Изобретение относится к гидропневмоавтоматике и может быть использовано в приводах промышленных роботов и манипуляторов.
Цель изобретения - повьшение точности и расширение функциональных возможностей.
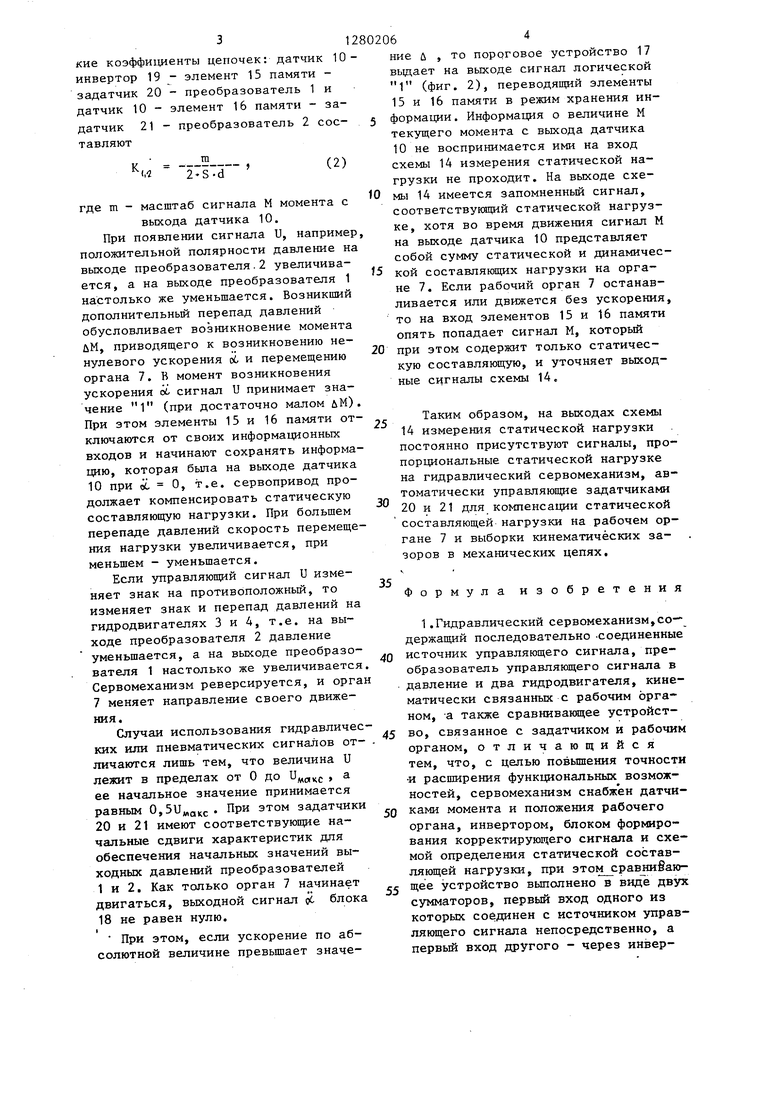
На фиг. 1 изображена схема гидравлического сервомеханизма; на фиг. 2 - статическая характеристика порогового устройства.
Гидравлический сервомеханизм содержит последовательно соединенные источник управляющего сигнала (не показан), преобразователи 1 и 2 управляющего сигнала в давление и гидродвигатели 3 и 4, кинематически связанные штоками 5 и 6 с рабочим органом 7, а также сравнивающее устройство в виде сумматоров 8 и 9, датчик 10 момента, датчик 11 положения рабочего органа 7, инвертор 12, блок 13 формирования корректирующего сигнала и схему 14 определения статической составляющей нагрузки, выполненную в виде элементов 15 и 16 памяти, порогового устройства 17, блока 18 двойного дифференцирования и дополнительного инвертора 19. При этом датчик 10 подключен к информационному входу элемента 15 непосредственно, а к информационному входу элемента 16 - через инвертор 19.Датчик 11 через последовательно соединенные блок 18 и устройство 17 соединен с управлянлцими входами элементов 15 и 16, а выходы последних подключены к входам блока 13, выполненного в виде задатчиков 20 и 21.
Первый вход сумматора 8 соединен с источником управляющего сигнала непосредственно, а первый вход сумматора 9 - через инвертор 12. Вторые входы сумматоров 8 и 9 соединены с выходами задатчиков 20 и 21, а выходы сумматоров 8 и 9 - с преобразователями 1 и 2. Задатчики 20 и 21 имеют дополнительные входы ручного управления .
Гидравлический сервомеханизм работает следукщим образом.
Перед началом работы рабочий орган 7 устанавливают в одно из крайних положений до упора так, чтобы статическая нагрузка компенсировалась реакцией упора. На выходах задатчиков 20 и 21 вручную устанавливают начальные значения выходных
5
0
5
0
5
0
5
сигналов, чтобы на выходах преобразователей 1 и 2 соответственно появились начальные значения давлений в пределах 40-50% , . Это обеспечивает выборку лифтов в кинематических цепях рабочего органа 7. Управляющий сигнал и равен нулю.
При значении управляющего сигнала и О рабочий орган 7 остается неподвижным, поэтому об О и на выходе блока 18 присутствует нулевой сигнал, Датчик 10 момента вырабатьгоает сигнал М, равный статической нагрузке на орган 7, поскольку последний неподвижен. Сигнал М подается на вход элемента 16 памяти и через инвертор
19- на вход элемента 15 памяти. На выходе порогового устройства
17 сигнал if равен нулю, поскольку на его входе - нулевой сигнал об блока 18 (фиг. 2). Сигнал qi логического О поступает на управляющие входы элементов 15 и 16 памяти пере- водит их в режим выборки, в котором они записывают противофазные сигналы, пропорциональные статическому моменту М на органе 7. Сигналы с выходов элементов 15 и 16 памяти подаются на управляющие входы задатчиков
20и 21, которые формируют на входах преобразователей 1 и 2 пропорциональный величине М перепад давлений на гидродвигателях 3 и 4.
Поскольку приращения сигналов на выходах элементов 15 и 16 памяти одинаковы и имеют за счет инвертора 19 разные знаки, что приводит к возникновению соответствующих перепадов давлений на выходах преобразователей 1 и 2, то суммарный перепад давлений на гидродвигателях 3 и 4 компенсирует статический момент М, т.е. статическую нагрузку.
Для полной компенсации указанной нагрузки необходимо, чтобы выполнялось соотношение
2 . uP-S-d М
(1)
где лР - изменение давления на выходе каждого из преобразователей 1 и 2;
S - рабочая площадь гидроэлектродвигателей 3 и 4; d - приведенное плечо сил рабочего органа 7.
Выполнение соотношения (1) обеспечивается, если передаточные статические коэффициенты цепочек: датчик 10- инвертор 19 - элемент 15 памяти - задатчик 20 - преобразователь 1 и датчик 10 - элемент 16 памяти - задатчик 21 - преобразователь 2 составляют
га
К
(,2
2-S.d
(2)
где m - масштаб сигнала М момента с выхода датчика 10.
При появлении сигнала U, например положительной полярности давление на вькоде преобразователя.2 увеличивается, а на выходе преобразователя 1 настолько же уменьшается. Возникший дополнительный перепад давлений обусловливает возникновение момента йМ, приводящего к возникновению ненулевого ускорения oi, и перемещению органа 7. В момент возникновения ускорения ci сигнал U принимает значение 1 (при достаточно малом дМ) При этом элементы 15 и 16 памяти отключаются от своих информационных входов и начинают сохранять информацию, которая была на выходе датчика 10 при оС О, т.е. сервопривод продолжает компенсировать статическую составляющую нагрузки. При большем перепаде давлений скорость перемещения нагрузки увеличивается, при меньшем - уменьшается.
Если управляющий сигнал U изменяет знак на противоположный, то изменяет знак и перепад давлений на гидродвигателях 3 и 4, т.е. на выходе преобразователя 2 давление уменьшается, а на выходе преобразователя 1 настолько же увеличивается Сервомеханизм реверсируется, и орга 7 меняет направление своего движения.
Случаи использования гидравлических или пневматических сигналов от- личаются лишь тем, что величина U лежит в пределах от О до , а ее начальное значение принимается равным 0,5и„а. . При этом задатчики 20 и 21 имеют соответствующие начальные сдвиги характеристик для обеспечения начальных значений выходных давлений преобразователей 1 и 2, Как только орган 7 начинает двигаться, выходной сигнал блока 18 не равен нулю.
I
При этом, если ускорение по абсолютной величине превьшзает значе
5
0
5
0
5
0
5
0
5
ние 6 , то пороговое устройство вьщает на выходе сигнал логической 1 (фиг. 2), переводящий элементы 15 и 16 памяти в режим хранения информации . Информация о величине М текущего момента с выхода датчика 10 не воспринимается ими на вход схемы 14 измерения статической нагрузки не проходит. На выходе схемы 14 имеется запомненный сигнал, соответствующий статической нагрузке, хотя во время движения сигнал М на выходе датчика 10 представляет собой сумму статической и динамической составляющих нагрузки на органе 7. Если рабочий орган 7 останавливается или движется без ускорения, то на вход элементов 15 и 16 памяти опять попадает сигнал М, который при этом содержит только статическую составляющую, и уточняет выходные сигналы схемы 14.
Таким образом, на выходах схемы 14 измерения статической нагрузки постоянно присутствуют сигналы, пропорциональные статической нагрузке на гидравлический сервомеханизм, автоматически управляющие задатчиками 20 и 21 для компенсации статической составляющей нагрузки на рабочем органе 7 и выборки кинематических зазоров в механических цепях.
Формула изобретения
1 .Гидравлический сервомеханизм,содержащий последовательно -соединенные источник управляющего сигнала, преобразователь управляющего сигнала в давление и два гидродвигателя, кинематически связанных с рабочим органом, а также сравнивающее устройство, связанное с задатчиком и рабочим органом, отличающийся тем, что, с целью повьшения точности и расширения функциональных возможностей, сервомеханизм снабжен датчиками момента и положения рабочего органа, инвертором, блоком форьмро- вания корректирующего сигнала и схемой определения статической составляющей нагрузки, при этом срав ш§аю- щее устройство выполнено в виде двух сумматоров, первый вход одного из которых соединен с источником управляющего сигнала непосредственно, а первый вход другого - через инвертор, вторые входы сумматоров соединены с выходами блока формирования корректирующего сигнала, соединенного через схему определения статической составляющей нагрузки с датчиками момента и положения рабочего органа.
2. Сервомеханизм по п.1 отличающийся тем, что схема определения статической составляющей нагрузки выполнена в виде двух элементов йамяти, порогового устройства, блока двойного дифференцирования
и дополнительного инвертора, при этом датчик момента подключен к информационному входу одного элемента памяти непосредственно, а к информационному входу другого - через дополнительный инвертор, датчик положения через последовательно соединенные блок двойного дифференцирования и пороговое устройство соединен с управляющими входами элементов памяти, а выходы последних подключены к входам блока формирования корректи- рукицёго сигнала.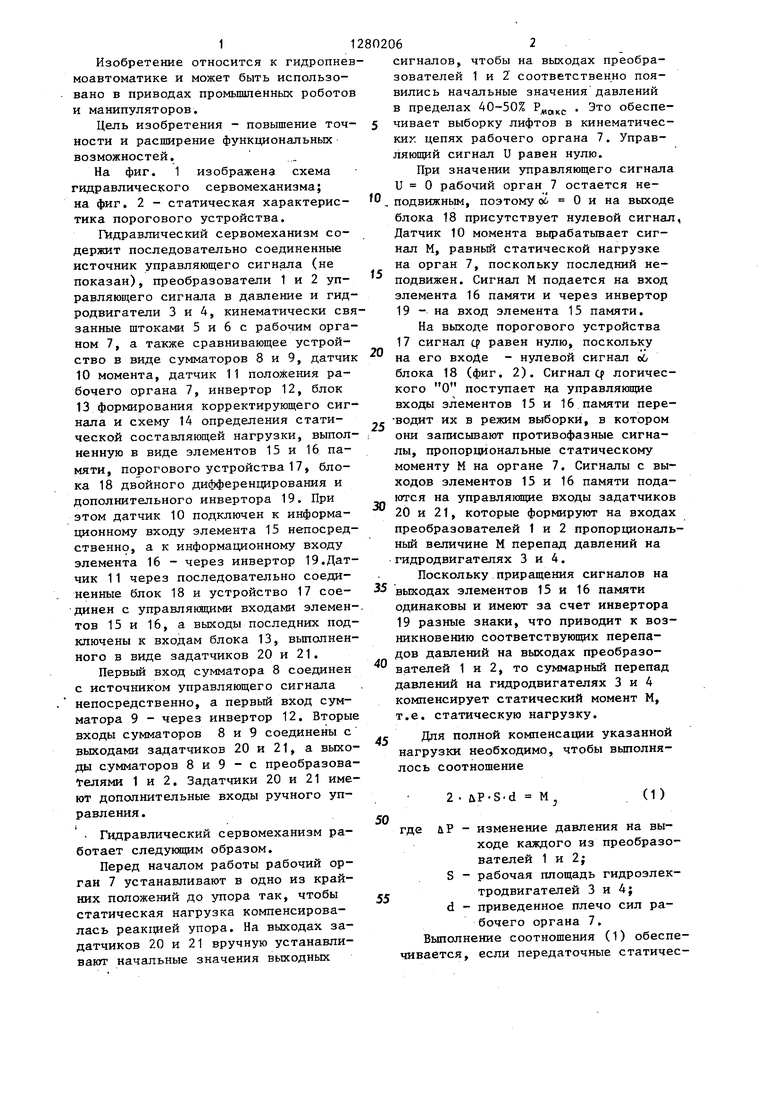
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытаний двух объемных регулируемых гидропередач | 1986 |
|
SU1435859A1 |
| Система дистанционного и автоматического управления двигателем внутреннего сгорания | 1982 |
|
SU1059237A1 |
| Электрогидравлическая следящая система | 1985 |
|
SU1317189A1 |
| Система управления агрегатом правки цилиндрических изделий | 1981 |
|
SU1074621A1 |
| Автоматическая дистанционная система управления для двигателя внутреннего сгорания | 1980 |
|
SU926341A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Устройство для обучения работе на металлорежущих станках | 1982 |
|
SU1051558A1 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Устройство для автоматической стабилизации скорости шлифования | 1982 |
|
SU1046077A1 |

Изобретение относится к области гидропневмоавтоматики и может быть использовано в приводах промьшшенных роботов и манипуляторов. Целью изобретения является повышение точности и расширение функциональных возможностей сервопривода. Сервомеханизм включает в себя источник и преобразователи 1,2 управлякндего сигнала, гидроприводы 3, 4 и сравнивающее устр-во. Он оборудован также датчиками 10 и 11 момента и положения рабочего органа 7, инвертором 12, блоком 13 формирования корректирующего сигнала и блоком 17 определения статической составляющей нагрузки. Наличие связей схемы позволяет независимо плавно регулировать давление в полостях исполнительных гидроприводов 3 и 4i Это приводит к возмоунос- ти выбора боковых зазоров кинематических передач 5, 6. При помощи блока 17 возможно измерение нагрузки на исполнительном органе 7. Е компенсация осуществляется при помощи блока задатчиков 13. 1 з.п. ф-лы,2 ил. i СЛ С и 21 13 фуе. /
Составитель С.Рождественский
Редактор С.Лисина Техред Л.ОлеЙиик
Заказ 7039/33 Тираж 610Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор О.Луговая
| Авторское свидетельство СССР 916300, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
