Изобретение относится к области железнодорожного транспорта, а именно к способам и устройствам для прицельной остановки состава поезда с позиционированием любого конструктивного элемента любой из подвижных единиц поезда относительно некоторой произвольной точки на маршруте следования поезда, и может использоваться, например, для остановки пассажирского железнодорожного транспорта на тупиковых железнодорожных путях или на закрытых платформах станций, а также для автоматизации процессов остановки и закрепления состава грузового поезда на приемоотправочных станционных путях или на любых других путях.
Известны способы и устройства для осуществления прицельной остановки поезда относительно некоторой точки на маршруте следования поезда, которые используют размещаемые вдоль маршрута следования поезда специальные устройства, например RFID-метки, или устройства типа "бализа" для передачи на локомотив значения расстояния, оставшегося до остановки состава поезда. При считывании этой информации локомотивные устройства безопасности (БЛОК, КЛУБ, САУТ или др.) или устройства автоведения поезда в соответствии с кривыми торможения производят торможение и остановку поезда. Например, патент JP 4053959 «Устройство управления остановкой постоянного положения» (опубликовано 27.02.2008) или патент RU 2397094 «Способ и система прицельной остановки железнодорожных транспортных средств» (опубликовано 20.08.2010).
Недостатком этих способов и устройств является необходимость оснащения всех локомотивов поездов, обращающихся на данном участке дорог, дополнительным однотипным оборудованием, например считывателями RFID-меток, или другим подобным оборудованием. Кроме того, точная остановка состава поезда возможна только в положении, когда считыватель информации, установленный на локомотиве, будет находиться в непосредственной близости (непосредственно напротив) размещаемых вдоль маршрута следования поезда специальных устройств, например, RFID-меток, или устройств типа "бализа". То есть точная остановка поезда возможна только в некоторых фиксированных точках на маршруте следования состава поезда, в которых установлены эти специальные устройства.
Известна система «ПРИЗМА-К» для автоматической остановки пассажирских поездов на тупиковых железнодорожных путях (http://dokltd.ru/products/a20192), в которой расстояние до головы поезда при его остановке в режиме реального времени измеряют всепогодным радаром ИДС-76. Затем, также в режиме реального времени, вычисляют расстояние, оставшееся до остановки поезда в некоторой заданной точке маршрута и передают значение этого расстояния посредством соответствующего радиоканала связи в локомотивные устройства обеспечения безопасности (например, БЛОК, КЛУБ, САУТ, устройство автоведения поезда). Локомотивные устройства безопасности на основе кривых торможения и соответствующих характеристик тормозных устройств поезда проводят торможение и остановку поезда в заданной точке маршрута. Это позволяет повысить безопасность и существенно сократить время, необходимое для остановки поезда.
Известны предикторы для измерения в режиме реального времени расстояния до поезда, а точнее расстояния от точки подключения предиктора к рельсам до первой колесной пары поезда (https://studwood.ru/1717142/tehnika/prediktory), (https://usermanual.wiki/Ge-Appliances/GeHxp3Pmd4UsersManual648613.1754442098.pdf), (Гаврилюк, В.И. Повышение точности определения положения поезда на участке приближения к переезду / В.И. Гаврилюк, О.М. Возняк, В.В. Мелешко // Наука та прогрес транспорту. Вiсник Днiпропетровського нацiонального унiверситету залiзничного транспорту. - 2016. - №1 (61)). Предикторы подключают к рельсовым линиям параллельно генераторам и/или приемникам рельсовых цепей в том месте, где подключают к рельсам оборудование рельсовых цепей.
Радары и предикторы являются всепогодными, достаточно простыми и надежными устройствами, обеспечивают измерение расстояния до поезда независимо от его скорости, возможной остановки и изменения направлений движения.
Однако использование радаров или предикторов в устройствах прицельной остановки поезда не обеспечивает остановку поезда с необходимой точностью позиционирования относительно произвольной точки на маршруте следования.
Известна подсистема прицельной остановки поезда, входящая в состав автоматизированной системы управления устройствами закрепления поезда (патент RU №2598919 B61L 7/00, опубл. 10.10.2016, бюл. №28). Подсистема прицельной остановки поезда снабжена пунктом определения колесной пары, пунктами определения длины состава, путевыми ретрансляторами сигналов и устройствами отображения. Подсистема прицельной остановки поезда построена на основе применения напольной аппаратуры счета осей из состава устройств системы контроля состояния свободности станционных участков пути методом счета осей подвижного состава. В состав подсистемы прицельной остановки поезда входят: напольные устройства с пунктами счета осей и с путевыми ретрансляторами сигналов; устройства отображения. Каждый пункт счета осей содержит: путевой датчик; блок напольного счетного устройства, обрабатывающий сигналы, формируемые путевым датчиком, а также подсчитывающий проследовавшие оси подвижного состава и передающий полученную информацию на единый контроллер; соединительную коробку; кабельную муфту. Пункты определения длины состава размещены на каждом приемоотправочном пути станции на расстоянии не менее 100 м от крайнего пункта счета осей в составе пункта определения колесной пары. С помощью путевых ретрансляторов сигналов удаленные пункты счета осей подключены к единому контроллеру. Остановка поезда машинистом в требуемом месте осуществляется по показаниям устройств отображения.
Прицельную остановку поезда производят с позиционированием некоторой конкретной «целевой» колесной пары любой из подвижных единиц поезда относительно некоторой произвольной точки на маршруте следования поезда, ограждаемой, по меньшей мере, двумя датчиками регистрации прохода колеса, расположенными друг от друга на расстоянии меньшем минимально возможного расстояния между колесными парами существующих железнодорожных подвижных единиц. Остановку поезда в требуемом месте осуществляет машинист по показаниям устройств отображения.
Недостатком указанной подсистемы прицельной остановки поезда, входящей в состав автоматизированной системы управления устройствами закрепления поезда, является то, что в этом техническом решении не предусмотрены средства для предварительного определения расстояния от первой колесной пары поезда до закрепляемой колесной пары и средства для контроля в режиме реального времени расстояния, оставшегося до остановки состава поезда. Это требует движения поезда по станционным или другим путям с минимальной скоростью на большом расстоянии, что приводит к большим затратам времени, необходимого для остановки поезда в требуемой точке маршрута.
В качестве прототипа заявляемых системы и способа остановки поезда на участке пути выбрана известная подсистема прицельной остановки поезда, входящая в состав автоматизированной системы закрепления железнодорожного подвижного состава (патент RU №2706751, B61K 7/00, B61L 25/00, опубл. 20.11.2019. Бюл. №32), и способ работы этой подсистемы.
Подсистема прицельной остановки поезда содержит, по меньшей мере, один контроллер и связанные с ним средства для идентификации типов подвижных единиц, пункт фиксации момента входа поезда в зону прицельной остановки, пункт регистрации колеса в зоне закрепления, устройства передачи данных на локомотив и средства дистанционного контроля положения закрепляемой колесной пары в зоне устройств закрепления. Средства для идентификации типов подвижных единиц поезда содержат рельсовую цепь наложения и, по меньшей мере, два датчика регистрации прохода колеса, расположенные друг от друга на расстоянии, меньшем минимально возможного расстояния между двумя колесными парами всех существующих подвижных железнодорожных единиц. Пункт фиксации момента входа поезда в зону прицельной остановки содержит, по меньшей мере, один датчик регистрации прохода колеса, либо изоляционный стык рельсовой цепи, ограничивающие, соответственно, границу станционного пути, на который принимается закрепляемый подвижной состав. Пункт регистрации колеса в зоне закрепления содержит, по меньшей мере, два датчика регистрации прохода колеса. Устройства передачи данных на локомотив содержат путевые устройства системы автоматического управления тормозами. Устройства передачи данных на локомотив выполнены в виде устройств отображения, установленных вдоль каждого станционного пути с механизированными устройствами закрепления. Устройства передачи данных на локомотив содержат радиоканал, связанный с контроллером и бортовым устройством отображения в кабине локомотива для передачи машинисту информации о расстоянии закрепляемой оси поезда до устройств закрепления. Контроллер предназначен для сбора всей необходимой информации, ее обработки и выдачи соответствующих команд для обеспечения прицельной остановки поезда.
Для осуществления прицельной остановки поезда производится определение межосевых расстояний, расстояния от целевой колесной пары до первой колесной пары поезда. Для контроля в реальном времени расстояния, оставшегося до остановки поезда, при помощи двух датчиков регистрации прохода колеса, расположенных друг от друга на расстоянии, меньшем минимально возможного расстояния двух колесных пар всех существующих подвижных железнодорожных единиц, определяют сначала скорость соответствующей подвижной единицы поезда, а затем и все соответствующие межосевые расстояния.
Недостатком известной подсистемы прицельной остановки поезда и способа ее работы является определение межосевых расстояний, расстояния от целевой колесной пары до первой колесной пары поезда и для контроля в реальном времени расстояния, оставшегося до остановки поезда известными в уровне техники методами, в которых при помощи двух датчиков регистрации прохода колеса, расположенных друг от друга на расстоянии, меньшем минимально возможного расстояния двух колесных пар всех существующих подвижных железнодорожных единиц, определяют сначала скорость соответствующей подвижной единицы поезда, а затем и все соответствующие межосевые расстояния. В случае неравномерного движение поезда над этими датчиками колеса, возникают значительные ошибки в определении соответствующих расстояний, а в случае непредвиденной остановки поезда при проходе над этими датчиками состава поезда, измерение каких-либо расстояний этим методом вообще становится невозможным.
Поиск и анализ известных из уровня техники решений показал, что универсального всепогодного и надежного способа и какого-либо многофункционального устройства, позволяющего при небольших затратах оборудования и времени осуществлять точную остановку поезда с позиционированием некоторой колесной пары любой из подвижных единиц поезда, выбранной в качестве «целевой» колесной пары поезда, или любого другого конструктивного элемента любой из подвижных единиц поезда на известном расстоянии от целевой колесной пары относительно некоторой произвольной точки на маршруте следования поезда, на момент подачи настоящей заявки не обнаружено.
Технической задачей заявляемого изобретения является создание способа и на его основе надежной всепогодной системы для точной остановки поезда с расширенными функциональными возможностями применения.
Техническим результатом, на который направлено заявляемое изобретение, является расширение функциональных возможностей применения и повышение точности остановки подвижного состава относительно любой заданной точки на маршруте следования поезда.
Для решения технической задачи и достижения технического результата разработаны способ прицельной остановки поезда на участке пути и система для осуществления этого способа.
В способе прицельной остановки поезда на участке пути, ограниченном изоляционными стыками рельсовой цепи и/или реверсивными датчиками колеса, включающем использование информационной модели поезда, устройств, расположенных в некоторых точках вдоль направления следования поезда и предназначенных для измерения в режиме реального времени расстояния от мест установки этих устройств до начала поезда, где за начало поезда принимается первая колесная пара первого локомотива поезда, выбор целевой колесной пары поезда, выбор некоторой точки прицельной остановки поезда относительно маршрута следования, применение средств передачи данных на локомотив и, по меньшей мере, одного контроллера, вычисляющего в режиме реального времени расстояние, оставшееся до остановки поезда, и подключенного к устройствам электрической централизации, к средствам получения информационной модели поезда, к устройствам измерения расстояния до поезда и к средствам передачи данных на локомотив, согласно изобретению, на пути следования поезда на некотором расстоянии / до точки, относительно которой должен быть остановлен поезд, на рельсах дополнительно устанавливают, по меньшей мере, один дополнительный реверсивный датчик колеса, подключенный к контроллеру, предварительно определяют по информационной модели поезда расстояние  от целевой колесной пары до первой колесной пары поезда и расстояние
от целевой колесной пары до первой колесной пары поезда и расстояние  которое должен пройти локомотив от соответствующей границы участка пути до остановки, где S1 и S2 - расстояния от соответствующих границ участка пути, на которые входит поезд, до точки прицельной остановки поезда на маршруте следования, относительно которой производят остановку поезда, а в моменты прохода первой колесной парой поезда одной из границ участка пути и дополнительного реверсивного датчика колеса устройствами измерения определяют расстояние Sизм от мест установки этих устройств до начала поезда и контроллером вычисляют суммарную ошибку измерения этих расстояний ΔS*=Sизм-S*, где S*=(S1+S2) для моментов прохода первой колесной парой любой из границ участка пути и
которое должен пройти локомотив от соответствующей границы участка пути до остановки, где S1 и S2 - расстояния от соответствующих границ участка пути, на которые входит поезд, до точки прицельной остановки поезда на маршруте следования, относительно которой производят остановку поезда, а в моменты прохода первой колесной парой поезда одной из границ участка пути и дополнительного реверсивного датчика колеса устройствами измерения определяют расстояние Sизм от мест установки этих устройств до начала поезда и контроллером вычисляют суммарную ошибку измерения этих расстояний ΔS*=Sизм-S*, где S*=(S1+S2) для моментов прохода первой колесной парой любой из границ участка пути и  для моментов прохода первой колесной парой над дополнительным реверсивным датчиком колеса, соответственно, в зависимости от стороны с которой поезд входит на участок пути для остановки, далее расстояние, измеряемое средствами измерения в режиме реального времени с учетом этих ошибок S=Sизм-ΔS*, используют для расчета расстояния, которое должен пройти поезд до его остановки
для моментов прохода первой колесной парой над дополнительным реверсивным датчиком колеса, соответственно, в зависимости от стороны с которой поезд входит на участок пути для остановки, далее расстояние, измеряемое средствами измерения в режиме реального времени с учетом этих ошибок S=Sизм-ΔS*, используют для расчета расстояния, которое должен пройти поезд до его остановки  или
или  соответственно, в зависимости от стороны с которой поезд входит на участок пути для остановки, и в режиме реального времени с заданной периодичностью передают величину рассчитываемого расстояния на локомотив, затем в момент прохода целевой колесной пары над дополнительным реверсивным датчиком колеса, по меньшей мере, еще один раз определяют ошибку измерения
соответственно, в зависимости от стороны с которой поезд входит на участок пути для остановки, и в режиме реального времени с заданной периодичностью передают величину рассчитываемого расстояния на локомотив, затем в момент прохода целевой колесной пары над дополнительным реверсивным датчиком колеса, по меньшей мере, еще один раз определяют ошибку измерения  соответственно, в зависимости от стороны с которой поезд входит на участок пути для остановки, после этого расчет расстояния, которое должен пройти поезд до его остановки проводят в режиме реального времени уже с учетом этой ошибки измерения и передают величину этого расстояния на локомотив с заданной периодичностью, руководствуясь полученными данными, осуществляют торможение и остановку поезда в ручном или в автоматическом режиме.
соответственно, в зависимости от стороны с которой поезд входит на участок пути для остановки, после этого расчет расстояния, которое должен пройти поезд до его остановки проводят в режиме реального времени уже с учетом этой ошибки измерения и передают величину этого расстояния на локомотив с заданной периодичностью, руководствуясь полученными данными, осуществляют торможение и остановку поезда в ручном или в автоматическом режиме.
В системе для прицельной остановки поезда на участке пути, ограниченном изоляционными стыками рельсовой цепи и/или реверсивными датчиками колеса, содержащей средства для получения информационной модели поезда, устройства, расположенные в некоторых точках вдоль направления следования поезда и предназначенные для измерения в режиме реального времени расстояния от мест установки этих устройств до начала поезда, одну из колесных пар одной из подвижных единиц поезда, принимаемую за целевую колесную пару поезда, некоторую точку прицельной остановки поезда относительно маршрута следования поезда, средства передачи данных на локомотив, и, по меньшей мере, один контроллер, вычисляющий в режиме реального времени расстояние, оставшееся до остановки поезда, и подключенный к устройствам электрической централизации, к средствам получения информационной модели поезда, к устройствам измерения расстояния до поезда и к средствам передачи данных на локомотив, согласно изобретению, в систему включен, по меньшей мере, один дополнительный реверсивный датчик колеса, подключенный к контроллеру и установленный на рельсах на пути следования поезда на некотором расстоянии / до точки, относительно которой должен быть остановлен поезд.
Средства для получения информационной модели поезда могут содержать рельсовую цепь наложения и, по меньшей мере, два датчика регистрации прохода колеса, подключенные к контроллеру, содержащему базу данных существующих типов железнодорожных подвижных единиц с указанием количества колесных пар каждого типа подвижной единицы, межосевых расстояний колесных пар, расстояний от осей крайних колесных пар до осей автосцепок и расстояний между осями автосцепок, при этом датчики регистрации прохода колеса расположены друг от друга на расстоянии, меньшем минимально возможного расстояния между двумя колесными парами существующих подвижных железнодорожных единиц.
Средства для получения информационной модели состава поезда могут содержать оборудование для формирования, передачи и приема телеграммы-натурного листа, при этом контроллер содержит базу данных всех типов железнодорожных подвижных единиц, обращаемых на данном участке, с указанием количества колесных пар каждого типа подвижной единицы, межосевых расстояний колесных пар, расстояний от осей крайних колесных пар до осей автосцепок и расстояний между осями автосцепок каждой подвижной единицы.
Средства для получения информационной модели состава поезда могут содержать последовательно размещенные на пути следования поезда реверсивные точечные путевые датчики колеса, подключенные к контроллеру и образующие несколько контролируемых участков пути заданной длины.
Устройства, предназначенные для измерения в режиме реального времени расстояния от мест установки этих устройств до начала поезда, могут содержать радиолокационные устройства.
Устройства, предназначенные для измерения в режиме реального времени расстояния от мест установки этих устройств до начала поезда, могут содержать предикторы, например, PDM-3 или НХР 3, подключенные к рельсовым линиям.
Средства передачи данных на локомотив могут содержать путевые устройства отображения, связанные с контроллером и установленные вдоль участка пути, на котором должен быть остановлен поезд.
Средства передачи данных на локомотив могут содержать радиоканал для связи контроллера с локомотивными устройствами обеспечения безопасности движения и/или с бортовым устройством отображения в кабине локомотива для передачи информации машинисту о расстоянии, оставшемся до остановки состава поезда.
Средства передачи данных на локомотив могут содержать путевые устройства системы автоматического управления тормозами.
Назначение и аппаратурная реализация используемого оборудования.
Информационная модель поезда предназначена для определения расстояния от целевой колесной пары одной из подвижных единиц поезда до головы (первой колесной пары первого локомотива) поезда. Информационная модель поезда может быть получена с помощью средств для получения информационной модели состава поезда. Это могут быть средства для идентификации типов проходящих подвижных единиц поезда, например, два датчика регистрации прохода колеса, расположенные на небольшом расстоянии друг от друга, значение которого меньше минимально возможного межосевого расстояния, или считыватель идентификаторов подвижных единиц поезда, предпочтительно размещенный на подъездных путях к станции на расстоянии не менее максимально возможной длины принимаемых на данной станции поездов, или сразу после входных светофоров станции. Получение информационной модели поезда и определение соответствующих расстояний, измеряемых дискретно в единицах количества осей от первой колесной пары до целевой колесной пары, осуществляют, например, с использованием реверсивных датчиков колеса, ограждающих участки пути заданной длины и располагаемых в определенной последовательности. Также информационная модель поезда может быть получена с помощью телеграммы-натурного листа из соответствующих средств его получения, подключенных к контроллеру, а также из средств для формирования телеграммы-натурного листа, передачи и приема. При этом в контроллер заносят базу данных всех типов железнодорожных подвижных единиц, обращаемых на данном участке, с указанием количества колесных пар каждого типа подвижной единицы, межосевых расстояний колесных пар, расстояний от осей крайних колесных пар до осей автосцепок и расстояний между осями автосцепок каждой подвижной единицы.
В качестве устройств, предназначенных для измерения в режиме реального времени расстояния от этих устройств до головы поезда, то есть до первого локомотива поезда, применяют, например, всепогодный радар ИДС-76 (http://dokltd.ru/products/a20192) или предикторы (https://studwood.ru/1717142/tehnika/prediktory).
В качестве «любых других конструктивных элементов состава поезда» для его позиционирования кроме целевой колесной пары могут быть использованы, например, такие элементы, как сцепки между вагонами, сцепка между вагоном и локомотивом, дверные проемы пассажирских вагонов, кодовые бортовые датчики КБД-2 для идентификации подвижного состава.
Точками позиционирования на маршруте следования поезда, относительно которых с требуемой точностью должен быть остановлен поезд, могут выступать, например: устройства автоматического закрепления состава поезда, различное перегонное диагностическое оборудование, дверные проемы закрытых станций метро.
По меньшей мере, один реверсивный датчик колеса, дополнительно установленный на некотором известном расстоянии  до точки, относительно которой должен быть остановлен поезд, предназначен для повышения точности остановки подвижного состава поезда относительно любой заданной произвольной точки маршрута посредством устранения суммарной ошибки измерения расстояния до поезда (до первой колесной пары поезда), которая определяется погрешностью используемой информационной модели поезда, погрешностью применяемых средств измерения расстояния до поезда и некоторыми отличиями элементов и их конструктивных размеров разных локомотивов, применяемых в разных поездах.
до точки, относительно которой должен быть остановлен поезд, предназначен для повышения точности остановки подвижного состава поезда относительно любой заданной произвольной точки маршрута посредством устранения суммарной ошибки измерения расстояния до поезда (до первой колесной пары поезда), которая определяется погрешностью используемой информационной модели поезда, погрешностью применяемых средств измерения расстояния до поезда и некоторыми отличиями элементов и их конструктивных размеров разных локомотивов, применяемых в разных поездах.
В качестве средств передачи данных на локомотив используют, например: путевые устройства системы автоматического управления тормозами (САУТ), устройства отображения (специальные цифровые информационные щиты), установленные на некотором расстоянии друг от друга вдоль участка пути, где с высокой точностью необходимо остановить поезд, устройства передачи данных по соответствующему радиоканалу, связанные с контроллером и с бортовым устройством отображения в кабине локомотива для передачи информации машинисту о расстоянии оставшемся до остановки поезда, или соответствующий радиоканал (передатчик и приемник), связанные соответственно с контроллером и с локомотивными устройствами обеспечения безопасности движения (например: БЛОК, КЛУБ, САУТ, устройство автоматического ведения поезда).
Сущность изобретения поясняется чертежами.
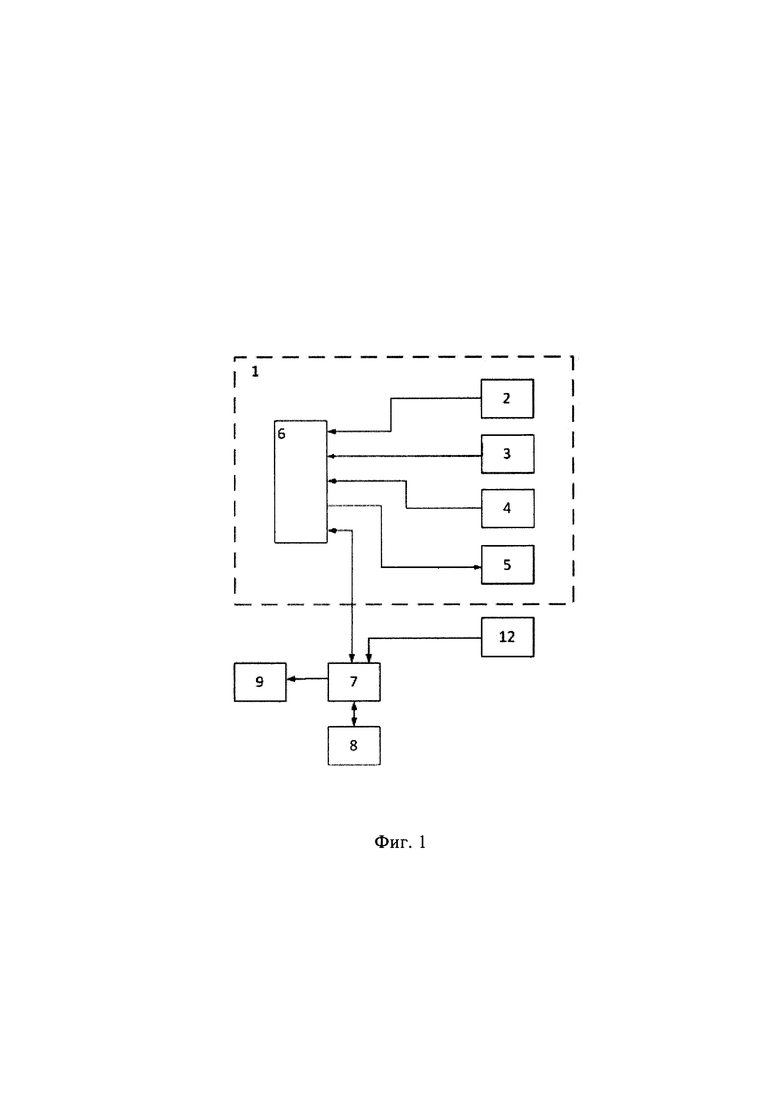
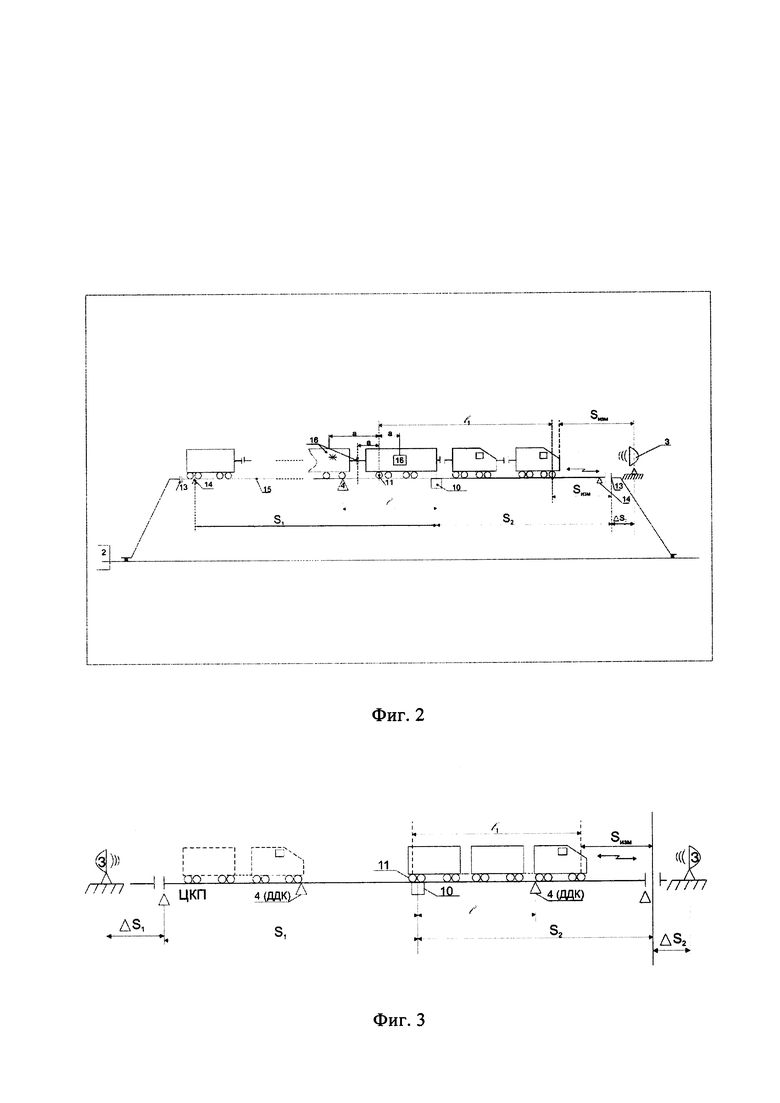
На фиг. 1 представлена структурная схема системы 1 прицельной остановки поезда на участке пути, ограниченном изоляционными стыками рельсовой цепи и/или датчиками колеса, и его увязка с устройствами электрической централизации и с устройством отображения диагностической информации, расположенным на месте дежурного по станции; на фиг. 2 представлена схема размещения на станционном участке пути оборудования, необходимого для точной остановки поезда; на фиг. 3 представлен поезд, приближающийся к точке своей остановки.
Система 1 остановки поезда на участке пути (фиг. 1) содержит контроллер 6, к которому подключены: средства 2 для получения информационной модели состава поезда; средства (устройства) 3 для измерения расстояния от места их установки до первого локомотива поезда; по меньшей мере, один дополнительный датчик колеса 4; средства передачи данных на локомотив 5. Контроллер 6 предназначен для вычисления в режиме реального времени расстояния, оставшегося до остановки поезда.
Контроллер 6 посредством соответствующих цепей увязки 7 связан также с устройствами электрической централизации 8, с устройством отображения диагностической информации 9 у дежурного по станции и со средствами 12 дистанционного контроля наличия целевой колесной пары в заданной точке (зоне) прицельной остановки 10 (фиг. 2-3) на маршруте следования поезда, относительно которой должен быть остановлен поезд. Электрическая централизация включает, в том числе, изоляционные стыки рельсовых цепей 13 (фиг. 2) и/или датчики колеса 14, ограждающие участок пути 15, где должен быть остановлен состав поезда.
На схеме размещения на станционном участке пути оборудования, необходимого для точной остановки поезда (фиг. 2), показаны: средства для получения информационной модели состава поезда 2; возможные точки позиционирования 16 поезда на известном расстоянии «а» относительно целевой колесной пары 11; точка прицельной остановки 10 на маршруте следования поезда, относительно которой с высокой точностью должна находиться целевая колесная пара 11 остановленного поезда. Также на фиг. 2 показаны: возможный вариант размещения радиолокационных устройств, представляющих собой средства 3 для измерения расстояния от места их установки до первого локомотива поезда (в качестве радиолокационных устройств может быть использован, например, всепогодный радар ИДС-76); по меньшей мере, один дополнительный датчик колеса 4; расстояние  от дополнительного датчика колеса 4 до точки прицельной остановки 10; расстояние
от дополнительного датчика колеса 4 до точки прицельной остановки 10; расстояние  от целевой колесной пары 11 до первой колесной пары поезда; расстояния S1 и S2 от точки прицельной остановки 10 на маршруте следования поезда до границ участка пути, до устройств 13 и/или 14; расстояние Sизм от места установки соответствующих средств измерения (или закрепления их к рельсовым линиям) до головы поезда, измеряемое в реальном масштабе времени.
от целевой колесной пары 11 до первой колесной пары поезда; расстояния S1 и S2 от точки прицельной остановки 10 на маршруте следования поезда до границ участка пути, до устройств 13 и/или 14; расстояние Sизм от места установки соответствующих средств измерения (или закрепления их к рельсовым линиям) до головы поезда, измеряемое в реальном масштабе времени.
Для обоснования формул расчета в реальном масштабе времени расстояния, оставшегося до остановки поезда, по мере приближения целевой колесной пары 11 к точке прицельной остановки 10 относительно маршрута следования поезда на фиг. 3 представлен поезд, приближающийся к точке своей остановки (в частном случае, относительно устройств закрепления состава поезда).
Описание работы предлагаемого способа прицельной остановки поезда на участке пути и системы для осуществления этого способа.
Уравнение для расчета в реальном масштабе времени расстояния, оставшегося до остановки поезда в точке прицельной остановки 10, в общем случае (для всех вариантов реализации) можно составить исходя из того, что расстояние Sизм (фиг. 3), измеренное используемыми средствами для измерения расстояния 3 от места их установки до первой колесной пары поезда, с учетом суммарной ошибки измерения этого расстояния ΔS* всегда больше или равно  .
.

где:
 - расстояние от первой колесной пары поезда (ПКПП) до целевой колесной пары (ЦКП) поезда;
- расстояние от первой колесной пары поезда (ПКПП) до целевой колесной пары (ЦКП) поезда;
S2 - расстояние от средств измерения, расположенных по направлению движения поезда (впереди приближающегося поезда), до первой колесной пары поезда (ПКПП головного локомотива).
При равенстве обоих частей уравнения (1) целевая колесная пара (ЦКП) будет находиться непосредственно в заданной точке маршрута. Исходя из этого расстояние, оставшееся до остановки поезда в заданной точке маршрута, с учетом данных, поступающих в реальном масштабе времени от средств 3, используемых для измерения расстояния от места их установки до поезда, будет определяться выражением:

Исходя из возможных вариантов информационной модели поезда, при использовании формулы (2) объективно возможны два случая:
1. Когда  известно в линейных единицах (в метрах и/или сантиметрах). Будем рассматривать его, как случай применения идеальной информационной модели поезда.
известно в линейных единицах (в метрах и/или сантиметрах). Будем рассматривать его, как случай применения идеальной информационной модели поезда.
2. Когда  известно в дискретных единицах. А именно, когда при проходе поезда на участке формирования информационной модели поезда установлены только следующие признаки: общее количество подвижных единиц в поезде; какая из подвижных единиц является вагоном, а какая - локомотивом; количество осей в каждой подвижной единице; порядковый номер целевой колесной пары (Nцкп) относительно первой колесной пары поезда (ПКПП). Будем рассматривать этот случай, как случай применения приближенной информационной модели поезда (ПИМП).
известно в дискретных единицах. А именно, когда при проходе поезда на участке формирования информационной модели поезда установлены только следующие признаки: общее количество подвижных единиц в поезде; какая из подвижных единиц является вагоном, а какая - локомотивом; количество осей в каждой подвижной единице; порядковый номер целевой колесной пары (Nцкп) относительно первой колесной пары поезда (ПКПП). Будем рассматривать этот случай, как случай применения приближенной информационной модели поезда (ПИМП).
Объективно более сложным представляется вариант 2. Для этого случая приближенное значение расстояния от целевой колесной пары (ЦКП) до первой колесной пары (ПКПП) поезда в линейных единицах (в метрах) можно представить только приближенно:  , где Sсp - некоторое условно принятое усредненное расстояние между колесными парами (КП) в поездах. Значение ~
, где Sсp - некоторое условно принятое усредненное расстояние между колесными парами (КП) в поездах. Значение ~ в этом уравнении содержит достаточно большую погрешность. Поэтому для точной прицельной остановки поезда при использовании приближенной информационной модели поезда (ПИМП) на одном из этапов прицельной остановки поезда необходимо значение расстояния от целевой колесной пары (ЦКП) до первой колесной пары поезда (ПКПП), известное как
в этом уравнении содержит достаточно большую погрешность. Поэтому для точной прицельной остановки поезда при использовании приближенной информационной модели поезда (ПИМП) на одном из этапов прицельной остановки поезда необходимо значение расстояния от целевой колесной пары (ЦКП) до первой колесной пары поезда (ПКПП), известное как  преобразовать в точное расстояние, выраженное в метрах и сантиметрах. Без этого точная прицельная остановка поезда за возможно короткий промежуток времени даже теоретически становится невозможной.
преобразовать в точное расстояние, выраженное в метрах и сантиметрах. Без этого точная прицельная остановка поезда за возможно короткий промежуток времени даже теоретически становится невозможной.
В связи с этим, сначала рассмотрим работу предлагаемой системы прицельной остановки поезда в случае использования приближенной информационной модели поезда (случай 2).
Для случая (2), в свою очередь, возможны два варианта аппаратурной реализации прицельной остановки поезда. Вариант, когда граница участка пути, где останавливают поезд, ограничена только изолирующими стыками (изостыками) соответствующих рельсовых цепей, будем рассматривать как вариант 2а. Вариант, когда участок пути, где останавливают поезд, ограничен реверсивными датчиками колеса (ДК), будем рассматривать его как вариант 2б.
При этом для обоих вариантов реализации случая (2) по мере приближения поезда к точке своей остановки на пути его следования имеются, по меньшей мере, две точки: одна точка - соответствующая граница участка пути (13 и/или 14 на фиг. 2), где останавливают поезд; другая точка (или другие возможные точки), - по меньшей мере, один дополнительно установленный реверсивный датчик колеса (4 на фиг. 2 и фиг. 3), точное расстояние от которых до используемых средств измерения известно: В моменты их прохождения первой колесной парой поезда расстояние до поезда может быть измерено используемыми средствами измерения, и в этих точках может быть определена суммарная ошибка измерения соответствующих расстояний применяемыми средствами измерения:
- для первой точки - при вступлении первой колесной пары поезда на сам участок, где поезд должен быть остановлен (при проходе первой колесной пары поезда первой границы участка), по данным используемых средств (устройств) измерения определяют расстояние до поезда Sизм.гр. (измеренное расстояние до границы) и вычисляют суммарную ошибку ΔS* измерения этими средствами расстояния до первой колесной пары поезда.
ΔS*=ΔSгр.*=Sизм.гр.-(S1+S2+ΔS2), где: S1 - расстояние от первой пересеченной границы участка пути до точки позиционирования поезда на участке пути (в рассматриваемом частном случае до устройств закрепления поезда), S2 - расстояние от точки позиционирования поезда на участке пути до второй границы участка пути, ΔS2 - расстояние от места установки радиолокационного устройства измерения расстояния до поезда до соответствующей (в данном частном случае до второй) границы участка пути. В случае измерения расстояния до поезда предиктором ΔS2=0.
- для второй точки при проходе первой колесной пары поезда, по меньшей мере, одного дополнительного реверсивного датчика колеса 4 (ДДК) (фиг. 2 и фиг. 3) в общем случае, также по данным средств измерения определяют расстояние от точки установки этих средств до поезда Sизм.ддк. (измеренное расстояние до ДДК) и вычисляют суммарную уточненную ошибку ΔS* измерения этими средствами расстояния до первой колесной пары поезда  где
где  - расстояние от дополнительного реверсивного датчика колеса (ДДК) до устройств закрепления (в общем случае до точки позиционирования поезда на участке пути, относительно которой поезд должен быть остановлен).
- расстояние от дополнительного реверсивного датчика колеса (ДДК) до устройств закрепления (в общем случае до точки позиционирования поезда на участке пути, относительно которой поезд должен быть остановлен).
Работа предлагаемого способа и системы прицельной остановки поезда в случае использования приближенной информационной модели поезда, вариант 2а).
При вступлении первой колесной пары поезда на участок, где он должен быть остановлен (при проходе первой границы этого участка) по соответствующему сигналу, поступающему в контроллер 6 из электрической централизации, контроллер вводит (передает) в средства передачи информации на локомотив приближенное значение расстояния до остановки поезда равное  в том числе выводит его на устройства отображения, расположенные вдоль пути. Контроллер 6 по данным средств измерения определяет расстояние до поезда Sизм.гр. и вычисляет суммарную ошибку ΔS* измерения этого расстояния ΔS*=ΔSгр.*=Sизм.гр.-(S1+S2+ΔS2) используемыми средствами измерения расстояния до первой колесной пары поезда. Затем контроллер 6 в режиме реального времени с учетом показаний используемых средств измерения расстояния до поезда в соответствии с выражением (2) начинает вычислять (определять) оставшееся расстояние до остановки поезда и с некоторой, заранее заданной периодичностью передавать значение оставшегося расстояния до остановки поезда в средства передачи этих данных на локомотив.
в том числе выводит его на устройства отображения, расположенные вдоль пути. Контроллер 6 по данным средств измерения определяет расстояние до поезда Sизм.гр. и вычисляет суммарную ошибку ΔS* измерения этого расстояния ΔS*=ΔSгр.*=Sизм.гр.-(S1+S2+ΔS2) используемыми средствами измерения расстояния до первой колесной пары поезда. Затем контроллер 6 в режиме реального времени с учетом показаний используемых средств измерения расстояния до поезда в соответствии с выражением (2) начинает вычислять (определять) оставшееся расстояние до остановки поезда и с некоторой, заранее заданной периодичностью передавать значение оставшегося расстояния до остановки поезда в средства передачи этих данных на локомотив.
В случае использования предиктора расстояние до остановки поезда вычисляют по формуле:

или

При достижении первой колесной парой поезда, по меньшей мере, одного дополнительного датчика колеса (ДДК) контроллер 6 по данным средств измерения еще один раз определяет расстояние до поезда Sизм.ддк и уточненную суммарную ошибку ΔS* измерения этими средствами измерения расстояния от точки установки этих средств до первой колесной пары поезда  , где
, где  - расстояние от ДДК до устройств закрепления (в общем случае до точки позиционирования поезда 10 на участке пути, где он должен быть остановлен). ΔS2 в данном случае = 0, так как расстояние измеряется предиктором. Затем вычисление приближенного расстояния до остановки поезда в реальном масштабе времени контроллер проводит с учетом уточненной ошибки измерения Sддк*, вплоть до достижения целевой колесной парой (ЦКП) дополнительного датчика колеса (ДДК) и выводит значение этого расстояния с определенной периодичностью на средства передачи информации на локомотив.
- расстояние от ДДК до устройств закрепления (в общем случае до точки позиционирования поезда 10 на участке пути, где он должен быть остановлен). ΔS2 в данном случае = 0, так как расстояние измеряется предиктором. Затем вычисление приближенного расстояния до остановки поезда в реальном масштабе времени контроллер проводит с учетом уточненной ошибки измерения Sддк*, вплоть до достижения целевой колесной парой (ЦКП) дополнительного датчика колеса (ДДК) и выводит значение этого расстояния с определенной периодичностью на средства передачи информации на локомотив.

Далее, поскольку точное расстояние от места установки средств измерения до места установки дополнительного датчика колеса (ДДК) известно, и в общем случае  в момент прохода целевой колесной парой (ЦКП) над дополнительным датчиком колеса (ДДК) контроллер с учетом в этот момент данных о расстоянии от места установки используемых средств измерения до первой оси поезда вычисляет расстояние
в момент прохода целевой колесной парой (ЦКП) над дополнительным датчиком колеса (ДДК) контроллер с учетом в этот момент данных о расстоянии от места установки используемых средств измерения до первой оси поезда вычисляет расстояние  от первой колесной пары до целевой колесной пары (ЦКП) в линейных единицах (в метрах и сантиметрах) с погрешностью средств измерения, которая была ранее определена контроллером для этих же средств измерения при проходе дополнительного датчика колеса (ДДК) первой колесной парой поезда.
от первой колесной пары до целевой колесной пары (ЦКП) в линейных единицах (в метрах и сантиметрах) с погрешностью средств измерения, которая была ранее определена контроллером для этих же средств измерения при проходе дополнительного датчика колеса (ДДК) первой колесной парой поезда.
В общем случае  в линейных единицах (в метрах) будет определяться выражением:
в линейных единицах (в метрах) будет определяться выражением:

где:
 - расстояние
- расстояние  , выраженное в метрах;
, выраженное в метрах;
Sизм* - расстояние от используемых средств измерения расстояния до поезда (до первой оси поезда), полученное контроллером по данным от используемых средств измерения расстояния;
ΔS* - суммарная ошибка средств измерения, которая была ранее определена контроллером для этих же средств измерения при проходе дополнительного датчика колеса (ДДК) первой колесной парой поезда.
В случае применения предиктора

где:
Sизм* - измеренное предиктором расстояние до поезда в момент прохода целевой колесной пары (ЦКП) поезда над дополнительным датчиком колеса (ДДК);
ΔS* - суммарная ошибка измерения этого расстояния.
Начиная с этого момента контроллер в режиме реального времени по данным средств измерения расстояния определяет точное расстояние, оставшееся до остановки поезда в соответствии с выражением:

и с заданной периодичностью вводит его в средства передачи данных на локомотив 5 (фиг. 1). В соответствии с этими данными осуществляют торможение и остановку поезда в ручном или в автоматическом режиме.
Работа предлагаемого способа и системы прицельной остановки поезда в случае использования приближенной информационной модели поезда, вариант 2б).
В данном варианте используемого оборудования работа способа и системы в основном протекает, как и в предыдущем случае. Изменение заключается в том, что уже при проходе целевой колесной парой (ЦКП) реверсивного датчика колеса, установленного на границе участка, по сигналу из электрической централизации, или по сигналу от такого же датчика, непосредственно подключенного к контроллеру, контроллер 6 (фиг. 1) преобразует расстояние  известное (в дискретных единицах) как Nцкп в линейное расстояние (в метры и сантиметры).
известное (в дискретных единицах) как Nцкп в линейное расстояние (в метры и сантиметры).
Поскольку точное расстояние от места установки средств измерения до места установки датчика колеса на границе участка пути также известно и равно =S1+S2+ΔS2, в общем случае  в линейных единицах (в метрах)
в линейных единицах (в метрах)  где: Sизм* - расстояние от используемых средств измерения до поезда (до первой оси поезда) по данным используемых средств измерения, полученное контроллером в момент прохода датчика колеса (ДК), расположенного на границе участка пути целевой колесной парой (ЦКП); ΔS* - суммарная ошибка измерения этого расстояния. За суммарную ошибку измерения этого расстояния средствами измерения в данном случае принимают ранее установленную (определенную контроллером) суммарную ошибку измерения ΔS* для этих же средств измерения при измерении расстояния до первой колесной пары поезда в тот момент, когда первая колесная пара поезда проходила датчик колеса, установленный на границе участка пути, то есть находилась непосредственно над ним. При использовании предиктора ΔS2=0.
где: Sизм* - расстояние от используемых средств измерения до поезда (до первой оси поезда) по данным используемых средств измерения, полученное контроллером в момент прохода датчика колеса (ДК), расположенного на границе участка пути целевой колесной парой (ЦКП); ΔS* - суммарная ошибка измерения этого расстояния. За суммарную ошибку измерения этого расстояния средствами измерения в данном случае принимают ранее установленную (определенную контроллером) суммарную ошибку измерения ΔS* для этих же средств измерения при измерении расстояния до первой колесной пары поезда в тот момент, когда первая колесная пара поезда проходила датчик колеса, установленный на границе участка пути, то есть находилась непосредственно над ним. При использовании предиктора ΔS2=0.
Рассмотрим работу предлагаемого способа и системы прицельной остановки поезда, когда в информационной модели поезда  известно в линейных единицах (в метрах и в сантиметрах) - случай 1, варианты а) и б).
известно в линейных единицах (в метрах и в сантиметрах) - случай 1, варианты а) и б).
• вариант а) - на границе участка только изостыки соответствующей рельсовой цепи;
• вариант б) - на границе участка имеются реверсивные датчики колеса.
Работа предлагаемого способа и системы прицельной остановки поезда в случае использования идеальной информационной модели поезда
Вариант 1а)
Если границы участка пути, где останавливают поезд, ограничены только изостыками рельсовой цепи, при проходе первой колесной пары поезда первого изостыка, ограничивающего участок пути, где должен быть остановлен поезд, (по моменту поступления из электрической централизации соответствующего сигнала) контроллер выводит в устройства передачи данных на локомотив информацию о расстоянии, оставшемся до остановки поезда, равном  (фиг. 3). Как и в предыдущем случае, при вступлении первой колесной пары (КП) поезда на участок, где он должен быть остановлен, по данным от средств измерения в контроллере 6 (фиг. 1) определяют расстояние до поезда Sизм.гр. (фиг. 3) и суммарную ошибку ΔS* измерения этими средствами расстояния до первой колесной пары поезда:
(фиг. 3). Как и в предыдущем случае, при вступлении первой колесной пары (КП) поезда на участок, где он должен быть остановлен, по данным от средств измерения в контроллере 6 (фиг. 1) определяют расстояние до поезда Sизм.гр. (фиг. 3) и суммарную ошибку ΔS* измерения этими средствами расстояния до первой колесной пары поезда:

где:
S1 - расстояние от пересеченной границы до точки прицельной остановки 10 поезда. (фиг. 3) на участке пути;
S2 - расстояние от точки прицельной остановки 10 поезда на участке пути до средств измерения расстояния. В случае измерения расстояния до поезда предиктором ΔS2=0.
Далее контроллер 6 (фиг. 1) по данным, поступающим в реальном масштабе времени от средств измерения о расстоянии от места установки средств измерения до первой колесной пары поезда, в соответствии с формулой (2) так же в реальном масштабе времени проводит расчет расстояния, оставшегося до остановки поезда, и с заранее заданной периодичностью (частотой) посылает эти данные в средства передачи данных на локомотив.
В дальнейшем, по мере приближения локомотива к точке своей остановки, контроллер 6 аналогичным образом проводит, по меньшей мере, еще два раза коррекцию суммарной ошибки измерения используемых средств измерений. Первый раз - когда первая колесная пара поезда проходит над, по меньшей мере, одним установленным дополнительным датчиком колеса (ДДК), поскольку точное расстояние от дополнительного датчика колеса (ДДК) до точки позиционирования поезда на участке пути известно, второй раз - когда над дополнительным датчиком колеса (ДДК) проходит целевая колесная пара (ЦКП). Измеряемое расстояние Sизм от дополнительного датчика колеса (ДДК) до точки позиционирования поезда на участке пути точно известно и равно в общем случае  . Следовательно, в этот момент времени можно определить (точно измерить) суммарную ошибку измерения средств измерений. И, таким образом, обеспечить остановку поезда с высокой точностью.
. Следовательно, в этот момент времени можно определить (точно измерить) суммарную ошибку измерения средств измерений. И, таким образом, обеспечить остановку поезда с высокой точностью.
Работа предлагаемого способа и системы прицельной остановки поезда в случае использования идеальной информационной модели поезда
Вариант 1б)
Данный случай от выше рассмотренного отличается только тем, что при проходе целевой колесной пары (ЦКП) (фиг. 3) реверсивного датчика колеса, установленного на границе участка, где должен быть остановлен поезд, по сигналу от этого датчика колеса можно провести дополнительную коррекцию суммарной ошибки измерения применяемых средств измерений. В данном случае точное расстояние от первой колесной пары поезда до средств измерений известно и равно  . Измерив в этот момент расстояние от средств измерений до поезда, можно определить ошибку измерения этого расстояния используемыми средствами измерения и немного раньше, чем в случае 1а) начать учитывать ее при расчете расстояния, оставшегося до остановки поезда. В случае измерения расстояния до поезда предиктором ΔS2=0.
. Измерив в этот момент расстояние от средств измерений до поезда, можно определить ошибку измерения этого расстояния используемыми средствами измерения и немного раньше, чем в случае 1а) начать учитывать ее при расчете расстояния, оставшегося до остановки поезда. В случае измерения расстояния до поезда предиктором ΔS2=0.
Хотя изобретение подробно пояснено с помощью ряда примеров реализации, специалистами в данной области техники могут быть выведены другие варианты его осуществления без выхода за объем защиты заявленного изобретения. Например, для измерения расстояния до приближающегося поезда вдоль железнодорожного пути может быть установлено несколько радиотехнических датчиков с ограниченной дальностью измерения. Также, вместо дополнительно устанавливаемых датчиков колеса в некоторых вариантах применения могут использоваться уже установленные датчики колеса для обозначения границ станционного пути. Естественно при этом известными инженерными решениями незначительно должен быть изменен алгоритм вычисления расстояния оставшегося до остановки поезда. При этом суть и объем защиты предлагаемого изобретения не меняются.
Таким образом, предлагаемые способ прицельной остановки поезда на участке пути и система для осуществления этого способа позволяют осуществить точную остановку состава поезда с позиционированием любой колесной пары одного из вагонов, принятой за целевую колесную пару поезда, относительно некоторой любой заданной точки на маршруте следования. Следовательно, они обеспечивают расширение функциональных возможностей применения предложенного способа и системы и позволяют повысить точность остановки поезда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления устройствами закрепления железнодорожного подвижного состава | 2017 |
|
RU2682519C1 |
| Автоматизированная система закрепления железнодорожного подвижного состава | 2019 |
|
RU2706751C1 |
| Система для позиционирования железнодорожного подвижного состава при закреплении механизированными устройствами | 2022 |
|
RU2788208C1 |
| Система автоматического закрепления подвижного состава | 2024 |
|
RU2836918C1 |
| Способ формирования информационной модели поезда | 2019 |
|
RU2718750C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА, МАНЕВРОВОГО СОСТАВА ИЛИ ОДИНОЧНОГО ЛОКОМОТИВА ПО СТАНЦИИ И НА ПОДХОДАХ К НЕЙ | 2007 |
|
RU2352487C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ МАНЕВРОВОГО ЛОКОМОТИВА | 2005 |
|
RU2284275C1 |
Изобретение относится к средствам прицельной остановки поезда. Техническое решение включает контроллер и связанные с ним средства для идентификации типов подвижных единиц, пункт фиксации момента входа поезда в зону прицельной остановки, пункт регистрации колеса в зоне закрепления, устройства передачи данных на локомотив и средства дистанционного контроля положения закрепляемой колесной пары в зоне устройств закрепления. Средства для идентификации типов подвижных единиц поезда включают рельсовую цепь наложения и, по меньшей мере, два датчика регистрации прохода колеса, расположенные друг от друга на расстоянии, меньшем минимально возможного расстояния между двумя колесными парами всех существующих подвижных железнодорожных единиц. Пункт фиксации момента входа поезда в зону прицельной остановки включает, по меньшей мере, один датчик регистрации прохода колеса, либо изоляционный стык рельсовой цепи, ограничивающие, соответственно, границу станционного пути, на который принимается закрепляемый подвижной состав. Пункт регистрации колеса в зоне закрепления включает датчики регистрации колеса. Устройства передачи данных на локомотив содержат радиоканал, связанный с контроллером и бортовым устройством отображения в кабине локомотива для передачи машинисту информации о расстоянии закрепляемой оси поезда до устройств закрепления. Контроллер предназначен для сбора всей необходимой информации, ее обработки и выдачи соответствующих команд для обеспечения прицельной остановки поезда. Достигается повышение точности остановки подвижного состава относительно любой заданной точки на маршруте следования поезда. 2 н. и 8 з.п. ф-лы, 3 ил.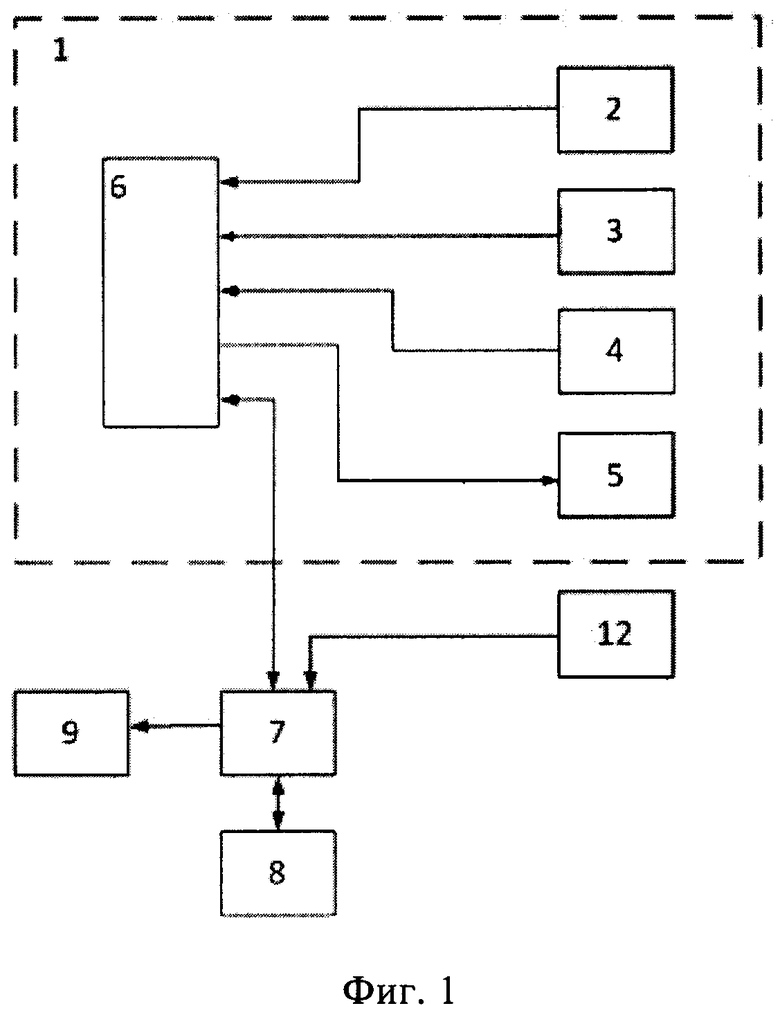
1. Способ прицельной остановки поезда на участке пути, ограниченном изоляционными стыками рельсовой цепи и/или реверсивными датчиками колеса, включающий использование информационной модели поезда, устройств, расположенных в некоторых точках вдоль направления следования поезда и предназначенных для измерения в режиме реального времени расстояния от мест установки этих устройств до начала поезда, где за начало поезда принимается первая колесная пара первого локомотива поезда, выбор целевой колесной пары поезда, выбор некоторой точки прицельной остановки поезда относительно маршрута следования, применение средств передачи данных на локомотив и, по меньшей мере, одного контроллера, вычисляющего в режиме реального времени расстояние, оставшееся до остановки поезда, и подключенного к устройствам электрической централизации, к средствам получения информационной модели поезда, к устройствам измерения расстояния до поезда и к средствам передачи данных на локомотив, отличающийся тем, что на пути следования поезда на некотором расстоянии  до точки, относительно которой должен быть остановлен поезд, на рельсах дополнительно устанавливают, по меньшей мере, один дополнительный реверсивный датчик колеса, подключенный к контроллеру, предварительно определяют по информационной модели поезда расстояние
до точки, относительно которой должен быть остановлен поезд, на рельсах дополнительно устанавливают, по меньшей мере, один дополнительный реверсивный датчик колеса, подключенный к контроллеру, предварительно определяют по информационной модели поезда расстояние  от целевой колесной пары до первой колесной пары поезда и расстояние
от целевой колесной пары до первой колесной пары поезда и расстояние  или
или  которое должен пройти локомотив от соответствующей границы участка пути до остановки, где S1 и S2 - расстояния от соответствующих границ участка пути, на которые входит поезд, до точки прицельной остановки поезда на маршруте следования, относительно которой производят остановку поезда, а в моменты прохода первой колесной парой поезда одной из границ участка пути и дополнительного реверсивного датчика колеса устройствами измерения определяют расстояние Sизм от мест установки этих устройств до начала поезда и контроллером вычисляют суммарную ошибку измерения этих расстояний
которое должен пройти локомотив от соответствующей границы участка пути до остановки, где S1 и S2 - расстояния от соответствующих границ участка пути, на которые входит поезд, до точки прицельной остановки поезда на маршруте следования, относительно которой производят остановку поезда, а в моменты прохода первой колесной парой поезда одной из границ участка пути и дополнительного реверсивного датчика колеса устройствами измерения определяют расстояние Sизм от мест установки этих устройств до начала поезда и контроллером вычисляют суммарную ошибку измерения этих расстояний  где
где  для моментов прохода первой колесной парой любой из границ участка пути и
для моментов прохода первой колесной парой любой из границ участка пути и  или
или  для моментов прохода первой колесной парой над дополнительным реверсивным датчиком колеса, соответственно, в зависимости от стороны с которой поезд входит на участок пути для остановки, далее расстояние, измеряемое средствами измерения в режиме реального времени с учетом этих ошибок
для моментов прохода первой колесной парой над дополнительным реверсивным датчиком колеса, соответственно, в зависимости от стороны с которой поезд входит на участок пути для остановки, далее расстояние, измеряемое средствами измерения в режиме реального времени с учетом этих ошибок  используют для расчета расстояния, которое должен пройти поезд до его остановки
используют для расчета расстояния, которое должен пройти поезд до его остановки  или
или  соответственно, в зависимости от стороны с которой поезд входит на участок пути для остановки, и в режиме реального времени с заданной периодичностью передают величину рассчитываемого расстояния на локомотив, затем в момент прохода целевой колесной пары над дополнительным реверсивным датчиком колеса, по меньшей мере, еще один раз определяют ошибку измерения
соответственно, в зависимости от стороны с которой поезд входит на участок пути для остановки, и в режиме реального времени с заданной периодичностью передают величину рассчитываемого расстояния на локомотив, затем в момент прохода целевой колесной пары над дополнительным реверсивным датчиком колеса, по меньшей мере, еще один раз определяют ошибку измерения  или
или  соответственно, в зависимости от стороны с которой поезд входит на участок пути для остановки, после этого расчет расстояния, которое должен пройти поезд до его остановки, проводят в режиме реального времени уже с учетом этой ошибки измерения и передают величину этого расстояния на локомотив с заданной периодичностью, руководствуясь полученными данными, осуществляют торможение и остановку поезда в ручном или в автоматическом режиме.
соответственно, в зависимости от стороны с которой поезд входит на участок пути для остановки, после этого расчет расстояния, которое должен пройти поезд до его остановки, проводят в режиме реального времени уже с учетом этой ошибки измерения и передают величину этого расстояния на локомотив с заданной периодичностью, руководствуясь полученными данными, осуществляют торможение и остановку поезда в ручном или в автоматическом режиме.
2. Система для прицельной остановки поезда на участке пути, ограниченном изоляционными стыками рельсовой цепи и/или реверсивными датчиками колеса, содержащая средства для получения информационной модели поезда, устройства, расположенные в некоторых точках вдоль направления следования поезда и предназначенные для измерения в режиме реального времени расстояния от мест установки этих устройств до начала поезда, средства передачи данных на локомотив, и, по меньшей мере, один контроллер, вычисляющий в режиме реального времени расстояние, оставшееся до остановки поезда, и подключенный к устройствам электрической централизации, к средствам получения информационной модели поезда, к устройствам измерения расстояния до поезда и к средствам передачи данных на локомотив, где одна из колесных пар одной из подвижных единиц поезда принимается за целевую колесную пару поезда, а также некоторая точка прицельной остановки поезда относительно маршрута следования поезда, отличающаяся тем, что содержит, по меньшей мере, один дополнительный реверсивный датчик колеса, подключенный к контроллеру и установленный на рельсах на пути следования поезда на некотором расстоянии  до точки, относительно которой должен быть остановлен поезд.
до точки, относительно которой должен быть остановлен поезд.
3. Система по п. 2, отличающаяся тем, что средства для получения информационной модели поезда содержат рельсовую цепь наложения и, по меньшей мере, два датчика регистрации прохода колеса, подключенные к контроллеру, содержащему базу данных существующих типов железнодорожных подвижных единиц с указанием количества колесных пар каждого типа подвижной единицы, межосевых расстояний колесных пар, расстояний от осей крайних колесных пар до осей автосцепок и расстояний между осями автосцепок, при этом датчики регистрации прохода колеса расположены друг от друга на расстоянии, меньшем минимально возможного расстояния между двумя колесными парами существующих подвижных железнодорожных единиц.
4. Система по п. 2, отличающаяся тем, что средства для получения информационной модели состава поезда содержат оборудование для формирования, передачи и приема телеграммы-натурного листа, при этом контроллер содержит базу данных всех типов железнодорожных подвижных единиц, обращаемых на данном участке, с указанием количества колесных пар каждого типа подвижной единицы, межосевых расстояний колесных пар, расстояний от осей крайних колесных пар до осей автосцепок и расстояний между осями автосцепок каждой подвижной единицы.
5. Система по п. 2, отличающаяся тем, что средства для получения информационной модели состава поезда содержат последовательно размещенные на пути следования поезда реверсивные точечные путевые датчики колеса, подключенные к контроллеру и образующие несколько контролируемых участков пути заданной длины.
6. Система по п. 2, отличающаяся тем, что устройства, предназначенные для измерения в режиме реального времени расстояния от мест установки этих устройств до начала поезда, содержат радиолокационные устройства.
7. Система по п. 2, отличающаяся тем, что устройства, предназначенные для измерения в режиме реального времени расстояния от мест установки этих устройств до начала поезда, содержат предикторы, подключенные к рельсовым линиям.
8. Система по п. 2, отличающаяся тем, что средства передачи данных на локомотив содержат путевые устройства отображения, связанные с контроллером и установленные вдоль участка пути, на котором должен быть остановлен поезд.
9. Система по п. 2, отличающаяся тем, что средства передачи данных на локомотив содержат радиоканал для связи контроллера с локомотивными устройствами обеспечения безопасности движения и/или с бортовым устройством отображения в кабине локомотива для передачи информации машинисту о расстоянии, оставшемся до остановки состава поезда.
10. Система по п. 2, отличающаяся тем, что средства передачи данных на локомотив содержат путевые устройства системы автоматического управления тормозами.
| Система управления устройствами закрепления железнодорожного подвижного состава | 2017 |
|
RU2682519C1 |
| Автоматизированная система закрепления железнодорожного подвижного состава | 2019 |
|
RU2706751C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВАМИ ЗАКРЕПЛЕНИЯ ПОЕЗДА | 2015 |
|
RU2598919C1 |
| WO 2012171096 A1, 20.12.2012. | |||

