрузчика отслеживается лазерным датчиком расстояния, по достижении точки захвата включается механизм подъема, работа которого отслеживается лазерным датчиком высоты подъема, с лазерного датчика высоты склада поступает информация о текущей высоте стопки, на основании полученной информации с лазерного датчика высоты подъема и лазерного датчика высоты склада формируется задающий сигнал для привода подъема, далее происходит позиционирование погрузчика к участку складирования, происходит складирование автоклавной тележки, затем погрузчик возвращается в базовую точку.
Заявленное устройство позволяет производить складирование автоклавных тележек в автоматическом режиме. С применением заявленного автоматизированного устройства повышается производительность технологического участка за счет сокращения времени работы автоклавного крана на малых площадях с крупногабаритными массивными грузами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНАЯ СИСТЕМА СКЛАДА ВЫСОКОПЛОТНОГО ЯРУСНОГО ХРАНЕНИЯ ГРУЗА НА ПОДДОНАХ | 2006 |
|
RU2323149C1 |
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ ПАЛЛЕТ В ПРЯМОЕ И ТРАНСПОРТНОЕ ПОЛОЖЕНИЕ | 2021 |
|
RU2801756C2 |
| СПОСОБ И УСТРОЙСТВО, ПОЗВОЛЯЮЩЕЕ ИСПОЛЬЗОВАТЬ ОБЪЕКТЫ С ПРЕДВАРИТЕЛЬНО УСТАНОВЛЕННЫМИ КООРДИНАТАМИ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРОМЫШЛЕННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2571580C2 |
| Автоматизированная система паллетного хранения высокой плотности | 2023 |
|
RU2814123C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПО УКЛАДКЕ НА ПОДДОНЫ | 2023 |
|
RU2813504C1 |
| УСТРОЙСТВО КОНТРОЛЯ РАБОТЫ ПОГРУЗЧИКОВ | 2005 |
|
RU2297038C1 |
| ЛОГИСТИЧЕСКИЙ ТЕРМИНАЛ | 2012 |
|
RU2511734C2 |
| Склад для хранения тарных грузов | 1991 |
|
SU1792892A1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ ИСКУССТВЕННОГО ТРАВЯНОГО ПОКРОВА | 2004 |
|
RU2322544C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ РУЛОНОВ ПЕЧАТНОЙ ПРОДУКЦИИ | 1992 |
|
RU2071926C1 |
Изобретение относится к системам управления транспортными средствами участка автоклавирования бетонной смеси и может применяться на предприятиях строительной индустрии при производстве изделий из ячеистого бетона. Изобретение позволит уменьшить время складирования тележек. Автоматизированное устройство для маневрирования автоклавными тележками при производстве ячеистого бетона содержит многоярусный вертикальный склад с несущей конструкцией, автоклавный кран, поезд с автоклавными тележками и привод перемещения для его выкатывания из автоклава, индивидуальные контроллеры с зависимыми от центрального компьютера программами управления, Оно снабжено вилочным погрузчиком с тремя системами позиционирования, совершающим горизонтальное движение по дополнительно проложенному рельсовому пути, тензодатчиком и тремя лазерными датчиками, два из которых закреплены на вилочном погрузчике: датчик расстояния, позволяющий отслеживать текущее и пройденное им расстояние относительно базовой точки, и датчик, позволяющий отследить текущую высоту подъема автоклавной тележки. Третий датчик расположен на несущей конструкции многоярусного вертикального склада, позволяет отслеживать текущую высоту склада. Тензодатчик срабатывает при позиционировании автоклавной тележки и запускает систему складирования. Он расположен на рельсах участка складирования. Информация, полученная со всех датчиков, подается на контроллер для последующей обработки и передачи по назначению. 3 ил.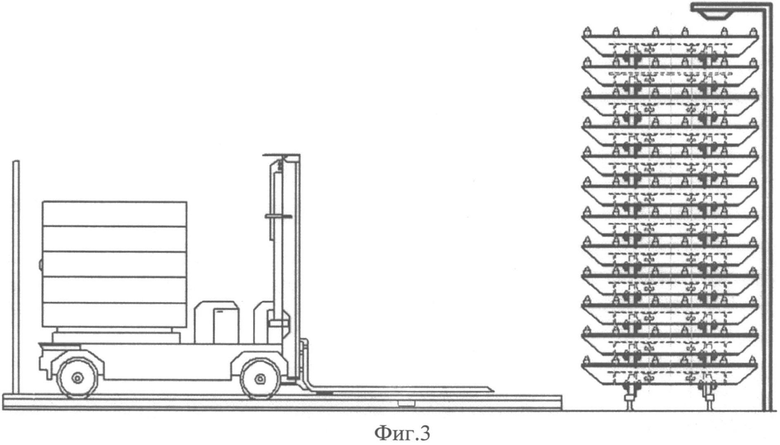
Автоматизированное устройство для маневрирования автоклавными тележками при производстве ячеистого бетона, содержащее многоярусный вертикальный склад с несущей конструкцией, автоклавный кран, поезд с автоклавными тележками и привод перемещения для его выкатывания из автоклава, индивидуальные контроллеры с зависимыми от центрального компьютера программами управления, отличающееся тем, что оно дополнительно снабжено вилочным погрузчиком с тремя системами позиционирования, совершающим горизонтальное движение по дополнительно проложенному рельсовому пути, тензодатчиком и тремя лазерными датчиками, два из которых закреплены на вилочном погрузчике: датчик расстояния, позволяющий отслеживать текущее и пройденное им расстояние относительно базовой точки, и датчик, позволяющий отследить текущую высоту подъема автоклавной тележки, а третий датчик расположен на несущей конструкции многоярусного вертикального склада, позволяет отслеживать текущую высоту склада; тензодатчик, срабатывающий при позиционировании автоклавной тележки и запускающий систему складирования, расположен на рельсах участка складирования, при этом информация, полученная со всех датчиков, подается на контроллер для последующей обработки и передачи по назначению.
| Передвижной продольно-шлифовальный станок | 1949 |
|
SU83024A1 |
| DE 19632724 A1, 19.02.1998 | |||
| КОНВЕЙЕРНЫЙ СПОСОБ ИЗГОТОВЛЕНИЯ ЯЧЕИСТОБЕТОННЫХ ИЗДЕЛИЙ И КОНВЕЙЕРНАЯ ЛИНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2054996C1 |
| Приспособление к двойному обрезному станку для указания наивыгоднейших линий обреза | 1934 |
|
SU41671A1 |
| УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ БЛОКОВ ИЗ ЯЧЕИСТОГО БЕТОНА | 0 |
|
SU334068A1 |

