Область техники.
Изобретение относится к сельскому хозяйству, а именно к устройствам контроля глубины обработки почвы, установленных на сельскохозяйственных орудиях, таких как плуг, культиватор, борона, мульчировщик, сеялка, и т.п.
Уровень техники
В сельском хозяйстве поддержание оптимальных условий почвы для высокой урожайности имеет большое значение. Задача производителя - поместить семена в почву на одинаковую глубину для достижения равномерного появления всходов. Однако, из-за неоднородного рельефа поля или качества почвы (сухой, твердой, каменистой почвы, мягкой, влажной или песчаной почвы), некорректной эксплуатации почвообрабатывающих сельскохозяйственных орудий и прочих причин глубина обработки почвы может оказаться неодинаковой на разных участках поля.
Таким образом возникает проблема постоянного контроля глубины обработки почвы работающим почвообрабатывающим сельскохозяйственным орудием.
Из уровня техники известны устройства определения глубины обработки почвы, такие как, например:
устройство для определения фактической глубины хода рабочих органов почвообрабатывающих машин и орудий по патенту РФ на полезную модель №102108 (заявка 2010139193, МПК G01B 13/00. Опубликовано 10.02.2011; не действует) [1], содержащее средства измерения расстояния от поверхности почвы до необработанного слоя. Измерительное устройство жестко закреплено на раме с рабочими органами, установленными на жестких стойках, и имеет поворотный механизм с датчиком угла поворота, соединенный посредством кронштейна с колесом, оснащенным датчиком для измерения пути. Глубина хода рабочих органов определяется величиной угла поворота кронштейна 3 при заглублении в почву рабочих органов и движении колеса по поверхности почвы. В известном устройстве использованы механические датчики определения глубины. Механические датчики имеют низкую надежность и невысокую точность определения глубины обработки почвы. В известном устройстве отсутствует возможность определения положения в пространстве сельскохозяйственного орудия. Не предусмотрены электронные устройства на базе микроконтроллера и не предусмотрена передача результатов измерений на удаленный сервер для их хранения и обработки, что не позволяет сохранять полные информационные сведения о фактической глубине хода рабочих органов почвообрабатывающих орудий на пройденном участке пути.
Известно устройство для определения глубины обработки почвы по патенту на полезную модель №110476 (Заявка: 2011111469; МПК G01B 13/00. Опубликовано 20.11.2011; не действует) [2]. Устройство соединяется с рамой почвообрабатывающей машины или орудия. Устройство содержит лазерный измеритель расстояния. В исходном положении почвообрабатывающего орудия измеряется расстояние по вертикали от источника излучения до основания рабочего органа. Измеренное расстояние уточняется по показаниям лазерного измерителя и статистических средних значений измеренных расстояний от источника излучения до поверхности обработанной почвы. К недостаткам известного устройства можно отнести следующие: сложность реализации и сложный математический аппарат обработки получаемых данных о глубине обработки почвы; зависимость результатов измерений от освещенности солнцем обрабатываемого участка и погодных условий. Отсутствует возможность определения положения в пространстве сельскохозяйственного орудия.
Известно устройство измерения глубины обработки почвы при испытании почвообрабатывающих машин и орудий по патенту на полезную модель №191181 (Заявка 2019108378, МПК G01B 3/00, A01B 63/00. Опубликовано: 29.07.2019) [3], содержащее электронный блок микроконтроллера, обеспечивающий непрерывный процесс фиксации регистрации данных, получаемых с подключенных датчиков, позволяющий записывать и сохранять полные информационные сведения о фактической глубине хода рабочих органов почвообрабатывающих машин/орудий на пройденном участке пути, в соответствии с техническими и технологическими требованиями к перспективной сельскохозяйственной технике.
Электронное измерительное устройство состоит из датчика пройденного пути - 1, датчика угла поворота кронштейна - 2, микроконтроллера STM32F405 - 3, модуля индикации - 4, клавиатуры - 5, энергонезависимой памяти EN25F80 емкость 1 Мбит - 6, Li-Ion аккумуляторной батареи 3,7 В - 7, модуля контроля заряда батареи - 8 и модуля питания от бортовой сети 12÷24 В - 9. Данные, получаемые с подключенных датчиков, предварительно обрабатываются микроконтроллером STM32F405, записываются в энергонезависимую память и отображаются на графическом дисплее устройства для контроля за фактической глубиной хода рабочих органов.
В устройстве использованы механические датчики - датчик пройденного пути и датчик угла поворота кронштейна. Недостатки механических датчиков были описаны выше. В устройстве не предусмотрена передача данных на удаленный сервер для хранения их и обработки.
Известна система с применением ультразвуковых датчиков для контроля глубины обработки почвы, например, ультразвукового датчика приближения Эскорт ДГВ-200 (https://www.fmeter.ru/infocenter/helpful/dgv-200-glubina-poseva/. Опубликовано 13.09.2019);
(https://www.fmeter.ru/download/_ftp/ultrazvukovoj-datchik-priblizhenija/eskort-DVG-200/Руководство_пользователя_DGV-200.pdf. Стр. 8-9. Опубликовано 13.09.2019) [4].
Указанный датчик предназначен для использования в системе мониторинга транспорта (СМТ) удаленно вести онлайн контроль качества работ по обработке почвы и глубине вспашки, культивирования, глубине посева. Также своевременно выявлять участки, обработанные с нарушениями технологии и предпринимать необходимые действия по их устранению, что в дальнейшем поможет избежать излишнего расхода семян, удобрений, горюче-смазочных материалов.
Датчик приближения Эскорт ДГВ-200 с помощью ультразвукового сигнала позволяет определить точное расстояние до объекта и, тем самым, контролировать глубину для равномерного посева семян (чем ниже платформа посевного комплекса, тем больше глубина посева), распределения удобрений.
На правую и левую секцию прицепного агрегата крепятся два ультразвуковых датчика расстояния. Датчики настраиваются на замер нужных пределов заглубления агрегата в зависимости от требований технологий обработки. Сигнальный кабель от датчиков, подключается к бортовому компьютеру, который установлен на буксирующем ТС.
Датчик приближения ультразвуковой ЭСКОРТ ДГВ-200 (далее датчик) измеряет расстояние и передает измеренное значение по интерфейсу RS-485 и в виде частотного сигнала. Измеритель представляет собой законченное неразборное изделие, выполненное в цилиндрическом стальном корпусе. Внутри корпуса установлена плата управления, залитая компаундом. В корпусе имеется герметичный вход с постоянно присоединенным кабелем, с противоположной стороны имеется рупор с установленным внутри ультразвуковым преобразователем.
Однако ультразвуковой датчик в вышеупомянутой системе не обладает способностью отсеивать некорректные отсчеты глубины, возникающие, например, при попадании в пространство между датчиком и почвой мелких объектов, таких как растения, что приводит к значительным искажениям результатов его работы. Применение в полевых условиях сложного многопроводного информационного кабеля для связи такого датчика с компьютером, расположенным в кабине буксирующего транспортного средства, снижает надежность системы и ее эксплуатационные характеристики. Так же эта система не содержит датчика ориентации, позволяющего выявлять факты нарушения технологии обработки почвы и факты несанкционированного изменения параметров сельхозорудия.
Отсутствие в известных устройствах возможности передачи данных на удаленный компьютер не позволяет сельскохозяйственному предприятию производить накопление информации, содержащей сведения о фактической глубине обработки почвы на его полях. Такая электронная запись и хранение истории полевых работ может помочь как при последующем принятии решений, так и при составлении специальной отчетности о производственном цикле, которая все чаще требуется законодательством развитых стран.
По совокупности признаков электронное измерительное устройство по патенту на полезную модель №191181[3] принято в качестве наиболее близкого аналога.
Техническим результатом заявляемого изобретения является создание электронного устройства для мониторинга почвообрабатывающего орудия, заключающегося в определении глубины обработки почвы этим орудием с целью получения с помощью ультразвукового датчика, с высокой точностью и высокой частотой, непрерывно во времени, последовательности отсчетов, содержащих информацию о глубине обработки почвы, и с привязкой этой последовательности к реальному времени и к положению указанного электронного устройства в пространстве, с помощью часов реального времени и датчика ориентации, с возможностью записи указанной последовательности в энергонезависимую память и с возможностью ее передачи на удаленный компьютер для обработки и хранения.
Раскрытие изобретения.
Технический результат достигается тем, что устройство мониторинга работы почвообрабатывающего орудия по варианту 1, жестко закрепляемое на его раме с рабочими органами и заключенное в корпус, содержащее микроконтроллер (МК), обеспечивающий непрерывный прием данных, поступающих от подключенных датчиков, имеющих высокую точность и частоту измерения, и энергонезависимую память с объемом, позволяющим записывать и сохранять указанные данные, согласно изобретения дополнительно содержит блок связи с удаленным компьютером, блок часов реального времени, датчик положения в пространстве, блок чтения RFID-метки, блок ПЗУ для хранения параметров шифрования данных и идентификаторов заявляемого устройства, блок питания, которые соединены электрическими связями с блоком МК и расположены на печатной плате, закрепленной внутри корпуса устройства, при этом устройство содержит датчик глубины обработки почвы, в качестве которого применен ультразвуковой дальномер, закрепленный на корпусе устройства и соединенный электрическими связями с микроконтроллером. причем блок чтения RFID-метки выполнен с возможностью получения сигнала от RFID-метки по радиоканалу двунаправленному.
При этом в состав блока питания входит контроллер питания и аккумуляторная батарея.
При этом первый вход/выход блока МК подключен ко входу/выходу блока постоянного запоминающего устройства (ПЗУ), второй вход/выход блока МК подключен ко входу/выходу блока памяти, третий вход/выход блока МК подключен к первому входу/выходу блока связи, четвертый вход/выход блока МК подключен ко входу/выходу блока часов РВ, пятый вход/выход блока МК подключен ко входу/выходу датчика ориентации, шестой вход/выход блока МК подключен ко входу/выходу блока чтения метки, выход блока МК подключен к управляющему входу блока питания, первый вход блока МК подключен к выходу состояния блока питания, второй вход блока МК подключен к выходу дальномера ультразвукового; второй вход/выход блока связи подключен к каналу связи с удаленным компьютером, при этом устройство содержит разъем питания, который с внутренней стороны подключен ко входу питания блока питания, а его внешняя сторона предназначена для подключения кабеля сети бортовой к устройству, причем к силовому выходу блока питания подключена шина питания, подключенная ко входам питания всех расположенных на плате блоков и к блоку дальномера ультразвукового.
Технический результат изобретения достигается также тем, что устройство мониторинга работы почвообрабатывающего орудия по варианту 2, жестко закрепляемое на его раме с рабочими органами и заключенное в корпус, содержащее микроконтроллер (МК), обеспечивающий непрерывный прием данных, поступающих от подключенных датчиков, имеющих высокую точность и частоту измерения, и энергонезависимую память с объемом, позволяющим записывать и сохранять указанные данные, согласно изобретения дополнительно содержит блок связи с удаленным компьютером, блок часов реального времени, датчик ориентации, блок чтения RFID-метки, которые соединены электрическими связями с блоком МК и расположены на печатной плате, закрепленной внутри корпуса устройства, при этом устройство содержит датчик глубины обработки почвы, в качестве которого применен ультразвуковой дальномер, закрепленный на корпусе устройства и соединенный электрическими связями с микроконтроллером, причем блок чтения RFID-метки выполнен с возможностью получения сигнала от RFID-метки по радиоканалу двунаправленному.
При этом в состав блока питания входит контроллер питания и аккумуляторная батарея.
При этом первый вход/выход блока МК подключен ко входу/выходу блока памяти, второй вход/выход блока МК подключен к первому входу/выходу блока связи, третий вход/выход блока МК подключен ко входу/выходу блока часов РВ, четвертый вход/выход блока МК подключен ко входу/выходу датчика ориентации, пятый вход/выход блока МК подключен ко входу/выходу блока чтения метки, выход блока МК подключен к управляющему входу блока питания, первый вход блока МК подключен к выходу состояния блока питания, второй вход блока МК подключен к выходу дальномера ультразвукового; второй вход/выход блока связи подключен к каналу связи с удаленным компьютером; при этом устройство содержит разъем питания с внутренней стороны подключен ко входу питания блока питания, а его внешняя сторона предназначена для подключения кабеля сети бортовой к устройству, причем к силовому выходу блока питания подключена шина питания, подключенная ко входам питания всех расположенных на плате блоков и к блоку 6 дальномера ультразвукового.
При этом любому из вариантов 1 или 2 RFID-метка установлена на платформе, жестко закрепленной на раме почвообрабатывающего орудия, причем корпус устройства соединен одной своей стенкой с платформой, при этом указанная стенка содержит нишу, а RFID-метка, закрепленная на платформе, закрыта указанной нишей.
Технический результат изобретения достигается также тем, что устройство мониторинга работы почвообрабатывающего орудия по варианту, жестко закрепляемое на его раме с рабочими органами и заключенное в корпус, содержащее микроконтроллер (МК), обеспечивающий непрерывный прием данных, поступающих от подключенных датчиков, имеющих высокую точность и частоту измерения, и энергонезависимую память с объемом, позволяющим записывать и сохранять указанные данные, согласно изобретения дополнительно содержит блок связи с удаленным компьютером, блок часов реального времени, датчик положения в пространстве, блок питания, которые соединены электрическими связями с блоком МК и расположены на печатной плате, закрепленной внутри корпуса устройства, при этом устройство содержит датчик глубины обработки почвы, в качестве которого применен ультразвуковой дальномер, закрепленный на корпусе устройства и соединенный электрическими связями с микроконтроллером.
При этом в состав блока питания входит контроллер питания и аккумуляторная батарея.
При этом первый вход/выход блока МК подключен ко входу/выходу блока памяти, второй вход/выход блока МК подключен к первому входу/выходу блока связи, третий вход/выход блока МК подключен ко входу/выходу блока часов РВ, четвертый вход/выход блока МК подключен ко входу/выходу датчика ориентации, выход блока МК подключен к управляющему входу блока питания, первый вход блока МК подключен к выходу состояния блока питания, второй вход блока МК подключен к выходу дальномера ультразвукового; второй вход/выход блока связи подключен к каналу связи с удаленным компьютером; при этом устройство содержит разъем питания с внутренней стороны подключен ко входу питания блока питания, а его внешняя сторона предназначена для подключения кабеля сети бортовой к устройству, причем к силовому выходу блока питания подключена шина питания, подключенная ко входам питания всех расположенных на плате блоков и к блоку дальномера ультразвукового.
При этом по любому из вариантов 1, 2 или 3датчик ориентации содержит трехосный акселерометр, трехосный гироскоп и трехосный магнитометр.
При этом по любому из вариантов 1, 2 или 3 корпус устройства выполнен герметичным и радиопрозрачным.
Сокращения:
ЗУ - запоминающее устройство;
ПЗУ - постоянное запоминающее устройство;
МК - микроконтроллер;
ПО - программное обеспечение;
РВ - реальное время.
Перечень фигур.
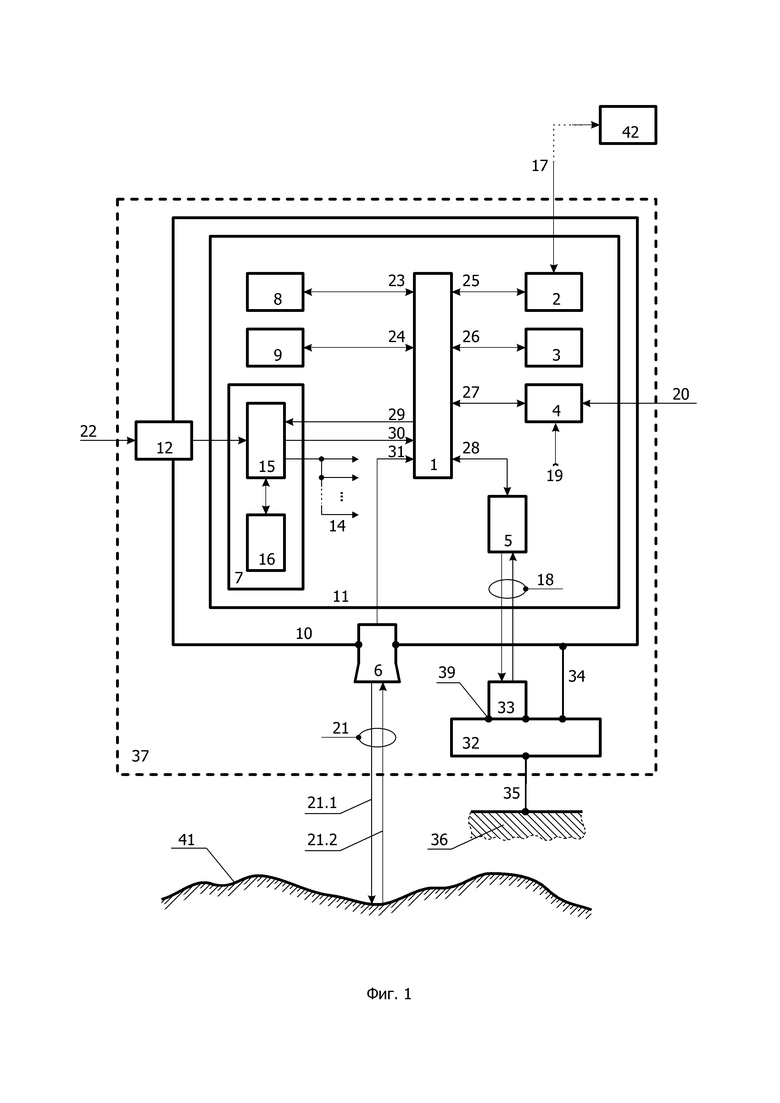
Фиг. 1. Структурная схема заявляемого устройства по варианту 1.
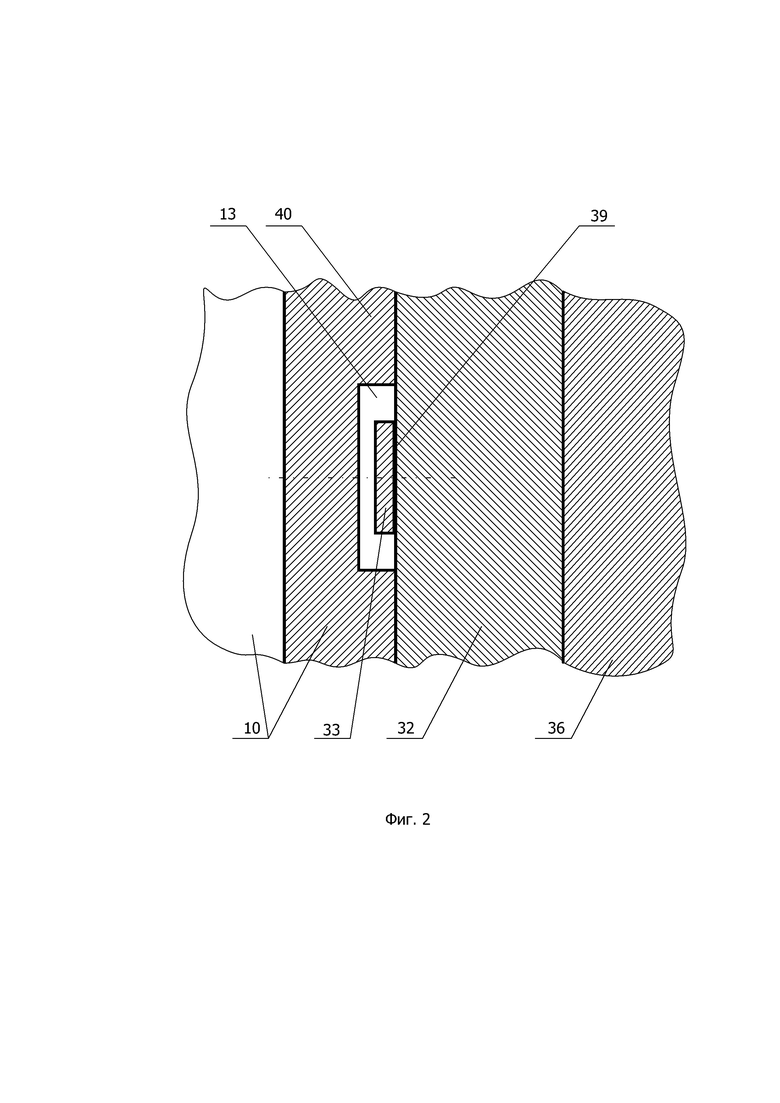
Фиг. 2. Схема установки RFID- метки.
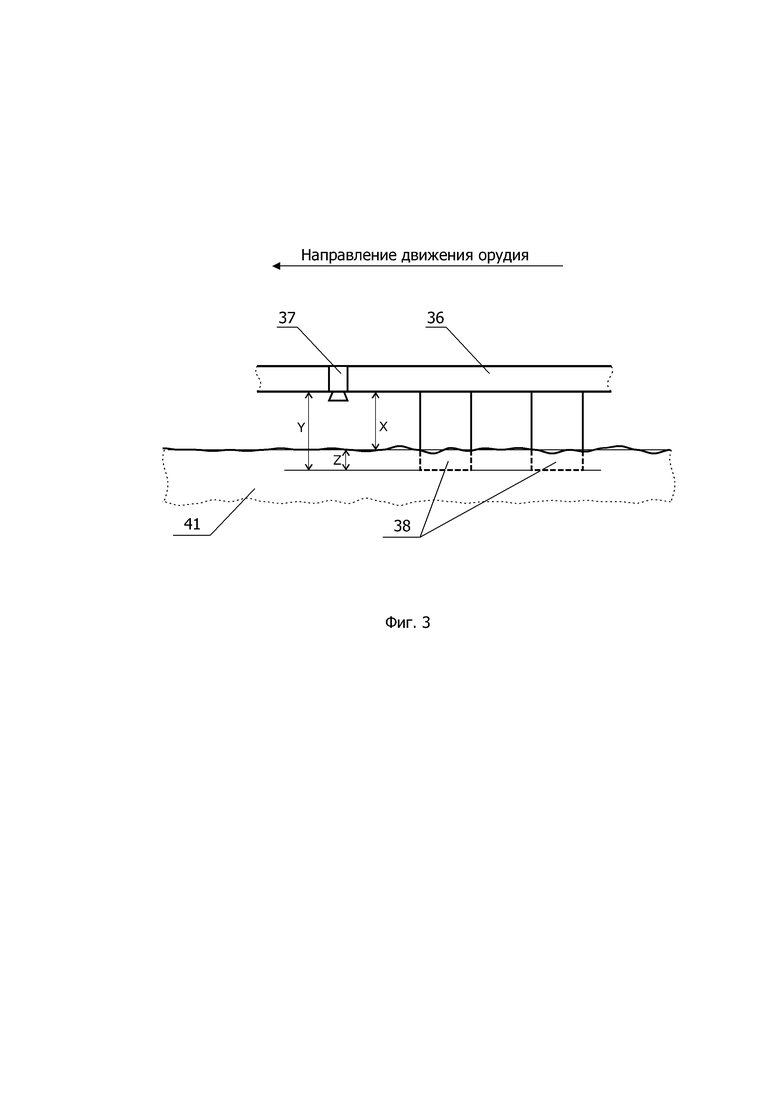
Фиг. 3 Схема определения глубины обработки почвы.
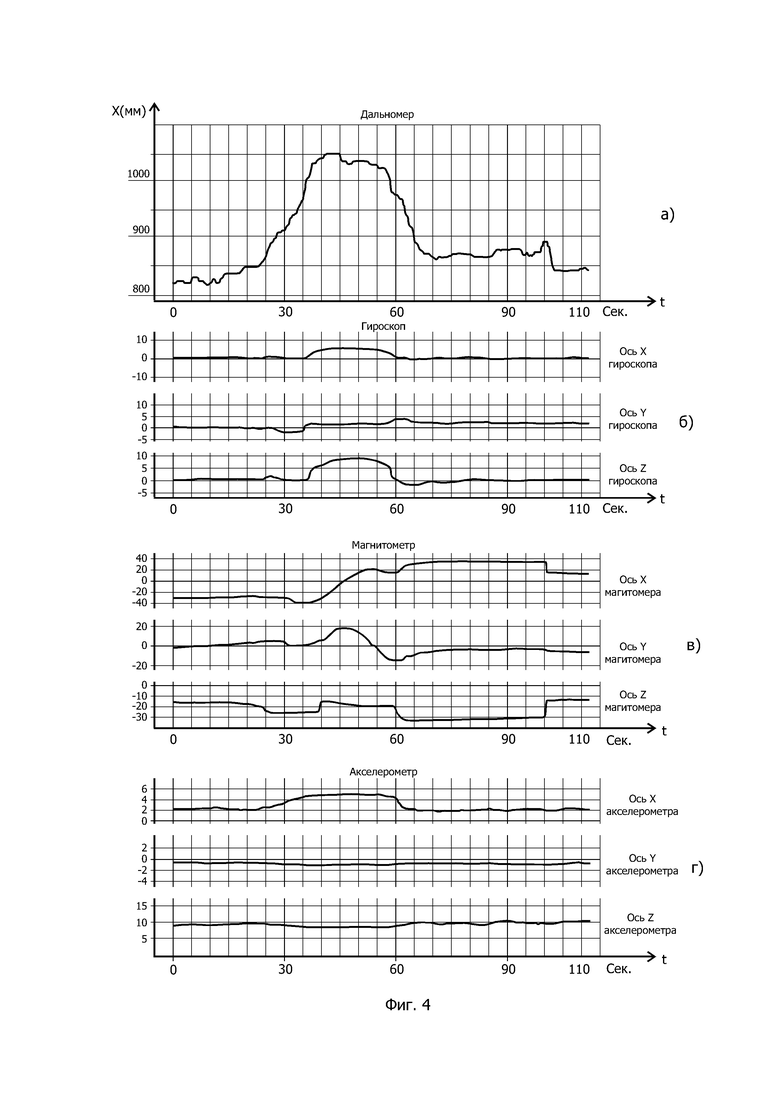
Фиг. 4 Графики данных от датчиков 4 и 6: 4.а- данные от дальномера 6; 4.б-данные от гироскопа; 4.в-данные магнитометра; 4.г- акселерометра.
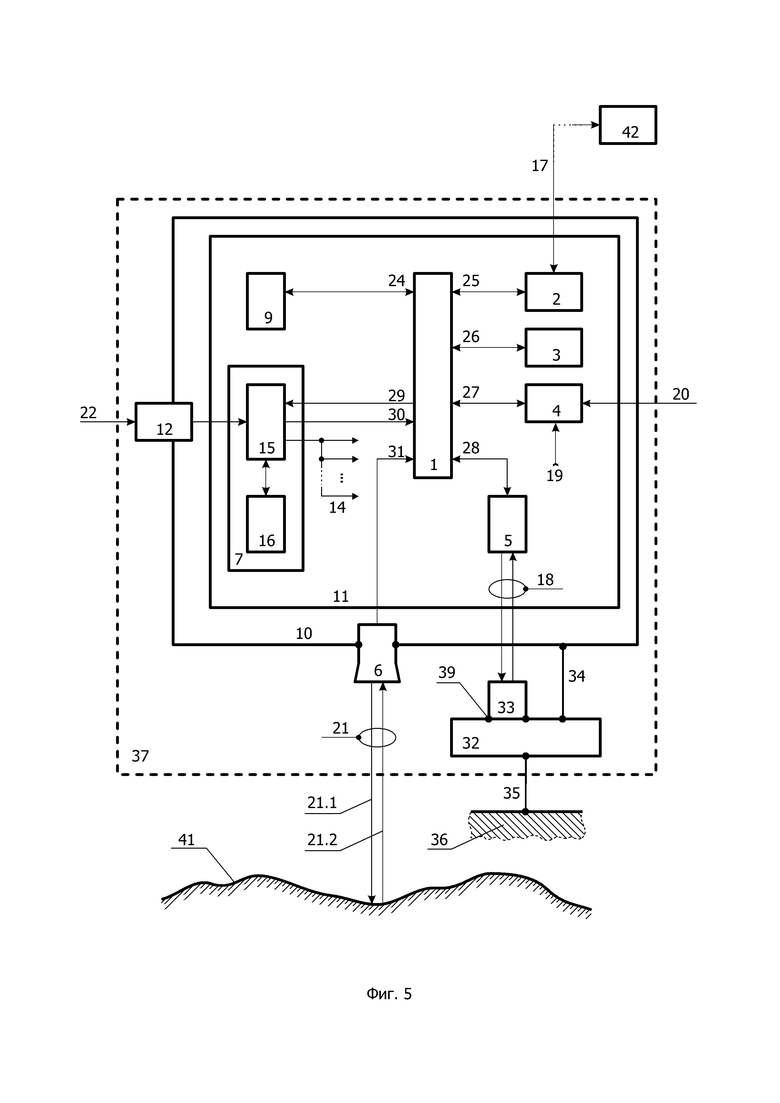
Фиг. 5 Структурная схема заявляемого устройства по варианту 2.
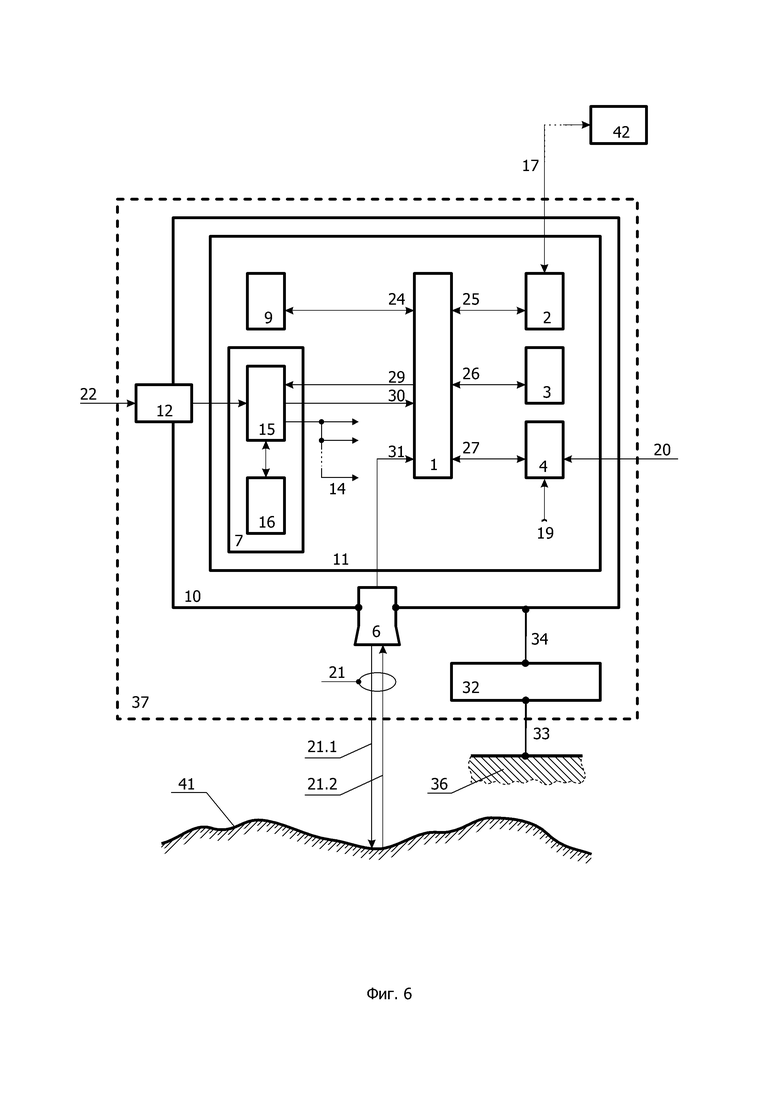
Фиг. 6 Структурная схема заявляемого устройства по варианту 3.
Перечень позиций на фиг. 1.
1 - блок микроконтроллера (МК);
2 - блок связи с удаленным компьютером 42;
3 - блок часов реального времени (РВ);
4 - датчик ориентации;
5 - блок чтения RFID-метки;
6 - дальномер ультразвуковой;
7 - блок питания;
8 - блок постоянного запоминающего устройства (ПЗУ);
9 - блок памяти;
10 - корпус устройства;
11 - плата печатная;
12 - разъем питания;
13 - ниша для размещения метки;
14 - шина питания;
15 - контроллер питания;
16 - батарея аккумуляторная;
17 - канал связи с удаленным компьютером;
18 - радиоканал;
19 - связь с гравитационным полем земли;
20 - связь с магнитным полем земли;
21 - канал акустический;
21.1 и 21.2 - сигнал акустический, соответственно, излучаемый и отраженный;
22 - сеть бортовая электропитания;
23 - первый, 24 - второй, 25 - третий, 26 - четвертый, 27 - пятый, 28 - шестой вход/выход блока МК;
29 - выход блока МК;
30, 31 - первый и второй входы блока МК, соответственно;
32 - платформа;
33 - RFID метка;
34 - первая связь жесткая механическая;
35 - вторая связь жесткая механическая;
36 - рама сельскохозяйственного орудия;
37 - заявляемое устройство;
38 - обрабатывающие органы сельскохозяйственного почвообрабатывающего орудия;
39 - клеевое соединение метки с платформой;
40 - стенка корпуса, соединяемая с платформой 32;
41 - почва, обрабатываемая сельхозорудием;
42- удаленный компьютер.
Перечень позиций на фиг. 5.
1 - блок микроконтроллера (МК);
2 - блок связи с удаленным компьютером 42;
3 - блок часов реального времени (РВ);
4 - датчик ориентации;
5 - блок чтения RFID-метки;
6 - дальномер ультразвуковой;
7 - блок питания;
9 - блок памяти;
10 - корпус устройства;
11 - плата печатная;
12 - разъем питания;
13 - ниша для размещения метки;
14 - шина питания;
15 - контроллер питания;
16 - батарея аккумуляторная;
17 - канал связи с удаленным компьютером;
18 - радиоканал;
19 - связь с гравитационным полем земли;
20 - связь с магнитным полем земли;
21 - канал акустический;
21.1 и 21.2 - сигнал акустический, соответственно, излучаемый и отраженный;
22 - сеть бортовая электропитания;
24 -первый, 25 - второй, 26 -третий, 27 - четвертый, 28 - пятый вход/выход блока МК;
29 - выход блока МК;
30, 31 - первый и второй входы блока МК, соответственно;
32 - платформа;
33 - RFID метка;
34 - первая связь жесткая механическая;
35 - вторая связь жесткая механическая;
36 - рама сельскохозяйственного орудия;
37 - заявляемое устройство;
38 - обрабатывающие органы сельскохозяйственного почвообрабатывающего орудия;
39 - клеевое соединение метки с платформой;
40 - стенка корпуса, соединяемая с платформой 32;
41 - почва, обрабатываемая сельхозорудием;
42- удаленный компьютер.
Перечень позиций на фиг. 6
1 - блок микроконтроллера (МК);
2 - блок связи с удаленным компьютером 42;
3 - блок часов реального времени (РВ);
4 - датчик ориентации;
6 - дальномер ультразвуковой;
7 - блок питания;
9 - блок памяти;
10 - корпус устройства;
11 - плата печатная;
12 - разъем питания;
14 - шина питания;
15 - контроллер питания;
16 - батарея аккумуляторная;
17 - канал связи с удаленным компьютером;
18 - радиоканал;
19 - связь с гравитационным полем земли;
20 - связь с магнитным полем земли;
21 - канал акустический;
21.1 и 21.2 - сигнал акустический, соответственно, излучаемый и отраженный;
22 - сеть бортовая электропитания;
24 -первый, 25 - второй, 26 -третий, 27 - четвертый вход/выход блока МК;
29 - выход блока МК;
30, 31 - первый и второй входы блока МК, соответственно;
32 - платформа;
34 - первая связь жесткая механическая;
35 - вторая связь жесткая механическая;
36 - рама сельскохозяйственного орудия;
37 - заявляемое устройство;
38 - обрабатывающие органы сельскохозяйственного почвообрабатывающего орудия;
41 - почва, обрабатываемая сельхозорудием;
42- удаленный компьютер.
Осуществление изобретения.
Заявляемое устройство мониторинга работы почвообрабатывающего орудия (варианты) предназначено для установки на сельскохозяйственное почвообрабатывающее орудие с целью получения в реальном времени последовательности отсчетов цифровых значений, содержащих как информацию о глубине обработки почвы, так и информацию, позволяющую производить выявление и фиксацию фактов некорректной эксплуатации сельскохозяйственного почвообрабатывающего орудия, таких как: несоблюдение правил выглублений, несоблюдение скоростного режима, несоблюдение координации при перемещении и пр., как во время хода указанного сельскохозяйственного орудия, так и во время его стоянки, путем измерения расстояния от рамы указанного орудия до почвы, регистрации полученных отсчетов расстояния и отсчетов, поступающих от датчика ориентации, и передачи этих отсчетов на удаленный компьютер.
Заявляемое устройство 37 по варианту 1 (фиг. 1, фиг. 2), жестко закрепляемое на раме 36 почвообрабатывающего орудия, содержит:
блок 1 микроконтроллера (МК), блок 2 связи с удаленным компьютером 42, блок 3 часов реального времени (РВ), датчик 4 ориентации, блок 5 чтения RFID-метки, блок 7 питания, ПЗУ 8, блок 9 памяти, расположенные на плате 11 печатной, закрепленной в корпусе 10, с расположенным на нем разъемом 12 питания.
В состав блока 7 питания может входить контроллер 15 питания и батарея 16 аккумуляторная (фиг. 1).
Устройство 37 также содержит датчик 6 глубины обработки почвы 41, в качестве которого применен ультразвуковой дальномер, закрепленный на корпусе 10 устройства 37 и соединенный электрическими связями с блоком 1 МК.
Блок 1 МК с помощью электрических связей подключен к другим блокам заявляемого устройства 37, а именно: первый 23 вход/выход блока 1 МК подключен ко входу/выходу блока 8 ПЗУ, второй 24 вход/выход блока 1 МК подключен ко входу/выходу блока 9 памяти, третий 25 вход/выход блока 1 МК подключен к первому входу/выходу блока 2 связи, четвертый 26 вход/выход блока 1 МК подключен ко входу/выходу блока 3 часов РВ, пятый 27 вход/выход блока 1 МК подключен ко входу/выходу датчика 4 ориентации, шестой 28 вход/выход блока 1 МК подключен ко входу/выходу блока 5 чтения метки, выход 29 блока 1 МК подключен к управляющему входу блока 7 питания, первый 30 вход блока 1 МК подключен к выходу состояния блока 7 питания, второй 31 вход блока 1 МК подключен к выходу дальномера 6 ультразвукового. Второй вход/выход блока 2 связи подключен к каналу 17 связи с удаленным компьютером 42. Разъем 12 питания с внутренней стороны подключен ко входу питания блока 7 питания, а его внешняя сторона предназначена для подключения кабеля сети 22 бортовой к устройству 37. К силовому выходу блока 7 питания подключена шина 14 питания, подключенная (на схеме не показано) ко входам питания всех расположенных на плате блоков и к блоку 6 дальномера ультразвукового.
Блок 5 чтения RFID-метки (метки радиочастотной идентификации) выполнен с возможностью получения сигнала от RFID-метки по радиоканалу 18 двунаправленному.
На раме 36 сельскохозяйственного орудия может быть установлено одно или несколько заявляемых устройств 37, в одном или в разных местах крепления на раме 37. RFID-метка 33 предназначена для идентификации как места крепления, так и самого сельскохозяйственного орудия, на котором расположено это место крепления. RFID-метка 33 закреплена на платформе 32 с помощью соединения 39 неразборного, например клеевого, а платформа 32 закреплена на месте крепления заявляемого устройства 37 на раме 36 сельскохозяйственного орудия с помощью неразборного соединения 35 (фиг. 2).
Заявляемое устройство мониторинга работы почвообрабатывающего орудия по варианту 2 (фиг. 5, фиг. 2), жестко закрепляемое на раме 36 почвообрабатывающего орудия, содержит:
блок 1 микроконтроллера (МК), блок 2 связи с удаленным компьютером, блок 3 часов реального времени (РВ), датчик 4 ориентации, блок 5 чтения RFID-метки, блок 7 питания, блок 9 памяти, расположенные на плате 11 печатной, закрепленной в корпусе 10, с расположенным на нем разъемом 12 питания.
В состав блока 7 питания может входить контроллер 15 питания и батарея 16 аккумуляторная (фиг. 5).
Устройство 37 также содержит датчик 6 глубины обработки почвы, в качестве которого применен ультразвуковой дальномер, закрепленный на корпусе 10 устройства 37 и соединенный электрическими связями с блоком 1 МК.
Блок 1 МК с помощью электрических связей подключен к другим блокам заявляемого устройства 37, а именно: первый 24 вход/выход блока 1 МК подключен ко входу/выходу блока 9 памяти, второй 25 вход/выход блока 1 МК подключен к первому входу/выходу блока 2 связи, третий 26 вход/выход блока 1 МК подключен ко входу/выходу блока 3 часов РВ, четвертый 27 вход/выход блока 1 МК подключен ко входу/выходу датчика 4 ориентации, пятый 28 вход/выход блока 1 МК подключен ко входу/выходу блока 5 чтения метки, выход 29 блока 1 МК подключен к управляющему входу блока 7 питания, первый 30 вход блока 1 МК подключен к выходу состояния блока 7 питания, второй 31 вход блока 1 МК подключен к выходу дальномера 6 ультразвукового. Второй вход/выход блока 2 связи подключен к каналу 17 связи с удаленным компьютером. Разъем 12 питания с внутренней стороны подключен ко входу питания блока 7 питания, а его внешняя сторона предназначена для подключения кабеля сети 22 бортовой к устройству 37. К силовому выходу блока 7 питания подключена шина 14 питания, подключенная (на схеме не показано) ко входам питания всех расположенных на плате блоков и к блоку 6 дальномера ультразвукового.
Блок 5 чтения RFID-метки (метки радиочастотной идентификации) выполнен с возможностью получения сигнала от RFID-метки по радиоканалу 18 двунаправленному.
На раме 36 сельскохозяйственного орудия может быть установлено одно или несколько заявляемых устройств 37, в одном или в разных местах крепления на раме 37. RFID-метка 33 предназначена для идентификации как места крепления, так и самого сельскохозяйственного орудия, на котором расположено это место крепления. RFID-метка 33 закреплена на платформе 32 с помощью соединения 39 неразборного, например клеевого, а платформа 32 закреплена на месте крепления заявляемого устройства 37 на раме 36 сельскохозяйственного орудия с помощью неразборного соединения 35 (фиг. 5, 2).
Заявляемое устройство мониторинга работы почвообрабатывающего орудия по варианту 3 (фиг. 6), жестко закрепляемое на раме 36 почвообрабатывающего орудия, содержит:
блок 1 микроконтроллера (МК), блок 2 связи с удаленным компьютером, блок 3 часов реального времени (РВ), датчик 4 ориентации, блок 7 питания, блок 9 памяти, расположенные на плате 11 печатной, закрепленной в корпусе 10, с расположенным на нем разъемом 12 питания.
В состав блока 5 питания может входить контроллер 15 питания и батарея 16 аккумуляторная (фиг. 6).
Устройство 37 также содержит датчик 6 глубины обработки почвы, в качестве которого применен ультразвуковой дальномер, закрепленный на корпусе 10 устройства 37 и соединенный электрическими связями с блоком 1 МК.
Блок 1 МК с помощью электрических связей подключен к другим блокам заявляемого устройства 37, а именно: первый 24 вход/выход блока 1 МК подключен ко входу/выходу блока 9 памяти, второй 25 вход/выход блока 1 МК подключен к первому входу/выходу блока 2 связи, третий 26 вход/выход блока 1 МК подключен ко входу/выходу блока 3 часов РВ, четвертый 27 вход/выход блока 1 МК подключен ко входу/выходу датчика 4 ориентации, выход 29 блока 1 МК подключен к управляющему входу блока 7 питания, первый 30 вход блока 1 МК подключен к выходу состояния блока 7 питания, второй 31 вход блока 1 МК подключен к выходу дальномера 6 ультразвукового. Второй вход/выход блока 2 связи подключен к каналу 17 связи с удаленным компьютером 42. Разъем 12 питания с внутренней стороны подключен ко входу питания блока 7 питания, а его внешняя сторона предназначена для подключения кабеля сети 22 бортовой к устройству 37. К силовому выходу блока 7 питания подключена шина 14 питания, подключенная (на схеме не показано) ко входам питания всех расположенных на плате блоков и к блоку 6 дальномера ультразвукового.
Ниже следует более подробное описание блоков устройства по всем трем вариантам устройства.
Блок 1 МК осуществляет управление всеми блоками устройства 37 и обмен данными между ними. Он работает под управлением программного обеспечения (ПО), расположенного в его внутреннем ПЗУ. Блок 1 МК может быть выполнен, например, на микросхеме STM32F746ZG (https://www.st.com/en/microcontrollers-microprocessors/stm32f746zg.html, опубликовано 05.06.2012) с необходимой для ее работы обвязкой (обвязка - элементы и схема, необходимые для подключения и нормальной работы микросхемы в составе какого-либо устройства. Википедия).
Блок 2 связи осуществляет двухстороннюю связь по физическому каналу 17 связи заявляемого устройства 37 с удаленным компьютером 42. Физический канал 17 связи может быть как проводной, так и беспроводной. Например, беспроводный канал может быть построен с использованием технологии Wi-Fi, при этом в качестве блока 2 связи может быть использован модуль ATWINC1510 (https://www.digikey.com/product-detail/en/microchip-technology/ATWINC1510-MR210PB/ATWINC1510-MR210PB-ND/5358401, опубликовано 11.04.2017). Техническое решение, использующее технологию Wi-Fi для реализации канала 17 связи, приведено в качестве конкретного, но не ограничивающего примера. Специалисту в данной области техники будет понятно, что для реализации канала 17 связи возможно применение и других, не изменяющих заявленное изобретение по существу, технических решений, с использованием как беспроводных, так и проводных каналов связи.
Блок 3 часов РВ осуществляет отсчет текущего времени, которое используется для привязки данных, поступающих от дальномера 6 ультразвукового и от датчика 4 ориентации, к текущему времени. Блок 3 часов РВ может быть выполнен, например, на микросхеме DS1339A (https://www.maximintegrated.com/en/products/analog/real-time-clocks/DS1339A.html, опубликовано 24.02.2018) с необходимой для ее работы обвязкой, включающей кварцевый резонатор и элемент электропитания.
Датчик 4 ориентации предназначен для получения информации о положении заявляемого устройства 37 в пространстве. Информация, полученная от датчика 4 после обработки на удаленном компьютере 42, используется для контроля качества работ, производимых почвообрабатывающим сельскохозяйственным орудием, например, для контроля правильности выполнения операции выглубления на соответствующих участках обрабатываемого поля. Так же эта информация используется для фиксации фактов несанкционированного изменения параметров сельхозорудия. Датчик 4 ориентации содержит: трехосный акселерометр, трехосный гироскоп и трехосный геомагнитометр. В своей работе он использует гравитационное поле 14 и магнитное поле 15 Земли. Датчик 4 ориентации может быть выполнен, например, на основе электронного модуля BNO055 (https://www.bosch-sensortec.com/products/smart-sensors/bno055.html, опубликовано 30.01.2016), который содержит все перечисленные выше элементы.
Блок 5 чтения RFID-метки (варианты 1 и 2 устройства) предназначен для работы по радиоканалу 18 с RFID-меткой 33, закрепленной на платформе 32, установленной на раме сельскохозяйственного орудия. В качестве блока 5 чтения RFID-метки может быть использован предназначенный для этого модуль, например RFID-RC522 (https://3d-diy.ru/wiki/arduino-moduli/rfid-modul-rc522/, опубликовано 30.01.2016), содержащий электронную схему и приемопередающую антенну.
Дальномер 6 ультразвуковой предназначен для измерения расстояния Xi от точки крепления заявляемого устройства 37 на раме сельхозорудия до обрабатываемой этим сельхозорудием почвы. Значения Xi в дальнейшем, на удаленном компьютере 42, используются для расчета глубины обработки почвы. В заявляемом устройстве 37 применен ультразвуковой дальномер т.к. механические устройства, применяемые для таких измерений, имеют сложную конструкцию, обладают малой надежностью и имеют большую погрешность измерения, а показания оптических устройств, предназначенных для подобных измерений, сильно зависят от погодных условий. В заявляемом устройстве 37 может быть использован ультразвуковой прецизионный всепогодный интеллектуальный дальномер марки MB7389 (https://www.maxbotix.com/Ultrasonic_Sensors/MB7389.htm, опубликовано 04.12.2015). Он закреплен на нижнем торце корпуса 10 заявляемого устройства 37 и соединен электрической связью с входом 31 блока 1 МК.
Блок 7 питания предназначен для обеспечения питанием всех блоков заявляемого устройства 37 через подключенную к нему шину 14 питания, к которой подключены входы питания (на схеме не показано) указанных блоков. Блок 7 питания состоит из контроллера 15 питания и батареи 16 аккумуляторной (фиг. 1, 5, 6). Контроллер 15 питания предназначен для поддержания непрерывно во времени нужного уровня стабилизированного напряжения питания на шине 14 питания как при колебаниях напряжения (UБСП) в сети 22 бортовой питания, так и при выключении UБСП в сети 22 и, при необходимости, для заряда батареи 16 аккумуляторной. Для обеспечения непрерывности питания шины 14 при исчезновении UБСП напряжения бортовой сети 22 контроллер 15 питания отключается от сети 22 и подключается к батарее 16 аккумуляторной. Батарея 16 аккумуляторная предназначена для обеспечения питания блоков заявляемого устройства 37, когда отсутствует напряжение питания UБСП. Контроллер 15 питания может быть выполнен, например, на последовательно включенных микросхемах LM76003 (http://www.ti.com/product/LM76003, опубликовано 28.10.2017), BQ24070 (http://www.ti.com/product/BQ24070, опубликовано 06.09.2011) и TPS63021 (http://www.ti.com/product/TPS63021, опубликовано 20.07.2014) с соответствующей обвязкой. В качестве батареи 16 аккумуляторной может быть использован один или несколько аккумуляторов типа NCR18650B LiIon MH12210 (http://batterex.com.ua/rechargeable-batteries/18650_batteries/18650_unprotected/18650_panasonic_ncr18650b_3400, опубликовано 05.11.2019.).
Блок 8 ПЗУ (вариант 1 устройства) предназначен для хранения цифровых сертификатов, криптографических ключей и другой информации, необходимой для шифрования информационных пакетов, передаваемых заявляемым устройством 37 на удаленный компьютер 42, а также для выполнения процедур идентификации, аутентификации и авторизации заявляемого устройства 37 в ходе установления соединения с удаленным компьютером 42. Указанная информация записывается в блок 8 ПЗУ изготовителем заявляемого устройства 37. Блок 8 ПЗУ может быть выполнен, например на микросхеме AT25DF321A (https://www.adestotech.com/wp-content/uploads/doc3686.pdf, опубликовано 02.2019 г.), представляющей собой электрически перепрограммируемое постоянное запоминающее устройство (EEPROM).
Блок 9 памяти, представляющий собой энергонезависимое запоминающее устройство, предназначен для временного хранения информационных пакетов, отправляемых на удаленный компьютер 42. Информационные пакеты формируются блоком 1 МК из данных, поступающих в реальном времени от дальномера 6, датчика 4 ориентации, блока 3 часов РВ, блока 5 чтения метки и блока 7 питания. Блок 9 памяти может быть выполнен, например, в виде электронного узла, включающего в себя модуль памяти TS32GUSDC10I, https://www.chipdip.ru/product/ts32gusdc10i-transcend-industrial-32gb опубликовано 28.01.2017) и разъем (не показан). При этом модуль памяти TS32GUSDC10I представляет собой EEPROM. Он выполнен в формате microSD. Разъем (не показан) предназначен для механической фиксации указанного модуля на плате 11 печатной и для подключения этого модуля к цепям электрической схемы заявляемого устройства 37.
Корпус 10 представляет собой герметичную коробку. Внутри корпуса 10 располагается плата 11 печатная. В одну их стенок корпуса вмонтирован герметичный разъем 12 питания. В расположенной со стороны платформы 32 стенке 40 корпуса, выполнена ниша 13 для размещения RFID-метки.
Корпус 10 выполнен радиопрозрачным для свободного прохождения сквозь него электромагнитного излучения канала 17 связи и радиоканала 18.
Корпус 10 содержит крепежные элементы. Они предназначены для установки и фиксации корпуса 10 на платформе 32 с помощью первой 34 жесткой связи, представляющей собой болтовое соединение.
Платформа 32 предназначена для фиксации заявляемого устройства 37 на раме 36 (фиг. 1, 5,6) почвообрабатывающего орудия. Для этого платформа 32 соединена с рамой 36 с помощью второй 35 жесткой связи, представляющей собой неразборное соединение, например сварное или клеевое. Платформа 32 выполнена в виде плоской металлической пластины и может иметь крепежные отверстия для болтового соединения первой 34 жесткой связи.
На платформе 32 (вариант 1, 2 устройства) со стороны корпуса 10 закреплена клеевым соединением 39 RFID-метка 33, которая при сборке, во время монтирования корпуса 10 на платформу 32, помещается в нишу 13 в стенке 40 корпуса 10 устройства 37 (фиг. 2). Благодаря такому расположению достигается минимальное расстояние от расположенного на плате 11 печатной блока 5 чтения RFID-метки до RFID-метки 33, что обеспечивает надежную связь между ними по радиоканалу 18 в условиях наличия больших отражений и экранирования радиосигнала металлическими конструкциями сельскохозяйственного орудия.
Работа.
Устройство 37 может быть установлено на раму самоходного транспортного средства или на раму прицепного сельскохозяйственного почвообрабатывающего орудия, такого как плуг, культиватор, борона, мульчировщик, сеялка, и т.п.
На раме одного почвообрабатывающего сельхозорудия, в зависимости от его конструкции и решаемых задач, может быть размещено от одного до трех или более заявляемых устройств 37.
После установки заявляемого устройства 37 на указанное выше сельскохозяйственное орудие (фиг. 3) измеряют расстояние Y от рамы 36 сельскохозяйственного орудия до нижнего края обрабатывающих рабочих органов 38, таких как лемех плуга, лапа культиватора, диск бороны, сошника сеялки и т.д. Далее значение Y считается постоянным и известным. Заявляемое устройство 37 с помощью ультразвукового дальномера 6 измеряет расстояние Х от рамы 36 до почвы 41. Глубина обработки почвы Z является разницей значений Y и Х.
Работа устройства 37 по любому из вариантов заключается в том, что им производится измерение расстояния Х во время движения сельскохозяйственного почвообрабатывающего орудия по полю, в режиме реального времени, с точностью±(10) мм. При этом данные, получаемые от дальномера 6 и датчика 4 ориентации блоком 1 МК, упаковываются, сжимаются, шифруются и записываются им в блок 9 памяти, после чего, с помощью блока 2 связи и подключенного к нему канала 17 связи, эти данные передаются на удаленный компьютер 42.
Задачи, решаемые заявляемым устройством по любому из вариантов в процессе работы:
1. Получение информации содержащей сведения о фактической глубине обработки почвы 41 сельскохозяйственным почвообрабатывающим орудием.
2. Получение информации позволяющей производить выявление и фиксацию фактов некорректной эксплуатации сельскохозяйственного почвообрабатывающего орудия (отсутствие выглублений указанного орудия при разворотах, высокая скорость его передвижения на перегонах, высокая и низкая скорость обработки почвы 41 этим орудием и пр.).
3. Получение информации, позволяющей производить выявление и фиксацию фактов несанкционированного изменения параметров сельскохозяйственного орудия, в случаях, когда эти изменения сказываются на глубине обработки почвы.
Работа заявляемого устройства 37 происходит следующим образом.
При включении напряжения питания UБСП сети 22 бортовой начинает работать блок 7 питания и на его силовом выходе генерируется напряжение, поступающее на шину 14 питания, с которой оно поступает на все блоки устройства 37. При этом блок 1 МК начинает работать под управлением программного обеспечения (ПО), расположенного в его внутреннем ПЗУ. В начале работы блок 1 МК устанавливает все электронные блоки заявляемого устройства 37 в исходное состояние и инициализирует их работу. В дальнейшем блок 1 МК осуществляет управление несколькими, протекающими одновременно, процессами, обеспечивающими работу заявляемого устройства 37. Основные из них:
а) прием, обработка и регистрация данных дальномера 6 ультразвукового;
б) прием, обработка и регистрация данных датчика 4 ориентации;
в) передача данных на удаленный компьютер 42;
г) управление блоком питания.
Процесс (а) запускается после получения очередного отсчета Xi от дальномера 6. Указанный отсчет формируется следующим образом. Дальномер 6 с помощью своего излучателя генерирует в окружающее его воздушное пространство акустический сигнал, представляющий собой импульсно-модулированные акустические колебания с несущей частотой 42 кГц, находящейся в ультразвуковом диапазоне. Диаграмма направленности излучателя имеет небольшую ширину, что позволяет сконцентрировать значительную долю энергии излучаемого дальномером 6 сигнала 21.1 в одном направлении, а именно в направлении почвы 41, расстояние до которой надо измерить (фиг. 1, 5, 6). Далее, акустический сигнал 21.2, отраженный от почвы 41, улавливается приемным трактом дальномера 6 ультразвукового, электронным блоком которого фиксируется промежуток времени Δt между моментом излучения акустического сигнала 21.1 и моментом поступления отраженного акустического сигнала 21.2. По полученному значению Δt дальномер 6 ультразвуковой вычисляет расстояние от него до почвы 41 и получает очередной отсчет Xi расстояния, используя который система обработки может определить глубину обработки почвы 41. Полученный отсчет Xi поступает на выход дальномера 6 ультразвукового и далее на вход 31 блока микроконтроллера. При использовании в заявляемом устройстве 37 в качестве дальномера 6 ультразвукового вышеуказанного ультразвукового прецизионного всепогодного дальномера марки MB7389 частота поступления на его выход отсчетов Xi равна 6.67 Гц.
Очередной отсчет Xi с выхода дальномера 6 поступает на вход 31 блока 1 МК. При этом блок 1 МК через четвертый 26 вход/выход читает содержимое внутренних регистров блока 3 часов реального времени, содержащих текущее время Ti, упаковывает и шифрует полученные отсчеты Xi и Ti в информационный пакет Pi и отправляет его через вход/выход 24 в блок 9 памяти для записи и последующего хранения до момента его отправки на удаленный компьютер 42. На этом процесс (а) завершается. Одновременно может существовать несколько таких процессов, т.к., например, новый отсчет Xi+1 может поступить до завершения обработки отсчета Xi.
Процесс (б) запускается при поступлении очередного отсчета Vj от датчика 4 ориентации. Очередной отсчет Vj состоит из очередных отсчетов значений от гироскопа, магнитометра и акселерометра. Они поступают из соответствующих внутренних регистров датчика 4 ориентации на его вход/выход и далее на вход/выход 27 блока 1 МК. При этом блок 1 МК через вход/выход 26 читает содержимое внутренних регистров блока 3 часов реального времени, содержащих текущее время Tj, упаковывает и шифрует полученные отсчеты Vj и Tj в информационный пакет Pj и отправляет его через вход/выход 24 в блок 9 памяти для записи и последующего хранения до момента его отправки на удаленный компьютер 42. На этом процесс (б) завершается. Одновременно может существовать несколько таких процессов, т.к., например, новый отсчет Vj+1 может поступить до завершения обработки отсчета Vj.
Процесс (в) запускается в начале работы устройства 37. Он отслеживает наличие информационных пакетов в блоке 9 памяти, предназначенных для отправки на удаленный компьютер 42. Если такие пакеты есть, процесс (в) инициирует блок 2 связи на его подключение каналу 17 связи. Затем процесс (в) устанавливает связь с удаленным компьютером 42.
Установление и поддержание связи происходит с использованием процедур идентификации, аутентификации и авторизации, при выполнении которых используется информация, хранящаяся в блоке 8 ПЗУ (для вариантов 1 и 2).
После установления соединения информационные пакеты, готовые к передаче, передаются блоком 1 МК из блока 9 памяти, через ход/выход 24 блока 1 МК и через вход/выход 25 блока 1 МК на первый вход/выход блока 2 связи, который передает их далее в канал 17 связи. После завершения передачи последнего пакета, требующего отправки на удаленный компьютер 42, связь по каналу 17 связи завершается и процесс (в) переходит в состояние ожидания новых информационных пакетов, готовых к передаче на удаленный компьютер 42.
Процесс (г), осуществляющий управление блоком 7 питания, запускается в начале работы заявляемого устройства 37 и существует до окончания его работы. При этом работа устройства 37 подчиняется следующим правилам:
1. Устройство 37 работает (осуществляет сбор информации от датчиков, ее обработку и передачу по каналу 17 связи на удаленный компьютер 42) всегда, когда на разъеме 12 питания присутствует напряжение UБСП (сеть 22 бортовая включена).
2. Если заряд батареи 16 аккумуляторной не полный, и на разъеме 12 питания присутствует напряжение UБСП (сеть 22 бортовая включена), контроллер 15 питания осуществляет заряд батареи 16 аккумуляторной.
3. Если на разъеме 12 питания напряжение UБСП выключается, заявляемое устройство 37 переключается на работу от батареи 16 аккумуляторной. В этом случае заявляемое устройство 37 осуществляет сбор информации от датчиков, ее обработку и запись в блок 9 памяти, но передача информации по каналу 17 связи не ведется. При разряде батареи 16 аккумуляторной до заданного значения, заявляемое устройство 37 завершает все процессы и выключается.
4. Если на разъеме 12 питания отсутствует UБСП (Сеть 22 бортовая выключена), а устройство 37 работает от батареи 16 аккумуляторной, и если оно находится без движения более заданного интервала времени (TC1), например более 4 часов, то блок 1 МК завершает все процессы и выключает устройство 37. Наличие движения заявляемого устройства 37 или его отсутствие определяется блоком 1 МК на основании данных, поступающих от дальномера 6 и датчика 4 ориентации.
Исходя из выше сказанного, включение неработающего заявляемого устройства 37 происходит всегда, когда включается напряжение питания UБСП в сети 22 бортовой. При этом, во время последующей работы, контроллер 15 питания самостоятельно отслеживает уровень напряжения батареи 16 аккумуляторной и при необходимости включает ее зарядку. При выключении напряжения питания UБСП в сети 22 бортовой контроллер 15 питания самостоятельно отключается от нее и подключается к батарее 16 аккумуляторной. При этом напряжение на шине 14 питания не изменяется. Процесс (г) контролирует состояние блока 7 питания с помощью логических и аналоговых сигналов, поступающих из блока 7 питания на вход 30 блока 1 МК. Аналоговые сигналы представляют собой напряжения, характеризующие работу блока 7 питания. Они, через заданные интервалы времени, измеряются внутренним аналого-цифровым преобразователем (АЦП) блока 1 МК. Полученные значения этих напряжений упаковываются, сжимаются и шифруются, после чего блок 1 МК формирует из них информационные пакеты, которые затем записывает в блок 9 памяти для последующей передачи на удаленный компьютер 42. Процесс (г) так же сравнивает полученные значения этих напряжений с эталоном и, если эти значения выходят за пределы допустимых значений, блоком 1 МК фиксируется аварийная ситуация, после чего он завершает все процессы и выключает устройство 37. Одним из логических сигналов, поступающих на вход 30 блока 1 МК, является сигнал, указывающий на присутствие напряжение питания UБСП в сети 22 бортовой. Выключение напряжения в сети 22 означает, что трактор, буксирующий сельскохозяйственное орудие, остановлен и его двигатель заглушен. При этом, как сказано выше, контроллер 15 питания самостоятельно переключается на батарею 16 аккумуляторную, и энергия на питание заявляемого устройства 37 начинает поступать от нее. Блок 1 МК начинает контролировать время обездвиженности устройства 37 по содержимому отсчетов, поступающих от дальномера 6 и датчика 4 ориентации. Когда время обездвиженности достигает заданного значения TC1, блок 1 МК завершает все процессы и выключает заявляемое устройство 37. Время TC1 необходимо для фиксации фактов несанкционированного изменения параметров сельскохозяйственного орудия. Оно задается при настройке заявляемого устройства 37. Если устройство 37 было включено, и работало от батареи 16 аккумуляторной, то при включении напряжения питания UБСП в сети 22 бортовой, контроллер 15 питания самостоятельно отключается от батареи 16 аккумуляторной и подключается к сети 22 бортовой, а блок 1 МК включает питание блока 2 связи, после чего работа устройства 37 полностью восстанавливается.
Все информационные пакеты, кроме самих значений отсчетов, таких как отсчет от дальномера 6, отсчеты от датчика 4 ориентации, отсчеты значений напряжений от блока 7 питания, содержат идентификатор типа отсчета, метку времени и идентификатор информационного пакета, включающий идентификатор заводского номера заявляемого устройства 37 и идентификатор RFID-метки 33. Идентификатор заводского номера заявляемого устройства 37 считывается блоком 1 МК из регистра заводского номера микросхемы микроконтроллера STM32F746ZG блока 1 МК. В вариантах 1 и 2 устройства идентификатор метки считывается блоком 5 чтения метки по команде от блока 1 МК из RFID-метки 33, закрепленной на платформе 32 рамы 36.
Процесс формирования блоком 1 МК информационных пакетов из данных, поступающих от датчиков и от других источников информации, включает операции сжатия и шифрования. Сжатие выполняется с целью уменьшения объема, передаваемой по каналу 17 связи информации, что необходимо из-за его ограниченной пропускной способности. Шифрование поступающей информации производится для исключения возможности несанкционированного доступа к ней как во время хранения этой информации в блоке 9 памяти, так и во время передачи этой информации по каналу 17 связи. В устройстве по варианту 1 при выполнении вышеуказанных операций сжатия и шифрования получаемой информации блок 1 МК использует данные, хранящиеся в блоке 8 ПЗУ.
На фиг. 4 показаны графики, построенные по данным, представляющим собой измеренные значения параметров, полученных от дальномера 6 и от датчика 4 ориентации при обработке почвы 41 сельскохозяйственным орудием (культиватором). На указанных графиках оси абсцисс являются осями времени t в секундах, а оси ординат соответствуют конкретным измеряемым параметрам. Длительность приведенных фрагментов равна 110 секунд. Все графики синхронизированы друг с другом во времени. После обработки этих данных удаленным компьютером 42 специалисты делают выводы о качестве обработки почвы 41 культиватором. При обнаружении некорректно обработанных участков поля (или поля в целом) владелец может запустить обработку повторно.
На фиг. 4.а показан график, построенный по данным, поступающим от дальномера 6; на фиг. 4.б приведен график, построенный по данным, поступившим от гироскопа; на фиг. 4.в приведен график, построенный по данным, поступившим от магнитометра; на фиг. 4.г приведен график, построенный по данным, поступившим от акселерометра. Все эти данные поступили во время движения культиватора при обработке поля. Выбран характерный момент движения культиватора, а именно, движение в момент разворота культиватора на 180 градусов в конце поля. На графиках показаны исходные, не обработанные данные. На графиках хорошо видны характерные моменты при развороте орудия:
1) 0 - 10 секунд. Линейное движение культиватора в конце поля. Дальномер на высоте 820 мм над почвой 41.
2) 10 - 35 секунд. Начало выглубления, подъем обрабатывающих органов 38 культиватора из почвы 41. При этом дальномер 6 поднимается на высоту 1050 мм над почвой 41.
3) 35 - 55 секунд. Выезд трактора с культиватором с текущей полосы за пределы обрабатываемого участка поля, разворот его на 180° и заход на новую полосу обрабатываемого участка поля.
4) 55 - 65 секунд. Опускание обрабатывающих органов 38 до почвы 41, дальномер 6 опускается с высоты 1050 мм на высоту 870 мм.
5) 65 - 100 секунд. Движение обрабатывающих органов 38 культиватора по поверхности почвы 41. Дальномер 6 на высоте 870 мм над почвой 41.
6) 100 - 110 секунд. Заглубление обрабатывающих органов 38 культиватора на нужную глубину. В конце операции дальномер 6 расположен на высоте 820 мм над почвой 41.
Разворот культиватора на 180° и изменения положения заявляемого устройства 37 относительно магнитного поля земли хорошо видны по показаниям магнитометра на фиг. 4.в.
Изменения положения заявляемого устройства 37 при этих операциях хорошо видны по показаниям гироскопа фиг. 4.б.
Ускорения, испытываемые заявляемым устройством 37 во время операций выглубления и разворота, хорошо видны на графике фиг. 4.г.
Приведенные на фиг. 4 графики показывают практическую ценность заявляемого устройства 37, а именно:
- получение сведений о фактической глубине обработки почвы 41 сельскохозяйственным почвообрабатывающим орудием;
- выявление и фиксация фактов некорректной эксплуатации сельскохозяйственного почвообрабатывающего орудия, например отсутствие выглублений при разворотах, высокая скорость передвижения орудия на перегонах, высокая и низкая скорость обработки почвы 41;
- выявление и фиксация фактов несанкционированного изменения параметров сельскохозяйственного орудия.
Все это позволяет сельхозпредприятию в конечном итоге повысить качество выпускаемой продукции, поднять производительность труда и повысить его экономическую эффективность.
Промышленная применимость.
Заявляемое устройство мониторинга работы почвообрабатывающего орудия по любому из вариантов позволяет обеспечить непрерывную фиксацию с высокой точностью и частотой процесса измерения глубины обработки почвы и сохранение на удаленном компьютере владельца поля всей последовательности производимых измерений, с идентификатором обрабатывающего сельскохозяйственного орудия и других важных параметров, давая таким образом возможность получать наиболее достоверные информационные сведения о качестве выполнения технологического процесса почвообрабатывающими машинами, орудиями, позволяя принимать последующие решения.
Заявляемое устройство позволяет фермеру изучать информацию о качестве обработки почвы во время выполнения сельскохозяйственных работ, позволяет сохранять измеренные значения, определенные датчиками, в зависимости от конкретного местоположения, и таким образом, создавать топологическую карту состояния почвы.
Заявляемое устройство найдет применение в системе точного (координатного) земледелия.
Источники информации.
1. Патент РФ на полезную модель №102108 Устройство для определения фактической глубины хода рабочих органов почвообрабатывающих машин и орудий. Заявка №2010139193, МПК G01B 13/00. Патентообладатель ГНУ СКС ВИМ Россельхозакадемии (RU). Опубликовано 10.02.2011. Прекратил действие.
2. Патент РФ на полезную модель №110476. Устройство для определения глубины обработки почвы. Заявка №2011111469; МПК G01B 13/00. Патентообладатель ФГНУ "Росинформагротех» (RU). Опубликовано: 20.11.2011. Прекратил действие.
3. Патент РФ на полезную модель №191181 Устройство измерения глубины обработки почвы при испытании почвообрабатывающих машин и орудий. Заявка №2019108378; МПК G01B 3/00, A01B 63/00. Патентообладатель ФГБНУ "Росинформагротех" (RU). Опубликовано: 29.07.2019. Наиболее близкий аналог.
4. Ультразвуковой датчик приближения Эскорт ДГВ-200. Интернет-ресурс https://www.fmeter.ru/infocenter/helpful/dgv-200-glubina-poseva/. Опубликовано 13.09.2019;
https://www.fmeter.ru/download/_ftp/ultrazvukovoj-datchik-priblizhenija/eskort-DVG-200/Руководство_пользователя_DGV-200.pdf. Опубликовано 13.09.2019.
| название | год | авторы | номер документа |
|---|---|---|---|
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| Система изменения частоты собственных колебаний секций почвообрабатывающего орудия | 2024 |
|
RU2822739C1 |
| Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона | 2021 |
|
RU2770713C1 |
| Контейнер для хранения и транспортировки проб биологических объектов | 2017 |
|
RU2734272C2 |
| Система управления процессом бурения при установке винтовых свай | 2018 |
|
RU2702305C2 |
| Система регулирования давления в контуре гидравлической защиты секций почвообрабатывающего орудия | 2024 |
|
RU2833893C1 |
| Система регулирования жесткости крепления секции почвообрабатывающего орудия к раме | 2024 |
|
RU2833892C1 |
| УСТРОЙСТВО СОЗДАНИЯ ДОВЕРЕННОЙ СРЕДЫ ДЛЯ КОМПЬЮТЕРОВ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМ | 2013 |
|
RU2538329C1 |
| Система регулирования жесткости крепления рабочих секций чизельно-дискового орудия | 2024 |
|
RU2823650C1 |
| Адаптивная система управления жесткостью крепления рабочих секций чизельно-дискового орудия | 2024 |
|
RU2823649C1 |
Устройство мониторинга работы почвообрабатывающего орудия (варианты) относится к сельскому хозяйству, а именно к устройствам контроля глубины обработки почвы. Устройство по варианту 1, жестко закрепляемое на его раме с рабочими органами и заключенное в корпус, содержащее микроконтроллер (МК), обеспечивающий непрерывный прием данных, поступающих от подключенных датчиков, имеющих высокую точность и частоту измерения, и энергонезависимую память с объемом, позволяющим записывать и сохранять указанные данные, дополнительно содержит блок связи с удаленным компьютером, блок часов реального времени, датчик положения в пространстве, блок чтения RFID-метки, блок ПЗУ для хранения параметров шифрования данных и идентификаторов заявляемого устройства, блок питания, которые соединены электрическими связями с блоком МК и расположены на печатной плате, закрепленной внутри корпуса устройства. При этом устройство содержит датчик глубины обработки почвы, в качестве которого применен ультразвуковой дальномер, закрепленный на корпусе устройства и соединенный электрическими связями с микроконтроллером. При этом блок чтения RFID-метки выполнен с возможностью получения сигнала от RFID-метки по радиоканалу двунаправленному. Устройство по варианту 2 отличается от варианта 1 тем, что не содержит ПЗУ, а вариант 3 не содержит ПЗУ и RFID-метку. Изобретение позволит повысить точность мониторинга глубины обработки почвы в реальном времени и обеспечить возможность передачи информации в реальном времени на удаленный компьютер для обработки и хранения. 3 н. и 9 з.п. ф-лы, 6 ил.
1. Устройство мониторинга работы почвообрабатывающего орудия, жестко закрепляемое на его раме с рабочими органами и заключенное в корпус, содержащее микроконтроллер (МК), отличающееся тем, что дополнительно содержит блок связи с удаленным компьютером, блок часов реального времени (РВ), датчик положения в пространстве, блок чтения RFID-метки, блок постоянного запоминающего устройства (ПЗУ) для хранения параметров шифрования данных и идентификаторов заявляемого устройства, блок питания, которые соединены электрическими связями с блоком МК и расположены на печатной плате, закрепленной внутри корпуса устройства, при этом устройство содержит датчик глубины обработки почвы, в качестве которого применен ультразвуковой дальномер, закрепленный на корпусе устройства и соединенный электрическими связями с микроконтроллером, причем блок чтения RFID-метки выполнен с возможностью получения сигнала от RFID-метки по радиоканалу двунаправленному.
2. Устройство по п.1, отличающееся тем, что в состав блока питания входит контроллер питания и аккумуляторная батарея.
3. Устройство по п.2, отличающееся тем, что первый вход/выход блока МК подключен к входу/выходу блока ПЗУ, второй вход/выход блока МК подключен к входу/выходу блока памяти, третий вход/выход блока МК подключен к первому входу/выходу блока связи, четвертый вход/выход блока МК подключен к входу/выходу блока часов РВ, пятый вход/выход блока МК подключен к входу/выходу датчика ориентации, шестой вход/выход блока МК подключен к входу/выходу блока чтения RFID-метки, выход блока МК подключен к управляющему входу блока питания, первый вход блока МК подключен к выходу состояния блока питания, второй вход блока МК подключен к выходу дальномера ультразвукового, а второй вход/выход блока связи подключен к каналу связи с удаленным компьютером, при этом устройство содержит разъем питания, который с внутренней стороны подключен к входу питания блока питания, а его внешняя сторона предназначена для подключения кабеля сети бортовой к устройству, причем к силовому выходу блока питания подключена шина питания, подключенная к входам питания всех расположенных на плате блоков и к блоку дальномера ультразвукового.
4. Устройство мониторинга работы почвообрабатывающего орудия, жестко закрепляемое на его раме с рабочими органами и заключенное в корпус, содержащее микроконтроллер (МК), обеспечивающий непрерывный прием данных, поступающих от подключенных датчиков, имеющих высокую точность и частоту измерения, и энергонезависимую память с объемом, позволяющим записывать и сохранять указанные данные, отличающееся тем, что дополнительно содержит блок связи с удаленным компьютером, блок часов реального времени (РВ), датчик ориентации, блок чтения RFID-метки, которые соединены электрическими связями с блоком МК и расположены на печатной плате, закрепленной внутри корпуса устройства, при этом устройство содержит датчик глубины обработки почвы, в качестве которого применен ультразвуковой дальномер, закрепленный на корпусе устройства и соединенный электрическими связями с микроконтроллером, причем блок чтения RFID-метки выполнен с возможностью получения сигнала от RFID-метки по радиоканалу двунаправленному.
5. Устройство по п.4, отличающееся тем, что в состав блока питания входит контроллер питания и аккумуляторная батарея.
6. Устройство по п.5, отличающееся тем, что первый вход/выход блока МК подключен к входу/выходу блока памяти, второй вход/выход блока МК подключен к первому входу/выходу блока связи, третий вход/выход блока МК подключен к входу/выходу блока часов РВ, четвертый вход/выход блока МК подключен к входу/выходу датчика ориентации, пятый вход/выход блока МК подключен к входу/выходу блока чтения RFID-метки, выход блока МК подключен к управляющему входу блока питания, первый вход блока МК подключен к выходу состояния блока питания, второй вход блока МК подключен к выходу дальномера ультразвукового, а второй вход/выход блока связи подключен к каналу связи с удаленным компьютером, при этом устройство содержит разъем питания, который с внутренней стороны подключен к входу питания блока питания, а его внешняя сторона предназначена для подключения кабеля сети бортовой к устройству, причем к силовому выходу блока питания подключена шина питания, подключенная к входам питания всех расположенных на плате блоков и к блоку дальномера ультразвукового.
7. Устройство по любому из пп.1 или 4, отличающееся тем, что RFID-метка установлена на платформе, жестко закрепленной на раме почвообрабатывающего орудия, причем корпус устройства соединен одной своей стенкой с платформой, при этом указанная стенка содержит нишу, а RFID-метка, закрепленная на платформе, закрыта указанной нишей.
8. Устройство мониторинга работы почвообрабатывающего орудия, жестко закрепляемое на его раме с рабочими органами и заключенное в корпус, содержащее микроконтроллер (МК), обеспечивающий непрерывный прием данных, поступающих от подключенных датчиков, имеющих высокую точность и частоту измерения, и энергонезависимую память с объемом, позволяющим записывать и сохранять указанные данные, отличающееся тем, что дополнительно содержит блок связи с удаленным компьютером, блок часов реального времени (РВ), датчик положения в пространстве, блок питания, которые соединены электрическими связями с блоком МК и расположены на печатной плате, закрепленной внутри корпуса устройства, при этом устройство содержит датчик глубины обработки почвы, в качестве которого применен ультразвуковой дальномер, закрепленный на корпусе устройства и соединенный электрическими связями с микроконтроллером.
9. Устройство по п.8, отличающееся тем, что в состав блока питания входит контроллер питания и аккумуляторная батарея.
10. Устройство по п.9, отличающееся тем, что первый вход/выход блока МК подключен к входу/выходу блока памяти, второй вход/выход блока МК подключен к первому входу/выходу блока связи, третий вход/выход блока МК подключен к входу/выходу блока часов РВ, четвертый вход/выход блока МК подключен к входу/выходу датчика ориентации, выход блока МК подключен к управляющему входу блока питания, первый вход блока МК подключен к выходу состояния блока питания, второй вход блока МК подключен к выходу дальномера ультразвукового, а второй вход/выход блока связи подключен к каналу связи с удаленным компьютером, при этом устройство содержит разъем питания, который с внутренней стороны подключен к входу питания блока питания, а его внешняя сторона предназначена для подключения кабеля сети бортовой к устройству, причем к силовому выходу блока питания подключена шина питания, подключенная к входам питания всех расположенных на плате блоков и к блоку дальномера ультразвукового.
11. Устройство по любому из пп.1, 4 или 8, отличающееся тем, что датчик ориентации содержит трехосный акселерометр, трехосный гироскоп и трехосный магнитометр.
12. Устройство по любому из пп.1, 4 или 8, отличающееся тем, что корпус устройства выполнен герметичным и радиопрозрачным.
| 0 |
|
SU191181A1 | |
| Комбинированный противоаварийный переходник | 1955 |
|
SU110476A1 |
| СПОСОБ КВАДРАТНОГО РАЗМЕЩЕНИЯ СЕМЯН, КЛУБНЕЙ (ГНЕЗДАМИ) ИЛИ РАССАДЫ | 1954 |
|
SU102108A1 |
| Установка для извлечения и использования крахмала солодового молока в производстве спирта | 1958 |
|
SU121420A1 |
| ДИСТАНЦИОННОЕ РЕГУЛИРОВАНИЕ РЯДНОГО БЛОКА УСТРОЙСТВА СЕЛЬСКОХОЗЯЙСТВЕННОГО НАЗНАЧЕНИЯ | 2012 |
|
RU2562211C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ОБРАБОТКОЙ ПОЧВЫ СЕЛЬСКОХОЗЯЙСТВЕННЫМ ОРУДИЕМ (ВАРИАНТЫ) | 2013 |
|
RU2580449C2 |

