Область техники
Изобретение относится к железнодорожному транспорту и может быть использовано для автоматизации управления движением поездов.
Уровень техники
Управление движением поездов на железнодорожном транспорте является ответственным технологическим процессом. Устройство контроля схода подвижного состава (далее - УКСПС) является дополнительным средством обеспечения безопасности движения поездов. Оно используется для автоматического обнаружения деталей, которые выступают за пределы нижнего габарита в железнодорожном составе, для предупреждения схода подвижного состава путем остановки поезда перед станцией или иным ограждаемым объектом.
В состав УКСПС входят стационарные датчики, которые размещаются в зоне нижнего габарита подвижного состава и крепятся на шпале или специальной планке. При проходе подвижной единицы (локомотива, вагона в составе поезда) с нарушенным нижним габаритом или сходом тележки происходит ее взаимодействие с датчиком УКСПС, что приводит к срабатыванию последнего. Информация о факте срабатывания датчика воспринимается устройствами электрической централизации ЭЦ станции, которые переключают входной светофор станции на запрещающее показание.
Существующие способы работы УКСПС основываются на необходимости реализации предусмотренных действующей редакцией Правил технической эксплуатации железных дорог РФ (далее - ПТЭ) требования остановки головы поезда перед светофором, ограждающим охраняемый объект служебным торможением.
Из уровня техники известен способ работы УКСПС (Распоряжение ОАО «РЖД» от 05.12.2018 г. №2586/р, интернет-ресурс https://legalacts.ru/doc/rasporjazhenie-oao-rzhd-ot-05122018-n-2586r-ob-utverzhdenii/, просмотрено 05.07.2022 г. ), принятый за наиболее близкий аналог к заявляемому решению и заключающийся в том, что устанавливают первый датчик УКСПС на заданное расстояние от границы участка с ограждаемым объектом, а после срабатывания первого датчика УКСПС выполняют служебное торможение с остановкой головы поезда перед ограждаемым объектом.
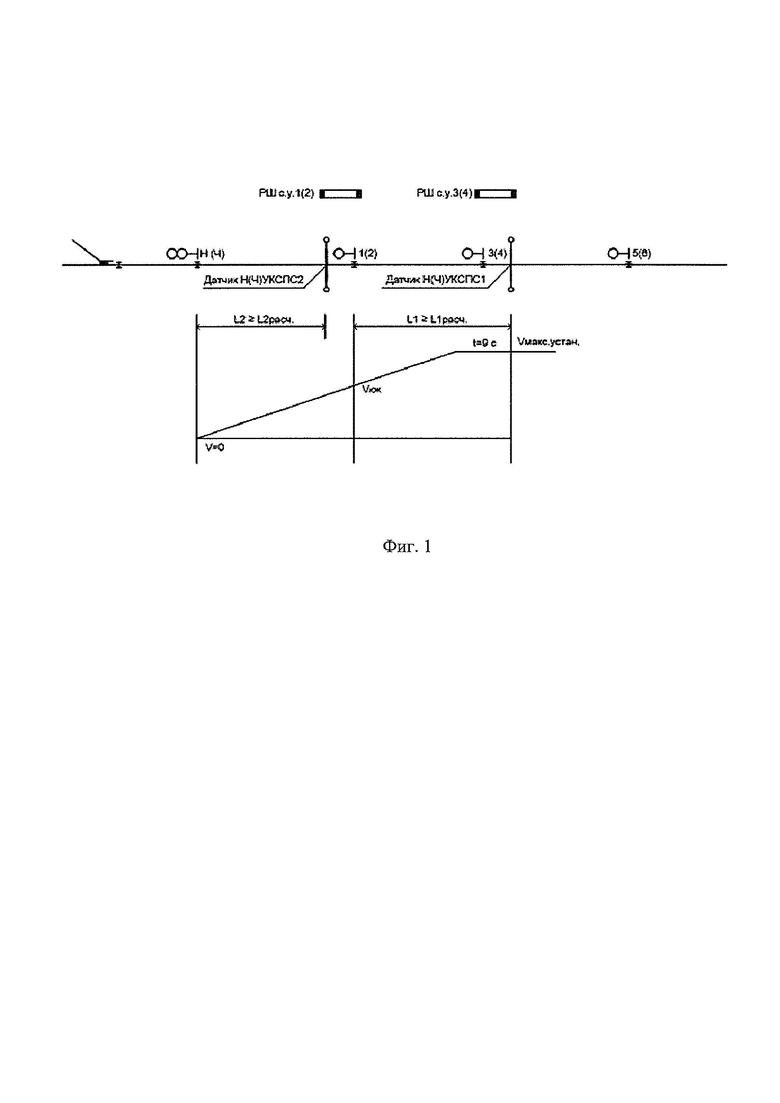
Согласно данному способу, заданное расстояние L1расч, на которое устанавливается первый датчик УКСПС от границы участка с ограждаемым объектом (см. фиг. 1), определяется, как сумма максимальной установленной длины поездов Lпоезда, обращающихся на данном участке, расстояния Lпути9 с, проходимого поездом за суммарное время, необходимое для восприятия машинистом информации о срабатывании первого датчика УКСПС и равное 9 с, и расстояния Lсл.тор., равного длине служебного торможения с установленной скорости движения поезда до полной остановки.

Суммарное время восприятия машинистом информации о срабатывании датчика УКСПС, равное 9 с, включает в себя время срабатывания первого датчика УКСПС, время смены кодов автоматической локомотивной сигнализации АЛС и смены показания на бортовых устройствах (6 с), а также время реакции машиниста (3 с).
Однако значительное расстояние от входного светофора до первого датчика УКСПС при соблюдении данных условий (до 5000 метров и выше) создает риски необнаружения сошедшего подвижного состава на подходе к станции или другому ограждаемому объекту, если сход колесной пары вагона произошел уже после проследования неисправной подвижной единицей первого датчика УКСПС.
Поэтому для снижения указанных рисков устанавливают дополнительный второй датчик УКСПС (см. фиг. 1), расстояние от которого L2расч до ограждаемого объекта определяют, как сумму максимальной установленной длины поездов Lпоезда; обращающихся на данном участке (при условии, что это расстояние превышает длину тормозного пути поезда экстренным торможением) и расстояния Lnyти9 с проходимого поездом за суммарное время, необходимое для восприятия машинистом информации о срабатывании первого датчика УКСПС и равное 9 с:

В таком случае использование второго дополнительного датчика УКСПС также обеспечивает остановку головы поезда перед ограждаемым объектом, но экстренным торможением.
Рассмотренный способ работы УКСПС является универсальным и может применяться независимо от оснащенности участков железных дорог системами интервального регулирования и устройствами позиционирования подвижного состава.
Однако недостатками данного способа являются:
1. Аппаратная избыточность.
Для реализации способа устанавливают два комплекта датчиков УКСПС одинакового назначения с соответствующей им контрольной аппаратурой и кабельными сетями. При этом первый датчик УКСПС удален от ограждаемого объекта на значительное расстояние.
2. Обеспечение гарантии остановки поезда без дополнительных рисков нарушения условий безопасности движения только первым датчиком УКСПС из двух используемых комплектов датчиков.
Остановка поезда экстренным торможением при срабатывании второго дополнительного датчика УКСПС влечет за собой риски травмирования пассажиров, повреждения груза и подвижного состава.
3. Отсутствие автоматического обеспечения остановки поездов повышенной длины и сдвоенных поездов.
При срабатывании датчиков УКСПС под вагонами, расположенными от головы поезда дальше принятой для расчета максимальной длины поезда, фактического расстояния от головы поезда до ограждаемого объекта может быть недостаточно не только для остановки головы поезда перед ним, но и для простого восприятия машинистом или бортовыми устройствами АЛС изменения показания на светофоре.
Следует отметить, что в существующем способе нет возможности устранить перечисленные недостатки по двум причинам, непосредственно связанным с равной вероятностью возникновения схода колесной пары вагона или иного нарушения нижнего габарита подвижного состава в произвольном месте поезда:
- необходимостью учета в расчете места установки датчика УКСПС наихудших условий для остановки поезда (в хвосте грузового поезда стандартной длины);
- необходимостью остановки именно головы поезда у фиксированной точки прицельного торможения (светофора, ограждающего объект) независимо от того, что неисправная подвижная единица может быть расположена в любом месте в составе поезда.
Имеется теоретическая возможность учета всех дополнительных сведений, необходимых для остановки поезда служебным торможением с исключением въезда именно несправной подвижной единицы (локомотива или вагона в составе поезда) на ограждаемый объект, однако для этого необходимы специализированные устройства для определения информации о длине поезда, месте неисправности в составе поезда, а также дополнительные средства непрерывной передачи информации на бортовые устройства безопасности. Разработка и применение подобных технических средств исключительно для контроля схода подвижного состава являются экономически необоснованными и поэтому не имеют прецедентов.
В настоящее время на стадии окончательного утверждения находится новая редакция ПТЭ, в которой нет требований об остановке перед ограждаемым объектом головы поезда служебным торможением. Для соблюдения требований безопасности движения необходимым и достаточными условием является остановка перед ограждаемым объектом подвижной единицы с нарушенным нижним габаритом служебным торможением для исключения травмирования пассажиров, повреждения грузов или выдавливания вагонов
Технической проблемой заявляемого изобретения является создание способа работы УКСПС, позволяющего устранить имеющиеся недостатки существующего способа, повысить безопасность движения пассажиров, груза и самого подвижного состава.
Раскрытие сущности изобретения
Техническим результатом изобретения является повышение точности остановки служебным торможением неисправной подвижной единицы перед ограждаемым объектом за счет:
- использования существующих технических средств интервального регулирования движения поездов на основе технологии подвижных блок-участков с рельсовыми цепями, позволяющих устанавливать точки прицельного торможения головы поезда в произвольном месте за ограждаемым объектом с точностью до длины рельсовой цепи;
- использования дополнительных логических условий, позволяющих установить точное местоположение неисправной подвижной единицы в составе поезда без применения дополнительных технических средств.
Технический результат достигается при использовании способа работы УКСПС, заключающегося в том, что:
- устанавливают датчик УКСПС на заданное расстояние от границы участка с ограждаемым объектом;
- после срабатывания датчика УКСПС начинают служебное торможение,
причем
- железнодорожный путь разбивают на участки (как правило, стандартной дины), контролируемые рельсовыми цепями;
- при срабатывании датчика УКСПС проверяют информацию о занятых рельсовых цепях в момент срабатывания датчика УКСПС и в предыдущее время, а также факт отсутствия при этом нарушения нижнего габарита в пределах расстояния, равного длине одной или нескольких рельсовых цепей с головы поезда;
- определяют точку прицельного торможения головы поезда, удаленную от головы поезда на расстояние, превышающее длину служебного торможения с максимально установленной скорости до полной остановки с учетом времени восприятия машинистом информации о срабатывании датчика УКСПС, а также времени определения местоположения неисправной подвижной единицы в составе поезда;
- начинают служебное торможение с остановкой перед ограждаемым объектом неисправной подвижной единицы в составе поезда.
Рельсовые цепи, используемые для реализации подвижных блок-участков, являются путевыми датчиками, срабатывающими под воздействием колес подвижного состава с обеспечением дальнейшей передачи информации о состоянии контролируемого участка в систему железнодорожной автоматики. При свободной от подвижного состава рельсовой цепи ток источника питания (сигнал генератора рельсовой цепи) через рельсовую линию поступает в приемник, который фиксирует свободное состояние участка. При размещении колесных пар подвижного состава на рельсовой цепи шунтируется рельсовая линия, в результате сигнал не поступает на путевой приемник, а в систему передается информация о занятости рельсовой линии.
Точность выявления расстояния от неисправной подвижной единицы до головы поезда также, как и точность определения точки прицельного торможения, определяется длиной рельсовых цепей стандартной длины, используемых в системах автоматической блокировки с подвижными блок-участками, составляющей 350-450 метров.
Согласно заявляемому способу, время, необходимое для восприятия машинистом информации о срабатывании датчика УКСПС, может иметь значения, отличные от 9 с, как это имело место в случае наиболее близкого аналога. Данное важное уточнение связано с совершенствованием применяемых устройств и систем.
Таким образом, минимизируется расстояние от места установки датчика УКСПС до ограждаемого объекта (до длины расчетного тормозного пути) и повышается безопасность движения и остановки подвижного состава. Голова поезда при этом может в зависимости от расположения неисправной подвижной единицы в составе поезда остановиться как перед ограждаемым объектом, так и проехать его в режиме торможения, обеспечив лишь необходимое условие остановки неисправной единицы перед ограждаемым объектом.
Краткое описание чертежей
На фиг. 1 показано расположение первого датчика УКСПС и второго дополнительного датчика УКСПС для реализации способа, принятого за наиболее близкий аналог.
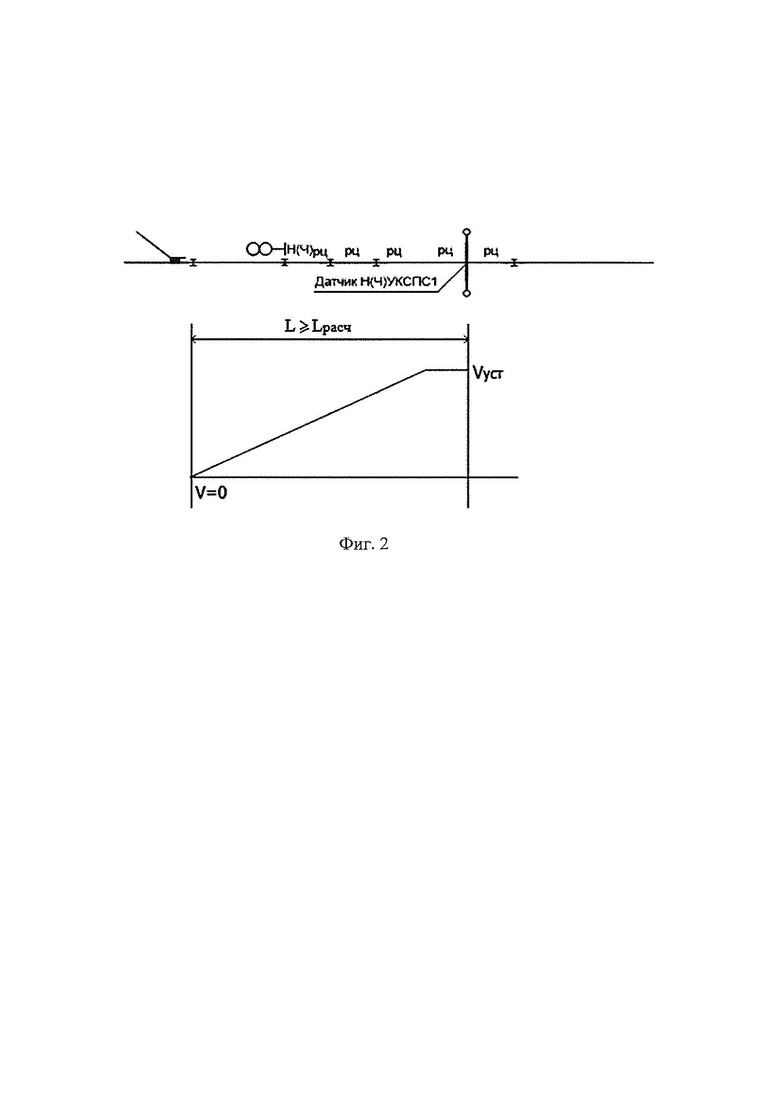
На фиг. 2 показано расположение датчика УКСПС согласно заявляемому способу.
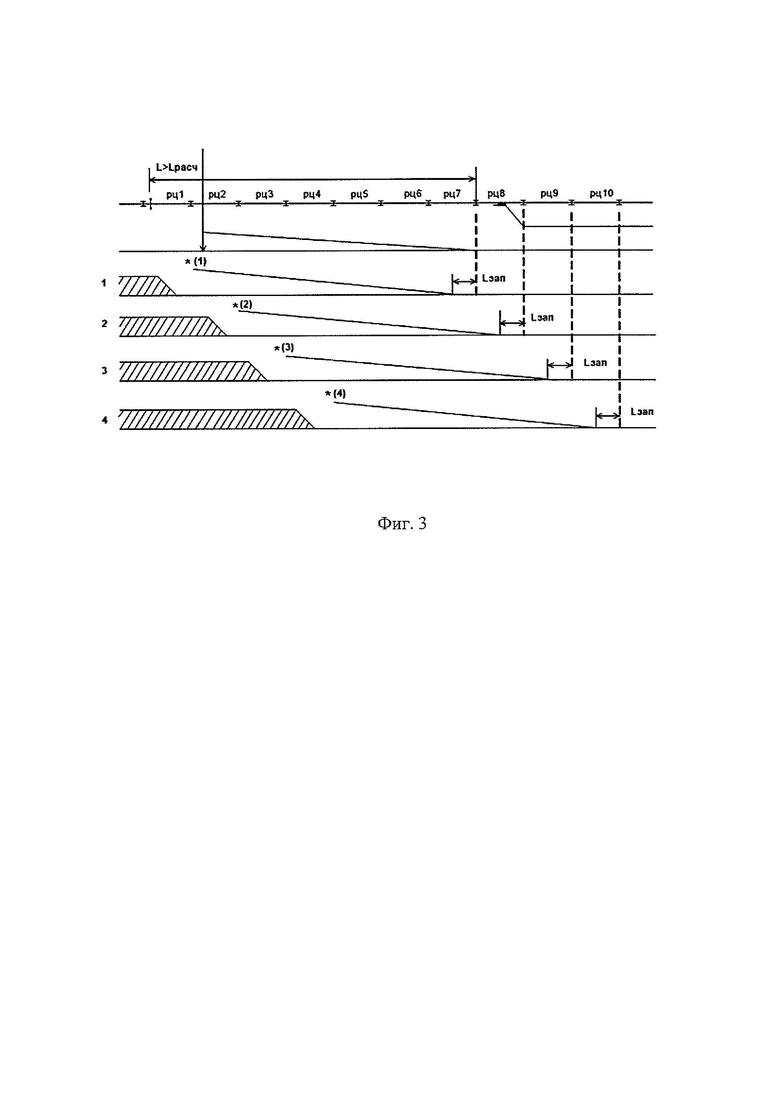
На фиг. 3 показана реализация заявляемого способа работы УКСПС на основе подвижных блок-участков.
На фиг. 1 показано расположение входного светофора «H(Ч)» в зависимости от направления движения, проходные светофоры «1(2)», «3(4)», «5(6)» автоблокировки в зависимости от направления движения, а также релейные шкафы сигнальных установок «РШ с. у. 1(2)» и «РШ с. у 3(4)».
Первый датчик УКСПС «датчик Н(Ч)УКСПС1» расположен у проходного светофора «3(4)» на фактическом расстоянии L1, которое превышает расчетное расстояние L1расч согласно формуле (1).
Второй дополнительный датчик УКСПС «датчик Н(Ч)УКСПС2» расположен у проходного светофора «1(2)» на фактическом расстоянии L2, которое превышает расчетное расстояние L2pacч согласно формуле (2).
При движении поездного состава срабатывает соответственно либо первый «датчик Н(Ч)УКСПС1», расположенный на расстоянии порядка 3000-5000 м от входного светофора, либо дополнительный второй «датчик Н(Ч)УКСПС2», расположенный на расстоянии, соответствующем тормозному пути экстренного торможения поездного состава, которое является нежелательным.
Установка датчика УКСПС согласно заявляемому способу, представленная на фиг. 2, происходит следующим образом.
Для определения ординаты установки датчика УКСПС от границы рельсовой цепи РЦ с ограждаемым объектом отсчитывают расстояние Lpacч, равное длине служебного торможения с максимально установленной скорости до полной остановки Lvуст, далее от полученной ординаты отсчитывают расстояние Lпути, проходимое поездом за время, необходимое для восприятия машинистом информации о срабатывании датчика УКСПС, затем отсчитывают расстояние Lpaзн, учитывающее разность длин рельсовых цепей в пределах тормозного пути поезда, затем полученное расстояние округляют в большую сторону до границы текущей рельсовой цепи Lзап:

При проходе неисправной подвижной единицы (локомотива, вагона в составе поезда) с нарушенным нижним габаритом или сходом тележки через датчик УКСПС происходит срабатывание этого датчика. Информация о факте срабатывания датчика УКСПС воспринимается устройствами интервального регулирования движения поездов и сопоставляется с информацией о занятых рельсовых цепях в момент срабатывания датчика УКСПС и в предыдущее время в соответствии с логическим условием, проверяющим факт отсутствия при этом нарушения нижнего габарита в поезде в пределах длины одной или нескольких рельсовых цепей с головы поезда.
После проверки логического условия и определения расположения неисправной подвижной единицы в составе поезда определяется ближайшая точка прицельного торможения головы поезда на границе между рельсовыми цепями, удаленная от головы поезда на расстояние, превышающее длину служебного торможения с учетом времени восприятия информации машинистом о срабатывании датчика УКСПС, а также времени определения местоположения неисправной подвижной единицы в составе поезда.
На фиг. 3 показано расстояние L, которое представляет собой фактическое расстояние установки датчика УКСПС, которое превышает расчетное расстояние Lрасч установки датчика УКСПС.
Под обозначениями 1, 2, 3, 4 приводятся разные случаи, отражающие срабатывание датчика УКСПС в разное время.
Обозначением *(2), *(3), *(4) показаны расчетные точки начала служебного торможения для случаев 1, 2, 3, 4 для остановки неисправной подвижной единицы в составе поезда перед границей рельсовой цепи РЦ с ограждаемым объектом с максимально установленной скорости Vycт до 0 с учетом времени восприятия информации машинистом о срабатывании датчика УКСПС.
При срабатывании датчика УКСПС при нахождении головы поезда на рельсовой цепи РЦ1 в самом позднем случае торможение начинается от границы рельсовых цепей РЦ1 и РЦ2 и заканчивается перед восьмой рельсовой цепью РЦ8, перед ограждаемым объектом.
При срабатывании датчиков УКСПС при нахождении поезда на рельсовой цепи РЦ2, проверкой логического условия «отсутствие срабатывания датчика при нахождении головы поезда на РЦ1» проверяется не только факт срабатывания датчика УКСПС, но и факт отсутствия нарушения нижнего габарита в поезде в пределах длины рельсовой цепи с головы поезда. Проверка данного условия позволяет начать служебное торможение (изменить показания АЛС на Ж-КЖ) с границы рельсовых цепей РЦ2 и РЦ3 с точкой прицельного торможения головы поезда между РЦ8 и РЦ9 - уже за ограждаемым объектом. При этом за счет проверки логического условия «отсутствие нарушения нижнего габарита в поезде в пределах длины рельсовой цепи с головы поезда» соблюдаются условия безопасности движения - остановка неисправной единицы перед ограждаемым объектом.
Аналогично, при срабатывании датчика УКСПС при нахождении поезда на рельсовой цепи РЦЗ, предварительно проверяется логическое условие «отсутствие срабатывания датчика при нахождении головы поезда на РЦ1 и РЦ2». Начало служебного торможения начинается с границы рельсовых цепей РЦЗ и РЦ4 с точкой прицельного торможения головы поезда между РЦ9 и РЦ10 за ограждаемым объектом, но с остановкой неисправной подвижной единицы перед ограждаемым объектом согласно требованиям.
В случае, если рельсовая цепь (группа рельсовых цепей) перед точкой прицельного торможения окажется короче рельсовой цепи в контролируемой зоне датчика УКСПС, остановка неисправной подвижной единицы в составе поезда перед ограждаемым объектом гарантируется с учетом расстояния Lразн, определяемого как разность длин рельсовых цепей в пределах возможного тормозного пути.
Расстояние Lpaзн будет равно нулю, если рельсовые цепи на участке между местом установки датчика УКСПС и местом остановки строго равны между собой.
Место установки датчика УКСПС в общем случае не будет совпадать с границей рельсовой цепи. При этом местоположение неисправного вагона определяется с точностью «в пределах длины» рельсовой цепи. Поэтому также необходимо учитывать расстояние Lзап, которое соответствует округлению расчетного расстояния L в большую сторону до границы текущей рельсовой цепи.
Заявляемый способ может быть реализован и в других системах интервального регулирования движения поездов (например, на основе виброакустических технологий позиционирования). Главными практическими условиями применимости являются: точность позиционирования не ниже половины длины грузовых поездов, обращающихся на участке, и наличие технических средств локомотивной сигнализации, обеспечивающих прицельную остановку поезда в точках с дискретностью не ниже точности позиционирования в районе датчиков.
Заявляемый способ позволяет осуществить прицельную остановку головы поезда у границы произвольной рельсовой цепи с обеспечением соответствия требованию, исключающего выезд неисправной подвижной единицы на ограждаемый объект.
В конечном итоге, отпадает необходимость отнесения первого и основного датчика УКСПС на дополнительное расстояние, равное длине поезда и установке второго дополнительного датчика УКСПС, при этом появляется возможность обеспечивать штатную работу устройства УКСПС для пропуска поездов любой длины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ, ДОПУСКАЮЩИЙ НАХОЖДЕНИЕ ДВУХ ПОЕЗДОВ НА ОДНОМ БЛОК-УЧАСТКЕ, СОСТОЯЩЕМ ИЗ НЕСКОЛЬКИХ КООРДИНАТНЫХ ОТРЕЗКОВ | 2021 |
|
RU2768305C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2768303C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ КООРДИНАТНЫХ ОТРЕЗКОВ | 2021 |
|
RU2789420C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДОВ НА УЧАСТКЕ СБЛИЖЕНИЯ С ПРЕПЯТСТВИЕМ | 2019 |
|
RU2723572C1 |
| СПОСОБ ПРИЦЕЛЬНОЙ ОСТАНОВКИ ПОЕЗДА НА УЧАСТКЕ ПУТИ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2020 |
|
RU2751589C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ КООРДИНАТНЫХ ОТРЕЗКОВ БЕЗ БЛОК-УЧАСТКОВ И ПУТЕВЫХ СВЕТОФОРОВ | 2021 |
|
RU2789232C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| Система определения подвижных единиц с нарушением нижнего габарита при движении длинносоставных поездов | 2017 |
|
RU2669721C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА, МАНЕВРОВОГО СОСТАВА ИЛИ ОДИНОЧНОГО ЛОКОМОТИВА ПО СТАНЦИИ И НА ПОДХОДАХ К НЕЙ | 2007 |
|
RU2352487C1 |
Изобретение относится к методам контроля схода подвижного состава. В способе устанавливают датчик устройства контроля схода подвижного состава на заданное расстояние от границы участка с ограждаемым объектом, после срабатывания датчика устройства контроля схода подвижного состава начинают служебное торможение. При этом железнодорожный путь разбивают на участки, контролируемые рельсовыми цепями, при срабатывании датчика устройства контроля схода подвижного состава проверяют информацию о занятых рельсовых цепях в момент срабатывания датчика устройства контроля схода подвижного состава и в предыдущее время, а также факт отсутствия при этом нарушения нижнего габарита в пределах расстояния, равного длине одной или нескольких рельсовых цепей с головы поезда, определяют точку прицельного торможения головы поезда, удаленную от головы поезда на расстояние, превышающее длину служебного торможения с максимально установленной скорости до полной остановки с учетом времени восприятия машинистом информации о срабатывании датчика устройства контроля схода подвижного состава, а также времени определения местоположения неисправной подвижной единицы в составе поезда, начинают служебное торможение с остановкой перед ограждаемым объектом неисправной подвижной единицы в составе поезда. Достигается повышение точности остановки неисправной подвижной единицы перед ограждаемым объектом. 1 з.п. ф-лы, 3 ил.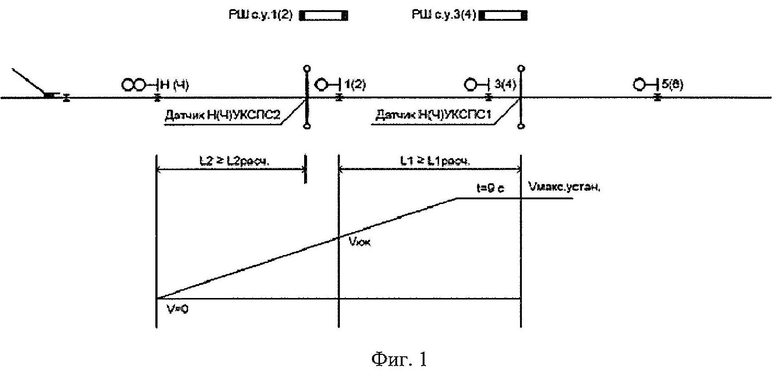
1. Способ работы устройства контроля схода подвижного состава, заключающийся в том, что устанавливают датчик устройства контроля схода подвижного состава на заданное расстояние от границы участка с ограждаемым объектом, после срабатывания датчика устройства контроля схода подвижного состава начинают служебное торможение, отличающийся тем, что железнодорожный путь разбивают на участки, контролируемые рельсовыми цепями, при срабатывании датчика устройства контроля схода подвижного состава проверяют информацию о занятых рельсовых цепях в момент срабатывания датчика устройства контроля схода подвижного состава и в предыдущее время, а также факт отсутствия при этом нарушения нижнего габарита в пределах расстояния, равного длине одной или нескольких рельсовых цепей с головы поезда, определяют точку прицельного торможения головы поезда, удаленную от головы поезда на расстояние, превышающее длину служебного торможения с максимально установленной скорости до полной остановки с учетом времени восприятия машинистом информации о срабатывании датчика устройства контроля схода подвижного состава, а также времени определения местоположения неисправной подвижной единицы в составе поезда, начинают служебное торможение с остановкой перед ограждаемым объектом неисправной подвижной единицы в составе поезда.
2. Способ работы по п. 1, отличающийся тем, что для определения ординаты установки датчика устройства контроля схода подвижного состава от границы рельсовой цепи с ограждаемым объектом отсчитывают сумму расстояний, равных длине служебного торможения с максимально установленной скорости до полной остановки и расстоянию, проходимому поездом за суммарное время, необходимое для восприятия машинистом информации о срабатывании датчика устройства контроля схода подвижного состава, причем к сумме расстояний дополнительно прибавляют расстояние, учитывающее разность длин рельсовых цепей в пределах тормозного пути поезда, после чего полученную ординату округляют в большую сторону до границы текущей рельсовой цепи.
| "УКСПС НА УЧАСТКАХ АБ И ПАБ" (https://web.archive.org/web/20131025043239/http://static.scbist.com/scb/konspekt/136_YKSPS.pdf) найдено в интернет, опубликовано 25.10.2013, по данным - web.archive.org | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Винтовой безударный прибор для разгонки зазоров железнодорожных рельсов | 1925 |
|
SU2586A1 |
