Изобретение относится к области автоматизации и роботизации, а именно к разработке универсальных роботизированных систем, предназначенных для выполнения различных сельскохозяйственных операций.
Изобретение обеспечивает выполнение работы на сельскохозяйственных угодьях, включая, но не ограничиваясь, обработку почвы, сев, уход за посевами, сбор урожая, подкормку и обработку растений. Таким образом, данное изобретение относится к сельскохозяйственной технике и к сфере создания автоматизированных решений для управления сельскохозяйственными процессами. Изобретение в широком смысле относится к категории сельскохозяйственных машин и орудий, в частности автоматизированных и роботизированных машин, используемых в сельском хозяйстве (Международная патентная классификация (IPC) A01B 51/00, A01B 51/02). Однако благодаря своей универсальной и адаптируемой природе, изобретение может быть использовано для множества применений в широком спектре сельскохозяйственных задач и функций, включая обработку почвы, посадку, внесение удобрений, управление растениеводством, борьбу с вредителями, орошение и сбор урожая. Учитывая интеграцию искусственного интеллекта и машинного обучения, изобретение относится к области систем или методов обработки данных, специально адаптированных для сельскохозяйственных целей; систем управления или приведения в действие на основе искусственного интеллекта для таких автоматизированных и роботизированных машин.
В настоящее время существует несколько различных типов сельскохозяйственной техники и роботизированных систем для выполнения различных сельскохозяйственных операций. Эти задачи включают в себя внесение удобрений и пестицидов, орошение, сбор урожая и многое другое. Рассмотренные системы включают мобильные средства с GPS-навигацией, беспилотные летательные аппараты для мониторинга урожая и автоматизированные системы орошения. Существующие роботизированные системы были разработаны для выполнения конкретных задач, однако этим системам, как правило, не хватает универсальности, и их нелегко адаптировать для других сельскохозяйственных задач. Они предназначены для определённых задач, что ограничивает их полезность в фермерских условиях, где спектр задач огромен и разнообразен. Российские патенты, находящиеся в открытом доступе, описывают роботизированные платформы, способные выполнять определённые сельскохозяйственные задачи. Известны изобретения: RU 2492620 C2 - «Сельскохозяйственный робот», предназначенный главным образом для обработки посадок и уборки бахчевых овощных культур, состоящий из двух кареток с приводными от двигателя колёсами, навигационным оборудованием, рабочими органами воздействия на почву, а также транспортёром для перемещения продукции. Недостатком данного устройства является узкий профиль выполняемых задач, а также низкая приспособленность к тяговым характеристикам на влажных грунтах. Известно устройство RU 2728225 C1 - «Сельскохозяйственный робот-комбайн» для уборки урожая бахчевых и ягодных культур на открытом грунте в безлюдном режиме, состоящий из транспортной платформы со свободными и приведёнными от двигателя колёсными движителями, производственных секций с манипуляторами для отделения продукции от посадок, сортировочного устройства, бункера для собранной продукции, системы транспортировки продукции в сортировочное устройство, аппаратно-программного комплекса для сканирования посадок, навигационного и позиционирующего устройств. Недостатком данного устройства также является ориентация на конкретные задачи, что делает невозможным приспособить данного робота для выполнения иных сельскохозяйственных операций. Наиболее близким по технической сущности к заявленному изобретению (прототипом) является RU 2701663 C1 - «Роботизированный гусеничный опрыскиватель для обработки сельскохозяйственных культур», включающий систему опрыскивания с ёмкостью для рабочего раствора, трубопроводами, арматурой, штангой и узлами форсунок, смонтированную на шасси, содержащем раму, ходовую систему и привод, энергетическую установку и систему управления. Недостатком технического решения, принятого за прототип, является сложность перепрофилирования устройства под другие нужды, требующие значительных изменений конструкции. А также не оптимальное расположение конструктивных элементов, что ухудшает устойчивость технического решения, а также ограничивает расположение рабочих органов.
Задача изобретения заключается в разработке и создании многофункциональной системы, повышенной проходимости и устойчивости, способной автоматизировать и улучшить различные задачи сельского хозяйства. Эта платформа должна быть способна выполнять широкий спектр задач, связанных с подготовкой почвы, производством и обработкой сельскохозяйственных культур в автоматизированном режиме при различных погодных условиях.
Поставленная задача решается за счет того, что конструкция гусеничного движителя имеет оптимальное, с точки зрения устойчивости, эффективности и универсальности расположение конструктивных элементов, исключая ограничения конструкции основной рамы, позволяя реализовать быстросъемные механизмы гусеничного движителя, а также применением алгоритмов с использованием нейронных сетей для управления движением разработанной конструкции.
Техническим результатом заявляемого изобретения является энергоэффективная универсальная роботизированная платформа повышенной проходимости, предназначенная для автоматизации широкого спектра сельскохозяйственных задач. Обеспечивая возможность эффективного агрегирования с другими навесными/прицепными сельскохозяйственными машинами.
Технический результат обеспечивается тем, что роботизированная сельскохозяйственная платформа представляет собой автономную мобильную базу, предназначенную для навигации по ландшафтам, встречающимся в сельскохозяйственных условиях, причем указанная база оснащена основной рамой, кузовом, гусеничным движителем, двумя электродвигателями, редукторами, по одному на каждую гусеницу, конструктивно совмещенным ленивцем, поддерживающим катком, натяжителем и амортизатором гусеницы, обеспечивая простоту конструкции, и имеет быстросъемные механизмы, позволяющие установить рамы для выполнения задач, не ограничивая конструктивное исполнение и высоту агротехнического просвета, причем компоновкой узлов гусеничного движителя за счёт расположения электродвигателя в габаритах гусеничного движителя ближе к геометрическому центру тяжести обеспечивается устойчивость платформы, а также исключается влияние на конструкцию основной рамы ввиду отсутствия передачи механической мощности от основной рамы к гусеничному движителю, кроме того, указанная база оснащена блоком электроники, содержащим литиевые батареи, зарядное устройство, драйверы электродвигателей и набор датчиков, и использует алгоритмы искусственного интеллекта для обеспечения курсовой устойчивости на основе нормализованных текущих и накопленных значений датчиков линейного и углового ускорения, магнитного датчика, GPS/ГЛОНАСС, тахометра, видео-/фотокамеры.
Изобретение поясняется чертежами, иллюстрирующими вариант конструкции платформы:
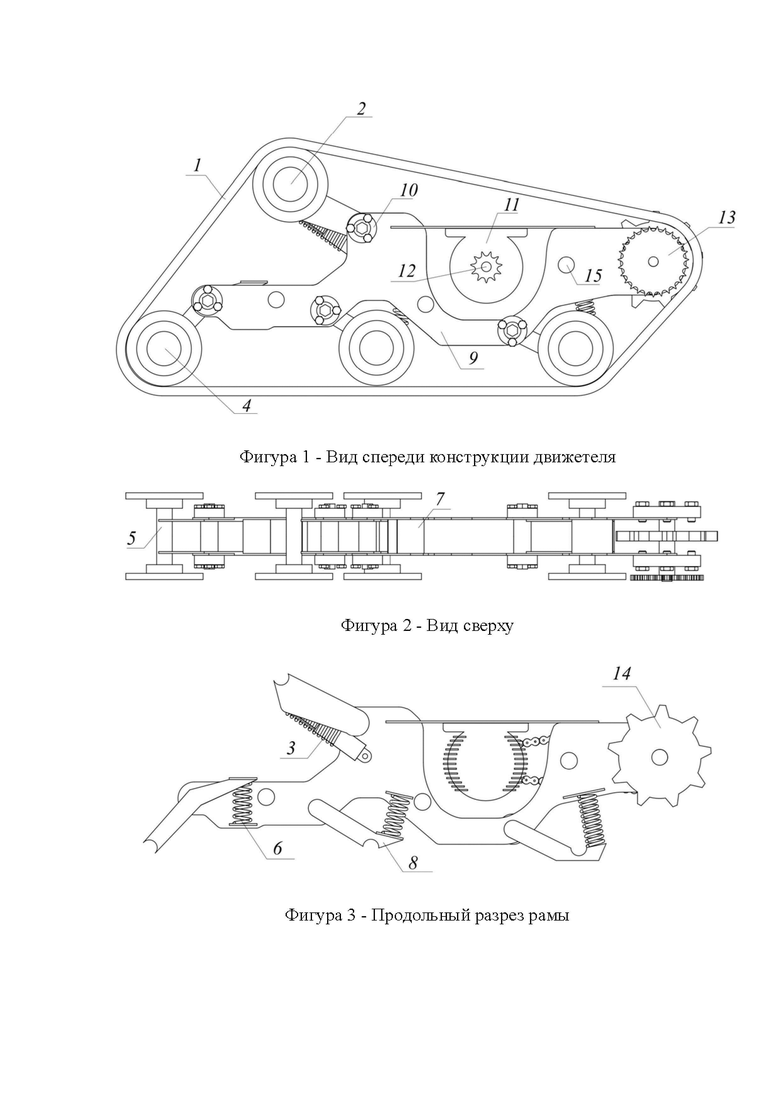
На фигуре 1 - вид спереди конструкции движителя.
На фигуре 2 - вид сверху.
На фигуре 3 - продольный разрез рамы.
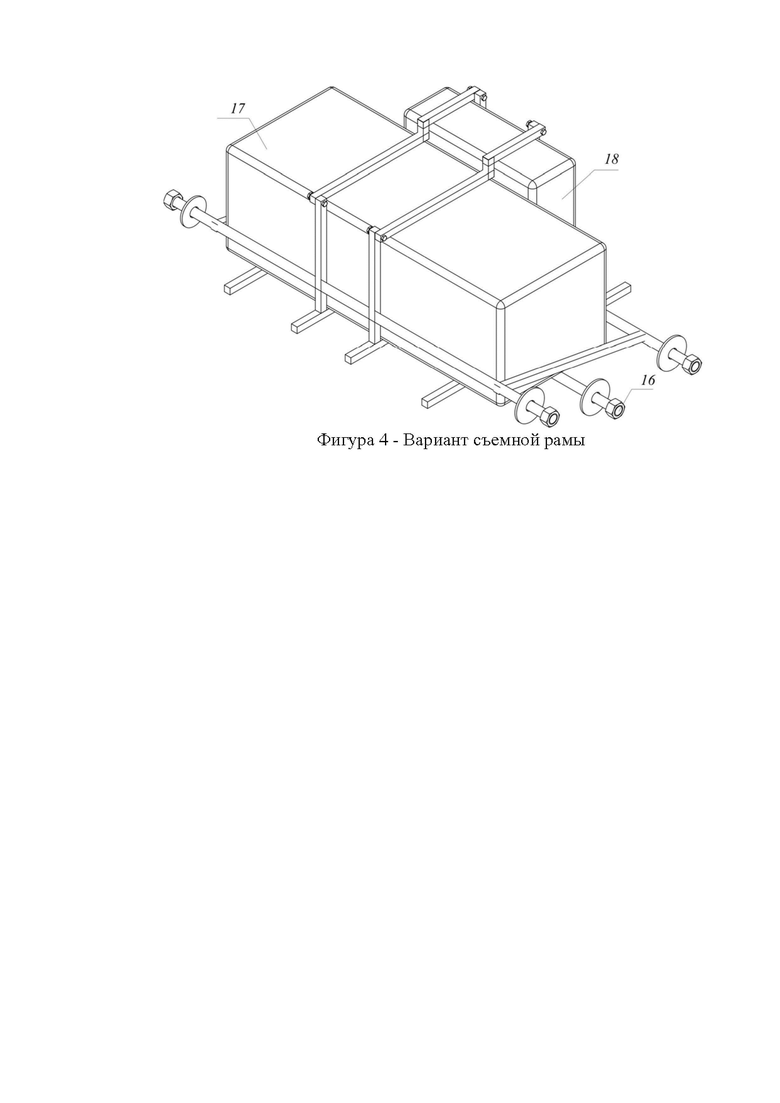
На фигуре 4 - вариант съемной рамы.
Заявленное решение представляет собой платформу на базе гусеничного движителя (фигура 1), имеющего резинометаллическую гусеницу 1, поддерживающий каток 2, соединённый с устройством натяжения гусеницы 3, совмещающим функции амортизатора для гашения колебаний, три и более опорных катка 4, установленных на валу 5, соединённых при помощи пружин подвески 6, опирающихся на плоскую опору 7 и рычагов подвески 8 с рамой 9, через подшипники, установленные в корпус подшипника 10. На раме установлен электродвигатель 11, сосредоточенный в габаритах гусеничного движителя близко к геометрическому расположению центра тяжести, что повышает устойчивость платформы, а также исключает влияние на геометрию основной рамы в виду отсутствия передачи механической мощности на гусеничный движитель, с установленной на нем ведущей звездой 12, осуществляющей передачу крутящего момента, посредством цепной передачи на ведомую звезду 13, с последующим вращением приводной звезды гусеницы 14. В раме 9 предусмотрены отверстия 15 для соединения с основной съёмной рамой (фигура 2), позволяя легко адаптировать платформу под необходимые задачи, имеющую механизм соединения 16 с гусеничным движителем, необходимое навесное/прицепное оборудование 17, блок электроники 18 с применением взаимосвязанного электропривода, где связь электроприводов гусеничных движителей достигается за счёт применения алгоритмов искусственного интеллекта для стабилизации движения на грунтах различных типов и различной влажности, опираясь на показания сенсоров/датчиков: акселерометра, гироскопа, магнитного датчика, тахометра, камеры с компьютерным зрением и других, для выполнения заданного перемещения вне зависимости от вертикальной и горизонтальной нагрузки на платформу.
Заявленное устройство работает следующим образом.
При включении платформы, в соответствии с установленным программным обеспечением, посредством сети интернет/wifi/bluetooth, платформа подключается к управляющему устройству и скачивает запланированные задания, после чего переходит в режим ожидания до наступления условия начала выполнения задания. При этом условия могут включать в себя как временные метки, так и показания датчиков, например, температуры и влажности. До начала выполнения следующего задания, платформа производит диагностику, а также наличие необходимых для задания прицепных/навесных сельскохозяйственных машин, результаты которой отправляет на сервер. В случае если все проверки прошли успешно, платформа выполняет загруженное задание, представляющее собой набор команд по перемещению в заданную точку с заданной линейной и угловой скоростью, а также набор команд управления прицепными/навесными машинами. Курсовая устойчивость платформы, главным образом, достигается за счёт применения алгоритмов искусственного интеллекта, на вход которым передаются текущие и накопленные нормализованные значения показаний датчиков линейного и углового ускорения, показания разности желаемого и действительного угла векторов магнитного поля, а также модуль расстояния между желаемой и фактической точкой сигнала GPS/ГЛОНАСС. Выход модели представляет собой два значения, передаваемых на соответствующий драйвер управления электродвигателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона | 2021 |
|
RU2770713C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Мобильный гусеничный трактор | 2021 |
|
RU2759691C1 |
| Роботизированная платформа специального назначения | 2016 |
|
RU2640264C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Способ конфигурирования роботизированного курьерского комплекса | 2024 |
|
RU2830322C1 |
| РОБОТИЗИРОВАННАЯ ПЛАТФОРМА ТРАНСПОРТИРОВКИ ЛЮДЕЙ И ГРУЗОВ | 2024 |
|
RU2836942C1 |
| СТАБИЛИЗАТОР КУРСА ДВИЖЕНИЯ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА ПО СТУПЕНЯМ | 2013 |
|
RU2538653C1 |
Изобретение относится к сельскому хозяйству. Роботизированная сельскохозяйственная платформа представляет собой автономную мобильную базу, предназначенную для навигации по ландшафтам, встречающимся в сельскохозяйственных условиях. Автономная мобильная база оснащена основной рамой, кузовом, гусеничным движителем, двумя электродвигателями, редукторами, по одному на каждую гусеницу, конструктивно совмещенным ленивцем, поддерживающим катком, натяжителем и амортизатором гусеницы, обеспечивая простоту конструкции, и имеет быстросъемные механизмы, позволяющие установить рамы для выполнения задач, не ограничивая конструктивное исполнение и высоту агротехнического просвета. Компоновкой узлов гусеничного движителя за счёт расположения электродвигателя в габаритах гусеничного движителя ближе к геометрическому центру тяжести обеспечивается устойчивость платформы, а также исключается влияние на конструкцию основной рамы ввиду отсутствия передачи механической мощности от основной рамы к гусеничному движителю. Автономная мобильная база оснащена блоком электроники, содержащим литиевые батареи, зарядное устройство, драйверы электродвигателей и набор датчиков, и использует алгоритмы искусственного интеллекта для обеспечения курсовой устойчивости на основе нормализованных текущих и накопленных значений датчиков линейного и углового ускорения, магнитного датчика, GPS/ГЛОНАСС, тахометра, видео-/фотокамеры. Обеспечивается энергоэффективная универсальная роботизированная платформа повышенной проходимости, предназначенная для автоматизации широкого спектра сельскохозяйственных задач с возможностью эффективного агрегирования с другими навесными/прицепными сельскохозяйственными машинами. 4 ил.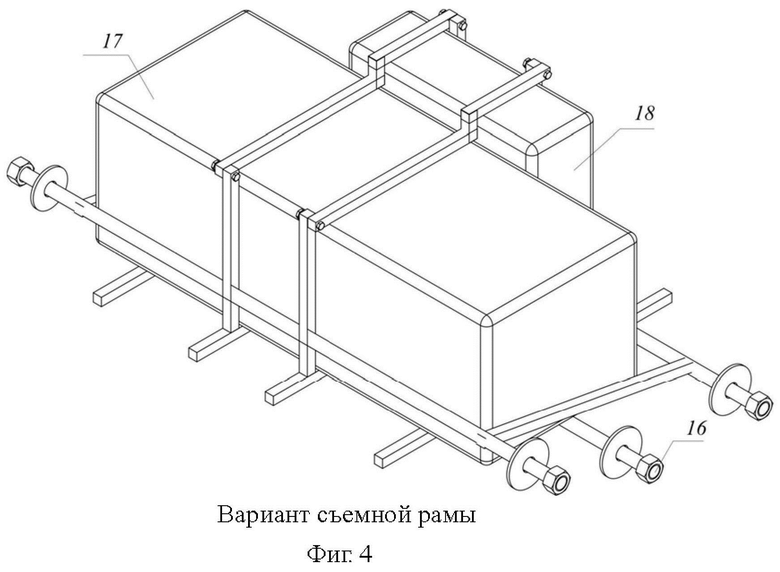
Роботизированная сельскохозяйственная платформа, характеризующаяся тем, что представляет собой автономную мобильную базу, предназначенную для навигации по ландшафтам, встречающимся в сельскохозяйственных условиях, причем указанная база оснащена основной рамой, кузовом, гусеничным движителем, двумя электродвигателями, редукторами, по одному на каждую гусеницу, конструктивно совмещенным ленивцем, поддерживающим катком, натяжителем и амортизатором гусеницы, обеспечивая простоту конструкции, и имеет быстросъемные механизмы, позволяющие установить рамы для выполнения задач, не ограничивая конструктивное исполнение и высоту агротехнического просвета, причем компоновкой узлов гусеничного движителя за счёт расположения электродвигателя в габаритах гусеничного движителя ближе к геометрическому центру тяжести обеспечивается устойчивость платформы, а также исключается влияние на конструкцию основной рамы ввиду отсутствия передачи механической мощности от основной рамы к гусеничному движителю, кроме того, указанная база оснащена блоком электроники, содержащим литиевые батареи, зарядное устройство, драйверы электродвигателей и набор датчиков, и использует алгоритмы искусственного интеллекта для обеспечения курсовой устойчивости на основе нормализованных текущих и накопленных значений датчиков линейного и углового ускорения, магнитного датчика, GPS/ГЛОНАСС, тахометра, видео-/фотокамеры.
| US 2024176352 A1, 30.05.2024 | |||
| US 2021219481 A1, 22.07.2021 | |||
| US 2021212249 A1, 15.07.2021 | |||
| CN 208665367 U, 29.03.2019 | |||
| EP 0803428 A1, 29.10.1997 | |||
| US 2021101650 A1, 08.04.2021 | |||
| US 6671582 B1, 30.12.2003 | |||
| WO 2014111898 A2, 24.07.2014 | |||
| СЪЕМНЫЙ ГУСЕНИЧНЫЙ БЛОК ТРАНСПОРТНОГО СРЕДСТВА (ДВА ВАРИАНТА) | 2005 |
|
RU2309080C2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

